S120 简单抱闸控制
S120 Simple Brake Control
Single FAQ Edition (2012年4月)
摘要本文介绍了S120 的简单抱闸控制功能。
关键词 S120,简单抱闸控制
Key Words S120, Simple Brake Control
目录
1 简单抱闸控制特点
2 抱闸功能描述
3 抱闸调试过程
4 重要参数
1 简单抱闸控制特点
S120抱闸控制主要分为简单抱闸控制和扩展抱闸控制,可根据应用场合不同而灵活选用。本文主要介绍简单抱闸控制。
S120 简单抱闸控制的特点主要有:
?·通过顺序控制自动激活
?·静态P1227(零速P1228)检测监控
?·强制释放抱闸(p0855,p1215),包括有条件或无条件释放抱闸
?·无条件关闭抱闸(p0858 = 1)
?·取消“使能速度控制器”信号后的抱闸应用(p0856 = 0)
2抱闸功能描述
“简单抱闸控制”专门用于电机抱闸的控制。当驱动不激活时,保持抱闸用于保护驱动装置,以免出现不希望的运动,如位能性的负载或垂直运行的负载出现的危险。
释放和保持抱闸的触发命令通过控制单元(CU)的DRIVE-CLiQ 传送至电机模块,直接把信号互连到电机模块上并进行监控。然后电机模块执行动作并激活保持抱闸的输出。可在
SINAMICS S120/S150 参数手册(功能图2701,2704)中看到详细的顺序控制框图。通过
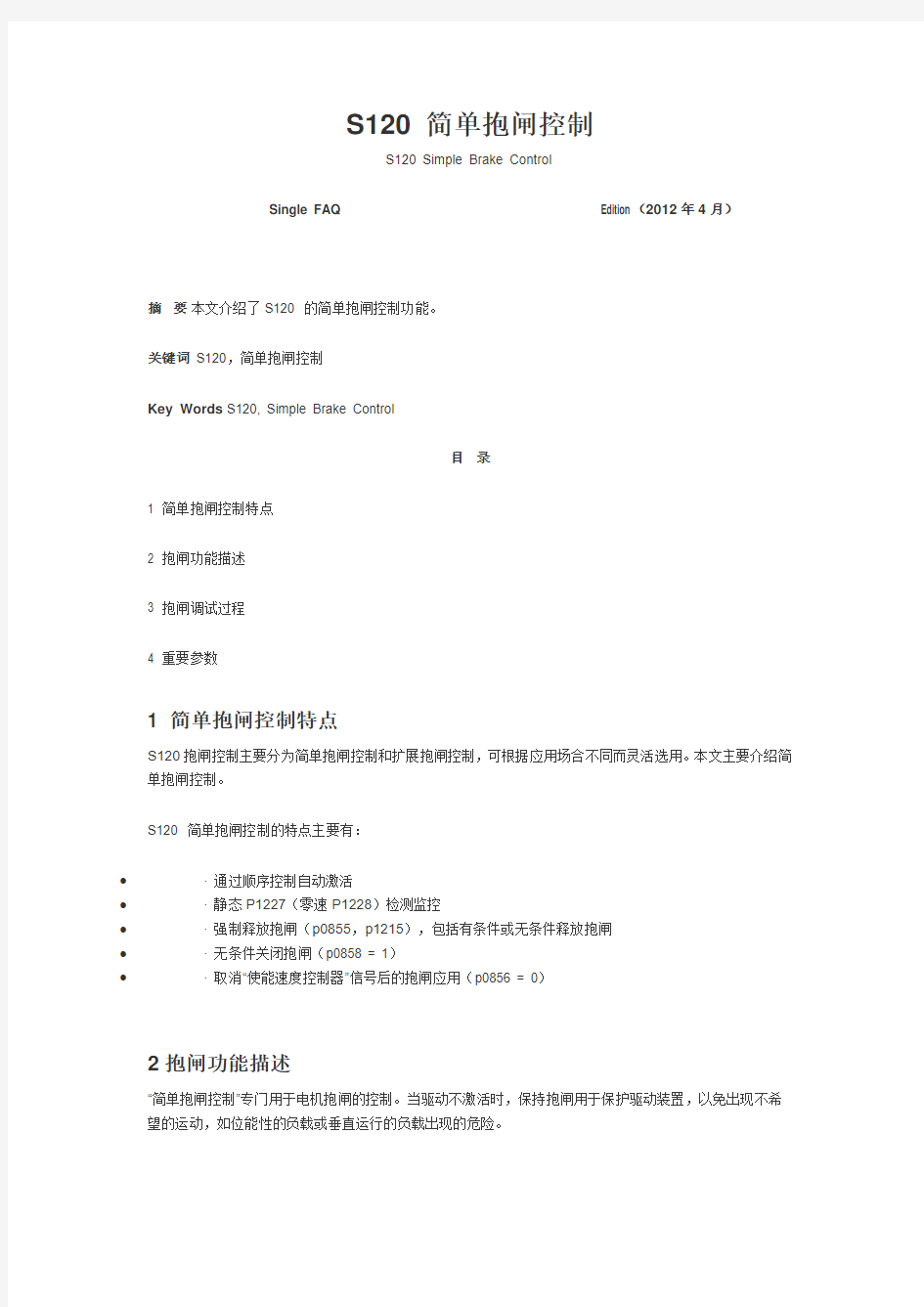
参数p1215可配置抱闸控制的运行规则,图1所示为简单抱闸控制的顺序图。
打开抱闸的过程:
⑴当符合启动条件后,控制单元发出ON命令,接触器开始闭合,设备开始预充电。完
成后,开始建立励磁;
⑵励磁完成后,打开抱闸的输出信号为1;
⑶此处还可以通过p0855=1强迫释放抱闸命令;
⑷打开抱闸的输出信号为1,r0899.12=1,可以控制抱闸装置。此时电机并不会立即加
速,否则会出现溜钩的现象;
⑸延迟时间p1216到达之后,电机立即加速,直到稳定状态。p1216的时间需根据现
场情况调节。
关闭抱闸的过程:
⑴当控制单元发出OFF命令后,电机速度开始下降;
⑵电机实际速度或设定速度小于p1226所设定的值;
⑶延迟p1227或p1228时间后,关闭抱闸的输出信号为1;
⑷此处还可以通过p0858 = 1强迫输出关闭抱闸命令;
⑸关闭抱闸的输出信号为1,r0899.13=1,可以控制抱闸装置。此时变频器输出电流仍
存在,否则会出现溜钩的现象;
⑹延迟时间p1217到达之后,变频器脉冲封锁,输出电流立即降到0。p1217的时间
需根据现场情况调节。
图1 简单抱闸控制的顺序图
3 抱闸调试过程
如果电机模块具有内部集成的抱闸控制并连接有抱闸装置时,可通过设置参数p1215 = 1激活简单抱闸控制。
如果电机模块没有内部集成的抱闸控制,可通过设置参数p1215 = 3激活抱闸控制,此时需要将“开闸”或/和“关闸”信号互联到CU的输出点上,由此输出点来控制开抱闸。
注意:
?·简单抱闸控制不能应用于维护性的抱闸控制,当应用抱闸控制时一定要考虑特殊的工艺要求和机械条件以保证人员的安全。
?·当电机有抱闸装置时,设置P1215=0,在启动设备时将导致抱闸装置的损坏。
?·只有书本型功率单元和模块型功率单元有安全抱闸继电器时,才能激活抱闸控制监测(p1278 = 0)。
抱闸配置:
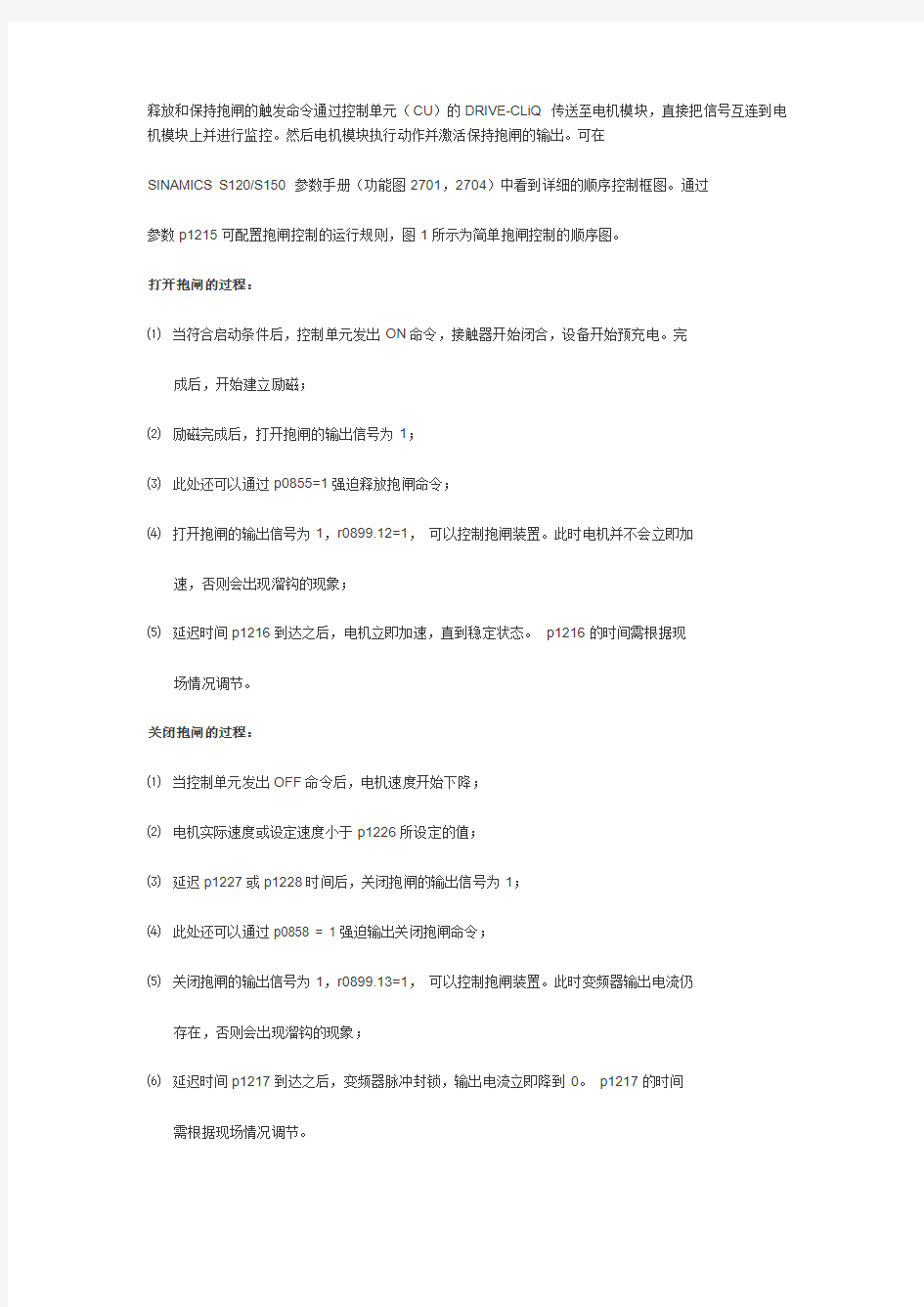
在STARTER或SCOUT调试软件中,添加一个驱动,然后配置驱动参数。在图2所示抱闸配置界面中,根据实际情况选择1或者3。
图2 选择基本抱闸
在驱动的目录树下选择“Functions”à“Brake control”,打开抱闸设置界面,如图3所示。
图3 基本抱闸配置
参数设置:
对于参数p1215,可以有以下几种设置方式:
?· p1215=0,不使用报闸功能
?· p1215=1,基本报闸控制模块集成的抱闸
?· p1215=2,电机报闸一直打开
?· p1215=3,外部报闸控制装置
p1216为释放抱闸时间,p1217为关闭抱闸时间。一般地,关闭抱闸命令和释放抱闸命令连接一个BICO 参数即可,通常连接r0899.12。
关闭抱闸配置:
