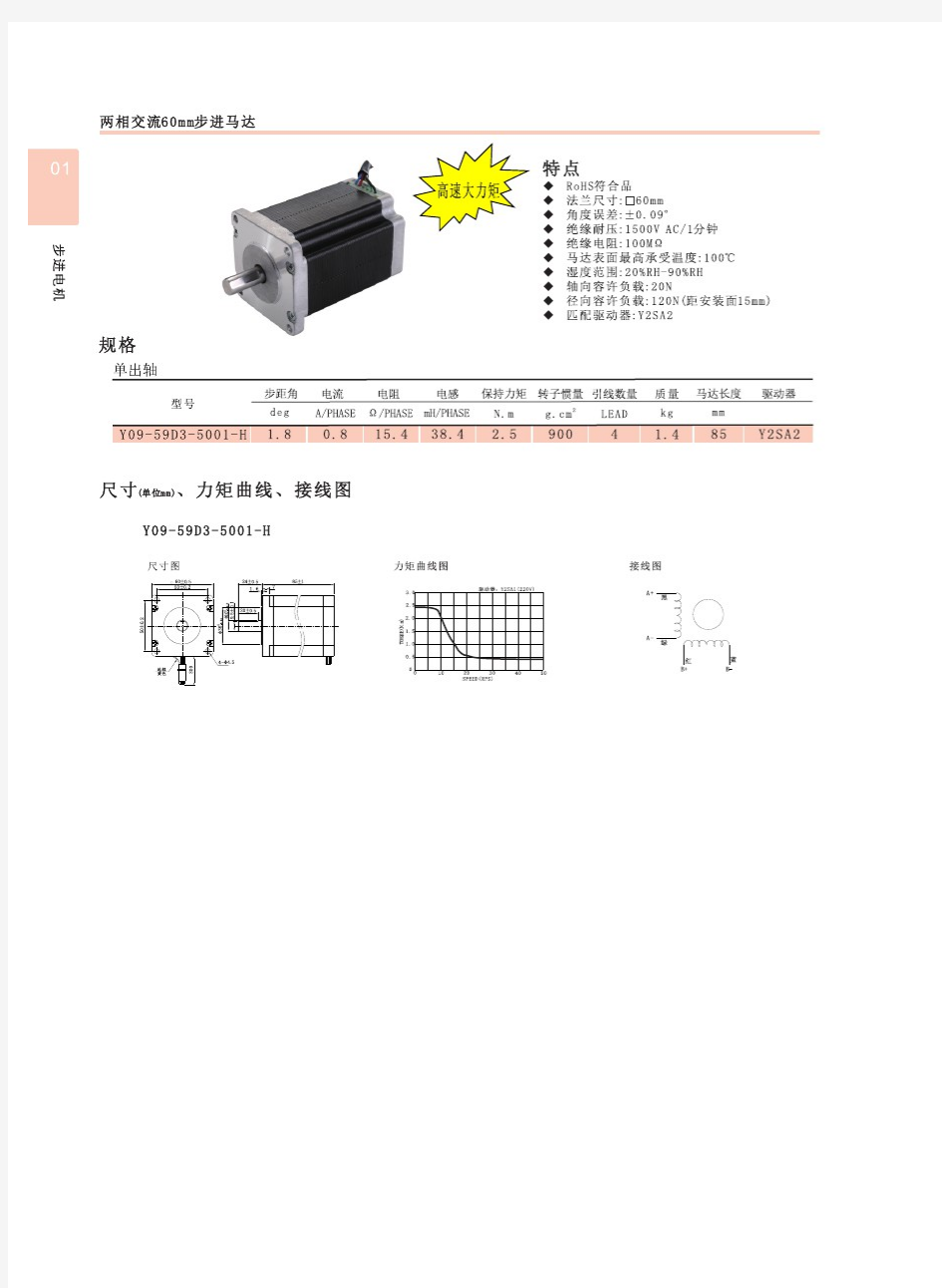
特点
◆ 径向容许负载:90N(距安装面15mm)
◆ RoHS 符合品
◆ 安装孔距:47.14mm
◆ 绝缘电阻:100MΩ
◆ 匹配驱动器:Y2SD2
◆ 马达表面最高承受温度:100℃
◆ 湿度范围:20%RH-90%RH
◆ 绝缘耐压:500V AC /1分钟
◆ 角度误差:±0.09°
◆ 轴向容许负载:20N
◆ 法兰尺寸:□60mm
规格
型号步距角
电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm
机械尺寸(单位mm )
2g.cm 驱动器A+A-B+B-棕
橙
红
黄
0102030
4000.2
0.4
0.60.8
1.0
1.2
SPEED(RPS)T O R Q U E (N .m )
5024V 36V 48V 驱动器:Y2SD2标配连接线:长度300min
力矩曲线
0510152000.51.01.52.02.53.0SPEED(RPS)T O R Q U E (N .m )2524V 36V 48V 驱动器:Y2SD2接线图
010********.30.60.91.21.51.8SPEED(RPS)T O R Q U E (N .m )5024V 36V 48V 驱动器:Y2SD2Y09-59D3-1305-P
Y09-59D3-3305-P Y09-59D3-5001-P
0.6
1.2 1.81.2
2.4
3.61.8
3.6 5.42.4
4.87.23.0
6.09.03.6
7.210.8SPEED(RPS)SPEED(RPS)SPEED(RPS)
24V 24V 24V 48V 48V 48V 60V 60V 60V 驱动器:Y2SD3(并联6A)驱动器:Y2SD3(并联6A)驱动器:Y2SD3(并联6A)◆ 绝缘耐压:1500V AC /1分钟
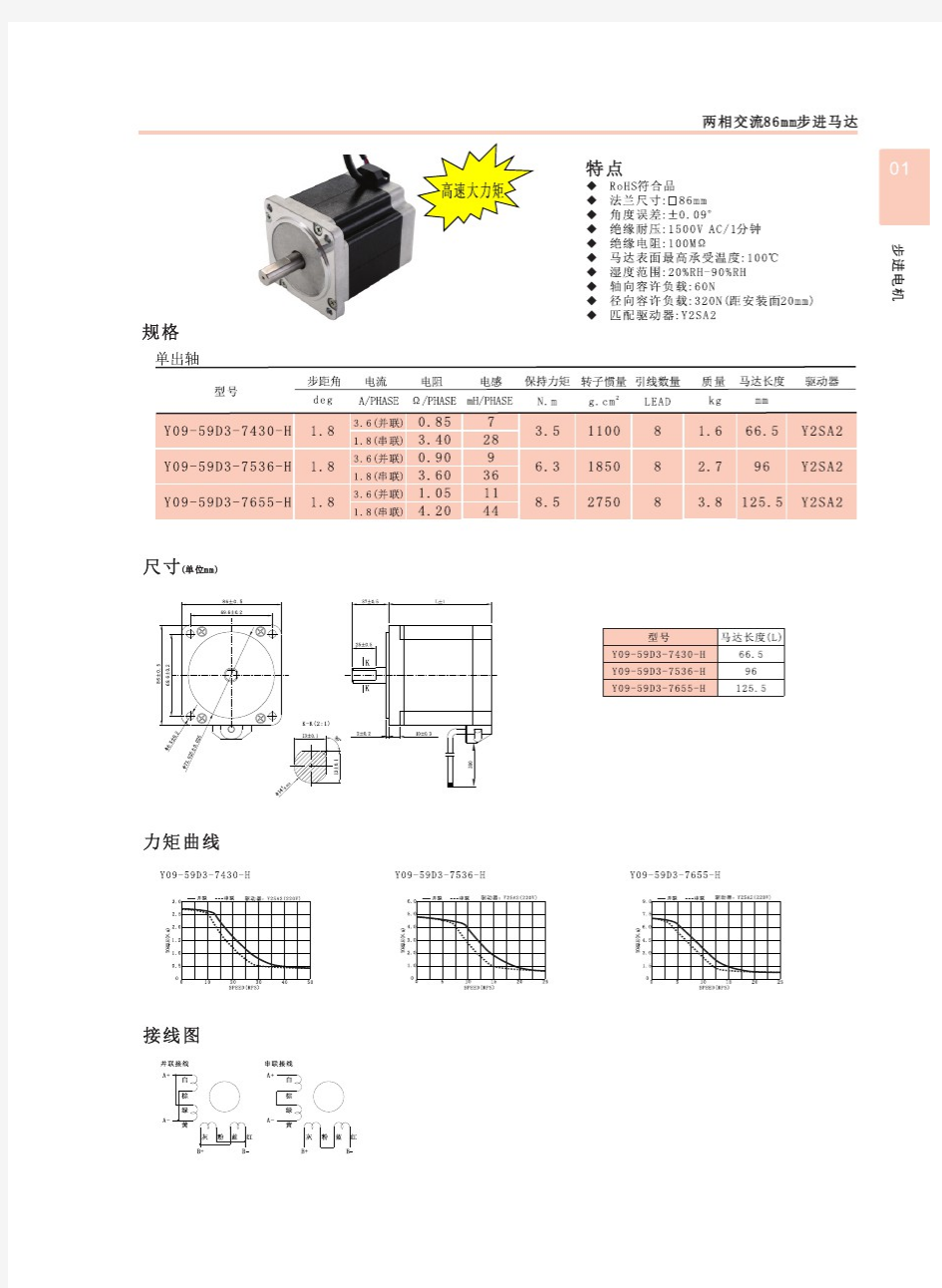
特点
◆ 绝缘电阻:100MΩ
◆ 马达表面最高承受温度:100℃
◆ 轴向容许负载:60N
◆ 径向容许负载:320N(距安装面20mm)
◆ 湿度范围:20%RH-90%RH
◆ RoHS 符合品
◆ 匹配驱动器:Y2SD3 or Y2SA2
◆ 法兰尺寸:□86mm
◆ 角度误差:±0.09°
规格
型号步距角
电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm
机械尺寸(单位mm )
2g.cm 驱动器力矩曲线
00055510101015
1515202020000T T T O O O R R R Q Q Q U U U E E E (((N N N ...m m m )))252525并联直流驱动
型号步距角
电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm
2g.cm 驱动器串联交流驱动
Y09-59D3-7430-P
Y09-59D3-7536-P Y09-59D3-7655-P
10203040
0.6
1.2 1.81.2
2.4
3.61.8
3.6 5.42.4
4.87.23.0
6.09.03.6
7.210.8SPEED(RPS)
SPEED(RPS)SPEED(RPS)50驱动器:Y2SA2(220VAC
,串联3A)驱动器:Y2SA2(220VAC ,串联3A)驱动器:
Y2SA2(220VAC ,串联3A)00055101015152020000T T T O
O O R
R R Q
Q Q U U U E
E E (
((N
N N .
..m
m m )))2525接线图
A+A-A+A-B+B-黑绿红蓝黄橙白棕并联接线
串联接线Y09-59D3-7430-P Y09-59D3-7536-P Y09-59D3-7655-P
电机控制线路图大全 Y-△(星三角)降压启动控制线路-接触器应用接线图 Y-△降压启动适用于正常工作时定子绕组作三角形连接的电动机。由于方法简便且经济,所以使用较普遍,但启动转矩只有全压启动的三分之…,故只适用于空载或轻载启动。 Y-△启动器有OX3-13、Qx3—30、、Qx3—55、QX3—125型等。OX3后丽的数字系指额定电压为380V时,启动器可控制电动机的最大功率值(以kW计)。 OX3—13型Y-△自动启动器的控制线路如图11—11所示。(https://www.doczj.com/doc/8518805932.html,) 合上电源开关Qs后,按下启动按钮SB2,接触器KM和KMl线圈同时获电吸合,KM和KMl 主触头闭合,电动机接成Y降压启动,与此同时,时间继电器KT的线圈同时获电,I 星形—三角形降压起动控制线路
星形——三角形降压起动控制线路 星形——三角形( Y —△)降压起动是指电动机起动时,把定子绕组接成星形,以降低起动电压,减小起动电流;待电动机起动后,再把定子绕组改接成三角形,使电动机全压运行。 Y —△起动只能用于正常运行时为△形接法的电动机。 1.按钮、接触器控制 Y —△降压起动控制线路 图 2.19 ( a )为按钮、接触器控制 Y —△降压起动控制线路。线路的工作原理为:按下起动按钮 SB1 , KM1 、 KM2 得电吸合, KM1 自锁,电动机星形起动,待电动机转速接近额定转速时,按下 SB2 , KM2 断电、 KM3 得电并自锁,电动机转换成三角形全压运行。 2.时间继电器控制 Y —△降压起动控制线路 图 2.19 ( b )为时间继电器自动控制 Y —△降压起动控制线路,电路的工作原理为:按下起动按钮 SB1 , KM1 、 KM2 得电吸合,电动机星形起动,同时 KT 也得电,经延时后时间继电器 KT 常闭触头打开,使得 KM2 断电,常开触头闭合,使得 KM3 得电闭合并自锁,电动机由星形切换成三角形正常运行。 图2定子串电阻降压起动控制线路
