自动扶梯的驱动功率计算
3.1自动扶梯的主要参数
1) 提升高度H :建筑物上,下楼层间的高度。取H =5m ,为小提升高度。
2)理论输送能力t C ,设备每小时内理论上能输送的人数。当自动扶梯的各梯级均站满人时,就达到了其理论输送能力,由下式计算:
1
3600t KV C Y = t C ——理论输送能力(人/h )
K ——承载系数,与踏板名义宽度Z1有关。当Z1=1.0m 时,k=2
V ——额定速度(m/s )取v=0.65m/s
1Y ——梯级深度(m )取Y1=0.4m
所以t C =3600×20.650.4
?=11700(人/h) 3) 额定速度v 自动扶梯运行速度的快慢,直接影响到乘客在扶梯上的停留时间。与满载系数#密切相关,根据现场实测数据并经线性回归,得
?=1.1-0.6V=1.1-0.6×0.65=0.71
4) 梯级名义宽度1Z 取1Z =1.0m
5) 倾角α为o 30
3.2 自动扶梯阻力计算
为方便起见,扶梯自重的线载荷t q 表示,经过估算每个梯级的重量为70kg
梯级的宽度大约是400mm ;每个滚子的重量约为2.5kg,梯级的节距是100mm 。那么可以算出梯级的线载荷为,取g=10, 11个滚轮才间隔1.0m 。
t q =7010 2.5101120.4
?+???≈2700N 乘客的线载荷用r q 表示,
其计算公式如下
r q =0.4KQ ? Q ——估计平均每个乘客的重量大约60kg,
0.4——表示梯级的宽度大约是400mm ;
k ——每一梯级上可站立的人数;
? ——满载系数。(取0.71)
代值计算结果是r q =2200N
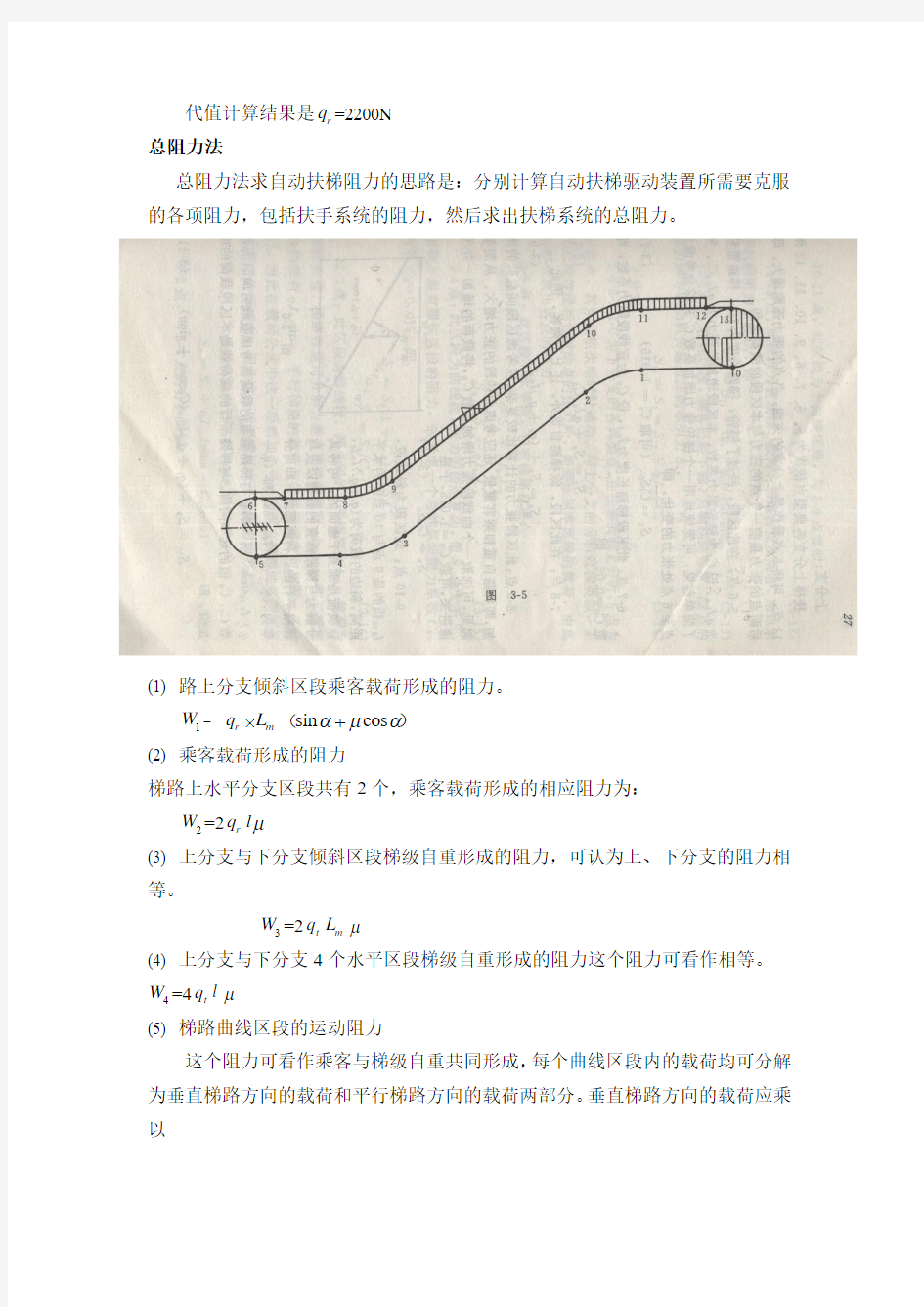
总阻力法
总阻力法求自动扶梯阻力的思路是:分别计算自动扶梯驱动装置所需要克服的各项阻力,包括扶手系统的阻力,然后求出扶梯系统的总阻力。
(1) 路上分支倾斜区段乘客载荷形成的阻力。
1W = r q m L ? sin cos αμα+()
(2) 乘客载荷形成的阻力
梯路上水平分支区段共有2个,乘客载荷形成的相应阻力为:
2W =2r q l μ
(3) 上分支与下分支倾斜区段梯级自重形成的阻力,可认为上、下分支的阻力相等。
3W =2t q m L μ
(4) 上分支与下分支4个水平区段梯级自重形成的阻力这个阻力可看作相等。 4W =4t q l μ
(5) 梯路曲线区段的运动阻力
这个阻力可看作乘客与梯级自重共同形成,每个曲线区段内的载荷均可分解为垂直梯路方向的载荷和平行梯路方向的载荷两部分。垂直梯路方向的载荷应乘以
cos 2α因子,而平行梯路方向的载荷则应乘以sin 2
α因子。经过分析可以得出梯路曲线区段运动阻力应为:
5W =[2r q (cos sin 22α
αμ+)+4t q cos 2μ
μ]l
(6)梯路转向区段运动阻力
这个区段的阻力主要通过摩擦传递,即
6W = t q ψμ
(7) 扶手系统阻力
7W =4r q (m L +2l )f βμ
上面各个式中的参数为
71~W W ——阻力(N );
r q ——乘客线载荷(N/m )2200N
t q ——梯路线载荷(N/m )2700N
μ ——梯级车轮的摩擦因子,取μ=0.025~003;
l ——进出端水平端长度(m ),小提升高度取0.6m.
