
基于hyperworks的某轨道列车刚柔耦合模型计算
董思
(青岛四方庞巴迪铁路运输设备有限公司、山东青岛、266111)
摘要:从高速动车组运用的舒适性角度出发,考虑到车体的弹性变形对乘客的舒适性影响,需要将车体处理成柔性车体。本文借助有限元分析软件hyperworks中的optistruct对车体进行结构模态综合分析,然后将结构模态综合分析的结果导入到多体动力学软件中,进行刚柔耦合模型建立。
关键词:高速动车组;柔性车体;hyperworks;刚柔耦合
1 概述
我国幅员辽阔,人口流动大,铁路运输以其运载量大、经济性好、安全可靠、绿色环保等优势在国民经济中发挥重要作用。在短短几年间,经过几次大提速,列车运行速度从160km/h逐渐提升到380km/h。高速动车组由于运行速度高,车辆的振动更加显著,这直接影响到乘坐人员的舒适性。因此车辆舒适性研究显得越来越重要。在舒适性计算中需要考虑车体的柔性影响,就需要把车体做成柔性体。常规车辆的多体动力学计算通常把车体、构架和轮对考虑为刚性,通过弹簧阻尼元件联结。刚柔耦合系统动力学是在多刚体动力学基础上发展起来的。
2 柔性车体模型建立
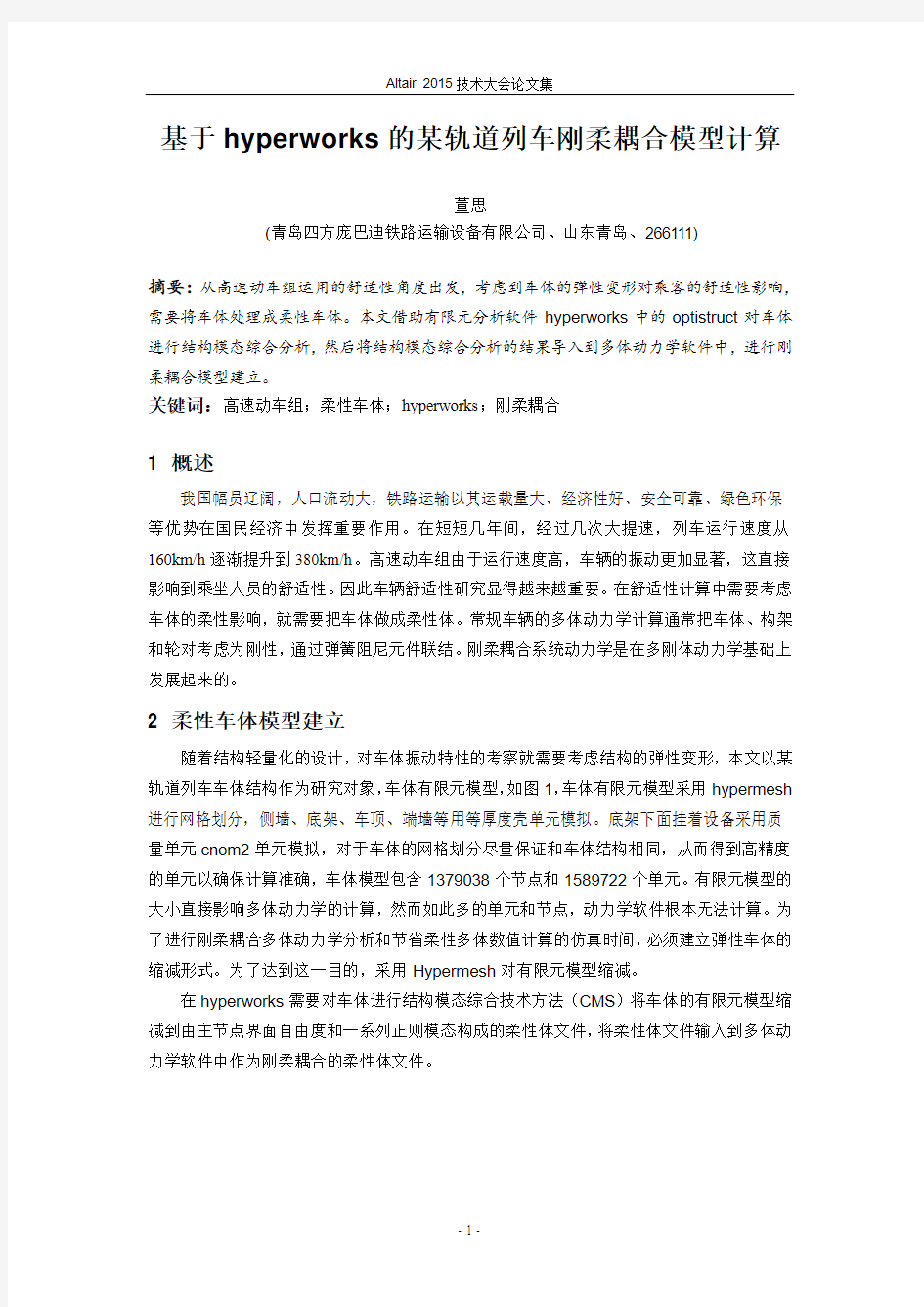
随着结构轻量化的设计,对车体振动特性的考察就需要考虑结构的弹性变形,本文以某轨道列车车体结构作为研究对象,车体有限元模型,如图1,车体有限元模型采用hypermesh 进行网格划分,侧墙、底架、车顶、端墙等用等厚度壳单元模拟。底架下面挂着设备采用质量单元cnom2单元模拟,对于车体的网格划分尽量保证和车体结构相同,从而得到高精度的单元以确保计算准确,车体模型包含1379038个节点和1589722个单元。有限元模型的大小直接影响多体动力学的计算,然而如此多的单元和节点,动力学软件根本无法计算。为了进行刚柔耦合多体动力学分析和节省柔性多体数值计算的仿真时间,必须建立弹性车体的缩减形式。为了达到这一目的,采用Hypermesh对有限元模型缩减。
在hyperworks需要对车体进行结构模态综合技术方法(CMS)将车体的有限元模型缩减到由主节点界面自由度和一系列正则模态构成的柔性体文件,将柔性体文件输入到多体动力学软件中作为刚柔耦合的柔性体文件。
图1车体有限元模型
结构模态综合技术需要指定主节点(界面点),目的用于描述结构因主节点(界面点)上的约束或载荷产生的变形。通常在受约束的系统中,相对结构惯性力引起的变形,由约束力引起的变形更能起到主导作用,因此将所有承载点设置为主节点(界面点)是获得正确的柔性多体动力学分析结果的重要一步。结构模态综合过程中使用的主节点(界面点)与后续的多体动力学软件中的约束、加力、加铰接的点必须一致。在多体动力学软件中柔性体与刚体的相互作用是通过定义在柔性体主节点(界面点)上的约束或力元实现的。车体有限元模型大,自由度多,增加运算困难,可通过optistruct中的BSET语句释放具有动力学特性的界面点的自由度来降低柔性体文件的规模,如图2。CMSMETH(结构模态综合技术)采用CBN方法计算并输出外部超单元和多体软件的刚柔耦合分析用到的柔性体文件。
图2 释放车体界面点自由度
2 刚柔耦合模型建立及舒适性计算
输出的车体柔性体文件导入到多体动力学软件中,车体上的界面点通过弹簧、阻尼元件和刚性转向架相联结,如图3。测量车体上3个点的加速度,如图4。
图3 整车刚柔耦合模型
图4 车底测量点(主视图+俯视图)
为了正确衡量车辆的运行品质,各国铁路都根据运送货物和输送旅客的要求,制定各种指标来评估车辆及其转向架的运行品质。乘坐舒适性评价指标有UI C Sperling 评价指标W 、国际标准化组织的评价指标ISO2631等等。
欧洲铁路联盟(UIC )以及前社会主义国家铁路合作组织(OCKII )均采用Sperling 平稳性指数来评定车辆的运行品质。车辆运行平稳性指数的经验公式为
103
105
3
)
(896.0)(7.2f F f f F W a f
z == (1)
其中
Z
0 — 振幅(cm );
f — 振动频率(Hz );
a — 加速度(cm/s 2),其值为
2
0)2(f a z ∏=;
)(f F — 与振动频率有关的加权系数,)(f F 对于垂向振动和横向振动是不同的。
表1 频率修正系数)(f F
以上的平稳性指数只适用一种频率一个振幅的单一振动,但实际上车辆在线路上运行时的振动是随机的,即频率和振幅都是随时间变化的。因此在整理车辆平稳性指数时,把实测的车辆振动加速度记录,通常按频率分类,进行频谱分析,求出每段频率范围内的振幅值,然后对每一频段计算各自的平稳性指数全部频段总的平稳性指数i W ,然后再求出全部频段
总的平稳性指数
1
.010
102101)...(W W W n tot W +++= (2)
稳性指数等级按表2进行分类。
表2 平稳性指标
通过计算不同速度等级的车辆运行平稳性,轨道激扰设置如下:车速低于160km/h 采用德国标准高干扰谱,车速大于等于160km/h 采用德国标准低干扰谱。按照图4的测量点计算车辆的W 值,横向W 值如图5,垂向W 值如图6。
图5 横向W值
图6 垂向W值
3 结论
通过上述研究工作,可以得到如下主要结论:
(1) 高速车和普通列车的设计及速度不同,振动更加强烈,为了保证计算准确性,需要将车体考虑为柔性体。
(2) 车体有限元模型较大,为了保证刚柔耦合模型能顺利计算,有限元软件HyperWorks 中的CMSMETH(结构模态综合技术)车体有限元模型进行模态缩减。
4 参考文献
[1] RADIOSS, MotionSolve and Optistruct , Altair HyperWorks online help.
[2] 李修峰,王亚斌,王晨编《MotionView & MotionSolve 应用技巧与实例分析》机械工业
出版社2013.
[3] 严隽耄,傅茂海《车辆工程》(第三版)中国铁道出版社2009.
[4] 周素霞,陶永忠《SIMPACK 9 实例教程》北京联合出版公司2013.