采用单相电源供电的三相异步电动机接线方法 三相异步电动机由于构造简单、成本低、维修使用方便、运行可靠等优点,被广泛应用于工农业生产。三相电动机的电源应是三相电源,但实际上常会遇到只有单相电源的问题,特别是在家用电器上用的都是单相电动机,坏了以后想用三相电动机代替,就必须做适当的改接,以使三相电动机适应于单相电源而正常工作,下面具体谈其接线方法。 改接原理 三相异步电机是利用三相互隔120°角度的平衡电流,通过定子绕组时产生一个随时间变化的旋转磁场,以驱使电动机运转工作的。在谈到三相异步电机改单相使用之前,先要说明单相异步电动机旋转磁场建立问题,单相电动机只有在建立旋转磁场后才能够起动。它之所以没有初始起动转距,是因为在单相绕组中建立起的磁场不是旋转的,而是脉动的,换句话说,它对定子来讲是不动的。在这种情况下,定子的脉动磁场与转子导体内的电流相互作用是不能产生转矩的,因为没有旋转磁场,所以就不能使电机起动运转。但是电动机内部两个绕组的位置有空间角度差,若设法再产生一不同相的电流,使两相电流在时间上有一定的相位差,才能产生旋转磁场,使电机起动。因此单相电动机的定子除了有工作绕组外,还必须有起动绕组。根据此原理,可利用三相异步电机定子的三相绕组,将其中一相绕组线圈采用电容或电感移相的方法,使两相通过不同的电流,这样就能建立旋转磁场,使电动机起动运转。当三相异步电机改为单相电源使用时,其功率仅是原来的2/3。 改接方法 要把三相电机使用在单相电源上,可将三相异步电动机定子绕组中的任意二相绕组线圈首先串联,再与另一相绕组并联接入电源。这时,两个绕组里的磁通量在空间上虽然有相位差,但因工作绕组和起动绕组都是接在同一电源上,如按时间来讲,电流是相同的。因此,只有在起动绕组上串联一只电容器、电感线圈或电阻,才能使电流有相位差。在接法上为了增大起动转矩,可用一台自耦变压器将单相电源的电压由220v升到380V,示意图如图1所示。一般小型电动机均为Y接,对Y接的三相异步电动机用此种方法接线,应将串入电容c的绕组接线端子接在自耦变压器起头端子上,如需改变转轴转动方向,可按图2接线。 如果不升高电压,接在220V的电源也可用此图示。因为原来接三相380V电源电压的绕组,现在用于220V电源,电压太低了,所以转矩太低。 图3接线转矩太低,若增大力矩可将移相电容串入二相绕组连在一起的线圈中,用此绕组为起动绕组,单只线圈直接接在220V电源上,见图4。 图3、图4如果需要改变转轴转动方向,可将起动绕组或运转绕组的头尾换一下就可。 两个绕组串联后的磁矩(其中一相反串)是由两个夹角互为60°磁矩合成的(如图5),其磁矩远远大于由两个夹角互为120°合成的磁矩(如图6两绕组顺串),所以图5接线的起动转矩
接线图 适配驱动器 电机型号 适配驱动器 57HS04 DM422C/DM432C/DM556/DM856/M752/M542/M860/M880A/ MA550/MA860/H 850/ND556/ND882/M415B/M325 57HS06 57HS09 57HSM09 57HS13 DM556/DM856/M752/M542/M860/M880A/MA550/MA860/H850/ND556/ND88 2 57HS22 步进电机是一种专门用于位置和速度精确控制的特种电机。步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。如接收到一串脉冲步进电机将连续运转一段相应距离。同时可通过控制脉冲频率,直接对电机转速进行控制。由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近 年来在各行各业的控制设备中获得了越来越广泛的应用。 步进电机的种类和特点 步进电机在构造上有三种主要类型:反应式(Variable Reluctance ,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
* 反应式 定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达°、但动 态性能差、效率低、发热大,可靠性难保证。 * 永磁式 永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动 态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为°或15°)。 * 混合式 混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。其特点是输出力矩大、动态性能好, 步距角小,但结构复杂、成本相对较高。 按定子上绕组来分,共有二相、三相和五相等系列。最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为°/步,配上半步驱动器后,步距角减少为°,配上细分驱动器后其步距角可细分达256倍°/微步)。由于摩擦力和制造精度等原因,实际控制精度略低。同一步进电机可配 不同细分的驱动器以改变精度和效果。 雷赛步进电机系列 雷赛两相、三相混合式步进电机,采用优质冷轧钢片和耐高温永磁体制造,产品规格涵盖35-130范围。具有温升低、可靠性高的特点,由于其具有良好的内部阻尼特性,因而运行平稳,无明显震荡区。可满足不同行业、不同环境下的使用需求。 雷赛采用专利技术研发的三相步进电机驱动系统,更好地解决了传统步进电机低速爬行、有共振区、噪音大、高速扭矩小、起动频率低和驱动器可靠性差等缺点,具有交流伺服电机的某些运行特性,其运行效果可与进口产品相媲美。
