* 实验说明 : 8位数码管显示0~F #include
郑煤集团( 登封) 教学二矿 矿井人员定位系统 设 计 方 案 编制单位: 郑煤集团( 登封) 教学二矿编制时间: 二0一0年十一月 郑煤集团( 登封) 教学二矿
矿井人员定位系统设计方案说明书 生产规模: 45万吨/年 矿长: 李同河 技术负责人: 刘建军 编写: 匡久刘超峰李海军 会审: 李同河刘建军郑勤峰邵吉利王俊营 编写单位: 郑煤集团( 登封) 教学二矿 编写时间: 二0一0年十一月 教学二矿人员定位系统设计方案 根据国家安全监管总局【】146号, 关于《建设完善煤矿井下安全避险”六大系统”的通知》文件要求和河南省、郑煤集团有关文件精神, 完善井下安全避险”六大系统”, 进步一提高我矿
安全生产保障能力, 结合我矿实际, 特编制人员定位系统设计方案: 一、煤矿人员监控工程设计编制依据 1、 AQ6201——《煤矿安全监控系统通用技术要求》 AQ6210——《煤矿井下作业人员位置监测与管理系统通用技术条件》 2、 AQ1018 ---- 《煤矿井下作业人员管理系统使用与管理规范》 3、《煤矿安全规程》 4、国家安全监管总局国家煤矿安监局关于《建设完善煤矿井下安全避险”六大系统”的通知》( 安监总煤装【】146号) 5、《教学二矿井下安全避险”六大系统”实施方案》 二、组织领导机构 成立人员定位系统管理领导组: 组长: 李同河 副组长: 刘建军、郑勤峰 成员: 邵吉利、王俊营、匡久、孙坤东、王克勋、徐少歌、卢付臣 办公室设在综合调度室, 综合调度室主任负责做好人员定位系统专项设计等日常工作。 三、人员管理系统组成 人员管理系统主要由监控计算机、系统软件、人员定位分站、
一设计题目基于51单片机的超声波测距 二设计者 姓名班级学号组号 三、设计思路及框图、原理图 任务:以单片机为核心,设计并制作一超声波测距系统基本要求: 利用时间差测距,不考虑温度变化 用数码管显示测试结果 工作频率:450kHz 测距范围:0.5~10米 测试精度: 10% 发挥部分尽量增大测控范围,提高测试精度 1.系统的硬件结构设计 1.1. 超声波发生电路 发射电路主要由反相器74LS04和超声波发射换能器T构成,单片机P1.0端口输出的450kHz的方波信号一路经一级反向器后送到超声波换能器的一个电极,另一路经两级反向器后送到超声波换能器的另一个电极,用这种推换形式将方波信号加到超声波换能器的两端,可以提高超声波的发射强度。输出端采两个反向器并联,用以提高驱动能力。上位电阻R1O、R11一方面可以提高反向器74LS04输出高电平的驱动能力,另一方面可以增加超声波换能器的阻尼效果,缩短其自由振荡时间。 1.2超声波检测接收电路 采用集成电路CX20106A为超声波接收芯片。实验证明用CX20106A接收超声波(无信号时输出高电平),具有很好的灵敏度和较强的抗干扰能力。适当更改电
容C4的大小,可以改变接收电路的灵敏度和抗干扰能力。 1.3 显示电路 显示电路主要由74ls273芯片驱动,用PNPC8550三级管进行位选,七段共阳极数码管显示。 2.系统的软件结构设计 设计思路 主程序中包括温度补偿子程序,计算子程序,显示子程序。采用汇编编程。首先进行系统初始化。其次利用循环产生4个40KHZ的方波,由输出口进行输出,并开始计时。第三等待中断,若超声波被接收探头捕捉到,那么通过中断可测得
基于STC89C52单片机的电子密码锁 学生姓名: xx 学生学号: xxxxx 院(系):电气信息工程学院 年级专业: 2010级电子信息工程2班 指导教师:陶文英 二〇一三年六月 摘要
随着人们生活水平的提高,如何实现家庭防盗这一问题也变的尤其的突出,传统的机械锁由于其构造的简单,被撬的事情屡见不鲜,电子密码锁具有安全性能高,成本低,功耗低,操作简单等优点使其作为防盗卫士的角色越来越重要。 从经济实用角度出发,采用51系列单片机,设计一款可更改密码,LCD1602显示,具有报警功能,该电子密码锁体积小,易于开发,成本较低,安全性高,能将其存储的现场历史数据及时上报给上位机系统,实现网络实时监控,方便管理人员及时分析和处理数据。其性能和安全性已大大超过了机械锁,特点有保密性好,编码量多,远远大于弹子锁,随机开锁成功率几乎为零;密码可变,用户可以经常更改密码,防止密码被盗,同时也可以避免因人员的更替而使锁的密级下降;误码输入保护。当输入密码多次错误时,报警系统自动启动;电子密码锁操作简单易行,受到广大用户的亲睐。 关键词单片机, 密码锁, 更改密码, LCD1602 目录
