沉箱式防波堤的稳定性分析
杨俊杰,苗 笛
(天津港工程监理咨询有限公司,天津 300456)
摘要:运用有限元方法和动力分析方法,对沉箱式防波堤在近破波作用下的动力响应进行了研究。在确定滑移位移和转角为防波堤的主要参考动力响应参量的情况下,对能够产生运动的滑移和摇摆两种运动形式进行了动力分析,并提出了滑移位移和转角随时间历程的变化趋势。
关键词:近破波;沉箱式防波堤;有限元分析;动力响应;滑移;摇摆
中图分类号:U 656.201;U 656.22 文献标识码:A 文章编号:1004-9592(2007)04-0019-03
The Stability Analsis of Caisson Breakwater
YA N G Jun -Jie,M IA O Di
(Tianjin Port Engineering Supervisory &Consultant Co.,Ltd.,Tianjin 300456,China)
Abstract:In the traditional desig n metho d o f breakw ater s,breaking w ave pressure w hich apply to sta -bility checking com putations is considered as a static force,and dynam ic characteristics of breaking w ave and breakw ater motion are neglected.In this paper,the dy nam ic responses of caisson br eakw ater under w av e fo rces are studied through finite cell sim ulation and dynamic analysis means.And in this paper,slip -page and w ag gle tw o athletics for ms w hich can bring athletics are put up dy namic analy zing by confir ming slipping replacement and corner to be mostly consult dy namic r espo nse par am eter of the breakw ater.Put fo rw ard to slip to mov e the v ar iety trend that m oves and acts any time turn the Cape a process.
Key words:breaking w ave;caisson breakw ater;finite element analy sis;dynamic response;slippag e;w ag gle
收稿日期:2007-06-19作者简介:杨俊杰(1980-),男,工程师,主要从事工程监理工作。
1 概述
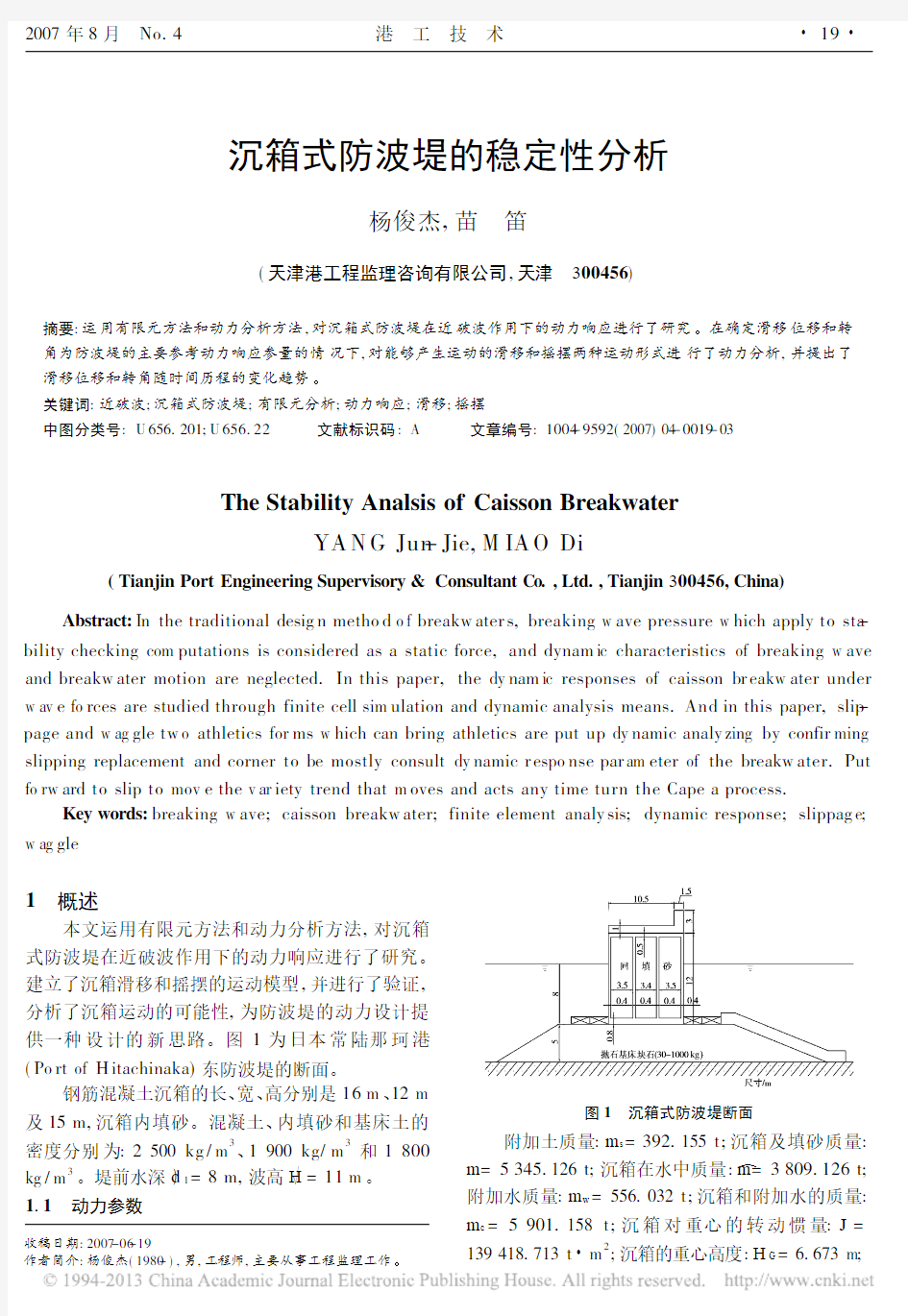
本文运用有限元方法和动力分析方法,对沉箱式防波堤在近破波作用下的动力响应进行了研究。建立了沉箱滑移和摇摆的运动模型,并进行了验证,分析了沉箱运动的可能性,为防波堤的动力设计提供一种设计的新思路。图1为日本常陆那珂港(Po rt of H itachinaka)东防波堤的断面。 钢筋混凝土沉箱的长、宽、高分别是16m 、12m 及15m,沉箱内填砂。混凝土、内填砂和基床土的密度分别为:2500kg /m 3
、1900kg/m 3
和1800kg /m 3。堤前水深 d 1=8m,波高 H =11m 。1.1
动力参数
图1 沉箱式防波堤断面
附加土质量:m s =392.155t;沉箱及填砂质量:
m =5345.126t;沉箱在水中质量: m =3809.126t;附加水质量:m w =556.032t;沉箱和附加水的质量:m c =5901.158t;沉箱对重心的转动惯量:J =139418.713t m 2;沉箱的重心高度:H G =6.673m;
19 2007年8月 No.4 港 工 技 术
沉箱与基床之间的摩擦系数:0.5013;沉箱的弹性模量:2000M Pa;沉箱与基床的泊松比:0.3;基床的弹性模量:200M Pa;地基的弹性模量:50M Pa;地基的泊松比:0.4。1.2 波浪参数
本算例中,波浪力采用一般正弦函数。适当选取水平波浪力和相对应的浮托力,计算过程中通过改变相应的参数或者改变力的作用位置和大小来观察历时过程中的沉箱位移和转角的变化。
2 建立模型并进行网格划分
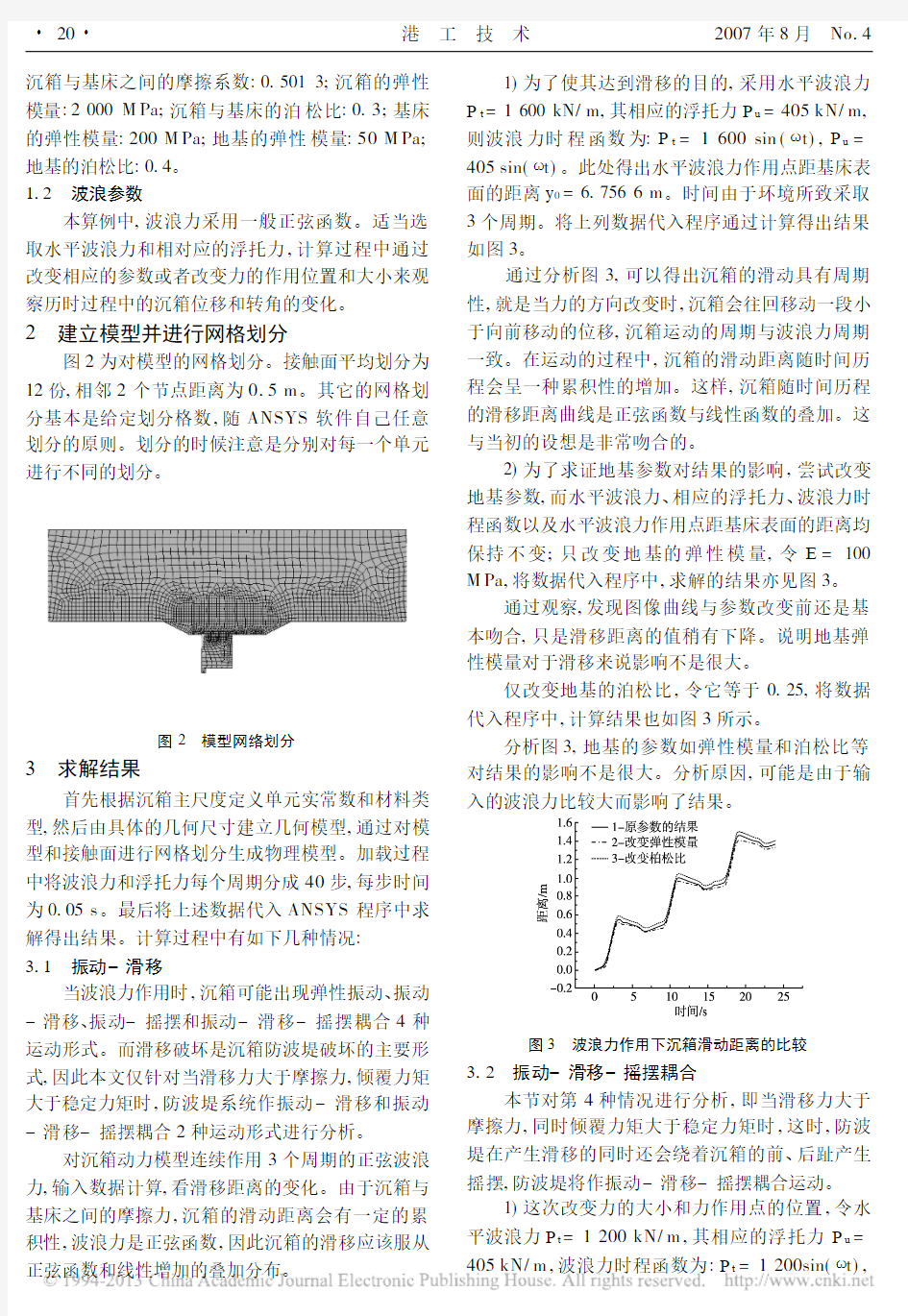
图2为对模型的网格划分。接触面平均划分为12份,相邻2个节点距离为0.5m 。其它的网格划分基本是给定划分格数,随ANSYS 软件自己任意划分的原则。划分的时候注意是分别对每一个单元
进行不同的划分。
图2 模型网络划分
3 求解结果
首先根据沉箱主尺度定义单元实常数和材料类型,然后由具体的几何尺寸建立几何模型,通过对模型和接触面进行网格划分生成物理模型。加载过程中将波浪力和浮托力每个周期分成40步,每步时间为0.05s 。最后将上述数据代入ANSYS 程序中求解得出结果。计算过程中有如下几种情况:3.1 振动-滑移
当波浪力作用时,沉箱可能出现弹性振动、振动-滑移、振动-摇摆和振动-滑移-摇摆耦合4种运动形式。而滑移破坏是沉箱防波堤破坏的主要形式,因此本文仅针对当滑移力大于摩擦力,倾覆力矩大于稳定力矩时,防波堤系统作振动-滑移和振动-滑移-摇摆耦合2种运动形式进行分析。
对沉箱动力模型连续作用3个周期的正弦波浪力,输入数据计算,看滑移距离的变化。由于沉箱与基床之间的摩擦力,沉箱的滑动距离会有一定的累积性,波浪力是正弦函数,因此沉箱的滑移应该服从
正弦函数和线性增加的叠加分布。
1)为了使其达到滑移的目的,采用水平波浪力P t =1600kN/m,其相应的浮托力P u =405kN/m,则波浪力时程函数为:P t =1600sin ( t),P u =405sin( t)。此处得出水平波浪力作用点距基床表面的距离y 0=6.7566m 。时间由于环境所致采取3个周期。将上列数据代入程序通过计算得出结果如图3。
通过分析图3,可以得出沉箱的滑动具有周期性,就是当力的方向改变时,沉箱会往回移动一段小于向前移动的位移,沉箱运动的周期与波浪力周期一致。在运动的过程中,沉箱的滑动距离随时间历程会呈一种累积性的增加。这样,沉箱随时间历程的滑移距离曲线是正弦函数与线性函数的叠加。这与当初的设想是非常吻合的。
