看门狗应用
看门狗:
看门狗是单片机的一种超时复位机制。实际上看门狗是一个硬件的计时器,在到达一定的时间后令单片机复位,即程序从头开始重新运行。在很多种单片机中都有看门狗,除了STC89系列单片机,还有凌阳等。
看门狗的功能:
在工业应用中由于一些意外的原因,如电磁干扰、内部硬件错误等,造成单片机死机或陷入死循环中,这样可能会出现很严重的后果,这就需要一种自我检测复位的功能。在对看门狗进行设置之后,它便开始计时。在程序运行的过程中对计时器的值定时清零,这就是通常所说的“喂狗”。如果程序运行正常,则看门狗由于可以及时得以清零,所以不会出溢出。但是如果程序停滞或进行死循环,就使得看门狗不能清零(看门狗是硬件实现的,与程序的运行是无关的),从而在到达设定的时间后产生溢出,使单片机复位。
STC89系列单片机看门狗的应用:
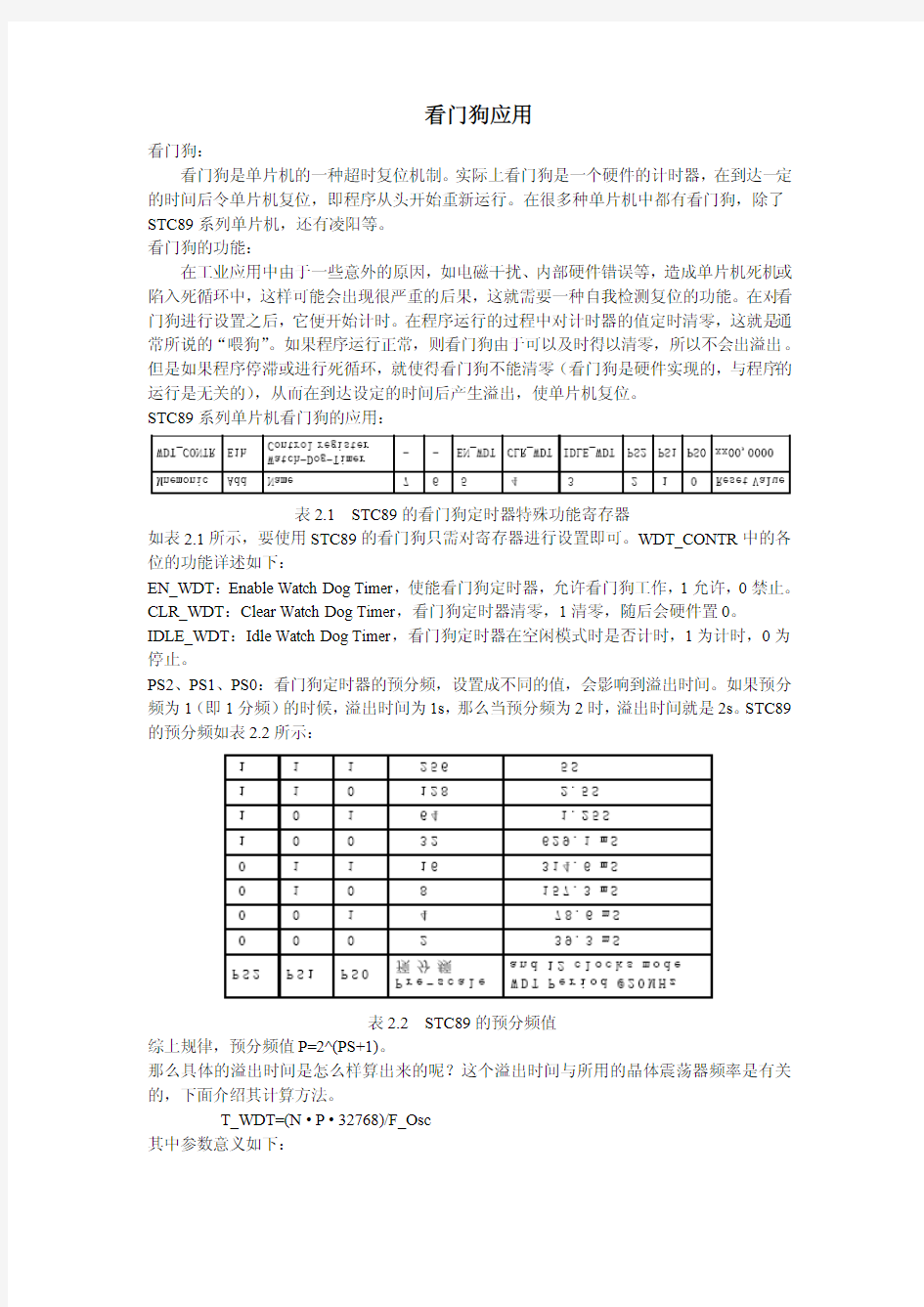
表2.1STC89的看门狗定时器特殊功能寄存器
如表2.1所示,要使用STC89的看门狗只需对寄存器进行设置即可。WDT_CONTR中的各位的功能详述如下:
EN_WDT:Enable Watch Dog Timer,使能看门狗定时器,允许看门狗工作,1允许,0禁止。CLR_WDT:Clear Watch Dog Timer,看门狗定时器清零,1清零,随后会硬件置0。
IDLE_WDT:Idle Watch Dog Timer,看门狗定时器在空闲模式时是否计时,1为计时,0为停止。
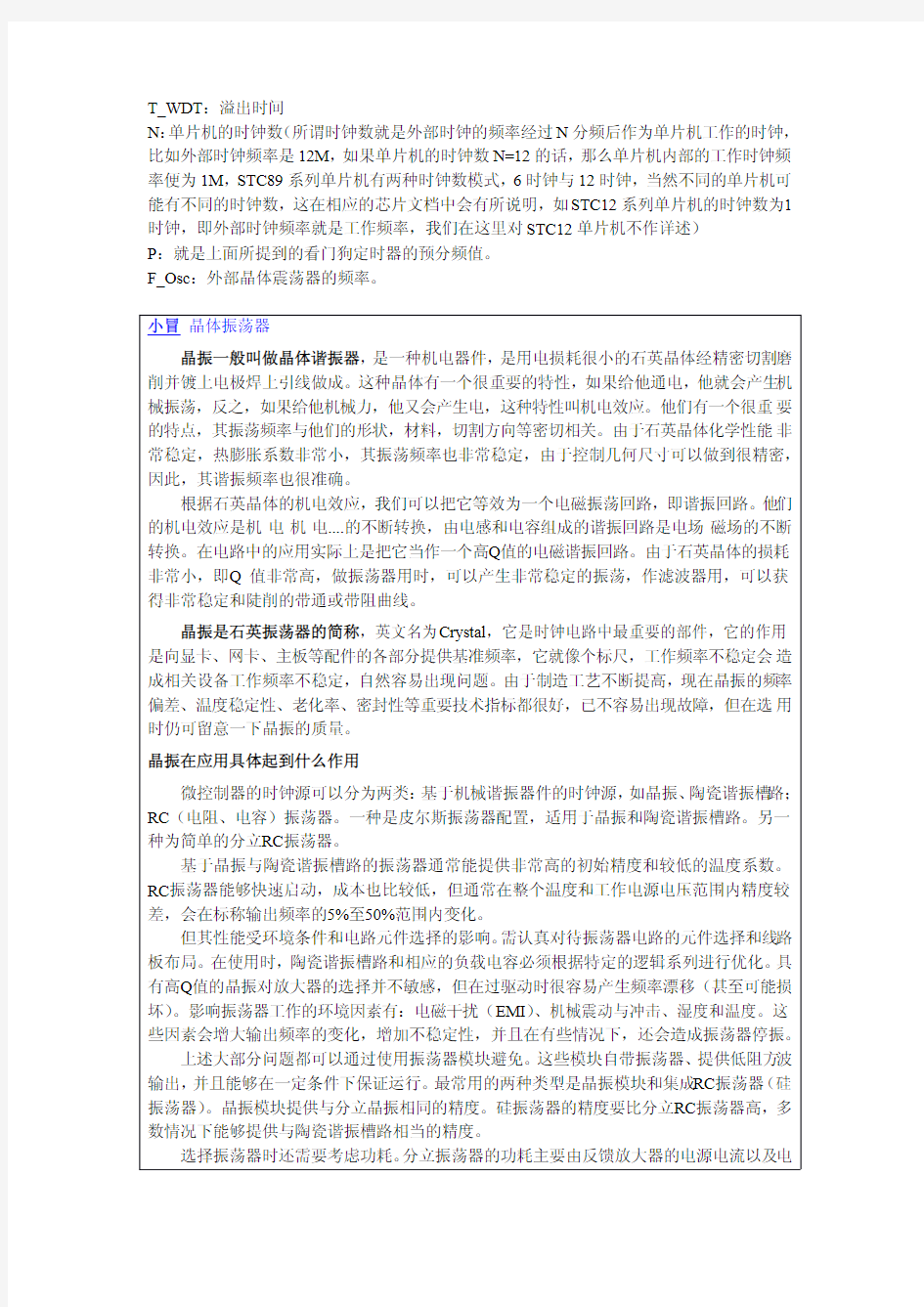
PS2、PS1、PS0:看门狗定时器的预分频,设置成不同的值,会影响到溢出时间。如果预分频为1(即1分频)的时候,溢出时间为1s,那么当预分频为2时,溢出时间就是2s。STC89的预分频如表2.2所示:
表2.2STC89的预分频值
综上规律,预分频值P=2^(PS+1)。
那么具体的溢出时间是怎么样算出来的呢?这个溢出时间与所用的晶体震荡器频率是有关的,下面介绍其计算方法。
T_WDT=(N?P?32768)/F_Osc
其中参数意义如下:
T_WDT:溢出时间
N:单片机的时钟数(所谓时钟数就是外部时钟的频率经过N分频后作为单片机工作的时钟,比如外部时钟频率是12M,如果单片机的时钟数N=12的话,那么单片机内部的工作时钟频率便为1M,STC89系列单片机有两种时钟数模式,6时钟与12时钟,当然不同的单片机可能有不同的时钟数,这在相应的芯片文档中会有所说明,如STC12系列单片机的时钟数为1时钟,即外部时钟频率就是工作频率,我们在这里对STC12单片机不作详述)
P:就是上面所提到的看门狗定时器的预分频值。
F_Osc:外部晶体震荡器的频率。
小冒晶体振荡器
晶振一般叫做晶体谐振器,是一种机电器件,是用电损耗很小的石英晶体经精密切割磨削并镀上电极焊上引线做成。这种晶体有一个很重要的特性,如果给他通电,他就会产生机械振荡,反之,如果给他机械力,他又会产生电,这种特性叫机电效应。他们有一个很重要的特点,其振荡频率与他们的形状,材料,切割方向等密切相关。由于石英晶体化学性能非常稳定,热膨胀系数非常小,其振荡频率也非常稳定,由于控制几何尺寸可以做到很精密,因此,其谐振频率也很准确。
根据石英晶体的机电效应,我们可以把它等效为一个电磁振荡回路,即谐振回路。他们的机电效应是机-电-机-电....的不断转换,由电感和电容组成的谐振回路是电场-磁场的不断转换。在电路中的应用实际上是把它当作一个高Q值的电磁谐振回路。由于石英晶体的损耗非常小,即Q值非常高,做振荡器用时,可以产生非常稳定的振荡,作滤波器用,可以获得非常稳定和陡削的带通或带阻曲线。
