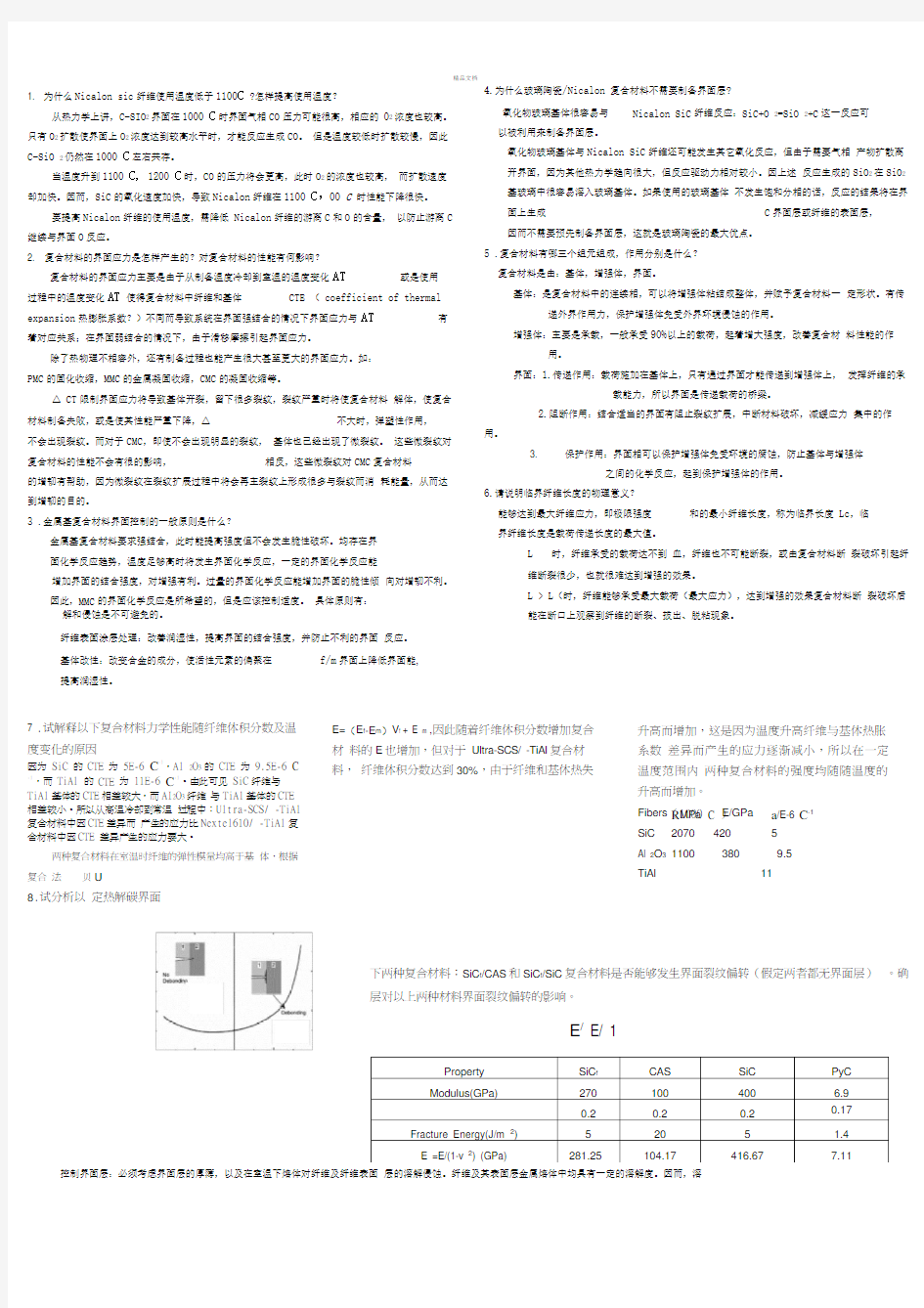
7 .试解释以下复合材料力学性能随纤维体积分数及温
度变化的原因
因为 SiC 的 CTE 为 5E-6 C -1
,Al 2O 3 的 CTE 为 9.5E-6 C
-1
,而 TiAl 的 CTE 为 11E-6 C -1
。由此可见 SiC 纤维与
TiAl 基体的CTE 相差较大,而AI 2O 3纤维 与TiAl 基体的CTE 相差较小。所以从高温冷却到常温 过程中:Ultra-SCS/ -TiAl 复合材料中因CTE 差异而 产生的应力比Nextel610/ -TiAl 复合材料中因CTE 差异产生的应力要大。
两种复合材料在室温时纤维的弹性模量均高于基 体,根据复合 法
贝U
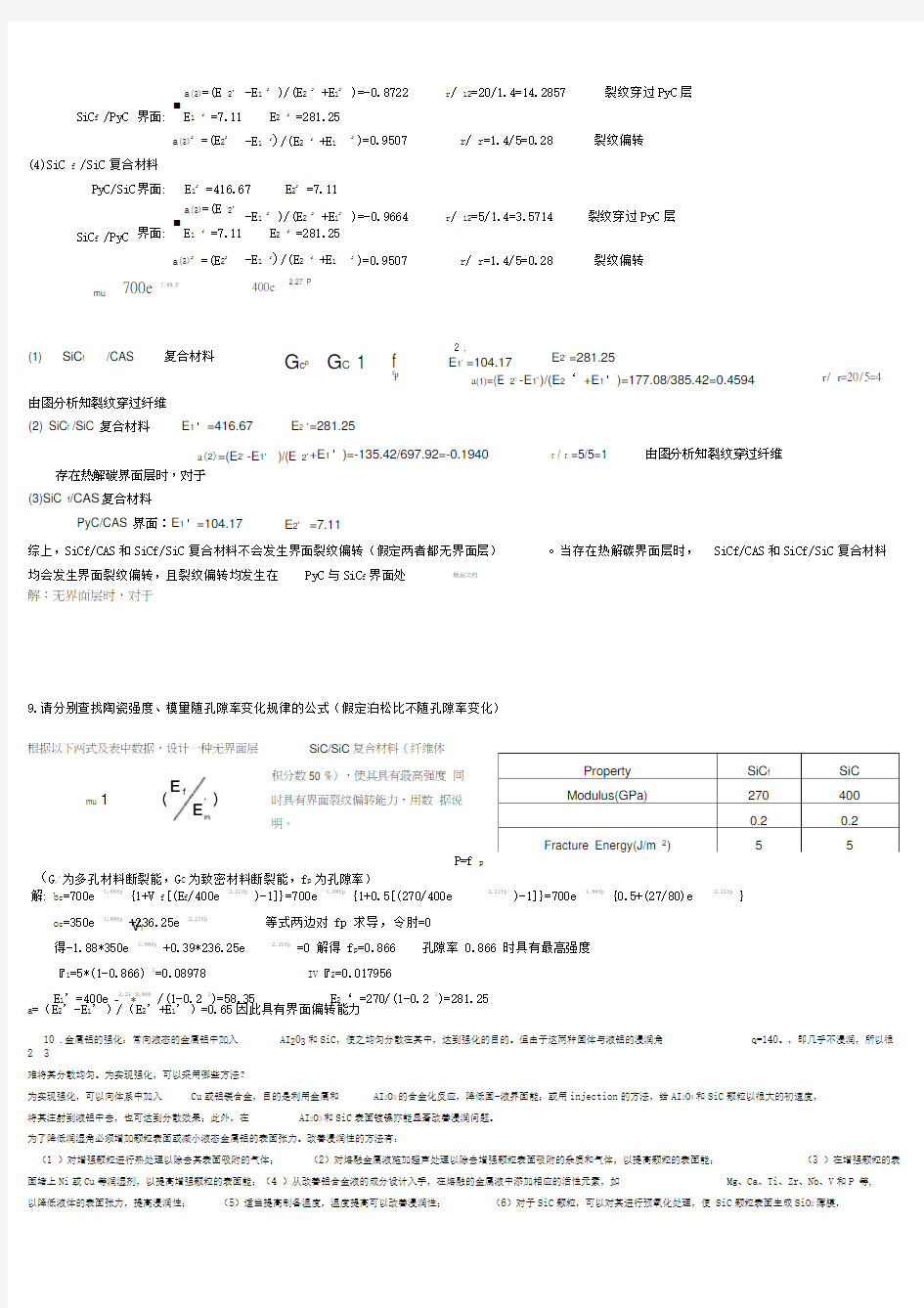
8.试分析以 定热解碳界面
E=(E f -E m )V f + E m ,因此随着纤维体积分数增加复合
材 料的E 也增加,但对于 Ultra-SCS/ -TiAl 复合材
料, 纤维体积分数达到30%,由于纤维和基体热失
升高而增加,这是因为温度升高纤维与基体热胀系数 差异而产生的应力逐渐减小,所以在一定温度范围内 两种复合材料的强度均随随温度的升高而增加。
(1000 C ) 下两种复合材料:SiC f /CAS 和SiC f /SiC 复合材料是否能够发生界面裂纹偏转(假定两者都无界面层) 。确 层对以上两种材料界面裂纹偏转的影响。
E / E/ 1
1. 为什么Nicalon sic 纤维使用温度低于1100C ?怎样提高使用温度?