2)为了求证地基参数对结果的影响,尝试改变地基参数,而水平波浪力、相应的浮托力、波浪力时程函数以及水平波浪力作用点距基床表面的距离均保持不变;只改变地基的弹性模量,令E =100M Pa,将数据代入程序中,求解的结果亦见图3。 通过观察,发现图像曲线与参数改变前还是基本吻合,只是滑移距离的值稍有下降。说明地基弹性模量对于滑移来说影响不是很大。
仅改变地基的泊松比,令它等于0.25,将数据代入程序中,计算结果也如图3所示。
分析图3,地基的参数如弹性模量和泊松比等对结果的影响不是很大。分析原因,可能是由于输入的波浪力比较大而影响了结果。
图3 波浪力作用下沉箱滑动距离的比较
3.2 振动-滑移-摇摆耦合
本节对第4种情况进行分析,即当滑移力大于摩擦力,同时倾覆力矩大于稳定力矩时,这时,防波堤在产生滑移的同时还会绕着沉箱的前、后趾产生摇摆,防波堤将作振动-滑移-摇摆耦合运动。 1)这次改变力的大小和力作用点的位置,令水平波浪力P t =1200kN/m ,其相应的浮托力P u =405kN/m ,波浪力时程函数为:P t =1200sin( t),
20 港 工 技 术 2007年8月 No.4
P u =405sin( t)。时间还是3个周期,输入数据得出沉箱的第1个节点的滑动距离(图4)。图5为沉箱最上边的顶点的滑动距离
。
图4 沉箱节点1
的滑动距离
图5 顶点的滑动距离
用顶点的滑动距离减去节点1的滑动距离,除圆周率,再乘180就能得到沉箱的转角。得到的沉箱转角如图6
。
图6 沉箱转角
分析图6,我们知道由于波浪力和浮托力是一般正弦函数,得出的沉箱转角也符合正弦分布。可以看出在周期力的作用下,沉箱绕前后趾成周期性的摇摆,摇摆周期与波浪力的周期是一致的。
2)同样,改变地基的弹性模量,令E =100MPa,而其他参数不变。将数据代入程序中求解,得出沉箱的转角变化曲线如图7所示。
分析图7,在改变地基弹性模量以后,沉箱摇摆的转角发生较大的变化,峰值增大很多,说明地基的
弹性模量对结果的影响较大。
图7 沉箱转角
3)改变地基的泊松比,令其等于0.25,其他参数不变。将数据代入程序中求解,得出沉箱的转角
变化曲线如图8所示。
图8 沉箱转角
通过分析发现,地基泊松比的改变对结果的影响是很大的。在沉箱式防波堤的设计中必须考虑泊松比对沉箱动力稳定性的影响。此外,沉箱与基床的接触面的设定,对结果影响也是很大的。
4 结语
本文引入了波浪力的时程函数,把有限元分析方法引入到实际问题的分析中,利用有限元模型对实际几何形体的模拟,正确地定义接触面。通过调试参数,使得模型的接触面能模拟沉箱的滑动或摇摆。并且充分考虑地基参数对防波堤运动的影响,对防波堤在近破波作用下的动力响应进行了分析。考虑到滑移和摇摆破坏是沉箱式防波堤破坏的主要
形式,对能够产生运动的滑移和摇摆两种运动形式进行了动力分析,提出了滑移位移和转角随时间历程的变化趋势,为以后的动力设计方法提供了理论思路。
但是,由于防波堤处于深水恶劣的海洋环境中,其运动情况是非常复杂的,这就对防波堤的设计理论和方法提出了更高的要求。本文取得了一定的成果,但还有很多的工作需要开展:本文中虽然引入了波浪力的时程函数,但是求解中用的还是一般正弦函数;计算中还有一些参数没作改变;由于时间关系,只计算了3个周期的波浪力的防波堤运动情况。
21 2007年8月 No.4 港 工 技 术
常微分大作业--李雅普诺夫稳定性 11091059洪一洲 从19世纪末以来,李雅普诺夫稳定性理论一直指导着关于稳定性的研究和应用。不少学者遵循李雅普诺夫所开辟的研究路线对第二方法作了一些新的发展。一方面,李雅普诺夫第二方法被推广到研究一般系统的稳定性。例如,1957年,В.И.祖博夫将李雅普诺夫方法用于研究度量空间中不变集合的稳定性。随后,J.P.拉萨尔等又对各种形式抽象系统的李雅普诺夫稳定性进行了研究。在这些研究中,系统的描述不限于微分方程或差分方程,运动平衡状态已采用不变集合表示,李雅普诺夫函数是在更一般意义下定义的。1967年,D.布肖对表征在集合与映射水平上的系统建立了李雅普诺夫第二方法。这时,李雅普诺夫函数已不在实数域上取值,而是在有序定义的半格上取值。另一方面,李雅普诺夫第二方法被用于研究大系统或多级系统的稳定性。此时,李雅普诺夫函数被推广为向量形式,称为向量李雅普诺夫函数。用这种方法可建立大系统稳定性的充分条件。 1.李雅普诺夫稳定性概念 忽略输入后,非线性时变系统的状态方程如下 ),(t x f x = (1) 式中,x 为n 维状态向量;t 为时间变量;),(t x f 为n 维函数,其展开式为 12(,,,,)i i n x f x x x t = n i ,,1 = 假定方程的解为 ),;(00t x t x ,x 0和t 0 分别为初始状态向量和初始时刻,0000),;(x t x t x =。 平衡状态 如果对于所有t ,满足 0),(==t x f x e e (2) 的状态x e 称为平衡状态(又称为平衡点)。平衡状态的各分量不再随时间变化。若已知状态 方程,令0=x 所求得的解x ,便是平衡状态。 对于线性定常系统Ax x = ,其平衡状态满足0=e Ax ,如果A 非奇异,系统只有惟一的零解,即存在一个位于状态空间原点的平衡状态。至于非线性系统,0),(=t x f e 的解可能有多个,由系统状态方程决定。 控制系统李雅普诺夫意义下的稳定性是关于平衡状态的稳定性,反映了系统在平衡状态附近的动态行为。鉴于实际线性系统只有一个平衡状态,平衡状态的稳定性能够表征整个系统的稳定性。对于具有多个平衡状态的非线性系统来说,由于各平衡状态的稳定性一般并不相同,故需逐个加以考虑,还需结合具体初始条件下的系统运动轨迹来考虑。
毕业论文(设计) 题目:青岛港董家口港区防波堤设计 学院:海运与港航建筑工程学院 专业:港口航道与海岸工程 班级: 学号: 学生姓名: 指导教师: 二○一五年五月 青岛港董家口港区防波堤设计 摘要:青岛港董家口港区是散货运输等的重要中转基地,港区位于外海海域,波浪、潮流、风等都是影响港区内船舶泊稳的条件。所以需要修建防波堤,以抵御以上环境对港区正常运行的影响。防波堤的建造,需要考虑到自然条件和堤前水深的影响,合理的对防波堤进行布置。另外,对港区泥沙淤积分析和工程地质分析,使其在今后的运行更加有效和稳定。防波堤的平面布置,我们考虑到最高和最低潮位,通过防波堤施工设计规范,计算堤顶宽度和高度,确定横截面的情况。为了减少波浪力对防波堤冲击,布置人工护面块体消能。最后进行胸墙的稳定、地基稳定性和地基沉降的计算。董家口防波堤地处外海海域,是为了保护港区稳定,免受恶劣天气影响的斜坡式的防波堤。是沿海港口的重要组成部分。 关键词:防波堤;越浪量;胸墙;总体布置