晶振是石英振荡器的简称,英文名为Crystal,它是时钟电路中最重要的部件,它的作用是向显卡、网卡、主板等配件的各部分提供基准频率,它就像个标尺,工作频率不稳定会造成相关设备工作频率不稳定,自然容易出现问题。由于制造工艺不断提高,现在晶振的频率偏差、温度稳定性、老化率、密封性等重要技术指标都很好,已不容易出现故障,但在选用时仍可留意一下晶振的质量。
晶振在应用具体起到什么作用
微控制器的时钟源可以分为两类:基于机械谐振器件的时钟源,如晶振、陶瓷谐振槽路;RC(电阻、电容)振荡器。一种是皮尔斯振荡器配置,适用于晶振和陶瓷谐振槽路。另一种为简单的分立RC振荡器。
基于晶振与陶瓷谐振槽路的振荡器通常能提供非常高的初始精度和较低的温度系数。RC振荡器能够快速启动,成本也比较低,但通常在整个温度和工作电源电压范围内精度较差,会在标称输出频率的5%至50%范围内变化。
但其性能受环境条件和电路元件选择的影响。需认真对待振荡器电路的元件选择和线路板布局。在使用时,陶瓷谐振槽路和相应的负载电容必须根据特定的逻辑系列进行优化。具有高Q值的晶振对放大器的选择并不敏感,但在过驱动时很容易产生频率漂移(甚至可能损坏)。影响振荡器工作的环境因素有:电磁干扰(EMI)、机械震动与冲击、湿度和温度。这些因素会增大输出频率的变化,增加不稳定性,并且在有些情况下,还会造成振荡器停振。
上述大部分问题都可以通过使用振荡器模块避免。这些模块自带振荡器、提供低阻方波输出,并且能够在一定条件下保证运行。最常用的两种类型是晶振模块和集成RC振荡器(硅振荡器)。晶振模块提供与分立晶振相同的精度。硅振荡器的精度要比分立RC振荡器高,多数情况下能够提供与陶瓷谐振槽路相当的精度。
选择振荡器时还需要考虑功耗。分立振荡器的功耗主要由反馈放大器的电源电流以及电
路内部的电容值所决定。CMOS放大器功耗与工作频率成正比,可以表示为功率耗散电容值。比如,HC04反相器门电路的功率耗散电容值是90pF。在4MHz、5V电源下工作时,相当于1.8mA的电源电流。再加上20pF的晶振负载电容,整个电源电流为2.2mA。陶瓷谐振槽路一般具有较大的负载电容,相应地也需要更多的电流。相比之下,晶振模块一般需要电源电流为10mA~60mA。硅振荡器的电源电流取决于其类型与功能,范围可以从低频(固定)器件的几个微安到可编程器件的几个毫安。一种低功率的硅振荡器,如MAX7375,工作在4MHz 时只需不到2mA的电流。
在特定的应用场合优化时钟源需要综合考虑以下一些因素:精度、成本、功耗以及环境需求
!注意:单片机的工作频率起决于振荡器的频率,但并不表明单纯提高振荡的频率就可以提高其处理速度。单片机是有最高工作频率的,在这个频率下可以正常工作,但超出了这个频率范围,将会使得信号完整性与串扰方面出现问题,导致单片机不能工作。同时频率较高的震荡器也会带来功耗方面的问题。
我的话:晶体震荡器自身可以产生很好的正弦波,但幅值小,要将其作为单片机的时钟需要对你自己放大增益,STC单片机对时钟的增益也是可以设置的(full gain与1/2gain),单片机工作在比较高的频率下的时候,可以采用1/2gain,降低功耗。
如上表中N=12,P=2,F_Osc=20M依此公式T_WDT=(12X2X32768)/20000000=0.0393s 即单片机0.0393秒内没有“喂狗”就会自己复位。
外部晶振频率的不同导致看门狗溢出时间不同,如表2.3与表2.4
表2.312M晶振,12时钟模式下的分频值表
表2.411.0592M晶振,12时钟模式下的分频值表
电子世界2004年1 期 26??单片机与可编程器件 “看门狗”芯片的选择 及软件控制 ?吉林化工学院自动化系 梁 伟 ?
