
7.3控制系统根轨迹分析MATLAB 仿真实训
7.3.1实训目的
1. 掌握运用MATLAB 绘制180度、0度根轨迹图的编程方法;
2. 学会通过根轨迹图获取相关信息的方法;
3. 利用仿真结果对系统根轨迹进行分析;
4. 学会通过根轨迹图分析和解决一些实际问题。 7.3.2实训内容
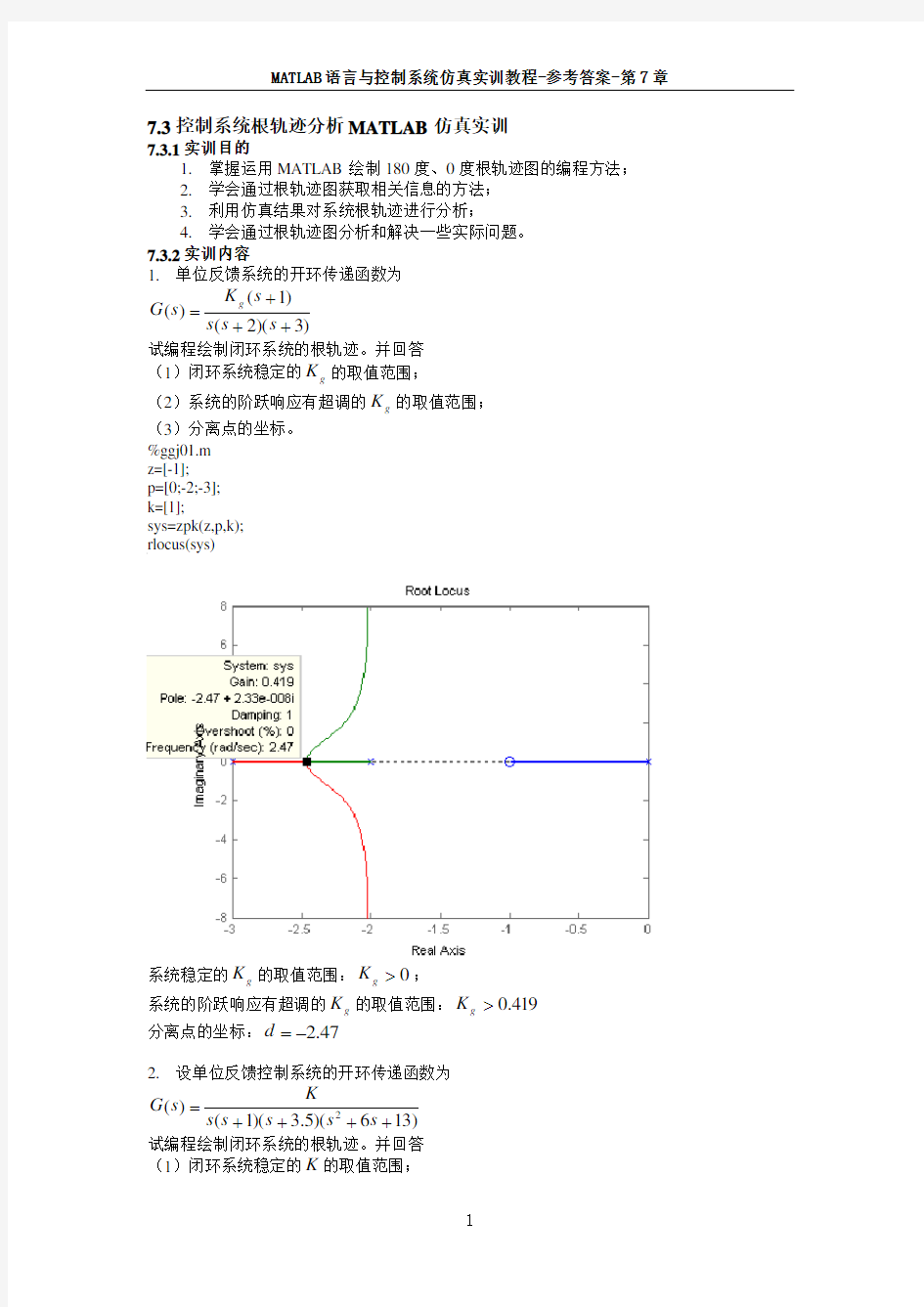
1. 单位反馈系统的开环传递函数为
)
3)(2()1()(+++=
s s s s K s G g
试编程绘制闭环系统的根轨迹。并回答 (1)闭环系统稳定的g K 的取值范围; (2)系统的阶跃响应有超调的g K 的取值范围; (3)分离点的坐标。 %ggj01.m z=[-1]; p=[0;-2;-3]; k=[1];
sys=zpk(z,p,k); rlocus(sys)
系统稳定的g K 的取值范围:0>g K ;
系统的阶跃响应有超调的g K 的取值范围:419.0>g K 分离点的坐标:47.2-=d
2. 设单位反馈控制系统的开环传递函数为
)
136)(5.3)(1()(2
++++=
s s s s s K
s G 试编程绘制闭环系统的根轨迹。并回答 (1)闭环系统稳定的K 的取值范围;
(2)根轨迹与虚轴的交点坐标; (3)分离点的坐标。 ggj02.m
%根轨迹仿真实训第2题 n=1;
d=conv([1,0],conv([1,1],conv([1,3.5],[1,6,13]))); rlocus(n,d)
由图上数据可知:
闭环系统稳定的K 的取值范围:9.700< 3. 设单位反馈控制系统的开环传递函数为 ) 204)(4()(2+++= s s s s K s G 试编程绘制闭环系统的根轨迹。并回答 (1)闭环系统稳定的K 的取值范围; (2)根轨迹与虚轴的交点坐标; (3)各个分离点的坐标。 %根轨迹仿真实训第3题 n=1; d=conv([1,0],conv([1,4],[1,4,20])); rlocus(n,d) 由图上数据可知: 闭环系统稳定的K 的取值范围:2620< 4. 设单位反馈控制系统的开环传递函数为 ) 2() 1()(+-= s s s K s G K 的变化范围为∞→0,试编程绘制闭环系统的根轨迹。并回答 (1)闭环系统稳定的K 的取值范围; (2)根轨迹与虚轴的交点坐标; (3)系统的单位阶跃响应无超调的K 的取值范围。 解:系统的根轨迹方程 1) 2() 1(-=+-s s s K %根轨迹仿真实训第4题 n=[-1,1]; d=conv([1,0],[1,2]); rlocus(n,d) 闭环系统稳定的K 的取值范围:1990< 系统的单位阶跃响应无超调的K 的取值范围:536.00< 5. 设反馈控制系统中 ) 5)(2()(2++= s s s K s G , 1)(=s H (1)编程绘制闭环系统的根轨迹,并判断闭环系统的稳定性; (2)如果改变反馈通路传递函数使s s H 21)(+=,试判断)(s H 改变后系统的稳定性,并说明)(s H 改变所产生的效应; 解:(1)根轨迹方程为1) 5)(2(,1)()(2 -=++-=s s s K s H s G 即 根轨迹绘制的仿真程序如下: n=1; d=conv([1,0,0],conv([1,2],[1,5])); sys=tf(n,d); rlocus(sys) 由图知闭环系统不稳定; (2)根轨迹方程为1) 5)(2(12,1)()(2-=+++-=s s s s K s H s G ) (即 n=[2,1]; d=conv([1,0,0],conv([1,2],[1,5])); sys=tf(n,d); rlocus(sys) 由图知闭环系统在一定范围内(7.220< 6. 