Breakwater design in Dongjiakou district of Qingdao port Abstract: The port of Dongjiakou is an important transit base for bulk cargo transportation,the port is located in the open sea. wave, tide, wind and so on influent the berthing of ships conditions. So it is necessary to build the breakwater, impact against the above environment on the normal operation of the port. The construction of the breakwater, need to take into account the influence of natural conditions and water depth in front of the dike, the reasonable layout of the breakwater. In addition, the analysis of port sediment analysis and engineering geology, make it more effective and stable operation in the future. The plane layout of breakwater, we considered the highest and lowest tidal level, through the design specification of breakwater construction, calculation of crest width and height, determine the cross section of the. In order to reduce the impact of wave force on the breakwater, layout 6T Accropode energy dissipation. Finally, the stability calculation of parapet foundation stability and settlement. Dongjiakou breakwater is located in the sea waters, in order to protect the stability of the port, from the weather sloping breakwater. Is an important part of coastal ports. Keywords: breakwater; wave overtopping; crest wall; general layout 目录 第1章概述------------------------------------------------------ 1 第2章设计条件-------------------------------------------------- 2 地理位置及交通----------------------------------------------- 2 气象--------------------------------------------------------- 2 气温---------------------------------------------------- 2 降水---------------------------------------------------- 2 雾况---------------------------------------------------- 2 风况---------------------------------------------------- 2 工程水文---------------------------------------------------- 3
自适应卡尔曼滤波 卡尔曼滤波发散的原因 如果卡尔曼滤波是稳定的,随着滤波的推进,卡尔曼滤波估计的精度应该越来越高,滤波误差方差阵也应趋于稳定值或有界值。但在实际应用中,随着量测值数目的增加,由于估计误差的均值和估计误差协方差可能越来越大,使滤波逐渐失去准确估计的作用,这种现象称为卡尔曼滤波发散。 引起滤波器发散的主要原因有两点: (1)描述系统动力学特性的数学模型和噪声估计模型不准确,不能直接真实地反映物理过程,使得模型与获得的量测值不匹配而导致滤波发散。这种由于模型建立过于粗糙或失真所引起的发散称为滤波发散。 (2)由于卡尔曼滤波是递推过程,随着滤波步数的增加,舍入误差将逐渐积累。如果计算机字长不够长,这种积累误差很有可能使估计误差方差阵失去非负定性甚至失去对称性,使滤波增益矩阵逐渐失去合适的加权作用而导致发散。这种由于计算舍入误差所引起的发散称为计算发散。 针对上述卡尔曼滤波发散的原因,目前已经出现了几种有效抑制滤波发散的方法,常用的有衰减记忆滤波、限定记忆滤波、扩充状态滤波、有限下界滤波、平方根滤波、和自适应滤波等。这些方法本质上都是以牺牲滤波器的最优性为代价来抑制滤波发散,也就是说,多数都是次优滤波方法。 自适应滤波 在很多实际系统中,系统过程噪声方差矩阵Q和量测误差方差阵R事先是不知道的,有时甚至连状态转移矩阵 或量测矩阵H也不能确切建立。如果所建立的模型与实际模型不符可能回引起滤波发散。自适应滤波就是这样一种具有抑制滤波发散作用的滤波方法。在滤波过程中,自适应滤波一方面利用量测值修正预测值,同时也对未知的或不确切的系统模型参数和噪声统计参数进行估计修正。自适应滤波的方法很多,包括贝叶斯法、极大似然法、相关法与协方差匹配法,其中最基本也是最重要的是相关法,而相关法可分为输出相关法和新息相关法。 在这里只讨论系统模型参数已知,而噪声统计参数Q和R未知情况下的自适应滤波。由于Q和R等参数最终是通过增益矩阵K影响滤波值的,因此进行自适应滤波时,也可以不去估计Q和R等参数而直接根据量测数据调整K就可以了。