电子世界2004年1期 27??单片机与可编程器件 个问题的方法就是做一个看门狗清除脉冲子程序,在延时等循环的圈内中加入它,可以保证万无一失。 2. 使用其它软件方法配合看门狗除了保证对看门狗的合理控制外,还要考虑使用其它软件方法配合看门狗,才能够保证MCU可靠运行。许多书籍在分析MCU失控后的情况时,几乎都假定一般是PC错位,进入未知区域,并不再进入正常程序代码段。但实际并非如此,以下就两种情况做具体分析,并给出解决方法。(1)干扰造成PC出错,但出错后进入了正常代码段,并在错误的情况下继续运行,看门狗没有起作用,但系统实际上已经瘫痪。解决这个问题可以使用软件路标法,几乎所有软件的主程序都是在一个大循环里工作,可以在循环中设置一些断点,断点处设置路标,程序运行 时随时检查路标,这样就可以判断程序是否有非法进入的可能。具体的路标可以是一个计数器,每个断点加1,在终点清除。因为断点数固定,因此每个断点处路标值固定,只需要检测路标值就可以进行对非法进入的判断。余下的问题就是发现错误后如何处理,正常的处理就是设置死循环,等待看门狗复位。对于PHILIPS的LPC系列MCU也可以置位AUXR1寄存器的SRST位立即进行软件复位。(2)干扰导致内部寄存器及RAM出错,但PC未错,因为错误的数据和标志导致程序在错误状态下运行。解决这种问题可以采用RAM校验的方法,具体是在MCU的内部RAM中开辟几个校验区,复位时写入固定代码,如55H或者AAH,并编制校验子程序,运行时随时调用校验,发现错误马上处理,处理方法同(1)。 考虑到可靠性,应该多设置几个校验区, 但要付出RAM资源代价,应酌情处理。此方法如果与(1)方法同时使用,则会获得更好的效果。 结束语 以上对看门狗的芯片选择和软件控制做了一些介绍,笔者通过合理运用,成功地设计出了许多应用系统,这些系统在恶劣的环境下都能够正常工作。但设计看门狗的初衷是防止系统万一死机的弥补措施,设计者本身是希望它永远也不要启动的。因此对于设计MCU系统,不应该过分依靠看门狗,而应该在电源及抗干扰措施上下足功夫,同时合理选择MCU芯片,尽可能选择那些抗干扰能力强,同时低EMI的品种。只有在各个环节都精心设计,才能够保证最终系统的可靠性。◆ Protel 99SE是基于Windows环境下的EDA电子辅助设计软件。一般来讲,利用Protel软件设计工程最基本的完整过程可以分为四大步骤:(1)查找资料,确定方案;(2)电路原理图的设计;(3)产生网络表;(4)印刷电路板的设计。 本文按照实际的设计流程顺序,来谈一谈如何使用Protel 99SE软件准确、高效地设计出电路原理图和设计印刷电路板的一些技巧。 电路原理图的设计 在电路原理图的设计过程中主要应 注意以下方面: 1.设置图纸 在设计开始之前首先要选择好图纸的大小,否则在打印时,若需将图纸由大号改为小号,而电路原理图不会跟着缩小,就存在部分原理图超出图纸范围打印不出来,从而返工的问题。通常的设计顺序为从左到右,从上到下。 2.放置元件 (1)利用元件库浏览器放置元件,对于元件库内未包括的元件要自己创建。创建的元件其引脚没有必要和实物一致, Protel 99SE 软件的实用技巧 ?上海海运学院商船学院轮机工程系 黄志坚 胡以怀? 可将功能相近或相同的引脚放到一起,以方便布线。(2)自创建元件时,还要注意,一定要在工作区的中央(0,0)处 (即“十”字形的中心) 绘制库元件,否则可能会出现在原理图中放置(place)制作的元件时,鼠标指针总是与要放置的元件相隔很远的现象。 (3) 在画原理图时,有时一不小心,使元件(或导线)掉到了图纸外面,却怎么也清除不了。这是由于Protel在原理图编辑状态下,不能同时用鼠标选中工作面内外的元件。要清除图纸外的元件,可点击 【Edit】/【Select】/【Outside Area】,然后框选整张图纸,再点击【Edit】/【Cut】即可。 元件放置好后,最好及时设置好其属性(Attributes),若找不到其相应的封装形式,也要及时为其创建适当的封装形式。 3.原理图布线 (1)根据设计目标进行布线。布线应该用原理图工具栏上的(Wiring Tools)工具,不要误用了(Drawing Tools)工具。(Wiring Tools)工具包含有电气特性,而(Drawing Tools)工具不具备电气特性,会导致原理图出错。 (2) 利用网络标号(Net Label)。网络标号表示一个电气连接点,具有相同网络标号的电气接线表明是连接在一起的。虽然网络标号主要用于层次式电路或多重式电路中各模块电路之间的连接,但若在同一张普通的原理图中也使用网络 标号,则可通过命名相同的网络标号使它们在电气上属于同一网络(即连接在一起),从而不用电气接线就实现了各引脚之间的互连,使原理图简洁明了,不易出错,不但简化了设计,还提高了设计速度。 4.编辑和调整编辑和调整是保证原理图设计成功很重要的一步。 (1)当电路较复杂、或是元器件的数目较多时,用手动编号的方法不仅慢,而且容易出现重号或跳号。重号的错误会在PCB编辑器中载入网络表时表现出来,跳号也会导致管理不便,所以Protel提供了很好的元件自动编号功能,应该好好地利用,即【Tools】/【Annotate...】。 (2)在原理图画好后,许多细节之处
TMS320F2812 Watchdog范例程序 FILE: Example_28xWatchdog.c // // TITLE: DSP28 Watchdog interrupt test program. // // ASSUMPTIONS: // // This program requires the DSP28 header files. To compile the // program as is, it should reside in the DSP28/examples/watchdog // sub-directory. // // As supplied, this project is configured for "boot to H0" operation. // // DESCRIPTION: // This program exercises the watchdog on the F2812/F2810 parts. // // First the watchdog is connected to the WAKEINT interrupt of the // PIE block. The code is then put into an infinite loop. // // The user can select to feed the watchdog key register or not // by commenting one line of code in the infinite loop. // // If the watchdog key register is fed by the KickDog function // then the WAKEINT interrupt