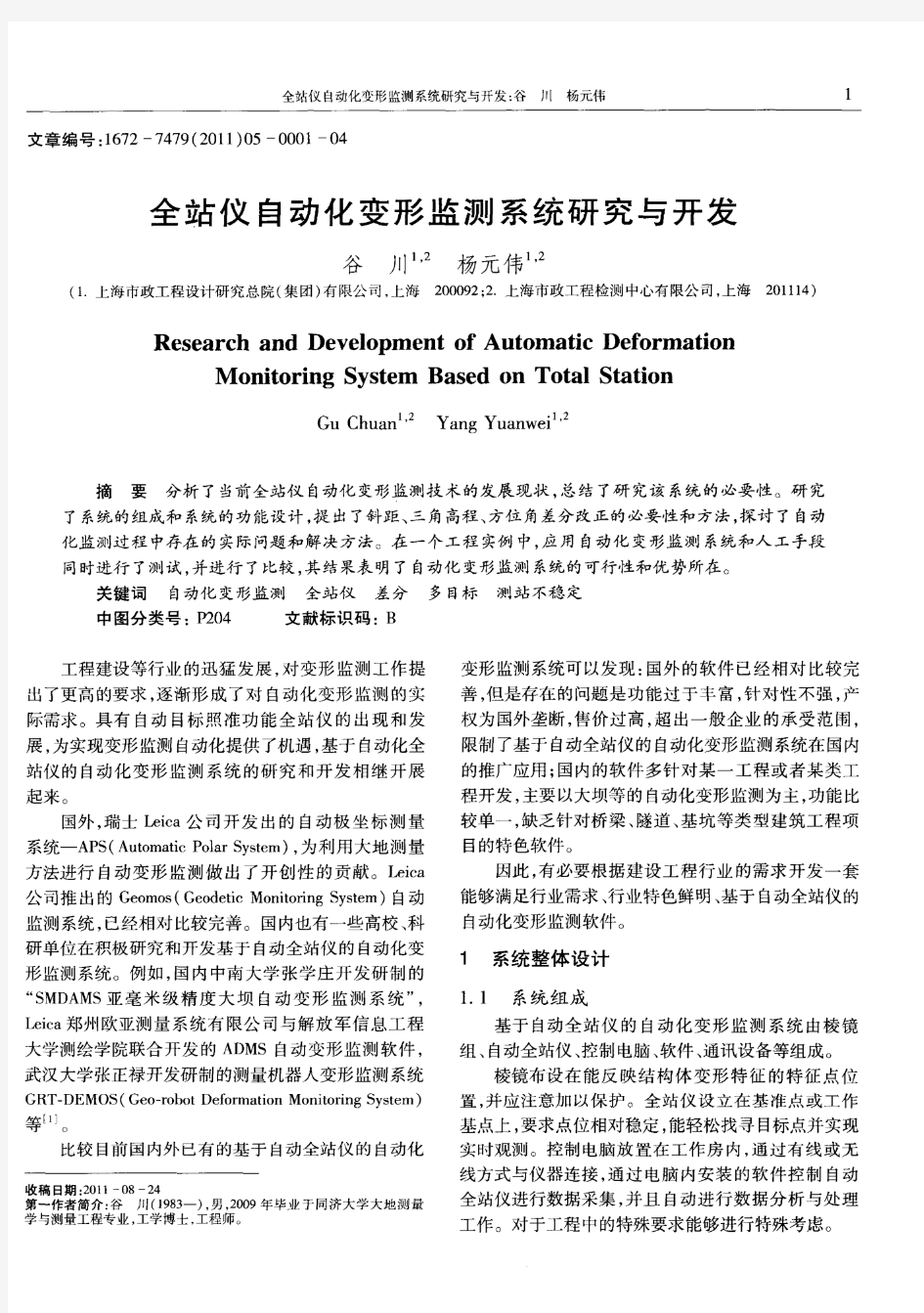
富水土质隧道围岩变形监测及其应用 (中铁建某集团山东) 摘要本文以新松树湾隧道为例,通过内空收敛和围岩内部位移的量测,分析了富水土质隧道的围岩变形规律,对类似工程施工有一定的参考价值。 关键词富水土质隧道围岩变形 随着西部大开发的进行,对富水黄土地区的隧道施工参数的测试和研究具有重要的意义。本文以新松树湾隧道为例进行探讨。 1 工程概况 新松树湾隧道为既有松树湾隧道复线的单线铁路隧道,位于甘肃省陇西县境内大营梁,全长1726m,复合衬砌。大营梁为黄土梁峁区,该隧道范围地层为上更新统风积粘质黄土和下、中更新统冲、洪积杂色砂粘土。粘质黄土为淡黄色、棕黄色,厚0—20m,土质较匀,具孔隙及虫孔,局部含白色钙丝及钙质斑点,半干硬至硬塑,II级普通土,II类围岩,σ0=150kPa,具II级自重湿陷性。杂色砂粘土主要表现为强崩解性,一定的膨胀性及含有盐碱成分。II级普通土,II类围岩,σ0=200--250kPa (局部软塑—流塑状,I类松土,I类围岩,σ 0=100--120kPa)。大营梁地带年平均降水量513.3mm,隧道三面汇水,地下水较发育,系大气降水补给。地下水主要有上层滞水和裂隙水,前者一般埋深15—30m之间。多见有泉和渗水出露,水量相对较大,隧道内日渗水量22--18m3/d.地下水对混凝土具弱侵蚀性。经调查,既有松树湾隧道(1960年建成)各地段有不同程度的渗漏水现象。隧道渗水主要通过拱顶、边墙接缝、排水沟孔、墙角部位渗出,水对普通硅酸盐水泥有侵蚀性。因此,新松树湾隧道采用曲墙有仰拱衬砌,除进口端I类围岩模筑衬砌,余均采用复合衬砌。初期支护为1榀/m钢格栅+钢筋网+钢筋锚杆喷锚。在施工中采用新奥法分三台阶开挖。 2 量测项目 根据现场情况,选取了八个量测断面进行内空收敛的测试;还选取了两个断面进行围岩内部位移测试。内空收敛在开挖后马上埋设测点,在12小时内测取初始读数,采用煤炭科学研究院生产的JSS30型数显收敛计量测。观测断面里程分别为1#面——DK1601-8.4,2#面——DK1601+6.4,3#面——DK1601+21.9,4#面——DK1601+36.1,5#面——DK1601+46.5,6#面——DK1601+86.5,7#面——DK1601+122.5,8#面——DK1601+172.7,其中7#、8#面进行围岩内部位移测试(图1),每个断面各有六条内空收敛测线,即1-2、1-3、1-4、1-5、2-3、4-5。围岩内部位移采用煤炭科学研究院生产的杆式多点位移计进行测量,这种位移计使用膨胀木锚头,具有安装简单,可靠等特点,每个钻孔可分别测量埋深1M,2M,4M处的围岩与洞壁之间的相对位移。 Fig.1 Arrangement of the c onvergences and internal displacement of the wall rock 3 内空收敛量测 通过测量结果计算各测线收敛累计值,同时计算出各测线的位移速率。 隧道周边收敛按下式计算: R R U i i - = 收敛速率按下式计算:
自动化变形监测系统在地铁监测中的应用 摘要:随着我国城市化进程的不断加快,地铁已成为城市公共交通建设的重要 组成部分。由于地铁自身运营及临近地铁相关工程建设对地铁结构产生动态影响,如何对隧道结构及轨道开展自动化监测尤为重要。本文结合沈阳地铁二号线青年 公园站~青年大街站区间自动化监测项目来详细说明自动化监测技术在地铁变形 监测中的具体应用。 键词:轨道交通;地铁;自动化监测系统;变形监测 1、工程实例概况介绍 本基坑工程处于沈阳地铁二号线左线控制范围内,基坑结构边线距离地铁左 线结构边线距离约12米,基坑结构地下四层,深度约22米。该基坑的施工将对 地铁左线结构产生明显的影响,地铁左线结构将产生向上隆起和向基坑侧的水平 位移变形。为保证地铁结构的绝对安全,对运营的左线地铁结构采用基于高精度 智能型全站仪的自动化变形监测系统,来实时地监测左线地铁结构的三维变形。 2、针对运营的左线地铁结构采取的监测方法 采用基于高精度智能型全站仪的自动化变形监测系统,实时监测左线地铁结 构的三维变形。为确保监测数据的可靠,左线在布设自动化监测系统的同时,布 设人工监测点,人工监测与自动化监测系统相互校核。 3、使用的仪器设备及软件 瑞士徕卡TM50或TS30自动全站仪(0.5″,0.6mm+1ppm),武汉大学测绘 学院“GeoRDMAS”软件,Leica L型棱镜。 3.1 自动化变形监测系统简介 自动变形监测系统是用于控制测量机器人进行自动变形监测以及对监测过程 中所采集的数据进行管理与处理的软件,该系统将自动测量、实时显示测量成果、实时显示变形趋势等智能化的功能合为一体(详见图3-1)。 3.2 自动化变形监测系统优势 自动化变形监测系统使用的是全自动跟踪全站仪,它可以代替人完成对观测 目标的自动搜索、照准、跟踪、识别并且获取观测目标的距离、角度等数据,而 且精度高、可连续作业。由于地铁隧道内观测环境特殊性不同,传统的人工监测 方法缺乏同时性,而且作业效率低、观测周期长,仅适用于施工环境复杂、隧道 结构相对稳定不需要长期进行监测的工程。 4.自动化监测项目实施 4.1自动化监测内容 1)道床沉隆及水平位移监测; 2)结构侧壁沉隆及水平位移监测; 3)道床(轨道)差异沉降监测; 4)现场安全巡视。 4.2监测断面布设及点位埋设 自动化监测区间为约100米,70米施工基坑范围每10米布设1处监测断面,两侧各外延30米,15米一个断面,各设2个断面,共设12个断面,每个断面布设4个监测点,道床2个,侧壁2个(详见断面监测点布置示意图4-1、监测断 面位置示意图4-2)。 4.3自动化数据采集过程