如图4所示,点击“Close brake”按钮,进入关闭抱闸设置界面。可以设置零速检测阈值(p1266),零速检测监控时间(p1227)和脉冲抑制延迟时间(p1228)。
通过参数p0858设置强制关闭抱闸,可连接至一个开关量,如果此信号为1,则强制关闭抱闸。
图4 关闭抱闸设置
释放抱闸配置:
如图5所示,点击“Release brake”按钮,进入释放抱闸设置界面。通过参数p0855设置强制释放抱闸,可连接至一个开关量,如果此信号为1,则强制释放抱闸。
图5 释放抱闸设置
4 重要参数
列出关于抱闸控制的一些重要参数,可以根据不同应用场合进行灵活设置:
?· r0056.4 励磁完成
?· r0060 CO 设定值滤波器前的速度设定值
?· r0063 CO 实际值滤波后的实际速度值(伺服)?· r0063[0…2] CO速度实际值
?· r0108.14 CO 扩展抱闸控制
?· p0855[C] BI 无条件释放抱闸
?· p0856 BI 速度控制器使能
?· p0858 BI 无条件关闭抱闸
?· r0899.12 BO 开抱闸指令
?· r0899.13 BO 关抱闸指令
?· p1215 电机抱闸配置
?· p1216 释放抱闸时间
?· p1217 关闭抱闸时间
?· p1226 零速检测阈值
?· p1227 零速检测监视时间
?· p1228 脉冲抑制延迟时间
?· p1278 抱闸控制诊断评估
如果您对该文档有任何建议,请将您的宝贵建议提交至下载中心留言板。
该文档的文档编号:
驱动技术
西门子(中国)有限公司
工业业务领域客户服务与支持中心
网站首页:https://www.doczj.com/doc/8815577998.html,
驱动技术下载中心:https://www.doczj.com/doc/8815577998.html,/download/DocList.aspx?TypeId=0&CatFirst=85
驱动技术全球技术资源:https://www.doczj.com/doc/8815577998.html,/CN/view/zh/10803928/130000
“找答案”驱动技术版区:https://www.doczj.com/doc/8815577998.html,/service/answer/category.asp?cid=1038
注意事项
应用示例与所示电路、设备及任何可能结果没有必然联系,并不完全相关。应用示例不表示客户的具体解决方案。它们仅对典型应用提供支持。用户负责确保所述产品的正确使用。这些应用示例不能免除用户在确保安全、专业使用、安装、操作和维护设备方面的责任。当使用这些应用示例时,应意识到西门子不对在所述责任条款范围之外的任何损坏/索赔承担责任。我们保留随时修改这些应用示例的权利,恕不另行通知。如果这些应用示例与其它西门子出版物(例如,目录)给出的建议不同,则以其它文档的内容为准。
声明
我们已核对过本手册的内容与所描述的硬件和软件相符。由于差错难以完全避免,我们不能保证完全一致。我们会经常对手册中的数据进行检查,并在后续的版本中进行必要的更正。欢迎您提出宝贵意见。
版权? 西门子(中国)有限公司2001-2011 版权保留
复制、传播或者使用该文件或文件内容必须经过权利人书面明确同意。侵权者将承担权利人的全部损失。权利人保留一切权利,包括复制、发行,以及改编、汇编的权利。
硬件安全措施 持续提高的设备速率和生产流程都离不开集成安全功能的帮助安全集成基本功能 ?安全转矩断开(STO) ?安全刹车控制(SBC) ?安全停车(SS1) 安全扩展功能(需要授权) ?安全停车2(SS2) ?安全操作停止(SOS) ?安全限制速度SLS) ?安全速度监控(SSM) SINAMICS S120:安全集成扩展功能,通过PROFIBUS的PROFIsafe 激活CU320的安全故障驱动,两个驱动器使用的安全工功能不同。.F-CPU负责输入信号与安全相关的逻辑处理。.FCPU作为F 主站和PROFIBUS主站。 本功能实例基于SINAMICS S120培训用例(6ZB2480-0BA00)和SAFETY培训使用
