第一级传动主传动及二级传动链 第二级传动
一、 链轮Z1的设计计算:
1) 材料选择: 采用45#调质处理表面硬度40-50HRC 2) 分度圆直径:d=p/(sina180°/z)=19.05/(sina180°/25)=151.995(mm) 3) 齿顶圆直径:d a d amax =d+1.25p-d 1=151.995+1.25×19.05-11.91=163.8975(mm) (查表:d 1=11.91) d amin =d+(1-1.6/z 1)p-d 1=151.995+(1-1.6/25) ×19.05-11.91=157.9158(mm) 取d a =1600 -0.03(mm) 4) 齿根圆直径d f: d f =d-d 1=151.995-11.91=140.085(mm) 5) 分度圆弦齿高:h a h amax =(0.625+0.8/z 1)p-0.5d 1=(0.625+0.8/25)×19.05-0.5×11.91=6.561(mm) h amin =0.5(p- d 1)=0.5×(19.05-11.91)=3.570(mm) 取h a =4.5(mm) 6) 最大齿根距离:L x L x =dcos(90°/z 1)-d 1=151.995×cos(90°/25)-11.91=139.785(mm) 7) 齿侧凸缘直径:d g (查表:h 为链的内连扳高度;h=18.08) d g =pcot(180°/z 1)-1.04h-0.76=19.05×cot(180°/25)-1.04×18.08-0.76=131.233(mm); 取d g =131mm 8) 齿侧圆弧半径:r e r emax =0.008d 1(180+z 12)=0.008×11.91×(180+252 )=76.7004(mm) r emin =0.12d 1(2+z 1)=0.12×11.91×(2+25)=38.5884(mm) 9) 滚子定位圆弧半径:r i r imax =0.505d 1+0.069 3 1 d =0.505×11.91+0.069×3 √11.91=6.172(mm) r imin =0.505d 1=0.505×11.91=6.015(mm) 10) 滚子定位角:α αmax =140°-90°/z 1=140°-90°/25=136.4° αmin =120°-90°/z 1=120°-90°/25=116.4° 11) 齿宽:b f1 (b 1内链节内宽) b f1=0.95b 1=0.95×12.57=11.9415(mm) 12) 齿侧倒角:b a b a =0.13p=0.13×19.05=2.4765(mm) 13) 齿侧半径:r x r x =p=19.05(mm) 14) 齿全宽:b fm (m 排数) b fm =(m-1)p t + b f1=(1-1)p t +11.9415=11.9415(mm) 15) 轴毂厚度:h (假设轴孔为50mm,<152mm 范围内取值) h=K+d k /6+0.01d=9.5+ d k /6+0.01×151.995=19.353(mm) 16) 轮毂长度:l l max =3.3h=3.3×19.353=63.866(mm) l min =2.6h=2.6×19.353=50.319(mm) 17) 轮毂直径:d h d h =d k +2h=50+2×19.353=88.706(mm) 二、 Z 1对应轴的设计计算 1) 材料选45#,[]30=τMp(空心轴)
摩擦轮传动和带传动 §1-1 摩擦轮传动 一、摩擦轮传动的工作原理和传动比1.摩擦轮传动工作原理摩擦轮传动是利用两轮直接接触所产生的摩擦力来传递运动和动力的一种机械传动。图1―la所示为最简单的摩擦轮传动,由两个相互压紧的圆柱形摩擦轮组成。在正常传动时,主动轮依靠摩擦力的作用带动从动轮转动,并保证两轮面的接触处有足够大的摩擦力,使主动轮产生的摩擦力矩足以克服从动轮上的阻力矩。如果摩擦力矩小于阻力矩,两轮面接触处在传动中会出现相对滑移现象,这种现象称为“打滑”。 增大摩擦力的途径,一是增大正压力,二是增大摩擦因数。增大正压力可以在摩擦轮上安装弹簧或其他的施力装置 (图1—2a)。但这样会增加作用在轴与轴承上的载荷,导致增大传动件的尺寸,使机构笨重。因此,正压力只能适当增加。增大摩擦因数的方法,通常是将其中一个摩擦轮用钢或铸铁材料制造,在另一个摩擦轮的工作表面,粘上一层石棉、皮革、橡胶布、塑料或纤维材料等。轮面较软的摩擦轮宜作主动轮,这样可以避免传动中产生打滑,致使从动轮的轮面遭受局部磨损而影响传动质量。 2.传动比 机构中瞬时输入速度与输出速度的比值称为机构的传动比。对于摩擦轮传动,其传动比就是主动轮转速与从动轮转速的比值。传动比用符号i表示,表达式为
(1-1)
式中 n l ――主动轮转速,r/min; n z ——从动轮转速,r/min。 如图1―la所示,传动时如果两摩擦轮在接触处P点没有相对滑移, 则两轮在p点处的线速度相等,即v 1=v 2 。 因为 v 1 = () v 2 = () 所以 或 由此可知:两摩擦轮的转速之比等于它们直径的反比。与式 (1-1) 比较,得 (1-2) 式中主动轮直径,mm;
