
第十一章 齿轮系及其设计
题11-1如图所示为一手摇提升装置,其中各轮齿数均已知,试求传动比i 15,并指出当提升重物时手柄的转向(在图中用箭头标出)。
解: 此轮系为空间定轴轮系
78
.57718115205240305043215
43215=??????=
='
''z z z z z z z z i
题11-2如图所示为一滚齿机工作台传动机构,工作台与涡轮5固联。若已知z 1=z 1′=15,z 2=35,z 4′=1(右旋),z 5=40,滚刀z 6=1(左旋),z 7=28。今要切制一个齿数z 5′=64的齿轮,应如何选配挂轮组的齿数z 2′、z 3和z 4。
解:由范成原理,滚刀6与轮坯5’的角速度比应为646
55656==='
''z z i ωω 转向如图。 这一角速度比由滚齿机工作台的传动系统来保证。
5624
2442175421155011528403515''
''''=?=?????==i z z z z z z z z z z z z i 转向如图
可求得
25
32
52=
z z 至于Z 3为惰轮,其齿数可根据中心距A 24的需要确定。
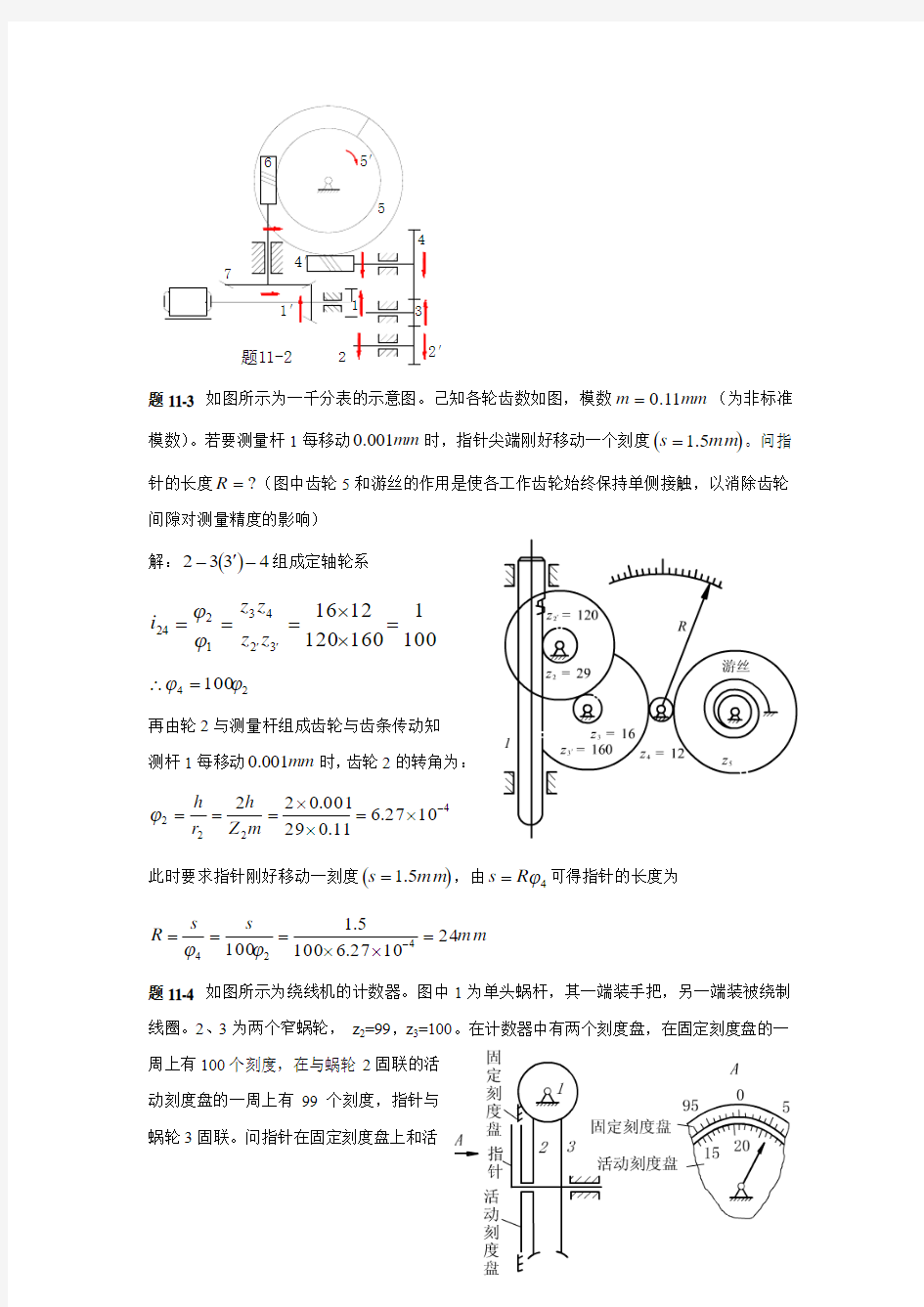
题11-3 如图所示为一千分表的示意图。己知各轮齿数如图,模数mm m 11.0=(为非标准模数)。若要测量杆1每移动mm 001.0时,指针尖端刚好移动一个刻度()mm s 5.1=。问指针的长度?=R (图中齿轮5和游丝的作用是使各工作齿轮始终保持单侧接触,以消除齿轮间隙对测量精度的影响) 解:()4332-'-组成定轴轮系
100
1160120121632431224=??===''z z z z i ??
24100??=∴
再由轮2与测量杆组成齿轮与齿条传动知 测杆1每移动mm 001.0时,齿轮2的转角为:
42221027.611
.029001
.022-?=??===
m Z h r h ? 此时要求指针刚好移动一刻度()mm s 5.1=,由4?R s =可得指针的长度为
mm s s
R 2410
27.61005
.11004
24
=??==
=
-?? 题11-4 如图所示为绕线机的计数器。图中1为单头蜗杆,其一端装手把,另一端装被绕制线圈。2、3为两个窄蜗轮, z 2=99,z 3=100。在计数器中有两个刻度盘,在固定刻度盘的一周上有100个刻度,在与蜗轮2固联的活动刻度盘的一周上有99个刻度,指针与蜗轮3固联。问指针在固定刻度盘上和活
动刻度盘上每一格读数各代表绕制线圈的匝数是多少?又在图示情况下,线圈己绕制了多少匝?
解: 1)固定刻度盘上读数 因 1001
3
3113===
z z n n i 故 100
1
3n n =
即蜗杆每转一转,蜗轮3转过 100
1
转,指针相对固定刻度盘转过一个
刻度,固定刻度盘的一周上有100个刻度,说明指针在固定刻度盘上的每一格读数代表被绕制线圈绕了一匝。 2)活动刻度盘上读数 991
2
2112===
z z n n i 故 9912n n = 即蜗杆每转一转,蜗轮2转过 991 转,由于蜗
轮2、3转向相同,故蜗杆每转一转,指针相对活动刻度盘转过
9900
1
9911001-=- 转。(即相对向后倒转,所以活动刻度盘的增大方向与固定刻度盘的相反。)因活动刻度盘上有99个刻度,故指针在活动刻度盘上的每一格读数代表被绕制线圈己绕制了
10099
9900
=匝。 3)今指针在活动刻度盘上读数为??.13 ,在固定刻度盘上读数为?.5 ,所以线圈己绕制的匝数为:
匝固定刻度盘上的度数活动刻度盘上的度数1305510013100=+?=+?