ADAMS柔性体-刚柔耦合模块 一、ADAMS柔性体理论 1、ADAMS研究体系: a)刚体多体系统(低速运动) b)柔性多体系统(考虑弹性变形,大轻薄,高速) c)刚柔耦合多体系统(根据各个构件情况考虑,常用普遍仿真类型) 大部分仿真分析都采用的是刚性构件,在受到力的作用不会产生变形,现实中把大部分构件当做刚性体处理是可以满足要求的,因为各个零件之间的弹性变形对于机构各部分的动态特性影响微乎其微。 但是需要考虑构件变形,变形会影响精度结果,需要对构件其应力大小和分布以及载荷输出研究的时候,以及薄壁构件,高精密仪器部件等,则需要当做柔性体对待,这样计算结果会准确一些。对于柔性体机构,变形对动态影响起着决定性作用,刚柔耦合系统约束的添加必须考虑各个零部件之间的连接和受力关系,更可能还原实际工况,从而使模型更真实还原。 2、柔性体 柔性体是由模态构成的,要得到柔性体就需要计算构件的模态。柔性体最重要的假设就是仅考虑了相对于连体坐标系得晓得线性变形,而连体坐标系同时也在做大的非线性运动。 对于柔性体变形,模态中性文件必然存在某一些模态不响应,没有参与变形或者变性太大,参与系数非常小,比如前六阶或者不正常的阶数,如果去掉贡献较小的模态阶数,便可以提高仿真的效率。 ………… 3、模态 谈到柔性体,就必然脱不了模态的概念,构件的模态是构件自身的一个物理属性,一个构件一旦制造出来,他的模态就是自身的一种属性,再将几何模型离散成有限元模型以后,有限元模型的各个节点有一定的自由度,这样所有的节点自由度的和就构成了有限元模型的自由度,一个有限元模型有多少自由度,它就有多少阶模态。由于构件各个节点的实际位移是模态的按一定比例的线性叠加,这个比例就是一个系数,通常成为模态参与因子,参与因子越大,对应的模态对于构件变形的贡献量越多,因此对构件的振动分析,可以从构件的模态参与因子大小来分析,如果构建在振动时,某阶模态的参与因子大,可以通过改进设计,抑制改接模态对振动贡献量,可以明显降低构件的振动。 利用有限元技术,通过计算构件的自然频率和对应的模态,按照模态理论,将构件产生的变形看作是由构件模态通过线性计算得到的。在计算构建模态时,按照有限元理论,首先要将构件离散成一定数量的单元,单元数量越多,计算精度越高,单元之间通过共用一个节点来转递力的作用,在一个单元上的两个点之间可以产生相对位移,再通过单元的材料属性,进一步计算出构建的内应力和应变。 …………柔性体模态与有限元模态区别不同? …………约束模态? …………正交模态? ADAMS中建立柔性体的三种方法:离散柔性连接杆、ADAMS/ViewFlex模块生成mnf文件、FEA有限元软件输出mnf文件 二、离散柔性连接杆 1、定义:将一个构件离散成几段或者许多段小刚性构件,每个小刚性构件之间通过柔性梁连接,变形
附件:龙门吊基础验算 一、门吊钢跨梁强度验算 1.概述 龙门吊过跨梁采用上下铺设40mm厚盖板和30mm厚腹板组焊而成箱形结构梁,中间间隔1.5m均匀布置16mm厚隔板,整体高度455mm。所用材料主要采用Q345B高强钢,结构形式见图(一) 图一龙门吊钢跨梁结构形式图 2.计算载荷工况: 2.1计算载荷:钢板组合梁上只运行16T门吊,45T门吊则不再钢梁上运行,16T 门吊自重70吨,吊重16吨,走行轮数4,单个轮压G=(70/2+16)/2=25.5T,垂向动荷系数取1.4,单个轮压为G*1.4=35.7T。(门吊轮距7.5m) 2.2载荷工况: 工况1,门吊运行到一轮压地基面端部,一轮压过跨梁上。 工况2,门吊运行到过跨梁中部时工况。 2.2材料的许用应力: 3.有限元建模
过跨梁钢结构有限元模型见图(二)。由于为左右对称结构,采用实体单元进行网格的自动划分。该模型共划分了54768 个单元, 43581个节点。 图二过跨梁钢结构有限元模型 4 结论: 工况1:过跨梁最大应力为109.98 MPa(见图三)、最大静挠度为15.6mm (见图四),挠跨比为14.66/21000=1/1432<1/500; 工况2:过跨梁最大应力为168.26 MPa(见图五)、最大静挠度为36.2mm (见图六),挠跨比为34/21000=1/617<1/500; 在载荷工况下,最大应力均小于材料的许用应力,刚度小于钢结构设计规范挠跨比1/500,过跨梁最大强度和刚度均满足使用要求。 图三过跨梁工况1应力云图
图四过跨梁工况1应变云图 图五过跨梁工况2应力云图 图六过跨梁工况2应变云图 二、门吊扩大基础承载力计算 龙门吊轨道梁基础为500mm*600mm,扩大基础图如图七所示,梁上预埋螺栓,铺设43#钢轨,轨道之间预留5mm收缩缝、接地线,轨道末端做挡轨器。
ANSYS与ADAMS进行联合柔性仿真 基本思路:在ANSYS进行.mnf文件输出,然后把输出的.mnf文件输入ADAMS,进行零件更换。然后在ADAMS 进行加载约束,仿真,查看结果。 软件:ANSYS10,ADAMS 2007 R3 具体步骤: 一ANSYS输出.mnf柔性文件 1.1 建立单元 单元1:solid45 或者其他3D单元 单元2:MASS21,此单元只用于连接点单元 设置弹性模量,泊松比,密度3个参数 1.2导入模型(.x_t)或者建立模型 完成后,创建连接点,ANSYS要求必须是2或者2个以上的连接点
创建连接点:如下图,在下面2个圆柱孔的中心,注意是圆柱体的中心,不是某个面得中心,创建2个keypoints。具体方法,看个人而定。 1.3 划分单元 对体用3D单元划分,我选用meshtool方法
接下来设置real constants,这个参数设置,一定要到等到3D网格划分完后再设置 对MASS21 进行设置。
Real constant Set No. 要大于2,下面的值要非常小。 然后对连接点,即keypoints进行单元划分:先设置keypoints 属性,如下 然后划分单元,用meshtool, 对keypoints划分单元,结果如下如下图
1.4建立刚性区域 刚性区域都是节点=连接节点+刚柔接触的面上所有节点 在ANSYS里面,这一步,连接点为主节点,刚柔接触面上的所有节点为从节点首先得按如下2个图片进行主节点和从节点节点组合。(或者用循环语句也行)