§9-5 链传动设计实例 例9-1 设计一拖动某带式运输机的滚子链传动。已知条件为:电动机型号Y160M-6(额定功率P =7.5kW,转速n1=970r/min),从动轮转速n2=300r/min,载荷平稳,链传动中心距不应小于550mm,要求中心距可调整。 解: 1、选择链轮齿数 链传动速比: 由表9-5选小链轮齿数z1=25。 大链轮齿数z2=i z1=3.23×25=81,z2<120,合适。 2、确定计算功率 已知链传动工作平稳,电动机拖动,由表9-2选K A =1.3 ,计算功率为 P c =K A P =1.3×7.5kW=9.75kW 3、初定中心距a0,取定链节数L p 初定中心距a0=(30~50)p,取a0=40p。 取L p =136节(取偶数)。 4、确定链节距p
首先确定系数K Z ,K L ,K P 。 由表9-3查得小链轮齿数系数K Z =1.34; 由表9-9查得K L =1.09。 选单排链,由表9-4查得K P =1.0。 所需传递的额定功率为 由表9-7选择滚子链型号为10A ,链节距 p =15.875mm 。 5、确定链长和中心距 链长L =L p ×p /1000=136×15.875/1000=2.16m 中心距 a >550mm ,符合设计要求。 中心距的调整量一般应大于2p 。 △a ≥2p =2×15.875mm=31.75mm 实际安装中心距 a' =a -△a =(643.3-31.75)mm=611.55mm 6、求作用在轴上的力 链速 工作拉力 F =1000P/v =1000×7.5/6.416=1168.9N 工作平稳,取压轴力系数K Q =1.2 轴上的压力 F Q =K Q ×F =1.2×1168.9N=1402.7N 自 测 题 1、与带传动相比,链传动的优点是__。 A 、工作平稳,无噪声 B 、寿命长
摩擦轮传动和带传动2 一、判断 1、工厂中生产的最小产品是构件。() 2、机构的机构的构件之间必定具有确定的相对运动。() 3、一根轴上用键连接一个齿轮,它们组成一个构件。() 4、高副由于是点、线接触,故单位面积承载小,不易磨损。() 5、构件可以是单一整体,也可以是几个相互之间没有相对运动的物体组合。() 6、整体式连杆既是构件也是零件。() 7、轴和滑动轴承组成高副,固定床身的螺栓和螺母组成螺旋副。() 8、运动副是联接,联接也就是运动副。() 9、构件都是可动的。() 10、自行车运动时,轮子运动,故轮上钢丝也在运动,钢丝是构件。() 11、摩擦力由压紧力产生,因此摩擦轮传动的压紧力越大越好。() 12、两个相互压紧的轮子就能组成摩擦轮传动装置。() 13、两轴平行的摩擦轮传动,其旋转方向相同。() 14、摩擦力的方向总是与该物体滑动或滑动趋势的方向相反。() 15、机构是用来传递运动和力的构件系统。() 16、多个构件组成多个运动副,一个构件组成一个运动副。() 17、火车在行驶中,车轮与铁轨构成了转动副。() 18、摩擦轮传动中,通常将轮面较软的轮作为从动轮,以防止从动轮的轮面遭受局部严重磨损。 () 19、摩擦轮传动的打滑是不可避免的。() 二、填空 1、车床上的主轴属于机器的____________________ 2、电动自行车、数控机床、飞机、千斤顶,不属于机器的是____________________ 3、大多数机器都包含若干个_________,机器一般由_________组成,机构由_________组成,构件又由_________组成。______是工厂的制造单元_________是机器的运动单元。 4、机构的只具有机器的前两个特征。机构的特征为:______________________、____________________。 5、如图螺旋传动机构是由_______________个构件组成。 6、单缸内燃机中,活塞与连杆之间的连接属于___________副。 7、如图所示机构是由__________________个运动副组成。 8、判断运动副具体类型的依据是____________________ 9、高副中高的含义是____________________ 10、圆锥摩擦轮传动适用于________________场合。 11、V带的传动性能主要取决于____________________层。 12、带传动使用张紧轮的目的是____________________ 13、一般动力机械中,主要采用____________带传动。 14、三角带的直径是指____________________ 三、选择 1、 2、近代机器的雏形从古代的()机械上可以看到。