错误!未定义书签。 1 绪论 1.1电子密码锁简介 (1) 1.2 电子密码锁的发展趋势 (1) 2 设计方案 (3) 3 主要元器件 (4) 3.1 主控芯片STC89C52 (4) 3.2 晶体振荡器 (8) 3.3 LCD显示密码模块的设计 (9) 3.3.1 LCD1602简介 (9) 3.3.2 LCD1602液晶显示模块与单片机连接电路 (11) 4 硬件系统设计 (12) 4.1 设计原理 (12) 4.2 电源输入电路 (12) 4.3 矩阵键盘 (13) 4.4 复位电路 (14) 4.5 晶振电路 (14) 4.6 报警电路 (15) 4.7 显示电路 (15) 4.8 开锁电路 (16) 4.9 电路总体构成 (16) 5 软件程序设计 (18) 5.1 主程序流程介绍 (18) 5.2 键盘模块流程图 (19) 5.3 显示模块流程图 (21) 5.4 修改密码流程图 (22) 5.5 开锁和报警模块流程图 (23) 6 电子密码锁的系统调试及仿真 (25) 6.1硬件电路调试及结果分析 (25) 6.2软件调试及功能分析 (25) 6.2.1调试过程 (25) 6.2.2 仿真结果分 (26)
基于Wi-Fi实时定位技术 矿山人员资产定位应用方案说明
目录 1引言 (3) 1.1文档说明 (3) 1.2术语与缩写解释 (3) 2项目需求 (4) 2.1项目背景 (4) 2.2需求分析 (4) 2.3方案优势 (4) 3方案设计 (5) 3.1设计理念 (5) 3.2功能描述 (6) 3.2.1定位监控 (6) 3.2.2标签管理 (7) 3.2.3报警管理 (7) 3.2.4系统管理 (8) 3.2.5扩展功能 (8) 3.2.6统计报表 (8) 3.3定位网络设计 (9) 4井下Wi-Fi无线定位监控通讯系统 (11) 4.1井下矿工定位考勤系统 (12) 4.2井下电机车定位管理 (12) 4.3Wi-Fi无线语音数据通信系统及Wi-Fi手机定位系统 (13) 4.3.1Wi-Fi网络–数据传输、语音通信、无线视频 (13) 4.3.2无线语音功能模块 (14) 4.3.3手机实时定位主要功能 (15) 5方案实施 (17) 5.1网络部署设计 (17) 5.2网络安装 (17) 5.3实施计划 (17) 5.3.1实施说明 (17) 5.3.2施工进度安排 (17)
1引言 1.1 文档说明 本文档为基于Wi-Fi的实时定位解决方案。 1.2 术语与缩写解释
2项目需求 2.1 项目背景 矿井的分布是分层结构的,井下面积很大,井下人员较多,为了保证井下人员的安全,防患于未然,监控矿车运作,我们将采用基于Wi-Fi的无线局域网实时定位系统对井下的矿工和矿车进行跟踪定位,随时了解每个矿工、矿车的当前位置。同时需要实现对每个矿工上下勤的监控功能和矿车矿石运输监管统计工作。基于Wi-Fi的无线局域网,需要实行语音通信、视频传输、环境信息采集等功能。 2.2 需求分析 1、人员、车辆的实时精确定位系统:通过井下电子地图,实时显示人员和车辆位置,记录移动轨迹。 2、人员考勤系统:每日自动统计人员进出矿井的次数和时间,能识别其他未经允许的人员擅自入内,并且报警。 3、Wi-Fi无线井下环境参数实时监控传感系统:通过Wi-Fi模块连接各类传感器,可以采集井下温度、湿度等环境参数,并且无线传输。 4、无线车辆识别监控系统及采矿量监控系统:车辆上安装的定位标签,电机车在井下定位区域可随时查询每台车所在位置、运行区间。系统根据判断出的矿车载体,自动跟踪矿车的运行轨迹,在监控轨迹与事先设定路线不符和时报警。 5、Wi-Fi无线语音通信系统:企业员工使用WLAN/GSM双模手机可在WLAN覆盖区包括井下优先通过Wi-Fi网络实现内部通话,参加电话会议,也可拨打PSTN外线电话,代替座机和手机的功能;离开WLAN覆盖区采用GSM拨打电话。不但可节省通话费用,而且可以通过无线网络和Wi-Fi手机开展定位、视频电话、会议电话等多种增值业务。 6、Wi-Fi无线视频监控系统:带有Wi-Fi的无线视频摄像头可以按装在移动的车辆上或者由矿工携带,实时无线传输视频图像。 2.3 方案优势 ?网络覆盖范围广,容易覆盖整个区域,设备可集中管理,维护成本低; ?可定位带有Wi-Fi模块的手机、PDA等其他Wi-Fi终端; ?Wi-Fi在室内外都工作; ?Wi-Fi支持上网,可以通过Wi-Fi网络上传数据; ?定位精度高 ?本地化服务,软硬件可订制。
测控技术与仪器专业课程设计报告 班级姓名学号起始时间 课程设计题目: 测控技术与仪器专业课程设计报告 摘 要:本文介绍了一种基于单片机的超声波测距仪的设计。详细给出了超声波测距仪的工作原理、超 声波发射电路和接受电路、测温电路、显示电路等硬件设计,以及相应的软件设计。设计中采用升压电路,提高了超声换能器的输出能力;采用红外接收芯片,减少了电路间相互干扰,提高了灵敏度;同时,考虑了环境温度对超声波测距的影响,采用温度传感器,提高了测量精度。该设计试验运行良好,系统结构简单、操作方便、价格低廉,具有广阔的推广前景。 关键字:超声波测距仪;超声波换能器;单片机;温度传感器 1 对题目的认识和理解 目前,常用的测距方法主要有毫米波测距、激光测距和超声波测距三种。超声波测距较前两种测距方法而言,具有指向性强、能耗缓慢、受环境因素影响较小等特点,广泛应用于如井深、液位、管道长度、倒车等短距离测量。 超声波测距适用于高精度中长距离测量。因为超声波在标准空气中传播速度为331.45m/s ,由单片机负责计时,单片机使用12.0M 晶振,所以此系统测量精度理论上可以达到毫米级。 