1.4.1建立主节点component 选择1个主节点,即连接节点。 接下来
附件一 1 预制梁场龙门吊计算书 1.1工程概况 1.1.1工程简介 本项目预制梁板形式多样,分别为预制箱梁、空心板及T梁,其中最重的是30m 组合箱梁中的边梁,一片重达105t。预制梁场拟采用两台起吊能力为100t的龙门吊用于预制梁的出槽,其龙门吊轨道之间跨距为36.7m。 1.1.2地质情况 预制梁场基底为粉质粘土。查《路桥施工计算手册》中碎石土的变形模量E0=29~65MPa,粉质粘土16~39MPa,考虑最不利工况,统一取粉质粘土的变形莫量E0=16 MPa。临建用地经现场动力触探测得实际地基承载力大于160kpa。 1.2基础设计及受力分析 1.2.1龙门吊轨道基础设计 龙门吊轨道基础采用倒T型C30混凝土条形基础,基础底部宽80cm,上部宽40cm。每隔10m设置一道2cm宽的沉降缝。基础底部采用8根Φ16钢筋作为纵向受拉主筋,顶部放置4根Φ12钢筋作为抗负弯矩主筋,每隔40cm设置一道环形箍筋。,箍筋采用HPB235Φ10mm光圆钢筋,箍筋间距为40cm,具体尺寸如图1.2.1-1、1.2.1-2所示。
图1.2.1-1 龙门吊轨道基础设计图 图1.2.2-2 龙门吊轨道基础配筋图 1.2.2受力分析 梁场龙门吊属于室外作业,当风力较大或降雨时候应停止施工。当起吊最重梁板(105t)且梁板位于最靠近轨道位置台座的时候为最不利工况。
图1.2-1 最不利工况所处位置 单个龙门吊自重按G1=70T估算,梁板最重G2=105t。起吊最重梁板时单个天车所受集中荷载为P,龙门吊自重均布荷载为q。 P=G1/2=105×9.8/2=514.5KN (1-1) q=G2/L=70×9.8/42=16.3KN/m (1-2)当处于最不利工况时单个龙门吊受力简图如下: ` 图1.2-3 龙门吊受力示意图 龙门吊竖向受力平衡可得到: N1+N2=q×L+P (1-3)取龙门吊左侧支腿为支点,力矩平衡得到: N2×L=q×L×0.5L+P×3.5 (1-4)由公式(1-3)(1-4)可求得N1=869.4KN,N2=331.1KN 龙门吊单边支腿按两个车轮考虑,两个车轮之间距离为6m,对受力较大支腿进行分析,受力简图如下所示:
第42卷第11期 2008年11月 上海交通大学学报 JOU RN AL O F SH AN G HA I JIA OT O N G U N IV ERSIT Y Vol.42No.11 Nov.2008 收稿日期:2007 10 08 基金项目:国家自然科学基金资助项目(10772113);高等学校博士学科点专项科研基金资助项目(20040248013) 作者简介:洪嘉振(1944 ),男,浙江宁波市人,教授,博士生导师,研究方向:多体系统动力学与控制.电话(T el.):021 ********; E mail:jzhong@s https://www.doczj.com/doc/9913345897.html,. 文章编号:1006 2467(2008)11 1922 05 刚柔耦合动力学的建模方法 洪嘉振, 刘铸永 (上海交通大学工程力学系,上海200240) 摘 要:对柔性多体系统动力学研究的若干阶段和研究现状进行回顾,对已有的刚柔耦合动力学建模方法进行总结.为了对已有的建模方法进行评价,提出了5项指标:科学性、通用性、识别性、兼容性和高效性,指出现有的建模方法尚无法满足工程实际应用的需要,应研究满足全部评价指标的刚柔耦合动力学建模方法.文中对今后柔性多体系统刚柔耦合动力学的几个研究方向进行展望,包括理论建模、计算方法和试验研究等方面. 关键词:刚柔耦合系统;动力学;建模方法;评价指标中图分类号:O 313 文献标识码:A Modeling Methods of Rigid Flexible Coupling Dynamics H ON G J ia z hen, L I U Zhu y ong (Department of Engineering M echanics,Shanghai Jiaotong Univ er sity,Shanghai 200240,China)Abstract:A brief review about several phases and present status o f flexible multi bo dy dynamics w as given and the ex isting m odeling m ethods o f r ig id flex ible coupling dynam ics w ere sum marized.Five indexes,in cluding scientific index,g eneral index,identifiable index,compatible index and efficient index ,w ere pro posed to evaluate the ex isted mo deling methods.It show s that the ex isted m odeling metho ds can no t satis fy the actual needs of eng ineer ing application and new modeling m ethod w hich satisfies all the evaluating index es should be inv estig ated.T he r esearch tar gets including modeling theor y,com putational methods and exper im ents w er e sugg ested for the rigid flexible co upling dynamics o f the flex ible multi body sys tems. Key words:rigid flex ible coupling sy stem s;dy nam ics;mo deling methods;evaluating index 柔性多体系统是指由多个刚体或柔性体通过一定方式相互连接构成的复杂系统,是多刚体系统动力学的自然延伸.考虑刚柔耦合效应的柔性多体系统动力学称之为刚柔耦合系统动力学,主要研究柔性体的变形与其大范围空间运动之间的相互作用或相互耦合,以及这种耦合所导致的动力学效应.这种耦合的相互作用是柔性多体系统动力学的本质特 征,使其动力学模型不仅区别于多刚体系统动力学,也区别于结构动力学.因此,柔性多体系统动力学是 与经典动力学、连续介质力学、现代控制理论及计算机技术紧密相联的一门新兴交叉学科[1 3],它对高技术、工业现代化和国防技术的发展具有重要的应用价值. 根据力学的基本原理,基于不同的建模方法,得