is not taken. If the key register // is not fed by the KickDog function then WAKEINT will be taken. // // Watch Variables: // LoopCount for the number of times through the infinite loop // WakeCount for the number of times through WAKEINT // //########################################################################### // // Ver | dd mmm yyyy | Who | Description of changes // =====|=============|======|=============================================== // 0.57| 29 May 2002 | L.H. | Initial Release //########################################################################### // Step 0. Include required header files // DSP28_Device.h: device specific definitions #include statements for // all of the peripheral .h definition files. // DSP28_Example.h is specific for the given example. #include "DSP28_Device.h"
SPI接口应用之一---看门狗芯片X25045 hadao 发表于 2006-5-8 0:08:41 一、引脚定义及通信协议 SO:串行数据输出脚,在一个读操作的过程中,数据从SO脚移位输出。在时钟的下降沿时数据改变。 SI:串行数据输入脚,所有的操作码、字节地址和数据从SI脚写入,在时钟的上升沿时数据被锁定。 SCK:串行时钟,控制总线上数据输入和输出的时序。 /CS :芯片使能信号,当其为高电平时,芯片不被选择,SO脚为高阻态,除非一个内部的写操作正在进行,否则芯片处于待机模式;当引脚为低电平时,芯片处于活动模式,在上电后,在任何操作之前需要CS引脚的一个从高电平到低电平的跳变。 /WP:当WP引脚为低时,芯片禁止写入,但是其他的功能正常。当WP引脚为高电平时,所有的功能都正常。当CS为低时,WP变为低可以中断对芯片的写操作。但是如果内部的写周期已经被初始化后,WP变为低不会对写操作造成影响。 二、硬件连接
三、程序设计 状态寄存器: WIP:写操作标志位,为1表示内部有一个写操作正在进行,为0则表示空闲,该位为只读。 WEL:写操作允许标志位,为1表示允许写操作,为0表示禁止写,该位为只读。 BL0,BL1:内部保护区间的地址选择。被保护的区间不能进行看门狗的定时编程。 WD0,WD1:可设定看门狗溢出的时间。有四种可选择:1.4s,600ms,200m s,无效。 操作码: WREN 0x06 设置写允许位 WRDI 0x04 复位写允许位 RDSR 0x05 读状态寄存器 WRSR 0x01 写状态寄存器 READ 0x03/0x0b 读操作时内部EEPROM页地址 WRITE 0x02/0x0a 写操作时内部EEPROM页地址
看门狗电路。在单片机中,为了能使得程序能够正常的运行。设定的及时根据程序所返回的值检测程序运行情况的定时电路。 在主程序中设定一定的值,把这个值在看门狗定时电路数值益处之前定时赋给看门狗赋给定时电路,让看门狗定时器复位。主程序的赋值周期要小于看门狗定时电路的运行周期。 看门狗 百科名片 单片机"看门狗" 在由单片机构成的微型计算机系统中,由于单片机的工作常常会受到来自外界电磁场的干扰,造成程序的跑飞,而陷入死循环,程序的正常运行被打断,由单片机控制的系统无法继续工作,会造成整个系统的陷入停滞状态,发生不可预料的后果,所以出于对单片机运行状态进行实时监测的考虑,便产生了一种专门用于监测单片机程序运行状态的芯片,俗称"看门狗"(watchdog) 目录[隐藏] 应用 基本原理 看门狗使用注意 看门狗运用 设计思路 [编辑本段]应用 看门狗电路的应用,使单片机可以在无人状态下实现连续工作,其工作原理是:看门狗芯片和单片机的一个I/O引脚相连,该I/O引脚通过程序控制它定时地往看门狗的这个引脚上送入高电平(或低电平),这一程序语句是分散地放在单片机其他控制语句中间的,一旦单片机由于干扰造成程序跑飞后而陷入某一程序段进入死循环状态时,写看门狗引脚的程序便不能被执行,这个时候,看门狗电路就会由于得不到单片机送来的信号,便在它和单片机复位引脚相连的引脚上送出一个复位信号,使单片机发生复位,
即程序从程序存储器的起始位置开始执行,这样便实现了单片机的自动复位。 [编辑本段]基本原理 看门狗,又叫watchdog timer,是一个定时器电路, 一般有一个输入,叫喂狗(kicking the dog or service the dog),一个输出到MCU的RST端,MCU正常工作的时候,每隔一端时间输出一个信号到喂狗端,给WDT 清零,如果超过规定的时间不喂狗,(一般在程序跑飞时),WDT 定时超过,就会给出一个复位信号到MCU,使MCU复位. 防止MCU死机. 看门狗的作用就是防止程序发生死循环,或者说程序跑飞。工作原理:在系统运行以后也就启动了看门狗的计数器,看门狗就开始自动计数,如果到了一定的时间还不去清看门狗,那么看门狗计数器就会溢出从而引起看门狗中断,造成系统复位。所以在使用有看门狗的芯片时要注意清看门狗。硬件看门狗是利用了一个定时器,来监控主程序的运行,也就是说在主程序的运行过程中,我们要在定时时间到之前对定时器进行复位如果出现死循环,或者说PC指针不能回来。那么定时时间到后就会使单片机复位。常用的WDT芯片如MAX813 ,5045, IMP 813等,价格4~10元不等. 软件看门狗技术的原理和这差不多,只不过是用软件的方法实现,我们还是以51系列来讲,我们知道在51单片机中有两个定时器,我们就可以用这两个定时器来对主程序的运行进行监控。我们可以对T0设定一定的定时时间,当产生定时中断的时候对一个变量进行赋值,而这个变量在主程序运行的开始已经有了一个初值,在这里我们要设定的定时值要小于主程序的运行时间,这样在主程序的尾部对变量的值进行判断,如果值发生了预期的变化,就说明T0中断正常,如果没有发生变化则使程序复位。对于T1我们用来监控主程序的运行,我们给T1设定一定的定时时间,在主程序中对其进行复位,如果不能在一定的时间里对其进行复位,T1 的定时中断就会使单片机复位。在这里T1的定时时间要设的大于主程序的运行时间,给主程序留有一定的的裕量。而T1的中断正常与否我们再由T0定时中断子程序来监视。