从热力学上讲,C-SIO 2界面在1000 C 时界面气相CO 压力可能很高,相应的 02浓度也较高。只有O 2扩散使界面上O 2浓度达到较高水平时,才能反应生成CO 。 但是温度较低时扩散较慢,因此
C-SiO 2仍然在1000 C 左右共存。
当温度升到1100 C, 1200 C 时,CO 的压力将会更高,此时O 2的浓度也较高, 而扩散速度却加快。因而,SiC 的氧化速度加快,导致Nicalon 纤维在1100 C ,00 C 时性能下降很快。
要提高Nicalon 纤维的使用温度,需降低 Nicalon 纤维的游离C 和O 的含量, 以防止游离C 继续与界面O 反应。
2. 复合材料的界面应力是怎样产生的?对复合材料的性能有何影响?
复合材料的界面应力主要是由于从制备温度冷却到室温的温度变化AT 或是使用
过程中的温度变化AT 使得复合材料中纤维和基体
CTE ( coefficient of thermal
expansion 热膨胀系数?)不同而导致系统在界面强结合的情况下界面应力与AT
有
着对应关系;在界面弱结合的情况下,由于滑移摩擦引起界面应力。
除了热物理不相容外,还有制备过程也能产生很大甚至更大的界面应力。如:
PMC 的固化收缩,MMC 的金属凝固收缩,CMC 的凝固收缩等。
△ CT 限制界面应力将导致基体开裂,留下很多裂纹,裂纹严重时将使复合材料 解体,使复合材料制备失败,或是使其性能严重下降,△
不大时,弹塑性作用,
不会出现裂纹。而对于CMC ,即使不会出现明显的裂纹, 基体也已经出现了微裂纹。 这些微裂纹对复合材料的性能不会有很的影响,
相反,这些微裂纹对CMC 复合材料
的增韧有帮助,因为微裂纹在裂纹扩展过程中将会再主裂纹上形成很多与裂纹而消 耗能量,从而达到增韧的目的。
3 .金属基复合材料界面控制的一般原则是什么?
金属基复合材料要求强结合,此时能提高强度但不会发生脆性破坏。均存在界 面化学反应趋势,温度足够高时将发生界面化学反应,一定的界面化学反应能
增加界面的结合强度,对增强有利。过量的界面化学反应能增加界面的脆性倾 向对增韧不利。因此,MMC 的界面化学反应是所希望的,但是应该控制适度。 具体原则有: 解和侵蚀是不可避免的。
4.为什么玻璃陶瓷/Nicalon 复合材料不需要制备界面层?
氧化物玻璃基体很容易与 Nicalon SiC 纤维反应:SiC+O 2=SiO 2+C 这一反应可
以被利用来制备界面层。
氧化物玻璃基体与Nicalon SiC 纤维还可能发生其它氧化反应,但由于需要气相 产物扩散离开界面,因为其他热力学趋向很大,但反应驱动力相对较小。因上述 反应生成的SiO 2在SiO 2基玻璃中很容易溶入玻璃基体。如果使用的玻璃基体 不发生饱和分相的话,反应的结果将在界面上生成
C 界面层或纤维的表面层,
因而不需要预先制备界面层,这就是玻璃陶瓷的最大优点。
5 .复合材料有哪三个组元组成,作用分别是什么?
复合材料是由:基体,增强体,界面。
基体:是复合材料中的连续相,可以将增强体粘结成整体,并赋予复合材料一 定形状。有传
递外界作用力,保护增强体免受外界环境侵蚀的作用。
增强体:主要是承载,一般承受90%以上的载荷,起着增大强度,改善复合材 料性能的作
用。
界面:1.传递作用:载荷施加在基体上,只有通过界面才能传递到增强体上, 发挥纤维的承
载能力,所以界面是传递载荷的桥梁。
2.阻断作用:结合适当的界面有阻止裂纹扩展,中断材料破坏,减缓应力 集中的作
用。
3. 保护作用:界面相可以保护增强体免受环境的腐蚀,防止基体与增强体
之间的化学反应,起到保护增强体的作用。
6.请说明临界纤维长度的物理意义?