绿园污水处理厂 顶管施工基坑监测方案 编制: 审核: 审定: 二0一五年七月
目录 1.项目概述 (2) 1.1概况 (2) 1.2监测项目 (2) 2.第三方监测原则及技术规程 (2) 2.1监测原则及目的 (2) 2.2技术规程 (2) 3.监测实施程序 (3) 4.监测实施 (3) 4.1基坑围护结构顶部沉降监测 (3) 4.1.1水准控制网的设置 (3) 4.1.2监测点的埋设原则 (5) 4.1.3监测点的安设方法 (5) 4.1.4监测方法及精度控制 (6) 4.1.5沉降观测数据分析及成果表述 (7) 4.2基坑围护结构顶部水平位移监测 (7) 4.2.1水位位移监测控制网的布设形式 (7) 4.2.2水平位移监测控制网布设原则 (8) 4.2.3水平位移测点布置原则 (8) 4.2.4水平位移测点的埋设技术要求 (8) 4.2.5观测技术方法及精度控制 (9) 4.2.6观测数据分析及成果概述 (12) 4.3基坑自身监测频率 (13) 5报警的处理方法 (14) 5.1报警值的设定 (15) 5.2报警的处理办法 (15) 6实施组织计划 (14) 7本工程拟投入的主要仪器设备表 (15) 8人员组织实施 (16)
.项目概述 1.1概况 受0000000厂委托,00000000承担绿园污水处理厂配套管网基坑沉降变形观测工程,管道位于:东湖大街、滏阳路、朝阳大街、长安路、和平路、等路段,管线总长度约12263米,共计92个深基坑,我公司在基坑开挖至回填土完成期间,对基坑坡顶进行水平位移和沉降变形监测。 1.2监测项目 本方案监测项目有:基坑围护结构顶部沉降、水平位移监测。 2.第三方监测原则及技术规程 2.1监测原则及目的 在施工方对基坑支护结构进行实时监测前提下,我方监测在对施工方监测进行校核的基础上,独立地进行监测。 我方遵照委托方提出的要求,在基坑施工期间对基坑支护进行高精度监测,并从岩土工程专业的角度对监测数据、信息进行及时分析,向业主提供监测变形的情况,对异常情况及时提供建议,为施工安全和施工方案优化提供科学依据。 2.2技术规程 《建筑基坑工程监测技术规范》(GB50497-2009) 《建筑变形测量规范》(JGJ8-2007) 《国家一二等水准测量规范》(GB/T12897-2006) 《工程测量规范》(GB50026-2007) 《建筑地基基础设计规范》(GB 50007-2011) 《岩土工程勘察规范》(GB 20021-2001,2009版) 《建筑基坑工程监测技术规范》(GB50497-2009)
摘要:为了解决工业设备高精定向测量问题,诸如:实验室内北向基准建立和子午线标定、惯导测试设备 引北,以及转台轴向定向、精度测试、零位置偏差、和射频天线定向、发射场定向等问题,笔者提出了经纬 仪(或全站仪)同步对向观测方法,并被我国大地天文测量规范中所采用。此方法多次在设备精密定向测量 项目中得到成功运用。实测结果表明,此方法是实现高精定向非常有效实用的方法;基本消除了对中误差、 调焦误差、十字丝偏差对定向误差的影响。笔者提出的高精度定向方法,亦可应用于高精度隧道和矿井贯通 测量。 关键词:同步对向观测法定向测量北向基准测定子午线标定设备引北工业测量 1 引言 所谓定向测量,就是测定目标方向的方位角,包括方位的传递。方位有相对的,也有要求相对于真北的绝对方位。对于设备定向,诸如:惯性导航试验设备、隧道挖掘盾构设备、钻探设备等,简单的说就是测定和放样设备目标面的法线方向的方位角。常规测量技术常常用于测量目标点的地理坐标,对于方向则通过两个点的坐标来计算。而测量工业设备的方向,则因为场地和设备参考面的限制,缺乏有效的高精度的测量方法。为了检测设备,一般需要在室内建立一个方位基准,基准精度常常要求高达角秒级。工业设备,诸如:惯导设备测试转台,常常位于室内,把方位传递到室内,如果测量仪器对中误差哪怕只有0.1mm,则5m的室内距离内引起方向误差高达4″。即便采用强制对中措施,这样需要埋设仪器观测台,既费工,也存在对中误差,而且传统观测办法在试验室内短距离内还存在相当大的调焦误差。 我国军用天文测量规范[1]附加了子午线标定的一种定向方法,并规定了把经纬仪作为准直平行光管目标观测的方法,这是一种双台经纬仪非实时同步的对向观测方法,尚存在一定缺陷: 1)在几个测回观测过程中,用一个盘位的经纬仪作准直光管目标,目标的气象误差和十字丝偏差影响很大; 2)观测了多个测回后仍需要按平均读盘位置再照准,失去了多测回观测意义; 3)由于方位传递角度是独立观测的,另外存在粗差时,不容易被发现,故此不能有效评定和检验方位传递最终目标的方向精度。 笔者在制定大地天文测量规范[2]国家标准时,对高精度定向技术进行了研究,通过主持完成的子午线标定项目[3],把所研究的双台经纬仪高精度同步对向观测技术应用于室内子午线标定,并纳入了大地天文测量规范国家标准。 国防工业设备定向方面,诸如:惯性导航设备需要建立室内北向基准,惯导试验转台的零方向或轴向需要指向一定的方向;射频仿真试验室的天线(高达几百和上千个)需要分布在球形阵面上,并要求指向球心,有些需要真北方位,球心转台零方向需要对准球形阵面零位置;惯导试验产品需要确定真北方向;惯导试验转台需要检测转动的精度;导弹和航天器发射需要精密定位和定向。随着我国国防及载人航天航空事业的发展,迫切需要高精度的定向测量技术支持。 