DSP2812 复习题
一题名词解释20
哈佛结构,流水线,MIPS,MAC,MOPS,MFLOPS,DARAM(双访问存储器),SCI,SPI,UART,CAN,
二题填空题25
●DSP的选择应从数据格式,数据宽度,运算速度,存储器的安排,开发的难易程度,支持多处
理器,功耗和电源管理以及器件的封装几个方面来考虑。
●CAN的通信距离最远可达10KM(传输速度为5Kbps);最高通信速度可达1Mbps(传输距离40m)。
●TMS320F240x中串行外设接口SPI是一个高速的同步串行输入输出接口,其可编程的传输数据
长度为 1~16位,工作于全双工时需要4个引脚参与数据传送,它们分别是SPISIMO,SPISOMI,SPISTE,SPICLK ,并且具有两种工作方式,分别为主模式和从模式
●串行总线与并行总线相比,具有较少的控制和数据线的优点,因而得到广泛应用。串行接口可
分为三种,分别为单总线、双总线和多总线接口。SPI属于多总线接口。SCI属于双总线接口。
●哈佛结构可以获得更高的数据处理速度。TMS320F2407 采用了增强哈佛结构总线数目一共有6
条,它们分别是PAB,DRAB,DWAB,PRDB,DRDB,DWDB
●看门狗能保证芯片安全可靠运行,在工业控制中是不可或缺的一环。TMS320F240x系列的DSP
的看门狗的关键字是什么,为避免DSP复位,必须在规定时间内给看门狗写关键字。请说明MS320F240x系列的DSP的看门狗的关键字是什么?以及怎样写这个关键字,请用C编写一段给看门狗写关键字的程序。
●DSP2000系列一般都配有多种串行通信的片内外设,SCI就是其中一种。SCI具有两种通信模式,分别是半
双工或全双工模式通信。
●CAN支持四种帧模式,它们分别是数据帧,远程帧错误帧,过载帧,
●DSP中一般有多个片上串行接口,比如SCI、SPI。使用这些片内外设时,CPU读取或写数据
一般可采用两种方式,它们是中断和查询。
●
三题简答题 25
2、试画出基本DSP系统的构成图,并加以说明。(P2页)
3、试画出DSP应用系统的设计流程图,并加以说明(P3页)
4、简述什么是DSP(数字信号处理器),其有什么特点?(P5)
5、试说明TI公司DSP芯片分类及其各自的特点和应用范围。(P6)
6、简述TMS320F240x 的SCI通信接口的特点;(见下)
7、简述TMS320F240x 的SPI通信接口的特点;(见下)
8、简述TMS320F240x CAN总线的特点。(见下)
9、SCI有两种帧格式,分别是什么?SCI在进行多机通信时,也有两种处理器模式,请分别说明这两种模式的
工作过程。
10、TMS32SLF240x的锁相环PLL可以产生4种时钟信号,它们分别是什么么?。
11、为了减小能量的损耗,微处理器等都具有低功耗模式。DSP也不例外,请本别说明TMS320LF240X的四种低功耗模式,以及所对应的状态。
12、DSP的SCI 有两种帧模式,请分别说明其特点。有两种多处理器模式,它们是什么并分别加以说明。P48-52
13、TMS320LF240X的具有10位的AD转换,由于其特殊的结构,其工作形式灵活多样。如内置的采样-保持器,具有适应输入阻抗的功能。请写出对这句话的理解,并加以具体说明。(P71-76)
14、请分别说明DSP排序器SEQ1与SEQ2工作在单排序模式和双单排序器模式下的工作原理。
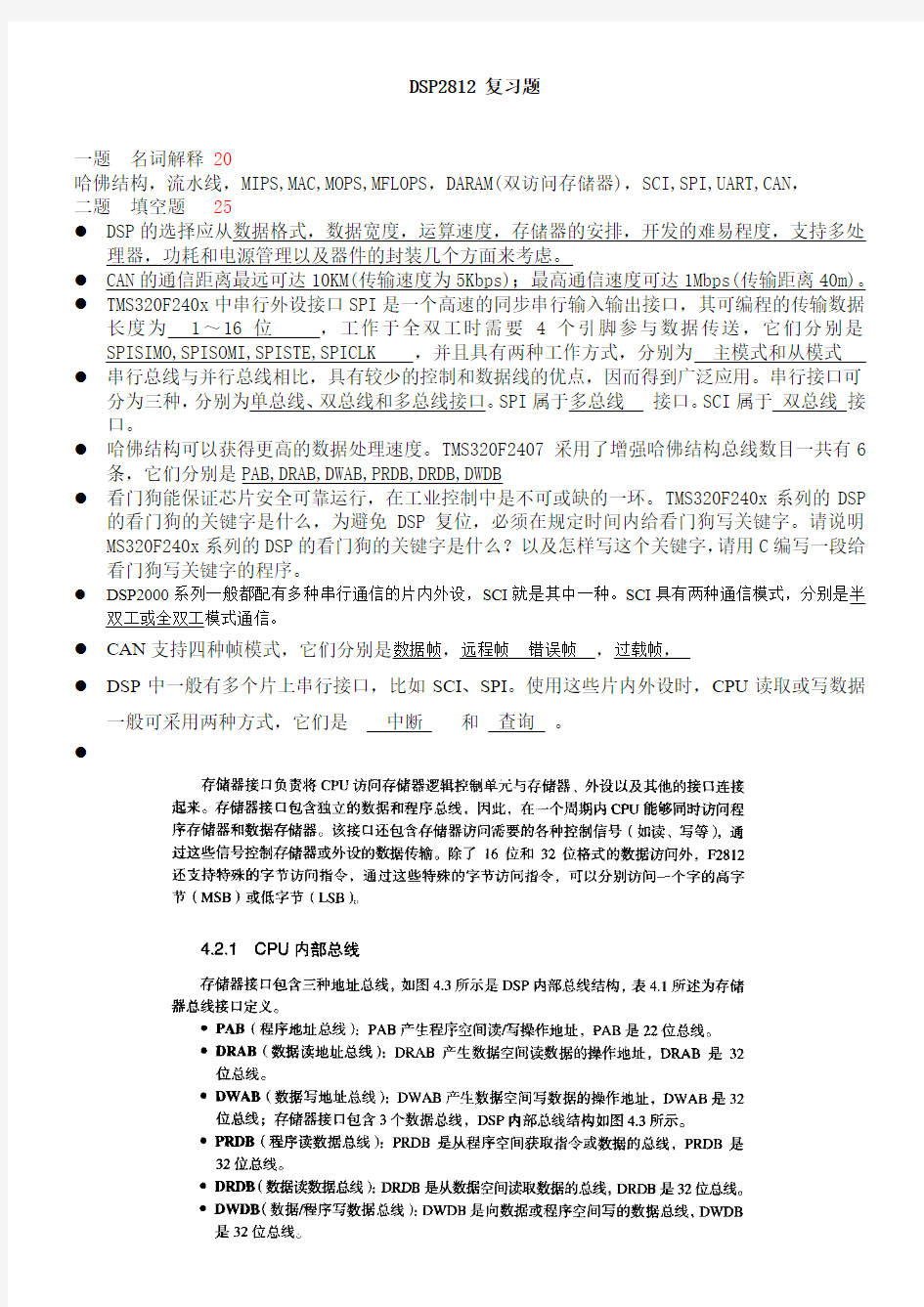
15、DSP的AD转换使用排序器的启动/停止模式。触发信号1(定时器下溢)启动3个自动转换(如I1、I2、I3),触发信号2(定时器周期)启动3个自动转换(如V1、V2、V3)。两个触发信号在时间上是分开的,时间间隔为25微秒,并且由事件管理器A提供,如下图所示。排序器用SEQ1。
请写出排序控制寄存器(CHSELSEQn)的设置,并对AD转换过程加以说明。(P71-76)
串行通信接口(SCI)
SCI接口模块:实现与其它外设之间的异步串行数据通信。波特率可编程。
SCI的发送器与接收器都是双缓冲的。各自有工作使能和中断控制。可工作于全双工模式。
9.1 概述
9.1.1 串行通信接口的物理描述
内部结构如图所示。
(1)两个I/O引脚:SCIRXD与SCITXD
(2)一个16位的波特率选择寄存器可编程,可得到65536种的不同速率。
(3)1-8位的可编程数据位。
(4)长度为1位或2位的可编程停止位。
(5)内部产生的串行时钟。
(6)四个错误的检测标志:
奇偶性错误、超限错误、帧错误、间断检测
(7)两种唤醒多处理器模式:
空闲线唤醒、位寻址唤醒
(8)半双工或全双工。
(10)发送和接收操作均可通过中断或查询进行。
(11)非归零格式(NRZ)。
9.1.2 SCI模块的结构
模块主要包括以下部件:
(1)发送器-TX
SCITXBUF-发送数据缓冲寄存器,存发送数据。TXSHF-发送移位寄存器,每次1位送到SCITXD
引脚。
(2)接收器-RX
RXSHF-接收移位寄存器,每次1位将SCIRXD引脚上的数据移入。SCIRXBUF-接收数据缓冲寄存器,存RXSHF 接收到数据。
(3)一个可编程的波特率发生器。
(4)控制和状态寄存器(映射在数据存储器区)。
9.1.3 SCI模块的寄存器地址
地址寄存器名称
7050hSCICCR SCI通信控制寄存器
7051hSCICTRL1SCI控制寄存器1
7052hSCIBAUD 波特率选择寄存器高8位
7053hSCIBAUD 波特率选择寄存器低8位
7054hSCICTRL2 SCI控制寄存器2
7055hSCIRXST SCI接收器状态寄存器
7056hSCIRXEMU SCI仿真数据缓冲寄存器
7057hSCIRXBUF SCI接收器数据缓冲寄存器
7059hSCITXBUF SCI发送数据缓冲寄存器
705FhSCIPRISCI优先级控制寄存器
9.1.4 多机异步通信模式
SCI提供了与许多外设的UART通信模式。异步模式需要两条线与标准设备接口,如使用RS-232C格式的
终端和打印机等。
SCI有两种多处理器协议:
(1)空闲线路多处理器模式。
(2)地址位多处理器模式。
这些协议允许在多个处理器之间进行有效的数据传输。
9.2 可编程的数据格式
串行通信接口可的数据无论是接收还是发送都采用NRZ(非归零)格式,NRZ包括以下组成部分:
?1个起始位
?1-8个数据位.