目前比较普遍的测距的原理是:通过发射具有特征频率的超声波对被摄目标的探测,通过发射出特征频率的超声波和反射回接受到特征频率的超声波所用的时间,换算出距离,如超声波液位物位传感器,超声波探头,适合需要非接触测量场合,超声波测厚,超声波汽车测距告警装置等。 本设计选用频率为40kHZ 左右的超声波,它在空气中传播的效率最佳。由于超声波测距主要受温度影响较大,所以本设计增加了温度补偿电路。本设计具有电路简单、操作简便工作稳定可靠、测距精确和能耗小、成本低等特点,可实现无接触式测量,应用广泛。 1.1 超声波测距原理 超声波测距是通过超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即反射回来,超声波接收器收到回波就立即停止计时。根据计时器测出发射和接收回波的时间差t ,可以计算出发射点距障碍物的距离s :2 = t c s ,其中t c 为超声波在空气中的传 播速度,它随温度的变化而变化,其变化关系如下:331.50.6=+t c T 式中T 为环境摄氏温度,可由温 度传感器获取。
招远市黄金矿业工程有限责任公司矿用人员定位管理系统 目录
一、矿山基本情况 一、矿区概况 二、公司资质证书 见附件: 三、技术文件 第一节、概述 1.1背景和需求 煤矿安全生产事关人民群众的生命和财产安全,各级政府一贯高度重视煤矿安全生产问题,并采取一系列措施不断加强安全生产工作。通过不断的努力,近一时期煤矿安全生产状况总体上趋于稳定好转,但由于基础薄弱等种种原因,煤矿安全生产状况仍然不容乐观。如何改变目前煤矿企业对井下人员落后的管理模式,如何实现管理的现代化、信息化也成为所有煤矿企业关心的问题,因此建立以灾害预防、事故救助、电子信息化管理为主要目标的信息化和智能化建设势在必行。 1.2系统简述 (1)本系统是运用高科技手段开发研制。系统的核心识别设备采用了具有国际先进水平的微波技术,该技术采用了当今最先进的0.18uM的微波芯片技术,使产品的性能和原来的微波技术相比得到了本质的改进,彻底解决了远距离、大流量、超低功耗、高速移动的标识物的识别和数据传输难题,而且成本较以往大大降低,同时也解决了中低频电磁波技术感应距离短、防冲突能力差的致命弱点。 (2)系统能够及时、准确的将井下各个区域人员及设备的动态情况反映到地面计算机系统,使管理人员能够随时掌握井下人员、设备的分布状况和每个矿工的运动轨迹,以便于进行更加合理的调度管理。当事故发生时,救援人员也可根据矿用人员管理系统所提供的数据、图形,迅速
了解有关人员的位置情况,及时采取相应的救援措施,提高应急救援工作的效率。 (3)系统是集井下人员考勤、跟踪定位、井下信息发布、灾后急救、日常管理等一体的综合性运用系统,集合了国内识别技术、传输技术、软件技术等最顶尖的产品和技术,是目前国内技术最先进、运行最稳定、设计最专业化的井下人员定位系统。这一科技成果的实现,将为煤矿企业的安全生产和日常管理上台阶以及事故急救带来了新的契机。 1.3基本原理 1.3.1 系统应用原理说明 系统应由主机、传输接口、本安型读卡分站、识别卡、矿用隔爆兼本质安全型电源箱、电缆、接线盒、避雷器和其他必要设备组成。在井下主要巷道、交叉道口、必经之路等重要位置安装无线读卡分站,下井人员携带识别卡,识别卡能发射信号,当识别卡在接收器一定范围内时,读卡分站接收到识别卡发出的信号,将信号进行分析、处理,并把信号发送到地面,地面信号传输接口把信号进行转换,交给主机进行处理,从而实现目标的自动化管理。 识别卡具有双向通讯功能,当矿工遇到紧急事件时,可以按下紧急求救按钮,地面监控主机就会显示出求救人员的信息(包括在那个位置及人员情况),矿方可以在第一时间组织人员经行抢救及处理。 调度室综合所有安全因素,如果遇到大的问题,需要井下人员进行紧急撤离,可以向井下某人(或某地区人员)(或者全部人员)发出撤离命令,在第一时间保证人的安全。 管理者可以根据大屏幕上或电脑上的分布示意图查看某一区域,计算机即会把这一区域的人员情况统计并显示出来。中心站主机会根据一段时间的人员出入信息整理出这一时期的每个下井人员的各种出勤报表,作为工资发放的依据。同时全方位监控井下人员分布情况。 1.3.2 系统应用原理图 (一)设计原则 鉴于煤矿井下人员管理系统的重要性,我们以科学的方法、严谨的态度,认真对系统仔细的分析,力求达到系统设计的先进性、可靠性、实用性和可扩展性。
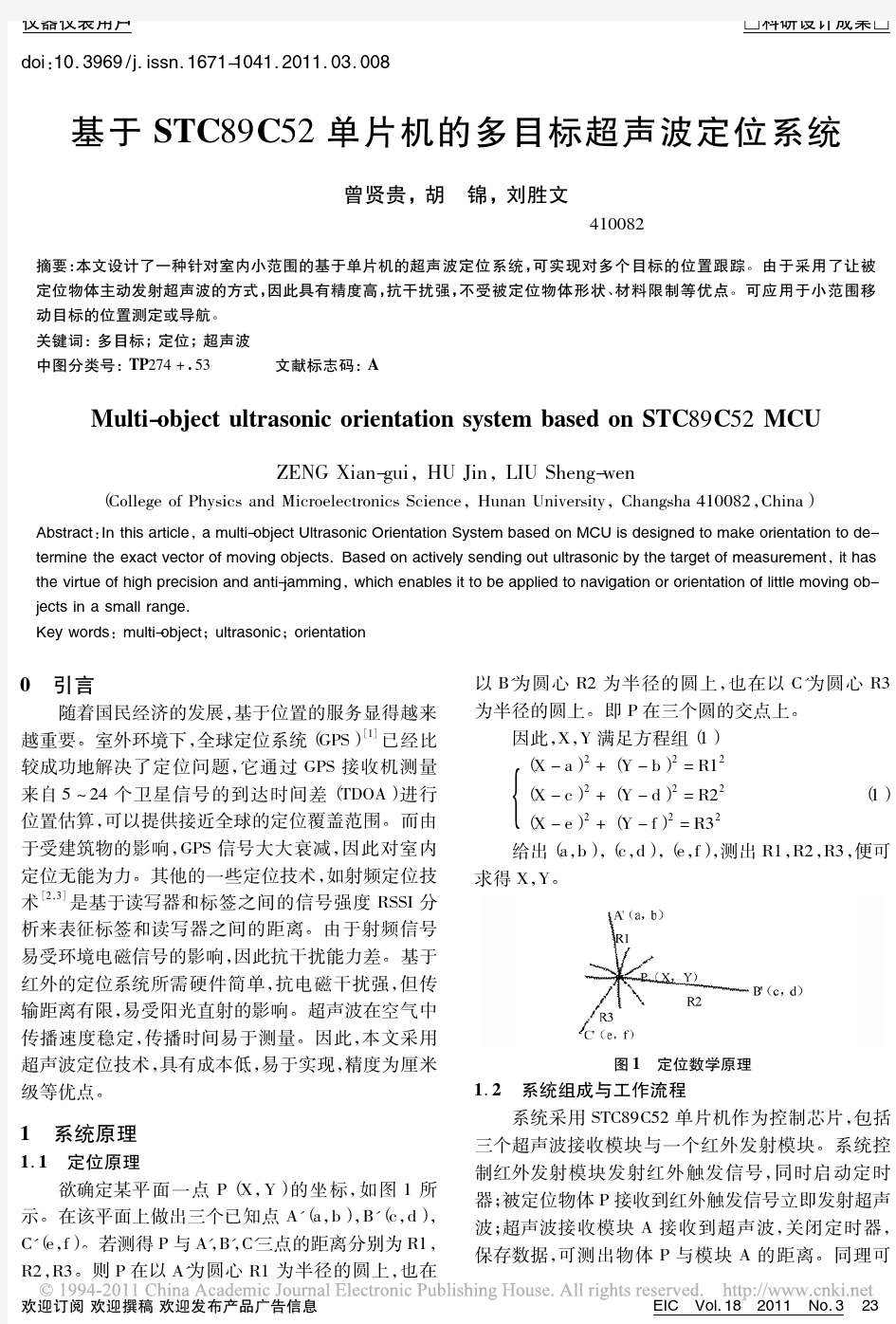