能够达到最大纤维应力,即极限强度 和的最小纤维长度,称为临界长度 Lc ,临
界纤维长度是载荷传递长度的最大值。
L 维断裂很少,也就很难达到增强的效果。 L > L (时,纤维能够承受最大载荷(最大应力),达到增强的效果复合材料断 裂破坏后 能在断口上观察到纤维的断裂、拔出、脱粘现象。 纤维表面涂层处理:改善润湿性,提高界面的结合强度,并防止不利的界面 反应。 基体改性:改变合金的成分,使活性元素的偏聚在 f/m 界面上降低界面能, 提高润湿性。 控制界面层:必须考虑界面层的厚薄,以及在室温下熔体对纤维及纤维表面 层的溶解侵蚀。纤维及其表面层金属熔体中均具有一定的溶解度。因而,溶 精品文档 Fibers R MPa E/GPa a /E-6 C -1 SiC 2070 420 5 Al 2O 3 1100 380 9.5 TiAl 11 Property SiC f CAS SiC PyC Modulus(GPa) 270 100 400 6.9 0.2 0.2 0.2 0.17 Fracture Energy(J/m 2) 5 20 5 1.4 E =E/(1-v 2) (GPa) 281.25 104.17 416.67 7.11 mu 700e 1.88 P 400e 2.27 P r / r =20/5=4 根据以下两式及表中数据,设计一种无界面层 SiC/SiC 复合材料(纤维体 mu 1 积分数50 %),使其具有最高强度 同 时具有界面裂纹偏转能力,用数 据说明。 a (3)=(E 2' ■ -E 1 ' )/(E 2 ' +E 1' )=-0.8722 r / 12=20/1.4=14.2857 裂纹穿过PyC 层 SiC f /PyC 界面: E 1‘ =7.11 E 2‘ =281.25 a (3)' =(E 2' -E 1‘)/(E 2‘ +E 1 ')=0.9507 r / r =1.4/5=0.28 裂纹偏转 (4)SiC f /SiC 复合材料 PyC/SiC 界面: E 1' =416.67 E 2' =7.11 a (3)=(E 2' ■ -E 1 ' )/(E 2 ' +E 1' )=-0.9664 r / 12=5/1.4=3.5714 裂纹穿过PyC 层 SiC f /PyC 界面: E 1‘ =7.11 E 2‘ =281.25 a (3)' =(E 2' -E 1‘)/(E 2‘ +E 1 ')=0.9507 r / r =1.4/5=0.28 裂纹偏转 综上,SiCf/CAS 和SiCf/SiC 复合材料不会发生界面裂纹偏转(假定两者都无界面层) 。当存在热解碳界面层时, SiCf/CAS 和SiCf/SiC 复合材料 均会发生界面裂纹偏转,且裂纹偏转均发生在 PyC 与SiC f 界面处 9.请分别查找陶瓷强度、模量随孔隙率变化规律的公式(假定泊松比不随孔隙率变化) P=f p (G c p 为多孔材料断裂能,G C 为致密材料断裂能,f p 为孔隙率) 解: b c =700e -1.88fp {1+V f [(E f /400e -2.27fp )-1]}=700e -1.88fp {1+0.5[(270/400e -2.27fp )-1]}=700e -1.88fp {0.5+(27/80)e -2.27fp } o c =350e -1.88fp +236.25e -2.27fp 等式两边对 fp 求导,令肘=0 得-1.88*350e -1.88fp +0.39*236.25e -2.27fp =0 解得 f p =0.866 孔隙率 0.866 时具有最高强度 『1=5*(1-0.866) 2=0.08978 IV 『2=0.017956 E 1' =400e -2.27*0.866 /(1-0.2 2)=58.35 E 2‘ =270/(1-0.2 2)=281.25 a =(E 2' -E 1' )/(E 2' +E 1' )=0.65因此具有界面偏转能力 10 .金属铝的强化:常向液态的金属铝中加入 AI 203和SiC ,使之均匀分散在其中,达到强化的目的。但由于这两种固体与液铝的浸润角 q=140。,即几乎不浸润,所以很 2 3 难将其分散均匀。为实现强化,可以采用哪些方法? 为实现强化,可以向体系中加入 Cu 或铝镁合金,目的是利用金属和 AI 2O 3的合金化反应,降低固-液界面能;或用injection 的方法,给AI 2O 3和SiC 颗粒以很大的初速度, 将其注射到液铝中去,也可达到分散效果;此外,在 AI 2O 3和SiC 表面镀镍亦能显著改善浸润问题。 为了降低润湿角必须增加颗粒表面或减小液态金属铝的表面张力。改善浸润性的方法有: (1 )对增强颗粒进行热处理以除去其表面吸附的气体; (2)对熔融金属液施加超声处理以除去增强颗粒表面吸附的杂质和气体,以提高颗粒的表面能; (3 )在增强颗粒的表 面堵上Ni 或Cu 等润湿剂,以提高增强颗粒的表面能;(4 )从改善铝合金液的成分设计入手,在熔融的金属液中添加相应的活性元素,如 Mg 、Ca 、Ti 、Zr 、Nb 、V 和P 等, 以降低液体的表面张力,提高浸润性; (5)适当提高制备温度,温度提高可以改善浸润性; (6)对于SiC 颗粒,可以对其进行预氧化处理,使 SiC 颗粒表面生成SiO 2薄膜, (1) SiC f /CAS 复合材料 G c p G C 1 2 , f E 1' =104.17 f P ,, E 2' =281.25 a (1)=(E 2' -E 1' )/(E 2‘ +E 1' )=177.08/385.42=0.4594 由图分析知裂纹穿过纤维 (2) SiC f /SiC 复合材料 E 1' =416.67 E 2 ' =281.25 a (2)=(E 2' -E 1' )/(E 2' +E 1' )=-135.42/697.92=-0.1940 r / r =5/5=1 由图分析知裂纹穿过纤维 存在热解碳界面层时,对于 (3)SiC f /CAS 复合材料 PyC/CAS 界面:E 1' =104.17 E 2' =7.11 Property SiC f SiC Modulus(GPa) 270 400 0.2 0.2 Fracture Energy(J/m 2) 5 5 精品文档 解:无界面层时,对于 V f 一、选择题(10小题,共10分) 6、产生式系统的推理不包括() A)正向推理B)逆向推理C)双向推理D)简单推理 8、在公式中?y?xp(x,y)),存在量词是在全称量词的辖域内,我们允许所存在的x可能 依赖于y值。令这种依赖关系明显地由函数所定义,它把每个y值映射到存在的那个x。 这种函数叫做() A) 依赖函数B) Skolem函数 C) 决定函数D) 多元函数 9、子句~P∨Q和P经过消解以后,得到() A) P B) ~P C) Q D) P∨Q 10、如果问题存在最优解,则下面几种搜索算法中,()必然可以得到该最优解。 A)宽度(广度)优先搜索B) 深度优先搜索 C) 有界深度优先搜索D) 启发式搜索 二、填空题(10个空,共10分) 1、化成子句形式为:~。 2、假言推理(A→B)∧A?B,假言三段论(A→B)∧(B→C)? A -> C. 3、在启发式搜索当中,通常用启发函数来表示启发性信息。 5、状态空间法三要点分别是:状态和算符,状态空间方法。 6. 鲁宾逊提出了⑦归结原理使机器定理证明成为可能。 7. 宽度优先搜索与深度优先搜索方法的一个致命的缺点是当问题比较复杂是可能会发 生组合爆炸。 8、产生式系统是由___综合数据库知识库___和_推理机________三部分组成的. 9、谓词公式G是不可满足的,当且仅当对所有的解释G都为假。 10、谓词公式与其子句集的关系是包含。 11、利用归结原理证明定理时,若得到的归结式为空集,则结论成立。 12、若C1=┐P∨Q,C2=P∨┐Q,则C1和C2的归结式R(C1,C2)= ┐P∨P或┐Q ∨Q。 13、在框架和语义网络两种知识表示方法中,框架适合于表示结构性强的知识,而 语义网络则适合表示一些复杂的关系和联系的知识。 