m L ——倾斜区段梯路水平投影长度(m)计算的4.33m
l '——梯路曲线区段水平投影长度(m)取0.6m
ψ——梯路转向时,梯级所经路径的曲线长度(m );取2m β——乘客手握扶手胶带的附加阻力系数,取β=1.5
f q ——扶手胶带的线载荷(N/m ),可以取f q =25N/m;
f μ ——扶手胶带阻力系数,可取f μ=0.3
α——自动扶梯倾角 30
经过计算得 1W =5239N 2W =80N 3W =702N 4W =195N 5W =266
6W =195N 7W =240
扶梯系统的总阻力就是上述各项阻力之和,既
7654321W W W W W W W W ++++++=
W =6915N
3.3 自动扶梯的功率计算
自动扶梯的总功率计算可以用总阻力法求出,其具体公式如下: N=1000WV
η
N——自动扶梯的总功率(KW)
W——用总阻力法求出的自动扶梯总阻力
V——自动扶梯额定速度(m/s);0.65m/s
η——传动系统的效率
η的计算由四对滚动轴承副,(传动效率0.98);两个链传动副(传动效率0.92);一对蜗轮副传动(传动效率0.9)。
则η=42
??=0.703
0.980.920.90
代值计算总功率N=6.45
自动扶梯驱动机及其控制系统设计 摘要: 自动扶梯应用日益广泛,大型商场,宾馆都已离不开它,且在火车站,机场等更是大显身手。一个完整的扶梯系统包括电动机、主传动机构、链传动机构、以及滚轮、梯级、扶手等。通常把电动机、主传动机构、链传动机构以及制动、限速机构设计成一整体,叫做驱动机。驱动机是自动扶梯最为重要的机构,它的质量直接决定了自动扶梯的工作性能、工作状态、工作寿命等。 本设计通过对自动扶梯的基本结构的认识,考虑了各方面的因素,对自动扶梯的传动机构做了选择。进行了自动扶梯的功率计算、蜗杆轴的设计计算,低速轴的设计计算,刚度校核计算等,最后设计了自动扶梯的电气控制系统。 关键词:自动扶梯;电动机;驱动机装置;蜗杆轴;低速轴,电气控制
ABSTRACT: The range of Escalators includes products for commercial use in department stores, hotels or offices, as well as those for use in public areas such as railway stations, airports or the underground.A comprehensive system of escalator includes the electric motor,the main Transmission mechanism ,the chain transmission mechanism and steps,handrails. Usually,get the elector motor,the main transmission mechanism and additional brakes into one ,called the drive.The drive is the most important part of the escalator ,which effects directly the quality of the escalator.for example ,the drive is the origin of the noise and the vibration produced when the escalator works. Based on the escalator understanding of the basic structure ,and considering the various factors, we decide the transmission of escalator. We have maked the power calculation of escalator,the designing of worm shaft,the designing of Low-speed shaft ,calculation of stiffness checking and so on . At last,designed the electricity control system. Key words: Escalator ;motor;Drivers device;worm shaft;low-speed shaft;electricity control
600A模块的驱动功率计算 下面是参考的资料 驱动光耦及IGBT功耗计算 一种算法;参考附件;(IGBT 驱动器驱动能力的计算) 1 确定IGBT 门极电荷以及门极电容。 首先,在负载端没有输出电压的情况下,我们可以作如下计算。门极电荷可以利用公式 计算: Q=∫idt=CΔU 确定了Q, 我们可以用示波器观测门极电压,同时电压的上升ΔU 在测量中也能在示波 器上清楚的观测到。(见图1) 利用公式CIN=Q/ΔU。 CIN为输入结电容 2 Ciss 在折算中的经验公式 在IGBT 手册中的电容值Ciss,在实际电路应用中不是一个特别有用的参数,因为它是 通过电桥测得的,由于测量电压太小而不能到达门极门槛电压,在实际开关中增加的内部回馈效应(Miller 效应)在测量中未被包括在内。在测量电路中,一个25V 的电压加在集电极“C”上,在这种测量构架下,所测结电容要比Vce=0V 时要小一些。因此,Ciss 仅仅只能在IGBT 互相作比较时使用。 对于SIEMENS 和EUPEC 的IGBT 而言,下面的经验公式经过验证是较为准确可信的。CIN=5*Ciss (Ciss 可从IGBT 手册中得到) 3 驱动功率的计算 在输入结电容中存贮的能量可通过如下计算: W=1/2 CINΔU2^2 1 CINΔU2,ΔU 是门极上上升的电压。 在+15V -8V驱动电压下,ΔU 是23V。 在每个工作周期,门极被充电二次。一个IGBT 所需的驱动功率计算如下: 则 W=F* CIN*ΔU2^2 F=15K Ciss=5.3nf(查表) CIN=5*5.3=26.5 nf W=15000*23^2*26.5 =210Mw HCPL-316J输出功耗为600mW>>实际驱动功率210Mw 210 277 500