链传动自测题 1、与带传动相比,链传动的优点是_b_。 A、工作平稳,无噪声 B、寿命长 C、制造费用低 D、能保持准确的瞬时传动比 2、与齿轮传动相比,链传动的优点是d__。 A、传动效率高 B、工作平稳,无噪声 C、承载能力大 D、能传b递的中心距大 3、套筒滚子链中,滚子的作用是_b_。 A、缓冲吸震 B、减轻套筒与轮齿间的摩擦与磨损 C、提高链的承载能力 D、保证链条与轮齿间的良好啮合 4、在一定转速下,要减轻链传动的运动不均匀和动载荷,应_d_。 A、增大链节距和链轮齿数 B、减小链节距和链轮齿数 C、增大链节距,减小链轮齿数 D、减小链条节距,增大链轮齿数 5、为了限制链传动的动载荷,在链节距和小链轮齿数一定时,应限制_a _。 A、小链轮的转速 B、传递的功率 C、传动比 D、传递的圆周力 6、链传动在工作中,链板受到的应力属于_d_。 A、静应力 B、对称循环变应力 C、脉动循环变应力 D、非对称循环变应力 7、大链轮的齿数不能取得过大的原因是_d_。 A、齿数越大,链条的磨损就越大 B、齿数越大,链传动的动载荷与冲击就越大 C、齿数越大,链传动的噪声就越大 D、齿数越大,链条磨损后,越容易发生"脱链现象" 8、链传动中心距过小的缺点是c__。 A、链条工作时易颤动,运动不平稳 B、链条运动不均匀性和冲击作用增强 C、小链轮上的包角小,链条磨损快 D、容易发生"脱链现象" 9、两轮轴线不在同一水平面的链传动,链条的紧边应布置在上面,松边应布置在下面,这样可以使b__。 A、链条平稳工作,降低运行噪声 B、松边下垂量增大后不致与链轮卡死 C、链条的磨损减小 D、链传动达到自动张紧的目的
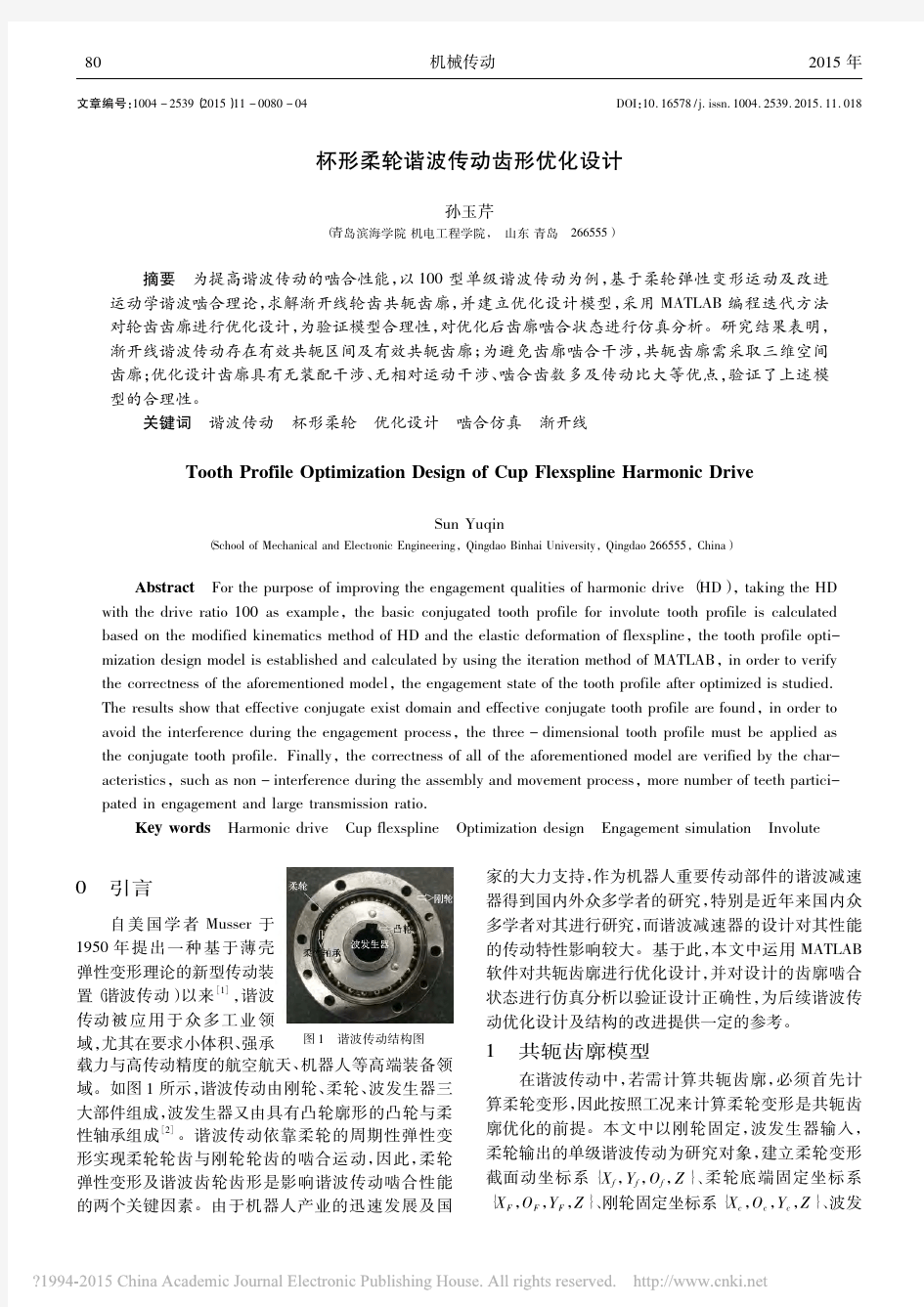
谐波减速器原理及特点 1. 概述 1.1 产生及发展 谐波齿轮传动技术是20世纪50年代末随着航天技术发展而发明的一种具有重大突破的新型传动技术,由美国人C. W.马瑟砖1955年提出专利,1960年在纽约展出实物。谐波传动的发展是由军事和尖端技术开始的,以后逐渐扩展到民用和一般机械上。这种传动较一般的齿轮传动具有运动精度高,回差小,传动比大,重量轻,体积小,承载能力大,并能在密闭空间和辐射介质的工况下正常工作等优点,因此美,俄,日等技术先进国家,对这方面地研制工作一直都很重视。如美国就有国家航空管理局路易斯研究中心,空间技术试验室,USM公司,贝尔航空空间公司,麻省理工学院,通用电器公司等几十个大型公司和研究中心都从事过这方面的研究工作。前苏联从60年代初期开始,也大力开展这方面的研制工作,如苏联机械研究所,莫斯科褒曼工业大学,列宁格勒光学精密机械研究所,全苏联减速器研究所等都大力开展谐波传动的研究工作。他们对该领域进行了较系统,较深入的基础理论和试验研究,在谐波传动的类型,结构,应用等方面有较大的发展。日本长谷齿轮株式会社等有关企业在谐波齿轮传动的研制和标准化、系列化等方面作出了很大贡献。西欧一些国家除了在卫星,机器人,数控机床等领域采用谐波齿轮传动外,对谐波传动的基础理论也开始进行系统的研究。谐波齿轮传动技术1970年引入日本,随之诞生了日本第一家整体运动控制的领军企业-日本Harmonic Drive SystemsInc.(简称HDSI)。目前日本HDSI公司是国际领先的谐波减速器公司,其生产的Harmonic Drive谐波减速器,具有轻量、小型、传动效率高、减速范围广、精度高等特点,被广泛应用于各种传动系统中。 谐波传动技术于1961年由上海纺织科学研究院的孙伟工程师介绍入我国。此后,我国也积极引进并研究发展该项技术,1983年成立了谐波传动研究室,1984年“谐波减速器标准系列产品”在北京通过鉴定,1993年制定了 GB/T14118-1993谐波传动减速器标准,并在理论研究、试制和应用方面取得较
e 题目谐波齿轮减速器的设计与建模 学生姓名 e 学号 e 所在学院机械学院 专业班级机械制造及其自动化 指导教师 e __ __ 完成地点 ___ 2009 年 6 月 10 日
谐波齿轮减速器的设计与建模 作者:e (e) 指导老师:e [摘要]:谐波齿轮传动是50年代中期,随着空间技术的发展,在薄壳弹性变形的理论基础上发展起来的一种新型的传动技术。我国从1961年开始谐波齿轮传动方面的研制工作,并且在研究、试制和使用方面取得了较大的成绩。但是在民用产品应用中,谐波减速器存在着传动“爬行”和“丢步的现象严重影响其谐波齿轮类产品的设计制造,也制约着其产品的不断推广,是该产品亟待解决的技术难题。本文主要介绍了谐波齿轮传动的原理,发展历史,应用领域,发展趋势及其优缺点。前半部分介绍了谐波齿轮减速器的设计计算,为了更好地分析谐波齿轮传动,后半部分用PRO/E建立了三维模型。写出了主要零件的绘制过程,并展示了各个零部件,最后给出了装配图。 [关键词]:谐波齿轮,传动设计,三维模型,装配