这样就够成了一个循环,T0监视T1,T1监视主程序,主程序又来监视T0,从而保证系统的稳定运行。51 系列有专门的看门狗定时器,对系统频率进行分频计数,定时器溢出时,将引起复位.看门狗可设定溢出率,也可单独用来作为定时器使用。凌阳61的看门狗比较单一,一个是时间单一,第二是功能在实际的使用中只需在循环当中加入清狗的指令就OK了。AVR系列中,avr-libc 提供三个API 支持对器件内部Watchdog 的操作,它们分别是:wdt_reset() // Watchdog 复位wdt_enable(timeout) // Watchdog 使能wdt_disable() // Watchdog 禁止C8051Fxxx单片机内部也有一个21位的使用系统时钟的定时器,该定时器检测对其控制寄存器的两次特定写操作的时间间隔。如果这个时间间隔超过了编程的极限值,将产生一个WDT复位。-------------------------------------------------------------------------------- [编辑本段]看门狗使用注意
看门狗分硬件看门狗和软件看门狗。硬件看门狗是利用一个定时器电路,其定时输出连接到电路的复位端,程序在一定时间范围内对定时器清零(俗称“喂狗”),因此程序正常工作时,定时器总不能溢出,也就不能产生复位信号。如果程序出现故障,不在定时周期内复位看门狗,就使得看门狗定时器溢出产生复位信号并重启系统。软件看门狗原理上一样,只是将硬件电路上的定时器用处理器的内部定时器代替,这样可以简化硬件电路设计,但在可靠性方面不如硬件定时器,比如系统内部定时器自身发生故障就无法检测到。当然也有通过双定时器相互监视,这不仅加大系统开销,也不能解决全部问题,比如中断系统故障导致定时器中断失效。 看门狗本身不是用来解决系统出现的问题,在调试过程中发现的故障应该要查改设计本身的错误。加入看门狗目的是对一些程序潜在错误和恶劣环境干扰等因素导致系统死机而在无人干预情况下自动恢复系统正常工作状态。看门狗也不能完全避免故障造成的损失,毕竟从发现故障到系统复位恢复正常这段时间内怠工。同时一些系统也需要复位前保护现场数据,重启后恢复现场数据,这可能也需要一笔软硬件的开销。 图1:(a) 多任务系统看门狗示意图;(b) 相应的看门狗复位逻辑图。 在单任务系统中看门狗工作原理如上所述,容易实现。在多任务系统中情况稍为复杂。假如每个任务都像单任务系统那么做,如图1(a)所示,只要有一个任务正常工作并定期“喂狗”,看门狗定时器就不会溢出。除非所有的任务都故障,才能使得看门狗定时器溢出而复位,如图1(b)。 而往往我们需要的是只要有一个任务故障,系统就要求复位。或者选择几个关键的任务接受监视,只要一个任务出问题系统就要求复位,如图2(a)所示,相应的看门狗复位逻辑如图2(b)所示。 在多任务系统中通过创建一个监视任务TaskMonitor,它的优先级高于被监视的任务群Task1、Task2...Taskn。TaskMonitor在Task1~Taskn正常工作情况下,一定时间内对硬件看门狗定时器清零。如果被监视任务群有一个Task_x出现故障,TaskMonitor就不对看门狗定时器清零,也就达到被监视任务出现故障时系统自动重启的目的。另外任务TaskMonitor自身出故障时,也不能及时对看门狗定时器清零,看门狗也能自动复位重启。
C51单片机看门狗电路及 程序设计案 院系:信息工程学院 年级:2010级 电子一班禹豪 电子一班训虎 电子二班邓启新 一、引言 在由单片机构成的微型计算机系统中,程序的正常运行常常会因为来自外界的电磁场干扰等原因而被打断,从而造成程序的跑飞,而陷入死循环。由此导致单片机控制的系统无法继续工作,造成整个系统的陷入停滞状态,发生不可预料的后果,所以出于对单片机运行状态进行实时监测的考虑,便产生了一种专门用于监测单片机程序运行状态的芯片或程序,俗称"看门狗"(watchdog) (1)看门狗电路基本原理 看门狗电路的应用,使单片机可以在无人状态下实现连续工作,其工作原理是:看门狗芯片和单片机的一个I/O引脚相连**,该I/O引脚通过程序控制它定时地往看门狗的这个引脚上送入高电平(或低电平),这一程序语句是分散地放在单片机其他控制语句中间的,一旦单片机由于干扰造成程序跑飞后而陷入某一程序段进入死循环状态时,写看门狗引脚的程序便不能被执行,这个时候,看门狗电路就会由于得不到单片机送来的信号,便在它和单片机复位引脚相连的引脚上送出一个复位信号,使单片机发生复位,即程序从程序存储器的起始位置开始执行,这样便实现了单片机的自动复位。 *此处设计原理实际上为下文中硬件看门狗设计思路。
(2)看门狗电路一般设计式 “看门狗”电路一般分为硬件看门狗与软件看门狗两种设计式。 硬件看门狗是利用了一个定时器,来监控主程序的运行,也就是说在主程序的运行过程中,我们要在定时时间到之前对定时器进行复位。如果出现死循环,或者说PC指针不能回来,那么定时时间到后就会使单片机复位。常用的WDT芯片如MAX813,5045,IMP 813等,价格4~10元不等. 软件看门狗技术的原理和硬件看门狗类似,只不过是用软件的法实现(即利用单片机部定时器资源,通过编程模拟硬件看门狗工作式),以51系列为例:因在51单片机中有两个定时器,在利用部定时器资源来对主程序的运行进行监控时。可以对T1(或T0)设定一定的定时时间(设定的定时值要小于主程序的运行时间),当产生定时中断的时候对一个变量进行赋值(此变量在主程序运行的开始已有一个初值)。当主程序运行至最后时对此变量的值进行判断,如果值发生了预期的变化,就说明T0中断正常,如果没有发生变化则使程序复位。 考虑到设计要求,本设计采用软件看门狗设计思路。 二、看门狗电路整体设计思路 根据设计要求,本设计利用C51单片机部自带的定时器1进行编程,并配合少量电路实现“看门狗“电路功能。整个设计分为软件部分与硬件部分,如下: (1)软件部分设计原理: 软件设计分为三部分:“看门狗“定时器设置程序、溢出中断服务程序和喂狗代码。 1.1设计思路: 1)在主程序开头,“看门狗“定时器设置程序设置定时器1计时50ms。 2)当定时达50ms时,定时器1产生溢出中断,溢出中断服务程序开始工作,将看门狗标志num加1。当num的值等于100时,说明看门狗定时器已经计时5s,此时,单片机I/O端口P1.0输出高电平,对程序进行复位。 3)在此过程中,喂狗代码将被穿插于程序中循环体末尾。当循环体结束时,喂狗代码执行,关闭定时器1、清空num并重新初始化定时器设置。若循环体进入死循环,喂狗代码无法执行,num将一直累加至100,此时程序复位。 注:喂狗代码放置位置可根据num预计数值进行调整:当num门限值较小,即看门狗计数时间较短时,喂狗代码可放于程序中各循环体之后或均匀分布于整个主程序中。当num门限值较大,即看门狗计数时间较长时,喂狗代码可放于程序主循环体末尾。但是需注意看门狗计数时间必须长于正常工作时间,以免非正常复位。 1.2软件设计流程图:
看门狗技术在改善系统可靠性中的应用 李观文,衣 平,邓英华 (河南96550部队,471031) 摘要:工业控制系统中,对系统可靠性要求比较高,尤其以一些利用计算机软件作为控制核心的系统,如数控机床、机器人、自动化设备等等,系统的故障会造成一些严重的后果,本文介绍一种简单、有效的措施改善这类系统可靠性 采用看门狗电路。 关键词:看门狗;可靠性;延时周期;输入端(W DI);编程控制 中图分类号:T P273 文献标识码:B 文章编号:1004-0420(2005)01-0026-03 Application of the watchdog technique to improve the system reliability LI Guan-w en,Y I Ping,DENG Ying-hua (U nit96550,H enan,471031) Abstract:T he hig her level system of r eliability is requir ed in industrial co nt rol system,especially in the system that t he softw ar e o f com puter is the co re of co ntro l,such as N C machine t ool,robot,auto mation equipm ent etc;sys temat ic failure causes some ser ious bad result s.T he w atchdo g circuit,o ne kind of simple a nd efficacious method to im prov e the sy st em reliabilit y w as intro duced. Key words:w atchdog;r eliability;delay cy cle;input(WD I);pro gr am contr ol 0 引言 目前,在许多情况下设计人员会用软件实现以往由硬件完成的电路功能,其中部分原因是,低成本的微处理器( P)为大家提供了广泛的选择。软件常常是解决问题的成本最低、灵活性最高的方案,但它也迫使设计人员进行一些额外的测试以确保系统的可靠性。当然如果程序没有代码错误也就不存在上述问题,细心的测试能够在1000条指令中减少1至10条错误。而设计人员则希望在10,000条指令中出错率不要超过十处。 在台式机系统中出现导致系统瘫痪的软件错误并不可怕,因为用户只需重新启动系统即可,它只会造成少量数据的丢关。然而,对于运行在工业控制系统的软件,系统必须能够在没有人为干预的条件下恢复故障。这一特性在两种情况下非常关键:一种是高有效性系统,如服务器、电话系统以及生产线等;另一种是高可靠性系统,一旦出现错误将造成伤害,如汽车、机床、医疗设备、工业控制、机器人、自动门等。即使不考虑这些要求严格的应用,系统在无需用户干预(按下复位键或重新上电)的条件下自动从故障状态下恢复也是很有益处的,这种设备的好处是显而易见的,因为用户觉察不到设备内部出现了问题。改善这类系统可靠性的一种简单、有效的措施是采用看门狗技术。 1 看门狗 看门狗是一个计数器,它需要在一定的看门狗延时周期内被清零,如果没有清零动作,看门狗电路将产生一个复位信号使系统重新启动或建立一个非屏蔽中断(N M I)、执行故障恢复子程序。大多数看门狗电路是沿触发,这样无论是上升沿还是下降沿触发看门狗的输入端(WD I)都能够清计数器。WDI引脚连接在处理器的一个I/O口,这条口线由软件触发(图1) 。 图1 微处理器通过在W DI引脚发送脉冲 清除看门狗定时器以防复位 26
STM32窗口看门狗程序 窗口看门狗(WWDG)通常被用来监测由外部干扰或不可预见的逻辑条件造成的应用程序背离正常的运行序列而产生的软件故障。除非递减计数器的值在T6位(WWDG->;CR的第六位)变成0前被刷新,看门狗电路在达到预置的时间周期时,会产生一个MCU复位。在递减计数器达到窗口配置寄存器(WWDG->;CFR)数值之前,如果7位的递减计数器数值(在控制寄存器中)被刷新,那么也将产生一个MCU复位。这表明递减计数器需要在一个有限的时间窗口中被刷新。
图 3.6.1.1中,T[6:0]就是WWDG_CR的低七位,W[6:0]即是WWDG->;CFR的低七位。T[6:0]就是窗口看门狗的计数器,而W[6:0]则是窗口看门狗的上窗口,下窗口值是固定的(0X40)。当窗口看门狗的计数器在上窗口值之外被刷新,或者低于下窗口值都会产生复位。 上窗口值(W[6:0])是由用户自己设定的,根据实际要求来设计窗口值,但是一定要确保窗口值大于0X40,否则窗口就不存在了。 窗口看门狗的超时公式如下: Twwdg=(4096×2^WDGTB×(T[5:0]+1)) /Fpclk1; 其中: Twwdg:WWDG超时时间(单位为ms) Fpclk1:APB1的时钟频率(单位为Khz) WDGTB:WWDG的预分频系数 T[5:0]:窗口看门狗的计数器低6位 窗口看门狗寄存器介绍:
如何使用窗口看门狗: 1)使能WWDG时钟 2)设置WWDG_CFR和WWDG_CR两个寄存器 在时钟使能完后,我们设置WWDG的CFR和CR两个寄存器,对WWDG进行配置。包括使能窗口看门狗、开启中断、设置计数器的初始值、设置窗口值并设置分频数WDGTB 3)开启WWDG中断并分组 4)编写中断服务函数 软件例程: //---------------------------wdg.c----------------------- #include "wdg.h" #include "led.h" u8 wwdg_cnt=0x7f; //窗口看门狗计数器初值 void wwdg_init(u8 tr,u8 wr,u8 fprer) { RCC->;APB1ENR|=1;CFR|=fprer;CFR|=1;CFR&=0xff80; //窗口值清零 WWDG->;CFR|=wr; //设定窗口值 WWDG->;CR|=(wwdg_cnt|1;CR|=(cnt&0x7f); //喂狗值 } void WWDG_IRQHandler(void)