1、定时自动循环控制电路 说明: 1、题图中的三相异步电动机容量为1.5KW,要求电路能定时自动循环正反转控制;正转维持时间为20秒钟,反转维持时间为40秒钟。 2、按原理图在配电板上配线,要求线路明快、工艺合理、接点牢靠。 3、简述电路工作原理。 注:时间继电器的延时时间不得小于15秒,时间调整应从长向短调。 定时自动循环控制电路电路工作原理:合上电源开关QF,按保持按钮SB2,中间继电器K A吸合,KA的自保触点与按钮SB2、KT1、KT2断电延时闭合的动断触点组成的串联电路并 联,接通了起动控制电路。按起动按钮SB3,时间继电器KT1得电,其断电延时断开的动合 触点KT1闭合,接触器KM1线圈得电,主触点闭合,电动机正转(正转维持时间为20秒计时 开始)。同时KM1动合触点接通了时间继电器KT2,其串联在接触器KM2线圈回路中的断电 延时断开的动合触点KT2闭合,由于KM1的互锁触点此时已断开,接触器KM2线圈不能通电 。当正转维持时间结束后,断电延时断开的动合触点KT1断开,KM1释放,电动机正转停止 。KM1的动断触点闭合,接触器KM2线圈得电,主触点闭合,电动机开始反转.同时KM1动 合触点断开了时间继电器KT2线圈回路(反转维持时间为40秒计时开始)。这时KM2动合触 点又接通了KT1线圈,断电延时断开的动合触点KT1闭合,为下次电动机正转作准备。因此
时串联在接触器KM1线圈回路中的KM2互锁触点断开,接触器KM1线圈暂时不得电。与按钮 SB2串联的KT1、KT2断电延时闭合的动断触点是保证在电动机自动循环结束后,才能再次 起动控制电路。热继电器FR常闭触点,是在电动机过负载或缺相过热时将控制电路自动断 开,保护了电动机。 2、顺序控制电路(范例) 顺序控制电路(范例)工作原理: 图A:KM2线圈电路由KM1线圈电路起动、停止控制环节之后接出。按下起动按钮SB2, KM1线圈得电吸合并自锁,此时才能控制KM2线圈电路。停止按钮SB3只能控制M2电动机 的停转,停止按钮SB1为全停按钮。本电路只有满足M1电动机先起动的条件,才能起动M2 电动机。 图B:控制电路由KM1线圈电路和KM2线圈电路单独构成。KM1的动合触点作为一控制条件 ,串接在KM2线圈电路中,只有KM1线圈得电吸合,其辅组助动合触点闭合,此时才能控制 KM2线圈电路。停止按钮SB3只能控制M2电动机的停转,停止按钮SB1为全停按钮。本电路 只有满足M1电动机先起动的条件,才能起动M2电动机。 3、电动机顺序控制电路
电动机实物接线图
电动机可逆带限位控制电路实物接线图
三相异步电动机正反转电气控制线路 在图3.5中,(a)图为主电路,通过当接触器KM1三对主触点把三相电源和电动机的定子绕组按顺相序L1、L2、L3连接,,而KM2的三对主触点把三相电源和电动机的定子绕组按反相序L3、L2、L1连 接,使电动机可以实现正反两个方向上的运行。 而图3.5(b)中,按下正转起动按钮SB2,接触器KM1线圈通电且自锁,主触点闭合使电动机正转,按下停止按钮SB1,接触器KM1线圈断电,主触点断开,电动机断电停转。再按下反转起动按钮SB 3,接触器KM2线圈通电且自锁,主触点闭合使电动机反转。但是在(b)图中,若按下正转起动按钮S B2再按下反转起动按钮SB3,或者同时按下SB2和SB3,接触器KM1和KM2线圈都能通电,两个接触器的主触点都会闭合,造成主电路中两相电源短路,因此,对正反转控制线路最基本的要求是:必须保证两个接触器不能同时工作,以防止电源短路,即进行互锁,使同一时间里只允许两个接触器中一个接触 器工作。 所以在图3.5(c)中,接触器KM1 、KM2线圈的支路中分别串接了对方的一个常闭辅助触点。工作时,按下正转起动按钮SB2,接触器KM1线圈通电,电动机正转,此时串接在KM2线圈支路中的KM1常闭触点断开,切断了反转接触器KM2线圈的通路,此时按下反转起动按钮SB3将无效。除非按下停 止按钮SB1,接触器KM1线圈断电,KM1常闭触点 复位闭合,再按下反转起动按钮SB3实现电动机的反转,同时,串接在KM1线圈支路中的KM2常闭触 点断开,封锁了接触器KM1使它无法通电。 这样的控制线路可以保证接触器KM1 、KM2不会同时通电,这种作用称为互锁,这两个接触器的常闭触点称为互锁触点,这种通过接触器常闭触点实现互锁的控制方式称为接触器互锁,又称为电气互锁。 判断一台电动机的好坏,一般16KW以下使用万用表就可以,30KW以下可用电桥。是可以用的。50KW以上使用就很不准了,最好的方法是低电压接入测电流,有大功率2KVA以上三相变压器,380V/36V或更低电压变压器接入电机直接用钳形表测电
两相步进电机接线方法和的电流设定问题 在使用两相步进电机时发现步进电机的转矩小,或达不到额定标称的转矩值,只好加大步进电机的尺寸和标称电流,以满足动力要求。其实有的时候并不是电机的问题,而是在步进电机选择或驱动器工作电流的设定上有不妥之处,没有发挥出步进电机的最大效率。 首先,从驱动器方面考虑,目前大多数两相步进电机的驱动器是采用全桥输出的四线接法,如果两相步进电机也是四线的,驱动器按照电机的标称电流设定,应该说是正确的,而且效率最高,输出转矩能够达到最大值。目前,新生产的步进电机大多是这种形式的。而目前网友大多是买的二手早期生产的步进电机,多是两相六线制的(四组两对串联线圈,每对有中心抽头),还有少量八线制的(四组两对独立线圈)。 是两相六线制步进电机有两种接法,第一种是舍弃中心抽头接两端,实际就是将每组的两个相线圈串联起来使用,电机堵转矩大和效率高些,但是高速性能差。第二种是接中心抽头和一端,这种接法电机高速性能好些,但是每相有一组线圈空闲,堵转矩小和效率低些。目前网友大多是采用第一种接线方法。这就出现一个问题,两相驱动器的电流到底应该设置多大正确,一般还都是按电机标称电流值来设定,这就出现了前面提到的电机效率问题。 