目录 1 编制依据1 2 工程概况1 3 龙门吊设计1 3.1 龙门吊布置1 3.2 龙门吊轨道梁设计1 4 主要施工方法4 4.1 施工顺序及工艺流程4 4.2 基底回填4 4.3 素砼垫层施工4 4.2 基础钢筋4 4.3 基础砼5 4.4 轨道安装5 5 质量控制标准6 6 安全文明施工7 6.1 安全施工7 6.2 文明施工措施8
1 编制依据 1、《***》施工图、《***》施工图; 2、龙门吊生产厂家提所供有关资料; 3、《建筑地基基础设计规范》(GB50007-2002); 4、《砼结构设计规范》(GB50010-2002)。 2 工程概况 ***。 3 龙门吊设计 3.1 龙门吊布置 ***布置3台龙门吊,一期围挡布置一台,跨度21m,起重量10t,二期围挡布置2台,跨度15m,起重量10t;轨道均采用P38钢轨,轨道平面布置图如附图1。 3.2 龙门吊轨道梁设计 两种跨度龙门吊,轨道梁梁设计按21m跨度进行。21m跨度龙门吊整机自重18.5t,最大起重量10t。单侧两个轮压为18.5÷2+10=19.25t,单个轮压为9.6t;施工过程中考虑施工安全系数为1.1,则单个轮压为10.56t(即105.6kN) 1、轨道梁断面形式 轨道梁截面形式采用500mm(宽)×400mm(高),混凝土采用C30砼。 2、轨道梁受力计算 按照文克勒地基模型计算本工程轨道梁,混凝土承载力大于杂填
土,整体按500mm ×400mm 梁考虑,该段轨道梁长L 约90m ,根据《地基与基础》中计算公式 44EI kb =λ 其中: k ——基床系数,本工程为卵砾石,取 3.0×104kN/m 3,即 3.0×10-2N/mm 3; C30混凝土取E=3×104 N/mm 2; 49331067.240050012 1121mm bh I ?=??== 则m mm 47.01065.410 67.21034500100.344942=?=??????=--λ L=100m, πλ>=?=4710047.0L ,故该段轨道梁为无限长梁。 对于无限长梁 ()x x x e P M λλλλ sin cos 04-= x x x e D P V λλcos 02 --= ()x x x e b P P λλλλsin cos 02+-= 当0=x λ时,M 、V 、P 均取最大值 m kN P M ?=?== 17.5647 .046.10540λ kN P V 8.522 6.10540=== kPa b P P 63.495.024 7.06.10520=??==λ 3、轨道梁配筋计算 根据混凝土结构设计规范,混凝土保护层取45mm ,C30混凝土轴
兰州市轨道交通1号线一期工程 (陈官营~东岗段) 七里河站龙门吊基础施工方案 编制: 审核: 审批: 八冶建设集团有限公司 兰州轨道交通1号线一期TJⅡ-8B项目部
2015年03月14日
目录 一、编制依据 (2) 二、工程概况 (2) 三、龙门吊基础设计 (3) 3.1 龙门吊布置 (3) 3.2 龙门吊轨道梁及垫层设计 (4) 四、主要施工方法 (8) 4.1施工顺序及工艺流程 (8) 4.2基础开挖 (8) 4.3素砼垫层 (8) 4.4基础钢筋 (9) 4.5基础砼 (9) 4.6轨道安装 (10) 五、质量控制标准 (12) 六、安全及文明施工 (13) 6.1 安全施工 (13) 6.2文明施工措施 (13)
七里河站龙门吊基础施工 一、编制依据 1.《建筑地基基础设计规范》 2.《混凝土结构设计原理》 3.《七里河站主体结构施工图》 4.《七里河站围护结构施工图》 5. 龙门吊生产厂家所提供有关资料 二、工程概况 七里河站为兰州市城市轨道交通1 号线一期工程中间车站,位于七里河
图2.1-1 七里河车站平面位置图 七里河站起点里程为YCK20+557.603,终点里程为YCK20+808.103,有效站台中心里程YCK20+727.803。采用地下两层双柱三跨(部分区段为三柱四跨),的结构形式,车站主体净长为230.5m,标准段净宽为20.8m,总高13.17m,为岛式车站。车站底板埋置深约18.07m,结构顶板覆土深度约3.2m。车站在西津东路南北两侧各设两个出入口,其中一号出入口为远期规划,不在本次施工范围。车站两端于南北侧各设置1 组风亭。车站采用明挖顺做法施工,根据总体筹划,车站按照盾构过站考虑。 车站主体围护结构采用Φ800mm@1400mm钻孔桩,桩间采用挂网喷射混凝土挡土,同时根据地质条件选定在布置降水井进行基坑内外的降水。支撑结构自上而下设一道1000*1000钢筋混凝土结构支撑,2道Φ609、壁厚16mm 的钢管支撑。附属围护结构采用钻孔灌注桩加内支撑的支护形式,桩间采用挂网喷射混凝土(有淤泥层时,局部桩间采用旋喷桩加固)挡土,同时采用降水井降水。 三、龙门吊基础设计 3.1 龙门吊布置 七里河站共设置两台龙门吊,位于基坑北侧,跨度20.4 m,额定提升重量