软件参数 1 简单抱闸控制特点 S120抱闸控制主要分为简单抱闸控制和扩展抱闸控制,可根据应用场合不同而灵活选用。本文主要介绍简单抱闸控制。 S120 简单抱闸控制的特点主要有: ?通过顺序控制自动激活 ?静态P1227(零速P1228)检测监控 ?强制释放抱闸(p0855,p1215),包括有条件或无条件释放抱闸 ?无条件关闭抱闸(p0858 = 1) ?取消“使能速度控制器”信号后的抱闸应用(p0856 = 0) 2抱闸功能描述 “简单抱闸控制”专门用于电机抱闸的控制。当驱动不激活时,
保持抱闸用于保护驱动装置,以免出现不希望的运动,如位能性的负载或垂直运行的负载出现的危险。 释放和保持抱闸的触发命令通过控制单元(CU)的DRIVE-CLiQ 传送至电机模块,直接把信号互连到电机模块上并进行监控。然后电机模块执行动作并激活保持抱闸的输出。可在SINAMICS S120/S150 参数手册(功能图2701,2704)中看到详细的顺序控制框图。通过参数p1215可配置抱闸控制的运行规则,图1所示为简单抱闸控制的顺序图。 打开抱闸的过程: (1) 当符合启动条件后,控制单元发出ON命令,接触器开始闭合,设备开始预充电。完 成后,开始建立励磁; (2) 励磁完成后,打开抱闸的输出信号为1; (3) 此处还可以通过p0855=1强迫释放抱闸命令; (4) 打开抱闸的输出信号为1,r0899.12=1,可以控制抱闸装置。此时电机并不会立即加速,否则会出现溜钩的现象; (5) 延迟时间p1216到达之后,电机立即加速,直到稳定状态。p1216的时间需根据现场情况调节。 关闭抱闸的过程: (1) 当控制单元发出OFF命令后,电机速度开始下降; (2) 电机实际速度或设定速度小于p1226所设定的值;
电机抱闸原理是什么?1、电磁抱闸的线圈与电机并联;2、电机有电,电磁抱闸的线圈也就有电;3、电机没电,电磁抱闸的线圈也就没电;三相异步电动机切除电源后依靠惯性还要转动一段时间(或距离)才能停下来,而生产中起重机的吊钩或卷扬机的吊篮要求准确定位;万能铣床的主轴要求能迅速停下来;升降机在突然停电后需要安全保护和准确定位控制…等。这些都需要对拖动的电动机进行制动,所谓制动,就是给电动机一个与转动方向相反的转矩使它迅速停转(或限制其转速)。制动的方法一般有两类:机械制动和电气制动。(一)机械制动利用机械装置使电动机断开电源后迅速停转的方法叫机械制动。常用的方法:电磁抱闸制动。1、电磁抱闸的结构:主要由两部分组成:制动电磁铁和闸瓦制动器。制动电磁铁由铁心、衔铁和线圈三部分组成。闸瓦制动器包括闸轮、闸瓦和弹簧等,闸轮与电动机装在同一根转轴上。2、工作原理:电动机接通电源,同时电磁抱闸线圈也得电,衔铁吸合,克服弹簧的拉力使制动器的闸瓦与闸轮分开,电动机正常运转。断开开关或接触器,电动机失电,同时电磁抱闸线圈也失电,衔铁在弹簧拉力作用下与铁芯分开,并使制动器的闸瓦紧紧抱住闸轮,电动机被制动而停转。3、电磁抱闸制动的特点机械制动主要采用电磁抱闸、电磁离合器制动,两者都是利用电磁线圈通电后产生磁场,使静铁芯产生足够大的吸力吸合衔铁或动铁芯(电磁离合器的动铁芯被吸合,动、静摩擦片分开),克服弹簧的拉力而满足工作现场的要求。电磁抱闸是靠闸瓦的摩擦片制动闸轮.电磁离合器是利用动、静摩擦片之间足够大的摩擦力使电动机断电后立即制动。优点:电磁抱闸制动,制动力强,广泛应用在起重设备上。它安全可靠,不会因突然断电而发生事故。缺点:电磁抱闸体积较大,制动器磨损严重,快速制动时会产生振动。4、电动机抱闸间隙的调整方法①停机。(机械和电气关闭确认、泄压并动力上锁,并悬挂"正在检修"、"严禁启动"警示牌。)②卸下扇叶罩;③取下风扇卡簧,卸下扇叶片;④检查制动器衬的剩余厚度(制动衬的最小厚度);⑤检查防护盘:如果防护盘边缘已经碰到定位销标记时,必须更换制动器盘;⑥调整制动器的空气间隙:将三个(四个)螺栓拧紧到空气间隙为零,再将螺栓反向拧松角度为120°,用塞尺检查制动器的间隙(至少检查三个点),应该均匀且符合规定值;不对请重新调整;(注:抱闸的型号不同,其反向拧松的角度、制动器的间隙也不一样)。⑦手动运行,制动器动作声音清脆、停止位置准确、有效。⑧现场6S标准清扫。(二)电气制动1、能耗制动1)能耗制动的原理:电动机切断交流电源后,转子因惯性仍继续旋转,立即在两相定子绕组中通入直流电,在定子中即产生一个静止磁场。转子中的导条就切割这个静止磁场而产生感应电流,在静止磁场中受到电磁力的作用。这个力产生的力矩与转子惯性旋转方向相反,称为制动转矩,它迫使转子转速下降。