水运工程技术规范强制性条文(J6) J6 《防波堤设计与施工规范》(JTJ 298—98) 3.0.5 防波堤结构应进行模型试验验证,当有类似条件下的试验资料时,可不再进行试验。 3.0.7 对于施工过程中未成型的防波堤堤段,应根据实际情况考虑采取必要的防浪措施。 4.2.1 斜坡堤设计应计算以下内容: (1)护面块体的稳定重量和护面层厚度; (2)栅栏板的强度; (3)堤前护底块石的稳定重量; (4)胸墙的强度和抗滑、抗倾稳定性; (5)地基的整体稳定性; (6)地基沉降(确定堤顶预留高度)。 4.2.2* 斜坡堤承载能力极限状态设计时,应以设计波高及对应的波长确定的波浪力作为标准值,并应考虑以下三种设计状况及相应的组合。 4.2.2.1* 持久状况,应考虑以下的持久组合: (1)设计高水位时,波高应采用相应的设计波高; (2)设计低水位时,波高的采用分为以下两种情况:当有推算的外海设计波浪时,应取设计低水位进行波浪浅水变形分析,求出堤前的设计波高;当只有建筑物附近不分水位统计的设计波浪时,可取与设计高水位时相同的设计波高,但不超过低水位时的浅水极限波高; (3)*极端高水位时,波高应采用相应的设计波高。 4.2.2.3* 偶然状况,在进行斜坡堤整体稳定计算时,应考虑地震作用的偶然组合,水位采用设计低水位,不考虑波浪对堤体的作用。 4.2.14* 斜坡堤内坡护面块体的重量应符合下列规定: (1)*当允许少量波浪越过堤顶时,从堤顶到设计低水位之间的内坡护面块体重量,应与外坡护面的块体重量相同;设计低水位以下的内坡护面块体,应按堤内侧波浪进行复核; (2)*当不允许波浪越过堤顶时,内坡护面应按堤内侧波浪进行计算。 4.2.15* 斜坡堤堤顶块体的重量,一般情况下应与外坡的块体重量相同。当堤顶高程在设计高水位以上不足0.2倍设计波高值时,其重量不应小于外坡护面块体重量的1.5 倍。 4.3.3* 可冲刷地基上的斜坡堤,其护面块体或水下棱体的大块石均不应直接抛于海底面上,而应在海底面上设置垫层。 4.3.4* 对采用两层扭工字块体护面的斜坡堤,其港外侧构造应符合下列要求: (1)*当随机安放两层扭工字块体时,其上层应有60%以上的块体保持垂直杆件在堤坡下方,水平杆件在堤坡上方的形式; (2)当为规则安放扭工字块体时,应使全部块体保持垂直杆件在堤坡下方,水平杆件在堤坡上方。4.3.7* 斜坡堤堤头段的构造应符合下列要求: (3)堤头段护面块体的重量应大于堤身外坡护面块体重量,也可将堤头段两侧的坡度适当放缓; (4)堤头段的护底块石重量也应适当加大。 4.3.9 当堤根段出现波能集中时,应对堤根段和相邻的海岸段采取加强措施。 4.3.10 当堤轴线向外拐折形成凹角,造成波能集中时,应采取加强措施。 5.1.5 在非岩石地基上的抛石基床厚度应由计算确定,但对粘土地基厚度不应小于1.5m,砂土地基不应小于1.0m(含碎石垫层0.3m)。岩石地基的抛石基床,厚度不应小于0.5m。 5.2.2* 对重力式直立堤,承载能力极限状态应考虑以下三种设计状况及相应组合。 5.2.2.1* 持久状况,应考虑以下的持久组合: (1)设计高水位时,波高采用相应的设计波高;
10.6 卡尔曼滤波器简介 本节讨论如何从带噪声的测量数据把有用信号提取出来的问题。通常,信号的频谱处于有限的频率范围内,而噪声的频谱则散布在很广的频率范围内。如前所述,为了消除噪声,可以把 FIR滤波器或IIR滤波器设计成合适的频带滤波器,进行频域滤波。但在许多应用场合,需要进行时域滤波,从带噪声的信号中提取有用信号。虽然这样的过程其实也算是对信号的滤波,但所依据的理论,即针对随机信号的估计理论,是自成体系的。人们对随机信号干扰下的有用信号不能“确知”,只能“估计”。为了“估计”,要事先确定某种准则以评定估计的好坏程度。最小均方误差是一种常用的比较简单的经典准则。典型的线性估计器是离散时间维纳滤波器与卡尔曼滤波器。 对于平稳时间序列的最小均方误差估计的第一个明确解是维纳在1942年2月首先给出的。当时美国的一个战争研究团体发表了一个秘密文件,其中就包括维纳关于滤波问题的研究工作。这项研究是用于防空火力控制系统的。维纳滤波器是基于最小均方误差准则的估计器。为了寻求维纳滤波器的冲激响应,需要求解著名的维纳-霍夫方程。这种滤波理论所追求的是使均方误差最小的系统最佳冲激响应的明确表达式。这与卡尔曼滤波(Kalman filtering)是很不相同的。卡尔曼滤波所追求的则是使均方误差最小的递推算法。 在维纳进行滤波理论研究并导出维纳-霍夫方程的十年以前,在1931年,维纳和霍夫在数学上就已经得到了这个方程的解。 对于维纳-霍夫方程的研究,20世纪五十年代涌现了大量文章,特别是将维纳滤波推广到非平稳过程的文章甚多,但实用结果却很少。这时正处于卡尔曼滤波问世的前夜。 维纳滤波的困难问题,首先在上世纪五十年代中期确定卫星轨道的问题上遇到了。1958年斯韦尔林(Swerling)首先提出了处理这个问题的递推算法,并且立刻被承认和应用。1960年卡尔曼进行了比斯韦尔林更有意义的工作。他严格地把状态变量的概念引入到最小均方误差估计中来,建立了卡尔曼滤波理论。空间时代的到来推动了这种滤波理论的发展。 维纳滤波与卡尔曼滤波所研究的都是基于最小均方误差准则的估计问题。 维纳滤波理论的不足之处是明显的。在运用的过程中,它必须把用到的全部数据存储起来,而且每一时刻都要通过对这些数据的运算才能得到所需要的各种量的估值。按照这种滤波方法设置的专用计算机的存储量与计算量必然很大,很难进行实时处理。虽经许多科技工作者的努力,在解决非平稳过程的滤波问题时,给出能用的方法为数甚少。到五十年代中期,随着空间技术的发展,这种方法越来越不能满足实际应用的需要,面临了新的挑战。尽管如此,维纳滤波理论在滤波理论中的开拓工作是不容置疑的,维纳在方法论上的创见,仍然影响着后人。 五十年代中期,空间技术飞速发展,要求对卫星轨道进行精确的测量。为此,人们将滤波问题以微分方程表示,提出了一系列适应空间技术应用的精练算法。1960年
第3章李亚普诺夫法稳定性分析 第1节基本概念 1.系统的平衡状态 设系统的齐次状态方程为 x= f ), (t x 若存在状态e x,对所有t都满足0 ), x e x f (= =t ,则称e x为系统的平衡状态。 一个系统,不一定都存在平衡状态;如存在,也不一定唯一;多个平衡状态,可能连续,也可能孤立。一般只研究孤立平衡状
态。 一般地,0≠e x ,此时可通过平移变换e x x x =-使(,)x f x t =的平衡点0e x =。故一般只研究0=e x (原点)处的稳定性。 一般地,认为0t t =时刻扰动消失,此时系统初始状态为0e x x ≠。 2.系统的稳定性 系统受到扰动后其状态将偏离原平衡状态e x 。系统稳定性表示扰动消失后系统在平衡状态(原e x 或新e x )下继续工作的能力。 稳定性是系统的一种内部属性,可采用齐次状态方程 ),(t x f x = 通过00≠x ,0t t ≥的自由运动进行研究。 稳定性是针对平衡点而言的。 对0≠A 的线性定常系统,只有一个平衡点=0e x ,平衡点的稳定性与系统稳定性是统一的。