The design and modeling of harmonic gear reducer Author:e (e) Tutor: e [Abstract]Harmonic gear transmission is developed with the of space science and thchnology in mid 50s,on the basis of elastic thin shell theory developed a new type of drive technology.So far ,we have already had dozen of units engaged in the research ofthis aspect in our country ,and developed into a variety of types of harmonic gear transimission deviced.In this field it had research at different level on all issues, but many problems still has not yet been determined,and some regularity has not revealed .such as civilian products,There is “crawling”and”lost step”phenomenon in the harmonic gear reducer transmission .So it is impact on the design of harmonic gear product manufacturing,also restrict the further promotion of its products.and solove the problem that exist in the transmission ,it isan urgent need of a job in the current this kind of products.This artical main introducted the theory harmonic gear reducer ,and the development history of harmonic gear drive application filed,development trend,advantagesand disadvantages.The former introduce the design and calculate of harmonic gear reducer.In order to analyze the harmonic gear drive ,The later part with PRO/E to establish the three-dimensional model.Write the drawing process of the main parts .and showing all the parts .Finally ,given the assembly diagram. [ Key words]:Harmonic gear ,Transmission design,Three-disminsional model ,Assemble.
第5讲 摩擦轮传动与带传动 学习目标及考纲要求 1.理解摩擦轮传动与带传动的类型、工作原理及应用场合。 2.掌握带传动的主要参数的含义及带传动传动比的计算。 3.熟悉三角带的型号,了解其选用方法。 4.理解带传动的安装、调整及维护方法。 知识梳理 一、摩擦轮传动的原理 1.摩擦轮传动:利用两轮直接接触所产生摩擦力来传递运动和动力的一种机械传动。 2.传动条件和打滑条件 传动条件:摩擦力矩﹥阻力矩 打滑条件:摩擦力矩﹤阻力矩。打滑时传动不正常的是从动轮,打滑是可以避免的。 3.增大摩擦力途径(见表1-5-1) 表1-5-1 措 施 具 体 方 法 增大正压力 安装弹簧或其他施力装置(只能适当加)。 增大摩擦因数 一轮用钢或铸铁,另一轮工作表面粘上一层石棉、皮革、塑料、橡胶等。 轮面较软的作主动轮。 4.摩擦轮传动主要参数(见表1-5-2) 表1-5-2 参 数 计 算 公 式 备 注 传动比 摩擦轮传动的传动比指主动轮转速与从动轮转速之比,也等于它们直径的反比。 速度 传动时如果两摩擦轮在接触处没有相对滑移,则两轮在该点的线速度相等,注意公式的单位。 中心距 2 -21 22 1d d a d d a = += 内接式:外接式: 两轮中心的距离,注意是外接还是内接摩擦轮传动。 12 21n D i n D ==100060n D v π=?
二、摩擦轮传动的特点 1.结构简单,使用维修方便,适用于近距离传动。 2.传动时噪声小,可在运转中变速、变向。 3.过载时,两轮接触处会打滑,因而可防止薄弱零件的损坏,起安全保护作用。 4.在两轮接触处有打滑现象,所以不能保持准确的传动比。 5.传动效率低,不宜传递较大的转矩,适用于高速、小功率传动。 三、摩擦轮传动类型 外接圆柱式 平行轴摩擦轮传动 内接圆柱式 外接圆锥式 相交轴摩擦轮传动内接圆锥式 圆柱平盘式 四、带传动类型和工作原理 1.带传动的类型(见表1-5-3) 表1-5-3 类型名称图形 摩擦传动平带传动V带传动圆带传动 啮合传动同步带传动 2.带传动的工作原理 带传动是利用带作为中间挠性件,依靠带与带轮之间的摩擦力或啮合来传递运动和(或)动力的。 3.打滑和弹性滑动 带传动打滑一般出现在小带轮上,可以避免的;带弹性伸长及拉力差引起的相对滑动称为弹性滑动,不可以避免。
工业机器人核心部件-谐波减速器 晴星期二2009-03-24 00:18 csuzhm:作 者.