题11-5 图 a 、b 所示为两个不同的圆锥齿轮周转轮系,已知201=z ,242=z ,302='z ,
403=z ,min 2001r n =,min 1003r n -=。求两轮系?=H n
解:1)图a :差动轮系
6.130
2040
2421323113=??='=--=
z z z z n n n n i H H H
()min 60016.12001006.11
131313r i n n i n H H
H -=---?=--=
2)图b :差动轮系
6.12
1323113-='-=--=
z z z z n n n n i H H
H
()min 385.1516.12001006.11
131313r i n n i n H H H =----?-=--=
根据上述汁算结果,请回答下列问题:
1.在周转轮系的转化轮系中构件的转向是由 画箭头 方法确定的,而在周转轮系中构件的转向是由 周转轮系传动比计算公式的结果 确定的。
2.在图a 中,表示构件1、3转向的箭头方向相同,而题中给定n 1与n 3的方向相反,这不矛盾吗?答:不矛盾。因为图中箭头所示为构件在 转化轮系中 的转向,而不是构件在 实际周转轮系中 的转向。
由计算 min 80011r n n n H H =-=(图a ); min 615.18411r n n n H H =-= (图b )
m i n 50033r n n n H H =-=(图a )min 385.11533r n n n H H
-=-=(图b ) 可见,在图a 中H
n 1与H n 3 同 向,与图中箭头所示方向 相同 ; 在图b 中H n 1与H n 3 反 向,与图中箭头所示方向 相同 ;
3)由演算结果可见,若转化轮系传动比的“±”判断错误,不仅会影响到 周转轮系传动比大小 ,还会影响到 周转轮系中构件转向 。
题11-6 图示为纺织机中的差动轮系,设z 1=30,z 2=25,z 3=z 4=24,z 5=18,z 6=121,n 1=48~200r/min ,n H =316r/min ,求n 6=?
解:此差动轮系的转化轮系的传动比为:
()6.518
24301211425153164226116=????=-=--=
z z z z
z z n n n n i H H H
()H
H H n n n i n +-=116
61
200~481=n 时
,
()()29.295~14.2683163162006
.51
~316316486.516=+-+-=n 6n 与1n 及H n 转向相同。
题11-7 图示为手动起重葫芦,已知z 1=z 2′=10,z 2=20,z 3=40,传动总效率η=0.9,为提升重G=10kN 的重物,求必须施加于链轮A 上的圆周力F 。 解:此轮系为行星轮系
91010402011122324
134114=??+=???? ??'
--=-==
z z z z i i ωω 因为 14
1416040Pi Q
M M P Q ==
ωωη
所以
64.3089
9.0410000
414=??==
i Q P η
故提升10000N 的重物,必需施加于链轮A 上的园周力P 为308.64N 。
题11-8图示为建筑用铰车的行星齿轮减速器。已知z 1=z 3=17,z 2=z 4=39,z 5=18,z 7=152,n 1=1450r/min 。当制动器B 制动,A 放松时,鼓轮H 回转(当制动器B 放松、A 制动时,鼓轮H 静止,齿轮7空转),求n H 。
解:制动B 时为行星轮系
()44
.4518
171715239391111653176421
17
1=????+=?
??
? ??--=-=z z z z z z z z i i H H
91.3144
.45145011===H H i n n
题11-9 在图示的电动三爪卡盘转动轮系中,设已知各轮齿数为z 1=6,z 2=z 2′=25,z 3=57,z 4=56,试求传动比i 14。
解:区分轮系:H ---321为行星轮系、()H --'-3224为行星轮系。
()H --'-3221为差动轮系。而只有两个轮系是独立的,为
求解简单,选两个行星轮系求解。 H ---321为行星轮系
5.106
57
11113131=+=+
=-=z z i i H
H ()H --'-4224为行星轮系
56
1
25565725111243243
4-=??-='-=-=z z z z i i H
H
()588565.104114-=-?==
H
H
i i i n 1与n 4转向相反。 题11-10 如图所示为一装配用电动螺丝刀齿轮减速部分的传动简图。已知各轮齿数为z 1=z 4=7,z 3=z 6=39,若n 1=3000r/min ,试求螺丝刀的转速。
解:区分轮系:1321H ---为行星轮系、2654H ---为行星轮系、
1321H ---行星轮系中
7
391111313
11
1+=+=-=z z i
i H H
2654H ---行星轮系中
7
391114646
42
2+=+=-=z z i
i H H
18.4373912
4112
12=???