当转子转速降至0,转子不再切割磁场,电动机停转,制动结束。此法是利用转子转动的能量切割磁通而产生制动转矩的,实质是将转子的动能消耗在转子回路的电阻上,故称为能耗制动。2)能耗制动的特点:优点:制动力强、制动平稳、无大的冲击;应用能耗制动能使生产机械准确停车,被广泛用于矿井提升和起重机运输等生产机械。缺点:需要直流电源、低速时制动力矩小。电动机功率较大时,制动的直流设备投资大。2、反接制动1)电源反接制动电源反接,旋转磁场反向,转子绕组切割磁场的方向与电动机状态相反,起制动作用,当转速降至接近零时,立即切断电源,避免电动机反转。反接制动的特点:优点是制动力强、停转迅速、无需直流电源;缺点是制动过程冲击大,电能消耗多。2)电阻倒拉反接制动绕线异步电动机提升重物时不改变电源的接线,若不断增加转子电路的电阻,电动机的转子电流下降,电磁转矩减小,转速不断下降,当电阻达到一定值,使转速为0,若再增加电阻,电动机反转。特点:能量损耗大。
Brake Adjustment Procedure 抱闸调整程序 Precaution: All lock-out tag-out procedure must be strictly adhered to. Electrical and mechanical energy must be removed before commencement of adjustment work. 注意:必须严格执行锁闭程序。在抱闸调整工作开始前,确保不存在任何的电能和机械能。Sky-1 brake adjustment procedure Sky-1 抱闸调整程序 1. Preparation 准备工作 a) Put the lift under inspection mode 将电梯转成检修模式 b) Move the car in the up direction and land the counterweight on the prop-up pole 向上开轿厢,使对重落在支撑物上 c) Check the transformer voltage of the brake circuit, ensure the AC voltage is within the limit specify in the wiring diagram 检查制动回路的变压器电压,确保交流电压符合原理图要求 d) Check and confirm that the safety chain circuit are all effective 检查并确认安全回路有效 e) Switch off the main power and apply the lock-out tag-out procedure 切断主电源并执行锁闭程序 f) Activate the controller safety switch and/or the safety switch 按下控制柜的急停开关和/或其他急停开关 g) Remove the machine guard 拆下机器保护罩 h) Clean the machine 清洁主机 i) Check and ensure that the brake arm, and all other moving parts are free of rust. All moving parts must be able to move or rotate freely. If necessary, disassemble the brake, clean thoroughly and apply lubricant. Reassemble the brake with its original settings. 检查并保证抱闸臂和所有其它的运动部件没有生锈,所有能够运动的部分必须能够自由移动和转动,如有必要拆卸抱闸并彻底清洁和润滑。拆卸后按照原来状态重新组装抱闸。 Note: Make sure the brake drum and brake pad are totally free of oil or lubricant