机器人驱动系统要求传动系统间隙小、刚度大、输出扭矩高以及减速比大,常用的减速机构有:1)RV减速机构; 2)谐波减速机械; 3)摆线针轮减速机构; 4)行星齿轮减速机械; 5)无侧隙减速机构; 6)蜗轮减速机构; 7)滚珠丝杠机构; 8)金属带/齿形减速机构; 9)球减速机构。 其中谐波减速器广泛应用于小型的六轴搬运及装配机械手中,下面介绍其工作原理。
以下内容摘自百度百科(稍有修改): 谐波齿轮减速器是利用行星齿轮传动原理发展起来的一种新型减速器。谐波齿轮传动(简称谐波传动),它是依靠柔性零件产生弹性机械波来传递动力和运动的一种行星齿轮传动。 (一)传动原理 它主要由三个基本构件组成: (1)带有内齿圈的刚性齿轮(刚轮)2,它相当于行星系中的中心轮; (2)带有外齿圈的柔性齿轮(柔轮)1,它相当于行星齿轮; (3)波发生器H,它相当于行星架。 作为减速器使用,通常采用波发生器主动、刚轮固定、柔轮输出形式。 波发生器H是一个杆状部件,其两端装有滚动轴承构成滚轮,与柔轮1的内壁相互压紧。柔轮为可产生较大弹性变形的薄壁齿轮,其内孔直径略小于波发生器的总长。波发生器是使柔轮产生可控弹性变形的构件。当波发生器装入柔轮后,迫使柔轮的剖面由原先的圆形变成椭圆形,其长轴两端附近的齿与刚轮的齿完全啮合,而短轴两端附近的齿则与刚轮完全脱开。周长上其他区段的齿处于啮合和脱离的过渡状态。当波发生器沿图示方向连续转动时,柔轮的变形不断改变,使柔轮与刚轮的啮合状态也不断改变,由. 啮入、啮合、啮出、脱开、再啮入……,周而复始地进行,从而实现柔轮相对刚轮沿波发生器H相反方向的缓慢旋转。 在传动过程中,波发生器转一周,柔轮上某点变形的循环次数称为波数,以n 表示。常用的是双波和三波两种。双波传动的柔轮应力较小,结构比较简单,易于获得大的传动比。故为目前应用最广的一种。 谐波齿轮传动的柔轮和刚轮的周节相同,但齿数不等,通常采用刚轮与柔轮齿数差等于波数,即 z2-z1=n 式中z2、z2--分别为刚轮与柔轮的齿数。 当刚轮固定、发生器主动、柔轮从动时,谐波齿轮传动的传动比为
第一级传动主传动及二级传动链第二级传动
一、 链轮Z1的设计计算:
1)材料选择: 2)采用45#调质处理表面硬度40-50HRC 3)分度圆直径:d=p/(sina180°/z)=(sina180°/25)=(mm) 4)齿顶圆直径:d a 5)d amax=d+=+×(查表:d1= 6)d amin=d+z1)p-d1=+25) × 7)取d a=(mm) 8)齿根圆直径d f: 9)d f=d-d1=分度圆弦齿高:h a 10)h amax=+z1)=+25)× 11)h amin=(p- d1)=× 12)取h a=(mm) 13)最大齿根距离:L x 14)L x=dcos(90°/z1)-d1=×cos(90°/25)=(mm) 15)齿侧凸缘直径:d g (查表:h为链的内连扳高度;h=) 16)d g=pcot(180°/z1) 17)取d g =131mm 18)齿侧圆弧半径:r e 19)r emax=(180+z12)=××(180+252)=(mm) 20)r emin=(2+z1)=××(2+25)=(mm) 21)滚子定位圆弧半径:r i 22)r imax=+ =×+×3√=(mm) 23)r imin==×=(mm) 24)滚子定位角:α 25)αmax=140°-90°/z1=140°-90°/25=° 26)αmin=120°-90°/z1=120°-90°/25=° 27)齿宽:b f1 (b1内链节内宽) 28)b f1==×=(mm) 29)齿侧倒角:b a 30)b a==×=(mm)
31)齿侧半径:r x 32)r x=p=(mm) 33)齿全宽:b fm (m排数) 34)b fm=(m-1)p t+ b f1=(1-1)p t+=(mm) 35)轴毂厚度:h(假设轴孔为50mm,<152mm范围内取值) 36)h=K+d k/6+=+ d k/6+×=(mm) 37)轮毂长度:l 38)l max==×=(mm) 39)l min==×=(mm) 40)轮毂直径:d h 41)d h=d k+2h=50+2×=(mm) 二、Z1对应轴的设计计算 1)材料选45#,Mp(空心轴) 2)按需用应力计算轴的直径:d (T=9550P/n=9550×30=(Nm),M=考虑链传动在轴上产生的 弯矩) =
第一章摩擦轮传动和带传动 一、填空 1.摩擦轮传动通过两轮所产生的来传递运动和动力;带传 动以带作为,利用带与带轮之间的或来传递运动和动力。 2.平带传动有传动、传动、传动和 传动等四种形式。 3.包角是指带与带轮接触弧所对的。对于平带传动,一般要求包角 α≥;对于V带传动,一般要求包角α≥。 4.V带是横截面或近似为的传动带,其工作面为。常用V带的主要类型有、、和等, 它们的楔角。均为。 5.带传动的张紧装置通常采用和两种方法。 6.V带传动中,带的线速度v将影响传动能力和带的使用寿命,所以v不宜太大或过 小,一般应限制在的范围内。 7.平带的开口传动用于两带轮轴线,且两带轮转向的场合; 平带的交叉传动用于两带轮轴线,且两带轮转向的场合。8.若带传动传动比i≠1,则带轮上的包角越大,带传动的能力越强。 9.V带传动安装带轮时,两带轮轴线应,两带轮相对应V形槽的对称平 面应,误差不允许超过。 二、判断 1.摩擦轮传动的主动轮工作表面上常粘上一层石棉、皮革、橡胶布、塑料或纤维等材料。( ) 2.摩擦轮传动可以方便地实现变向、变速等运动调整。( ) 3.带传动属于摩擦传动。( ) 4.一切摩擦传动的传动比都不准确。