?1个或无奇偶校验位
?1-2个停止位
?1个从数据中识别地址的附加位(仅用于地址模式)
基本单位为一个字符,其长度为1-8位。数据的每个字符格式化为1个起始位,1-2个停止位和可选的奇偶校验位和地址位,如图所示。
注意:带有格式化信息数据的一个字符称为一个字符帧
为了对数据格式化进行编程,要使用SCI通信控制寄存器(SCICCR)。用于对数据格式进行编程的
位如表所示。
表对数据格式进行编程的位位功能
SCICCR.2-0 选择字符长度(1-8位)
SCICCR.5是否选择奇偶校验功能
SCICCR.6选择奇偶校验,1-偶,0-奇
SCICCR.7停止位的个数,1-1个,0-2个
9.3 SCI多处理器通信
多处理器通信中一条串行线上只能有一个信息源。
地址字节
信息源发送的数据块的第一个字节为一地址字节,它被所有的接收器读取,但只有地址正确的接收器才能被紧随地址字节后面的数据字节中断,地址不正确的接收器不被中断,直到下一个地址字节。
SLEEP位
串行线路上的所有处理器将它们的串行通信接口的
SLEEP位(SClCTL1.2)设置为1,仅在检测到地址字节时才被中断。当一个处理器读取到的一个数据块地址与本器件地址相一致时,用户程序必须清除SLEEP位来确保串行通信接口在收到每个数据字节时产生一个中断。
尽管当SLEEP位为1时,接收器仍能工作,但它不会使RXRDY、RXINT或任何接收错误状态位设置为1,除非检测到地址字节,且接收到的帧的地址位是1。
SLEEP位必须由用户软件改变。
识别地址字节
处理器根据多处理器的模式来识别一个地址字节,例如:
?空闲线模式在地址字节前留有一段静空间。该模式没有一个附加的地址/数据位,在处理包含多于10个字节的数据块的情况下,其效率比地址位模式更高。
?地址位模式为每个字节增加一个附加位(地址位)来从数据中识别地址。该模式在处理多个小数据块时更有效。与空闲线模式不一样,因为它在数据块之间不需要等待。但在大数据块传输中效率不如空闲线模式。
控制SCI Tx和Rx特性
多处理器的模式可通过ADDR/IDLE MODE位(SCICCR.3)来设置。
两种模式都使用TXW AKE位(SCICTL1.3)、RXW AKE位(SCIRXST.1)和SLEEP标志位(SCICTL1.3)来控制串行通信接口发送器和接收器的工作状态。
接收顺序:在两种多处理器模式中,接收顺序如下:
(1)在接收一个地址块时,串行通信接口唤醒并请求一个中断(中断必须被使能)。它读取地址块的第一帧数据,其中包括目的地址。
(2)通过中断和检查程序引入的地址进入一个软件服务程序,并且该地址字节与保存在内存中的本器件地址再次进行校对。
(3)如果检查表明此块是DSP控制器的地址,则CPU清除SLEEP位并读块的其余部分,如果不是,则退出软件子程序,SLEEP位设置为1,直到下一个地址块开始才接收中断。
ADDR/IDLE MODE=0,数据块被块间的时间间隔分开,该时间间隔比块中数据帧之间的时间间隔要长。一帧后的空闲时间(十个或更多的高电平位)表明了一个新块的开始,单个位的时间可以由波特率值算出。
9.3.2 地址位多处理器模式ADDR/IDLE MODE位=1,每帧中有一附加的地址位紧跟在最后一个数据位后。在数据块的第一帧中,地址位设为1,而在其它所有的帧中置成0。空闲周期的时间是不相连的。
9.4 SCI通信模式
SCI异步通信可使用半双工或全双工模式通信。在这种模式下,一个帧包括1个起始位、1-8个数据位、1个可选的奇偶校验位以及1-2个停止位。每个数据占8个SCICLK周期。
接收器在接收到一个有效的起始位后开始工作。一个有效的起始位由4个连续的内部SCICLK周期的零位来识别。如果任何一个位都不为0,则处理器重新启动并开始寻找另一个起始位。
DSP2000系列一般都配有多种串行通信的片内外设,SCI就是其中一种。SCI具有两种通信模式,分别是半双工或全双工模式通信。
对于起始位后的位,处理器通过在其中间进行三次采样来判定其位值。采样点位于第4、5、6个SCICLK周期。如果三次采样有两次为某值,则判定为该值。
9.5 SCI中断
SCI的接收器和发送器可以由中断控制,SCICTL2寄存器中有一个标志位(TXRDY)表示有效的中断条件,SCIRXST寄存器有两个中断标志位(RXRDY和BRKDT)和接收错误标志位(RX ERROR),其中RX ERROR 是FE、OE和PE条件的逻辑或。发送器和接收器有各自的中断使能位。
当中断被屏蔽时,不会产生中断,但条件标志位仍有效,该位反映了发送和接收的状态,可用于查询方式。
串行通信接口(SCl)的发送器和接收器有自己独立的外设中断向量。
外设中断请求可使用高优先级或低优先级,中断优先级由SCIPRI寄存器中相应的位来控制。当接收和发送中断都设置为相同的优先级时,接收中断往往具有更高的优先级,这样可以减少接收超时错误。
如果RX/BK INT ENA位(SCICTL2.1)置1,则当发生以下事件之一就产生一次接收中断:
(1)SCI接收到一个完整的帧并将RXSHF寄存器中的内容传送到SCIRXBUF寄存器,该操作会置位RXRDY (SCIRXST.6),并初始化中断。
(2)间断检测条件发生(在一个丢失的停止位之后,SCIRXD引脚保持10个周期的低电平)。该操作会设置BRKDT标志位,并初始化中断。
如果TX INT ENA位(SCICTL2.0)置位,当SCITXBUF寄存器中的数据传送到TXSHF寄存器时,将产生一个发送中断请求,用以表示CPU可以写数据到SCITXBUF
寄存器中,该操作会置位TXRDY标志-SCICTL2.7,并初始化一个中断。
9.6 SCI波特率计算
内部产生的串行时钟由系统时钟频率CLKOUT和两个波特率选择寄存器决定。SCI使用16位的波特率选择寄存器来选择65536种不同的串行时钟频率中的一种。
SCI波特率选择寄存器为SCIHBAUD(高字节)和SCILBAUD(低字节),连一起形成16位的波特率值——BRR。
9.7 SCI控制寄存器
9.7.1 SCI通信控制寄存器(SCICCR)
9.7.2 SCI控制寄存器1(SCICTL1)
9.7.3 波特率选择寄存器(SCIHBAUD,SCILBAUD)
9.7.4 SCI控制寄存器2(SCICTL2)
9.7.5 SCI接收状态寄存器(SCIRXST)
9.7.6 SCI接收数据缓冲寄存器(SCIRXEMU,SCIRXBUF)
9.7.7 SCI发送数据缓冲寄存器(SCITXBUF)
7、简述TMS320F240x 的SPI通信接口的特点;
串行外设接口SPI
SPI:高速同步串行输入/输出端口,传送速率可编程,
应用:外部移位寄存器、D/A、A/D、串行EEPROM、LED显示驱动器等外部设备进行扩展。
10.1 串行外设接口的结构
(1)4个外部引脚,以下引脚都可用作数字I/O引脚。
?SPISIMO-SPI从输入、主输出
?SPISOMI-SPI主输入、从输出
?SPICLK -SPI时钟
?SPISTE*-SPI从发送使能
(2)主/从操作模式。
(3)发送、接收双缓冲。
SPI模块中有9个寄存器用于控制该模块的操作:
(1)SPICCR:SPI配置控制寄存器。
(2)SPICTL:SPI操作控制寄存器。
(3)SPISTS:SPI状态寄存器。
(4)SPIBRR:SPI波特率寄存器。
(5)SPIRXEMU:SPI仿真缓冲寄存器。
(6)SPIRXBUF:SPI串行输入缓冲寄存器。
(7)SPITXBUF:SPI串行发送缓冲寄存器。
(8)SPIDA T:SPI串行数据寄存器。
(9)SPIPRI:SPI优先级控制。
10.2 SPI操作
下图是SPI用于两个控制器(一个主控制器和一个从控制器)通信的典型连接方式。
SPI可工作于主模式或从模式。
SPICTL.2位---MASTER/SLA VE用来选择操作模式和SPICLK的源。
(1)主模式
将Master的数据传送给Slave,数据传送完毕,申请中断。
(2)从模式
将Slave的数据传送给Master,数据传送完毕,申请中断。
由图知,SPI有两种工作模式:主模式和从模式,操作模式由SPICTL.2(MASTER/SLA VE位)决定。数据的发送方式有三种:
(1)主控制器发送数据,从控制器发送伪数据;
(2)主控制器发送数据,从控制器发送数据;
主控制器控制SPICLK信号,通过发出SPICLK信号启动数据发送,从控制器则通过检测SPICLK信号接收数据。
一个主控制器可以连接多个从控制器,但是一次只允许一个从控制器给主控制器发送数据
10.3 串行外设接口中断
有五个控制位用于初始化串行外设接口的中断:
SPI中断使能位:SPI INT ENA (SPICTL.0);
SPI中断标志位:SPI INT FLAG(SPISTS.6);
SPI超限中断使能位:OVERRUN INT ENA(SPICTL.4);
SPI接收器超限中断标志位:RECEIVER OVERRUN FLAG(SPISTS.7)
SPI中断优先级选择位:SPI PRIORITY(SPIPRI.6)。
10.4 数据格式
SPI通信时,要发送的数据从SPIDA T寄存器的MSB依次移出,接收的数据则从SPIDAT的LSB依次移入。SPI数据字符位数(1-16位)由SPICCR.3-0指定。当写入SPIDA T或SPITXBUF时,数据必须是左对齐的。数据从SPIRXBUF读回时是右对齐的。
10.5 SPI波特率和时钟模式
SPI模块支持125种不同的波特率和4种不同的时钟模
式。SPI最大波特率为CLKOUT频率的四分之一。
10.5.1SPI波特率的确定
SPI波特率取决于CLKOUT和SPIBRR的值。
(1)对于SPIBRR=3-127
SPI波特率=CLKOUT/(SPIBRR+1)
(2) 对于SPIBRR=0-2
SPI波特率=CLKOUT/4
SPI最大波特率=CLKOUT/4=10MHz
10.5.2SPI时钟模式
SPI有四种时钟模式,由CLOCK POLARITY和CLOCK
PHASE位控制。
CLOCK POLARITY位:选择时钟的有效沿是上升沿还是下降沿;
CLOCK PHASE位:选择是否有半个时钟周期的延时。
(1)下降沿,无延时:SPI在时钟下降沿发送数据,在时钟的上升沿接收数据;
(2)下降沿,有延时:SPI在时钟下降沿前半个周期发送数据,在时钟的下降沿接收数据;
(3)上升沿,无延时:SPI在时钟上升沿发送数据,在下降沿接收数据;
(4)上升沿,有延时:SPI在时钟上升沿前半个周期发送数据,在上升沿接收数据。
4种时钟模式如图所示。
10.6 SPI的复位和初始化