随着隧道挖掘机的出现,隧道开挖段有时超过规范距离,近年来,在我国出现了超过20km单向贯通的特长水利隧道开挖段,超出了标准的要求,这对于隧道控制网建立、贯通测量精度提出了很高要求;矿井隧道通常很长,传统的贯通测量常常需要加测陀螺方位,以控制方向误差;而采用陀螺定向的联系测量速度慢、设备昂贵、可靠性常常无法检验。应用经纬仪同步对向观测技术,可以提高方向精度,从而可有条件地取消陀螺方向控制。 2 同步对向观测方法 2.1 基本原理和方法 利于平行光管原理,把经纬仪(或全站仪,下同)对无穷远调焦,以照亮的经纬仪十字丝作为观测目标,两台经纬仪分别在盘左右位置实时同步进行互相照准观测读数。 此法优点是:当观测一个夹角时可控制两个方向目标成像在无穷远,无需调焦,因此不含调焦误差;由于分别度盘左右观测,所以可以基本消除十字丝偏差影响。. 此方法过程中应注意一下几点: a)起始和最终目标最好采用平面镜,采用野外观测标志时,尽量使调焦在无穷远处; b)事先通过调焦观察,尽量使两台仪器对准望远镜中心区域,以避免两台仪器对准望远镜边缘时,
自动化变形监测技术的研发与应用 摘要:在各项工程的变形自动化监测方面,测量机器人正逐步成为首选的自动化测量技术设备。与传统人工测量手段相比,测量机器人以它的高精度、高稳定性和高可靠性等优越性,在变形监测中发挥越来越重要的作用。自动化变形监测能够在无人值守情况下完成变形监测,完全能够取代人工测量,同时还为我们提供了可视化的动态变形信息,做到了信息化施工,也避免了工程事故的发生。 关键词:自动变形监测;传统人工测量;自动全站仪;可视化 The development and application of automatic deformation monitoring Subtract:In the project of the automation deformation monitoring, measuring robot is gradually becoming the preferred automation measuring technology equipment.The system is simple operation, high automation level. Compared with the traditional artificial measurement methods, measuring robot to its high precision, high stability and high reliability etc- advantages in deformation monitoring playing more and more important- role. When no one guards,it can complete deformation monitoring and completely replace artificial measurement. At the same time, it also provides us with a visualization of the dynamic deformation information. We can do the informatization construction and avoid engineering accident. Key words: automatic deformation surveying ; The traditional artificial measurement; automatic total station; visualization 1 引言 传统的工程变形监测测量是靠人工实地测量,工作量大,测出的各项参数存在一定的系统误差和人工误差,还要受天气和现场条件状况的影响,资料的整理与分析周期也很长,不能及时地发现工程隐患。为了解决这些问题,测量机器人开始进入人们的视野。测量机器人通过CCD影像传感器和其它传感器对测量的“目标”进行识别,迅速做出分析、判断与推理,实现自我控制,并自动完成照准、读数等操作。自动化变形监测系统是采用测量机器人对各种工程进行自动化安全监测和数据处理的通用软件系统,可对各监测点进行实时监控、自动测量和变形过程显示等功能。国内外自动化变形监测系统的研究和开发也取得一定成果。例如,国内武汉大学张正禄开发研制的测量机器人变形监测系统等,国外德国Leica公司推出的Geomos(Geodetic Monitoring System)自动监测系统,已经相对比较完善。 2 系统整体设计 (1)工程管理:工程中保存着该变形监测项目在监测过程中的相关数据。 (2)系统初始化:实现各项通讯参数设置以及测量机器人的初始化设置等。 (3)学习测量:对所需观测的目标点进行首次人工测量,获取目标点概略空间位置信息,以便日后计算机控制测量机器人自动搜寻定位目标点,完成自动测量。
全站仪对向观测法三角高程在高速公路施工测量中的 研究与应用 李瑞国 中交二航局福州分公司测试中心 摘要:全站仪三角高程测量可以不受地形限制,在地形起伏大的山区,无论是建立高程测量控制网或是日常施工测量放样,全站仪三角高程都具有几何水准测量无可比拟的优越性。本文从三角高程测量原理这一方面展开,根据误差传播定律,对三角高程测量误差来源及其测量精度进行分析,阐述在一定范围内合理利用全站仪对向观测三角高程测量,可以达到三、四等几何水准测量的要求,并能将其良好的运用于高速公路施工测量的工程实践中。 关键词:全站仪对向观测法三角高程高速公路研究与应用 1 引言 由于传统的几何水准测量确定地面点的高程精度高,已普遍应用于土木工程测量实践有一个多世纪之久,但随着高精度的全站仪的普及应用,在越来越多的工程实践中,全站仪已经展现出其测量的高精度性与便捷快速性。尤其在地形起伏较大、复杂多变的山区,几何水准测量受到限制,使用全站仪三角高程测量,可以节省大量时间,大量减少测量人员的劳动强度,提高作业效率,具有极强的可行性与优越性。全站仪进行三角高程测量时有单向观测、对向观测、中间点观测法等不同方法,不同的观测方法可以满足不同的高程测量的精度要求,本文从笔者在高速公路施工测量方面的日常工作出发,阐述全站仪对向观测法三角高程在高速公路施工测量中的研究与应用。 图1 全站仪三角高程测量原理图