对多平衡点系统,不同的平衡点可能具有不同的稳定性,不存在统一的系统稳定性问题,必须逐一分析各平衡点的稳定性。3.李亚普诺夫关于稳定性的定义 状态x到e x的距离(欧几里德范数): 2/1 2 2 1 1 ] ) ( ) [(ne n e e x x x x x x- + + - = - ε ≤ -e x x称为e x的邻域(以e x为中心、ε为半径的超球体) (ε s x∈)。 李亚普诺夫关于稳定性的定义: 对任意实数0 > ε,总存在0 ) , ( > t ε δ 。当δ < -e x x0时,系统), (t x f x= 自0x出发的状态轨迹)(t x( t t≥): 1)若满足ε ≤ - ∞ → e t x x lim,称系统在e x处李亚普诺夫稳定; 2)若满足0 lim= - ∞ → e t x x,称系统在e x处渐近稳定;
第六章 李雅普诺夫稳定性分析 在反馈控制系统的分析设计中,系统的稳定性是首先需要考虑的问题之一。因为它关系到系统是否能正常工作。 经典控制理论中已经建立了劳斯判据、Huiwitz 稳定判据、Nquist 判据、对数判据、根轨迹判据等来判断线性定常系统的稳定性,但不适用于非线性和时变系统。分析非线性系统稳定性及自振的描述函数法,则要求系统的线性部分具有良好的滤除谐波的性能;而相平面法则只适合于一阶、二阶非线性系统。 1892年俄国学者李雅普诺夫(Lyapunov )提出的稳定性理论是确定系统稳定性的更一般的理论,它采用状态向量来描述,不仅适用于单变量、线性、定常系统,还适用于多变量、非线性、时变系统。 §6-1 外部稳定性和内部稳定性 系统的数学模型有输入输出描述(即外部描述)和状态空间描述(即内部描述),相应的稳定性便分为外部稳定性和内部稳定性。 一、外部稳定性 1、定义(外部稳定性): 若系统对所有有界输入引起的零状态响应的输出是有界的,则称该系统是外部稳定的。 (外部稳定性也称为BIBO (Bounded Input Bounded Output )稳定性) 说明: (1)所谓有界是指如果一个函数)(t h ,在时间区间],0[∞中,它的幅值不会增至无穷,即存在一个实 常数k ,使得对于所有的[]∞∈0 t ,恒有∞<≤k t h )(成立。 (2)所谓零状态响应,是指零初始状态时非零输入引起的响应。 2、系统外部稳定性判据 线性定常连续系统 ∑),,(C B A 的传递函数矩阵为 Cx y Bu Ax x =+= BU A sI X BU X A sI CX Y BU AX sX 1)()(--==-=+= B A sI C s G 1 )()(--= 当且仅当)(s G 极点都在s 的左半平面内时,系统才是外部稳定(或BIBO 稳定)的。
2015.12.12 void Kalman_Filter(float Gyro,float Accel) { Angle+=(Gyro - Q_bias) * dt; Pdot[0]=Q_angle - PP[0][1] - PP[1][0]; Pdot[1]= - PP[1][1]; Pdot[2]= - PP[1][1]; Pdot[3]=Q_gyro; PP[0][0] += Pdot[0] * dt; PP[0][1] += Pdot[1] * dt; PP[1][0] += Pdot[2] * dt; PP[1][1] += Pdot[3] * dt; Angle_err = Accel - Angle; PCt_0 = C_0 * PP[0][0]; PCt_1 = C_0 * PP[1][0]; E = R_angle + C_0 * PCt_0; K_0 = PCt_0 / E; K_1 = PCt_1 / E; t_0 = PCt_0; t_1 = C_0 * PP[0][1]; PP[0][0] -= K_0 * t_0; PP[0][1] -= K_0 * t_1; PP[1][0] -= K_1 * t_0; PP[1][1] -= K_1 * t_1; Angle += K_0 * Angle_err; Q_bias += K_1 * Angle_err; Gyro_x = Gyro - Q_bias; }
首先是卡尔曼滤波的5个方程: (|1)(1|1)()X k k AX k k Bu k -=--+(1)先验估计 (|1)(1|1)'P k k AP k k A Q -=--+(2)协方差矩阵的预测 ()(|1)'/(|1)') Kg k P k k H HP k k H R =--+(3)计算卡尔曼增益 (|)(|1)()(()(|1)) X k k X k k Kg k Z k HX k k =-+--(4)进行修正 5个式子比较抽象,现在直接用实例来说: 一、卡尔曼滤波第一个式子 对于角度来说,我们认为此时的角度可以近似认为是上一时刻的角度值加上上一时刻陀螺仪测得的角加速度值乘以时间,因为d dt θω=?,角度微分等于时间的微分乘以角速度。但是陀螺仪有个静态漂移(而且还是变化的),静态漂移就是静止了没有角速度然后陀螺仪也会输出一个值,这个值肯定是没有意义的,计算时要把它减去。 由此我们得到了当前角度的预测值Angle Angle=Angle+(Gyro - Q_bias) * dt; 其中等号左边Angle 为此时的角度,等号右边Angle 为上一时刻的角度,Gyro 为陀螺仪测的角速度的值,dt 是两次滤波之间的时间间隔,我们的运行周期是4ms 或者6ms 。 同时 Q_bias 也是一个变化的量。 但是就预测来说认为现在的漂移跟上一时刻是相同的,即 Q_bias=Q_bias 将上面两个式子写成矩阵的形式 1_01_0 Angle dt Angle dt Q bias Q bia o s Gyr -=+ 得到上式,这个式子对应于卡尔曼滤波的第一个式子 (|1)(1|1)()X k k AX k k Bu k -=--+ ()|1X k k -为2维列向量 _Angle Q bias ,A 为2维方阵101dt -,()|-11X k k -为2维列向量_Angle Q bias ,B 为2维列向量0dt , ()u k 为Gyro (|)(|1) P k k I Kg k H P k k =--(())(5)更新协方差阵