一、自动扶梯简介 (一)自动扶梯的型号 海神自动扶梯的产品系列主要为: 1)普通型自动扶梯,采用铝型材扶手支架,链条式传动,其倾斜度分别为30°和35°,梯级宽度系列1000 、800和600,运行速度为0.5m/s、0.45m/s。(主要参数见表一) 2)苗条型自动扶梯,采用不锈钢型材扶手支架,链条式传动,倾斜度分别为30°和35°,梯级宽度系列1000 、800和600,运行速度为0.5m/s、0.45m/s。(主要参数见表一) 表一: (二)特点、用途和适用范围 该自动扶梯采用GB16899-1997《自动扶梯和自动人行道的制造与安装安全规范》,具有以下特点: 1)结构紧凑、重量轻、输送能力大,且与提升高度无关; 2)运行平稳、运送客流量均匀、舒适感好,能连续地运送乘客; 3)可上下逆转,安装维修方便; 4)当停电或因故障不能运行时可作为普通楼梯使用,不影响交通。 (三)主要型号规格及技术参数(见表二)
表二: (四)主要结构及工作原理 自动扶梯由金属骨架、驱动装置、扶手驱动装置、导轨装置、梯级链、梯级、扶手装置、前沿板、电气、润滑等部分组成。(如图1) 图1 总图 1 金属骨架(如图2) 1)普通型自动扶梯采用角钢和槽钢等钢梁电焊成全封闭形,具有足够的强度和刚度。 2)苗条型自动扶梯采用矩形钢管等焊接成型,较之普通型无论强度、刚度还是外观均有大幅提高。 3)本骨架按乘客载荷计算,实测的最大挠度不超过支承距离L的1/750,完全符合国家标准规定。 3
2 驱动装置(见图3) 采用立式曳引机,它具有结构紧凑,运行平稳和可靠的优点,也可根据客户需要采用进口卧式主机。驱动装置上还装有制动器,在扶梯发生故障或正常停机时制停扶梯并保持稳定状态。 图3 驱动装置
LED驱动变压器设计计算公式 LF-GOE100YA0920A电源设计计算书 电源的主要特性及功能描述; 输入电压范围AC90V~AC305V,额定输入电压范围AC100V~AC277V.输入电源工作频率47Hz~63Hz,额定输入频率50Hz~60Hz.输出功率112W,额定输出DC90V~DC120V@0.92A开路输出电压:小于135V,短路输入功率:小于15W. 效率:90V ac input大于87%,220V ac input大于89%,277V ac input大于90%. 输出纹波:在输入电压范围内,纹波电压小于1.2V,其它功能附详细的规格书. 电源的相关参数设计计算如下: 1.对于电源工作保险丝的选定 Po(max)=126V*0.92A*1.05=121.716W(输出电压电流按照规格书的额定输出的上限计算).Pin(max)=Po(max)/Eff=121.716W/0.80=152.145W(按照电源起动到PFC电压还没升起来的这段时间的效率并适当取低一点点进行计算,否则,频繁的开关机有可能会冲坏保险丝). Iin rms(max)=Pin(max)/Vin(min)=152.145W/75V=2.029A(最小输入电压根据电源的最低起动电压计算,这款电源设定最低起机电压为75V,允许电源在最低起机电压下带额定负载起机) 考虑到电路中PFC校正值并不是完整的1,需要除以0.99的功率因素,以及查相关的保险丝的图表所得,在最高工作环境温度65度时,需扣除0.8的过热等因素引起的加速熔断的折扣率,再除以安规要求的0.75的折扣率,即保险丝因选择:2.029A/0.99/0.8/0.75=3.416A. 由于PFC+PWM两极架构的电源开机讯间的输入浪涌电流非常大,加热敏电阻后也能达到近80A,由此保险丝需选择大于3.416A的高分断能力的慢断型。 再考虑到这款LED电源是使用在室外的路灯上,需要承受较多且较大的雷击,按照规格要求是线对线打4KV,需选择耐4KV以上雷击的保险丝。 综合以上对此款产品的保险丝最小应选择AC300V5A慢断型保险丝。 2.桥堆的选定: 依据前面的计算知道,电源的最大输入功率为152.145W,最大输入RMS电流是2.029A,(最低输入电压频繁开关机,输出带满负载工作,此时PFC电路还没开始工作) 桥堆输出最低直流电压:DC(min)=AC75V*1.35=DC101.25V.(输入电压降额到AC75V,全波整流后的输出最大电压为输入的有效电压乘以根号2,但是随着输出带负载越大这个系数将会越低,这里取1.35,这个值不可以按照PFC上的输出电压进行计算,因为起机的时候PFC还没有开始工作,如果按照工作以后PFC上的电压进行计算,那当电源频繁的开关机动作的时候,桥堆将会被电流冲坏)。输入功率除以桥堆后的输出DC电压就得到了桥堆的输出平均电流:152.145W/101.25V=1.5027A.. 一般二极管类的元器件,考虑工作峰值电流的冲击,热损耗及高环境温度下工作等因素,这里按照输出平均电流的三倍进行取值。得:1.5027A*3=4.508A,由于5A的桥堆不常见,这里直接取6A的桥堆。
LED驱动电路工程中的计算方法 由已知电源功率计算LED的数量 例:额定输出功率为10W电源,使用额定的正向电流20mA,耗散功率为70mW条件下可配置多少个LED? 依以上公式 (即取所得数据的整数) 1:对于恒压驱动方式: 由已知的输出电源电压计算每支路串联LED数量及并联支路数 (1)计算每条支路的LED个数 (2)计算并联支路数 注:VLED值依不同发光颜色各有不同,用稳压电源驱动LED时,为了控制电流,通常需要串联电阻器. 例:一个额定输出电压为DC 24V,功率为10W电源,使用额定正向电流20mA,耗散功率为70mW额定的正向电压为1.8V.可配置多少个LED呢? (取所得数据的整数) 可以带10组支路,每支路14个LED串联构成的电路,共140个LED. 2:对于恒流驱动方式 由已知的电源输出电流及LED的电流值计算出并联支路数及每支路数量 (1)计算并联的支路数 (2)计算支路串接LED个数: 例:一个额定输出电流为DC 0.35A,额定功率为10W电源,驱动耗散功率为70mW,正向电流为0.02A的LED,可怎样配置? 并联支数路: (取所得数据的整数) 每支路串接数:个数 即可以带17组,每组8个LED串接,共136个LED. 线路损耗及线路压降的计算 P电线=I R V电线=IR