一般步进电机标注的电流是相电流(或电阻),就是每组线圈的电流值(或电阻),如果两相六线制步进电机采用第一种接法,相当于将两组线圈串联起来,那么其每相电阻加大,额定工作电流减小,即使驱动器设置成标称电流也达不到各相的额定输出值。所以在选用驱动器和步进电机时出现电流匹配问题。正确的方法是应将驱动器的输出电流设定为步进电机额定相电流的0.7倍(也不是通常认为串联起来的电流减半)。举例,比如一个带中心抽头的两相步进电机,标称电流是3A,驱动器电流应该设定为3*0.7=2.1A。所以就出现你尽管选了3A的步进电机,实际上它的功率相当于两相四线制的2.1A步进电机。 再谈谈八线制的步进电机接法,也有两种,第一种是将每两组线圈串联使用,这样驱动器的电流也是设定为电机相电流的0.7倍,这种接法电机发热量小,但是高转速性能差些。第二种接法是将每两组线圈并联使用,驱动器的电流设定为电机相电流的1.4倍,其优点是高转速性能好些,但是电机发热量大,但是步进电机有点温度是正常的,只要低于电机的消磁温度就行,一般步进电机的消磁温度在105度左右。 所以在你有了输出电流不可调的步进电机驱动器(指两相全桥输出驱动器,如网友常用的TA8435,TB6560、A3977等驱动芯片)后,如何选用步进电机很重要,如果你的驱动器是2A的,尽量选用两相四线制2A的电机(如二手的日本东方电机大多是这种)如果你选用两相六线制电机,就要选标称相电流为2 / 0.7=2.9A(大约)的电机。这样才能更好地发挥驱动器的作用。 不过你要是选用的驱动器是半桥输出(如SLA7062M、SLA7026等驱动芯片),那只能接两相六线制电机,驱动器的电流和电机标称电流是一致的。不过这种驱动
三相异步电动机结构图解 图1封闭式三相异步电动机的结构 1—端盖2—轴承3—机座4—定子绕组5—转子 6—轴承7—端盖8—风扇9—风罩10—接线盒 异步电动机的结构也可分为定子.转子两大部分。定子就是电机中固定不动的部分,转子是电机的旋转部分。由于异步电动机的定子产生励磁旋转磁场,同时从电源吸收电能,并产生且通过旋转磁场把电能转换成转子上的机械能,所以与直流电机不同,交流电机定子是电枢。另外,定.转子之间还必须有一定间隙(称为空气隙),以保证转子的自由转动。异步电动机的空气隙较其他类型的电动机气隙要小,一般为
0.2mm~2mm。 三相异步电动机外形有开启式.防护式.封闭式等多种形式,以适应不同的工作需要。在某些特殊场合,还有特殊的外形防护型式,如防爆式.潜水泵式等。不管外形如何电动机结构 基本上是相同的。现以封闭式电动机为例介绍三相异步电动机的结构。如图1所示是一台封闭式三相异步电动机解体后的零部件图。 1.定子部分 定子部分由机座.定子铁心.定子绕组及端盖.轴承等部件组成。 (1)机座。机座用来支承定子铁心和固定端盖。中.小型电动机机座一般用铸铁浇成,大型电动机多采用钢板焊接而成。 (2)定子铁心。定子铁心是电动机磁路的一部分。为了减小涡流和磁滞损耗,通常用0.5mm厚的硅钢片叠压成圆筒,硅钢片表面的氧化层(大型电动机要求涂绝缘漆)作为片间绝缘,在铁心的内圆上均匀分布有与轴平行的槽,用以嵌放定子绕组。
(a)直条形式(b)斜条形式 图2 笼型异步电动机的转子绕组形式 (3)定子绕组。定子绕组是电动机的电路部分,也是最重要的部分,一般是由绝缘铜(或铝)导线绕制的绕组联接而成。它的作用就是利用通入的三相交流电产生旋转磁场。通常,绕组是用高强度绝缘漆包线绕制成各种型式的绕组,按一定的排列方式嵌入定子槽内。槽口用槽楔(一般为竹制)塞紧。槽内绕组匝间.绕组与铁心之间都要有良好的绝缘。如果是双层绕组(就是一个槽内分上下两层嵌放两条绕组边),还要加放层间绝缘。 (4)轴承。轴承是电动机定.转子衔接的部位,轴承有滚动轴承和滑动轴承两类,滚动轴承又有滚珠轴承(也称为球轴承),目前多数电动机都采用滚动轴承。这种轴承的外部有贮存润滑油的油箱,轴承上还装有油环,轴转动时带动油环转动,把油箱中的润滑油带到轴与轴承的接触面上。为使润滑油能分布在整个接触面上,轴承上紧贴轴的一面一般开有油槽。
三相异步电动机启动控制原理图 1、三相异步电动机的点动控制 点动正转控制线路是用按钮、接触器来控制电动机运转的最简单的正转控制线路。所谓点动控制是指:按下按钮,电动机就得电运转;松开按钮,电动机就失电停转。 典型的三相异步电动机的点动控制电气原理图如图3-1(a)所示。点动正转控制线路是由转换开关QS、熔断器FU、启动按钮SB、接触器KM及电动机M组成。其中以转换开关QS作电源隔离开关,熔断器FU作短路保护,按钮SB控制接触器KM的线圈得电、失电,接触器KM的主触头控制电动机M的启动与停止。 点动控制原理:当电动机需要点动时,先合上转换开关QS,此时电动机M尚未接通电源。按下启动按钮SB,接触器KM的线圈得电,带动接触器KM的三对主触头闭合,电动机M便接通电源启动运转。当电动机需要停转时,只要松开启动按钮SB,使接触器KM的线圈失电,带动接触器KM的三对主触头恢复断开,电动机M失电停转。在生产实际应用
中,电动机的点动控制电路使用非常广泛,把启动按钮SB换成压力接点、限位节点、水位接点等,就可以实现各种各样的自动控制电路,控制小型电动机的自动运行。 2.三相异步电动机的自锁控制 三相异步电动机的自锁控制线路如图3-2所示,和点动控制的主电路大致相同,但在控制电路中又串接了一个停止按钮SB1,在启动按钮SB2的两端并接了接触器KM的一对常开辅助触头。接触器自锁正转控制线路不但能使电动机连续运转,而且还有一个重要的特点,就是具有欠压和失压保护作用。它主要由按钮开关SB(起停电动机使用)、交流接触器KM (用做接通和切断电动机的电源以及失压和欠压保护等)、热继电器(用做电动机的过载保护)等组成。 欠压保护:“欠压”是指线路电压低于电动机应加的额定电压。“欠压保护”是指当线路电压下降到某一数值时,电动机能自动脱离电源电压停转,避免电动机在欠压下运行的一种保护。因为当线路电压下降时,电动机的转矩随之减小,电动机的转速也随之降低,从而使电动机的工作电流增大,影响电动机的正常运行,电压下降严重时还会引起“堵转”(即 电动机接通电源但不转动)的现象,以致损坏电动机。采用接触器自锁正转控制线路就可避免电动机欠压运行,这是因为当线路电压下降到一定值(一般指低于额定电压85%以下)时, 接触器线圈两端的电压也同样下降到一定值,从而使接触器线圈磁通减弱,产生的电磁吸力减小。当电磁吸力减小到小于反作用弹簧的拉力时,动铁心被迫释放,带动主触头、自锁触头同时断开,自动切断主电路和控制电路,电动机失电停转,达到欠压保护的目的。