系统复位使SPI引脚功能被选定为通用输入,要对SPI的配置,需做以下工作:
(1)设置SPI SW RESET位(SPICCR.7)的值为0,强制SPI复位;
(2)初始化SPI的配置、格式、波特率和引脚功能为期望值;
(3)设置SPI SW RESET位为1,从复位状态释放SPI;
(4)向SPIDAT或SPITXBUF写数据;
(5)数据发送完成后(SPISTS.6=1),读取SPIRXBUF以确定接收的数据。
SPI应用实例(控制串行D/A)
DAC714是美国BB公司生产的16位具有串行接口的数模转换器,电压输出型,输出范围是-10V+10V。
由控制时序图可知,SPI时钟模式应为下降沿,
无延时。即SPI在时钟下降沿发送数据,
在时钟的上升沿将数据锁存到DAC714。
8、简述TMS320CAN总线的特点。
CAN控制器模块
11.1 CAN总线技术概述
测控系统向着网络化方向发展。
CAN总线的出现,使控制系统的网络化成为可能,是国际公认的一种现场总线协议。CAN (Controller Area
数据通信协议。CAN总线问世以来,以高效率、低成本和快速性等特点迅速在汽车电子、测量仪器、控制系统得到广泛的应用。
CAN协议一般用来管理控制器、传感器、执行器和人机接口之间的数据传输。由于协议本身的优点,总线上的数据绝对不会发生冲突、数据遗失等现象,使得CAN广泛用于环境恶劣的工业现场和自动化生产线。CAN总线是一种多主总线,通信介质可以是绞线、同轴电缆或光导纤维。
CAN协议对于许多领域的分布式测控是很有吸引力的,目前CAN已成为IS011898标准,其特性如下:
(1)结构简单,只有两根线与外部相连,且内部含有错误探测和管理模块。(2)CAN是一种有效支持分布式控制和实时控制的串行通信网络。
(3)CAN可以多主模式工作,网络上任意一个节点均可在任意时刻主动地向网络上的其它节点发送信息,而不分主从,节点之间有优先级之分,因而通信方式灵活。
(4)CAN采用非破坏性位仲裁技术,优先级发送,可以大大节省总线冲突仲裁时间,在重负荷下表现出良好的性能。
(5)CAN可以点对点、一点对多点(成组)及全局广播等几种方式传送和接收数据。
(6)CAN的直接通信距离最远可达10km(传输速率为5Kbps);最高通信速率可达1Mbps(传输距离为40m)。
(7)CAN上的节点数实际可达110个。
(8)CAN数据链路层采用短帧结构,每一帧为8个字节,易于纠错。可满足通常工业领域中控制命令、工作状态及测试数据的一般要求,同时,8个字节不会占用总线时间过长,从而保证了通信的实时性。
(9)CAN每帧信息都有CRC校验及其它检错措施,有效地降低了数据的错误率。
(10)CAN节点在错误严重的情况下,具有自动关闭的功能,使总线上其它节点不受影响。
(11)信号调制解调方式采用NBZ(非归零)编码解码
方式,并且采用插入填充位(位填充)技术。
CAN协议支持用于通信的4种不同的帧类型:
?数据帧:从发送节点到接收节点传送数据。
?远程帧:主要用于请求信息,当节点A向节点B发送一个远程帧,如果节点B中的数据帧信息与节点A有相同的标识符,节点B将做出应答,并发送相应的数据帧到总线上。
?错误帧:在总线检测错误时,任意一个节点所发送的帧。
?过载帧:在前后两个数据帧或远程帧之间提供一个额外的延时。
CAN标准数据帧包含44到108位,而CAN扩展数据帧包含64到128位,另外,多达23个填充位可以插入到一个标准数据帧中,多达28个填充位可以插入到扩展数据帧中,这要根据数据流的代码来定。标准数据帧的最大长度为131位,扩展数据帧的最大长度为156位。
如图11-1所示,数据帧包含如下内容:
(1)帧的起始
(2)包含标志符和被发送信息类型的仲裁域
(3)包含数据位数的控制域
(5)循环冗余检查(CRC)位
(6)应答位
(7)帧结束位
CAN总线所具有的卓越性能、极高的可靠性,设计独特,特别适合工业设备测控单元相连。因此,备受工业界的重视,并已被公认为工业界最有前途的现场总线之一。
11.2 CAN模块介绍
LF240x为第一个具有片上CAN控制模块的DSP芯片,给用户设计分布式或网络化运动控制系统提供了方便。CAN控制器是一个16位的外设模块,具有以下特性:
(1)完全支持CAN2.0B协议。
(2)提供6个邮箱给对象,其数据长度为0-8个字节。
(3)针对邮箱0、1和2、3有局域接收屏蔽寄存器。
(4)可编程波特率。
(5)可编程中断配置。
(6)可编程的CAN总线唤醒功能。
(7)自动回复远程请求。
(8)当发送出现错误或仲裁丢失数据时能自动重发。
(9)总线错误诊断功能。
(10)自测试模式。
(11)两引脚通信,即CANTX和CANRX。
11.3 CAN控制器的结构和存储器映射(略)
11.4 CAN控制器应用(略)
11.4.1 CAN控制器的操作步骤CAN控制器的操作分成以下三大步
:1.初始化CAN控制器2.信息的发送3.信息的接收
11.4.2 CAN控制器扩展硬件接口CAN控制器扩展硬件接口如图11-4所示,DSP需要通过一个CAN收发器连接到CAN总线上。
TMS320的模数转换模块特点单排序模式下ADCO原理图
四题 论述题 30
1、结合下图说明TMS320F2407 看门狗工作原理。
2、简述TMS320F240x 芯片的性能特点(见下表)
3、简述流水线工作原理(以四级流水线为例,可画图加以表示)(内容见后面)
4、简述DSP 与单片机、嵌入式处理器的区别。(内容见后面)
看门狗(WD)定时器
用途:监视软件和硬件的运行,在CPU 混乱时(如软件死循环或跑飞),完成系统的复位,从而提高系统的可靠性。
12.1 看门狗定时器概述
结构框图见下页,所有寄存器都是8位宽度。具有如下特征: (1) 8位WD 计数器,上溢时产生一个系统复位信号。 (2) 6位的自行计数器,用于WD 预定标,共6种选择。
(3) 一个复位密钥(WDKEY)寄存器。当一个55h 值后紧随着一个AAh 值写入WDKEY 时,则WD 计数器清零,当不正确的值写入时,则产生一个复位信号。
(4) 3个WD 检验位。若WD 定时器失效,则启动系统复位。 (5) 一旦系统复位后,WD 定时器就自动启动。
12.2 WD操作
12.2.1 WD的时钟
WD的时钟WDCLK是一个低频时钟,由CPU的输出时钟CLKOUT提供。
WDCLK=CLKOUT/512
12.2.2 定时器的悬挂
因为WDCLK的时钟是由CLKOUT分频产生的,当CPU被挂起
时(即CPU进入HALT低功耗模式),WDCLK被停止
12. 3 WD控制寄存器
共有3个寄存器控制着WD的操作:
(1)WD计数寄存器(WDCNTR)—8个位为8位WD计数器的值,只读。
向WD复位关键字寄存器写入正确的序列会清除WDCNTR且可阻止系统复位,但并不会清除自行计数器。(2)WD复位关键字寄存器(WDKEY)—当写一个55h后紧
随写入一个AAh,则清除WDCNTR。任何的其他值都会引起系统复位。
位7-0:这些只写数据位为8位复位关键字值。
(3)WD定时器控制寄存器(WDCR) —本寄存器包含用于看门狗配置的如下控制位:
WD禁止位;WD标志位;WD检验位(3个);WD预定标选择位(3个)。
格式如下:
位7:WDFLAG,看门狗标志位。该位标识WD定时器是否产生了一个系统复位。
0:表明自上次清除该位后,WD定时器还没有产生复位。
1:表明自上次清除该位后,WD定时器已经产生了复位。
位6:WDDIS,看门狗禁止位。仅当SCSR2寄存器的WD OVERRIDE位为1时,该位才能被写。
0:看门狗被使能。
1:看门狗被禁止。
位5-位3:WDCHK2-WDCHK0,看门狗检验位(3个)。当向WDCR控制寄存器写时,这三位必须被写为101,否则产生系统复位。
位2-位0:WDPS2-WDPS0,看门狗预定标选择位。这些位决定了看门狗的溢出频率,如下页表所示。
2、简述TMS320F240x芯片的性能特点。
TMS320LF240X系列DSP概述
该系列包括:
闪存:TMS320LF2402、TMS320LF2406、TMS320LF2407 ROM: TMS320LC2402、TMS320LC2404、TMS320LC2406最具革命性产品:LF2407/ LF2407A,是当今世界上集成度最高、性能最强的运动控制DSP芯片。
1.1 DSP芯片的基本结构
DSP是一种特殊结构的微处理器, 快速实现各种数字信号处理算法。
2. DSP芯片的基本结构
(1) 冯.诺依曼结构。通用微处理器,存储器结构为冯.诺依曼结构。程序存储器和数据存储器共用一个公共的存储空间和单一的地址和数据总线。
(2)哈佛结构: DSP的程序存储器空间和数据存储器空间分开,即每个存储器空间独立编址,独立访问,并具有独立的程序总线和数据总线,取指和执行能完全重叠进行。
允许数据存放在程序存储器中,并被算术指令运算指令直接使用。
指令存储在高速缓冲器(Cache)中,当执行本指令时,不需再从存储器中读取指令,节省一个机器周期的时间。(2)流水线操作功能
DSP芯片采用多组总线结构,允许CPU同时进行指令和数据的访问。因而,可在内部实行流水线操作。
执行一条指令,总要经过取指、译码、取数、执行运算,需要若干个指令周期才能完成。流水线技术是将各个步骤重叠起来进行。既第一条指令取指、译码时,第二条指令取指;第一条指令取数时,第二条指令译码,第三条
指令取指,依次类推。
(3)专门的硬件乘法器和乘加指令MAC在数字信号处理的算法中,乘法和累加是基本的大量运算,占用绝大部分的处理时间。例如,数字滤波,卷积,相关,向量和矩阵运算中,有大量的乘和累加运算。。PC机计算乘法需多个周期用软件实现,而DSP设置了硬件乘法器以及乘加指令MAC,在单周期内取两个操作数一次完成。
(4)特殊的处理器指令
采用特殊的指令。例如:DMOV指令,把指令的数据复制到该地址加1的地址中,原单元的内容不变----数据移位,
相当于延迟。
另一特殊指令LTD,在一个指令周期完成LT、DMOV和APAC三条指令的内容。
(5) 高速的指令运行周期
DSP指令周期可为几ns,LF2407A为40ns 。
(6) 丰富的片内存储器件和灵活的寻址方式
片内集成FLASH和双口RAM,通过片内总线访问这些存储空间,因此不存在总线竞争和速度匹配问题,
大大提高数据的读/写速度。
(7) 独立的直接存储器访问(DMA)总线及其控制器
DSP为DMA单独设置了完全独立的总线和控制器。
(1)双10位(双8路或单16路)A/D转换器,转换时间500nS。
(2)41个可独立编程的多路复用I/O引脚;