?
?+=?=H H H i i i
故5.6918
.433000
2
211==
=H H i n n 转向与1n 相同。
题11-11在图示的复合轮系中,设已知n 1=3549r/min ,又各轮齿数为z 1=36,z 2=60,z 3=23,z 4=49,z 4′=49,z 5=31,z 6=131,z 7=94,z 8=36,z 9=167,试求行星架H 的转速n H (大小及转向) 解:该复合轮系由1、2(3)、4定轴轮系和
7654---'行星轮系及H ---987行星轮
系组成。
1、2(3)、4定轴轮系中
551.323
3649
60314214=??==
z z z z i 7654---'行星轮系中
899.269
1311114676
474=+=+=-='''z z i
i
H ---987行星轮系中
777.294
16711179797=+=+
=-=z z i i H
H 587.28777.2899.2551.3774141=??=??='H H i i i i
15.124587
.283549
11===
H H i n n 转向与4n 相同。
题11-12在图示的轮系中,设各轮的模数均相同,且为标准传动,若已知齿数z 1=z 2′=z 3′ =z 6′=20,z 2=z 4=z 6=z 7=40,试问:
1)当把齿轮1作为原动件时,该机构是否具有确定的运动?
2)齿轮3、5的齿数应如何确定?
3)当齿轮1的转速n 1=980r/min 时,齿轮3及齿轮5的运动情况如何?
解:1.计算机构自由度
7=n 7=l p 8=h p 虚约束2='p 局部自由度 0='F
10)2872(73)2(3=--+?-?='-'-+-=F p p p n F h l
因此机构有确定的相对运动。
2.确定齿数 : 根据同心条件,可得
802040202213=++='++=z z z z 10040220243
5=?+=+'=z z z 3.计算齿轮3、5的转速:
1)图示轮系为 封闭 轮系,在作运动分析时应划分为如下 两 部分来计算。 2)在()53221--'-差动轮系中,有如下计算式
8202050
402
1325351513-=??-='-=--=
z z z z n n n n i (a )
3)在543--'定轴轮系中,有如下计算式
4)l 联立式(a)\(b) ,得
min 2049
98049
1
5r n n ===
100205553-=?-=-=n n
故min 1003r n -=其转向与1n 反向;min 205r n =其转向与1n 同向。
题11-13 在图示的2K – H 型轮系中,已知中心轮1的齿数561=z ,行星轮的内齿圈2'的齿数602='z ,其外齿圈2的齿数882=z ,设各对齿轮的啮合效率均为0.98(包括轴承效率),当由行星架H 输入功率为8kW 时,试求输出功率。(齿轮传动为标准传动) 解:1)确定轮3齿数
925688601223=-+=-+'=z z z z
2) 确定传动比
3243
.81
1201
.08856926011111213213
1-==-=??-='-=-=H
H H
H i i z z z z i i 3)确定转化轮系效率
9604.098.02231213==?=H
H H ηηη
4) 确定轮系效率 ()[]
13.01111
13
1
1=--+=
H
H H i ηη
5) 确定输出功率 84.5873.011=?==H H P P η
题11-14 现需设计一2K-H 行星减速器,要求的减速比为5.33,设行星轮数k=4,并采用标准齿轮传动,试确定各轮的齿数。 解:1.确定行星轮系类型:
决定采用图示的单排行星轮系,因为1)该行星轮系的传动比范围能满足设计要求;2)该行星轮系为负号机构,有较高的传动效率。
2.确定各轮齿数:由传动比条件
1
3
13111z z i i H
H +
=-= 即
33.4111
3
=-=H i z z 由安装条件
N K z z =+31 即 N z z z K z =?=???? ?