1 简单抱闸控制特点 S120抱闸控制主要分为简单抱闸控制和扩展抱闸控制,可根据应用场合不同而灵活选用。本文主要介绍简单抱闸控制。 S120 简单抱闸控制的特点主要有: ? 通过顺序控制自动激活 ? 静态P1227(零速P1228)检测监控 ? 强制释放抱闸(p0855,p1215),包括有条件或无条件释放抱闸 ? 无条件关闭抱闸(p0858 = 1) ? 取消“使能速度控制器”信号后的抱闸应用(p0856 = 0) 2抱闸功能描述 “简单抱闸控制”专门用于电机抱闸的控制。当驱动不激活时,保持抱闸用于保护驱动装置,以免出现不希望的运动,如位能性的负载或垂直运行的负载出现的危险。 释放和保持抱闸的触发命令通过控制单元(CU)的DRIVE-CLiQ 传送至电机模块,直接把信号互连到电机模块上并进行监控。然后电机模块执行动作并激活保持抱闸的输出。可在 SINAMICS S120/S150 参数手册(功能图2701,2704)中看到详细的顺序控制框图。通过 参数p1215可配置抱闸控制的运行规则,图1所示为简单抱闸控制的顺序图。 打开抱闸的过程: (1) 当符合启动条件后,控制单元发出ON命令,接触器开始闭合,设备开始预充电。完 成后,开始建立励磁; (2) 励磁完成后,打开抱闸的输出信号为1; (3) 此处还可以通过p0855=1强迫释放抱闸命令; (4) 打开抱闸的输出信号为1,=1,可以控制抱闸装置。此时电机并不会立即加 速,否则会出现溜钩的现象; (5) 延迟时间p1216到达之后,电机立即加速,直到稳定状态。p1216的时间需根据现 场情况调节。 关闭抱闸的过程: (1) 当控制单元发出OFF命令后,电机速度开始下降; (2) 电机实际速度或设定速度小于p1226所设定的值; (3) 延迟p1227或p1228时间后,关闭抱闸的输出信号为1; (4) 此处还可以通过p0858 = 1强迫输出关闭抱闸命令; (5) 关闭抱闸的输出信号为1,=1,可以控制抱闸装置。此时变频器输出电流仍 存在,否则会出现溜钩的现象; (6) 延迟时间p1217到达之后,变频器脉冲封锁,输出电流立即降到0。p1217的时间 需根据现场情况调节。
S120 简单抱闸控制 1 简单抱闸控制特点 S120抱闸控制主要分为简单抱闸控制和扩展抱闸控制,可根据应用场合不同而灵活选用。本文主要介绍简单抱闸控制。 S120 简单抱闸控制的特点主要有: ?通过顺序控制自动激活 ?静态P1227(零速P1228)检测监控 ?强制释放抱闸(p0855,p1215),包括有条件或无条件释放抱闸 ?无条件关闭抱闸(p0858 = 1) ?取消“使能速度控制器”信号后的抱闸应用(p0856 = 0) 2抱闸功能描述 “简单抱闸控制”专门用于电机抱闸的控制。当驱动不激活时,保持抱闸用于保护驱动装置,以免出现不希望的运动,如位能性的负载或垂直运行的负载出现的危险。 释放和保持抱闸的触发命令通过控制单元(CU)的DRIVE-CLiQ 传送至电机模块,直接把信号互连到电机模块上并进行监控。然后电机模块执行动作并激活保持抱闸的输出。可在 SINAMICS S120/S150 参数手册(功能图2701,2704)中看到详细的顺序控制框图。通过 参数p1215可配置抱闸控制的运行规则,图1所示为简单抱闸控制的顺序图。 打开抱闸的过程: (1) 当符合启动条件后,控制单元发出ON命令,接触器开始闭合,设备开始预充电。完 成后,开始建立励磁; (2) 励磁完成后,打开抱闸的输出信号为1; (3) 此处还可以通过p0855=1强迫释放抱闸命令; (4) 打开抱闸的输出信号为1,r0899.12=1,可以控制抱闸装置。此时电机并不会立即加 速,否则会出现溜钩的现象; (5) 延迟时间p1216到达之后,电机立即加速,直到稳定状态。 p1216的时间需根据现 场情况调节。 关闭抱闸的过程: (1) 当控制单元发出OFF命令后,电机速度开始下降; (2) 电机实际速度或设定速度小于p1226所设定的值; (3) 延迟p1227或p1228时间后,关闭抱闸的输出信号为1; (4) 此处还可以通过p0858 = 1强迫输出关闭抱闸命令; (5) 关闭抱闸的输出信号为1,r0899.13=1,可以控制抱闸装置。此时变频器输出电流仍