(3)带锁相环PLL的时钟模块;
(4)看门狗定时器模块;
(6)两个事件管理器EV A、EVB,可为所有类型电机提供控制技术,在工业自动化方面的应用奠定了基础。* 3个具有死区功能的全比较单元;2个单比较单元;
* 防止击穿故障的可编程PWM死区控制;
* 2个16位通用定时器;
* 3个事件捕捉单元,其中2个具有直接连接光电编码器脉冲的能力;
(7)8个16位PWM通道--三相反相器控制;
(8)5个外部中断(两个驱动保护、复位、两个可屏蔽中断);
(9)CAN 2.0B 模块
(10)用于仿真的JTEG接口。
(11)片内存储器:32K字闪存、2.5K字RAM
(12)用于仿真的JTAG接口。
2.2.2 TMS320LF2407/2407A的引脚介绍
144条引脚,如图2.2。
图2.3所示功能结构与各功能模块相关的引脚。引脚及功能见表2.1(P15)
3、简述流水线工作原理(以四级流水线为例,可画图加以表示)(内容见后面)
4、简述DSP与单片机、嵌入式处理器的区别。(内容见后面)
参考答案:第1章数字信号处理器(DSP)综述
1.1 什么是DSP
DSP-Digital Signal Processor(数字信号处理器)
特别适合于实现各种数字信号处理运算的微处理器。过去受集成电路技术和数字化器件发展水平限制,只限于理论概念的讲授和仿真。
早期-在计算机上仿真,算法实现。
现在-在DSP上实时处理
DSP也可是Digital Signal Processnig(数字信号处理)的缩写,国内常用DSP代表数字信号处理器。
由于DSP具有:
(1)丰富的硬件资源(2)改进的并行结构、(3)高速的数据处理能力和功能强大的指令系统,
已成为世界半导体产业中紧随微处理器与微控制器(单片机)之后的又一个热点
在通信、航空、航天、机器人、工业自动化、自动控制、网络及家电广泛的应用。
1.2 DSP技术的发展及现状
但由于当时的计算机技术和数字电路技术发展水平的限制,FFT应用受到限制。
20世纪70年代,由于集成电路技术的发展,使用硬件实现FFT和数字滤波的算法成为可能。
1978年,AMI公司宣布第一个DSP问世,但人们一般认为,20世纪70年代后期推出的Intel 2920才是第一片具有独立结构的DSP。
1981年,美国德州仪器(TI)公司研制出了著名的TMS320系列的首片低成本、高性能的DSP-TMS320C10。使DSP技术向前跨出了意义重大的一步。
90年代后,由于超大规模集成电路、微处理器技术的发展,数字信号处理无论在理论上还是在工程应用中,都是发展最快的学科之一,且日趋完善和成熟。
特别是90年代中期,由于Internet网络的迅猛发展和高清晰度数字电视的研究以及各种网络通信、多媒体技术的普及和应用,极大地刺激了数字信号处理理论、DSP技术在工程上的实现和推广应用。DSP的性能指标不断提高,价格不断下降,获得广泛应用,已成为新兴科技:通信、多媒体系统、消费电子、医用电子等飞速发展的主要推动力。
DSP的发展经历了三个主要阶段,目前已发展到第四代、第五代产品。
DSP主要厂商:美国TI、ADI、Motorola、Zilog等公司。TI公司位居榜首,占全球DSP市场约60%左右。
尽管当前的DSP技术已达到较高的水平,但在一些实时性要求很高的场合,单片DSP的处理能力还是不能满足要求。因此,多总线、多流水线和多处理器并行就成为提高系统性能的重要途径之一。许多公司在提高单片性能的同时,在结构上为多处理器的并行应用提供方便。
例如,TI公司的某型号DSP,设置了6个8bit的通信口,既可作级联,也可作并行连接。每个口都有DMA能力。
AD公司的SHARC系列DSP为满足多片互联的需要,专门设置有LINK链路口,可无缝连接多达6片DSP,组成一定的拓扑结构的网络,这些都是专门为多处理器应用而设计的。
提高性能的另一种方法就是把DSP内核集成在一个芯片内。如TI公司1995年推出的TMS320C80(又称多媒体视频处理器)内有5个强有力、完全可编程的DSP处理器
随着DSP的处理速度越来越快,功耗也随越大,特别是在电池供电的便携式及嵌入式小型或微型设备中的大量使用,都迫切要求DSP在提高工作性能的同时,降低工作电压,减少功耗。为此,各DSP厂家积极研制并陆续推出多种低电压、低功耗芯片。
例如,TI公司的TMS320VC5416,内核工作电压只有1.5V,有的DSP设置了多种节能等待状态。
总之,低电压和低功耗已成为DSP的重要技术指标之一。
系统芯片集成-Soc(System on Chip) 技术,是下一代DSP产品的主要发展方向之一。
芯片技术能降低电子产品成本和体积,当代电子学革命之父、2000年诺贝尔物理奖获得者、美国TI公司杰克-基尔比也没有想到,他在1959年发明的芯片技术,会将电子产品的成本降低到了百万分之一的地步,体积缩小到令人难以置信的程度。
例如,具有电视质量的无线电会议、家庭娱乐设施、电子游戏等。
最近,可将8个DSP核(每个核有1亿个晶体管)集成到拇指大的一块芯片上。
2010年,可将12个DSP核(每个核有5亿个晶体管)集成到一块芯片,即笔记本电脑集成到手表大小。
在DSP芯片向着高性能、高速、低功耗方向发展的同时,数字信号处理理论也在不断地发展。
(1)自适应滤波、卡尔曼滤波、同态滤波等理论逐步成熟和应用,以及各种快速算法。
(2)声音与图像的压缩编码、识别与鉴别。
(3)加密解密,调制解调,信道辨别与均衡,智能天线,频谱分析等算法。
都成为研究的热点,并有长足的进步,为各种实时处理的应用,提供了算法基础。
(1)全球信息化和Internet网的普及
(2)多媒体技术的广泛应用,尖端技术向民用领域迅速的转移。
(3)数字技术大范围进入消费类电子产品等。
使DSP不断更新换代,价格大幅度下降,各种开发工具日臻完善,DSP已成为最有发展和应用前景的电子器件之一。
据国际著名市场调查研究公司Forward Concepts 发布的一份统计和预测报告显示,目前世界DSP产品市场每年正以30%的增幅大幅度增长,其增长速度比半导体工业快50倍。
1.3 DSP的应用
自从20世纪70年代末诞生以来,已被广泛地应用在各个领域。当今的DSP应用市场上,通信设备和网络、多媒体技术等是最大的用户。从DSP的一个最典型的应用-手机,就可见DSP的应用市场之大。
主要应用:
(1)数字信号处理运算:快速傅立叶变换(FFT),卷积,数字滤波,自适应滤波,相关,模式匹配,加密等。(2)通信:调制解调器,自适应均衡,数据加密,数据压缩,扩频通信,纠错编码,传真,可视电话等。
(3)网络控制及传输设备:网络功能和性能的不断提高,如视频信箱、交互式电视等,要求更宽、更灵活的传输带宽,实时传输和处理数据的网络控制器、网络服务器和网关都需要DSP的支持。
(4)语音处理:语音编码,语音合成,语音识别,语音邮件,语音存储等。
(5)电机和机器人控制:在单片内集成多个DSP处理器,可采用先进的神经网络和模糊逻辑控制等人工智能算法。机器人智能的视觉、听觉和四肢的灵活运动必须有DSP技术支持。
(6)激光打印机、扫描仪和复印机:DSP不仅仅是控制,还有繁重的数字信号处理任务,如字符识别、图像增强、色彩调整等。
(7)自动测试诊断设备及智能仪器仪表、虚拟仪器:现代电子系统设备中,有近60%的设备及资金是用于测试设备,自动测试设备集高速数据采集、传输、存储、实时处理于一体,是DSP又一广阔应用领域。
(8)图像处理:二维、三维图形处理,图像压缩、传输与增强,动画,机器人视觉,模式识别等。
(9)军事:保密通信,雷达处理,导航,导弹制导。
如机载空-空导弹,内装有红外探测仪和相应的DSP处理部分,完成目标的自动锁定与跟踪,战斗机上的目视瞄准器和步兵头盔式微光仪,需要DSP完成图像滤波与增强,智能化目标的搜索、捕获。
(10)自动控制:机器人控制,磁盘控制,自动驾驶,声控,发动机控制等。
(11)医疗仪器:助听,诊断工具,超声仪,CT,核磁共振。
(12)家用电器:数字电话,数字电视,音乐合成,音调控制,玩具与游戏,高保真音响,数字收音机、数字电视等。
(13)汽车:防滑刹车,引擎控制,伺服控制,振动分析,安全气囊的控制器,视像地图等。一辆现代的高级轿车上,有30多处电子控制设备上用到了DSP技术。
(14)多媒体个人数字化产品:数码相机,MP3,掌上电脑,电子辞典,数码录音笔,数码复读机等。
1.4 DSP与单片机、嵌入式微处理器的区别
DSP 、单片机以及嵌入式微处理器都是嵌入式家族的一员。
最大区别是DSP能够高速、实时地进行数字信号处理运算。数字信号处理运算的特点是乘/加及反复相乘求和(乘积累加)。为了能快速地进行数字信号处理的运算,
(1)DSP设置了硬件乘法/累加器,
(2)能在单个指令周期内完成乘/加运算。
(3)为满足FFT、卷积等数字信号处理的特殊要求,目前DSP大多在指令系统中设置了“循环寻址”及“位倒序”寻址指令和其他特殊指令,使得寻址、排序的速度大大提高。DSP完成1024复点FFT的运算,所需时间仅
高速数据的传输能力是DSP高速实时处理的关键之一。新型的DSP设置了单独的DMA总线及其控制器,在不影响或基本不影响DSP处理速度的情况下,作并行的数据传送,传送速率可达每秒百兆字节。DSP内部有流水线,它在指令并行、功能单元并行、多总线、时钟频率提高等方面不断创新和改进。
因此,DSP与单片机、嵌入式微处理器相比,在内部功能单元并行、多DSP核并行、速度快、功耗小、完成各种DSP算法方面尤为突出。
单片机也称微控制器或嵌入式控制器,它是为中、低成本控制领域而设计和开发的。单片机的位控能力强,I/O 接口种类繁多,片内外设和控制功能丰富、价格低、使用方便,但与DSP相比,处理速度较慢。DSP具有的高速并行结构及指令、多总线,单片机却没有。DSP处理的算法的复杂度和大的数据处理流量更是单片机不可企及的。
嵌入式微处理器的基础是通用计算机中的CPU(微处理器)。是嵌入式系统的核心。为满足嵌入式应用的特殊要求,嵌入式微处理器虽然在功能上和标准微处理器基本是一样的,但在工作温度、抗电磁干扰、可靠性等方面一般都做了各种增强。与工业控制计算机相比,嵌入式微处理器具有体积小、质量轻、成本低、可靠性高的优点,但是在电路板上必须包括ROM、RAM、总线接口、各种外设等器件,从而降低了系统的可靠性,技术保密性也较差。
在应用设计中,嵌入式微处理器及其存储器、总线、外设等安装在专门设计的一块电路板上,只保留和嵌入式应用有关的母板功能,可大幅度减小系统的体积和功耗。目前,较流行的是基于ARM7、ARM9系列内核的嵌入式微处理器。