R电线=σ (备注:L为电线长度;S为电线横截面积;σ为电线电导率)也可以查电工手册. 例:用长度为10米(正、负极电线各5米),24AWG的铜芯电线,通过电流为2A,其损耗的功率及线路压降为多少? 查电工手册可知:R电线 = 0.737W V电线 = 2×0.737 =1.474V P电线 = 2 ×0.737 = 2.948W 从以上计算可以看出,线路电流较大时,要注意选择合适的导线截面,否则线路损耗及线路压降是相当大的. 我们只有完全了解LED和LED电源的基本特性,才能正确设计和使用LED光源. 资料整理——东莞市鸿泽洺电子有限公司https://www.doczj.com/doc/7c11455779.html,
第二部分自动扶梯技术规格及具体要求控制系统:钥匙开关启动 扶梯持续运行时间:每周 7日、每日不大于 12 小时持续工作。 梯级材料:铝合金,采用整体压铸造,三侧黄色警戒边框。 水平梯级: 3 级 提升高度:详见标书 扶手颜色:黑灰色 电源要求:动力: 380V, 50HZ, 三相;照明 : 220V, 50HZ, 单相 桁架:在工厂加工、喷涂好到现场拼装。最大挠度按照国家标准相关条款规定,需考虑乘客载荷、以及加上外装饰板的二次装饰重量(按照 1.5 毫米厚的不锈钢板加上常用加强底板来计算重量)的条件下。 护壁板(护栏板):护壁板采用高透明安全钢化玻璃,厚度不小于 10毫米,所有的玻璃外观平整,无扭曲变形,无生产、运输的痕迹,没有任何会引起光学畸变的瑕疵。相邻玻璃缝与珩架垂直,接合处间隙约为 3mm。 内盖板:不小于1.5m m厚发纹不锈钢板。盖板弯曲部分必须采用圆弧曲线过渡。发纹方向与梯级运行方向相同。不锈钢材质板采用不低于 304 等级。 外盖板:不小于1.5m m厚发纹不锈钢板。盖板弯曲部分必须采用圆弧曲线过渡。对于并列布置的扶梯,两台扶梯之间外盖板采用二合一的一块整盖板(沿着扶梯运行方向允许分段),发纹方向与梯级运行方向相同。包括扶梯外侧与洞口边部分。不锈钢材质板采用不低于 304 等级。 围裙板:采用不小于2mm厚发纹不锈钢板,发纹方向与梯级运行方向相同。不锈钢材质板采用不低于 304 等级。 底面侧面端部:用发纹不锈钢装饰,其中底部配有不锈钢光带,两台扶梯的底面, 包括两台之间的间隙部分也要统一封装。不锈钢材质板采用不低于 304 等级。 扶手导轨及支架:采用隐藏式扶手导轨及支架(苗条式),扶手导轨及支架采用不锈
IGBT驱动电路参数计算详解 大功率IGBT 模块在使用中驱动器至关重要,本文介绍在特定应用条件下IGBT门极驱动性能参数的计算方法,经验公式及有关CONCEPT 驱动板的选型标准,得出的一些参数值可以作为选择一款合适IGBT驱动器的基本依据。 1 门极驱动的概念 IGBT存在门极-发射极电容Cge,门极-集电极电容Cgc,我们将IGBT的门极等效电容定义为Cg,门极驱动回路的等效电路如下图所示: 其本质是:一个脉冲电压源向RC电路进行充放电,对于这个电压源,有2个物理量我们需要关心,1.它的功率;2.它的峰值电流。 2 驱动功率的计算 驱动器是用来控制功率器件的导通和关断。为了实现此功能,驱动器对功率器件的门极进行充电以达到门极开通电压VGE_on,或者是对门极进行放电至门极关断电压 VGE_off。 门极电压的两种电平间的转换过程中,在驱动器门极驱动电阻及功率器件组成的回路中产生一定的损耗。这个参数我们称为驱动功率PDRV。驱动器必须根据其所驱动的功率器件所需的驱动功率来选择。 驱动功率可以从门极电荷量QGate,开关频率fIN,以及驱动器实际输出电压摆幅ΔVGate 计算得出: P DRV = Q Gate * f IN * ΔV Gate (Eq. 1) 备注:P DRV: 驱动器每通道输出功率;f IN: IGBT开关频率;Q Gate :IGBT门极电荷,可从规格书第一页查出,不同IGBT该数值不同;ΔV Gate:门极驱动电压摆幅,等于驱动正压+U 和负压–U 之间差值。 如果门极回路放置了一个电容CGE (辅助门极电容),那么驱动器也需要对该电容进行充放电,如图1 所示:
摘要 自动扶梯应用日益广泛,大型商场,宾馆都已离不开它,且在火车站,机场等也愈大显身手。一个完整的扶梯系统包括电动机,主传动机构,链条机构,以及滚轮,梯级,扶手等。通常把电动机,主传动机构,链条机构以及制动,限速机构设计成一整体,叫做驱动机。 本文驱动机采用整轴式,用蜗杆副作为传动装置。驱动机是自动扶梯的驱动和减速机构,是其主要组成部分。主要功能是驱动扶梯减速运行,完成停车制动,限制超速和逆转运行。驱动机的产品质量直接影响整个扶梯的工作性能,工作状态,运载能力,工作寿命,所以扶梯对驱动机提出了极高的技术要求,研究驱动机,采用高技术设计驱动机,高质量地生产驱动机已成为开发和发展自动扶梯的重要课题。本文还对对蜗杆副进行了较核,计算对键槽进行了受力分析。 关键词:自动扶梯;电动机;机构;制动;驱动机