2 全站仪对向观测法三角高程的原理 全站仪对向观测法三角高程原理与单向观测法三角高程原理相似,单向观测只需进行往测,而对向观测则需要进行往返观测。全站仪单向三角高程测量如图1所示,其中A 点为已知高程点,B 点为待测高程点,欲在A 、B 两点之间采用三角高程测量的方法测定高差AB h ,在A 点安置全站仪,测量其仪器高i ,在B 点安置棱镜,测量其棱镜高为v ,由A 点的仪器测量A 、B 两点间的斜距S 与A 至B 点的垂直角α。一般地,如果A 、B 两点距离较远时,必须考虑地球曲率和大气折光对其所测高差的影响,二者对高程测量的联合影响称为“两差影响”,也称为球气差。根据图1中A 、B 两点间的几何关系可得其两者间高差AB h 计算公式为: r c v i S h AB -+-+?=αsin ……式(1) 式中:AB h 为A 、B 两点的高差,S 为斜距,α为垂直角,c 为地球地球曲率改正数,r 为大气折光系数改正数。 大气折光与地球曲率两者的联合影响为: ααα22222 2cos 21cos 2cos 2S R K R KS R S r c f -=-=-=……式(2) 式中:f 为大气折光与地球曲率两者联合影响,R 为地球半径,K 为大气折光系数,其他符号意义同前。 因此,将式(2)代入式(1)知全站仪单向三角高程测量的计算公式可转换为: αα22 cos 21sin S R K v i S h AB -+ -+?=…..式(3) 因此,当使用全站仪进行对向观测时,由式(3)可得直觇公式为: 往往往往往往往αα22 cos 21sin S R K v i S h AB -+-+?=……式(4) 返觇公式为: 返返返返返返返αα22 cos 21sin S R K v i S h BA -+ -+?=…….式(5) 式中:往S 、返S 、往α、返α分别为往返观测的斜距和垂直角;往i 、返i 、往v 、返v 分别为往返观测的仪器高和棱镜高;往K 、返K 分别为往返观测的大气折光系数。 外业操作中,当使用全站仪进行对向观测时,可认为往返观测是在同一时间段进行,故而其气象条 件应是相同的,因此往返观测时大气折光系数近似相同,即返往K K ≈;而往往 α22 cos ?S 与
地铁隧道结构变形监测数据管理系统的设计与实现 摘要:探讨开发地铁隧道结构变形监测系统的必要性与紧迫性。以VisualBasic编程语言和ACCESS数据库为工具, 应用先进的数据库管理技术设计开发地铁隧道结构变形监测数据管理系统。系统程序采用模块化结构,具有直接与外业观测电子手簿连接下传原始观测资料、预处理和数据库管理等功能,实现了测量内外业的一体化。系统结构合理、易于维护、利于后继开发,提高监测数据处理的效率、可靠性以及监测数据反馈的及时性,值得类似工程的借鉴。关键词:地铁隧道;变形监测;管理系统 随着经济的发展,越来越多的城市开始兴建地铁工程。地铁隧道建造在地质复杂、道路狭窄、地下管线密集、交通繁忙的闹市中心,其安全问题不容忽视。无论在施工期还是在运营期都要对其结构进行变形监测,以确保主体结构和周边环境安全。地铁隧道结构变形监测内容需根据地铁
隧道结构设计、国家相关规范和类似工程的变形监测以及当前地铁所处阶段来确定,由规范[1]与文献[2]知,运营期的地铁隧道结构变形监测内容主要包括区间隧道沉降、隧道与地下车站沉降差异、区间隧道水平位移、隧道相对于地下车站水平位移和断面收敛变形等监测。它是一项长期性的工作,其特点是监测项目多、线路长、测点多、测期频和数据量大,给监测数据处理、分析和资料管理带来了繁琐的工作,该项工作目前仍以手工为主,效率较低,不能及时快速地反馈监测信息。因此,有必要开发一套高效、使用方便的变形监测数据管理系统,实现对监测数据的科学管理及快速分析处理。现阶段国内出现了较多的用于地铁施工期的监测信息管理系统[3-4],这些系统虽然功能比较齐全、运行效率较高,能够很好地满足地铁施工期监测需要,但它主要应用于信息化施工,与运营期地铁隧道结构变形监测无论是在内容还是在目的上都有着很大的区别和局限性。而现在国外研究的多为自动化监测系统[5-6],也不适用于目前国内自动化程度较低的地铁隧道监测。此外,能够用于运营期并符合当前国内地铁隧道结构监测实际的监测数据管理系统还较为少见。因此,随着国内建成地铁的逐渐增多,开发用于运营期地铁的变形监测数据管理系统变得越来越迫切。为此,根据运营期地铁隧道结构变形监测内容[1-2]和特点,以isualBasic作为开发工具[7],应用先进的数据库管理技术[8],以目前较为流行的