某火炮减速器刚柔耦合动力学仿真 王炎,马吉胜 (军械工程学院 武器系统仿真研究所, 河北 石家庄 050003) 摘要:通过CATIA 与LMS https://www.doczj.com/doc/9913345897.html,b Motion 无缝接口实现了实体模型的数据导入。以多刚体动力学和柔性多体动力学理论为基础,建立了包含柔性轴和柔性箱体的方向机刚柔耦合虚拟样机模型。通过仿真分析了柔性体对齿轮啮合力的影响,得到了耦合作用下箱体及齿轮轴的应力和变形,为耦合动载工况下的减速器设计提供了理论依据。 关键词:啮合力;刚柔耦合;模态综合法;https://www.doczj.com/doc/9913345897.html,b Motion. 引言: 减速器是在原动机和工作机之间用于降低速度、增大扭矩的传动装置,其主要部件包括齿轮、轴、轴承和箱体等。减速器输出端啮合力往往很大,当箱体、轴材料刚度较小时,箱体、轴的柔性变形与输出齿轮啮合力的耦合作用不可忽略。某火炮方向减速器如图1所示,齿圈1固定不动,输出端齿轮2与齿圈1啮合带动整个减速器及炮塔绕齿圈1转动。输出端齿轮2采用悬臂梁结构,如果箱体和齿轮轴变形过大则使啮合振动更加恶劣,不能保证传动精度。在设计过程中为减轻减速器重量,欲将箱体由40CrNiMoA 改为ZL205。为探讨采用轻质箱体后,箱体、轴的柔性变形是否会使啮合振动显著增大,本文以柔性多体动力学理论为基础,综合考虑箱体、轴的变形与啮合力的耦合作用,建立了该减速器刚柔耦合动力学模型,通过分析耦合作用下载荷特性,以及箱体、轴动载下的应力和变形验证了减重设计方案的可行性,为箱体和轴等部件的选材及强度校核提供了理论依据。 图1 某火炮方向减速传动示意图 图2 齿轮扭转振动模型 1 啮合力模型 在减速器的虚拟样机建模过程中,难点在于啮合力模型的建立,在多体软件中,啮合力建模主要由以下两种模型: 1、基于齿轮参数的啮合力模型[1,2]。 该方法以齿轮系统动力学为基础,根据齿轮系统动力学中的运动方程,建立齿轮系统扭转振动模型如图2所示。根据牛顿定律可得这一系统的动力学模型: (())()(())p p p m p p g g p p p g g p I R C R R e t R K t f R R e t T θθθθθ????? +??+??= (1) (())()(())g g g m p p g g g p p g g g I R C R R e t R K t f R R e t T θθθθθ????? ??????=? (2) ()(())(())p p g g m p p g g F K t f R R e t C R R e t θθθθ??? =??+??啮合力 (3) 式中:,p g I I 为主、被动轮的转动惯量;,p g θθ为主,被动轮的扭转振动位移;,p g R R 为主、被动轮的基圆半径;()K t 为时变啮合刚度;,p g T T 为作用在主,被动轮上的外力矩;()e t 为齿轮传动误
龙门吊轨道基础验算 初步设计:龙门吊轨道基础截面尺寸暂定高*宽=0.4*0.6,纵向上下各布置3根Φ16通长钢筋,箍筋选用φ10钢筋间距25cm布置,选用C20砼 1、荷载计算, 荷载取80t龙门吊提一片16m空心板移动时的的荷载 空心板混凝土取a=9m3 空心板钢筋d=1.4t 80T龙门吊自重取b=30t 混凝土容重r=26KN/m3 安全系数取1.2,动荷载系数取1.4 集中荷载F=1.2*1.4(a*r+b*10+d*10)=1.2*1.4(9*26+30*10+1.4*10)=920.64KN 龙门吊轮距为L=6.6m,计算轮压为F1=920.64/4=230.16KN 均布荷载为钢轨和砼基础自身重量,取1m基础计算 其对应地基承载力P0=(0.1*10+0.6*0.4*26)*1.2=7.24KPa 我们采用“弹性地基梁计算程序2.0”计算基底反力和弯矩,忽略钢轨对荷载分布的影响,在龙门吊轮子处简化为集中荷载230.16KN “弹性地基梁计算程序2.0”界面图
地基压缩模量Es取35MPa,地基抗剪强度指标CK取40 当龙门吊运行到轨道末端时,取10m轨道基础计算,计算结果:
此时基底最大反力为端头处144.9KN,其所受压强P1=144.9/(0.6*1.1)=219.5KPa 此处填方为宕渣填筑,承载力取300KPa>P0+P1 此时为基础顶面受拉,最大弯矩为228.4 抗拉钢筋配筋计算公式为As=M/(0.9H0*fy) As——钢筋截面积 M ——截面弯矩 H0——有效高度 Fy——二级钢筋抗拉强度取335MPa 一级钢筋抗拉强度为235 MPa 代入计算得As=228.4/(0.9*0.37*335*1000)=0.002047㎡=2047mm2 考虑到基础顶面布置有截面积为1493mm2的钢轨,我们在顶面布置3根Φ16钢筋 当龙门吊运行在正常区间内时,取16.6m基础进行计算,计算结果为:
本文主要介绍使用SolidWorks、HyperMesh、ANSYS和ADAMS软件进行刚柔耦合动力学分析的主要步骤。 一、几何建模 在SolidWorks中建立几何模型,将模型调整到合适的姿态,保存。此模型的姿态不要改动,否则以后的MNF文件导入到ADAMS中装配起来麻烦。 二、ADAMS动力学仿真分析 将模型导入到ADAMS中进行动力学仿真分析。 为了方便三维模型的建立,SolidWorks中是将每个零件单独进行建模然后在装配模块中进行装配。这一特点导致三维模型导入到ADAMS软件后,每一个零件都是一个独立的part,由于工作装置三维模型比较复杂,因此part数目也就相应的比较多,这样就对仿真分析的进行产生不利影响。下面总结一下从三维建模软件SolidWorks导入到ADAMS中进行机构动力学仿真的要点。(1)首先在SolidWorks中得到装配体。(2)分析该装配体中,到底有几个构件。(3)分别隐藏其他构件而只保留一个构件,并把该构件导出为*.x_t 格式文件。(4)在ADAMS中依次导入各个*.x_t 文件,并注意是用part的形式导入的。(5)对各个构件重命名,并给定颜色,设置其质量属性。(6)对于产生相对运动的地方,建议先在此处创建一个marker,以方便后面的操作。否则,三维模型进入ADAMS后,线条繁多,在创建运动副的时候很难找到对应的点。 部件的导入如下图1所示: 图1 文件输入 File Type选择Parasolid; File To Read 找到相应的模型; 将Model Name 切换到Part Name,然后在输入框中右击,一次单击part →create 然后在弹出的新窗口中设置相应的Part Name,然后单击OK →OK 。将一个部件导入,重复以上步骤将部件依次导入。这里输入的技巧是将部件名称按顺序排列,如zpt_1、zpt_2、zpt_3. ,然后在图1中只需将zpt_1改为zpt_2、将PART_1改为PART_2即可。