超声波定位系统的原理与应用 Pr i nc iple and Appl ica tion of Superson ic L oca tion Syste m ●王富东 W ang Fudong 1 基本原理 已经获得广泛应用的无线电定位系统的基本原理是通过接收几个固定位置的发射点的无线电波,从而得到主体到这几个发射点的距离,经计算后即可得到主体的位置。超声波定位的原理与此相仿,只不过由于超声波在空气中的衰减较大,它只适用于较小的范围。 超声波在空气中的传播距离一般只有几十米。短距离的超声波测距系统已经在实际中有所应用,测距精度为厘米级。超声波定位系统可用于无人车间等场所中的移动物体定位。其具体实现可有两种方案。 方案1:在三面有墙壁的场所,利用装在主体上的反射式测距系统可以测得主体到三面墙壁的距离。如果以三面墙壁的交点为原点建立直角坐标系,则可直接得到主体的三个直角坐标如图1所示 。 图1 利用三面垂直的墙壁进行定位 这种方案在实际应用中要受到某些限制。首先,超声波传感器必须与墙面基本保持垂直。其次墙壁表面必须平整,不能有凸出和凹进。传感器与墙壁之间也不能有其它物体。这 在很大程度上影响了其实际使用的效果。方案2:在空间的某些固定位置上设立超声波发射装置,主体上设立接收器(反之亦可)。分别测量主体到各发射点的距离,经过计算后便可得到主体的位置。由于超声波的传播具有一定的发散性及绕射作用,这种方法所受到的空间条件限制较少。即使在主体与发射点之间有障碍物,只要不完全阻断超声波的传播系统仍然可以工作。故本文重点介绍这种方法。发射点的位置通常按直角方位配置。以三维空间为例,可在坐标原点及(X ,0,0),(0,Y ,0)三个位置布置发射点如图2所示 。 图2 距离与坐标换算 主体坐标(x ,y ,z )到三个发射点的距离分别为L 1,L 2,L 3,由距离计算坐标的原理如下: 由图2可得如下三角关系: X 2+Y 2+Z 2=L 1 2 (1) (X -x )2+Y 2+Z 2=L 2 2 (2) X 2+(Y -y )2+Z 2=L 3 2 (3) 求解上列方程可得: x = (L 22-L 12+X 2) 2Y (4)王富东,现在苏州大学工学院工作。 地址:苏州市干将东路178号38信箱 邮政编码:215021收稿日期:1997年12月29日(磁盘来稿)
工厂人员定位系统 方案建议书
摘要 当前大型工厂制造企业,人员管理除考勤管理外主要依靠监管人员进行现场管理的方式,这种方式不但需要监管人员亲临现场,而且并不能从根本上解决人员管理问题,比如车间分布较分散,监管人员需要不断巡视各车间;人员较多时,并不能对每个人员起到监管作用。随着企业规模扩大,人员的增多,随之而来的是如何提高监管人员的工作效率,管理好每个人员,对企业管理来说至关重要。 针对工厂人员管理的难题,结合了ZigBee无线技术,开发出工厂人员定位系统,可以从根本上解决工厂人员管理的问题。系统不但解决了监管人员要到现场进行巡查的麻烦,并且能够解决对每个人的实时监管。监管人员只要坐在电脑旁,即可实现实时监控。系统不仅节省大量人力,而且极大的提高了工作效率。工厂人员定位系统还可以扩展工厂人员考勤系统,实现人员从上班打卡考勤到下班打卡考勤整个过程中的实时监控、历史信息查看,从而让管理者能够对人员在工作期间的活动情况一幕了然,当出现紧急情况时可立刻定位到人员,进行及时处理。 工厂人员定位系统是基于SQL大型数据库,在充分理解工厂人员管理的需求后,结合ZigBee技术,将原来的人员亲临现场管理变成智能化的系统监控管理。可解决人员管理难、工作效率低、无法实时监管到每个人、是否按时到岗、危险无法及时处理等问题,在很大程度上提高了企业的人员管理工作效率。
目录 1. 项目背景及意义 (1) 2. 需求分析 (2) 2.1. 人员定位系统的用户需求 (2) 2.2. 人员定位系统的功能性需求 (3) 2.3. 人员定位系统的非功能性需求 (4) 3. 系统总体设计 (5) 3.1. 系统示意图 (5) 3.2. 系统架构 (5) 3.3. 系统设计要点 (6) 4. 系统设计与实现 (6) 4.1. 系统主要功能 (6) 4.2. 系统特点 (13) 5. 系统设计方案 (14) 5.1. 设计原理 (14) 5.2. 定位原理 (14) 5.3. 设备布置规则 (15) 5.4. 路面定位示意图 (17) 5.5. 车间定位示意图 (17) 6. 系统技术规格 (18) 7. 系统组成 (20) 7.1. 系统拓补图 (20) 7.2. 主要设备 (20) 7.3. 系统软件 (31)
厂区人员定位系统解决方案 软件技术有限公司 2015-6
目录 1.项目背景及意义 (2) 1.1系统背景 (2) 1.2项目意义 (2) 2.系统介绍 (3) 2.1系统简介 (3) 2.2系统特点 (3) 3.系统介绍 (4) 3.1系统概述 (4) 3.2功能实现 (5) 3.2.1职工权限设定 (5) 3.2.2全程区域定位 (6) 3.2.3记录考勤 (7) 4.产品配置 (7) 4.1测温腕带电子标签 (7) 综合版防水读写器 (8) 4.3定向分析仪 (10) 4.4数据采集器 (11) 5结束语 (12)
1.项目背景及意义 1.1系统背景 工厂由于人员较多,管理方面存在一定难度,很容易产生管理漏洞,引发不必要的管理难题;此外,工厂本身也是易燃易爆地带,很容易发生危险,造成不可挽回的损失和后果;加之工厂规模较大,如果由于人员管理涣散导致问题的发生,也无从追究责任,使肇事者存在侥幸心理,不加注意,导致问题更加严重,工厂制度将难以得到完善。 1.2项目意义 我们从化工厂存在的实际人员管理问题角度出发,研发出RFID 工厂人员管理定位系统,此系统重点解决了工厂全体员工的管理问题,实现简单的人员区域定位,为管理人员带来便捷,同时可以解决工厂的众多管理问题,对工厂工人进行严格管理,减少意外发生,保障工人的安全,避免因意外给工厂带来的经济损失,提高工厂的名誉,为工厂带来更大的效益。