?+33.5411
131 02.2702.2401.2101.1801.1533
.541,,,,N
z ==
取241=z ,
33.41
3
=z z , 92.1033=z ,取 1043=z 由同心条件 ()()40241042
121
132=-=-=
z z z 故 241=z 402=z 1043=z
3检查
1) 传动比误差: z z i H
3333.524
104
11131≈+=+=误差很小,允许。
2) 邻接条件:()*
+>?+a h z K
z z 2180sin 221 即 4225.45> ,故合适。
题11-15 在图示的轮系中,轮1与电动机轴相联min 14403
1r n =,2021==z z ,603=z
904=z ,2105=z ,求?3=n
机械原理大作业2-齿轮机构分析
Harbin Institute of Technology 机械原理大作业三 题目:齿轮传动设计 院系:机电工程学院 班级: 姓名: 学号:
哈尔滨工业大学 1、设计题目 如图所示机械传动系统,运动由电动机1输入,经过机械传动系统变速后由圆锥齿轮16输出三种不同的转速,据下表中的原始数据,设计该传动系统。
2、传动比的分配计算 电动机转速n=745r/min,输出转速n1=23 r/min,n2=29 r/min,n3=35 r/min,带传动的最大传动比i pmax=2.8,滑移齿轮传动的最大传动比i vmax=4.5,定轴齿轮传动的最大传动比i dmax=4.5。 根据传动系统的原始参数可知,传动系统的总传动比为 i1=n/n1=745/35=21.286, i2=n/n2=745/29=25.690, i3=n/n3=745/23=32.391, 传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三部分实现。 设带传动的传动比为i pmax=2.8,滑移齿轮的传动比为i v1, i v2 和i v3, 定轴齿轮传动的传动比为i f,则总传动比 i1= i pmax*i v1*i f, i2= i pmax*i v2*i f,
i3= i pmax*i v3*i f, 令i v3=i vmax=4.5,则可得定轴齿轮传动部分的传动比i f=i3/(i pmax*i vmax)= 32.391/(2.8*4.5)= 2.571, 滑移齿轮传动的传动比 i v1 =i1/(i pmax*i vmax) =21.286/(2.8*2.571)= 2.957 i v2 =i2/(i pmax*i vmax) =25.690/(2.8*2.571)= 3.569 定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为 id=3√i f= 3√2.571 =1.370 小于等于 i pmax = 4 3、设定齿轮齿数及基本参数 根据滑移齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮5、6、7、8、9和10为角度变位齿轮,其齿数:z5 = 13,z6 = 38,z7 = 11,z8 =39,z9 = 9,z10 =40。它们的齿顶高系数h a* = 1,径向间隙系数c* = 0.25,分度圆压力角α = 20°,实际中心距a’= 51mm。 根据定轴齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮11、12、13和14为角度变位齿轮,其齿数:z11=z13=14,z12=z14=19。它们的齿顶高系数h a* =1,径向间隙系数c*=0.25,分度圆压力角α = 20°,实际中心距a’=51mm。 圆锤齿轮15和16选择为标准齿轮,其齿数:z15=17,z16=24。它们的齿顶高系数h a* =1,径向间隙系数c*=0.2,分度圆压力角α=20°。 4、滑移齿轮变速传动中每对齿轮的几何尺寸及重合度