? ?技术规格 ?外形尺寸 引线接法
? ?接线图 ? ?步进电机是一种专门用于位置和速度精确控制的特种电机。步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。如接收到一串脉冲步进电机将连续运转一段相应距离。同时可通过控制脉冲频率,直接对电机转速进行控制。由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。 步进电机的种类和特点 步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
* 反应式 定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。 * 永磁式 永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。 * 混合式 混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。 其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。 按定子上绕组来分,共有二相、三相和五相等系列。最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达256倍(0.007°/微步)。由于摩擦力和制造精度等原因,实际控制精度略低。 同一步进电机可配不同细分的驱动器以改变精度和效果。 雷赛步进电机系列 雷赛两相、三相混合式步进电机,采用优质冷轧钢片和耐高温永磁体制造,产品规格涵盖35-130范围。具有温升低、可靠性高的特点,由于其具有良好的内部阻尼特性,因而运行平稳,无明显震荡区。可满足不同行业、不同环境下的使用需求。 雷赛采用专利技术研发的三相步进电机驱动系统,更好地解决了传统步进电机低速爬行、有共振区、噪音大、高速扭矩小、起动频率低和驱动器可靠性差等缺点,具有交流伺服电机的某些运行特性,其运行效果可与进口产品相媲美。 两相步进电机命名规则 <>
三相异步电动机正反转控制电路图原理及plc接线与编程在图1是三相异步电动机正反转控制的电路和继电器控制电路图,图2与3是功能与它相同的PLC控制系统的外部接线图和梯形图,其中,KM1和KM2分别是控制正转运行和反转运行的交流接触器. 在梯形图中,用两个起保停电路来分别控制电动机的正转和反转。按下正转启动按钮SB2,X0变ON,其常开触点接通,Y0的线圈“得电”并自保。使KM1的线圈通电,电机开始正转运行。按下停止按钮SB1,X2变ON,其常闭触点断开,使Y0线圈“失电”,电动机停止运行。 在梯形图中,将Y0与Y1的常闭触电分别与对方的线圈串联,可以保证他们不会同时为ON,因此KM1和KM2的线圈不会同时通电,这种安全措施在继电器电路中称为“互锁”。除此之外,为了方便操作和保证Y0和Y1不会同时为ON,在梯形图中还设置了“按钮互锁”,即将反转启动按钮X1的常闭点与控制正转的Y0的线圈串联,将正转启动按钮X0的常闭触点与控制反转的Y1的线圈串联。设Y0为ON,电动机正转,这是如果想改为反转运行,可
以不安停止按钮SB1,直接安反转启动按钮SB3,X1变为ON,它的常闭触点断开,使Y0线圈“失电”,同时X1的敞开触点接通,使Y1的线圈“得电”,点击正转变为反转。 在梯形图中的互锁和按钮联锁电路只能保证输出模块中的与Y0和Y1对应的硬件继电器的常开触点心不会同时接通。由于切换过程中电感的延时作用,可能会出现一个触点还未断弧,另一个却已合上的现象,从而造成瞬间短路故障。 可以用正反转切换时的延时来解决这一问题,但是这一方案会增大编程的工作量,也不能解决不述的接触触点故障引起的电源短路事故。如果因主电路电流过大或者接触器质量不好,某一接触器的主触点被断电时产生的电弧熔焊而被粘结,其线圈断电后主触点仍然是接通的,这时如果另一个接触器的线圈通电,仍将造成三相电源短路事故。为了防止出现这种情况,应在PLC外部设置KM1和KM2的辅助常闭触点组成的硬件互锁电路(见图2),假设KM1的主触点被电弧熔焊,这时它与KM2线圈串联的辅助常闭触点处于断开状态,因此KM2的线圈不可能得电。 图1中的FR是作过载保护用的热继电器,异步电动机长期严重过载时,经过一定延时,热继电器的常开触点断开,常开触点闭合。其常闭触点与接触器的线圈串联,过载时接触其线圈断电,电机停止运行,起到保护作用。 有的热继电器需要手动复位,即热继电器动作后要按一下它自带的复位按钮,其触点才会恢复原状,及常开触点断开,常闭触点闭合。这种热继电器的常闭触点可以像图2那样接在PLC的输出回路,仍然与接触器的线圈串联,这反而可以节约PLC的一个输入点。 有的热继电器有自动复位功能,即热继电器动作后电机停止转,串接在主回路中的热继电器的原件冷却,热继电器的触点自动恢复原状。如果这种热断电器的常闭触点仍然接在PLC的输出回路,电机停止转动后果一段时间会因热继电器的触点恢复原状而自动重新运转,可能会造成设备和人身事故。因此有自动复位功能的热继电器的常闭触点不能接在PLC的输出回路,必须将它的触点接在PLC的输入端(可接常开触点或常闭触点),用梯形图来实现点击的过载保护。如果用电子式电机过载保护来代替热继电器,也应注意它的复位. 电动机正反转实物接线图