Abstract The range of Escalators includes products for commercial use - in department stores, hotels or offices, as well as those for use in public areas such as railway stations, airports or the underground.A comprehensive system of escalator includes the electric moror,the main The different specification thickness tubing, the spacingguide screw adjustment quantity size is different. After the caterpillar tractor the axis of a bridgemachine-finishing craft, designs the aggregate machine-tool which onits flange plate six holes drill hole working procedures uses huatai and the foundation.In the design process has consulted the massivedomestic and foreign correlation data, discovered at present does thedesign is a tradition but has the very many practical significance thedesign.. Transmission mechanism ,the chain transimission mechanism and steps,handrails. Usually,get the elector motor,the main transmission mechanism and additional brakes into one ,called the drive. As follows mainly clarifies the as follows main elaborationplastic tubing planet cutter system design.The turning gear cavity is loaded with, is the externalpower supply connects through it with on electric appliance.The drive is the most important part of the escalator ,which effects directly the quality of the escalator.for example ,the drive is the origin of the noise and the vibration produced when the escaltor works. Keywords : Escalator moror mechanism brake drive
自动扶梯的驱动功率计算 3.1自动扶梯的主要参数 1) 提升高度H :建筑物上,下楼层间的高度。取H =10m ,为大提升高度。 2)理论输送能力t C ,设备每小时内理论上能输送的人数。当自动扶梯的各梯级均站满人时,就达到了其理论输送能力,由下式计算: 1 3600t KV C Y = t C ——理论输送能力(人/h ) K ——承载系数,与踏板名义宽度Z1有关。当Z1=1.0m 时,k=2 V ——额定速度(m/s )取v=0.65m/s 1Y ——梯级深度(m )取Y1=0.4m 所以t C =3600×20.650.4 ?=11700(人/h) 3) 额定速度v 自动扶梯运行速度的快慢,直接影响到乘客在扶梯上的停留时间。与满载系数?密切相关,根据现场实测数据并经线性回归,得 ?=1.1-0.6V=1.1-0.6×0.65=0.71 4) 梯级名义宽度1Z 取1Z =1.0m 5) 倾角α为o 30 3.2 自动扶梯阻力计算 为方便起见,扶梯自重的线载荷t q 表示,经过估算每个梯级的重量为15kg 梯级的宽度大约是400mm ;每个滚子的重量约为2.5kg ,梯级的节距是100mm 。那么可以算出梯级的线载荷为,取g=10, 11个滚轮间隔为1.0m 。 t q =7010 2.5101120.4 ?+???≈925N 乘客的线载荷用r q 表示, 其计算公式如下 r q =0.4KQ ? Q ——估计平均每个乘客的重量大约60kg, 0.4——表示梯级的宽度大约是400mm ; k ——每一梯级上可站立的人数; ? ——满载系数。 (取0.71)
TSG特种设备安全技术规范 TSG T7026-2004 自动扶梯或自动人行道驱动主机 型式试验细则 Rule for Type Tests of Escalator or Moving Walk Drive Machines 中华人民共和国国家质量监督检验检疫总局颁布 2004年月日
目录 自动扶梯或自动人行道驱动主机型式试验细则 (1) 附件1 自动扶梯或自动人行道驱动主机型式试验所需技术文件和资料 (3) 附件 2 自动扶梯或自动人行道驱动主机型式试验方法 (4) 附件3 特种设备型式试验报告(自动扶梯或自动人行道驱动主机型式试验报告格式) (6) 附件 4 自动扶梯或自动人行道驱动主机产品配置表 (11)