嵌入式微处理器与DSP的一个很大区别,就是嵌入式处理器的地址线要比DSP的数目多,所能扩展的存储器空间要比DSP的存储器空间大的多,所以可配置实时多任务操作系统(RTOS)。
RTOS是针对不同处理器优化设计的高效率、可靠性和可信性很高的实时多任务内核,它将CPU时间、中断、I/O、定时器等资源都包装起来,留给用户一个标准的应用程序接口(API),并根据各个任务的优先级,合理地在不同任务之间分配CPU时间。RTOS是嵌入式应用软件的基础和开发平台。
常用的RTOS:Linux(为几百KB)和VxWorks(几MB)uC/US。
体系结构对特殊类型的数据结构只能提供通用的寻址操作,而DSP则有专门的简捷寻址机构和辅助硬件来快速完成。所以嵌入式微处理器不适合高速、实时的数字信号处理运算。而更适合“嵌入”到系统中,完成高速的“通用”计算与复杂的控制用途。
DSP、单片机以及嵌入式微处理器三者各有所长,技术的发展使得DSP、单片机、嵌入式微处理器相互借鉴对方的优点,互相取长补短。
现在,部分单片机内部都有硬件乘法器,单片机内部
也有了DSP内部才有的流水线作业(但规模小些)
借鉴PC机的优点,DSP内部也有了一定规模的高速缓存。吸收Intel的嵌入式系统芯片和系统软件的优点。
有的DSP内部集成了高速运行的DSP内核及控制功能丰富的嵌入式处理器内核。
例如,内部集成有TI公司的C54xCPU内核和ARM公司的ARM7TDMIE内核的DSP,既具有高速的数据处理能力,又有各种类型的外设接口和位控能力,大大拓宽了DSP在控制领域的应用范围。
DSP在注重高速的同时,也在发展低价位控制芯片。
美国Cygnal公司的C8051F020 8位单片机,内部采用流水线结构,大部分指令的完成时间为1或2个时钟周期,峰值处理能力为25MIPS。片上集成有8通道A/D、2路D/A、两路电压比较器,内置温度传感器、定时器、可编程数字交叉开关和64个通用I/O口、电源监测、看门狗、多种类型的串行总线(两个UART、SPI)等。
单片机课程设计 2014年 6月 15日 课 程 单片机课程设计 题 目 花样流水灯 院 系 电气工程及其自动化系 专业班级 1112班 学生姓名 温亿锋 学生学号 7 指导教师 张瑛
一丶任务 设计一款以AT89C51单片机作为主控核心,按键控制电路、流水灯显示电路以及单片机最小系统等模块组成的核心主控制电路。 二丶设计要求 通过发光二极管显示不同的花样(至少有六种花样),并且可以通过按键来控制流水灯的速度。 三丶设计方案 本方案主要是通过对基于单片机的多控制、多闪烁方式的LED流水灯循环系统的设计,来达到本设计的要求。其硬件构成框图如下图所示,以单片机为核心控制,由单片机最小系统(时钟电路、复位电路、电源)、按键控制电路、LED 发光二极管和5V直流电源组成。 单片机流水灯循环控制系统硬件框图 此设计方案中单片机的P1口接5路按键控制电路,实现流水灯花型的切换功能;单片机的P3.7引脚接上一个按钮开关以实现对流水灯闪烁频率的控制,即实现了快慢两种节拍实现花型的变换;单片机上的P2口接八路LED发光二极管组成流水灯电路,显示流水灯循环情况。 四丶系统硬件设计 4.1 直流稳压电源电路
对于一个完整的电子设计来讲,首要问题就是为整个系统提供电源供电模块,电源电路的稳定可靠是系统平稳运行的前提和基础。电子设备除用电池供电外,还采用市电(交流电网)供电。通过变压、整流、滤波和稳压后,得到稳定的直流电。直流稳压电源是电子设备的重要组成部分。本项目直流稳压电源为+5V。 直流稳压电源的制作一般有3种制作形式,分别是分立元件构成的稳压电源、线性集成稳压电源和开关稳压电源。下图为稳压电源采用的是三端集成稳压器7805构成的正5V直流电源。 三端固定式集成稳压电源电路图 AT89C51单片机的工作电压范围:4.0V---5.5V,所以通常给单片机外接5V 直流电源。此处用3节1.5V的干电池供电。 4.2 单片机最小系统 要使单片机工作起来,最基本的电路的构成由单片机、时钟电路、复位电路等组成,单片机最小系统如图所示。 时钟电路:本系统采用单片机内部方式产生时钟信号,用于外接一个12MHz 石英晶体振荡器和2个30pF微调电容,构成稳定的的自激振荡器,其发出的脉冲直接送入内部的时钟电路。 复位电路:确定单片机工作的起始状态,完成单片机的启动过程。单片机系统的复位方式有上电自动复位和手动按键复位。本设计采用手动按键复位,该复位方式同样具有上电自动复位功能。
作为一个电子技术爱好者,先就做一个最简单的心形流水灯玩玩吧。 本教程主要特点就是简单,不要你懂原理,不要你懂编程,只要最基本的元件和材料就可以完成。 首先我们来准备和认识元件。 1、最大的一个部件,洞洞板也叫万能板,9*15cm的刚刚好。便宜的万能板1元一块,你也可以用双面喷锡的质量好的玻纤板,4元一块。 2、主角单片机。要求用40脚的,刚好驱动32个led。建议用STC89C52RC,最常见便宜而且不用复位电路。 3、led,5mm的颜色随你喜欢,32个,注意长脚为正极。我用的是白发蓝,你也可以用不同的颜色组合各种效果。 4、电阻,限制led的工作电流,这个严格讲要经过计算,咱们随便作就不管了,200欧姆到1K欧姆的都可以,只是led的亮度有点区别。贴片电阻和直插的都可以,建议用贴片美观,熟练了焊起来更快,只要稍加练习就可以,实在没信心直插的也可以,反正在背面也没用什么影响。 5、镊子,焊接贴片电阻要用到。 6、晶振和瓷片电容。 晶振采用12MHz的,电容15pF-33pF都可以。 7、导线几根,连接电源和飞线用,当然飞线越少越好,一是美观,二是飞线容易出问题。 8、焊接工具。烙铁、焊锡、烙铁架、海绵、斜口钳等等,大家自己有啥样就用什么。我的是坏烙铁拼凑的白菜白光,看着烂用着还可以。 9、还有最好用IC座,一是保护单片机二是方便拆卸和烧录。第一个是固定式IC座,元,第二个是活体的,用的更方便,4元一个。 10、电源部分。这里可以废物利用,用废弃的手机电池,在正负极接上导线,安装XH插头,插座焊在洞洞板上。不必在意电压,只是点亮led,手机电池标准电压,充满这里用没问题。可以加一个拨动开关控制电源。 接下来开始焊接,注意元件的位置和极性。 先焊最小系统,ic座,晶振、电容这些,然后是led,注意正极(长脚)朝外,负极(断脚)朝向单片机。接着是led的负极用锡接过线接到单片机的io口,注意中间接电阻。最后连
基于单片机的LED流水灯设计 设计任务 1掌握MCS-51系列8051、8255的最小电路及外围扩展电路的设计方法 2了解单片机数据转换功能及工作过程 3设计LED流水灯系统,实现8个LED霓虹灯的左、右循环显示4完成主要功能模块的硬件电路设计 5用proteus软件完成原理电路图的绘制 一设计方法 本课题使用AT89C51单片机时无须外扩存储器。因此,本流水灯实际上就是一个带有八个发光二极管的单片机最小应用系统,即为由发光二极管、晶振、复位、电源等电路和必要的软件组成的单个单片机。如果要让接在P1.0口的LED1亮起来,那么只要把P1.0口的电平变为低电平就可以了;相反,如果要接在P1.0口的LED1熄灭,就要把P1.0口的电平变为高电平;同理,接在P1.1~P1.7口的其他7个LED 的点亮和熄灭的方法同LED1。因此,要实现流水灯功能,我们只要将发光二极管LED1~LED8依次点亮、熄灭,8只LED灯便会一亮一暗的做流水灯了。由于人眼的视觉暂留效应以及单片机执行每条指令的时间很短,我们在控制二极管亮灭的时候应该延时一段时间,否则我们就看不到
“流水”效果了。 二方案论证与比较 2.1循环移位法 在上个程序中我们是逐个控制P1端口的每个位来实现的,因此程序显得有点复杂,下面我们利用循环移位指令,采用循环程序结构进行编程。我们在程序一开始就给P1口送一个数,这个数本身就让P1.0先低,其他位为高,然后延时一段时间,再让这个数据向高位移动,然后再输出至P1口,这样就实现“流水”效果啦。由于8051系列单片机的指令中只有对累加器ACC中数据左移或右移的指令,因此实际编程中我们应把需移动的数据先放到ACC中,让其移动,然后将ACC移动后的数据再转送到P1口,这样同样可以实现“流水”效果。具体编程如下所示,程序结构确实简单了很多。 2.2查表法 上面的两个程序都是比较简单的流水灯程序,“流水”花样只能实现单一的“从左到右”流方式。运用查表法所编写的流水灯程序,能够实现任意方式流水,而且流水花样无限,只要更改流水花样数据表的流水数据就可以随意添加或改变流水花样,真正实现随心所欲的流水灯效果。我们首先把要显示流水花样的数据建在一个以TAB为标号的数据表中,然后通过查表指令“MOVC A,@A+DPTR”把数据取到累加器A中,然后再送到P1口进行显示。具体源程序如下,TAB标号处的数据表可以根据实
课程设计(论文)说明书 题目:心形流水灯 院(系):信息与通信学院 专业:通信工程 学生姓名: 学号: 指导教师: 职称:讲师 2012年12 月1日
摘要 本论文基于单片机技术与单片机芯片AT89S51芯片功能和C语言程序,实现心形流水灯的多种亮与灭的循环。首先,我们了解单片机的一些技术,了解了单片机芯片AT89S51的一些功能;然后结合C语言编程;最后将它们运用到实际的电路,使心形LED灯实现多种亮灭方法。本论文介绍关于流水灯的运用和单片机技术;然后介绍芯片AT89S51;最后介绍运用到的相关软件.矚慫润厲钐瘗睞枥庑赖。 关键词:单片机;流水灯;C语言;
Abstract This paper Based on the single chip microcomputer and single chip microcomputer chip AT89S51 chip function and C language program,Realization of flowing water light heart a variety of light and the cycle of destruction。primarily,We know some of the single chip microcomputer technology,Understanding of the single chip microcomputer chip AT89S51 of some functions, Then based on the C language programming; Finally they are applied to the practical circuit, Make heart LED lamp achieve a variety of light out method. This paper introduces about the use of flowing water light and single chip microcomputer; and then introduced chip AT89S51; At the end of this paper applied to software.聞創沟燴鐺險爱氇谴净。Key words:micro-computer;light water ;C programming language残骛楼諍锩瀨濟溆塹籟。