瑞士EM6323复位+看门狗芯片 描述 EM6323/24是低功耗,高精密复位IC 具有手动复位和看门狗输入。他们有 不同的阈值电压和几个超时复位期间 (TPOR)和看门狗超时周期为最大(TWD) 在应用程序的灵活性。EM6323具有手动复位(MR 内部上拉)和一个看门狗输入引脚。EM6324具有 只有一个看门狗输入引脚(WDI)。看门狗功能 被禁用或三态驱动器驱动世界发展指标“ 让世界发展指标“无关。这是有用的,当MCU 睡眠模式。 小型SOT23-5L封装以及超低电源电流 3.8μAEM6323和EM6324的理想选择 便携式和电池供电设备。 特点 !超低电源电流3.8μA(VDD = 3.3V) !工作温度范围:-40°C至+125°C的 !复位门限精度±1.5% !11复位阈值电压VTH,4.63V,4.4V,3.08V, 2.93V,2.63V,2.2V,1.8V,1.66V,1.57V,1.38V,1.31V !200ms的复位超时周期(1.6ms,25ms的,1600ms之间 请求) ! 1.6s的看门狗超时周期(6.2ms,102ms,25.6s 请求) !3重置输出选项: 低电平复位推,拉 低电平复位漏极开路 高电平复位推- 拉 !在睡眠模式下的单片机检测 复位阈值电压: 看门狗输入。世界发展指标“必须与CMOS输出驱动。如果单片机的I / O在高阻抗条件下,电路将检测到这种情况,作为微控制器在休眠模式,并防止 其看门狗超时 阈值电压 复位输出 一个微处理器(μP)复位输入开始在微处理器 已知状态。EM6323/24微处理器监控电路 断言复位,以防止代码执行错误,在 上电,掉电和欠压条件。复位 保证是低的VDD下降至0.9V的逻辑。
看门狗电路设计 在工业现场运行的单片机应用系统,由于坏境恶劣,常有强磁场、电源尖峰、电火花等外界干扰,这些干扰可能造成仪表中单片机的程序运行出现“跑飞”现象,引起程序混乱,输出或显示不正确,甚至“死机”。系统无法继续正常的运行,处在一种瘫痪状态,它的硬件电路并没有损坏,只是内部程序运行出现了错误,这时,即使干扰消失,系统也不会恢复正常,这就需要采取一些措施来保障系统失控后能自动恢复正常,“程序运行几天来视系统”(Watchdog看门狗)就是常用的一种抗干扰措施,用以保证系统因干扰失控后能自动复位。为了提高仪表可靠性及抗干扰能力,通常在智能仪表中采用“看门狗”技术。 看门狗电路它实质上是一个可由CPU复位的定时器,它的定时时间是固定不变的,一旦定时时间到,电路就产生复位信号或中断信号。当程序正常运行时,在小于定时时间隔内,单片机输出一信号刷新定时器,定时器处于不断的重新定时过程,因此看门狗电路就不会产生复位信号或中断信号,反之,当程序因出现干扰而“跑飞”时,单片机不能刷新定时器,产生复位信号或产生中断信号使单片机复位或中断,在中断程序中使其返回到起始程序,恢复正常。 它的工作原理如同图3-4所示的两个计时周期不同的定时器T1和T2是两个时钟源相同的定时器,设T1=1.0s,T2=1.1s,而用T1定时器的溢出脉冲P1同时对T1和T2定时器清零,只要T1定时器工作正常,则定时器T2永远不可能计时溢出。当T1定时器不在计时,定时器T2则会计时溢出,并产生溢出脉冲P2。一旦产生溢出脉冲P2,则表明T1出了故障。这里的T2即是看门狗。利用溢出脉冲P2并进行巧妙的程序设计,可以检测系统的出错,而后使“飞掉”的程序重新恢复运行。 图3-4 看门狗工作原理示意图 看门狗电路的应用,使单片机可以在无人关态下实现连续工作。看门狗芯片和单片机的一个I/O引脚相连,该I/O引脚通过程序控制它定时地往看门狗的这
看门狗电路的概念和作用 2007/08/05 15:26 一般看门狗电路用来监视MCU内部程序运行状态,在程序跑飞或死锁情况下,可以自动复位。不过由于厂家、型号不同可能有些差别。 看门狗电路的工作原理是:当系统工作正常时,CPU将每隔一定时间输出一个脉冲给看门狗,即“喂狗”,若程序运行出现问题或硬件出现故障时而无法按时“喂狗”时,看门狗电路将迫使系统自动复位而重新运行程序。主要作用是防止程序跑飞或死锁 看门狗电路其实是一个独立的定时器,有一个定时器控制寄存器,可以设定时间(开狗),到达时间后要置位(喂狗),如果没有的话,就认为是程序跑飞,就会发出RESET指令 在由单片机构成的微型计算机系统中,由于单片机的工作常常会受到来自外界电磁场的干扰,造成程序的跑飞,而陷入死循环,程序的正常运行被打断,由单片机控制的系统无法继续工作,会造成整个系统的陷入停滞状态,发生不可预料的后果,所以出于对单片机运行状态进行实时监测的考虑,便产生了一种专门用于监测单片机程序运行状态的芯片,俗称"看门狗" 看门狗电路电路的应用,使单片机可以在无人状态下实现连续工作,其工作原理是:看门狗芯片和单片机的一个I/O引脚相连,该I/O引脚通过程序控制它定时地往看门狗的这个引脚上送入高电平(或低电平),这一程序语句是分散地放在单片机其他控制语句中间的,一旦单片机由于干扰造成程序跑飞后而陷入某一程序段进入死循环状态时,写看门狗引脚的程序便不能被执行,这个时候,看门狗电路就会由于得不到单片机送来的信号,便在它和单片机复位引脚相连的引脚上送出一个复位信号,使单片机发生复位,即程序从程序存储器的起始位置开始执行,这样便实现了单片机的自动复位. 看门狗,又叫 watchdog timer,是一个定时器电路, 一般有一个输入,叫喂狗,一个输出到MCU的RST端,MCU正常工作的时候,每隔一端时间输出一个信号到喂狗端,给 WDT 清零,如果超过规定的时间不喂狗,(一般在程序跑飞时),WDT 定时超过,就回给出一个复位信号到MCU,是MCU复位. 防止MCU死机. 看门狗的作用就是防止程序发生死循环,或者说程序跑飞。
用CD4060制作看门狗报警电路 看门狗定时器(WDT,Watch Dog Timer)是单片机的一个组成部分,它实际上是一个计数器,一般给看门狗一个大数,程序开始运行后看门狗开始倒计数。如果程序运行正常,过一段时间CPU应发出指令让看门狗,重新开始倒计数。如果看门狗减到0就认为程序没有正常工作,强制整个系统复位。 原理图: CD4060芯片特性 1) 电压范围宽,应该可以工作在3V~15V,输入阻抗高,驱动能力差外,跟74系列的功能基本没有区别; 2) 输入时,1/2工作电压以下为0,1/2工作电压以上为1; 3) 输出时,1=工作电压;0=0V; 4) 驱动能力奇差,在设计时最多只能带1个TTL负载; 5) 如果加上拉电阻的话,至少要100K电阻; 6) 唯一现在使用的可能就是计数器,CD4060的计数器可以到14级二进制串行计数。 以AT89C51为例: 看门狗电路由14位二进制计数器CD4060和三极管VT1、VT2等组成。
Vout接单片机AT89C51的引脚输出口P1.7,由单片机的CPU向看门狗电路发送喂狗信号——正脉冲,在两个正脉冲间隔内,P1.7保持为低电平(此功能要结合软件才能实现,相应的软件设计在下面介绍)。我们知道,单片机AT89C51的I/O口带灌电流负载的能力比较大,每个引脚低电平时的吸入电流为20 mA,带拉电流负载的能力却很小,实测情况是,每个引脚高电平时的输出电流仅25μA,现在P1.7口被设计成带拉电流负载的方式,为了提高P1.7口带拉电流负载的能力,所以,电路中设置了上拉电阻R3。 14位二进制计数器CD4060的计数脉冲由其内部振荡器和外接阻容元件R1、R2、C1组成的电路产生,振荡周期为 T0SC=2.2×R1×C1=0.22 ms 振荡器产生的计数脉冲(矩形波)可以直接引出,同时还可以从CD4060的10个输出端Q4~Q10和Q12~Q14得到不同分频系数的方波输出,各方波输出信号的周期如表1所示。这样,如果CD4060得不到CPU通过P1.7口发送来的喂狗信号——正脉冲,则CD4060的输出端Q14在1.8S内将产生一个完整周期的方波信号,而且低电平在前,高电平在后,其高电平经三极管VT1、VT2处理后形成单片机AT89C51的复位信号,使单片机AT89C51复位。