自动扶梯或自动人行道驱动主机型式试验细则 第一条为了规范自动扶梯或自动人行道驱动主机的型式试验,统一自动扶梯或自动人行道驱动主机型式试验的项目、内容、要求、方法与型式试验报告书格式,根据《特种设备安全监察条例》和《电梯型式试验规则》,制定本细则。 第二条开展自动扶梯或自动人行道驱动主机型式试验的技术机构(以下简称型式试验机构),以及自动扶梯或自动人行道驱动主机的设计与制造等相关单位,必须遵守本细则的规定。 第三条本细则的技术指标和要求主要引用了《自动扶梯和自动人行道的制造与安装安全规范》等国家有关标准的规定。如上述相关标准被修订,应以最新标准为准。 第四条同一型号的驱动主机,按最大适用参数(额定输出转矩和最大额定速度)试验后即可覆盖其以下的参数规格。型式试验申请单位在申请时应列明所有被覆盖的参数规格。所谓同一型号是指:驱动主机的整体结构型式相同,减速箱的型式和中心距相同,电动机及制动器的结构和型式相同。 第五条在正式型式试验之前,型式试验申请单位应当向型式试验机构提供《自动扶梯或自动人行道驱动主机型式试验所需技术文件和资料》(附件1)中规定的技术文件和资料。 第六条型式试验申请单位应当向型式试验机构提供一台安装调试完毕、能够正常运行的完整自动扶梯或自动人行道驱动主机作为型式试验样品。 第七条自动扶梯或自动人行道驱动主机进行型式试验的前提,实施型式试验的条件、地点、程序与合格判定规则,以及型式试验机构应当履行的职责,必须按照《电梯型式试验规则》执行。 第八条型式试验机构进行自动扶梯或自动人行道驱动主机型式试验的内容、要求与方法,必须按照《自动扶梯或自动人行道驱动主机型式试验方法》(附件2)中的规定执行。特殊情况应当按照《电梯型式试验规则》的规定执行。 第九条型式试验完成后,型式试验机构必须按照《电梯型式试验规则》的规定和本细则规定的自动扶梯或自动人行道驱动主机的《特种设备型式试验报告》(附件3)格式,出具型式试验报告书和《特种设备型式试验合格证》,《特种设备型式试验合格
IGBT 的驱动特性及功率计算 1 IGBT 的驱动特性 1.1 驱动特性的主要影响因素 IGBT的驱动条件与IGBT的特性密切相关。设计栅极驱动电路时,应特别注意开通特性、负载短路能力和dv/dt 引起的误触发等问题。栅极电压U ge增加(应注意U ge过高而损坏IGBT),则通态电压下降(E on也下降),如图1所示(此处以200A IGBT为例)。由图1中可看出,若U ge固定不变时,导通电压将随集电极电流增大而增高,如图1a,电流容量将随结温升高而减少(NPT工艺正温度特性的体现)如图1b所示。 (a)Uge与Uce和Ic的关系(b)Uge与Ic和Tvj的关系 图1 栅极电压U ge与U ce和T vj的关系 栅极电压U ge直接影响IGBT 的可靠运行,栅极电压增高时有利于减小IGBT的开通损耗和导通损耗,但同时将使IGBT能承受的短路时间变短(10μs以下),使续流二极管反向恢复过电压增大,所以务必控制好栅极电压的变化范围,一般U ge可选择在-10~+15 V之间,关断电压-10 V,开通电压+15 V。开关时U ge与I g的关系曲线见图2 a和图2 b所示。
(a)开通时 (b)关断时 图2 开关时U ge与I c的关系曲线 栅极电阻R g增加,将使IGBT的开通与关断时间增加,使开通与关断能耗均增加,但同时,可以使续流二极管的反恢复过电压减小,同时减少EMI的影响。而门极电阻减少,则又使di/dt增大,可能引发IGBT误导通,但是,当R g减少时,可以使得IGBT关断时由du/dt 所带来误触发的可能性减小,同时也可以提高IGBT承受短路能量的能力,所以R g大小各有好坏,客户可根据自己设计特点选择。图3为R g大小对开关特性的影响,损耗关系请参照图4所示。 图3 R g大小对开关特性的影响(di/dt 大小不同)
毕业设计(论文)书 设计题目:自动扶梯驱动机及其PC可编程控制系统设计(英文):design of the control system by PC for the escalator and the system of drive 专业:机械设计制造及其自动化 班级:2000级机制(6)班 学生姓名: 指导教师: 2004 年 6 月9 日
题目:自动扶梯驱动机及其PC可编程控制系统设计 中文摘要 自动扶梯应用日益广泛,大型商场,宾馆都已离不开它,且在火车站,机场等也愈大显身手。一个完整的扶梯系统包括电动机,主传动机构,链条机构,以及滚轮,梯级,扶手等。通常把电动机,主传动机构,链条机构以及制动,限速机构设计成一整体,叫做驱动机。驱动机是自动扶梯最为重要的机构,它的质量直接决定了自动扶梯的工作性能,工作状态,工作寿命等。 关键词:自动扶梯;电动机;机构;制动;驱动机 英语摘要 The range of Escalators includes products for commercial use - in department stores, hotels or offices, as well as those for use in public areas such as railway stations, airports or the underground.A comprehensive system of escalator includes the electric moror,the main Transmission mechanism ,the chain transimission mechanism and steps,handrails. Usually,get the elector motor,the main transmission mechanism and additional brakes into one ,called the drive.The drive is the most important part of the escalator ,which effects directly the quality of the escalator.for example ,the drive is the origin of the noise and the vibration produced when the escaltor works. Keywords : Escalator; moror; mechanism; brake; drive 目录 第一篇自动扶梯驱动机的结构设计 概述 (5)