三相异步电动机的正确接线 万里安徽省广德县供电局(242200) 大多数电工都知道,三相电动机的三相定子绕组每相绕组都有两个引出线头。一头叫做首端,另一头叫末端。规定第一相绕组首端用D 1表示,末端用D 4表示;第二相绕组首端用D2表示,末端用D5表示;第三相绕组首末端分别用D3和D6来表示。这六个引出线头引入接线盒的接线柱上,接线柱相应地标出D1~D6的标记,见图(1)。三相定子绕组的六根端头可将三相定子绕组 接成星形或三角形,星形接法是将三相绕组的末端并联起来,即将D 4、D 5 、D 6 三个接线柱用铜片连结在一起,而将三相绕组首端分别接入三相交流电源,即 将D 1、D 2 、D 3 分别接入A、B、C相电源,如图(2)所示。而三角形接法则是将第 一相绕组的首端D 1与第三相绕组的末端D 6 相连接,再接入一相电源;第二 相绕组的首端D 2与第一相绕组的末端D 4 相连接,再接入第二相电源;第三相绕 组的首端D 3与第二相绕组的末端D 5 相连接,再接入第三相电源。即在接线板上 将接线柱D 1和D 6 、D 2 和D 4 、D 3 和D 5 分别用铜片连接起来,再分别接入三相电源, 如图(3)所示。一台电动机是接成星形还是接成三角形,应视厂家规定而进行,可以从电动机铭牌上查到。三相定子绕组的首末端是生产厂家事先设定好的,绝不可任意颠倒,但可将三相绕组的首末端一起颠倒,例如将三相绕组的末端 D 4、D 5 、D 6 倒过来作为首端,而将D 1 、D 2 、D 3 作为末端,但绝不可单独将一相绕组 的首末端颠倒,否则将产生接线错误。如果接线盒中发生接线错误,或者绕组首末端弄错,轻则电动机不能正常起动,长时间通电造成启动电流过大,电动机发热严重,影响寿命,重则烧毁电动机绕组,或造成电源短路。下面就绕组接线错误予以具体的分析。 1错将应接成星形运行的异步电动机接成三角形运行时的不良后果。 一台应接成星形动行的电动机,其定子每相绕组承受的电压(相电压)是电动机额定电压( 电源线电压)的1/倍(即0.58倍)。若误接成三角形运行,其
三相异步电动机接线图 2010年02月25日星期 10:49 A.M. 三相异步电机接线图:三相电动机的三相定子绕组每相绕组都有两个引出线头。 一头叫做首端,另一头叫末端。规定第一相绕组首端用D 1表示,末端用D 4表示;第二相绕组首端用D2表示,末端用D5表示;第三相绕组首末端分别用D3和D6来表示。这六个引出线头引入接线盒的接线柱上,接线柱相应地标出D1~D6的标记,见图(1)。三相定子绕组的六根端头可将三相定子绕组接成星形或三角形,星形接法是将三相绕组的末端并联起来,即将D4、D5、D6三个接线柱用铜片连结在一起,而将三相绕组首端分别接入三相交流电源,即将D1、D2、D3分别接入A、B、C相电源,如图(2)所示。而三角形接法则是将第一相绕组的首端D 1与第三相绕组的末端D6相连接,再接入一相电源;第二相绕组的首端D2与第一相绕组的末端D4相连接,再接入第二相电源;第三相绕组的首端D3与第二相绕组的末端D5相连接,再接入第三相电源。即在接线板上将接线柱D1和D6、D2和D4、D3和D5分别用铜片连接起来,再分别接入三相电源,如图(3)所示。一台电动机是接成星形还是接成三角形,应视厂家规定而进行,可以从电动机铭牌上查到。三相定子绕组的首末端是生产厂家事先设定好的,绝不可任意颠倒,但可将三相绕组的首末端一起颠倒,例如将三相绕组的末端D4、D5、D6倒过来作为首端,而将D1、D2、D3作为末端,但绝不可单独将一相绕组的首末端颠倒,否则将产生接线错误。如果接线盒中发生接线错误,或者绕组首末端弄错,轻则电动机不能正常起动,长时间通电造成启动电流过大,电动机发热严重,影响寿命,重则烧毁电动机绕组,或造成电源短路。
2相四线,四相五线,四相六线步进电机接线及驱动方法 分类:单片机2010-07-18 09:24 5085人阅读评论(9) 收藏举报 步进电机原理 按照常理来说,步进电机接线要根据线的颜色来区分接线。但是不同公司生产的步进电机,线的颜色不一样。特别是国外的步进电机。 那么,步进电机接线应该用万用表打表。 步进电机内部构造如下图:
通过上图可知,A,~A是联通的,B和~B是联通。那么,A和~A是一组a,B和~B是一组b。 不管是两相四相,四相五线,四相六线步进电机。内部构造都是如此。至于究竟是四线,五线,还是六线。就要看A和~A之间,B和B~之间有没有公共端com抽线。如果a组和b组各自有一个com端,则该步进电机六线,如果a和b组的公共端连在一起,则是5线的。 所以,要弄清步进电机如何接线,只需把a组和b组分开。用万用表打。 四线:由于四线没有com公共抽线,所以,a和b组是绝对绝缘的,不连通的。所以,用万用表测,不连通的是一组。 五线:由于五线中,a和b组的公共端是连接在一起的。用万用表测,当发现有一根线和其他几根线的电阻是相当的,那么,这根线就是公共com端。对于驱动五线步进电机,公共com端不连接也是可以驱动步进电机的。 六线:a和b组的公共抽线com端是不连通的。同样,用万用表测电阻,发现其中一根线和其他两根线阻止是一样的,那么这根线是com端,另2根线就属于一组。对于驱动四相六线步进电机,两根公共com端不接先也可以驱动该步进电机的。 步进电机相关概念 相数:产生不同对极N、S磁场的激磁线圈对数。常用m表示。 拍数:完成一个磁场周期性变化所需脉冲数或导电状态用n表示,或指电机转过一个齿距角所需脉冲数,以四相电机为例,有四相四拍运行方式即AB-BC-CD-DA-AB,四相八拍运行方式即A-AB-B-BC-C-CD-D-DA-A. 步距角:对应一个脉冲信号,电机转子转过的角位移用θ表示。θ=360度(转子齿数J*运行拍数),以常规二、四相,转子齿为50齿电机为例。四拍运行时步距角为θ=360度/(50*4)=1.8度(俗称整步),八拍运行时步距角为θ=360度/(50*8)=0.9度(俗称半步)。 定位转矩:电机在不通电状态下,电机转子自身的锁定力矩(由磁场齿形的谐波以及机械误差造成的) 静转矩:电机在额定静态电作用下,电机不作旋转运动时,电机转轴的锁定力矩。此力矩是衡量电机体积(几何尺寸)的标准,与驱动电压及驱动电源等无关。 步进电机驱动 驱动步进电机,无非是给电机a和b组先轮流给连续的脉冲,步进电机就可以驱动了。 步进电机驱动码:
Schaltbild Circuit diagram Schéma de branchement Seite1 von 2 Page 1 of 2 Page 1 de 2 09 768 587 AT 127 Bremsgleichrichter BG oder BGE Wechselstromseitiges Ausschalten Normales Einfallen der Bremse Bremsgleichrichter BG oder BGE Gleichstrom- und wechselstromseitiges Ausschalten Schnelles Einfallen der Bremse Steuerger?t BSG Für Gleichspannungsanschluss 24V- Brake rectifier BG or BGE Switch off in the AC circuit Normal brake reaction Brake rectifier BG or BGE Simultaneous switch off in the AC and DC circuits Rapid brake reaction Control Unit BSG For DC supply 24V DC Redresseur de frein BG ou BGE Coupure du frein c?té courant alternatif Freinage normal Redresseur de frein BG ou BGE Coupure du frein c?té courant alternatif et redressé Commande de frein BSG Pour alimentation en tension continue 24V- RD = rot / red / rouge BU = blau / blue / bleu 1) Bremsspule 2) Zum Lüften der Bremse Spannung anlegen (siehe Typenschild). Kontakte arbeiten parallel mit Motorschütz. 1) Brake coil 2) To release the brake, apply the voltage as shown on nameplate. Contacts operate in parallel to motor switch contactor. 1) Bobine de frein 2) Pour débloquer le frein, appliquer la tension indiquée sur la plaque signalétique. Le contact à fermeture travaille en parallèle avec le contacteur moteur. Kontaktbelastbarkeit der Bremsschütze: AC3 nach EN 60947-4- 1 Contact rating for the brake switch contactors: AC3 as per EN 60947-4-1 Capacité de charge des contacteurs frein: AC3 selon EN 60947-4-1 Die Spannung kann wie folgt entnommen werden: a) durch separate Zuleitung. b) von der Motor-Klemmenplatte -jedoch nicht bei polumschaltbaren und frequenzgeregelten Motoren The voltage can be sourced as follows: a) by separate leads b) from the motor terminal board, however, not for two speed or frequency inverter controlled motors La tension peut être prélevée de la facon suivante : a) par conducteurs externes b) à partir de la plaque à bornes du moteur- à l’exception des moteurs à p?les commutables et des moteurs à régulation par convertisseur de fréquence
三相异步电机接线方法 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理!更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展. 三相异步电动机的接线方法有两种,一种是三角形接线,用符号“△”表示;另一种是星形接线,用符号“Y”表示。 所谓三角形接线是把接线盒的六个接线柱中,上下两柱用金属片连接起来后,再分别接电源,如图3-3 (a)所示。所谓星形接线是把上面三个接线柱用金属片连接起来,下面三个接线柱再分别接电源,如图3-3 (b)所示。 图3-2 接线盒中六个线头排列示意图 图3-3 电动机绕组三角形或星形接线