2.1系统简介 本系统是运用无线传感网络和RFID射频识别技术,通过安装RFID硬件和对应的功能软件,针对工厂人员管理的实际情况,开发的一套完整高效的智能化管理系统。 2.2系统特点 (1)RFID设备技术先进 RFID电子腕带技术可以透过外部材料读取数据;使用寿命长,能在恶劣环境下工作;读取距离更远;可以写入及存取数据,写入时间快;腕带的内容可以动态改变;能够同时处理多个标签;腕带的数据存取有密码保护,安全性更高;可以对腕带附着物体进行追踪定位。 (2)本系统具备较高的成熟度 具有低成本.低功耗.稳定性和保密性特点,可独立运行,不依赖于其他系统。充分考虑网络.主机.操作系统.数据库等的可靠性和安全性设计。 (3)良好的兼容和可扩展性 采用先进的计算机应用技术,具有良好的可扩充性。开放的体系结构和长远的生命周期,能满足以后开发新功能需要;系统通过GPRS 或者串口得来的数据,能和系统实现无缝隙连接。
基于单片机的超声波测距仪设计
基于单片机的超声波测距仪设计 1总体设计方案介绍 1.1超声波测距原理 发射器发出的超声波以速度υ在空气中传播,在到达被测物体时被反射返回,由接收器接收,其往返时间为t,由s=vt/2即可算出被测物体的距离。由于超声波也是一种声波,其声速v 与温度有关,下表列出了几种不同温度下的声速。在使用时,如果温度变化不大,则可认为声速是基本不变的。如果测距精度要求很高,则应通过温度补偿的方法加以校正。 表1-1 超声波波速与温度的关系表 表1-1 1.2超声波测距仪原理框图如下图 单片机发出40kHZ的信号,经放大后通过超声波发射器输出;超声波接收器将接收到的超声波信号经放大器放大,用锁相环电路进行检波处理后,启动单片机中断程序,测得时间为t,再由软件进行判别、计算,得出距离数并送LED
显示。 图1-1 超声波测距仪原理框图 2 系统的硬件结构设计 硬件电路的设计主要包括单片机系统及显示电路、超声波发射电路和超声波检测接收电路三部分。单片机采用AT89C51或其兼容系列。采用12MHz高精度的晶振,以获得较稳定时钟频率,减小测量误差。单片机用P1.0端口输出超声波换能器所需的40kHz的方波信号,利用外中断0口监测超声波接收电路输出的返回信号。显示电路采用简单实用的4位共阳LED数码管,段码用74LS244驱动,位码用PNP三极管8550驱动。 2.1 51系列单片机的功能特点及测距原理 2.1.1 51系列单片机的功能特点 5l系列单片机中典型芯片(AT89C51)采用40引脚双列直插封装(DIP)形式,内部由CPU,4kB的ROM,256 B的RAM,2个16b的定时/计数器TO和T1,4个8 b的工/O端I:IP0,
课程设计作品:超声波测距定位实验仪 一设计系统的目的用途及其主要功能: 超声波具有指向性强,能量消耗缓慢,传播距离较远等优点,所以,在利用传感器技术和自动控制技术相结合的测距方案中,超声波测距是目前应用最普遍的一种,它广泛应用于防盗、倒车雷达、水位测量、建筑施工工地以及一些工业现场。目前一般都采用波在介质传播速度和时间关系进行测量。常用的技术主要有激光测距、微波雷达测距超声波测距三种。激光测距。这是利用激光的单色性和相传播速度V易受空气中温度、湿度、压强等因素的影响,其中干性好、方向性强等特点,以实现高精度的计量和检测,如量长度、距离、速度、角度等等。手持式和便携式测距仪,作用距离为数百米至数十千米。一般应用到远距离测量。微波雷达测距是利用目标对电磁波反射来发现目标并测定其位置。根据微波雷达的用途不同,所测定的目标可能是飞机、导弹、车辆、建筑物、云雨等。微波测距一般应用于雷达系统,GPS定位系统。超声波测距就是利用其反射特性,超声波发生器不断地发射出40kHz超声波遇到障碍物后反射回反射波,超声波接收器接收到发射波信号,并将其转换为电信号。相比于其它定位技术超声波定位技术成本低,制作容易,非常适合于短距离测量定位。 本课程设计利用超声波发射与接收装置,实现超声波的测距功能,从而实现物体定位。 利用该设计,可以实现盲人导航系统的研究与应用,实现障碍物的定位测量等。
二硬件设计思想和电原理图 1、超声波发生器 为了研究和利用超声波,人们已经设计和制成了许多超声波发生器。总体上讲,超声波发生器可以分为两大类:一类是用电气方式产生超声波,一类是用机械方式产生超声波。 电气方式包括压电型、磁致伸缩型和电动型等;机械方式有加尔统笛、液哨和气流旋笛等。它们所产生的超声波的频率、功率和声波特性各不相同,因而用途也各不相同。目前较为常用的是压电式超声波发生器。 2、压电式超声波发生器原理 压电式超声波发生器实际上是利用压电晶体的谐振来工作的。它有两个压电晶片和一个共振板。当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,便产生超声波。反之,如果两电极间未外加电压,当共振板接收到超声波时,将压迫压电晶片作振动,将机械能转换为电信号,这时它就