S120的抱闸控制 抱闸控制优先级排列: 1.参数p1215 2.二进制互联参数p1219[0...3] 和p0855 3.静止状态检测逻辑的控制指令 4.通过模拟量互联,使用阈值判断的控制指令 1 激活扩展抱闸功能(Extended brake control) 1.1使用STARTER激活 首先,离线状态下进行驱动轴的配置(Configuration),如图所示 第二步,在右侧界面选择配置驱动数据组(Configure DDS),如图所示: 第三步,进入驱动配置界面,在抱闸配置界面中激活扩展抱闸控制(Extended brake control); 第四步,然后保存,在线后下装(Download CPU / drive unit to target device); 第五步,确认已激活扩展抱闸功能,查看驱动轴参数r108.14,如图所示:
1.2使用BOP20激活扩展抱闸功能 第一步,修改CU参数p0009=2, 第二步,修改CU参数p0108[1].14=1(假定p0108[1]对应所需的驱动轴), 第三步,修改CU参数p0009=0,装置激活扩展抱闸功能, 第四步,检查驱动轴参数r0108.14=1 。 1.3 注意事项 A.没有修改出厂设置时,扩展抱闸控制作为“简单抱闸控制”工作。 B.如果书本型电机模块和带“Safe Brake Relay” 的模块型功率单元检测到已连接抱闸(BR+,BR-之间有阻值),则在自动配置时,简单抱闸控制自动激活(p1215 = 1) ,并自动激活抱闸状态诊断功能(p1278=0)。 C.在不具备内部抱闸控制时,可以由参数(p1215=3) 激活控制。 D.只有启用“带诊断分析的抱闸控制”功能,即p1278=0,才能使用安全功能“Safe Brake Control”。 E.只有书本型电机模块和带“Safe Brake Relay” 的模块型功率单元才可以激活抱闸控制监控(p1278=0)。
S120 简单抱闸控制 S120 Simple Brake Control Single FAQ Edition (2012年4月) 摘要本文介绍了S120 的简单抱闸控制功能。 关键词 S120,简单抱闸控制 Key Words S120, Simple Brake Control 目录 1 简单抱闸控制特点 2 抱闸功能描述 3 抱闸调试过程 4 重要参数 1 简单抱闸控制特点 S120抱闸控制主要分为简单抱闸控制和扩展抱闸控制,可根据应用场合不同而灵活选用。本文主要介绍简单抱闸控制。 S120 简单抱闸控制的特点主要有: ?·通过顺序控制自动激活 ?·静态P1227(零速P1228)检测监控 ?·强制释放抱闸(p0855,p1215),包括有条件或无条件释放抱闸 ?·无条件关闭抱闸(p0858 = 1) ?·取消“使能速度控制器”信号后的抱闸应用(p0856 = 0) 2抱闸功能描述 “简单抱闸控制”专门用于电机抱闸的控制。当驱动不激活时,保持抱闸用于保护驱动装置,以免出现不希望的运动,如位能性的负载或垂直运行的负载出现的危险。
释放和保持抱闸的触发命令通过控制单元(CU)的DRIVE-CLiQ 传送至电机模块,直接把信号互连到电机模块上并进行监控。然后电机模块执行动作并激活保持抱闸的输出。可在 SINAMICS S120/S150 参数手册(功能图2701,2704)中看到详细的顺序控制框图。通过 参数p1215可配置抱闸控制的运行规则,图1所示为简单抱闸控制的顺序图。 打开抱闸的过程: ⑴当符合启动条件后,控制单元发出ON命令,接触器开始闭合,设备开始预充电。完 成后,开始建立励磁; ⑵励磁完成后,打开抱闸的输出信号为1; ⑶此处还可以通过p0855=1强迫释放抱闸命令; ⑷打开抱闸的输出信号为1,r0899.12=1,可以控制抱闸装置。此时电机并不会立即加 速,否则会出现溜钩的现象; ⑸延迟时间p1216到达之后,电机立即加速,直到稳定状态。p1216的时间需根据现 场情况调节。 关闭抱闸的过程: ⑴当控制单元发出OFF命令后,电机速度开始下降; ⑵电机实际速度或设定速度小于p1226所设定的值; ⑶延迟p1227或p1228时间后,关闭抱闸的输出信号为1; ⑷此处还可以通过p0858 = 1强迫输出关闭抱闸命令; ⑸关闭抱闸的输出信号为1,r0899.13=1,可以控制抱闸装置。此时变频器输出电流仍 存在,否则会出现溜钩的现象; ⑹延迟时间p1217到达之后,变频器脉冲封锁,输出电流立即降到0。p1217的时间 需根据现场情况调节。