电动机三相绕组究竟按何种方式连接,要看铭牌标明的电压和接线方式,如果铭牌上标着电压220/3 80V,接法△/Y,表明该台电动机有两种接线方式,适应两种不同的电压。如果电源电压是220V,就应接成三角形。如误接成星形,就会使接到每相绕组上的电压由220V下降到220/√3=127V,电动机就会因电压太低起动不起来,如仍承受额定负载,就容易造成过载烧毁。如果电源电压是380V,就应接成星形,如误接成三角形,每相绕组就会承受380V的电压而造成定子电流增大烧毁绕组。所以正确的接线方式,应能使电动机在正常工作时,所承受的电源电压必须等于或接近于电动机的额定电压。 内容来源网络,由“深圳机械展(11万㎡,1100多家展商,超10万观众)”收集整理!更多cnc加工中心、车铣磨钻床、线切割、数控刀具工具、工业机器人、非标自动化、数字化无人工厂、精密测量、3D打印、激光切割、钣金冲压折弯、精密零件加工等展示,就在深圳机械展.
电磁调速电动机接线图 电磁调速电动机是由滑差离合器和一般异步电动机结合在一起组成的,在规定的围,它能实现均匀连续无极调速。 电磁调速控制器:7芯接线(1、2、3、4、5、6、7) 电磁调速电动机:5端子(励磁线圈:F1、F2、测速发电机:U、V、W) 电磁调速控制器1、2接220V电源相线和零线;3、4(两根粗的)接励磁线圈F1、F2;5、6、7接电磁调速电机的测速发电机U、V、W 一般异步电动机:U、V、W通过接触器接电源R 、S、T。 JDIA型电磁调速电动机控制器是原机械工业部全国联合(统一)设计产品,用于电磁调速电动机(滑差电机)的调速控制。实现恒转矩无级调速。 一、型号含义:
二、使用条件: 1、海拔不超过1000m。 2、周围环境温度;-5℃-+40℃。 3、相对湿度不超过90%(20℃以下时)。 4、振动频率10-15OHz时,其最大振动加速度应不超过0.5g。 5、电网电压幅位波动±10%额定值时、保证额定使用。 6、周围介质没有导电尘埃和能腐蚀金属和破坏绝缘的气体。 三、主要技术数据: 3.1手操普通型(见下表) 四、基本工作原理:
从图1方框图可知,控制器由可控硅主回路、给定电路、触发电路、测速负反馈电路等环节组成。 主回路:采用可控硅半波直流电路。由于励磁线圈是一个电感性负载,为了让电流连续,因此在励磁线圈前并联一个续6R二级管(C2)。 主回路的保护装置:用熔断器(RD)进行短路保护,用压敏电阻1(Rv)进行交流侧浪涌电压保。 给定电路:4w交流电压由变压器副边经BZ01桥式整流,Rl、cl、C2兀型滤波后,以WD2WD1,稳压管加到给定电位器w1,两端。 测速负反馈电路:测速发电机三相(或单相)电压经D6×6桥式整流后由C3滤波加到反馈电位器W2二端,此直流电压随调速电机的转速变化成线性变化,作为速度反馈信号与给定信号相比较,由于它的极性是与给定信号电压相反的,它的增加将减少综合信号(等于给定信号反馈信号),即起书负反锁的作用
步进电机接线图 Final revision by standardization team on December 10, 2020.
接线图 适配驱动器 电机型号 适配驱动器 57HS04 DM422C/DM432C/DM556/DM856/M752/M542/M860/M880A/ MA550/MA860/H850/ND556/ND882/M415B/M325 57HS06 57HS09 57HSM09 57HS13 DM556/DM856/M752/M542/M860/M880A/MA550/MA860/H850/ND556/ND88 2 57HS22 步进电机是一种专门用于位置和速度精确控制的特种电机。步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。如接收到一串脉冲步进电机将连续运转一段相应距离。同时可通过控制脉冲频率,直接对电机转速进行控制。由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近 年来在各行各业的控制设备中获得了越来越广泛的应用。 步进电机的种类和特点 步进电机在构造上有三种主要类型:反应式(Variable Reluctance ,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。 * 反应式
定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达°、但动态 性能差、效率低、发热大,可靠性难保证。 * 永磁式 永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为°或15°)。 * 混合式 混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。其特点是输出力矩大、动态性能好, 步距角小,但结构复杂、成本相对较高。 按定子上绕组来分,共有二相、三相和五相等系列。最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为°/步,配上半步驱动器后,步距角减少为°,配上细分驱动器后其步距角可细分达256倍°/微步)。由于摩擦力和制造精度等原因,实际控制精度略低。同一步进 电机可配不同细分的驱动器以改变精度和效果。 雷赛步进电机系列 雷赛两相、三相混合式步进电机,采用优质冷轧钢片和耐高温永磁体制造,产品规格涵盖35 -130范围。具有温升低、可靠性高的特点,由于其具有良好的内部阻尼特性,因而运行平稳,无明显震荡区。可满足不同行业、不同环境下的使用需求。