浅谈变形监测平面控制网的建立与精度分析 发表时间:2019-09-12T11:49:43.813Z 来源:《基层建设》2019年第17期作者:岳小勇[导读] 摘要:如今在人类生活和生产建设中,出现了越来越多的山体、基坑塌陷等的灾害。 青海地理信息产业发展有限公司青海西宁摘要:如今在人类生活和生产建设中,出现了越来越多的山体、基坑塌陷等的灾害。由于多种因素的影响,在一定的时间内发生某种程度的变形,这种变形在一定范围内往往是允许的,但当其超出一定值时,就很可能会变成灾害,而要预防这些灾害的发生,就必须进行变形监测,分析变形产生的原因,总结变形发展的规律。本文主要就变形监测平面控制网的建立与精度进行分析,以供参考和借鉴。 关键字:变形监测;平面控制网;精度;分析引言 变形是自然界历来普遍存在的现象,它是指变形体在各种外力作用下,其形状、大小及位置在时间域和空间域中发生变化。所谓变形监测,就是利用测量仪器与专用仪器和方法对变形体的变形现象进行监视观测的工作,其任务是在确定各种荷载和外力作用下,变形体的形状、大小及位置变化的空间状态和时间特征。 1变形监测概述 1.1变形监测的概念 变形监测就是利用专用的仪器和方法对变形体的变形现象进行持续观测、对变形体变形形态进行分析和变形体变形的发展态势进行预测等的各项工作,其任务是确定在各种荷载和外力作用下,变形体的形状、大小及位置变化的空间状态和时间特征。在精密工程测量中,最具代表性的变形体有大坝、桥梁、高层建筑物、边坡、隧道以及地铁等。变形监测的内容应根据变形体的性质和地基情况决定,对水利工程建筑物主要观测水平位移、垂直位移、渗透及裂缝观测,这些内容称为外部观测。为了了解建筑物内部结构的情况,还应对混凝土应力、钢筋应力、温度等进行观测,这些内容常称为内部观测,在进行变形监测数据处理时,特别是对变形原因做物理解释时,必须将内、外观测资料结合起来进行分析。 1.2变形网的特点 第一,工程测量控制网建立时,保证网点之间的相对精度至关重要,而变形监测网的布网目的是为了测定网点的变形,网点之间的相对精度不是最重要的。由于布网目的不同,影响网质量的因素也就不同,比如大气折光和系统误差对工程测量控制网的影响很大,而对变形网的影响不是最重要的。在变形观测中只要保证监测仪器和人员相对不变,计算过程中上述影响可以相互抵消,使变形不会受这些误差的影响;第二,首级网的精度相对较高,基准点一般应建立在变形体以外的稳定区域,特别是网址的起算点一点要建立在基岩基础上,以便于发现其他点位移,工作基点可以布设在变形区;第三,变形网的网址应在现有的人力、物力和财力的基础上尽可能的具有发现监测点位移的精度、灵敏度和可靠性,看其指标能否满足变形监测要求;第四,变形网的边长一般较短,但精度高,一般情况下需要强制归心;变形网要求通视条件好,而不过于要求网形的构成;对变形网来说,多余观测冗余多。 2变形监测系统的组成 2.1自动监测系统 通常情况下,为实现项目监测的自动化,工作基点站应设在隧道侧壁,同时设置四个校核点以校核工作基点。安装于基点站的TCA2003全站仪与监测系统机房建立通讯联系,由机房控制全站仪对校核点和变形点按一定的顺序进行逐点扫描、记录、计算及自校,并将测量结果发送至机房入库存储或并进行整编分析,实现了自动观测、记录、处理、储存、变形量报表编制和监测结果自动远程发送等功能。 2.2徕卡自动全站仪 徕卡TCA系列自动化全站仪,又称“测量机器人”,该仪器精度高,且性能稳定,其内置自动目标识别系统,可以自动搜索目标、精确照准目标、跟踪目标、自动测量、自动记录数据,在几秒内完成一目标点的观测,像机器人一样对多个目标作持续和重复观测,具有计算机远程控制等优异的性能。采用结构变形自动化监测系统进行变形监测,可以实现无人值守及自动进行监测预报,即实现变形监测全自动化,它不仅便捷准确,而且可以减少传统意义上形变观测中的人为观测误差及资料整编分析中可能造成的数据差错。 2.3工作基站及校核点设置 为使各点误差均匀,并使全站仪容易自动寻找目标,工作基站布设于监测点中部,校核点布设在远离变形区以外,最外观测断面以外40m左右的隧道中,先制作全站仪托架,托架安装在隧道侧壁,离道床距离1.2m左右,以便全站仪容易自动寻找目标,监测基准点使用位于东山口站台内的平面、高程控制点。 2.4隧道监测断面布置及监测断面内监测点布置 变形监测点按照设计要求的断面布设,上下行隧道各布置5个监测断面,每个断面在轨道附近的道床上布设两个沉降监测点,中腰位置两侧各布设两个水平位移监测点,即每个监测断面布设6个监测点。各观测点用连接件(人字形钢架)配小规格反射棱镜,用膨胀螺丝及云石胶锚固于监测位置的侧壁及道床的混凝土中,棱镜反射面指向工作基点。布设监测点应严格注意避免设备侵入限界,可以将监测点布设在图中位置。 3变形监测平面控制网的建立与精度分析 3.1监测网的建立 3.1.1平面控制网的建立 首先应根据设计单位和用户对实施监测物的精度要求,结合施工单位的仪器设备,制定平面测量的等级,然后充分考虑工程各部施工放样需要,点位不与工程建筑物发生冲突,使用方便,点位便于长期保存等方面情况下交替进行图上和实地选点,构造网形,确定点位测量的实方案。在点位确定后,可以根据点与点之间的通视情况构成网形,拟定图中的角度和边长观测量,可以用专有的软件进行精度的估算和观测量优化,通常是边角全测网开始优化计算,若计算结果的冗余过大,删掉一些通视条件不好的,边长过长,竖直角过大的边和相应的角度,再进行估算,直至点位精度满足要求,工作量又相对较小。 3.1.2高程控制网