机械设计机械原理课程设计题目 1 2020年4月19日
2 2020年4月19日 设计题目1:手动圆柱螺旋弹簧缠绕机设计 机构简图: 技术要求:弹簧螺距经过调整挂轮传动比可变,钢丝应拉紧,弹簧直径可变,最大长度Lmax 为300mm 。 主要参数: 弹黄中径D 2 : mm 钢丝直径d : mm 弹簧螺距p : mm 设计要求: 1)拟定机构系统总体运动方案,画出系统运动方案简图,完成论证报告。 2)完成传动系统或执行系统的结构设计,画出传动系统或执行系统的装配图。 钢丝 导轨 挂轮
3 2020年4月19日 3)设计主要构件和零件,完成1张构件图和3张零件工作图。 4)编写设计说明书。 完成日期: 年 月 日 指导教师 设计题目2:稳速器的设计 工作简图: 技术要求:输出轴转速稳定,主轴速度波动由辅轴调节。 主要参数: 3 4 1-输出轴 2-机体 3-主输入轴 4-辅输入轴
输出轴转速n2 r/min 主轴转速范围n1±r/min 输出轴功率P kw 设计要求: 1)拟定机构系统总体运动方案,画出系统运动方案简图,完成论证报告。 2)完成传动系统或执行系统的结构设计,画出传动系统或 执行系统的装配图。 3)设计主要构件和零件,完成1张构件图和3张零件工作 图。 4)编写设计说明书。 完成日期:年月日指导教师 设计题目3:自动钢板卷花机设计 工作简图: 4 2020年4月19日
5 2020年4月19日 技术要求:卷花轴转φ1角后,内限位板与卷花轴共同转φ 2角,外限位板可限位和退出,并有退料装置。限位板直径D :400mm , 主要参数: 卷花轴转角φ1:3600 内限位板转角φ2:1800 钢板宽和厚:30×3 生产率: 电机功率P :1.1kw 设计要求: 1)拟定机构系统总体运动方案,画出系统运动方案简图, 1 2 3 1-卷花轴 2-模板 3-钢板花 4-内限位板
机械原理大作业(二) 作业名称:机械原理 设计题目:凸轮机构 班级: 设计者: 学号: 指导教师: 设计时间: 哈尔滨工业大学机械设计
1. 设计题目 (1) 凸轮机构运动简图: 2.凸轮推杆升程,回程运动方程及推杆位移,速度,加速度线图 (1) 推杆升程,回程运动方程如下: A.推杆升程方程: 设为ω1rad/s )],2 3 cos(1[30)(Φ-=Φs ;3/20π≤Φ≤ )),23 sin(45)(Φ=Φv ;3/20π≤Φ≤ ),2 3 cos(2135)(Φ= Φa ;3/20π≤Φ≤ B.推杆回程方程: ],2310[ 60)(Φ-=Φπs ;3567ππ≤Φ≤ ,120)(π-=Φv ;3 5 67ππ≤Φ≤ ,0)(=Φa ;3 5 67ππ≤Φ≤ 2)推杆位移,速度,加速度线图如下: A.推杆位移线图
凸轮位移B.推杆速度线图 凸轮速度C.推杆加速度线图
凸轮速度 3.凸轮机构的错误!未找到引用源。-s线图,并依次确定凸轮的基圆半径和偏距. 1) 凸轮机构的错误!未找到引用源。-s线图:
(2)确定凸轮的基圆半径和偏距: 由图知:可取错误!未找到引用源。=400 mm,e=100mm 即:基圆半径错误!未找到引用源。=错误!未找到引用源。=412.31mm 偏距e=100mm 4.滚子半径的确定及凸轮理论轮廓和实际轮廓的绘制. 可取滚子半径r=60mm,则凸轮理论轮廓和实际轮廓如下: (1) 程序如下 fai01=2*pi/3; fai02=pi/2; fais1=pi/2; fais2=5*pi/9; h=60; fai1=0:0.001*pi:2*pi/3; fai2=2*pi/3:0.001*pi:7*pi/6; fai3=7*pi/6:0.001*pi:5*pi/3; fai4=5*pi/3:0.001*pi:2*pi; s1=h/2*(1-cos(pi*fai1/fai01)); s2=h+fai2*0; s3=h*(1-(fai3-(fai01+fais1))/fai02); s4=fai4*0; plot(fai1,s1,fai2,s2,fai3,s3,fai4,s4) v1=pi*h/(2*fai01)*sin(pi*fai1/fai01); v2=0*fai2; v3=-h/fai02; v4=0*fai4; plot(fai1,v1,fai2,v2,fai3,v3,fai4,v4) a1=2*pi*h/fai01.^2*cos(pi*fai1/fai01); a2=0*fai2;