龙门吊轨道基础计算书 1.编制依据 (1)《基础工程》(人民交通出版社); (2)《吊车轨道的连接标准》(GB253); (3)《机械设备安装工程施工及验收通用规范》(GB50231-98); (4)《建筑地基基础设计规范》(GB50007-2002); (5)《公路钢筋混凝土及预应力混凝土桥涵设计规范》(JTG D62-2004); (6)《公路工程施工安全技术规范》(JTG F90-2015); 2.工程概况 本项目为江苏省江都至广陵高速公路改扩建工程路基桥涵施工项目JG-JD-2标段,起自大桥互通,终于扬泰交界处,起讫点桩号为K980+400~K992+533.927,全长12.134km,途经大桥、浦头两镇。 本工程为既有高速“四改八”项目,目前路基宽度为26m,改扩建采用两侧各拼宽8m,路基宽42m。 本标段先张法空心板梁共428片,其中13m板梁16片,16m板梁400片,20m 板梁12片。后张法25mT梁24片,后张法30m箱梁64片(单片重93t)。 考虑施工场地、施工条件及预制梁总量,先张法空心板梁和后张法预制梁均采用外购成品梁;空心板梁梁场存梁能力满足施工要求,后张法预制梁梁场受施工场地限制,存梁能力较小;综上考虑,在X203跨线桥16#台尾附近设置存梁台座,存梁能力36片。 存梁区域龙门吊轨道基础长200m,龙门吊轨道基础中心间距16m,龙门吊轨道基础采用“凸型”钢筋混凝土结构;存梁区域共设有3个存梁台座,存梁台座可存梁36片(双层存梁)。 存梁区域投入2台60t龙门吊,跨度16m,龙门吊主承重梁采用桁架结构,长25m,支腿高度9m。单台龙门吊自重为27t。 3.设计说明 龙门吊走行轨道基础采用钢筋混凝土条形基础,采用倒T形截面,混凝土强度等级为C30。龙门吊走行轨道采用龙门吊厂家设计要求采用的起重钢轨型号,基础设计中不考虑轨道与基础共同受力作用,忽略钢轨承载能力。基础按弹性地基梁进行分析设计。
龙门吊基础设计计算书 1、设计依据 《基础工程》(第二版),清华大学出版社; 《建筑地基基础设计规范》(GB50007-2011); 龙门吊生产厂家提供有关资料; 《混凝土结构设计规范》(GB50010-2010); 《建筑施工计算手册》。 2、工程概况 翠柏里站为8.1m侧式站台地下二层岛式车站,车站站台中心里程为 SK16+399.784,为三柱四跨钢筋混凝土箱型结构,车站基坑宽24.3~25.3m,长约223m,站台中心里程处顶板覆土约1.5m,南北端头井基坑深分别为17.97m、 18.42m。翠柏里站前后区间采用类矩形盾构施工,两端均为盾构始发。车站主体结构上方加建二~三层商业开发用房,利用车站的框架柱及桩作为基础。 为确保施工进度与安全质量按时按标完成,我项目部拟配置2台MH10/10t-28.1m电动葫芦门式起重机,起重机满载总重150t,均匀分布在8个轮上,理论计算轮压: 8/= = = * 150 8/8.9 mg kN f7. 183 为确保安全起见,将轮压设计值提高到320kN进行设计。西侧基础梁拟采用1200mm*800mm的主体围护顶圈梁作为基础梁,长度根据现场实际情况施工,东侧基础梁拟采用500mm*1500mm的地下连续墙的导墙作为轨道梁基础,总长超过 223m,混凝土强度等级为C30。基础设计中不考虑轨道与基础的共同受力作用,忽略钢轨承载能力不计,按半无限弹性地基梁进行设计。
图1 基础梁 受力简图 3、西侧轨道梁梁的截面特性 西侧轨道梁混凝土梁采用C35混凝土,抗压强度35MPa。如图所示,轴线至梁底距离: 4.0 1y= m y4.0 = m 2 图2 基础梁截面简图 梁的截面惯性矩: I=b*h3/12=0.051m3 梁的截面抵抗矩:
目录 1.曲柄-滑块机构 (1) 1.1配置ANSYS工作环境 (3) 1.2准备连杆柔性体模型 (4) 1.2.1在ANSYS里的工作 (4) 1.2.2柔性子系统向导 (6) 1.3刚柔耦合系统动力学建模 (12) 1.3.1创建几何图形 (13) 1.3.2创建刚体 (15) 1.3.3创建柔性子系统 (16) 1.3.4创建铰 (17) 1.4刚柔耦合系统动力学仿真 (20) 2.柔性平台-电机模型 (26) 2.1准备柔性平台 (27) 2.1.1在ANSYS环境里工作 (28) 2.1.2在ANSYS Workbench环境里工作 (29) 2.1.3柔性子系统向导 (36) 2.2刚柔耦合系统动力学建模与仿真 (37) 2.2.1导入柔性平台 (37) 2.2.2连接柔性平台与大地 (38) 2.2.3创建几何图形 (38) 2.2.4创建力元 (42) 2.2.5导入电机子系统 (45) 2.2.6设置电机转子速度曲线 (47) 2.2.7连接电机与柔性平台 (49) 2.2.8计算系统平衡位置和固有频率 (51) 2.2.9运动仿真 (53)
1.曲柄-滑块机构 本例模型为一个曲柄-滑块机构,如图 1.1所示。在{UM Data}\SAMPLES\ Flex目录有一个名为slider_crank_all的模型。这个模型里共有三个曲柄-滑块机构,其不同之处在于构件连杆的建模方式: ?连杆为一个刚体; ?连杆为一个子系统,由11个刚体通过铰和力元连接而成; ?连杆为一个柔性体,从有限元软件导入。 图1.1 曲柄-滑块机构:1-机架,2-曲柄,3-连杆,4-滑块 这里主要介绍第三个模型——刚柔耦合机构的建模流程: 1.建立连杆的有限元模型; 2.计算所需的模态,并转换保存为UM格式; 3.创建几何图形; 4.创建刚体(曲柄和滑块); 5.导入连杆弹性体; 6.创建铰和力元。 前两步在ANSYS里进行,后面四步在UM软件里进行。 备注:UM使用子系统技术处理外部导入的柔性体,每个柔性体都是一个独立的子系统,导入时选择Linear FEM Subsystem类型。 我们可以先创建一个工作目录,方便后续模型使用,如:{UM Data}\My Models,或者D:\models。 以下以“.\”来表示工作目录。在这个目录下我们再创建两个子文件夹:?flexbeam:存放柔性体数据; ?slider_crank_fem,存放刚柔耦合模型。