基于STC89C52单片机的数字温度计 成员姓名:邹远淳徐冰孙顺新唐高峰 专业班级:自动化2班 指导教师:杨伟新
目录 摘要··················································P1 1绪论·················································P2 2系统组成及工作原理···································P3 2.1总体设计方案········································P3 2.2系统模块组成········································P3 3系统电路设计·········································P4 3.1 STC89C52单片机主控制器······························P4 3.2 LED数码管显示模块···································P5 3.3温度检测模块·········································P7 4系统软件设计·········································P8 5系统测试·············································P9 5.1主要指标测试·········································P9 5.2测试结果分析·········································P9 参考文献·················································P10 附录··················································P11
基于Wi-Fi实时定位技术 厂区人员车辆出入定位管理系统解决方案 江苏开拓信息与系统有限公司 2013年5月
目录 1引言 (3) 1.1文档说明 (3) 1.2术语与缩写解释 (3) 2项目需求 (4) 2.1项目背景 (4) 2.2需求分析 (4) 2.3方案优势 (4) 3方案设计 (5) 3.1设计理念 (5) 3.2功能描述 (6) 3.2.1定位监控 (6) 3.2.2标签管理 (7) 3.2.3报警管理 (7) 3.2.4系统管理 (8) 3.2.5扩展功能 (8) 3.2.6统计报表 (8) 4厂区内Wi-Fi无线定位监控通讯系统 (9) 4.1厂区人员定位考勤系统 (9) 4.2厂区车辆定位管理 (10) 4.3Wi-Fi无线语音数据通信系统及Wi-Fi手机定位系统 ......................................... 错误!未定义书签。 4.3.1Wi-Fi网络–数据传输、语音通信、无线视频............................................. 错误!未定义书签。 4.3.2无线语音功能模块............................................................................................. 错误!未定义书签。 4.3.3手机实时定位主要功能 ..................................................................................... 错误!未定义书签。5方案实施............................................................................................................................. 错误!未定义书签。 5.1网络部署设计........................................................................................................... 错误!未定义书签。 5.2网络安装................................................................................................................... 错误!未定义书签。 5.3实施计划................................................................................................................... 错误!未定义书签。 5.3.1实施说明............................................................................................................. 错误!未定义书签。 5.3.2施工进度安排..................................................................................................... 错误!未定义书签。