新能源与动力工程学院课程设计报告 单片机系统课程设计 专业: 班级: 姓名: 学号: 指导教师: 2014年7 月
新能源与动力工程学院课程设计任务书课程名称:单片机系统课程设计指导教师(签名): 班级:姓名:学号:
指导教师评语及成绩评定表 指导教师签字: 年月日
目录 绪论 ....................................................................................................................... - 1 -1 引言 ....................................................................................................................... - 1 - 1.1设计任务 .................................................................................................... - 2 - 1.2设计意义 .................................................................................................... - 2 - 1.3设计思路 .................................................................................................... - 2 - 1.4设计目的 .................................................................................................... - 2 - 2 总体设计 ............................................................................................................... - 3 - 2.1系统框图 .................................................................................................... - 3 -3设计步骤 ................................................................................................................ - 3 - 3.1 STC89C52简介 ......................................................................................... - 3 - 3.2硬件设计 .................................................................................................... - 5 - 3.3单片机时钟电路 ........................................................................................ - 5 - 3.4复位电路 .................................................................................................... - 5 - 3.5工作电路 .................................................................................................... - 6 - 4 软件设计 ............................................................................................................... - 6 - 4.1设计要求 .................................................................................................... - 6 - 4.2软件的流程图 ............................................................................................ - 7 - 4.3程序代码 .................................................................................................... - 7 - 5 软件调试 ............................................................................................................... - 9 - 6 总结 ....................................................................................................................... - 9 - 7 心得体会 ............................................................................................................... - 9 -参考文献 ................................................................................................................. - 10 -附录1 元件清单 .................................................................................................... - 11 -
井冈山大学 机电工程学院 单片机 课程设计报告 课程名称:单片机 设计题目:心形流水灯 姓名:彭玉红 专业:生物医学工程 班级:11级医工本一班 学号:110615017 指导教师:王佑湖 2013年11月27日
目录 1引言 (2) 1.1设计任务 (2) 1.2设计要求……………………………………………… ..2 2 课题综述 (2) 2.1课题的来源 (2) 2.2面对的问题 (2) 3 系统分析 (2) 3.1 STC89C52单片机引脚图及引脚功能介绍 (2) 4 系统设计 (4) 4.1硬件设计 (4) 4.1.1硬件框图 (4) 4.1.2硬件详细设计 (5) 4.2 软件设计 (5) 4.3 硬件原理图 (6) 4.4 元件清单 (6) 4.5 硬件焊接图 (6) 4.6 代码编写 (7) 5心得体会 (7) 6致谢 (8) 参考文献 (8)
1 引言 单片机课程设计主要是为了让我们增进对STC89C51单片机电路的感性认识,加深对理论方面的理解。了解软硬件的有关知识,并掌握软硬件设计过程、方法及实现,为以后设计和实现应用系统打下良好基础。另外,通过简单课题的设计练习,使我们了解必须提交的各项工程文件,达到巩固、充实和综合运用所学知识解决实际问题的目的。 1.1设计任务 设计一个单片机控制的流水灯系统 1.2设计要求 (1)32个LED灯; (2)可实现多种的亮灯(如左循环,右循环,间隔闪,90度交叉闪等)。 2 课题综述 2.1 课题的来源 当今社会,这种由单片机芯片控制各种硬件工作的技术也日益成熟,并普及在交通、化工、机械等各个领域。而流水灯这项技术在生活中的应用更是广泛,较为贴近生活。而流水灯控制的设计所需要的知识也正好吻合了我们本学期对于单片机这门课程的学习,所以设计流水灯控制的这个课题让我们对知识的学习和巩固都有了进一步的加深。 2.2 面对的问题 这次课程设计是通过STC89C52位单片机实现。但面对的问题却
单片机流水灯实验报告 一、实验目的 1、熟练掌握AT89S52-Ⅰ型开发板的使用方法和注意事项。 2、了解简单单片机应用系统的设计方法。 3、掌握应用KEIL软件编辑、编译源汇编程序的操作方法。 4、掌握应用USBISP烧录软件的操作方法。 5、帮助学生养成良好实验习惯。 二、实验内容 在AT89S52-Ⅰ开发板上实现8个发光LED“流水”的现象,并通过编写程序控制流水现象。 三、实验说明 当8255 的PA口有低电平输出时,相应的发光二极管就会点亮。应用这一原理我们可以容易的点亮一个数码管,例如令PA口输出0111 1111时D1就会点亮。若再把0111 1111向右循环一位,利用PA口输出,就会点亮D2。在发光二极管两次点亮的间隔中加延时程序,让每次点亮停留一段时间,像这样人眼就可以看到“流水”的现象。 五、实验原理图 六、实验参考程序 #include