( ) 5.普通V带有7种型号,其传递功率能力,A型V带最小,Z型V带最大。( ) 6.在相同的条件下,普通V带的传动能力约为平带传动能力的3倍。( ) 7.V带和平带均利用带的底面与带轮之间的摩擦力来传递运动和动力。( ) 8.限制普通V带传动中带轮的最小基准直径的主要目的是:减小传动时V带的弯曲应力,以提高V带的使用寿命。( ) 9.V带传动使用张紧轮的目的是增大小带轮上的包角,从而增大张紧力。( ) 10.V带传动不能用于两轴线空间交错的传动场合。( ) 11.V带传动装置必须安装防护罩。( ) 12.i≠1的带传动,两带轮直径不变,中心距越大,小带轮上的包角就越大。( ) 13.带传动中,带的松边与紧边拉力不同,弹性变形有差异,在带与带轮接触区内会引起带相对带轮的弹性滑动,这种现象叫做“打滑”。( ) 14.考虑V带弯曲时横截面的变形,带轮的槽角 应小于V带横截面的楔角α。( )
机械基础测试卷(摩擦轮传动和带传动) 一、判断(每小题1分,共19分)满分:150分 1、整体式连杆既是构件也是零件。() 2、轴和滑动轴承组成高副,固定床身的螺栓和螺母组成螺旋副。() 3、运动副是联接,联接也就是运动副。() 4、构件都是可动的。() 5、自行车运动时,轮子运动,故轮上钢丝也在运动,钢丝是构件。() 6、工厂中生产的最小产吕是构件。() 7、机构的机构的构件之间必定具有确定的相对运动。() 8、一根轴上用键连接一个齿轮,它们组成一个构件。() 9、高副由于是点、线接触,故单位面积承载小,不易磨损。() 10、构件可以是单一整体,也可以是几个相互之间没有相对运动的物体组合。() 11、机构是用来传递运动和力的构件系统。() 12、多个构件组成多个运动副,一个构件组成一个运动副。() 13、火车在行驶中,车轮与铁轨构成了转动副。() 14、摩擦轮传动中,通常将轮面较软的轮作为从动轮,以防止从动轮的轮面遭受局部严重磨损。 () 15、摩擦轮传动的打滑是不可避免的。() 16、摩擦力由压紧力产生,因此摩擦轮传动的压紧力越大越好。() 17、两个相互压紧的轮子就能组成摩擦轮传动装置。() 18、两轴平行的摩擦轮传动,其旋转方向相同。() 19、摩擦力的方向总是与该物体滑动或滑动趋势的方向相反。() 二、选择(每小题2分,共44分) 1、车床上的主轴属于机器的() A动力部分B传动部分C工作部分D自动控制部分 2、以下不属于机器的是() A电动自行车B数控机床C飞机D千斤顶 3、下列关于构件概念的最正确表述是() A构件是工厂的制造单元B构件是机器的运动单元 C构件一定由若干零件组合而成D构件是机器的装配单元 4、如图螺旋传动机构是由_______________个构件组成。 A 2 B 3 C 4 D 5
一、谐波减速器简介 谐波齿轮减速器是利用行星齿轮传动原理发展起来的一种新型减速器。谐波齿轮传动(简称谐波传动),它是依靠柔性零件产生弹性机械波来传递动力和运动的一种行星齿轮传动。 二、传动原理 当波发生器为主动时,凸轮在柔轮内转动,就近使柔轮及薄壁轴承发生变形(可控的弹性变形),这时柔轮的齿就在变形的过程中进入(啮合)或退出(啮离)刚轮的齿间,在波发生器的长轴处处于完全啮合,而短轴方向的齿就处在完全的脱开。 波发生器通常成椭圆形的凸轮,将凸轮装入薄壁轴承内,再将它们装入柔轮内,此时柔轮由原来的圆形而变成椭圆形,椭圆长轴两端的柔轮与之配合的刚轮齿则处于完全啮合状态,即柔轮的外齿与刚轮的内齿沿齿高啮合。这是啮合区,一般有30%左右的齿处在啮合状态;椭圆短轴两端的柔轮齿与刚轮齿处于完全脱开状态,简称脱开;在波发生器长轴和短轴之问的柔轮齿,沿柔轮周长的不同区段内,有的逐渐退出刚轮齿间,处在半脱开状态,称之为啮出。 波发生器在柔轮内转动时,迫使柔轮产生连续的弹性变形,此时波发生器的连续转动,就使柔轮齿的啮入一啮合一啮出一脱开这四种状态循环往复不断地改变各自原来的啮合状态。这种现象称之错齿运动,正是这一错齿运动,作为减速器就可将输入的高速转动变为输出的低速转动。 对于双波发生器的谐波齿轮传动,当波发生器顺时针转动1/8周时,柔轮齿与刚轮齿就由原来的啮入状态而成啮合状态,而原来脱开状态就成为啮入状态。同样道理,啮出变为脱开,啮合变为啮出,这样柔轮相对刚轮转动(角位移)了1/4齿;同理,波发生器再转动1/8周时,重复上述过程,这时柔轮位移一个齿距。依此类推,波发生器相对刚轮转动一周时,柔轮相对刚轮的位移为两个齿距。 柔轮齿和刚轮齿在节圆处啮合过程就如同两个纯滚动(无滑动)的圆环一样,两者在任何瞬间,在节圆上转过的弧长必须相等。由于柔轮比刚轮在节圆周长上少了两个齿距,所以柔轮在啮合过程中,就必须相对刚轮转过两个齿距的角位移,这个角位移正是减速器输出轴的转动,从而实现了减速的目的。 三、谐波减速器应用 谐波减速器是一种新型的机械传动变速机构.与普通齿轮传动相比,具有体积小,重量轻,结构简单,传动比范围大(单级传动比为40~350,多级传动比可达1600-100000),传动效率高,传动精度高,承载能力强等特点,可广泛用于航空、航天、工业机器人、机床微量进给、通讯设备、纺织机械、化纤机械、造纸机械、差动机构、印刷机械、食品机械和医疗器械等领域。
