
自动控制原理作业题
第一章基本概念
一、简答题
1 简述自动控制的基本概念
2 简述自动控制系统的基本组成
3 简述控制系统的基本控制过程
4 简述自动控制系统的基本分类
5 试比较开环控制和闭环控制的特点
6 简述自动控制系统的性能评价指标
二、分析计算题
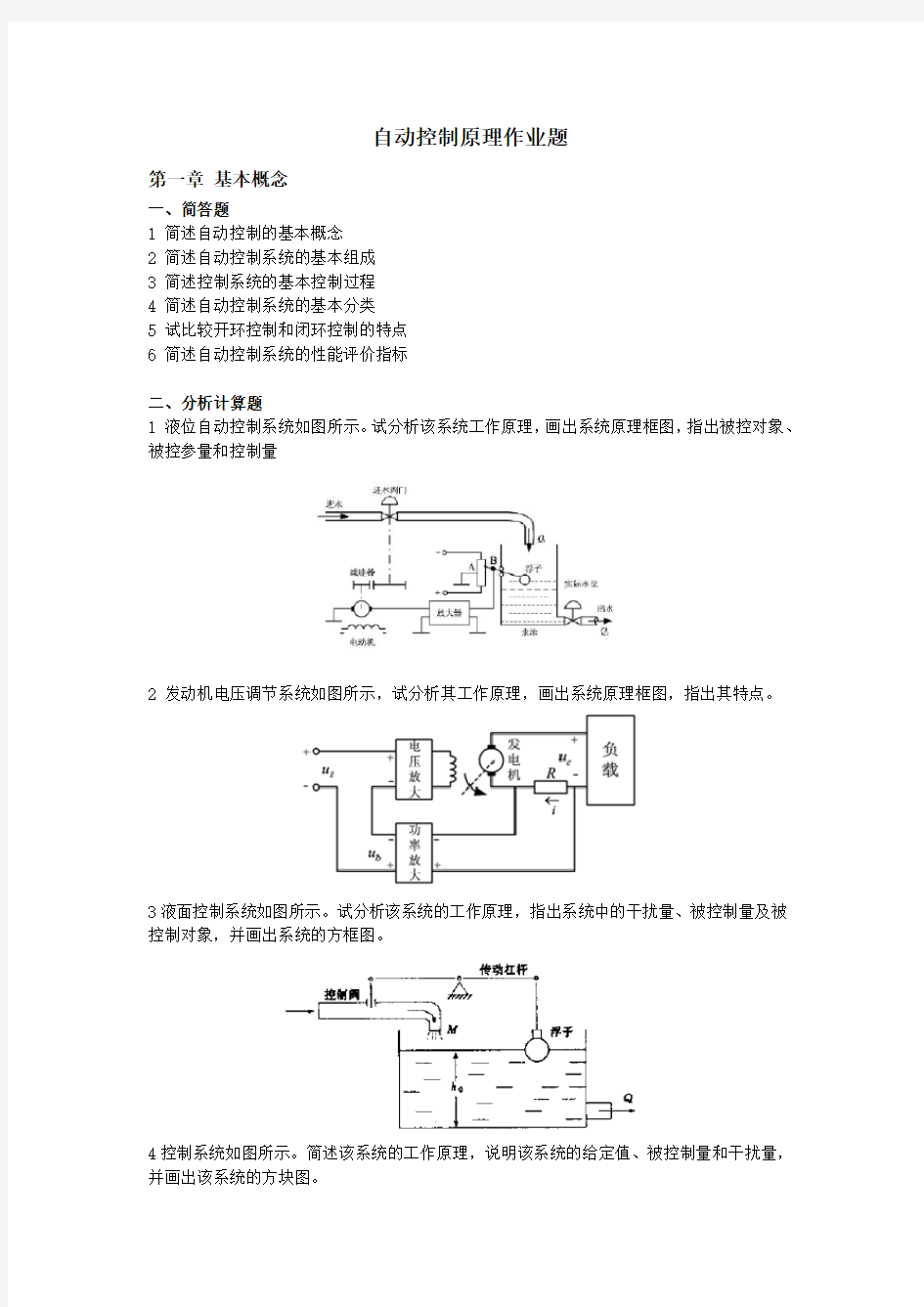
1 液位自动控制系统如图所示。试分析该系统工作原理,画出系统原理框图,指出被控对象、被控参量和控制量
2 发动机电压调节系统如图所示,试分析其工作原理,画出系统原理框图,指出其特点。
3液面控制系统如图所示。试分析该系统的工作原理,指出系统中的干扰量、被控制量及被控制对象,并画出系统的方框图。
4控制系统如图所示。简述该系统的工作原理,说明该系统的给定值、被控制量和干扰量,并画出该系统的方块图。
图1-7发电机-电动机调速系统
操纵电位计
发电机
伺服电机
减速器
负载
Θr
给定值Ur 前置放大器功放执行元件
被控量
Wm
这是一个开环控制的例子
+E
-E
Θr
Ur
操纵电位计
R1
R2
R3
R4
放大器
直流发电机
伺服电机Wd Wm
发电机-电动机调速系统
减速器
负载
5火炮随动控制系统如图所示。简述该系统的工作原理,并画出该系统的原理框图。
第二章 线性控制系统的数学模型
一、简答题
1 简述建立控制系统数学模型的方法及其数学表示形式
2 简述建立微分方程的步骤
3 简述传递函数的基本概念及其特点
4 给出组成控制系统典型基本环节
二、分析计算题
1 有源电网络如图所示,输入量为)(1t u ,输出量为)(2t u ,试确定该电网络的传递函数
2 电枢控制式直流电动机原理图如图所示,输入量为)(1t e ,输出量为)(t o ,试确定其微分方程。
图中,电动机电枢输入电压;电动机输出转角;电枢绕组的电阻;电枢绕组的电感;流过电枢绕组的电流;电动机感应电势;电动机转矩;电动机及负载这和到电动机轴上的转动惯量;电动机及负载这和到电动机轴上的粘性摩擦系数。
3 某RC 电路网络原理图如图所示,电压()i u t 为输入量,()o u t 为输出量,试画出其方块图,并求其传递函数。
1
2
()
o u t ()
i u t 1
C 2
C 123()i t 3()u t +
+
-
-
4 某控制系统方块图如图所示,被控制量为)(s C ,控制量为)(s R ,试用梅森公式确定该系统的传递函数
5 某控制系统的信号流图如图所示,被控制量为)(s C ,控制量为)(s R ,试用梅森公式确定其传递函数
第三章 线性控制系统的时域分析
一、简答题
1控制系统的典型输入信号有哪几个? 2 评价控制系统的动态性能指标由哪些?
3 简述控制系统稳定的基本概念及系统稳定的充要条件
4 简述控制系统稳态误差的基本概念
5 简述一阶控制系统的基本概念及其主要特点
6 简述控制系统中闭环主导极点的符合条件
二、分析计算题
1 某单位负反馈控制系统的开环传递函数为)
12)(1()
1()()(+++=
s Ts s s K s H s G ,求该系统稳定
时,参数K 和T 的取值范围
2已知控制系统方块图如图所示。若使系统的单位阶跃响应具有σp =16.3%,t p =1秒。试确定前置放大器的增益K 及内反馈系数τ。
3 某单位负反馈控制系统的开环传递函数为)1)(1()(6