实系数多项式函数 a s a s s s A ++++=)6(5)(23 欲使0)(=s A 的根皆为实数,试确定参数a 的范围并进行验证。 解:由0)6(5)(2 3=++++=a s a s s s A 整理可得 165123-=+++s s s s a ) ( 绘制根轨迹: n=[1,1]; d=[1,5,6,0]; sys=tf(n,d); rlocus(n,d); 由图可知,当]419.0,0[∈a 时方程0)6(5)(2 3=++++=a s a s s s A 的根均为实数根; 验证:当3.0=a 时,方程03.03.65)6(5)(2 3 2 3 =+++=++++=s s s a s a s s s A 的根应该均为实数根,具体通过解方程验证如下: >> d=[1,5,6.3,0.3]; >> roots(d) ans = -2.7436 -2.2068 -0.0495 当5.0=a 时,方程为05.05.65)6(5)(2 323=+++=++++=s s s a s a s s s A ,从根轨迹图上看存在2个复数根。具体通过解方程验证如下: >> d2=[1,5,6.5,0.5]; >> roots(d2) ans = -2.4590 + 0.2236i -2.4590 - 0.2236i -0.0820 7. 已知反馈控制系统的开环传递函数为 ) 52)(22()()(22++++= s s s s K s H s G , 0>K 但反馈极性未知,欲保证闭环系统稳定,试确定根轨迹增益K 的范围; 解:假设为负反馈,则根轨迹方程为1) 52)(22(1 2 2-=++++s s s s K n=1; d=conv([1,2,2],[1,2,5]); sys=tf(n,d); rlocus(sys) 稳定性:)4.16,0[∈K 时闭环系统稳定; 假设为正反馈,则根轨迹方程为1) 52)(22(1 22=++++s s s s K ,整理可得: 1) 52)(22(1 22-=++++-s s s s K ,仿真程序如下: n=-1; d=conv([1,2,2],[1,2,5]); sys=tf(n,d); rlocus(sys) 稳定性:)10,0[∈K 时闭环系统稳定; 欲保证闭环系统稳定,不管系统为正反馈或负反馈,当)10,0[∈K 时闭环系统必然是稳定的。 8. 设反馈控制系统中 2 22)42)(22()(++++= s s s s K s G , 1)(=s H (1)编程绘制闭环系统的根轨迹,并分析闭环系统的稳定性。 (2)确定分离点的坐标。 解:根轨迹方程为1) 42)(22(1 2 22-=++++s s s s K sys1=tf([1],[1,2,2]); %2 21 sys12++=s s sys2=tf([1],[1,2,4]); %4 21 2sys 2++=s s sys3=tf([1],[1,2,4]); %4 21 sys32++=s s sys=sys1*sys2*sys3 % 2 22) 42)(22(1 ++++=s s s s sys rlocus(sys) 稳定性:)3.31,0[∈K 时闭环系统稳定; 分离点坐标:29.1j 12 ,1±-=d 9. 