IGBT 的驱动特性及功率计算 陈暹辉 深圳裕能达电气有限公司 摘要:根据目前市场的使用情况,介绍IGBT的驱动特性及不同功率计算。 关键词:开通损耗关断损耗栅极电阻导通压降短路时间 1 IGBT 的驱动特性 1.1 驱动特性的主要影响因素 IGBT的驱动条件与IGBT的特性密切相关。设计栅极驱动电路时,应特别注意开通特性、负载短路能力和d v/d t引起的误触发等问题。栅极电压U ge 增加(应注意U ge过高而损坏IGBT),则通态电压下降(Eon 也下降),如图1所示(此处以200 A IGBT为例)。由图1中可看出,若U ge 固定不变时,导通电压将随集电极电流增大而增高,如图1 a,电流容量将随结温升高而减少(NPT 工艺正温度特性的体现)如图1b所示。 (a)Uge与Uce和Ic的关系(b)Uge与Ic和Tvj的关系图1 栅极电压U ge与U ce和T vj的关系 栅极电压U ge 直接影响IGBT 的可靠运行,栅极电压增高时有利于减小IGBT的开通损耗和导通损耗,但同时将使IGBT能承受的短路时间变短(10 μs以下),使续流二极管反向恢复过电压增大,所以务必控制好栅极电压的变化范围,一般V ge可选择在-10~+15 V之间,关断电压-10 V,开通电压+15 V。开关时U ge与I g的关系曲线见图2 a和图2 b所示。 栅极电阻R g 增加,将使IGBT的开通与关断时间增加,使开通与关断能耗均增加,但同时,可以使续流二极管的反恢复过电压减小,同时减少EMI的影响。而门极电阻减少,则又使d i/d t增大,可能引发IGBT误导通,但是,当R g减少时,可 (a)开通时(b)关断时 图2 开关时U ge与I g的关系曲线 以使得IGBT关断时由d u/d t所带来误触发的可能性减小,同时也可以提高IGBT承受短路能量的 1
表格式计算器参数说明 该程序是用于本公司小型天线对应的俯仰方位型天线座的结构设计,通过天线座的俯仰和方位轴的载荷进行计算,对驱动电机额定功率校核提供依据,仅作为动中通驱动电机校核条件之一。这里设计的表格式计算程序,使其计算简单易行。 1.程序预设条件: 1.1.反射体结构为实体抛物面。如果天线反射体口径面为椭圆,椭圆的长短轴之比小于1.5,可近似为实圆面,半径以长轴尺寸计。 1.2.风荷计算中:反射体不发生弹性形变、匀质、对称。反射体面上的风荷简化为作用于曲面上对称顶点的集中力和一个力矩。 1.3.天线驱动系统中摩擦力矩通常比较小且计算复杂,一般根据工程经验在天线驱动系统的效率中考虑,本程序不予计算。 1.4.本程序的驱动载荷包括风载荷、惯性载荷、俯仰转动部分重心不在转轴上重力引起的力矩。 1.5.本程序采用国际单位制。 2.输入变量(设计参数): (黄色表格红字) 天线面口面直径 D 单位: m (米) 平均风速V 单位 /m s (米/秒) 天线面顶点到俯仰轴距离L 单位 m (米) 天线面顶点到方位轴距离l 单位 m (米) 天线俯仰角速度ω 单位 s ?(?角度秒) 天线俯仰角加速度ε 单位 2 s ?(2?角度秒) 天线方位角速度Ω 单位 s ?(?角度秒) 天线方位角加速度E 单位 2 s ?(2?角度秒) 天线俯仰系统质心到俯仰轴距离R 单位 m (米) 天线俯仰系统质量fy m 单位 kg (千克) 天线俯仰系统对俯仰轴心线的转动惯量z I 单位 2kg m ?(2?千克米)
天线方位系统对俯仰轴心线的转动惯量y I 单位 2kg m ?(2?千克米) 注意:表格中未输入变量值默认为零,转动惯量'z I 、'y I 可通过CAD 软件得到。 2.1.物理常量:(绿色表格) 根据实际情况,风载荷系数、空气密度等可以按最新的实验数据或者技术要求进行修改。 2.3.中间变量:(蓝色表格) 表格中蓝色区域为计算辅助参数,不需要修改。 2.4.输出结果:(橙色表格) 最大风载荷max wind M - 单位 N m ?(?牛顿米) 俯仰轴驱动扭矩fy T 单位 N m ?(?牛顿米) 方位轴驱动力矩fw T 单位 N m ?(?牛顿米) 附录1: 实体反射面天线座驱动轴的载荷计算 1 风载荷 1.1 风速的确定 根据产品风级要求,从《风力等级表》中选择相应的风速输入表格。 1.2 天线面上对称中心的静态风荷 天线反射体受任意向的风力简化为集中力R F 和力矩M 。建立坐标OXYZ ,以O 点为原点,O 点为天线面对称中心,θ为风向与天线对称轴的夹角,XY 面与风向平行,风力R F 在X 轴Y 轴的分力x F 、y F 。如图1所示: 根据资料有以下关系: =x x F C Aq (1) =y y F C Aq (2) O m M C ADq = (3) 空气动压21 = 2 q V ρ (4) 图1
匀速运行,非精确计算可以套用以下公式:Ta=(Fa*I)/(2*3.14*n1) 式中 Ta:驱动扭矩kgf.mm; Fa:轴向负载N(Fa=F+μmg,F:丝杠的轴向切削力N,μ:导向件的综合摩擦系数,m:移动物体重量(工作台+工件)kg,g:9.8 ); I:丝杠导程mm; n1:进给丝杠的正效率。 计算举例: 假设工况:水平使用,伺服电机直接驱动,2005滚珠丝杠传动,25滚珠直线导轨承重和导向,理想安装,垂直均匀负载1000kg,求电机功率: Fa=F+μmg,设切削力不考虑,设综合摩擦系数μ=0.1,得Fa=0.1*1000*9.8=980N; Ta=(Fa*I)/(2*3.14*n1),设n1=0.94,得Ta=980*5/5.9032≈830N.mm=0.83N.M 根据这个得数,可以选择电机功率。以台湾产某品牌伺服为例,查样本得知,额定扭矩大于0.83N.M的伺服电机是400W。(200W是0.64N.M,小了。400W额定1.27N.M,是所需理论扭矩的1.5倍,满足要求) 当然咯,端部安装部分和滚珠丝杠螺母预压以及润滑不良会对系统产生静态扭矩,也称初始扭矩,实际选择是需要考虑的。另外,导向件的摩擦系数不能单计理论值,比如采用滚珠导轨,多套装配后的总摩擦系数一定大于样本参数。而且,该结果仅考虑驱动这个静止的负载,如果是机床工作台等设备,还要考虑各向切削力的影响。 若考虑加速情况,较为详细的计算可以参考以下公式(个人整理修正的,希望业内朋友指点): 水平使用滚珠丝杠驱动扭矩及电机功率计算: 实际驱动扭矩:T=(T1+T2)*e T:实际驱动扭矩; T1:等速时的扭矩; T2:加速时的扭矩; e:裕量系数。 等速时的驱动扭矩:T1=(Fa*I)/(2*3.14*n1) T1:等速驱动扭矩kgf.mm; Fa:轴向负载N【Fa=F+μmg, F:丝杠的轴向切削力N,μ:导向件综合摩擦系数,m:移动物体重量(工作台+工件)kg,g:9.8 】; I:丝杠导程mm; n1:进给丝杠的正效率。 加速时的驱动扭矩:T2=T1+J*W T2:加速时的驱动扭矩kgf.m; T1:等速时的驱动扭矩kgf.m; J:对电机施加的惯性转矩kg.m2【J=Jm+Jg1+(N1/N2)2*[Jg2+Js+m(1/2*3.14)2]】W:电机的角加速度rad/s2; Jm:电机的惯性转矩k g.m2;