三、简答题(4小题,共40分) 1.什么是A*算法的可纳性?(4分) 答:在搜索图存在从初始状态节点到目标状态节点解答路径的情况下,若一个搜索法总能找到最短(代价最小)的解答路径,则称算法具有可采纳性。 2.在一般图搜索算法中,当对某一个节点n进行扩展时,n的后继节点可分为三类,请举例说明对这三类节点的不同的处理方法。(8分) 1、针对下图所示得3个三角形元,写出用完整多项式描述得位移模式表达式。 2、如下图所示,求下列情况得带宽: a)4结点四边形元; b)2结点线性杆元。 3、对上题图诸结点制定一种结点编号得方法,使所得带宽更小。图左下角得四边形在两种不同编号方式下,单元得带宽分别就就是多大? 4、下图所示,若单元就就是2结点线性杆单元,勾画出组装总刚后总刚空间轮廓线。系统得带宽就就是多大?按一右一左重新编号(即6变成3等)后,重复以上运算。 5、设杆件1-2受轴向力作用,截面积为A,长度为L,弹性模量为E,试写出 杆端力F 1,F 2 与杆端位移之间得关系式,并求出杆件得单元刚度矩阵 6、设阶梯形杆件由两个等截面杆件错误!与错误!所组成,试写出三个结点1、2、 3得结点轴向力F 1,F 2 ,F 3 与结点轴向位移之间得整体刚度矩阵[K]。 7、在上题得阶梯形杆件中,设结点3为固定端,结点1作用轴向载荷F 1 =P,求各结点得轴向位移与各杆得轴力。 8、下图所示为平面桁架中得任一单元,为局部坐标系,x,y为总体坐标系,轴与x轴得夹角为。 (1) 求在局部坐标系中得单元刚度矩阵 (2)求单元得坐标转换矩阵 [T]; (3) 求在总体坐标系中得单元刚度矩阵 9、如图所示一个直角三角形桁架,已知,两个直角边长度,各杆截面面积,求整体刚度矩阵[K]。 10、设上题中得桁架得支承情况与载荷情况如下图所示,按有限元素法求出各结点得位移与各杆得内力。 11、进行结点编号时,如果把所有固定端处得结点编在最后,那么在引入边界条件时就就是否会更简便些? 12、针对下图所示得3结点三角形单元,同一网格得两种不同得编号方式,单元得带宽分别就就是多大? 第四章 平面机构的力分析 题4-7 机械效益Δ是衡量机构力放大程度的一个重要指标,其定义为在不考虑摩擦的条件下机构的输出力(力矩)与输入力(力矩)之比值,即Δ=d r d r F F M M //=。试求图示各机构在图示位置时的机械效益。图a 所示为一铆钉机,图b 为一小型压力机,图c 为一剪刀。计算所需各尺寸从图中量取。 (a ) (b) (c) 解:(a)作铆钉机的机构运动简图及受力 见下图(a ) 由构件3的力平衡条件有:02343=++R R r F F F 由构件1的力平衡条件有:04121 =++d R R 按上面两式作力的多边形见图(b )得 θcot ==?d r F F (b )作压力机的机构运动简图及受力图见(c ) 由滑块5的力平衡条件有:04565=++R R F F G 由构件2的力平衡条件有:0123242 =++R R R 其中 5442R R = 按上面两式作力的多边形见图(d ),得t F G = ? (c) 对A 点取矩时有 b F a F d r ?=? a b =? 其中a 、b 为F r 、F d 两力距离A 点的力臂。t F G = ? (d) (a) (b)d r R41 F R43 F d G 题4-8 在图示的曲柄滑块机构中,设已知l AB=0.1m,l BC=0.33m,n1=1500r/min(为常数),活塞及其附件的重量G3=21N,连杆质量G2=25N,J S2=0.0425kg·m2,连杆质心S2至曲柄销B的距离l BS2=l BC/3。试确定在图示位置时活塞的惯性力以及连杆的总惯性力。 解:1) 选定比例尺, 绘制机构运动简图。(图(a) ) 2(b) 4-1 (c) 3) 确定惯性力 活塞3 连杆2 (顺时针) (图(a) ) 2003西北工业大学程序设计选拔赛 上机竞赛题 注:本次竞赛机试共8题,时间为4小时,答题多者获胜;若题数相同,按时间先后排序。 可以查阅文字资料,但禁止使用电子资料;违者取消比赛资格。 一.矩阵乘法 问题描述: 对给定的两个“实数”矩阵,输出它们的乘积。 例如:若输入??????654321和?? ?? ? ?????121110987654321,应输出?? ????0.1280.1130.980.830.560.500.440.38。 输入输出: 输入文件包括多组测试用例,以“0 0 0”标志文件结束,该行无需处理。 每个测试用例第一行为三个正整数k n m ,,(101≤≤k n m ,,),表示以下m 行为一个n m ?的矩阵 A ,再接下来的n 行为k n ?的矩阵 B 。每行各元素间用一个空格隔开。 输出矩阵A 与矩阵B 的乘积B A C ?=。C 中元素一律“四舍五入”保留一位小数。 每个测试用例之间输出一个空行。 二.混合排序 问题描述: 完成对单词和数字的混合排序。输入文件中给出若干序列,其中包含有单词和数字。你的任务就是对这些序列完成排序(单词按词典序排列,不区分大小写;数字按从小到大的顺序排列)。要求:如果序列中某元素是单词,则排序后的序列中此位置仍为单词,数字仍为数字。 输入输出: 输入文件包括多组测试用例,每个测试用例占一行,以“.”标志文件结束,该行无需处理。 输入文件每行为一个序列。序列中的每个元素(单词或数字)以逗号加空格隔开,序列以句号结束。 输出排序后的序列,序列的每个元素以逗号加空格隔开,序列以句号结束,每个序列占一行。 三.数字河 问题描述: 数字河中的一个数n 的后继数是n 加上其每位数字的和。例如,12345的后继数是12360,因为12345+1+2+3+4+5=12360。如果数字河的第一个数为k ,我们就称此数字河为river k 。例如,river 480 代表序列{480, 492, 507, 519, ...},river 483 代表序列{483, 498, 519, ...}。 当两个数字河有相同的元素时,我们称这两个数字河在此元素处相遇。例如,river 480 和river 483 在元素519处相遇。所有数字河都会和river 1, river 3 或river 9 相遇。编程计算给定的数字河最先与以上三条河流中的哪一条相遇,在何元素处相遇? 输入输出: 输入文件包括多组测试用例,每个测试用例占一行,以“0”标志文件结束,该行无需处理。 每行给定一个整数n ,163841≤≤n ,即river n 。 对于每个测试用例输出两行,第一行为测试用例号,第二行输出“first meets river x at y ”。其中,y 表示river n 最先遇到的river x 中的最小元素值(x = 1,3,9)。 示例输入 示例输出 117 52 0 Case #1 first meets river 9 at 117 Case #2 first meets river 1 at 107 四.盘子问题 问题描述: 有m 个白色盘子和n 个黑色盘子放置在一个带有转动器的椭圆形的轨道上。现在能对这些盘子进行“旋转”和“顺时针移动”两种操作,如图1所示: 图1 两种合法的操作 我们的目标是“反复使用以上两种操作把相同颜色的盘子放在相临的位子上”。即如图2所示: 图2 我们的目标 1.针对下图所示的3个三角形元,写出用完整多项式描述的位移模式表达式。 2.如下图所示,求下列情况的带宽: a) 4结点四边形元; b) 2结点线性杆元。 3.对上题图诸结点制定一种结点编号的方法,使所得带宽更小。图左下角的四边形在两种不同编号方式下,单元的带宽分别是多大? 4.下图所示,若单元是2结点线性杆单元,勾画出组装总刚后总刚空间轮廓线。系统的带宽是多大?按一右一左重新编号(即6变成3等)后,重复以上运算。 5. 设杆件1-2受轴向力作用,截面积为A ,长度为L ,弹性模量为E ,试写出杆端力F 1,F 2与杆端位移21,u u 之间的关系式,并求出杆件的单元刚度矩阵)(][e k 6.设阶梯形杆件由两个等截面杆件○ 1与○2所组成,试写出三个结点1、2、3的结点轴向力F 1,F 2,F 3与结点轴向位移321,,u u u 之间的整体刚度矩阵[K]。 