隧道变形监测方案 1、目的 为明确隧道内变形观测的作业内容,规范技术细节及作业程序,总结隧道结构变形规律,为隧道结构维修养护提供依据,指导津滨轻轨隧道变形观测工作进行,从而保证行车安全,特制订本预案。 2、适用范围 2.1适用于津滨轻轨隧道变形观测的相关工作; 2.2线桥室从事变形观测的相关工作人员须依据本方案开展各项变形观测工作。 3、职责分工 隧道变形工作由线桥室主任及安技主管进行监督指导,桥梁维修主管负责变形观测工作的全面管理与协调,桥梁检测工程师协同隧道工程师、桥梁维修工程师负责隧道变形观测的相关技术工作,并由桥隧检测工区负责具体实施。 4、参考依据 《建筑变形测量规程》 《地下铁道、轨道交通工程测量规范》 《地下铁道工程施工及验收规范》 5、变形观测工作内容 5.1隧道沉降观测 监测隧道结构的沉降,主要是监测隧道结构的底板沉降,实质上是对道床的监测,主要包括区间隧道的沉降监测以及隧道与地下车站交接处的沉降差异监测。运营测量采用的坐标系统、高程系统、图式等与原施工测量相同。 5.1.1监测基准网 监测基准网是隧道沉降监测的参考系,由水准基点和工作基点构成,网形布设成附合水准路线或沿上、下行线隧道布设成结点水准路线形式,采用国家二等水准测量的观测标准进行。水准基点采用隧道线路两端远离测区的国家II等水准点,在沿线车站内和联络通道处布设工作基点,每个车站布设4个工作基点,联络通道处布设2个工作基点,水准基点与车站内、联络通道处工作基点共同构成监测基准网,如图1所示。基准网的高程值由国家水准点引入,每季度校核一
次,分析工作基点的稳定性;然后,再通过车站内两侧的工作基点,采用附合水准路线对每段隧道结构进行沉降观测。 图1 监测基准网示意图 5.1.2沉降监测点 津滨轻轨地下结构由明挖段和盾构组成,明挖段沉降监测点按施工浇筑段每段设4个点,分别布设在左右两侧墙上。具体布置见图2。 图2 明挖段沉降监测点布置示意图 为方便以后长期的位移监测工作,隧道内沉降监测点布设在隧道中线的道床上,隧道直线段每隔30m设一个测点,曲线处根据曲线半径大小设置测点间距,半径为400m曲线处每隔12m设一个测点,半径为800m曲线处每隔18m设一个测点,半径为2000m曲线处每隔30m设一个测点。具体布置见图3。
地铁隧道结构变形监测控制网及其数据处理 发表时间:2017-10-30T09:25:06.667Z 来源:《基层建设》2017年第20期作者:汪英宏王守横 [导读] 摘要:地铁隧道结构复杂,在长期使用过程中会受到各种因素的影响,因此,做好变形监测非常重要。 上海市机械施工集团有限公司大连地铁216标段项目经理部辽宁大连 116037 摘要:地铁隧道结构复杂,在长期使用过程中会受到各种因素的影响,因此,做好变形监测非常重要。本文将进行分析,以供参考。关键词:地铁隧道;变形监测;原因;措施 1.前言 对于地铁隧道结构变形的监测,不能采用传统的变形监测控制网布设方法,在施工过程中根据施工要求对工艺参数进行控制,为保证结果的准确度,必须进行基准点的稳定性检验。 2.地铁隧道变形原因 2.1轨道结构变形 地铁隧道变形包括轨道结构变形和隧道结构变形两种形式。其中轨道结构变形的主要原因是列车荷载长期对轨道产生反复作用,使轨道发生几何偏差进而影响轨道的平整性和顺畅性。除列车荷载作用外,隧道周边建设施工的卸载、负荷、加载也会引起道床的不均匀沉降。这种沉降同样会影响轨道的平整度及顺畅。对于铁路来说,地铁运行车辆重量较轻、速度低,轨道和车辆行走部分的变形一般不会引起地铁事故,但轨道变形造成的不平顺可能会导致列车发生不正常振动。这会降低列车运行的稳定性,减少用户的舒适度,更重要的是会加快轨道结构部件的损坏速度,从而间接影响列车的行车安全。 2.2隧道结构变形 地铁隧道结构变形发生在施工阶段和运营阶段,在施工阶段,地铁暗挖隧道工程是在岩土体内部进行的。在开挖过程中对地下岩土的扰动是不可避免的,这就破坏了地下岩土体原有的平衡条件。隧道开挖时地层初期受到的影响较小,发生的也是微型形变,随着开挖的不断深入,变形会极剧增大然后又趋于缓慢。因此,在隧道开挖过程中应对隧道的拱顶下沉量和地表的下沉量进行监测,以便于对隧道结构的稳定性和开挖工程的安全性提供分析依据。地铁隧道开挖引起的地层变形是一个漫长而缓慢的过程,无论是浅埋暗挖法还是盾构法在工程完工投入使用后都会不同程度的发生整体下沉的现象,尤其是工程处于软土层中时下沉现象更加明显。 3.地铁隧道变形监测技术 3.1传统监测技术 传统监测技术是利用水准测量仪的检测功能对隧道结构的变形情况进行监测,主要对隧道变形区域的断面进行监测。该法在实际使用过程中存在一系列不足: 首先,该法无法使用先进的远程测量技术。在监测过程中不得不打断监测区内的列车运行。 其次,地铁隧道内可视性差,空间受到限制,运行环境复杂,给监测的安全性和监测质量造成了不利影响。 最后,监测点数量受限,若设置监测点过多,不仅会增大工作量还会延长监测周期的长度,无法准确的反映出变形的真实情况;若设置监测点过少,无法根据有限的数据得到较为精准的变形趋势,这对后期的隧道结构的变形负荷分析是极为不利的。传统的监测技术已经无法适应现代社会的需求新型的监测技术急需被研发使用。 3.2高程监测控制网 在地铁进行跨河水准测量、测量机器人三角高程法测量、GPS 测高三种方法进行施测。 3.2.1跨河水准测量跨河水准观测采用威特 N3 及配套的铟瓦水准尺,施测前仪器 i 角检校为+1.2s。跨河水准测量严格按《国家一、二等水准测量规范》要求选定与布设场地,使仪器及标尺点构成平行四边形。作业方法、视线距水面的高度、时间段数、测回数、组数及仪器检查等按规范要求执行。按二等跨河水准观测精度施测 8个测回,高差中数中误差为±1.48mm。 3.2.2 测量机器人三角高程法测量采用徕卡 TCA2003 机器人完成,在 b1、b2 设置仪器,对向观测 12 个测回,测回间隔 5min。每测回量取 2 次仪高和棱镜高,量取至毫米。高差中数中误差为±1.00mm。 3.2.3 GPS 高程测量b1、b2大地四边形进行 GPS 联测,GPS 网解算的 b1、b2大地高的高差为-0.3403。 