扩展抱闸功能,相对于简单抱闸控制来说,可以实现复杂的抱闸控制,例如用于电机抱闸和运行抱闸。扩展抱闸功能具有以下功能: ? 强制打开抱闸(p0855, p1215) ? “强制闭合抱闸” 信号为1时闭合抱闸(p0858) ? 用于打开或闭合抱闸的二进制互联输入(p1218, p1219) ? 用于打开或闭合抱闸的阈值的模拟量互联输入(p1220) ? 两个输入之间的“OR/AND” 模块(p1279, r1229.10, r1229.11) ? 可以控制抱闸和控制工作抱闸。 ? 监控抱闸的反馈信号(r1229.4, r1229.5) ? 可配置的响应(A07931, A07932) ? 在取消信号“ 转速控制器使能” 后闭合抱闸(p0856) 抱闸控制有以下几种方式,顺序按优先级排列: ? 参数p1215 ? 二进制互联参数p1219[0...3] 和p0855 ? 静止状态检测逻辑的控制指令 ? 通过模拟量互联,使用阈值判断的控制指令 1 激活扩展抱闸功能(Extended brake control) 1.1使用STARTER激活 首先,离线状态下进行驱动轴的配置(Configuration),如图所示
第二步,在右侧界面选择配置驱动数据组(Configure DDS),如图所示: 第三步,进入驱动配置界面,在抱闸配置界面中激活扩展抱闸控制(Extended brake control); 第四步,然后保存,在线后下装(Download CPU / drive unit to target device);
第五步,确认已激活扩展抱闸功能,查看驱动轴参数r108.14,如图所示: 1.2使用BOP20激活扩展抱闸功能 第一步,修改CU参数p0009=2, 第二步,修改CU参数p0108[1].14=1(假定p0108[1]对应所需的驱动轴), 第三步,修改CU参数p0009=0,装置激活扩展抱闸功能, 第四步,检查驱动轴参数r0108.14=1 。 BOP20的使用请参考以下文档: https://www.doczj.com/doc/8815577998.html,/download/docMessage.aspx?ID=2622&loginID=&srno=&sendt ime= 1.3 注意事项 ? 没有修改出厂设置时,扩展抱闸控制作为“简单抱闸控制”工作。 ? 如果书本型电机模块和带“Safe Brake Relay” 的模块型功率单元检测到已连 接抱闸(BR+,BR-之间有阻值),则在自动配置时,简单抱闸控制自动激活(p1215 = 1) ,并自动激活抱闸状态诊断功能(p1278=0)。 ? 在不具备内部抱闸控制时,可以由参数(p1215=3) 激活控制。
浅谈数控机床的抱闸控制 广州数控信息科技有限公司吴义荣 前言 在数控铣床、斜床身数控车床中,为了锁住与伺服电机相连的垂直或倾斜工作台,防止机床工作台下滑,须对伺服电机进行抱闸控制。一般来说,伺服电机采用带制动器的伺服电机。但在实际应用中,在机床上电、下电、伺服报警时,偶尔会出现工作台下滑的现象,笔者曾经多次处理过类似问题。从笔者接触了解到的抱闸控制的故障来说,主要有接线方法不正确、参数设置不合理、电机选型不当(制动器额定力矩偏小)等原因引起。参数设置不合理、电机选型不当等原因引起的问题比较好处理。本文将从原理分析入手,介绍一种比较有效的接线方法。下文主要以广州数控设备有限公司生产的da98b交流伺服驱动单元、sjt伺服电机(带失电制动器)为例予以说明,其它产品的抱闸控制方法可参考其进行。 抱闸控制要求 总体要求:机床上电后正常工作时,伺服电机抱闸释放;机床断电或伺服报警后,伺服电机制动并保持工作台。而且,在机床上电、下电、伺服报警时,不允许工作台出现瞬时下滑的现象。因此,在机床上电、下电、伺服报警等情况时,还必须满足: 机床上电:伺服电机先激励,延时后再松开抱闸。 运行时报警或突然掉电:高速运转下的电机先减速(由于在高速下制动会严重影响制动器的寿命,甚至会损坏电机,此点在下文“失电控制器”原理介绍时会给予说明)后再抱紧电机,延时后再关闭电机激励。 机床下电:先抱紧电机,由于制动器动作需要时间,因此,必须延时后才能再关闭电机激励。 原理分析 失电制动器 带制动器的sjt伺服电机采用intorq bfk457系列制动器,intorq bfk457系列制动器为常闭型设计,即失电时制动,通电时释放。其工作电源为dc24v,制动器动作时间小于500ms。 intorq bfk457系列制动器的控制原理为:当制动器线圈通电时,线圈产生磁场使衔铁盘吸向磁轭,衔铁盘与制动盘脱离;当线圈断电时,磁通消失,衔铁盘被释放,弹簧施压于衔铁盘,将制动盘压紧,由摩擦产生制动力矩达到制动的目的。由于制动力矩是由摩擦而产生的,因此,该失电制动器只能用于保持工作台,不能用于强制停止机器运动,处于运动状态的机器必须先减速或运动停止后再行抱闸。 da98b信号时序分析