7. 在上题的阶梯形杆件中,设结点3为固定端,结点1作用轴向载荷F 1=P ,求各结点的轴向位移和各杆的轴力。 8. 下图所示为平面桁架中的任一单元,y x ,为局部坐标系,x ,y 为总体坐标系,x 轴与x 轴的夹角为θ。 (1) 求在局部坐标系中的单元刚度矩阵 )(][e k (2) 求单元的坐标转换矩阵 [T]; (3) 求在总体坐标系中的单元刚度矩阵 )(][e k 9.如图所示一个直角三角形桁架,已知27/103cm N E ?=,两个直角边长度cm l 100=,各杆截面面积210cm A =,求整体刚度矩阵[K]。 10. 设上题中的桁架的支承情况和载荷情况如下图所示,按有限元素法求出各结点的位移与各杆的内力。 11. 进行结点编号时,如果把所有固定端处的结点编在最后,那么在引入边界条件时是否会更简便些? 12. 针对下图所示的3结点三角形单元,同一网格的两种不同的编号方式,单元的带宽分别是多大? 13. 下图所示一个矩形单元,边长分别为2a 与2b ,坐标原点取在单元中心。 第3章课后习题参考答案 3—1 何谓速度瞬心?相对瞬心与绝对瞬心有何异同点? 答:参考教材30~31页。 3—2 何谓三心定理?何种情况下的瞬心需用三心定理来确定? 答:参考教材31页。 3-3试求图示各机构在图示位置时全部瞬心的位置(用符号P,,直接标注在图上) (a) (b) 答: 答: (10分) (d) (10分) 3-4标出图示的齿轮一连杆组合机构中所有瞬心,并用瞬心法求齿轮1与齿轮3的传动比ω1/ω3。 答:1)瞬新的数目: K=N(N-1)/2=6(6-1)/2=15 2)为求ω1/ω3需求3个瞬心P 16、P 36、P 13的位置 3) ω1/ω3= P 36P 13/P 16P 13=DK/AK 由构件1、3在K 点的速度方向相同,可知ω3与ω1同向。 3-6在图示的四杆机构中,L AB =60mm ,L CD =90mm,L AD =L BC =120mm, ω2=10rad/s,试用瞬心法求: 1)当φ=165°时,点的速度vc ; 2)当φ=165°时,构件3的BC 线上速度最小的一点E 的位置及速度的大小; 3)当V C =0时,φ角之值(有两个解)。 解:1)以选定的比例尺μ机械运动简图(图b ) 2)求vc 定出瞬心p12的位置(图b ) 因p 13为构件3的绝对瞬心,则有 ω3=v B /lBp 13=ω2l AB /μl .Bp 13=10×0.06/0.003× v c =μc p 13ω3=0.003×52×2.56=0.4(m/s) 3)定出构件3的BC 线上速度最小的点线上速度最小的点必与p13点的距离 最近,故丛p13引BC 线的垂线交于点 v E =μl.p 13E ω3=0.003×46.5× xx学校 2012—2013学年度第二学期期末试卷 考试课程:《人工智能》考核类型:考试A卷 考试形式:开卷出卷教师: 考试专业:考试班级: 一单项选择题(每小题2分,共10分) 1.首次提出“人工智能”是在(D )年 A.1946 B.1960 C.1916 D.1956 2. 人工智能应用研究的两个最重要最广泛领域为:B A.专家系统、自动规划 B. 专家系统、机器学习 C. 机器学习、智能控制 D. 机器学习、自然语言理解 3. 下列不是知识表示法的是 A 。 A:计算机表示法B:“与/或”图表示法 C:状态空间表示法D:产生式规则表示法 4. 下列关于不确定性知识描述错误的是 C 。 A:不确定性知识是不可以精确表示的 B:专家知识通常属于不确定性知识 C:不确定性知识是经过处理过的知识 D:不确定性知识的事实与结论的关系不是简单的“是”或“不是”。 5. 下图是一个迷宫,S0是入口,S g是出口,把入口作为初始节点,出口作为目标节点,通道作为分支,画出从入口S0出发,寻找出口Sg的状态树。根据深度优先搜索方法搜索的路径是 C 。 A:s0-s4-s5-s6-s9-sg B:s0-s4-s1-s2-s3-s6-s9-sg C:s0-s4-s1-s2-s3-s5-s6-s8-s9-sg D:s0-s4-s7-s5-s6-s9-sg 二填空题(每空2分,共20分) 1.目前人工智能的主要学派有三家:符号主义、进化主义和连接主义。 2. 问题的状态空间包含三种说明的集合,初始状态集合S 、操作符集合F以及目标 状态集合G 。 3、启发式搜索中,利用一些线索来帮助足迹选择搜索方向,这些线索称为启发式(Heuristic)信息。 4、计算智能是人工智能研究的新内容,涉及神经计算、模糊计算和进化计算等。 5、不确定性推理主要有两种不确定性,即关于结论的不确定性和关于证据的不确 定性。 三名称解释(每词4分,共20分) 人工智能专家系统遗传算法机器学习数据挖掘 答:(1)人工智能 人工智能(Artificial Intelligence) ,英文缩写为AI。它是研究、开发用于模拟、延伸和扩展人的智能的理论、方法、技术及应用系统的一门新的技术科学。人工智能是计算机科学的一个分支,它企图了解智能的实质,并生产出一种新的能以人类智能相似的方式做出反应的智能机器,该领域的研究包括机器人、语言识别、图像识别、自然语言处理和专家系统等 (2)专家系统 专家系统是一个含有大量的某个领域专家水平的知识与经验智能计算机程序系统,能够利用人类专家的知识和解决问题的方法来处理该领域问题.简而言之,专家系统是一种模拟人类专家解决领域问题的计算机程序系统 (3)遗传算法 遗传算法是一种以“电子束搜索”特点抑制搜索空间的计算量爆炸的搜索方法,它能以解空间的多点充分搜索,运用基因算法,反复交叉,以突变方式的操作,模拟事物内部多样性和对环境变化的高度适应性,其特点是操作性强,并能同时避免陷入局部极小点,使问题快速地全局收敛,是一类能将多个信息全局利用的自律分散系统。运用遗传算法(GA)等进化方法制成的可进化硬件(EHW),可产生超出现有模型的技术综合及设计者能力的新颖电路,特别是GA独特的全局优化性能,使其自学习、自适应、自组织、自进化能力获得更充分的发挥,为在无人空间场所进行自动综合、扩展大规模并行处理(MPP)以及实时、灵活地配置、调用基于EPGA的函数级EHW,解决多维空间中不确定性的复杂问题开通了航向 (4)机器学习 机器学习(Machine Learning)是一门多领域交叉学科,涉及概率论、统计学、逼近论、凸分析、算法复杂度理论等多门学科。专门研究计算机怎样模拟或实现人类的学习行为,以获取新的知识或技能,重新组织已有的知识结构使之不断改善自身的性能。它是人工智能的核心,是使计算机具有智能的根本途径,其应用遍及人工智能的各个领域,它主要使用归纳、综合而不是演绎 (5)数据挖掘 数据挖掘是指从数据集合中自动抽取隐藏在数据中的那些有用信息的非平凡过程,这些信息的表现形式为:规则、概念、规律及模式等。它可帮助决策者分析历史数据及当前数据,并从中发现隐藏的关系和模式,进而预测未来可能发生的行为。数据挖掘的 在平面三结点三角形单元中的位移、应变和应力具有什么特征? 在平面四结点单元中,位移模式能否取为: (1) 2 872 65243221),(),(y xy x y x v y xy x y x u αααααααα+++=+++= (2)2 876524321),(),(y y x y x v x y x y x u αααααααα+++=+++= 试写出下列单元的位移模式,并求出其形函数矩阵[]N 设图 所示三结点轴力杆件单元 ijm 的位移函数为2 321)(x x x u ααα++=,该位移函数是否满足收敛准则? 求出其形函数矩阵[]N 。 i EA j )(ξx 在1–2 图1–2所示平面三角形桁架,结点坐标为:1(0,0),2(2l ,2l ),3(l 2,0),E 、A 为弹性模量及截 面积。用有限元素法求: (1)结点位移; (2)元素内力; (3)支座反力; 图1–2 1–5 用有限元素法对结构问题进行静力分析中,协调条件、平衡条件、以及物理关系是如何体现的? 