#define uint unsigned int uchar table[]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80}; sbit P00=P0^0; sbit P01=P0^1; void delay(uchar t) { uchar i,j; for(i=0;i 摘要 本设计着重在于分析计算器软件和开发过程中的环节和步骤,并从实践经验出发对计算器设计做了详细的分析和研究。本系统就是充分利用了G2452芯片的I/O引脚。系统以采用MSP430系列单片机G2452为中心器件来设计花样LED流水灯系统,通过按键实现8个LED灯不同花样式的闪烁。 关键词:流水灯;单片机;按键;闪烁 目录 1 项目要求 (3) 2 项目分析和系统设计 (3) 3 硬件设计 (3) 3.1单片机选型模块 (3) 3.2 LED流水灯模块 (4) 3.3功能模式选择模块 (5) 4 软件设计 (6) 4.1主程序 (6) 4.2子程序 (7) 5 系统调试 (8) 5.1硬件调试 (8) 5.2程序调试 (8) 5.3联合调试 (9) 6 外延 (11) 7 项目演练 (14) 8项目总结 (14) 附录1电路设计原理图(参考) (15) 附录2 PCB设计原理图(参考) (15) 附录3 关键程序(参考) (16) 基于单片机的流水灯系统设计与实现 1 项目要求 本项目花样流水灯采用MSP430单片机为控制器件,用于各方面的装饰,此花样流水灯有8个LED灯,六种花样灯光效果。 (1)初始化后,执行8个LED灯从右至左逐次点亮,每隔0.2s亮一个LED 灯,直到8个LED灯全亮,再从左至右依次熄灭直到全灭,以此循环; (2)当按下按键后,执行8个LED灯从右至左每隔0.2s逐一亮灭,直到点亮最左边一个灯后再从左至右每隔0.2s逐一亮灭,以此循环; 2 项目分析和系统设计 本系统分为硬件和软件模块。硬件上我们打算在单片机的不同的i/o中装上一个流水灯来进行对流水灯进行控制。 在程序方面,首先对msp430的i/o口进行的定义和设置,然后在去定义了一个delay进行延时功能,在用一个switch循环来使得流水灯不断的循环亮灭。 花样流水灯采用MSP430单片机为控制器件,用于各方面的装饰,此花样流水灯有8个LED灯,两种花样灯光效果。 3 硬件设计 本系统采用MSP430单片机为控制核心进行设计,该流水灯系统共可分为两个模块:单片机选型模块和LED流水灯模块。 Power MCU MSP430G2553 LED 花样流水灯 图1 系统框图 3.1单片机选型模块 MSP430单片机是16位的单片机,采用了精简指令集(RISC)结构,只有简洁的27条内核指令,大量的指令则是模拟指令;众多的寄存器以及片内数据存储器都可参加多种运算。这些内核指令均为单周期指令,功能强,运行的速度快。 旋转Led时钟 目录 实物图片 设计目的 供电方案 原件清单 编程 原理图 复位方法 使用说明 设计目的 (1)加强对单片机和汇编语言的认识,充分掌握和理解设计各部分的工作原理、设计过程、选择芯片器件、模块化编程等多项知识。 (2)用单片机模拟实现具体应用,使个人设计能够真正使用。 (3)把理论知识与实践相结合,充分发挥个人能力,并在实践中锻炼。 (4)提高利用已学知识分析和解决问题的能力。 (5)提高实践动手能力。 .电源提供方案 为使模块稳定工作,须有可靠电源,采用单片机控制模块提供电源。此方案的优点是系统简明扼要,节约成本;缺点是输出功率不高。 原件清单 Comment Designator Quantit y B 1 7291 3.3V贴片纽扣电池 座 1220纽扣电池 B 1 10p瓷片电容C1, C2 2 1331 3mm蓝色LED D1, D2, D3, D4, D5, D6, D7, D8, D9, D10, D11, D12, 52 1193 D13, D14, D15, D16, D17, D18, D19, D20, D21, D22, D23, D24, D25, D26, D27, D28, D29, D30, D31, D32, D33, D34, D35, D36, D37, D38, D39, D40, D41, D42, D43, D44, D45, D46, D47, D48, D49, D50, D51, D52, D53, D54, D55, D56, D57, D58, D59, D60 3mm红色LED 12,5,10,15,20,25,30,35,40,45,50,55,60 14 1179 蜂鸣器 F 1 1647 光敏电阻GM 1 1119 USB电源接口P1 1 9012三极管Q1 1 262 330R插件电阻R1, R2, R3, R4, R5, R6, R7, R8,R11 9 10K插件电阻R9, R10 3 热敏电阻RM 1 1497 SW-PB S1, S2 2 K003 4位数码管sm 1 6939 STC15w408as U1 1 DS1302 U2 1 A2104 晶振32.768Khz Y2 1 28P芯片座U1 1 8P芯片座U2 1 PCB 1 流水灯设计与总结报告 摘要:近年来,随着电子技术和微型计算机的发展呢,单片机的档次不断提高应用领域也不断扩大,已在工业控制、尖 端科学、智能仪器仪表、日用家电汽车电子系统、 办公自动化设备、个人信息终端及通信产品中得到广泛 的应用,成为现代电子系统中最重要的智能化的核心部件。关键字:单片机,流水灯 需求分析: 随着现代社会的发展,人们越来越追求审美和新颖,而流失灯就是其中一种,以前简单的照明工具变得越来越多样化,流水灯的千姿百态给人一种视觉冲动,现在不管大街小巷我们都可以随处可见这种变幻万千的流水灯,而这种流水灯我们可以产用子电路去设计,我们可以用控制器和状态译码器来实现灯光的流水效果,但是现在我们可以用单片机AT89C51来实现,因为其相对于电子电路有明显的优越性,控制硬件电路比较简单,软件方面也不复杂,而且功能作用并不低于电子电路设计的。由于它的小巧方便,我们采用单片机来做流水灯。 设计系统 1.复位电路部分 为确保微机系统中电路稳定可靠工作,复位电路是必不可少的一部分。单片机在启动时都需要复位,以使CPU及系统各部件处于确定的初始状态,并从初态开始工作。89系列单片机的复位信号是从RST引脚输入到芯片内的施密特触发器中的。当系统处于正常工作状态时,且振荡器稳定后,如果RST引脚上有一个高电平并维持2个机器周期(24个振荡周期)以上,则CPU就可以响应并将系统复位。单片机系统的复位方式有:手动按钮复位和上电复位。手动按钮不仅具有上电复位的功能,还可以通过按按键的方法实现复位,(如上图所示按S22)此时电源VCC经两个电阻分压,在RST端产生一个复位高电平。 2.时钟电路部分 时钟电路为单片机工作提供基本时钟,它是计算机工作的心脏,它控制着计算机的工作节奏。时钟电路一般由晶体震荡器和电容组成。 设计成绩 《电子设计大赛培训》 素质拓展设计报告 题目基于单片机的流水灯的设计与制作 姓名 学号 专业年级 12级通信工程3班 指导教师张学斌 2015年 06 月 25 日 摘要 (3) 一.单片机课程设计的目的和意义 (2) 二.设计任务与总体设计思路 (2) 2.1 设计要求 (2) 三.硬件电路设计 (4) 3.1 AT89C52RC简介 (3) 3.2 硬件电路图......................................... 错误!未定义书签。四.软件设计 (8) 五.收获与展望 (13) 参考文献 (13) 单片机的应用已经广泛的渗透到国民经济的各个领域,随着在电子领域尤其是自动化智能控制领域,传统的分立元件或数字逻辑电路构成的控制系统正以前所未有的速度被单片机智能控制系统所取代,它已经成为工科大学生的必修课程之一。本设计用单片机8951结合LED制作了一种新型的LED流水灯控制系统的设计,以AT89C51作为主控核心,利用软件实现对LED流水灯进行控制。本系统具有体积小、硬件少、电路结构简单及容易操作等优点。 本文设计的是基于单片机89C51的流水灯设计 关键词:LED AT89C51单片机控制系统流水灯 一.单片机课程设计的目的和意义 单片机是一种集成在电路芯片,是采用超大规模集成电路技术把具有数据处理能力的中央处理器CPU随机存储器RAM、只读存储器ROM、多种I/O口和中断系统、定时器/计时器等功能(可能还包括显示驱动电路、脉宽调制电路、模拟多路转换器、A/D转换器等电路)集成到一块硅片上构成的一个小而完善的计算机系统。 采用单片机可以完成很多功能,现在很多电子产品都要用到单片机。 二.计任务与总体设计思路 2.1 设计要求 (1)制作一个基于单片机控制的普通的流水灯(8盏),电路接通电源后流水灯正常跑动(如每次亮2盏); (2)可以实现流水灯的四个特殊功能(通过按键按钮实现功能间的切换)。 (a)实现亮灯数目的增加; 51单片机流水灯试验 一、实验目的 1.了解51单片机的引脚结构。 2.根据所学汇编语言编写代码实现LED灯的流水功能。 3.利用开发板下载hex文件后验证功能。 二、实验器材 个人电脑,80c51单片机,开发板 三、实验原理 单片机流水的实质是单片机各引脚在规定的时间逐个上电,使LED灯能逐个亮起来但过了该引脚通电的时间后便灭灯的过程,实验中使用了单片机的P2端口,对8个LED灯进行控制,要实现逐个亮灯即将P2的各端口逐一置零,中间使用时间间隔隔开各灯的亮灭。使用rl或rr a实现位的转换。 A寄存器的位经过rr a之后转换如下所示: 然后将A寄存器转换一次便送给P2即MOV P2,A便将转换后的数送到了P2口,不断循环下去,便实现了逐位置一操作。 四、实验电路图 五、通过仿真实验正确性 代码如下:ORG 0 MOV A,#00000001B LOOP:MOV P2,A RL A ACALL DELAY SJMP LOOP DELAY:MOV R1,#255 DEL2:MOV R2,#250 DEL1:DJNZ R2,DEL1 DJNZ R1,DEL2 RET End 实验结果: 六、实验参考程序 #include sbit P00=P0^0; sbit P01=P0^1; void delay(uchar t) { uchar i,j; for(i=0;i 一、原理图设计的目的: 利用AT89C51,通过控制按键来实现六种流水灯花样的转换,实现花样流水灯的设计,同时通过外部中断0,来控制流水灯的速度。 二、各器件的功能作用: 1、AT89C51 AT89C51有40个引脚,每个引脚都有其功能。本次设计中,利用P0口当输出口,输出低电平来驱动发光二极管点亮。利用P1.0~P1.5六个引脚,通过按键接地,然后采用扫描的方式,判断哪个引脚所接按键按下,从而来控制六种流水灯的花样。利用P3.2引脚外接按键接地,通过控制按键来减慢流水灯的速度,利用P3.3引脚外接按键接地,通过控制按键来提高流水灯的速度。利用P3.7输出低电平,导通三极管Q1,从而给八个发光二极管的阳极加高电平,一旦P0口输出低电平就可以驱动发光二极管。 