一基本情况 40T龙门吊的跨度为11.4m,根据现场需要设置于出土孔处,龙门吊基础柱为800X800钢筋砼基础,两端支座设置于围护桩冠梁上,中间两支座设置于主体结构纵梁上。龙门吊走行梁为800x1400砼梁,梁顶与地面平齐。计算示意图如下。 图1 40T龙门吊基础梁计算简图 3.2龙门吊参数: 表2 龙门吊参数 3.4龙门吊工况 40t龙门吊达到最大起重量、小车行至极限位置(小车满载停在支腿一侧的悬臂端处),且当两架龙门吊位于主体结构G-F轴中部时,基础柱承受轴力最大;基础梁最大弯矩通过时程分析,取最大弯矩验算。 3.5走行梁荷载计算 1、走行梁竖向荷载 查40t龙门吊图纸得知,龙门吊的大车最大轮压为330KN,龙门吊一侧轮距8.5m,每侧两肢共4个轮,计算竖向荷载标准值为660KN。 考虑荷载分项系数,取1.4 考虑吊车竖向荷载动力系数,按工作级别为A6~A8 软钩吊车取1.10 2、走行梁横向水平荷载 吊车横向水平荷载标准值,取横行小车重量及额定起重量之和的百分比,本吊车
额定起重为40T, 吊车横向水平荷载标准值百分数为10% 龙门吊四肢每肢横向水平荷载标准值为: Tk=0.5*0.5×(Q+g1)g×10%=0.5*0.5*(40+23.1)*10*0.1=15.8KN 3、走行梁纵向水平荷载设计值 (制动力引起的纵向水平荷载计算此处略) 4、走行梁其他荷载设计值 钢板、轨枕、钢轨等重量按每米60kg计算(走行梁自重不考虑,因为装配式贝雷梁桥容许荷载已考虑自重)。 3.6走行梁内力计算 1、走行梁竖向内力计算 1 计算简图: 2 计算条件: 荷载条件: 均布恒载 : 0.00kN/m 均布活载 : 0.00 梁容重 : 25.00kN/m3计算时考虑梁自重: 考虑 恒载分项系数: 1.20 活载分项系数 : 1.40 移动荷载: 移动荷载数目 :1 机械1-集中力F(kN):660 660 机械1-间距(m) :8.5 梁左移动限制 : 否梁左移动限制距离: ---- 梁左移动限制 : 否梁左移动限制距离: ---- 单元划分长度 : 0.200m 机械最小移动步长: 0.200m 机械间最小间距 : --- 机械荷载分项系数: 1.540 3 内力简图: 2、走行梁水平内力计算 1 计算简图: 2 计算条件: 荷载条件: 均布恒载 : 0.00kN/m 均布活载 : 0.00 梁容重 : 25.00kN/m3计算时考虑梁自重: 不考虑 恒载分项系数: 1.20 活载分项系数 : 1.40 移动荷载: 移动荷载数目 :1 机械1-集中力F(kN):15.8 15.8 机械1-间距(m) :8.5 梁左移动限制 : 否梁左移动限制距离: ---- 梁左移动限制 : 否梁左移动限制距离: ----
佳~管区间盾构场地龙门吊基础设计计算书 1、设计依据 《基础工程》(第二版),清华大学出版社; 《建筑地基基础设计规范》(GB50007-2011); 龙门吊生产厂家提供有关资料; 《混凝土结构设计规范》(GB50010-2010); 《建筑施工计算手册》。 2、工程概况 佳海工业园明挖段为佳~管区间盾构始发场地,拟配置2台MGtz 型45t-19.2m门式起重机,起重机满载总重150t,均匀分布在8个轮上,理论计算轮压: 150 8/= = = * f7. kN mg 183 8/8.9 为确保安全起见,将轮压设计值提高到320kN进行设计。基础梁拟采用顶面500mm*底面1000mm梯形截面钢筋混凝土条形基础梁,高度500mm,长度根据现场实际情况施工,总长超过100m,轨道梁设置在场地路基上,混凝土强度等级为C30。基础设计中不考虑轨道与基础的共同受力作用,忽略钢轨承载能力不计,按半无限弹性地基梁进行设计。
图1 基础梁受力简图 3、梁的截面特性 混凝土梁采用C30混凝土,抗压强度30MPa 。设计采用条形基础,如图所示,轴线至梁底距离: m hc bd c b d cH y 207.0) 5.0*3.02.0*1(*2)5.01(*2.05.0*5.0)(2)(22221=+-+=+-+= m y H y 293.0207.05.012=-=-= 图2 基础梁截面简图
梁的截面惯性矩: 43131320215.0]))(([3 1m d y c b by cy I =---+= 梁的截面抵抗矩: 310734.0207 .05.00215 .0m y H I W =-=-= 混凝土的弹性模量: 27/10*55.2m kN E c = 截面刚度: 25710*47.510*55.2*0215.0kNm I E c == 4、按反梁法计算地基的净反力和基础梁的截面弯矩 假定基底反力均匀分布,如图所示,每米长度基底反力值为: m kN L F p /72.9379 .52*934.3320 *4=+= =∑ 若根据脚架荷载和基底均布反力,按静定梁计算截面弯矩,则结果表明梁不受脚架端约束可以自有挠曲的情况。 图3 基础梁受力简图