第三章凸轮机构及其设计 3 - 1 判断题(正确的在其题号后括号内打√,否则打×) (1)为了避免从动件运动失真,平底从动件凸轮轮廓不能内凹。( ) (2)若凸轮机构的压力角过大,可用增大基圆半径来解决。( ) (3)从动件作等速运动的凸轮机构有柔性冲击。( ) (4)凸轮的基圆一般是指以理论轮廓上最小向径所作的圆。( ) (5)滚子从动件盘形凸轮的理论轮廓是滚子中心的轨迹。( ) 解答: (1)√(2)√(3)×(4)√(5)√ 3 - 2 填空题 (1)对于外凸凸轮,为了保证有正常的实际轮廓,其滚子半径应理论轮廓的最小曲率半径。 (2)滚子从动件盘形凸轮机构的基圆半径是从到的最短距离。 (3)在凸轮机构中,从动件按等加速等减速运动规律运动时,有冲击。 (4)绘制凸轮轮廓曲线时,常采用法,其原理是假设给整个凸轮机构加上一个与凸轮转动角速度ω的公共角速度,使凸轮相对固定。 (5)直动平底从动件盘形凸轮机构的压力角为,其基圆半径应按条件确定。解答: (1)小于 (2)凸轮回转中心到凸轮理论轮廓 (3)柔性冲击 (4)反转法相反的 (5)0 按全部廓线外凸的条件设计基圆半径 3 - 3 简答题 (1)凸轮机构中,常用的从动件运动规律有哪几种?各用于什么场合? 解答: 1)等速运动规律刚性冲击(硬冲)低速轻载 2)等加速、等减速运动规律柔性冲击中低速轻载 3)简谐(余弦)运动规律柔性冲击中低速中载 4)正弦加速度运动规律无冲击中高速轻载 5)3-4-5多项式运动规律无冲击中高速中载 (2)何谓凸轮机构的压力角?压力角的大小与凸轮基圆半径r0有何关系?压力角的大小对凸轮的传动有何影响? 解答: 在不计摩擦时,凸轮作用在从动件上推力作用线与从动件受力点的绝对速度方向所夹锐角称为压力角,称为凸轮机构的压力角。 基圆半径愈大,机构压力角愈小,但机构愈不紧凑;基圆半径愈小,机构压力角愈大,机
机械原理大作业-齿轮15 -标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
Harbin Institute of Technology 大作业设计说明书 课程名称:机械原理 设计题目:齿轮 院系:能源学院 班级: 设计者: 学号: 指导教师: 设计时间: 哈尔滨工业大学
1 设计题目 如图所示一个机械传动系统,运动由电动机1输入,经过机械传动系统变速后由圆锥齿轮16输出3种不同转速。 序号 电机转速 (r/min) 输出轴转速 (r/min) 带传动 最大传 动比 滑移齿轮传动 定轴齿轮传动 最大 传动比 模数 圆柱齿轮 圆锥齿轮 一对齿轮最 大传动比 模数 一对齿轮最 大传动比 模数 15 745 25 30 37 2.8≤ 4.5≤ 2 4.5≤ 3 4≤ 3 2 传动比分配 电机转速为0745/min n r =设输出转速为123,,n n n ,带传动最大传动比 max p i ,滑移齿轮传动最大传动比max v i ,定轴齿轮传动每对齿轮最大传动比 max d i 。 传动系统总传动比:011745 20.1437n i n = == 022745 24.8330 n i n = == 03374529.825 n i n = ==