2、八个发光二极管: 通过八个发光二极管来实现流水灯的变化,用低电平驱动发光二级管亮,同时,用高电平使其熄灭 。 3、按键 通过P1.0-P1.5外接的按键来实现流水灯各种花样的变化,当按键按下时,驱动一种流水灯花样的闪烁。同时,利用按键来提供外部中断,当按下按键时,产生一个外部中断,向CPU申请中断,CPU 响应其中断,因此可以用按键来实现提高流水灯闪烁的速度。 通过在RST口处加上一个按钮手动复位电路,利用复位按钮可以使运行中的流水灯复位到初始的状态。 4、排阻 因为P0口作为输出口时需要外接上拉电阻 三、设计原理图: 四、程序如下: #include #include P1=0x00,P2=0x00; P3=0xff,P0=0xff; delay(500); P1=0xff,P2=0xff,P3=0x00,P0=0x00; delay(500); } //四个点的流水 while(j>0) { temp0=0xfe,temp1=0x7f; P1=P3=temp0,P2=P0=temp1; delay(100); for(i=7;i--;i>0) { temp0=_crol_(temp0,1),temp1=_cror_(temp1,1); P1=P3=temp0,P2=P0=temp1; delay(100); } j--; } //全部亮,闪三次 for(i=3;i--;i>0) { P0=P1=P2=P3=0x00; delay(300); P0=P1=P2=P3=0xff; delay(300); } //四个IO口同样跟踪流水while(k>0) { temp0=0xfe,temp1=0x7f; P1=P3=temp0,P2=P0=temp1; delay(60); for(i=7;i--;i>0) { temp0=temp0<<1,temp1=temp1>>1; P1=P3=temp0,P2=P0=temp1; delay(60); } k--; } 单片机流水灯实验报告 电子信息工程学系实验报告 课程名称:单片机原理及接口 实验项目名称:实验2 流水灯实验时间: xx-10-21 班级:电信092 姓名:蔡松亮学号: 910706247 一、实验目的: 进一步熟悉keil仿真软件、proteus仿真软件的使用。了解并熟悉单片机I/O口和LED灯的电路结构,学会构建简单的流水灯电路。掌握C51中单片机I/O口的编程方法和使用I/O口进行输入输出的注意事项。 二、实验原理: MCS-51系列单片机有四组8位并行I/O口,记作P0、P1、P2和P3。每组I/O口内部都有8位数据输入缓冲器、8位数据输出锁存器及数据输出驱动等电路。四组并行I/O端口即可以按字节操作,又可以按位操作。当系统没有扩展外部器件时,I/O端口用作双向输入输 出口;当系统作外部扩展时,使用P0、P2口作系统地址和数据总线、P3口有第二功能,与MCS-51的内部功能器件配合使用。 以P1口为例,内部结构如下图所示: 图 P1口的位结构 作输出时:输出0时,将0输出到内部总线上,在写锁存器信号控制下写入锁存器,锁存器的反向输出端输出1,下面的场效应管导通,输出引脚成低电平。输出1时,下面的场效应管截止,上面的上拉电阻使输出为1。作输入时:P1端口引脚信号通过一个输入三态缓冲器接入内部总线,再读引脚信号控制下,引脚电平出现在内部总线上。 I/O口的注意事项,如果单片机内部有程序存贮器,不需要扩展外部存贮器和I/O接口,单片机的四个口均可作I/O口使用;四个口在作输入口使用时,均应先对其写“1”,以避免误读;P0口作I/O 口使 用时应外接10K的上拉电阻,其它口则可不必;P2可某几根线作地址使用时,剩下的线不能作I/O口线使用;P3口的某些口线作第二功能时,剩下的口线可以单独作I/O口线使用。 基于51单片机的流水灯设计 一.基本功能 利用AT89c51作为主控器组成一个LED流水灯系统,实现8个LED 灯的左、右循环显示。 二.硬件设计 图1.总设计图 1.单片机最小系统 选用AT89C51的引脚功能 图2. AT89C51 XTAL1:单芯片系统时钟的反向放大器输入端。 XTAL2:系统时钟的反向放大器输出端,一般在设计上只要在XTAL1和XTAL2上接上一只石英震荡晶体系统就可以工作了,此外可以在两引脚与地之间加入20PF的小电容,可以使系统更稳定,避免噪音干扰而死机。 RESET:重置引脚,高电平动作,当要对晶体重置时,只要对此引脚电平提升至高电平并保持两个及其周期以上的时间便能完成系统重置的各项动作,使得内部特殊功能寄存器内容均被设成已知状态。 P3:端口3是具有内部提升电路的双向I/O端口,通过控制各个端口的高低电平了实现LED流水灯的控制。 复位电路 如图所示,当按下按键时,就能完成整个系统的复位,使得程序从新运行。 图3.复位电路 时钟电路 时钟电路用于产生单片机工作所需要的时钟信号,单片机本身就是一个复杂的同步时序电路,为了保证同步工作方式的实现,电路应在唯一的时钟信号控制下严格地按时序进行工作。 在AT89C51芯片内部有一个高增益反相放大器,其输入端为芯片引脚X1,输出端为引脚X2,在芯片的外部跨接晶体振荡器和微调电容,形成反馈电路,就构成了一个稳定的自激振荡器。此电路采用12MHz的石英晶体。 图4.时钟电路 2.流水灯部分 图5.流水灯电路 三.软件设计 编程语言及编程软件的选择 本设计选择C语言作为编程语言。C语言虽然执行效率没有汇编语言高,但语言简洁,使用方便,灵活,运算丰富,表达化类型多样化,数 据结构类型丰富,具有结构化的控制语句,程序设计自由度大,有很好 的可重用性,可移植性等特点。而汇编语言使用起来并没有这么方便。 本设计选用了Keil作为编程软件,.Keil C51生成的目标代码效率非常之高,多数语句生成的汇编代码很紧凑,容易理解。在开发大型软件时更能体现高 级语言的优势。 LED灯的显示 LED灯在低电平,即I/O口置‘0’时,会亮,相反就灭。此设计就是通过程序来控制I/O口的电平变化来实现流水灯左右循环闪烁。 四.程序 #include<> #include<> #define uint unsigned int #define uchar unsigned char #define kou P3 uchar code dp1[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f}; uchar code dp2[]={0x80,0x40,0x20} ; void delayms(uint z) //延时函数 《微处理器与接口技术课程设计》报告——流水灯设计 专业:电气工程及其自动化 班级:电气1221 姓名: 学号: 2015年7月14日 1.课程设计目的 1.1巩固和加深对单片机原理和接口技术知识的理解; 1.2培养根据课题需要选学参考书籍、查阅手册和文献资料的能力; 1.3学会方案论证的比较方法,拓宽知识,初步掌握工程设计的基本方法; 1.4学会软、硬件的设计和调试方法; 1.5能按课程设计的要求编写课程设计报告,能正确反映设计和实验成果,能用计算机绘制电路图和流程图。 2.课程设计要求 2.1 不得无故缺课。 2.2 独立完成规定的设计任务。 2.3 完成所有实验资料。 3.硬件设计 3.1 设计思想 1.尽可能采用功能强的芯片 (1)单片机的选型。随着集成电路技术的飞速发展,许多外围部件都已集成在芯片内,本身就是一个系统,这样可以省去许多外围部件的扩展工作, 设计工作大大简化。 (2)优先选用片内带有闪烁存储器的产品。 (3)考虑EPROM空间和RAM空间。 (4)对I/O端口的考虑 (5)预留A/D和D/A通道。 2.以软代硬 原则上,只要软件能做到且能满足性能要求,就不用硬件。 3.工艺设计 包括机箱、面板、配线、接插件等。必须考虑到安装、调试、维修的方便。另外,硬件抗干扰措施也必须在硬件设计时一并考虑进去。 3.2主要元器件介绍 LY-51S单片机开发板 8根杜邦线 AT89C51模块引脚 LED显示灯模块 3.3 功能电路介绍 使用德飞来单片机开发版,利用杜邦线将板子上LED灯与AT89C5的引脚对应连接,然后通过keil和STC-ISP烧制程序,达到LED灯的不同程度点亮。 RP1排阻:330~430欧姆,J9插针,用于连接需要使用的IO口。 单片机课程设计报告--心形流水灯 井冈山大学 机电工程学院 单片机 课程设计报告 课程名称:单片机 设计题目:心形流水灯 姓名:彭玉红 专业:生物医学工程 班级:11级医工本一班 学号:110615017 指导教师:王佑湖 2013年11月27日 目录 1引言 (2) 1.1设计任务 (2) 1.2设计要求……………………………………………… ..2 2 课题综述 (2) 2.1课题的来源 (2) 2.2面对的问题 (2) 3 系统分析 (2) 3.1 STC89C52单片机引脚图及引脚功能介绍 (2) 4 系统设计 (4) 4.1硬件设计 (4) 4.1.1硬件框图 (4) 4.1.2硬件详细设计 (5) 4.2 软件设计 (5) 4.3 硬件原理图 (6) 4.4 元件清单 (6) 4.5 硬件焊接图 (6) 4.6 代码编写 (7) 5心得体会 (7) 6致谢 (8) 参考文献 (8) 1 引言 单片机课程设计主要是为了让我们增进对STC89C51单片机电路的感性认识,加深对理论方面的理解。了解软硬件的有关知识,并掌握软硬件设计过程、方法及实现,为以后设计和实现应用系统打下良好基础。另外,通过简单课题的设计练习,使我们了解必须提交的各项工程文件,达到巩固、充实和综合运用所学知识解决实际问题的目的。 1.1设计任务 设计一个单片机控制的流水灯系统 1.2设计要求 (1)32个LED灯; (2)可实现多种的亮灯(如左循环,右循环,间隔闪,90度交叉闪等)。 2 课题综述 2.1 课题的来源 当今社会,这种由单片机芯片控制各种硬件工作的技术也日益成熟,并普及在交通、化工、机械等各个领域。而流水灯这项技术在生活中的应用更是广泛,较为贴近生活。而流水灯控制的设计所需要的知识也正好吻合了我们本学期对于单片机这门课程的学习,所以设计流水灯控制的这个课题让我们对知识的学习和巩固都有了进一步的加深。 2.2 面对的问题最新基于单片机的流水灯系统设计与实现
心形流水灯
流水灯设计与总结报告
基于单片机的流水灯的设计与制作
51单片机流水灯实验报告汇总
花样流水灯设计
心形流水灯程序
单片机流水灯实验报告
基于51单片机的流水灯设计
流水灯设备设计实验报告
单片机课程设计报告--心形流水灯
相关主题
文本预览