沭阳县新沂河大桥拓宽改造工程梁场预制梁台座基础、龙门吊基础承载力验算书 梁场预制台座基础、龙门轨道基础地基承载力验算书经计算所得33.05mT梁、33.05m箱梁自重最大,只要验算33.05mT 梁、33.5m箱梁即可。 33.05mT梁制梁台座基础承载力验算 箱梁梁场制梁台采用C30钢筋混凝土台座,台边预埋6#槽钢,防止台座棱角在施工过程中发生掉角现象,台座表面铺设厚度为8mm钢板做为预制梁底模、施工时边棱角钢与台座钢筋焊接固定,台面钢板与边棱角钢焊接,台座厚度为30cm台座宽度两端60cm标准52cm,台座两端由于预应力张拉后受力较大,为满足支承能力所以在台座两端4m范围内加深处理厚度为30cm。预应力张拉台须满足强度和刚度,台座及台座端头15cm×15cm的Φ12钢筋网片。 台座结构见附图。 制梁台座相关计算如下: (1)荷载计算 按构件最大重量计算根据设计图纸最大构件为边跨边梁砼数量为:25.22m3,构件自重:25.22m3×26kN/m3=655.72KN (2)台座砼强度计算 根据台座受力情况 台座可按竖向压力作用下受压构件计算 计算如下: 台座顶面积:A=[0.6×1.2+(0.6+0.52)×3.1×0.5]×2+24.7×0.52 =17.756m2 台面砼强度为:σ=655.72KN÷17.756m2=77.81KPa
台座砼设计为C30砼,其允许抗压强度为:[σ]=30MPa,σ<[σ]台座强度合格。 (3)台座下地基承载力计算 台座地基承受梁体砼自重和台座砼自重荷载为: q2=q1+(17.756×0.3+3.1×4.0×0.4×2+25.8×1.2×0.2) ×26KN/m3 =1213.13KN 计算地基承载力为:σ地=q2÷(3.1×4.0×2+25.8×1.2)=21.76KPa 要求台座下地基承载力不小于150Kpa,故满足要求。 (4)台座两端砼强度和地基承载力计算 根据现场实际施工情况,因梁体张拉后梁体会起反拱,主要是台座两端受力最为不利,根据台座两端台座尺寸计算台座砼的强度和地 基承载力计算如下: ○1座两端砼强度台座两端各取4m计算,宽度为3.10m,受力面积A=4×3.1×2=24.8m2 台座两端砼强度计算: σ砼=655.72KN÷24.8m2=26.44KPa 台座砼设计为C30砼,其允许抗压强度为:[σ]=30MPa,σ砼<[σ]台座两端砼强度合格。 ②台座两端地基承载力 台座两端地基承载面积:A=4×3.1×2=24.8m2 梁体自重+台座自重:Q=655.72+0.3m×4m×3.1m×26KN/m3×2 =849.16KN 计算地基承载力为: 849.16KN÷24.8m2=34.24KPa
刚柔耦合分析详细流程 主要内容: 1)零件重新网格划分; 2)材料和属性的设置; 3)刚体的替代; 4)Rigid Spider的建立; 5)柔性体Craig-Bampton模态计算; 以satellite为例,刚体模型建立完毕,进行计算,保存为satellite.CATAnalysis。 ●将需设置成柔性体的零件在新窗口打开,此时默认进入几何设计模块(Geometry)。 ●进入网格划分模块:开始->Meshing->CAD meshing模块,对零件进行网格划分。一般先 进行surface mesh(点击Advanced surface mesher,选择零件),然后进行3D网格划分(点击Tetrahedron,选择面网格),采用四面体进行填充。此时,必须将Surface网格Deactivate(在特征树中选择Advanced Surface mesh,右键单击,选择Deactivate),因为分析中用不到2D网格,激活的2D网格由于缺少材料属性会使模态计算失败,切勿忘记。
进入Structure->Finite Element Analysis Pre/Post->Materials&Properties,进行零件材料和网格属性的设置:新建一个Isotropic Material,设置杨氏模量、泊松比和密度等基本参数;新建一个Solid Property,Application Region选择该3D网格(可在特征树中选择Tetrahedron Filler Mesh),Material选择刚才建立的Isotropic Material。
●保存该分析为Flex.CATAnalysis。 ●不要关闭Flex.CATAnalysis(最小化即可),进入satellite.CATAnalysis分析文件,用上面柔 性体分析文件替换刚体:选择要被替换的刚体,右键单击,选择:显示->Flex->Make Flexible with Existing Data,在弹出的对话框中选择Flex.CATAnalysis文件,此时该刚体被
基于刚柔耦合模型对动力学的分析 【摘要】本文基于国内某高速列车,分别建立其多刚体和刚柔耦合动力学模型,通过计算两种模型的动力学指标,分析车体弹性振动对车辆系统动力学的影响。 【关键词】高速列车;刚柔耦合模型;车辆系统动力学 1 前言 当今高速列车发展主要围绕高速化和轻量化这两大主题展开。由此引发的问题也伴随而来:一方面,当列车行驶速度升高时,轨道的激扰频率会随之升高,而另一方面车体逐步轻量化也导致车辆结构本身刚度的下降,因此减低了车辆结构本身的自振频率,更容易在高频激扰下发生共振,从而恶化高速列车的动力学性能。但传统的车辆动力学分析中,将车辆系统考虑成多刚体,无法考察高速列车部件结构振动对动力学性能的影响。本文基于国内某高速列车分别建立多刚体和刚柔耦合动力学模型,计算分析车体弹性振动对车辆系统动力学的影响。 2 模型建立 轨道车辆实际是一个复杂的弹性多自由度振动系统,通过仿真的方法完整描述出动力学特性是不可能的,因此在对其进行动力学分析时,需要建立一个相对简化的多体动力学模型。本文以某高速列车为研究对象,分别建立其多刚体和车体为弹性体的刚柔耦合系统模型。 3 动力学指标对比分析 本文中利用国家针对车辆系统动力学性能评定的相关标准及规定,在SIMPACK中对所建的两种车辆系统模型的各项动力学性能指标进行计算分析,总结两者之间的差异。 3.1 运行稳定性指标对比分析 图1 580km/h、581km/h时多刚体模型各轮对横向位移 通过图1可以发现,多刚体模型中当车辆运行速度为580km/h时,当车辆系统通过一段有激扰的轨道谱后,各轮对的横向位移量很快衰减,而当车辆以581km/h的速度运行时,通过有激扰路段后,各位轮对的横向位移量出现等幅振荡现象,则多刚体车辆系统模型在580km/h达到临界速度。 图2 534km/h、535km/h时刚柔耦合各轮对横向位移 通过图2发现刚柔耦合车辆系统模型在534km/h时达到临界速度。通过以上