3.2.4 三种方法的成果比较高程监测控制网采用跨河水准测量、测量机器人三角高程法测量、GPS 测高三种方法进行施测结果进行对比。 4.基于组合后验方差检验法的灵敏度 4.1灵敏度的概念及其目的 通常情况下对基准点的稳定性进行判断是在测量结束后的内业处理过程中,删除一些不稳定的点带来人力物力和时间的浪费,在当今世界寻求的应是高效节能的方法,若是在观测现场测量人员或者测量机器人根据观测数据能感知到基准点的不稳定性,就可以给外业监测提供指导,提前对基准点进行筛选,甚至给基准网的布设提供意见,使得地铁隧道结构变形监测网和后期数据处理得到优化。 然而对同一个点的多次观测结果存在差异可能是误差影响也可能是基准点不稳定引起,要是知道到底出现多大的变动时可以认为是基准点发生了移动,那进行现场监测时就能对基准点的稳定性进行判断,不需要等到进行完内业处理才能得到答案。当观测值出现一定程度变化的时候,这种方法就能够有效的检测出结果。 4.2组合后验方差检验法灵敏度的探测 为模拟基准点的变动,对观测数据进行人为的改动。从众多基准点中任意选取3个,分别对方位角、天顶距和距离三个观测量进行测试,当角度偏差大于3秒小于6秒时对该点的稳定性应持怀疑态度,而大于6秒时该点稳定性就一定不可靠,当距离的测量偏差大于5mm时该点的稳定性同样不可靠。计算所得的组合后验方差检验法的灵敏度在实际工程实例中可以作为重要的比较参考值,通过比较监测数值间的差值,实现监测现场简单、快速判定基准点的稳定性。 5.隧道变形监控的系统建立 5.1系统数据库结构 变形监测数据库用于存储监测点属性、监测成果等数据信息,是数据管理系统的基础。因此,合理的数据库结构不仅是数据库设计的
一、观测方法与基本原理 ?? 结合现场实际情况,在首级控制网的基础上,布设了加密控制网。根据松花江大顶子山航电枢纽厂房、泄洪闸、船闸土建工程所处的施工部位,本着便于整体控制,易于保存的原则,以首级控制网为基础,在施工区周围布设了JK01、JK02、JK03、JK04四个加密点。这些加密点,分布均匀,通视条件好,地基稳定且不易被破坏,对整个施工区域可以进行全方位的观测。加密控制网布设原则以首级控制点为基础,并按二等的施测方安案做了一条闭合导线。 ?? 由于首级控制点江南SN01、SN02、SN03、02-1之间互不通视,江北SN04、SN05互不通视。受地形、通视条件的限制,采取边角后方交会的方法,加密了JK01点、JK02点,再由SN02-Jk01起算,复核JK02,在布网过程中,为了保证精度,在不同的测站使用不同仪器和由不同人员观测,采取了增加多余观测、增加测回数、强制归心等措施,后视SN01 、SN02、02-1,使用徕卡TCR1800全站仪,观测9个测回,经过计算JK01点的误差为2.3mm,达到二等的精度要求。JK01与JK02、JK03 、JK04、SN02构成一条闭合导线。 ?? 精度指标严格执法《水利水电工程施工测量规范》(DL/T5173-2003)中二等控制网的技术要求。Mb<1.0”、Mp<(5~7)mm(注:Mb:测量角中误差;Mp:平面控制网点的点位中误差)。
?? 使用仪器及观测方法。使用仪器为瑞士徕佧TCR1800系列全站仪,新建控制点采用具有强制归心装置的混凝土观测墩,水平角观测采用测回法,施测9个测回,同测回盘左、盘右所得角值较差小于4”,半测回归零差小于6”,同方向各测回互差小6”;2C值互差小于9”,距离观测采用电磁波测距(往返测),并进行了温度和气压修正。二、精度计算与分析 1、平面部分精度计算,边角后方交会法测量测站点的精度估算公式为: ?? {[1+(sin2β)/(K2-sin2β)]m2s+[1+(cos2β)/(K2-sin2β)] 2(s2m2β/ρ2)} ?? =±2.3mm<±(5~7)mm ?? 其中:Mp JK01为测站点JK01的点位中误差,单位为mm ?? β=27”06”11.4722” ?? K=363.9389273/363.9341726=1.000013065
地铁运营自动化监测技术国内外研究现状调研报告 上海地矿工程勘察有限公司 二O一O年十一月
目录 第一章前言 (1) 第二章国内外监测技术研究现状 (1) 2.1 全站仪自动量测系统 (2) 2.1.1 系统的构成 (2) 2.1.2 TCA自动化全站仪 (2) 2.1.3 Leica标准精密测距棱镜 (3) 2.1.4 计算机 (4) 2.1.5 其他设备 (4) 2.1.6 实时监控软件 (4) 2.1.7 后方处理软件 (4) 2.1.8 观测方法 (5) 2.1.9误差来源 (5) 2.1.10误差来源 (5) 2.2 静力水准仪系统 (6) 2.2.1 系统组成 (6) 2.2.2 静力水准仪的结构 (6) 2.2.3 静力水准仪的测量原理 (7) 2.2.2 RJ型电容式静力水准仪主要技术指标 (8) 2.2.3 静力水准仪的安装及调试 (9) 2.2.4 静力水准仪的观测和运行维护 (10) 2.2.5静力水准仪漏液及蒸发后所得数据的处理 (10) 第三章自动化监测项目的必要性与可行性分析 (11) 3.1 项目必要性分析 (11) 3.1 重大工程运营安全已成为社会稳定的重要因素之一 (11) 3.2 随着轨道交通不断建设和投入使用,地质环境变化及自身结构变形对其安全运营影响日益显现 (11) 3.2 重大工程安全运营对环境要求不断提高,需及时地掌握影响其安全运营的变形情况 (13) 3.2 目前国内监测市场的方法体系相对落后、不够系统,有待提高 (14) 3.2 项目可行性分析 (14) 3.2.1政府和社会的高度重视 (14) 3.2.2国内外相关技术的飞速发展提供了技术可行性 (14) 第四章结束语 (15)