由此可见,单片机AT89C51正常工作时,只要在0.9S内从P1.7口送出一个正脉冲,便可及时清零看门狗,输出端Q14就不会产生定时溢出信号,从而使看门狗电路对单片机系统不起作用。并且,从CD4060的10个输出端Q4~Q10和Q12~Q14可以得到不同周期的方波信号,经三极管VT1、VT2处理后形成单片机系统的复位信号,可以适应不同用户应用程序,从而该硬件看门狗电路可以适应不同的单片机应用系统。 对MCS-51系列的单片机而言,它所需要的复位信号是高电平宽度大于2个机器周期的正脉冲,例如,单片机的时钟脉冲频率为12 MHz时,则所需要的复位信号高电平宽度为2μs以上就可以了,而由上面的分析可知,CD4060的Q14输出的是高电平宽度为0.9 s的方波,如果让它直接作为单片机的复位信号,则单片机的复位时间势必在0.9 s以上,这样尽管可以使程序跑飞的单片机复位,但是显然没有做到尽快地引导跑飞的程序到正确的轨道来,如果这样做的话,对于某些单片机应用系统而言可能带来非常严重的后果。图1中的三极管VT1、VT2及其周围阻容元件构成波形转换电路,把较宽的正脉冲变换为较窄的正脉冲,从而较好地解决了上述的问题。三极管VT1、VT2构成的2级直接耦合放大器作为缓冲器使用,它是CD4060的输出端Q14的灌电流负载,C2、R8是微分电路。 经分析后不难看出,电路中的R7、R8、C2还具有单片机上电复位的功能。 2 上电复位与看门狗信号复位的不同处理过程 由于程序跑飞很可能会造成一些随机破坏事件,对某些系统而言,希望尽可能从断点处恢复运行,因此,有必要妥善解决跑飞的程序回复后的处理。 单片机应用系统上电时,上电复位电路会使得单片机处于复位状态,这一般称为冷启动,这种情况下,单片机处于复位状态表现为: (1) 程序计数器PC的值为0000H。 (2) I/O口(P0、P1、P2、P3(1))为FFH状态,即准双向I/O口的输入状态。 (3) 堆栈指示器SP=07H,即堆栈底为片内RAM的07H单元。 (4) 除上述状态外,所有特殊功能寄存器SFR的有效位均为0。 (5) 上电复位时,由于是重新供电,RAM在断电时数据丢失,上电复位后为随机数。
MAX813L芯片中文资料(看门狗及复位专用芯片) 1 MAX813L芯片及其工作原理 1.1 MAX813L芯片特点 · 加电、掉电以及供电电压下降情况下的复位输出,复位脉冲宽度典型值为200 ms。 · 独立的看门狗输出,如果看门狗输入在1.6 s未被触发,其输出将变为高电平。 · 1.25 V门限值检测器,用于电源故障报警、电池低电压检测或+5 V 以外的电源*。 · 门限电压为4.65V · 低电平有效的手动复位输入。 · 8引脚DIP封装。 1.2 MAX813L的引脚及功能 1.2.1 MAX813L芯片引脚排列见图1—1 1.2.2 引脚功能及工作原理说明
(1)手动复位输入端() 当该端输入低电平保持140 ms以上,MAX813L就输出复位信号.该输入端的最小输入脉宽要求可以有效地消除开关的抖动。与 TTL/CMOS兼容。 (2)工作电源端(VCC):接+5V电源。 (3)电源接地端(GND):接0 V参考电平。 (4)电源故障输入端(PFI) 当该端输入电压低于1.25 V时,5号引脚输出端的信号由高电平变为低电平。 (5)电源故障输出端() 电源正常时,保持高电平,电源电压变低或掉电时,输出由高电平变为低电平。 (6)看门狗信号输入端(WDI) 程序正常运行时,必须在小于1.6 s的时间间隔向该输入端发送一个脉冲信号,以清除芯片部的看门狗定时器。若超过1.6 s该输入端收不到脉冲信号,则部定时器溢出,8号引脚由高电平变为低电平。 (7)复位信号输出端(RST) 上电时,自动产生200 ms的复位脉冲;手动复位端输入低电平时,该端也产生复位信号输出。
单片机看门狗(Watchdog)的工作原理及其应用 2010年05月16日星期日 23:00 在由单片机构成的微型计算机系统中,由于单片机的工作常常会受到来自外界电磁场的干扰,造成程序的跑飞,而陷入死循环。程序的正常运行被打断,由单片机控制的系统无法继续工作,会造成整个系统的陷入停滞状态,发生不可预料的后果。所以,出于对单片机运行状态进行实时监测的考虑,便产生了一种专门用于监测单片机程序运行状态的芯片,俗称"看门狗"(watchdog)。 看门狗电路的应用,使单片机可以在无人状态下实现连续工作,其工作原理是:看门狗芯片和单片机的一个I/O引脚相连,该I/O引脚通过程序控制它定时地往看门狗的这个引脚上送入高电平(或低电平),这一程序语句是分散地放在单片机其他控制语句中间的,一旦单片机由于干扰造成程序跑飞后而陷入某一程序段进入死循环状态时,写看门狗引脚的程序便不能被执行。这个时候,看门狗电路就会由于得不到单片机送来的信号。便在它和单片机复位引脚相连的引脚上送出一个复位信号。使单片机发生复位,即程序从程序存储器的起始位置开始执行,这样便实现了单片机的自动复位。 看门狗,又叫 watchdog timer,是一个定时器电路。一般有一个输入,叫喂狗(kicking the dog or service the dog),一个输出到MCU的RST端,MCU 正常工作的时候,每隔一端时间输出一个信号到喂狗端,给 WDT 清零。如果超过规定的时间不喂狗,(一般在程序跑飞时),WDT 定时超过,就会给出一个复位信号到MCU,是MCU复位,防止MCU死机。看门狗的作用就是防止程序发生死循环,或者说程序跑飞。 工作原理:在系统运行以后也就启动了看门狗的计数器,看门狗就开始自动计数,如果到了一定的时间还不去清看门狗,那么看门狗计数器就会溢出从而引起看门狗中断,造成系统复位。所以,在使用有看门狗的芯片时要注意清看门狗。 硬件看门狗是利用了一个定时器,来监控主程序的运行,也就是说在主程序的运行过程中,我们要在看门狗定时器定时时间到之前对其进行复位。如果出现死循环,或者说PC指针不能回来,那么定时时间到后就会使单片机复位。常用的WDT芯片如MAX813 ,5045, IMP 813等,价格4~10元不等。 软件看门狗技术的原理和这差不多,只不过是用软件的方法实现,我们还是以51系列来讲,我们知道在51单片机中有两个定时器,我们就可以用这两个定时器来对主程序的运行进行监控。我们可以对T0设定一定的定时时间,当产生定时中断的时候对一个变量进行赋值,而这个变量在主程序运行的开始已经有了一个初值,在这里我们要设定的定时值要小于主程序的运行时间,这样在主程序的尾部对变量的值进行判断,如果值发生了预期的变化,就说明T0中断正常,如果没有发生变化则使程序复位。对于T1我们用来监控主程序的运行,我们给T1设定一定的定时时间,在主程序中对其进行复位,如果不能在一定的时间里对其进行复位,T1 的定时中断就会使单片机复位。在这里T1的定时时间要设的大于主程序的运行时间,给主程序留有一定的的裕量。而T1的中断正常与否我们再由T0定时中断子程序来监视。这样就够成了一个循环,T0监视T1,T1监