承载能力极限状态 1)根据JTJ250-98《港口工程地基规范》的5.3.2规定,土坡和地基的稳定性验算,其危险滑弧应满足以下承载能力极限状态设计表达式: /Sd Rk R M M γ≤ 式中:Sd M 、Rk M ——分别为作用于危险滑弧面上滑动力矩的设计值和抗滑力矩的标准值; R γ为抗力分项系数。 2)采用简单条分法验算边坡和地基稳定,其抗滑力矩标准值和滑动力矩设计值按下式计算: ()cos tan ()sin Rk ki i ki i ki i ki Sd s ki i ki i M R C L q b W M R q b W α?γα??=+ +?? ??=+?? ∑∑∑ 式中:R ——滑弧半径(m ); s γ——综合分项系数,取1.0; ki W ——永久作用为第i 土条的重力标准值(KN/m ),取均值,零压线以 下用浮重度计算; ki q ——第i 土条顶面作用的可变作用的标准值(kPa ); i b ——第 i 土条宽度(m ); i α——第i 土条滑弧中点切线与水平线的夹角(°); ki ?、ki C ——分别为第i 土条滑动面上的内摩擦角(°)和粘聚力(kPa ) 标准值,取均值; i L ——第 i 土条对应弧长(m )。 3)地基稳定性计算步骤 (1) 确定可能的滑弧圆心范围。通过边坡的中点作垂直线和法线,以坡面中点为圆心,分别以1/4坡长和5/4坡长为半径画同心圆,最危险滑弧圆心即在该4条线所包含的范围内。
(2) 作滑动滑弧。选定某些滑动圆心,作圆与软弱层相切,则与防波堤及土层相交的圆弧即为滑弧。 (3) 进行条分。对滑弧内的土层等进行条分,选择土条的宽度,并且对土条进行编号。 (4) 计算各个土条的自重力。利用公式ki i i i W h b γ=计算各个土条的自重力。 (5) 计算滑弧中点切线与水平线的夹角。作滑弧的中点切线,读出它与水平线之间的夹角,注意滑弧滑动的方向,确定夹角的正负。 (6) 确定土条内滑弧的内摩擦角与粘聚力。对于不同的土层,内摩擦角与粘聚力取均值。 (7) 计算危险弧面上的滑动力矩与抗滑力矩。利用公式计算抗滑力 矩 和 滑 动 力 矩。 抗滑力矩为 ( )c o R k k i i k i i k i i k i M R C L q b W α???= ++ ?? ∑ ∑;而滑动力矩为()sin Sd s ki i ki i M R q b W γα??=+??∑。 确定是否满足要求。利用承载能力极限状态设计表达式/Sd Rk R M M γ≤判断是否满足稳定性的要求。
卡尔曼滤波的原理以及应用 滤波,实质上就是信号处理与变换的过程。目的是去除或减弱不想要成分,增强所需成分。卡尔曼滤波的这种去除与增强过程是基于状态量的估计值和实际值之间的均方误差最小准则来实现的,基于这种准则,使得状态量的估计值越来越接近实际想要的值。而状态量和信号量之间有转换的关系,所以估计出状态量,等价于估计出信号量。所以不同于维纳滤波等滤波方式,卡尔曼滤波是把状态空间理论引入到对物理系统的数学建模过程中来,用递归方法解决离散数据线性滤波的问题,它不需要知道全部过去的数据,而是用前一个估计值和最近一个观察数据来估计信号的当前值,从而它具有运用计算机计算方便,而且可用于平稳和不平稳的随机过程(信号),非时变和时变的系统的优越性。 卡尔曼滤波属于一种软件滤波方法,概括来说其基本思想是:以最小均方误差为最佳估计准则,采用信号与噪声的状态空间模型,利用前一时刻的估计值和当前时刻的观测值来更新对状态变量的估计,求出当前时刻的估计值,算法根据建立的系统方程和观测方程对需要处理的信号做出满足最小均方误差的估计。其所得到的解是以估计值的形式给出的。 卡尔曼滤波过程简单来说主要包括两个步骤:状态变量的预估以及状态变量的校正。预估过程是不考虑过程噪声和量测噪声,只是基于系统本身性质并依靠前一时刻的估计值以及系统控制输入的一种估计;校正过程是用量测值与预估量测值之间的误差乘以一个与过程
噪声和量测噪声相关的增益因子来对预估值进行校正的,其中增益因子的确定与状态量的均方误差有关,用到了使均方误差最小的准则。而这一过程中体现出来的递归思想即是:对于当前时刻的状态量估计值以及均方误差预估值实时进行更新,以便用于下一时刻的估计,使得系统在停止运行之前能够源源不断地进行下去。 下面对于其数学建模过程进行详细说明。 1.状态量的预估 (1)由前一时刻的估计值和送给系统的可控制输入来预估计当前时刻状态量。 X(k|k-1)=A X(k-1|k-1)+B U(k) 其中,X(k-1|k-1)表示前一时刻的估计值,U(k)表示系统的控制输入,X(k|k-1)表示由前一时刻估计出来的状态量的预估计值,A表示由k-1时刻过渡到k时刻的状态转移矩阵,B表示控制输入量与状态量之间的一种转换因子,这两个都是由系统性质来决定的。 (2)由前一时刻的均方误差阵来预估计当前时刻的均方误差阵。 P(k|k-1)=A P(k-1|k-1)A’+Q 其中,P(k-1|k-1)是前一时刻的均方误差估计值,A’代表矩阵A 的转置,Q代表过程噪声的均方误差矩阵。该表达式具体推导过程如下: P(k|k-1)=E{[Xs(k|k)-X(k|k-1)][Xs(k|k)-X(k|k-1)]’}------ 其中Xs(k|k)=A Xs(k-1|k-1)+B U(k)+W(k-1)表示当前时刻的实际值,Xs(k-1|k-1)表示前一时刻的实际值,可以看出与当前时刻的预估计值
研究二级渔港工程设计方案 一、结构优化设计1.设计参数确定根据《防波堤设计与施工规范》298-98有关规定进行计算。 对设置胸墙的斜坡堤,胸墙的顶高程宜定在设计高水位以上10~125倍设计波高值处。 防波堤胸墙顶高程=设计高水位+10~125×13=303+512~640=815~943。 当堤顶不兼作通道时,胸墙的定高程可适当降低,取防波堤堤顶高程为670,防波堤胸墙顶高程为820。 根据构造、工艺及使用要求确定防波堤堤顶宽度为70。 码头面高程其基标准为码头面高程=设计高水位+10~15=403~453。 复核标准为码头面高程=极端高水位+0~05=485~535。 综合使用要求,取码头面高程为410。 码头前沿设计水深,其中计代表船型满载吃水,设计代表船型取270,为富裕水深。 根据底质确定,土质取03,石质取05。 港池底标高=设计低水位-546。 因此,港池前沿水深不满足要求,需要进行港池开挖或者候潮进港作业。 码头长度确定300级码头设计船型取270,泊位长度取39。 2.防波堤结构设计防波堤包括修复与扩建两部分,新建部分基本采用与原老堤相同的结构型式,采用实心斜坡堤。 外海侧坡比采用12,内坡比采用115,外侧采用扭王块护面块体。 采用塑料排水板对新建80防波堤的基础进行处理。 对老堤加高到与新堤堤身断面大小一致,外海侧也采用扭王块进行保护。 单个护面块体的重量根据298-98中公式424-1确定,计算得单个块体的稳定重量为390,采用40。 查298-98附录,取护面层厚度为18。 对端头20进行处理,取护面块体重量50。 3.码头结构设计码头平台的横向排架按弹性支座连续梁五弯矩方程计算,纵梁采用刚性支承的连续梁计算,面板按叠合板计算。 桩基采用600×600的混凝土预制桩,排架间距为6,两端各悬挑15,平台