3–12 有中心椭球孔的矩形板,两个侧边受线性分布的侧压p ,如图3–12所示。如何利用对称面条件减少求解的工作量,并画出计算模型,列出计算步骤。(5.5) 3–13 高度为h 、宽度为a 9的矩形板,2/h 高度上有3个尺寸相同的矩形孔 (如图3–13所示),侧面受线性分布侧压。如何利用其自身的几何特点减少计算工作量,并画出计算模型、列出计算步骤。(5.6) 4–1 三结点三角形元素ijm 的位移函数能否选为: (1) ()()2 6543221,,y a x a a y x v y a x a a y x u ++=++= (2) ()()2 652 423221,,y a xy a x a y x v y a xy a x a y x u ++=++= 4–2 推导三结点平板元素在局部坐标系xoy 中的元素刚度矩阵? 4–3 正方形平板,厚度为t ,边长为a ,弹性模量E ,材料泊桑比μ,载荷P ,按图4–3所示分元,求1、3点的位移? 4–4 图4–4所示的矩形板1234,分成四个常应变三角形元素 (1)形成这些元素集合的刚度矩阵? 图4– 2 图4–3 第三章 平面机构的运动分析 题3-3 试求图示各机构在图示位置时全部瞬心的位置(用符号P ij 直接标注在图上) 解: 1 P 13(P 34)13 ∞ 题3-4 在图示在齿轮-连杆机构中,试用瞬心法求齿轮1与齿轮3 的传动比w1/w3. P 13 P 23 P 36 3 D 6 52 C 4 B P 16A 1 P 12 解:1)计算此机构所有瞬心的数目 152 ) 1(=-=N N K 2)为求传动比31ωω需求出如下三个瞬心16P 、36P 、13P 如图3-2所示。 3)传动比31ω计算公式为: 13 1613 3631P P P P =ωω 题3-6在图a 所示的四杆机构中,l AB =60mm ,l CD =90mm ,l AD =l BC =120mm ,ω2=10rad/s ,试用瞬心法求: 23 1) 当φ=165°时,点C 的速度Vc ; 2) 当φ=165°时,构件3的BC 线上速度最小的一点E 的位置及速度的大小; 3) 当Vc=0时,φ角之值(有两个解) 解:1) 以选定比例尺,绘制机构运动简图。(图3-3 ) 2)求V C ,定出瞬心P 13的位置。如图3-3(a ) s rad BP l l v l AB AB B 56.213 23=== μωω s m CP v l C 4.0313==ωμ 3)定出构件3的BC 线上速度最小的点E 的位置。 因为BC 线上速度最小的点必与P 13点的距离最近,所以过P 13点引BC 线延长线的垂线交于E 点。如图3-3(a ) s m EP v l E 375.0313==ωμ 4)当0=C v 时,P 13与C 点重合,即AB 与BC 共线有两个位置。作出0=C v 的两个位置。 量得 ?=4.261φ ?=6.2262φ 题3-12 在图示的各机构中,设已知各构件的尺寸、原动件1以等角速度ω1顺时针方向转动。试用图解法求机构在图示位置时构件3上C 点的速度及加速度。 西北工业大学考试试题(A卷) 2004 - 2005 学年第一学期 一、填空题:(每题 3 分,共计 30 分) 1. 塑性是指: ________________________________________________________ ________________________________________________ 。 2. 金属的超塑性可分为 _____ 超塑性和 _____ 超塑性两大类。 3. 金属单晶体变形的两种主要方式有: _____ 和 _____ 。 4. 影响金属塑性的主要因素有: _____ , _____ , _____ , _____ , _____ 。 5. 等效应力表达__________________________________________________ 。 6. 常用的摩擦条件及其数学表达式: __________________________________ ,__________________________________ 。 7. π平面是指: _____________________________________________________ ______________________________________________________________ _。 8. 一点的代数值最大的 __________ 的指向称为第一主方向,由第一主方 向顺时针转所得滑移线即为 _____线。 9. 平面变形问题中与变形平面垂直方向的应力σz=______________________ 10. 在有限元法中:应力矩阵 [S]= ________________________ , 单元内部各点位移{U}=[ ]{ } 二、简答题(共计 30 分) 1. 提高金属塑性的主要途径有哪些?( 8 分) 2. 纯剪切应力状态有何特点?( 6 分) 3. 塑性变形时应力应变关系的特点?( 8 分) 4. Levy-Mises 理论的基本假设是什么?( 8 分) 三、计算题(共计 40 分) 1 、已知金属变形体内一点的应力张量为Mpa ,求:( 18 分)(1)计算方向余弦为 l=1/ 2 , m=1/2 , n= 的斜截面上的正应力大小。(2)应力偏张量和应力球张量; 第四章 平面机构的力分析 题4-7 机械效益Δ是衡量机构力放大程度的一个重要指标,其定义为在不考虑摩擦的条件下机构的输出力(力矩)与输入力(力矩)之比值,即Δ=d r d r F F M M //=。试求图示各机构在图示位置时的机械效益。图a 所示为一铆钉机,图b 为一小型压力机,图c 为一剪刀。计算所需各尺寸从图中量取。 (a ) (b) (c) 解:(a)作铆钉机的机构运动简图及受力 见下图(a ) 由构件3的力平衡条件有:02343=++R R r F F F 由构件1的力平衡条件有:04121 =++d R R 按上面两式作力的多边形见图(b )得 θcot ==?d r F F (b )作压力机的机构运动简图及受力图见(c ) 由滑块5的力平衡条件有:04565=++R R F F G 由构件2的力平衡条件有:0123242 =++R R R 其中 5442R R = 按上面两式作力的多边形见图(d ),得t F G = ? (c) 对A 点取矩时有 b F a F d r ?=? a b =? 其中a 、b 为F r 、F d 两力距离A 点的力臂。t F G = ? (d) (a)(b) d r R41 F R43 F d G 题4-8 在图示的曲柄滑块机构中,设已知l AB=0.1m,l BC=0.33m,n1=1500r/min(为常数),活塞及其附件的重量G3=21N,连杆质量G2=25N,J S2=0.0425kg·m2,连杆质心S2至曲柄销B的距离l BS2=l BC/3。试确定在图示位置时活塞的惯性力以及连杆的总惯性力。 解:1) 选定比例尺, mm m l 005 .0 = μ绘制机构运动简图。(图(a) ) 2)运动分析:以比例尺vμ作速度多边形,如图(b) 以比例尺 a μ作加速度多边形如图4-1 (c) 2 44 . 23 s m c p a a C ='' =μ2 2 2 2100 s m s p a a S = '' =μ 2 2 2 1 5150 s BC c n l a l a BC t B C= '' = = μ μ α 3) 确定惯性力 活塞3:) ( 3767 3 3 3 3 N a g G a m F C S I = - = - =方向与c p''相反。 连杆2:) ( 5357 2 2 2 2 32 N a g G a m F S S I = - = - =方向与 2 s p'相反。 ) (8. 218 2 2 2 m N J M S I ? = - =α(顺时针) 总惯性力:) ( 5357 2 2 N F F I I = = ') ( 04 .0 2 2 2 m F M l I I h = =(图(a) ) 1.