1
31s s s k
s G ++=,求:系统稳定时,k 值的取值范围。
4 温度计的传递函数为1
1
)(+=
Ts s G 。用其测量某一容器中的水温,发现经1分钟后才能指示出实际水温的96%,求:(1)该温度计的指示从实际水温的10%变化到90%所需要的时间;(2)如给该容器加热,使容器内水温以0.1s C /?的速度均匀上升,温度计的稳态指示误差有多大。
5 某位置随动控制系统如图所示,求:(1)系统的开环极点和闭环极点;(2)输入为单位阶跃函数信号时,系统的自然振荡角频率和阻尼比;(3)系统的动态性能指标上升时间、调节时间和超调量。
6 某单位负反馈自动控制系统的开环传递函数为)
12.0)(1(10
)(++=s s s s G ,求输入为斜坡
函数信号时,该系统的稳态误差。
7 某系统在领初始条件下的单位阶跃响应为t t
e e t c 10602.12.01)(---+=,试确定该系统的
闭环传递函数。
8 某单位负反馈控制系统的开环传递函数为)
2)(1()(++=s s s k
s C ,试系统闭环稳定时k
的取值范围。
第四章 线性控制系统的根轨迹分析
一、简答题
1 简述根轨迹的基本概念
2 简述绘制根轨迹的依据
3 简述绘制根轨迹的基本规则
二、分析计算题
1 某控制系统的开环传递函数为(4)()(2)k s G s s s +=+,试绘制系统的概略根轨迹图
2 设一控制系统方框图如图4-5所示,试绘制系统根轨迹。
(1)(2)
k
s s s ++-
)
(s R )
(s C
图4-5 控制系统方框图
3 某控制系统的根轨迹如图所示。由系统的根轨迹图,求:1)确定系统稳定时参数k 的范围;2)确定系统阶跃响应无超调时k 的取值范围;3)系统出现等幅振荡时的振荡频率。
4 某单位负反馈控制系统的的根轨迹如图所示,求:?=60β时,计算系统的动态性能指标
5已知单位负反馈控制系统的开环传递函数为)
15.0()()(+=s s K
s H s G ,应用根轨迹法分析开环
放大倍数K 对系统的影响,计算K=5时系统的性能。
第五章 线性控制系统的频率特性分析
一、简答题
1 简述频率特性的基本概念
2频率特性的几何表示方法有哪几种? 3 简述奈奎斯特稳定判据
4 简述控制系统时域指标和频域指标
5 简述频域法分析和设计系统时常用的“三频段”的特点
二、分析计算题
1 某单位负反馈控制系统的开环传递函数为2
10(3)
()(2)(2)s G s s s s s +=+++,试绘制系统的开环对数频率特性图
2 最小相位系统开环对数幅频特性渐近曲线如图所示,求系统的开环传递函数。
3 某单位负反馈控制系统开环对数频率特性图如图所示,试求:(1)系统的开环传递函数;(2)系统的相角裕度与幅值裕度,判别系统的稳定性;(3)闭环系统稳定的K 的临界值。
4某最小相位系统的奈奎斯特图如图所示(具有正实部开环极点的个数为0,即P=0),试分析系统的稳定性及其系统的类型数
5 已知控制系统的开环传递函数
100
()()
(21)(0.21)
G s H s
s s s
=
++
,求:1)画出系统的开环
传递函数的对数幅频特性图;2)计算系统的相角裕度r(ωc);3)判断系统的稳定性。
第六章线性控制系统的串联校正
一、简答题
1 简述系统校正的基本概念
2 简述校正方式的基本特点