1.码头分类: 按平面布置分类:顺岸式突堤式墩式 按断面形式分类:直立式斜坡式半直立式半斜坡式多级式 按结构形式分类:重力式码头板桩码头高桩码头混合式码头 2.作用的分类: 时间的变异:永久作用可变作用偶然作用 空间位置的变化:固定作用自由作用 结构的反应:静态作用动态作用 3.船舶荷载: 船舶的系缆力船舶挤靠力船舶撞击力 5.方块码头的断面形式:1阶梯型断面和底宽较大,方块数量,种类和层数较多,横断面方向的整体性差,基底应力不均匀。2 恒重式3 卸荷板式由于卸荷板的遮掩作用,减小了作用在墙背后的土压力,基底应力比较均匀,断面和底宽大大减少,使结构工程量节省,也是横断面处有可能每层只采用一块方块,结构的整体稳定性也较好。 6.抛石基床是重力式码头广泛应用的一种基础形式,抛石基床设计包括:选择基床形式;确定基床厚度和肩宽;确定基槽的底宽和边坡坡度;规定块石的重量和质量要求;确定基床顶面的预留坡度和预留沉降量等 7.岸壁式码头的墙后回填方式:1.紧靠墙背用颗粒较粗和内摩擦角较大的材料做抛石棱体,以减少墙后土压力,并在棱体顶面和坡面设置倒滤层。另一种情况是墙后直接回填细粒土,只在墙身构件间的拼
缝处设置倒滤层,防防止土料流失。 8.重力式码头的变形缝必须延长度方向设置沉降缝和伸缩缝,一般是一缝俩用,统称变形缝。缝宽20-50mm,做成上下通缝,急胸墙与墙身的变形缝在一个垂面上。现场浇注混凝土与浆砌石部位的变形缝用弹性材料填充.变形缝间距根据气温情况,结构形式,地基条件和基床厚度确定,一般10-30m。设在以下位置1.新旧建筑物衔接处2.码头水深或结构形式改变处3.地基土质差别较大处4.基床厚度突变出5.沉箱或方块接缝处 9.重力式码头地面堆货荷载的布置形式及相应的验算项目 码头地面使用荷载为活荷载,应根据不同的计算项目,按最不利情况进行布置。堆货荷载一般有以下3种布置形式:1作用在码头上的垂直力和水平力(以土压力为主)都最大,用于验算基床和地基的承载力及计算建筑物的沉降和验算整体滑动稳定性;2作用在码头上的水平力最大垂直力最小,用于验算建筑物的滑动和倾覆稳定性,3作用在码头上的垂直力最大水平力最小,用于验算基底面后踵的应力。10重力式码头沿基床顶面的抗滑稳定性验算 11重力式码头增强结构耐久性的措施 1根据结构计算和《港口工程混凝土结构设计规范》规定的耐久性要求选定混凝土强度等级。2适当增大钢筋混凝土构件厚度和钢筋的混凝土保护层,保护层厚度不得低于规范所列的规定。3对于受冰冻作用的码头,水位变动区地临水面还可以考虑采用钢筋混凝土板镶面、花岗岩镶面或抗蚀性强、抗磨性高、抗冻性好的新材料。4对于构成
第一章 海岸线(coastline ):海洋与陆地的交界线称为海岸线。 海岸带定义:海洋与陆地相接的地带,是自然界水圈、岩石圈、大气圈和生物圈四个圈层相 互作用最频繁、最活跃之处,具有独特的兼有海、陆两种不同属性的环境特征 组成:潮上带、潮间带和潮下带 海岸:由后滨、前滨、外滨组成。 海岸类型:基岩海岸,砂砾质海岸,泥沙质海岸,生物海岸。 我国海岸带的环境特征: 1、灾害性天气频繁 2、大陆与海洋作用强烈 3、人类活动影响显著 海岸线冲淤变化的影响因素:1.长期因素:海平面上升影响或地面沉降引起岸线蚀退。 2.短期因素:波浪、沿岸流、潮流、人类活动等 我国海岸防护和围海工程现状:海岸防护:保护海岸线免遭波浪,水流的侵蚀和防止风暴潮 对滨海地区的袭击。工程包括:海堤、护岸和保滩促淤等工程 第二章 海岸动力要素:波浪,潮汐。 设计波浪:在确定波浪对各种不同类型海岸工程建筑物的作用力时,定义的一个合理的代表 意义的波浪要素。设计波浪的波浪要素中最重要的是波高。 有效波或1/3大波:波群或全部观测记录中,按波高大小顺序,就相当于总数的1/10的大 波及对应其波高的周期,进行平均得到的波浪,称为有效波,并以H1/3 或Hs 和T1/3或Ts 表示。 潮汐定义:海水在天体引潮力的作用下所产生的周期性运动。习惯上将海水铅直向涨落称潮 汐,而海水在平方向的流动称潮流。 设计潮位(水位):设计潮位是指港口水工建筑物在正常使用条件下的潮位(水位)。 设计高水位应采用高潮累积频率10%的潮位,简称高潮10%;设计低水位应采用低潮累积 率90%的潮位,简称低潮90%。 极端潮位的标准 我国《海港水文规范》中规定,采用年频率统计的方法推求50年一遇的高、低潮位作 为极端水位。 海堤:在河口、海岸地区,为了防止大潮的高潮和风暴潮的泛滥及其伴随风浪的侵袭造成土 地淹没,在沿岸原有地面上修筑的一种专门用来挡水的建筑物。 海堤规划和布置原则:1、统一规划、综合利用。2、注意生态环境3、多方案比选4、堤轴 线避免过多曲折5、海堤设计标准按实际用途和当地地质情况合理确定 海堤设计需要解决的三个问题:1水文动力要素的确定。2结构的确定。3地基的处理 1)海堤设计标准2)设计潮位的确定3)设计波要素的确定 重现期(T ):大于或等于某一潮位的潮水在较长时期内重复出现的平均时间间隔,常以多 少年一遇表达。 频率(P ):大于或等于某一潮位出现的频率。 二者的关系:T=1/P 海堤断面型式:按海堤临水面外形特点来区分,海堤可以分为斜坡式,陡墙式,混合式海堤。 断面形式选择:地质条件较差、堤身相对较高的堤段,海堤断面宜选择斜坡式; 1/313%H H ≈1/104%H H ≈
基于正定二次型的 李雅普诺夫稳定性分析 张俊超 (控制科学与工程、控制理论与控制工程、2010010215) 摘要:李雅普诺夫稳定性理论以状态向量描述为基础,不仅适用于单变量、 线性、定常系统,而且适用于多变量、非线性、时变系统。但要应用李氏判据判断系统稳定性,就要涉及到系统矩阵A特征值的求解以及根据系统状态方程构造正定二次型的李雅普诺夫函数来判断系统稳定性。 1.问题的提出 我们在处理实际工程问题时,经常需要判断系统稳定性,一般稳定性判据都有一定局限性,李雅普诺夫稳定性理论是确定系统稳定性的一般的理论,不仅适用于单变量、线性、定常系统,而且适用于多变量、非线性、时变系统,它以状态向量描述为基础,结合正定二次型的相关知识对系统稳定性进行判断。 2.问题的求解 李雅普诺夫稳定性理论分析系统稳定性的两种方法: (1)利用线性系统微分方程的解来判断系统的稳定性 ——李雅普诺夫第一法(间接法) 李雅普诺夫第一法的主要内容 1)用一次近似式表示状态方程,即:X=AX+B(x) 如果A的全部特征值都具有负实部,则系统在平衡点xe=0处是稳定的, 且系统的稳定性与高阶项B(x)无关。 2)如果X=AX+B(x)的A的特征值中至少有一个具有正实部,则无论B(x)如何,系统在平衡点xe=0处为不稳定的。 3)如果X=AX+B(x)的A的含有等于零的特征值,则系统的稳定性由B(x)决定。李雅普诺夫第一法是根据系统矩阵A的特征值来判断系统的稳定性的。 (2)构造李雅普诺夫函数,利用构造的李氏函数判断系统稳定性 ——李雅普诺夫第二法(直接法) 观察振动现象,若系统能量(含动能和位能)随时间推移而衰减,则系统迟早会达到平衡状态。基本思想:若系统内部能量随时间↑而↓,最终到达静止状态,系统稳定。虚构一个能量函数(李雅普诺夫函数) V(x,t)=f(x 1,x 2 , (x) n ,t) V(x)=f(x 1,x 2 , (x) n ) V(x,t)或V(x)是一个标量函数。能量总大于零,故为正定函数。能量随随时间增加而衰减,即:V(x,t)或V(x)的导数小于零。