西门子S120变频器抱闸控制探讨 随着S120在工控行业的深入和广泛应用,工程师积累了许多关于调试方面的宝贵经验。 在这里我们将一起探讨一下电机抱闸的控制,希望大家踊跃发言,共同探讨应用案例,分享应用经验,一起解析使用中遇到的问题。我们将从以下几个方面展开讨论: 1、在抱闸装置的打开时间P1216内,装置处于STOP2状态,在此状态下,装置运行在什么状态。 STOP2状态应该是打开抱闸命令开始,经过1216时间结束。关闭抱闸命令开始到脉冲关闭(P1217)。在STOP2状态中,装置的ON信号存在,脉冲使能r899.11存在,运行使能信号=0,(r899.2),此时装置的电流和转矩(如果设定值通道强制为1,p1152=1)不受控。
--------------------------------------------------------------------------------------------------------------------------------------- 2、速度设定值使能,默认只有在抱闸打开后才释放,如果需要在抱闸打开前输出转矩如何设置,此处需要考虑STOP2状态。 --------------------------------------------------------------------------------------------------------------------------------------- ------将p1152改为1后可实现这一功能,可以方便地设置开闸电流门槛的大小。 从实际应用来讲,对于提升类负载,采用“在抱闸打开后再释放速度设定值使能”的方式,当向变频器发出启动信号后,在励磁过程已结束时打开抱闸(开闸电流门槛设置到略高于励磁电流,电机在励磁过程中的励磁电流是大于额定励磁电流的),吊重载时的使用情况也很正常。 如果采用将p1152改为1后,在抱闸打开前就输出转矩的设置,开闸输出转矩的大小要根据实际使用情况逐步调整到合理的值。6SE70变频器的速度设定值使能缺省值为1,和S120变频器的将p1152改为1后的结果相同,现场一提升机的应用中,额定励磁电流为45%,开闸电流门槛设为30%,在交车做超载试验时未出现溜钩现
6SE70变频装置调试步骤(抱闸控制) 6SE70装置的外围设计与调试步骤紧密相关,本文针对海鑫线材工程6SE70装置设计,陈述调试过程。 一内控参数设定 1.1出厂参数设定 P053=7 允许CBP+PMU+PC机修改参数 P60=2 (固定设置,参数恢复到缺省) P366=0 (PMU控制) P970=0 (启动参数复位) 执行完上述参数出厂设置后,只是对变频器的设定与命令源进行设定,P366参数选择不同,变频器的设定和命令源可以来自(端子,OP1S,PMU),可以进行简单变频器操作。但电机和控制参数组未进行设定,不能实施电机调试。 1.2 简单参数设定 P60=3 (简单应用参数设置,在上述出厂参数设置的基础上,本应用设定电机,控制参数) P071= 公共直流母线电压 P95=10(IEC电机) P100= 1(V/F开环控制),3(不带测速机的矢量控制),4(带测速机的矢量控制) P101= 电机额定电压(V) P102= 电机额定电流(A) P104= 功率因数(IEC)计算方式COSф=电机功率/(1.732*电机额定电压*电 机电流) P107= 电机额定频率HZ P108= 电机额定速度RPM P368=0(设定和命令源为PMU+MOP) P370=1(启动简单应用参数设置) P60=0(结束简单应用参数设置) 执行完上述参数设定后,变频器自动的根据P100(控制方式),P368(设定和命令源),P101-P109(电机参数)组合功能图连接和参数设定。P368选择的功能图见手册S0-S7,P100选择的功能图见手册R0-R5,对应的P040,P042显示速