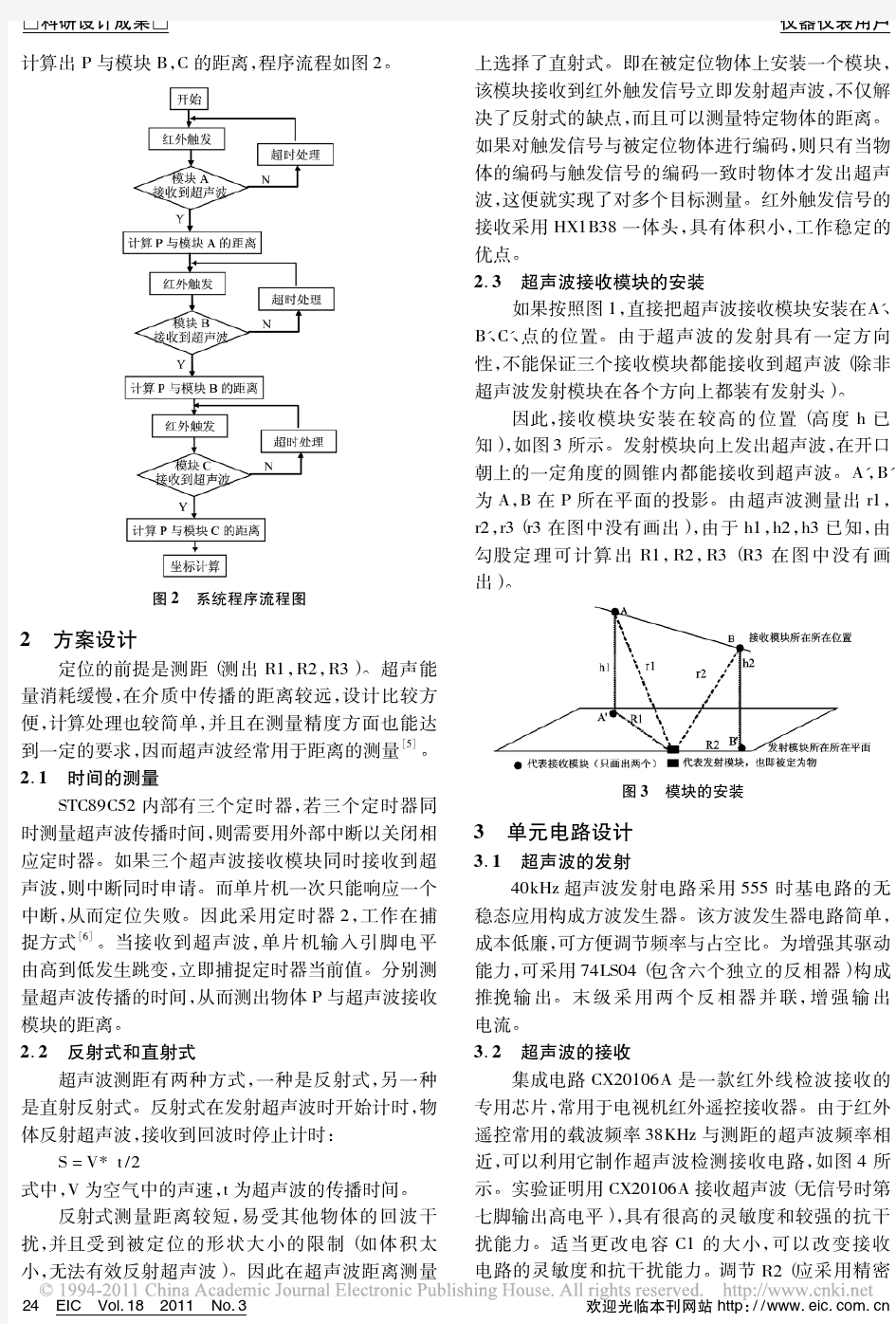
一设计要求 (1)设计一个以单片机为核心的超声波测距仪,可以应用于汽车倒车、工业现场的位置监控; (2)测量范围在0.50~4.00m,测量精度1cm; (3)测量时与被测物无直接接触,能够清晰稳定地显示测量结果。 二超声波测距系统电路总体设计方案 本系统硬件部分由AT89S52控制器、超声波发射电路及接收电路、温度测量电路、声音报警电路和LCD显示电路组成。汽车行进时LCD显示环境温度,当倒车时,发射和接收电路工作,经过AT89S52数据处理将距离也显示到LCD 上,如果距离小于设定值时,报警电路会鸣叫,提醒司机注意车距。超声波测距器的系统框图如下图所示: 图5 系统设计总框图 由单片机AT89S52编程产生10us以上的高电平,由指定引脚输出,就可以在指定接收口等待高电平输出。一旦有高电平输出,即在模块中经过放大电路,驱动超声波发射探头发射超声波。发射出去的超声波经障碍物反射回来后,由超声波接收头接收到信号,通过接收电路的处理,指定接收口即变为低电平,读取单片机中定时器的值。单片机利用声波的传播速度和发射脉冲到接收反射脉冲的
时间间隔计算出障碍物的距离,并由单片机控制显示出来。 由时序图可以看出,超声波测距模块的发射端在T0时刻发射方波,同时启动定时器开始计时,当收到回波后,产生一负跳变到单片机中断口,单片机响应中断程序,定时器停止计数。计算时间差,即可得到超声波在媒介中传播的时间t,由此便可计算出距离。 图6 时序图 三超声波发射和接收电路的设计 分立元件构成的发射和接收电路容易受到外界的干扰,体积和功耗也比较大。而集成电路构成的发射和接收电路具有调试简单,可靠性好,抗干扰能力强,体积小,功耗低的优点,所以优先采用集成电路来设计收发电路。 3.1 超声波发射电路 超声波发射电路包括超声波产生电路和超声波发射控制电路两部分,可采用软件发生法和硬件方法产生超声波。在超声波的发射电路的设计中,我们采用电路结构简单的集成电路构成发射电路:
地下管廊人员 定位系统 ***********有限公司 目录 1.前言 (3) 1、No table of contents entries found.前言 ************有限公司于2004年成立,作为专业视频传输设备制造厂商,致力于研究开发具有国际标准、高可用性、高品质的HTCview 系列高清传输和高清视频产品,积极与全国各大科研院校建立了技术
开发协作。 *************有限公司总部位于深圳,业务已在全国十几个省、市、自治区,为高速公路、城市交通、公安交警、监狱、海关、军队、石化、煤矿、水利、电力、机场、港口码头、教育、工厂等行业用户提供了专业化的视频监控设备和解决方案和成功案例。 ************有限公司是一家从事隧道人员定位系统、煤矿人员定位系统、厂区人员定位系统设备、地下综合管廊、矿用通信广播、安全监控系列产品研发、设计、生产、销售于一体的高新技术企业。 产品已通过国家公安部安全与警用电子产品监测中心和交通部国家交通安全设施质量监督检验中心(交通部交通工程监理检测中心)全面测试,在同行业处于领先地位。 ****在坚持自主品牌,坚持“快捷、创新、细节”的原则中获取客户的需求,满足客户需求。 2、环境介绍 城市综合管廊又称共同沟,它是实施统一规划、设计、施工和维护,建于城市地下用于敷设市政公用管线的市政公用设施,是指在城市地下用于集中敷设电力、通信、广播电视、给水、排水、热力、燃气等市政管线的公共隧道,设有专门的检修口、吊装口和监测系统,是保障城市运行的重要基础设施和“生命线”。 城市综合管廊避免了由于敷设和维修地下管线频繁挖掘道路而对交通和居民出行造成影响和干扰,综合管廊自动化控制系统是城市基础设施建
基于单片机的超声波测距系统的研究与设计 发表时间:2010-05-26T14:50:36.437Z 来源:《赤子》2010年第2期供稿作者:贾岩孙彩英 [导读] 随着汽车的日益普及,停车场越来越拥堵,车辆常常需要在停车场穿行,掉头或倒车 贾岩孙彩英(哈尔滨学院,黑龙江哈尔滨 150000) 摘要:简析超声波测踞原理,探讨基于单片机的超声波测距系统的研究与设计。 关键词:单片机;超声波;测距 随着汽车的日益普及,停车场越来越拥堵,车辆常常需要在停车场穿行,掉头或倒车。由于这些低速行驶的车辆与其他车辆非常的接近,司机的视野也颇受限制,碰撞与拖挂的事故经常发生,在夜间时则更加显著。为了确保汽车的安全,现介绍一种超声波测距离的报警装置,可有效的避免此类事故的发生。 