针对下图所示的 3 个三角形元,写出用完整多项式描述的位移模式表达式。 2.如下图所示,求下列情况的带宽: a) 4 结点四边形元; b) 2 结点线性杆元。 3. 对上题图诸结点制定一种结点编号的方法,使所得带宽更小。图左下角的四 边形在两种不同编号方式下,单元的带宽分别是多大? 4. 下图所示,若单元是2 结点线性杆单元,勾画出组装总刚后总刚空间轮廓线。系统的带宽是多大?按一右一左重新编号(即 6 变成3 等)后,重复以上运算。 5. 设杆件 1-2 受轴向力作用,截面积为 A ,长度为 L ,弹性模量为 E ,试写 出杆端力 F 1 ,F 2 与杆端位移 u 1 , u 2 之间的关系式,并求出杆件的单元刚度矩阵 [ k ] (e) 6. 设 阶 梯形杆件由两个等截面杆件○ 2所组成,试写出三个结点 1、2、3 的结 点轴向力 F 1,F 2,F 3 与结点轴向位移 u 1 , u 2 , u 3 之间的整体刚度矩阵 [K]。 7. 在上题的阶梯形杆件中,设结点 3 为固定端,结点 1 作用轴向载荷 F 1 =P , 求各结点的轴向位移和各杆的轴力。 8. 下图所示为平面桁架中的任一单元,x, y 为局部坐标系,x,y 为总体坐标系,x 轴与x 轴的夹角为。 (1)求在局部坐标系中的单元刚度矩阵[ k ] (e) (2)求单元的坐标转换矩阵[T]; (3)求在总体坐标系中的单元刚度矩阵[k ] (e) 9. .如图所示一个直角三角形桁架,已 E 3 10 7 N / cm 2 ,两个直角边长度 知 l 100cm ,各杆截面面积 A 10cm2 ,求整体刚度矩阵[K]。 1.针对下图所示的3个三角形元,写出用完整多项式描述的位移模式表达式。 2.如下图所示,求下列情况的带宽: a)4结点四边形元; b)2结点线性杆元。 3、对上题图诸结点制定一种结点编号的方法,使所得带宽更小。图左下角的四边形在两种不同编号方式下,单元的带宽分别就是多大? 4、下图所示,若单元就是2结点线性杆单元,勾画出组装总刚后总刚空间轮廓线。系统的带宽就是多大?按一右一左重新编号(即6变成3等)后,重复以上运算。 5. 设杆件1-2受轴向力作用,截面积为A,长度为L,弹性模量为E,试写出杆端力F1,F 2与杆端位移21,u u 之间的关系式,并求出杆件的单元刚度矩阵)(][e k 6、设阶梯形杆件由两个等截面杆件\o \a c(○,1)与错误!所组成,试写出三个结点1、2、3的结点轴向力F 1,F 2,F3与结点轴向位移321,,u u u 之间的整体刚度矩阵[K]。 7. 在上题的阶梯形杆件中,设结点3为固定端,结点1作用轴向载荷F 1=P,求各结点的轴向位移与各杆的轴力。 8、 下图所示为平面桁架中的任一单元,y x ,为局部坐标系,x,y 为总体坐标系,x 轴与x 轴的夹角为 。 (1) 求在局部坐标系中的单元刚度矩阵 )(][e k (2) 求单元的坐标转换矩阵 [T]; (3) 求在总体坐标系中的单元刚度矩阵 )(][e k 9.如图所示一个直角三角形桁架,已知27/103cm N E ?=,两个直角边长度cm l 100=,各杆截面面积210cm A =,求整体刚度矩阵[K ] 。 10. 设上题中的桁架的支承情况与载荷情况如下图所示,按有限元素法求出各结点的位移与各杆的内力。 1—1填空题: 1.机械是机器和机构的总称。 机械原理课程的研究内容是有关机械的基本理论问题。 2.各种机构都是用来传递与变换运动和力的可动的装置。 如:齿轮机构、连杆机构、凸轮机构等。 3.凡用来完成有用功的机器是工作机。 如:机床、起重机、纺织机等。 凡将其它形式的能量转换为机械能的机器是原动机。 如:电动机、蒸气机、内燃机等。 4.在机器中,零件是制造的单元,构件是运动的单元。 5.机器中的构件可以是单一的零件,也可以是由多个零件装配成的刚性结构。 在机械原理课程中,我们将构件作为研究的基本单元。 6.两个构件直接接触形成的可动联接称为运动副。 7.面接触的运动副称为低副,如移动副、转动副等。 点或面接触的运动副称为高副,如凸轮副、齿轮副等。 8.构件通过运动副的连接而构成的可相对运动的系统是运动链,若组成运动链的各构件构成首尾封闭的系统称为闭链,若未构成首尾封闭的系统称为开链。 9.在运动链中,如果将其中一个构件固定而成为机架,则该运动链便成为机构。10.平面机构是指组成机构的各个构件均在同一个平面上运动。 11.在平面机构中,平面低副提供 2 个约束,平面高副提供 1 个约束。12.机构具有确定运动时所必须给定的独立运动参数的数目称为机构的自由度。13.机构具有确定运动的条件是机构的原动件数目应等于机构的自由度的数目。1—2试画出图示平面机构的机构示意图,并计算自由度(步骤:1)列出完整公式,2) 带入数据,3)写出结果)。其中: 图a) 唧筒机构――用于水井的半自动汲水机构。图中水管4直通水下,当使用者来回摆动手柄2时,活塞3将上下移动,从而汲出井水。 解:自由度计算:画出机构示意图: n= 3 p L= 4 p H= 0 p'= 0 F'= 0 F=3n-(2p l+p h-p′)-F′ = 3×3-(2×4+0-0)-0 = 1 图b) 缝纫机针杆机构原动件1绕铰链A作整周转动,使得滑块2沿滑槽滑动,同时针杆作上下移动,完成缝线动作。 解:自由度计算:画出机构示意图: n= 3 p L= 4 p H= 0 p'= 0 F'= 0 F=3n-(2p l+p h-p′)-F′ = 3×3-(2×4+0-0)-0 = 1 1—3试绘出图a)所示偏心回转油泵机构的运动简图(各部分尺寸由图中直接量观察方向 3 2 4 1 4 3 2 1 第二章 机构的结构分析 题2-11 图a 所示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。 解:1)取比例尺,绘制机构运动简图。(图2-11a) 2)要分析是否能实现设计意图,首先要计算机构的自由度。尽管此机构有4个活动件,但齿轮1和凸轮2是固装在轴A 上,只能作为一个活动件,故 3=n 3=l p 1=h p 01423323=-?-?=--=h l p p n F 原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。 分析:因构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架。故需增加构件的自由度。 3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。 (1) 在构件3、4之间加一连杆及一个转动副(图2-11b)。 (2) 在构件3、4之间加一滑块及一个移动副(图2-11c)。 (3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-11d)。 1 1 (c) 题2-11 (d) 5 4 3 6 4 (a) 5 3 2 5 2 1 5 43 6 4 2 6 (b) 3 2 1 讨论:增加机构自由度的方法一般是在适当位置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b )(c )所示,这样就相当于给机构增加了一个自由度。用一个高副代替一个低副也可以增加机构自由度,如图2-1(d )所示。 题2-12 图a 所示为一小型压力机。图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。试绘制其机构运动简图,并计算自由度。 解:分析机构的组成: 此机构由偏心轮1’(与齿轮1固结)、连杆2、滑杆3、摆杆4、齿轮5、滚子6、滑块7、冲头8和机架9组成。偏心轮1’与机架9、连杆2与滑杆3、滑杆3与摆杆4、摆杆4与滚子6、齿轮5 2002-2003 第一学期 一.计算及推导( 5*8) 1.已知 x* 3.141, x ,试确定 x * 近似 x 的有效数字位数。 * * * 0.100 * * * 2.