3 简述基于频率特性分析法校正的基本原理
4 简述超前校正的特点
5简述滞后校正的特点
6简述期望频率特性法校正的特点
二、分析计算题
1 控制系统的开环对数幅频特性曲线如所示,其中虚线L1为校正前的,实线L2为校正后的,实线L C为校正环节。求:1)确定所用的是何种串联校正,并写出校正装置的传递函数G c(s);2)确定校正后系统稳定时的开环增益;3)当开环增益k =1时,求校正后系统的相位裕度,幅值裕度k g(dB)。
2 单位负反馈系统不可变部分的传递函数为()
(0.51)o K
G s s s =
+,要求满足性能指标:(1)
开环放大倍数
1
20V K s -=;(2)相角裕度
()50c γω≥?;设计串联超前校正。
3某最小相位系统校正前、后开环对数幅频特性分别如图所示。求:1)校正前、后系统的传递函数;2)校正前、后系统的相角裕量;3)校正网络的传递函数;4)校正网络的校正类型。
4 某单位反馈系统的开环传递函数为0()(1)(1)(1)
530
K
G s s s s =
+++,试设计PID 控制器。要求:
(1)稳态速度误差0.1ssv e ≤;(2)超调量20o o o o p σ≤;(3)调节时间0.5s s t ≤。
5 由实验测得单位反馈二阶系统的单位阶跃响应,如图所示。要求:(1)绘制系统的方框图,并标出参数值;(2)系统单位阶跃响应的超调量 %20%p σ=;(3)峰值时间0.5p t s =。设计校正环节并画出校正后系统的方框图。
0.1
t
答案
第一章基本概念
一:简答题
1、自动控制:是指在有人的直接参与的情况下,利用外加的设备或装置,使机器、设备或生产过程的某个工作状态或参数自动地按照预定的规律运行。
2、自动控制系统的基本组成:给定元件、测量元件、比较元件、放大元件、执行元件、校正元件。
3、控制系统的基本控制过程:原来处于平衡状态的生产过程,一旦受到扰动作用,被调量偏离原来平衡状态,通过施加调节作用使被调量重新恢复到新的平衡状态的过程,称为控制过程。
4、自动控制系统的基本分类
按控制原理的不同分类:分为开环控制系统、闭环控制系统。
按给定信号分类:分为恒值控制系统、随动控制系统、程序控制系统。
5、开环控制的特点:结构简单,成本低,工作稳定。用于系统输入信号及扰动作用能预先知道时可得到满意的效果。但不能自动调节被控量的偏差,因此系统元件参数变化,外来未知扰动存在时,控制精度差。
闭环控制的特点:不管由于干扰或由于系统本身结构参数变化所引起的被控量偏离给定值,都会产生控制作用去清除此偏差,所以控制精度较高,它是一种按偏差调节的控制系统,在实际中应用广泛。但被控量可能出现波动,严重时系统无法工作。
6、自动控制系统的性能评价指标:稳定性、快捷性、准确性。
二:分析计算题
1、系统工作原理:当电位器电刷B位于中点位置A处时,电动机不动,控制阀门有一定的开度,使水箱中流入水量和流出水量相等,从而液面保持在希望高度上。当进水或出水量发生变化,例如液面下降,通过浮子检测出来,使电位器电刷从中点位置A处上移,从而给电动机提供一定的控制电压,驱动电动机通过减速器增大进水阀门的开度,使液位上升,回到希望高度,直到电位器电刷B回到中点位置A处,电动机停止。反之,若液面上升,系统则会通过电机减小进水阀门的开度,使进入水箱的流量减小,使液面下降到希望的高度。
系统原理框图