IGBT驱动参数计算详解 大功率IGBT 模块在使用中驱动器至关重要,本文介绍在特定应用条件下IGBT门极驱动性能参数的计算方法,经验公式及有关CONCEPT 驱动板的选型标准,得出的一些参数值可以作为选择一款合适IGBT驱动器的基本依据。 1 门极驱动的概念 IGBT存在门极-发射极电容Cge,门极-集电极电容Cgc,我们将IGBT的门极等效电容定义为Cg,门极驱动回路的等效电路如下图所示: 其本质是:一个脉冲电压源向RC电路进行充放电,对于这个电压源,有2个物理量我们需要关心,1.它的功率;2.它的峰值电流。 2 驱动功率的计算 驱动器是用来控制功率器件的导通和关断。为了实现此功能,驱动器对功率器件的门极进行充电以达到门极开通电压VGE_on,或者是对门极进行放电至门极关断电压VGE_off。 门极电压的两种电平间的转换过程中,在驱动器门极驱动电阻及功率器件组成的回路中产生一定的损耗。这个参数我们称为驱动功率PDRV。驱动器必须根据其所驱动的功率器件所需的驱动功率来选择。转载请注明出处 驱动功率可以从门极电荷量QGate,开关频率fIN,以及驱动器实际输出电压摆幅ΔVGate 计算得出: P DRV = Q Gate * f IN * ΔV Gate (Eq. 1) 备注:P DRV: 驱动器每通道输出功率;f IN: IGBT开关频率;Q Gate :IGBT门极电荷,可从规格书第一页查出,不同IGBT该数值不同;ΔV Gate:门极驱动电压摆幅,等于驱动正压+U 和负压–U 之间差值。 如果门极回路放置了一个电容CGE (辅助门极电容),那么驱动器也需要对该电容进行充放电,如图1 所示:
Calculation of the Necessary Power of Stage Motor Tim Li, Frank Zhu, Haolong Zhang 14/07/2014 Parameters: Mass of the stage: kg M s 2= Mass of the extrusion head: kg M e 3= Mass of the ball screw: kg M b 5.0= Mass of the coupler: kg M c 05.0= Screw pitch: mm P B 4= Diameter of the ball screw: mm d 101= Inner diameter of the coupler: mm d 92= Outer diameter of the coupler: mm d 183= Required speed of the stage: s mm V /100= Formula: 1. N P T *9550= T: Torque P: Power N: Rotate speed 2. β*J T = T: Torque J: Inertia β: Angular acceleration 3. 2)2/(*πB P M J = J: Inertia M: Mass B P : Screw pitch Calculation: 1. Necessary torque for friction Friction between the stage and the ball screw Estimated friction coefficient: 5.0=μ N g M M f e s 2510*)32(*5.0*)(*=+=+=μ
斗式提升机驱动功率的简易计算 实际生产中常会遇到斗式提升机功率的计算问题,设计手册中有专门的功率计算公式,但是其涉及因素太多,不仅要对运行部件进行受力分析,还要查阅相关资料并结合实际选取合适的参数,对人员素质要求较高,计算速度慢。现结合我厂情况,介绍1种简易可行的计算方法。 分析提升机的运动可知,提升机的驱动功率主要消耗于3个方面:1)提升物料;2)克服运动中的阻力;3)克服料斗掏取物料的阻力。其中主要是1,其它两方面的消耗在计算中可用系数进行修正弥补。 物料的提升过程是连续的,不均匀的,台时产量实际上是单位时间内提升物料的累计值,我们可将台时产量G年作是一个理想化的质点来研究,这样提升机在工作时必须使物料达到一定的提升高度H,即具有的相应势能;达到相应的线速度V,即具有动能。要使物料具有一定的动能与势能,就要对物料做功,根据动能、势能的计算公式可得出单位时间内需对物料做的功是: W=(G*g*H+1/2*G*v2)*103 根据功率的定义可算出驱动轮轴所需功率P O: P0=W/3600*10-3 考虑到2、3因素及功率的储备量,需要用系数K对P0进行修正,根据对我厂40余台提升机的分析、对比后得出,系数K宜选在2.5~3.5之间,总驱动功率P 为: P=KP0=(2.5~3.5)*P0 即:P=(2.5~3.5)*1/3600*(G*g*H+1/2*G*v2) 式中:W--单位时间内对物料所做的功,J; G—提升能力,t/h H—提升高度,m v—上驱动轮线速度,m/s P0—驱动轮轴所需功率,kW P—斗式提升机驱动功率,kW 这样根据结果可查阅相关手册来选取电动机。