《海岸工程学》课程设计计算说明书 学院:海洋科学与工程学院 专业:港口航道与海岸工程 班级: 姓名: 学号: 指导教师: 完成日期: 2014年06月30日
目录 摘要 (2) 第一章设计资料分析 (4) 1、工程概况 (4) 1.1工程位置 (4) 1.2工程内容 (4) 2、自然条件 (4) 2.1气象 (4) 2.2水文 (5) 2.3工程地质 (6) 3、设计荷载 (8) 3.1 恒载:结构自重。 (8) 3.2 施工期荷载:施工机械荷载,按1t/m2计。 (8) 3.3 水流力 (8) 3.4 波浪力 (8) 3.5 地震荷载 (8) 第二章防波堤总体设计 (9) 1.结构选型 (9) 2.防波堤断面设计 (9) 2.1斜坡堤断面型式的确定 (9) 2.2胸墙顶高程 (9) 2.3护面坡顶高程 (10) 2.4堤顶宽度 (11) 2.5支承棱体 (11) 2.6肩台高程和宽度 (11) 第三章构造设计 (11) 1.堤心石 (11) 2.护面块体 (11) 3.外坡护面块体下的垫层 (12) 4.堤底垫层及堤前护底块石 (12) 第四章斜坡式防波堤的计算 (12) 1.护面块体的稳定重量、护面层厚度 (12) 2.垫层块石的重量和厚度 (13) 3.堤前护底块石的稳定重量和厚度 (13) 4.胸墙的作用标准值计算和相应组合 (14) 4.1持久组合 (14) 4.2短暂组合 (17) 5.胸墙的抗滑、抗倾稳定性验算 (18) 5.1沿墙底抗滑稳定性验算 (18) 5.2沿墙底抗倾稳定性验算 (19) 结束语 (19)
摘要 拟建电厂位于印度尼西亚国南部爪哇岛的西南海岸Palabuhan Ratu 湾内,面对印度洋。地理概位为:07°02′S,106°32′ E。工程内容包括南防波堤和北防波堤,南防波堤总长1284.628m,北防波堤总长778.627m。根据《海港水文规范》(JTJ213-98),《防波堤设计与施工规范》JTJ298-98设计要求,目的是掌握防波堤设计的基本流程,能对水文要素进行正确分析,工程进行构造设计和结构验算和对地基处理以满足设计要求。 Abstract The proposed power plant is located south of the Indonesian island of Java, the country's southwest coast Palabuhan Ratu Bay, facing the Indian Ocean. There is the geographical position: 07 ° 02'S, 106 ° 32 'E. The works include the South and North Breakwater Breakwater South breakwater length of 1284.628m, North breakwater length of 778.627m. According to "harbor hydrological norms" (JTJ213-98), "breakwater design and construction specifications" JTJ298-98 design requirements, the purpose is to master the basic process breakwater design, can be properly analyzed hydrological elements, structural design and construction works and checking for ground treatment to meet the design requirements.
卡尔曼,美国数学家和电气工程师。1930年5月19日生于匈牙利首都布达佩斯。1953年在美国麻省理工学院毕业获理学士学位,1954年获理学硕士学位,1957年在哥伦比亚大学获科学博士学位。1957~1958年在国际商业机器公司(IBM)研究大系统计算机控制的数学问题。1958~1964年在巴尔的摩高级研究院研究控制和数学问题。1964~1971年到斯坦福大学任教授。1971年任佛罗里达大学数学系统理论研究中心主任,并兼任苏黎世的瑞士联邦高等工业学校教授。1960年卡尔曼因提出著名的卡尔曼滤波器而闻名于世。卡尔曼滤波器在随机序列估计、空间技术、工程系统辨识和经济系统建模等方面有许多重要应用。1960年卡尔曼还提出能控性的概念。能控性是控制系统的研究和实现的基本概念,在最优控制理论、稳定性理论和网络理论中起着重要作用。卡尔曼还利用对偶原理导出能观测性概念,并在数学上证明了卡尔曼滤波理论与最优控制理论对偶。为此获电气与电子工程师学会(IEEE)的最高奖──荣誉奖章。卡尔曼著有《数学系统概论》(1968)等书。 什么是卡尔曼滤波 最佳线性滤波理论起源于40年代美国科学家Wiener和前苏联科学家Kолмогоров等人的研究工作,后人统称为维纳滤波理论。从理论上说,维纳滤波的最大缺点是必须用到无限过去的数据,不适用于实时处理。为了克服这一缺点,60年代Kalman把状态空间模型引入滤波理论,并导出了一套递推估计算法,后人称之为卡尔曼滤波 精彩文档
理论。卡尔曼滤波是以最小均方误差为估计的最佳准则,来寻求一套递推估计的算法,其基本思想是:采用信号与噪声的状态空间模型,利用前一时刻地估计值和现时刻的观测值来更新对状态变量的估计,求出现时刻的估计值。它适合于实时处理和计算机运算。 卡尔曼滤波的实质是由量测值重构系统的状态向量。它以“预测—实测—修正”的顺序递推,根据系统的量测值来消除随机干扰,再现系统的状态,或根据系统的量测值从被污染的系统中恢复系统的本来面目。 释文:卡尔曼滤波器是一种由卡尔曼(Kalman)提出的用于时变线性系统的递归滤波器。这个系统可用包含正交状态变量的微分方程模型来描述,这种滤波器是将过去的测量估计误差合并到新的测量误差中来估计将来的误差。 卡尔曼滤波的应用 斯坦利.施密特(Stanley Schmidt)首次实现了卡尔曼滤波器.卡尔曼在NASA埃姆斯研究中心访问时,发现他的方法对于解决阿波罗计划的轨道预测很有用,后来阿波罗飞船的导航电脑使用了这种滤波器. 关于这种滤波器的论文由Swerling (1958), Kalman (1960)与Kalman and Bucy (1961)发表. 精彩文档