绘制以下系统根轨迹(注意180度根轨迹和0度根轨迹的区分) (1)1) 2(1 * -=+s s K n=1; d=conv([1,0],[1,2]); sys=tf(n,d); rlocus(sys); (2)1) 4)(3)(1(1 * =-++s s s K 整理为:1) 4)(3)(1(1 * -=-++-s s s K n=-1; d=conv([1,1],conv([1,3],[1,-4])); sys=tf(n,d); rlocus(sys); (3)1) 4)(2)(1(1 * -=+++s s s s K n=1; d=conv([1,0],conv([1,1],conv([1,2],[1,4]))); sys=tf(n,d); rlocus(sys); (4)1) 5)(6)(3() 4)(1(* 2 =+-+++s s s s s s K 整理为:1) 5)(6)(3() 4)(1(*1* 2-=+-+++-s s s s s s K n=-1*conv([1,1],[1,4]); d=conv([1,0,0],conv([1,3],conv([1,-6],[1,5]))); sys=tf(n,d); rlocus(sys); (5)1)5)(3() 8)(1(* 2 2-=++++s s s s s K z=[-1;-8]; p=[0;0;-3;-5;-5]; k=[1]; sys=zpk(z,p,k); rlocus(sys); (6)1) 5)(3() 8)(1(* 3 2 =++++s s s s s K 整理为:1) 5)(3()8)(1(*1*3 2 -=++++-s s s s s K z=[-1;-8;-8]; p=[0;0;0;-3;-5]; k=[-1]; sys=zpk(z,p,k); rlocus(sys); (7)1) 4)(3)(2()1(* 2 -=++++s s s s s K z=[-1;-1]; p=[0;-2;-3;-4]; k=[1]; sys=zpk(z,p,k); rlocus(sys); (8)1) 2)(1()22() 3(* 2 2=+++++s s s s s K 整理为:1) 2)(1()22() 3(*1*22 -=+++++-s s s s s K sys1=tf([-1],[1,2,2]); %2 21 sys12++-=s s sys2=tf([1,3],[1,2,2]); %2 23 2sys 2+++=s s s sys3=tf([1],conv([1,1],[1,2])); %) 2)(1(1 3sys ++=s s sys=sys1*sys2*sys3 % ) 2)(1()22() 3(*122+++++-=s s s s s sys rlocus(sys) 10. 在空间站,为有利于产生能量和进行通讯,必须保持空间站对太阳和地球的合适指向。 空间站的方位控制系统可由带有执行机构和控制器的单位负反馈控制系统来表征,其开环传递函数为 ) 14424() 20()(2+++=*s s s s K s G 试画出* K 值增大时的系统根轨迹图,并求出使系统产生振荡的* K 的取值范围,并通过系统的单位阶跃响应进行验证。 解:仿真程序如下 n=[1,20]; d=conv([1,0],[1,24,144]); sys=tf(n,d); rlocus(sys); 使系统产生振荡的*K 的取值范围:4.16*>K ;取28*=K 做系统的单位阶跃响应,仿真程序如下: no=conv([28],[1,20]); do=conv([1,0],[1,24,144]); [nc,dc]=cloop(no,do) sysc=tf(nc,dc); step(sysc); 由阶跃响应曲线可以看出为震荡形式;
相关主题
文本预览