有效数 x 1 3.105, x 2 0.001, x 3 1 x 2 3 ,试确定 x x 的相对误差限。 3.已知 f ( x) 0.5 x 3 0.1x 2 ,试计算差商 f 0,1,2,3 4.给出拟合三点 A (0,1), B (1,0) 和 C (1,1) 的直线方程。 5.推导中矩形求积公式 b (b a) f ( a b ) 1 f '' ( )(b a)3 f (x)dx a 2 24 b n f (x)dx A i f ( x i ) a 6.试证明插值型求积公式 i 0 的代数精确度至少是 n 次。 7.已知非线性方程 x f (x) 在区间 a, b 内有一实根,试写出该实根的牛顿迭代 公式。 8.用三角分解法求解线性方程组 1 2 1 x 1 0 2 2 3 x 2 3 1 3 0 x 3 2 二.给出下列函数值表 0.4 0.5 0.6 0.7 0.8 x i 0.38942 0.47943 0.56464 0.64422 0.71736 f ( x i ) 要用二次插值多项式计算 f (0.63891) 的近似值,试选择合适的插值节点进行计 算,并说明所选用节点依据。 (保留 5 位有效数字)(12 分) 三. 已知方程 x ln x 0 在 (0,1) 内有一实根 ( 1)给出求该实根的一个迭代公式,试之对任意的初始近似 x 0 (0,1) 迭代法都收 敛,并证明其收敛性。 ( 2) x 0 0.5 试用构造的迭代公式计算 的近似值 x n ,要求 x n x n 1 10 3 。 四. 设有方程组 第9章课后参考答案 9-1何谓凸轮机构传动中的刚性冲击和柔性冲击?试补全图示各段s v一、一曲线,并指出哪些地方有刚性冲击,哪些地方有柔性冲击? 答凸轮机构传动中的刚性冲击是指理论上无穷大的惯性力瞬问作用到构件上,使构件产生强烈的冲击;而柔性冲击是指理论上有限大的惯性力瞬间作用到构件上,使构件产生的冲击。 s-S , v-S , a-S曲线见图。在图9-1中B,C处有刚性冲击,在0, A,D,E处有柔性冲击。 9—2何谓凸轮工作廓线的变尖现象和推杆运动的失真现象?它对凸轮机构的工作有何影响?如何加以避免? 答在用包络的方法确定凸轮的工作廓线时,凸轮的工作廓线出现尖点的现象称为变尖现象:凸轮的工作廓线使推杆不能实现预期的运动规律的现象件为失真现象。变尖的工作廓线极易磨损,使推杆运动失真.使推杆运动规律达不到设计要求,因此应设法避免。变尖和失真现象可通过增大凸轮的基圆半径.减小滚子半 题9-1图 径以及修改推杆的运动规律等方法来避免。 9—3力封闭与几何封闭凸轮机构的许用压力角的确定是否一样?为什么?答力封闭与几何封闭凸轮机沟的许用压力角的确定是不一样的。因为在回程阶 段-对于力封闭的凸轮饥构,由于这时使推杆运动的不是凸轮对推杆的作用力F,而是推杆所受的封闭力.其不存在自锁的同题,故允许采用较大的压力角。但为?4^ y 5 J 曲 使推秆与凸轮之间的作用力不致过大。也需限定较大的许用压力角。而对于几何形状封闭的凸轮机构,则需要考虑自锁的问题。许用压力角相对就小一些。 9—4 一滚子推杆盘形凸轮机构,在使用中发现推杆滚子的直径偏小,欲改用较大的滚子?问是否可行?为什么? 答不可行。因为滚子半径增大后。凸轮的理论廓线改变了.推杆的运动规律也势必发生变化。 9—5 一对心直动推杆盘形凸轮机构,在使用中发现推程压力角稍偏大,拟采用推杆偏置的办法来改善,问是否可行?为什么? 答不可行。因为推杆偏置的大小、方向的改变会直接影响推杆的运动规律. 而原凸轮机构推杆的运动规律应该是不允许擅自改动的。 9-6 在图示机构中,哪个是正偏置?哪个是负偏置?根据式(9-24)说明偏置方向对凸轮机构压力角有何影响? S 9-6 答由凸轮的回转中心作推杆轴线的垂线?得垂足点,若凸轮在垂足点的速度沿推杆的推程方向?刚凸轮机构为正偏置?反之为负偏置。由此可知?在图示机沟中,两个均为正偏置。由 , ds/d me tan J(r0 e2) s 可知.在其他条件不变的情况下。若为正偏置(e前取减号).由于推程时(ds/d S )为正.式中分子ds/d5 -evds/d S ,故压力角a减小。而回程时,由于ds/d S 为负,式中分子为 |(ds/d S )-e|=| (ds/d S ) |+ |e| >ds/d S。故压力角增大。负偏置时刚相反,即正偏置会使推程压力角减小,回程压力角增大;负偏置会使推程压力角增大,回程压力角减小。9—7试标出题9—6a图在图示位置时凸轮机构的压力角,凸轮从图示位置转过90。后推杆的位移;并标出题9—6b图推杆从图示位置升高位移s时,凸轮的转角和凸轮机构的压力角。 解如图(a)所示,用直线连接圆盘凸轮圆心A和滚子中心B,则直线AB与推杆导路之间所夹的锐角为图示位置时凸轮机构的压力角。以A为圆心,AB为半径作圆,得凸轮的理论廓线圆。连接A与凸轮的转动中心O并延长,交于凸轮的理论廓线于C点。以O 为圆心.以OC为半径作圆得凸轮的基圆。以O为圆心,以O点到推杆导路的距离OD 为半径作圆得推杆的偏距圆;。延长推杆导路线交基圆于G-点,以直线连接0G。过0点作0G的垂线,交基圆于E点。过E 点在偏距圆的下侧作切线?切点为H点?交理论廓线于F点,则线段EF的长即为凸轮从图示位置转过90后推杆的位移s。 本科生期末试卷一 一.选择题(每小题1分,共10分) 1.计算机系统中的存贮器系统是指______。 A RAM存贮器 B ROM存贮器 C 主存贮器 D 主存贮器和外存贮器 2.某机字长32位,其中1位符号位,31位表示尾数。若用定点小数表示,则最大正小数为______。 A +(1 – 2-32) B +(1 – 2-31) C 2-32 D 2-31 3.算术/ 逻辑运算单元74181ALU可完成______。 A 16种算术运算功能 B 16种逻辑运算功能 C 16种算术运算功能和16种逻辑运算功能 D 4位乘法运算和除法运算功能 4.存储单元是指______。 A 存放一个二进制信息位的存贮元 B 存放一个机器字的所有存贮元集合 C 存放一个字节的所有存贮元集合 D 存放两个字节的所有存贮元集合; 5.相联存贮器是按______进行寻址的存贮器。 A 地址方式 B 堆栈方式 C 内容指定方式 D 地址方式与堆栈方式 6.变址寻址方式中,操作数的有效地址等于______。 A 基值寄存器内容加上形式地址(位移量) B 堆栈指示器内容加上形式地址(位移量) C 变址寄存器内容加上形式地址(位移量) D 程序记数器内容加上形式地址(位移量) 7.以下叙述中正确描述的句子是:______。 A 同一个CPU周期中,可以并行执行的微操作叫相容性微操作 B 同一个CPU周期中,不可以并行执行的微操作叫相容性微操作 C 同一个CPU周期中,可以并行执行的微操作叫相斥性微操作 D 同一个CPU周期中,不可以并行执行的微操作叫相斥性微操作 8.计算机使用总线结构的主要优点是便于实现积木化,同时______。 A 减少了信息传输量 B 提高了信息传输的速度 C 减少了信息传输线的条数 D 加重了CPU的工作量 9.带有处理器的设备一般称为______设备。 A 智能化 B 交互式 C 远程通信 D 过程控制 10.某中断系统中,每抽取一个输入数据就要中断CPU一次,中断处理程序接收取样的数据,并将其保存到主存缓冲区内。该中断处理需要X秒。另一方面,缓冲区内每存储N西工大计算智能化试题(卷)
西工大-有限元试题(附答案)
西北工业大学机械原理课后答案第4章
西工大机试试题
西工大有限元试题(附答案)
西北工业大学机械原理课后答案第3章
人工智能期末试题及答案完整版
西工大2003年硕士研究生入学有限元试题A-有限元
西北工业大学机械原理课后答案第3章-1
西工大试题
西北工业大学机械原理课后答案第4章
西工大有限元试题(附答案)
西工大有限元试题附答案68872
西北工业大学机械原理习题答案教材
西北工业大学机械原理课后答案第2章
(完整word版)西工大计算方法试题参考(完整版).docx
西北工业大学机械原理课后第9篇
计算机组成原理模拟试题及答案西工大
相关主题
文本预览