我国大坝自动化安全监测现状 200930201489周杰华 我国大坝自动化安全监测的研究始于70年代末,80年代有了长足的进步,进入90年代中期以后,随着现代科学技术的迅猛发展,特别是传感技术、计算机和微电子技术、通信技术的巨大发展,我国大坝自动化安全监测技术的总体水平有了一个质的飞跃,监测自动化技术已渐趋成熟,大坝安全监测的实时性、稳定性、可靠性和实用性有了显著的提高。可以说21世纪大坝自动化安全监测已进入了推广应用的新时代。 一、概述 从1992年对83座水电站大坝开展了首轮水电站大坝安全监测设施更新改造工作开始,通过八年多的努力,绝大部分水电站大坝已完成以“完善化为主,着重配齐必要的监测项目,提高监测精度、稳定性和可靠性”为目标的更新改造工作,设置了必要的变形、渗流等监测项目,大坝安全监测设施的现状有了较大的改善,使这些大坝健全了监视其安全的耳目。但是,通过调查发现:由于客观因素的限制和变化以及人们认识水平的不断提高,部分大坝的监测设施还存在一些问题。如:有的大坝变形监测未设校核基点,或测点布置和结构不合理,或监测精度不能满足规范要求,或设备老化、受损,或自动化程度不高等。 在大坝自动化安全监测方面,根据对电力系统136座水电站大坝自动化安全监测调查情况看,有60座水电站大坝单个或多个监测项目采用了监测自动化技术,实现了数据的自动采集。其中,有33座大坝的变形、渗流等主要监测项目实现了监测自动化,有18座大坝的变形监测实现了自动化,有6座大坝的渗流监测实现了自动化。系统都有在线监测的功能(如数据的自动采集、传输、储存和处理),大多数系统还有离线分析、建立数学模型、报表制作、图形制作等功能。 大坝自动化安全监测的实现,提高了监测精度,改善了监测条件,减轻了劳动强度,增强了对大坝的在线监测能力,为今后实现在线监控和在线管理打下了良好的基础。同时对及时掌握大坝运行状态发挥了重要作用,也为大坝安全评价提供了科学依据。 从调查的资料中也可以看出,各大坝的监测自动化系统的规模、功能、稳定性、可靠性参差不齐,绝大多数基本能满足监测要求。但也有一些系统,特别是1995年以前建成的系统问题较多,有的已处于瘫痪状态(如盐锅峡),有的监测数据系列较差、精度低不能满足资料分析要求(如桓仁、回龙山的垂线,梅山的垂线,柘溪的垂线和量水堰、富春江的引张线,长潭的激光准直,枫树坝的采集单元等),急需进行改造完善。系统发生故障的原因主要有:传感器、设备元器件质量差,还有雷击、潮湿、鼠咬、浸水等外界因素。 二、下面分监测方法、监测仪器(传感器)、数据采集系统、监控管理系统四大部分对目前的监测自动化有关现状加以叙述。 1 监测方法 选择有效的监测方法是取得良好监测效果的保证。表1汇总了大坝自动化安全监测常用
所谓变形监测,就是利用测量与专用仪器和方法对变形体的变形现象进行监视观测的工作。其任务是确定在各种载荷和外力作用下,变形体的形状、大小及位置变化的空间状态和时间特征。 变形观测:对变形体在运动中的空间和时间域内进行周期性的重复观测,就称为变形观测。根据变形体的研究范围,可将变形监测研究对象划分为这样三类: 1全球性变形研究如监测全球板块运动、地极移动、地球自转速率变化、地潮等; 2区域性变形研究如地壳形变监测、城市地面沉降等; 3工程和局部性变形研究如监测工程建筑物的三维变形、滑坡体的滑动、地下开采使引起的地表移动和下沉等。 变形监测的内容 1)工业与民用建筑物:主要包括基础的沉陷观测与建筑物本身的变形观测 2)水工建筑物:对于土坝,其观测项目主要为水平位移、垂直位移、渗透以及裂缝观测。3)地面沉降:对于建立在江河下游冲积层上的城市,由于工业用水需要大量地吸取地下水,而影响地下土层的结构,将使地面发生沉降现象。对于地下采矿地区,由于在地下大量的采掘,也会使地表发生沉降现象 变形监测的目的和意义:具有实用上的意义,主要是掌握各种建筑物和地质构造的稳定性,为安全性诊断提供必要信息,及时发现问题,以便采取措施;具有科学上的意义,包括更好地理解变形的机理,验证有关工程设计的理论和地壳运动的假说,进行反馈设计,以及建立有效的变形预报模型。 变形监测技术的未来发展趋势: 1)多种传感器、数字近景摄影、全自动跟踪全站仪和GPS的应用,将向实时、连续、高效率、自动化、动态监测系统的方向发展; 2)变形监测的时空采样率会得到大大提高,变形监测自动化可为变形分析提供极为丰富的数据信息; 3)高度可靠、实用、先进的监测仪器和自动化系统,要求在恶劣环境下长期稳定可靠地运行; 4)实现远程在线实时监控,在大坝、桥梁、边坡体等工程中将发挥巨大作用,网络监控是推进重大工程安全监控管理的必由之路。 1.什么是监测网平差的基准,平差基准有哪三种类型? 固定基准位于变形体之外,在各观测周期中认为是不变的,以作为测定变形点绝 对位移的参考点。在监测网平差中,我们通常将变形参考系称为基准,监测网平 差时必须考虑网点位置及其位移的参考基准。如果基准不统一,形变量中就会混 入基准误差;如果基准定义不当,也会给形变分析带来困难。 监测网平差的基准固定基准—经典平差,重心基准—自由网平差,局部重心基准—拟稳平差监测点位布置:必须安全、可靠,布局合理,突出重点,并能满足监测设计及精度要求,便于长期监测。 沉降观测工作点的布设:1)沉降监测工作点应布设在最有代表性的部位,还要考虑到建筑物基础的地质条件,建筑物特征,建筑物内部应力分布状况等。2)工作点应与建筑物连接牢固,使工作点的高程变化能真正反映建筑物的沉降变化情况。3)工作点的点位应便于观