链传动设计:101=z ,计功率1767.112=×=z z ,P p A d K =,A K 为工况系数,1K A =,KW 2.2P K A d ==P ,单排链条传递功率m Z d 0K K P P = ,查表5.4-4和5.4-5,齿数系数1K Z =,排数系数m K =1,1 110 P 0×==2.2kw 链节距p 根据KW 2.2P 0=,1N =1200r/min,查功率曲线,应在所选型号链的功率曲线下方附近(不超过直线)。结果为08A,节距p=12.7mm,初定中心距0a , i <4≥4 0min a 0.2z1(i+1)p 0.33z1(i-1)p p a 72max 0=,p a 15min 0=mm 2207.121818p a 0=×==,确定链条节数,a p )2z z (2z z p 2a L 0 212210p π?+++= 计算得p L =71.78,取整得p L =72,链条长度m 88.01000 7 .12721000 p L L p =×= = 计算(理论)中心距,a ,当21Z Z ≠时,a K a )z z 2L (p 21p '??=,查表得 a K =0.24559,实际中心距a,a a a '??=,'a )004.0002.0(a ?=?,链速s /m 01.110006012.7 20071100060z v 11=×××=×= p n ,有效圆周力N 288v 1000P F t ==,作用 在轴上的力F 水平或倾斜的传动,F K )2.1-1.1(F t A ≈A K 为工况系数,F=1.2×1×288=345.6N,链条标记:08A-1-72GB 1243-1997,1表示排数,72表示节数链轮的几何尺寸,滚子直径mm d 92.71=,mm p 7.12=
谐波减速器的原理及应用 一、谐波减速器简介 谐波齿轮减速器是利用行星齿轮传动原理发展起来的一种新型减速器。谐波齿轮传动(简称谐波传动),它是依靠柔性零件产生弹性机械波来传递动力和运动的一种行星齿轮传动。 二、传动原理 当波发生器为主动时,凸轮在柔轮内转动,就近使柔轮及薄壁轴承发生变形(可控的弹性变形),这时柔轮的齿就在变形的过程中进入(啮合)或退出(啮离)刚轮的齿间,在波发生器的长轴处处于完全啮合,而短轴方向的齿就处在完全的脱开。 波发生器通常成椭圆形的凸轮,将凸轮装入薄壁轴承内,再将它们装入柔轮内。此时柔轮由原来的圆形而变成椭圆形,椭圆长轴两端的柔轮与之配合的刚轮齿则处于完全啮合状态,即柔轮的外齿与刚轮的内齿沿齿高啮合。这是啮合区,一般有30%左右的齿处在啮合状态;椭圆短轴两端的柔轮齿与刚轮齿处于完全脱开状态,简称脱开;在波发生器长轴和短轴之间的柔轮齿,沿柔轮周长的不同区段内,有的逐渐退出刚轮齿间,处在半脱开状态,称之为啮出。 波发生器在柔轮内转动时,迫使柔轮产生连续的弹性变形,此时波发生器的连续转动,就使柔轮齿的啮入—啮合—啮出—脱开这四种状态循环往复不断地改变各自原来的啮合状态。这种现象称之错齿运动,正是这一错齿运动,作为减速器就可将输入的高速转动变为输出的低速转动。 对于双波发生器的谐波齿轮传动,当波发生器顺时针转动1/8周时,柔轮齿与刚轮齿就由原来的啮入状态而成啮合状态,而原来脱开状态就成为啮入状态。同样道理,啮出变为脱开,啮合变为啮出,这样柔轮相对刚轮转动(角位移)了1/4齿;同理,波发生器再转动1/8周时,重复上述过程,这时柔轮位移一个齿距。依此类推,波发生器相对刚轮转动一周时,柔轮相对刚轮的位移为两个齿距。 柔轮齿和刚轮齿在节圆处啮合过程就如同两个纯滚动(无滑动)的圆环一样,两者在任何瞬间,在节圆上转过的弧长必须相等。由于柔轮比刚轮在节圆周长上少了两个齿距,所以柔轮在啮合过程中,就必须相对刚轮转过两个齿距的角位移,这个角位移正是减速器输出轴的转动,从而实现了减速的目的。
链传动的设计步骤方法示例: 1.选择链轮齿数和材料 取小齿轮齿数119Z =,大齿轮的齿数为2121938Z i Z =?=?= 材料选择40钢,热处理:淬火、回火。 2.确定计算功率 由表9-6查得 1.1A K =,由图9-13查得 1.35z K =,单排链,则计算功率为: 3 1.1 1.35 5.137.62ca A Z P K K P kW ==??=。 3.选择链条型号和节距 根据7.62ca P kW =及3134.38/min n n r ==查图9-11,可选20A-1。查表9-1,链条节距为31.75p mm =。 4.计算链节数和中心距 初选中心距0(30~50)(30~50)31.75952.5~1587.5a p mm ==?=。取 01000a mm =。相应得链长节数为20122100 2 ()91.7822P a Z Z Z Z P L P a π+-=++≈,取链长节数92P L =节。查表9-7得到中心距计算系数10.24883f =,则链传动的最大中心中心距为:[]1122()1003P a f P L Z Z mm =-+≈。 5.计算链速v ,确定润滑方式 11134.381931.75 1.35/601000601000 n Z P v m s ??===?? 由 1.35/v m s =和链号20A -1,查图9-14可知应采用油池润滑或油盘飞溅润滑。 6.计算压轴力 有效圆周力为: 5.13 1000100038001.35 P P F N v ==? ≈ 链轮水平布置时的压轴力系数 1.15,Fp K =,则压轴力为 1.1538004370P Fp e F K F N ≈=?≈。 7.链轮的结构设计 小直径的链轮一般做成整体式;中等尺寸的链轮多做成孔板式,为便于搬运、装卡和减重,在辐板上开孔;大直径的链轮可做成组合式,常可将齿