1 超声波测距原理 超声波传感器分机械方式和电气方式两类,它实际上是一种换能器,在发射端它把电能或机械能转换成声能,接收端则反之。本次设计超声波传感器采用电气方式中的压电式超声波换能器,它是利用压电晶体的谐振来工作的。它有两个压电晶片和一个共振板。当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,产生超声波。反之,如果两电极间未外加电压,当共振板接收到超声波时,将压迫压电晶片作振动,将机械能转换为电信号,就成为超声波接收器。在超声波电路中,发射端输出一系列脉冲方波,脉冲宽度越大,输出的个数越多,能量越大,所能测的距离也越远。超声波发射换能器与接收换能器其结构上稍有不同,使用时应分清器件上的标志。 超声波测距的方法有多种:如往返时间检测法、相位检测法、声波幅值检测法。本设计采用往返时间检测法测距。其原理是超声波传感器发射一定频率的超声波,借助空气媒质传播,到达测量目标或障碍物后反射回来,经反射后由超声波接收器接收脉冲,其所经历的时间即往返时间,往返时间与超声波传播的路程的远近有关。测试传输时间可以得出距离。 假定s为被测物体到测距仪之间的距离,测得的时间为t/s,超声波传播速度为v/m·s-1表示,则有关系式(1) s=vt/2(1) 在精度要求较高的情况下,需要考虑温度对超声波传播速度的影响,按式(2)对超声波传播速度加以修正,以减小误差。 v=331.4+0.607T(2) 式中,T为实际温度单位为℃,v为超声波在介质中的传播速度单位为m/s。 2 系统结构 本系统由超声波发射、回波信号接收、温度测量、显示和报警、电源等硬件电路部分以及相应的软件部分构成。 3 超声波发射电路 在本系统中采用的超声传感器是一种开发型的,固有频率为40Khz。超声波发射电路如。 该电路采用由双非门组成的三点RC振荡电路,频率为40Khz,与非门A是超声波发射控制门,振荡器的振荡信号经4049放大后可直接推动超声波发射探头。二极管D1,D2起限制电压的作用,电容C1用于隔离直流。 4 超声波接收电路 超声波接收电路由以MC3403为核心的三级滤波放大电路和二极管的倍压稳流电路等组成。处理好的回波信号被送到ARM的A/D转换模块进行A/D采样,从而触发得到返回的时间。德州仪器公司的MC3403的具体引脚配置。 5 声光报警电路 声光报警电路AP8821来完成。AP8821是API型21秒一次性编程语音芯片。它具有高质量的录音功能,采用ADPCM制,声音信息存储在512K的EPROM中,6K取样频率能存储21秒的声音数据。AP8821避免采用复杂的电路,但是能录制出不同的声音。它的声音可以根据需要分14段录制,分段组合可达到长时间录音,效果并不是简单的音符曲调。而是极其逼真的话语或模拟声音。AP8821有两个PWM引脚,VOUT1与VOUT2直接驱动喇叭或蜂鸣器,电流输出引脚VOUT。通过一个NPN晶体管来驱动喇叭或蜂鸣器,不需要复杂的滤波和放大电路。具有自动平滑功能,在放音结束时消除噪音。 6 LCD显示部分 本设计显示部分采用字符型TC1602液晶显示所测距离值。TC1602显示的容量为2行16个字。液晶显示屏有微功耗、体积小、显示内容丰富、超薄轻巧、使用方便等诸多优点,与数码管相比,显得更专业、美观。 7 超声波汽车倒车防撞系统的软件设计 超声波传感器安装在汽车的尾部,其接收和发射传感器距离较近,之间容易有较强的干扰信号。为防止误测现象,在软件上采用延迟接收技术,一次提高系统的抗干扰能力。 系统软件设计采用模块化设计,主要包括主程序设计、T1中断服务子程序、INT0外部中断服务子程序、测温子程序、距离计算子程序、显示子程序、延时子程序和报警子程序设计等。 系统软件编制时应考虑相关硬件的连线,同时还要进行存储空间、寄存器以及定时器和外部中断引脚的分配和使用。定时器T1,T0均工作在工作方式1,为16位计数,T1定时器被用来开启一次测距过程以它的溢出为标志开始一个发射测量循环,T0定时器是用来计算脉冲往返时间,它们的初值均设为0。 系统初始化后就启动定时器T1从0开始计数,此时主程序进入等待,当到达65 ms时T1溢出进入T1中断服务子程序;在T1中断服务子程序中将启动一次新的超声波发射,同时开启定时器T0计时,为了避免直射波的绕射,需要延迟1 ms后再开INT0中断允许;INT0中断允许打开后,将提出中断请求进入INT0中断服务子程序,在INT0中断服务子程序中将停止定时器T0计时,读取定时器T0时间值到相应的存储区,同时设置接收成功标志;主程序一旦检测到接收成功标志,将调用测温子程序,采集超声波测距时的环境温度,并换算出准确的声速,存储到RAM存储单元中;单片机再调用距离计算子程序进行计算,计算出传感器到目标物体之间的距离;此后主程序调用显示子程序进行显示;若超过设定的最小报警距离还将启动扬声器报警;当一次发射、接收、显示的过程完成后,系统将延迟100ms重新让T1置初值,再次启动T1以溢出,进入下一次测距。如果由于障碍物过远,超出量程,以致在T0溢出时尚未接收到回波,则显示“ERROR”重新回到