1、链传动定义与特点 链传动是通过链条将具有特殊齿形的主动链轮的运动和动力传 递到具有特殊齿形的从动链轮的一种传动方式。链传动与带传动相比,无弹性滑动和打滑现象,平均传动比准确,工作可靠,效率高;传递功率大,过载能力强,相同工况下的传动尺寸小;所需张紧力小,作用于轴上的压力小;能在高温、潮湿、多尘、有污染等恶劣 环境中工作。但是链传动的缺点主要有:仅能用于两平行轴间的传动;成本高,易磨损,易伸长,传动平稳性差,运转时会产生附加 动载荷、振动、冲击和噪声,不宜用在急速反向的传动中。 2、链传动应用范围 链传动适用于两轴相距较远,工作条件恶劣等,如农业机械、 建筑机械、石油机械、采矿、起重、金属切削机床、摩托车、自行 车等。 3、链传动生活中应用实例 3.1 自行车的链传动 自行车采用了链传动,利用链条与链轮之间的啮合力来传递运 动和动力。自行车是利用链传动来传递运动和动力的,链传动由主 动链轮(安装在脚踏板的中轴上),从动链轮(又称后飞轮,安装 在自行车的后轴上)和中间挠性件链条组成,链条的链节和链轮的 轮齿相啮合。在图1传动中,设主动链轮的齿数z1,转速为n1,后 飞轮的齿数为z2,转速为n2,主动链轮每转过一个齿,链条移动一 个链节,从动链轮被链条带动也转过一个齿,即在相同时间内主动 链轮转过的齿数等于从动链轮转过的齿数,则 n1·z1 =n2·z2,即 n 1n2=z 2z 1。链传动的传动比即主、从动链轮的转速之比,等于主、从动链轮齿数之反比。通常链传动主动轮的齿数大于从动轮的 齿数,即z1>z2,则传动比小于1,所以采用链传动的自行车是增速的。例28英寸的男式自行车,主动链轮的齿数为47,后飞轮齿数 为21,骑车人蹬一圈,主动链轮转一圈,飞轮转2.5圈,后轮也转2.5圈,自行车可向前进 5.5米左右,所以骑车与步行相比快多了。 在自行车的前链轮上加两个左右曲柄,脚踏的切向力改进成转 动力矩,两脚的摆动幅度大一些,转动力矩也大,用脚蹬踏更有利 于自行车转动。所以骑自行车既省力又快捷。 3.2番茄浮洗机
工业机器人的RV减速器和谐波减速器有什么区别 作为工业机器人核心零部件的精密减速器,与通用减速器相比,机器人用减速器要求具有传动链短、体积小、功率大、质量轻和易于控制等特点。 大量应用在关节型机器人上的减速器主要有两类:RV减速器和谐波减速器 1 RV减速器和谐波减速器的原理和优劣势 RV减速器:用于转矩大的机器人腿部腰部和肘部三个关节,负载大的工业机器人,一二三轴都是用RV。相比谐波减速机,RV减速机的关键在于加工工艺和装配工艺。RV减速机具有更高的疲劳强度、刚度和寿命,不像谐波传动那样随着使用时间增长,运动精度会显著降低,其缺点是重量重,外形尺寸较大。 ▲RV-E型减速器 谐波减速器:用于负载小的工业机器人或大型机器人末端几个轴,谐波减速器是谐波传动装置的一种,谐波传动装置包括谐波加速器和谐波减速器。谐波减速器主要包括:刚轮、柔轮、轴承和波发生器三者,四者缺一不可。其中,刚轮的齿数略大于柔轮的齿数。谐波减速机用于小型机器人特点是体积小、重量轻、承载能力大、运动精度高,单级传动比大。
▲谐波减速器 两者都是少齿差啮合,不同的是谐波里的一种关键齿轮是柔性的,它需要反复的高速变形,所以它比较脆弱,承载力和寿命都有限。RV通常是用摆线针轮,谐波以前都是用渐开线齿形,现在有部分厂家使用了双圆弧齿形,这种齿形比渐开线先进很多。 减速器的两巨头是Nabtesco和Hamonica Drive,他们几乎垄断了全球的机器人用减速器。这两种减速器都是微米级的加工精度,光这一条在量产阶段可靠性高就很难了,更别说几千转的高速运转,而且还要高寿命。 谐波减速器由“柔轮、波发生器、刚轮、轴承”这四个基本部件构成。 柔轮的外径略小于刚轮的内径,通常柔轮比刚轮少2个齿。波发生器的椭圆型形状决定了柔轮和刚轮的齿接触点分布在介于椭圆中心的两个对立面。波发生器转动的过程中,柔轮和刚轮齿接触部分开始啮合。波发生器每正时针旋转180°,柔轮就相当于刚轮逆时针旋转1个齿数差。在180°对称的两处,全部齿数的30%以上同时啮合,这也造就了其高转矩传送。 相比谐波减速器,RV传动是新兴起的一种传动,它是在传统针摆行星传动的基础上发展出来的,不仅克服了一般针摆传动的缺点,还具有体积小、重量轻、传动比范围大、寿命长、精度保持稳定、效率高、传动平稳等一系列优点。
工业机器人核心部件-谐波减速器 作者:csuzhm2009-03-24 00:18 星期二晴
机器人驱动系统要求传动系统间隙小、刚度大、输出扭矩高以及减速比大,常用的减速机构有:1)RV减速机构; 2)谐波减速机械; 3)摆线针轮减速机构; 4)行星齿轮减速机械; 5)无侧隙减速机构; 6)蜗轮减速机构; 7)滚珠丝杠机构; 8)金属带/齿形减速机构; 9)球减速机构。 其中谐波减速器广泛应用于小型的六轴搬运及装配机械手中,下面介绍其工作原理。
以下内容摘自百度百科(稍有修改): 谐波齿轮减速器是利用行星齿轮传动原理发展起来的一种新型减速器。谐波齿轮传动(简称谐波传动),它是依靠柔性零件产生弹性机械波来传递动力和运动的一种行星齿轮传动。 (一)传动原理 它主要由三个基本构件组成: (1)带有内齿圈的刚性齿轮(刚轮)2,它相当于行星系中的中心轮; (2)带有外齿圈的柔性齿轮(柔轮)1,它相当于行星齿轮; (3)波发生器H,它相当于行星架。 作为减速器使用,通常采用波发生器主动、刚轮固定、柔轮输出形式。 波发生器H是一个杆状部件,其两端装有滚动轴承构成滚轮,与柔轮1的内壁相互压紧。柔轮为可产生较大弹性变形的薄壁齿轮,其内孔直径略小于波发生器的总长。波发生器是使柔轮产生可控弹性变形的构件。当波发生器装入柔轮后,迫使柔轮的剖面由原先的圆形变成椭圆形,其长轴两端附近的齿与刚轮的齿完全啮合,而短轴两端附近的齿则与刚轮完全脱开。周长上其他区段的齿处于啮合和脱离的过渡状态。当波发生器沿图示方向连续转动时,柔轮的变形不断改变,使柔轮与刚轮的啮合状态也不断改变,由