带传动传动比max p i ,滑移齿轮传动比123,,v v v i i i ,定轴齿轮传动比 f i ,则总传动比又等于 1max 12max 23max 3p v f p v f p v f i i i i i i i i i i i i === 令3max 4.5v v i i ==,可得定轴传动比:3max max 29.8 2.372.8 4.5 f p v i i i i = ==? 由此可得: 11max 2 2 max 20.14 3.03 2.8 2.37 24.83 3.742.8 2.37 v p f v p f i i i i i i i i = = =?===? 定轴齿轮有3 对齿轮组成,每对传动比为: 1.334d i ===≤ 3 齿数确定 滑移齿轮:选择5、6、7、8为高度变位齿轮,9、10为标准齿轮,齿数分别为: 567826,79,22,83z z z z ====和91019,86z z ==;齿顶高系数 1a h *=, 径向间隙系数0.25c * =,分度圆压力角20α=,实际中心距 105a mm '=。 定轴齿轮:选择11、12、13、14为高度变位齿轮,齿数分别为: 1112131419,25,19,25z z z z ====;齿顶高系数1a h * =,径向间隙系数 0.25c *=,分度圆压力角20α=,实际中心距66a mm '=。圆锥齿轮15、16
天津大学机械原理与机械设计考研真题-考研资料-笔记讲义 天津考研网独家推出天津大学机械原理与机械设计考研资料、真题解析班等辅导资料,帮助考生在考研复习中能够理清做题思路,出题方向及复习重点。以下为相关资料的介绍。 【适用对象】2014年报考天津大学且初试科目为803机械原理与机械设计的专业课基础不扎实、对院系内部信息了解甚少的同学,适合跨校考生使用 【推荐理由】由本部签约的天津大学在读本硕博团队搜集整理精心编制成套,严格依照天津大学最新考研大纲及考研参考书目整理. 【使用方法】基础阶段使用课件配合指定教材复习,梳理知识点;强化阶段使用历年考研辅导班笔记总结分析总结天大授课重点,使用内部习题集强化练习;冲刺阶段使用历年试题等试题资料进行测试,同时可以分析出题思路及重点 【包含资料】天津大学机械原理与机械设计考研资料格式为A4纸打印版,原创及附赠资料总量达到3万余字共300余页,清晰易复习,由优秀考生研究生团队执笔,集合多方力量精制而成,填补了此专业原创资料空白的局面已与编写者签订资料保真转让协议,各位研友可放心使用参考 ! 第一部分由天津考研网提供的核心原创资料: 引言:为了帮助有志考天津大学机械工程专业研究生的学生更有效的复习,我写了这些资料,让大家对机械原理与机械设计这门专业课有更好的了解和把握,做到胸有成竹。 天津大学机械原理与机械设计考研资料包括以下信息,让您的复习事半功倍: 1、介绍了天津大学机械工程专业的实力,录取情况及研究方向,让您更了解目标。 2、对需要的资料进行了简单的说明。 3、认真分析历年考题,让您了解天大考研题的命题特点,把握复习方向。 4、非常详细的为大家讲解每个章节的重点。为您的复习节约时间,让您更准确的抓住重点。 5、讲解答题思路,让您在看到考题时不会感到无从下手。 6、对复试进行了详细分析,包括复试流程、复试内容、复试如何准备、复试的注意事项。 一、总体介绍;首先整体介绍天大机械工程专业的基本情况,包括报名录取情况和专业设置。由于天大09年开始采用一级学科统一招生的形式,所以和以往稍有不同。 二、取舍资料;虽然天大没有指定的参考书目,仅以大纲的形式告诉考生要考的范围,但是选择看合适的书可以事半功倍。另外,网络上关于专业课的书很多,还有往年的笔记及本科试题等,而在许多的资料中一大部分都是没有什么用的,既费时又费钱。所以对资料的取舍非常重要。 三、专业课篇: 四、初试后的准备;包括联系导师以及准备复试。 五、复试篇;复试对最后的排名起着非常重要的影响(以去年的排名变动说明) 第二部分由天津考研网提供的考研真题及答案: 1、天津大学803机械原理及机械设计1996-2012年考研真题,众所周知天大出题重复率高,一般多年的试题就是一个小题库,所以历年试题一定要仔细研究,通过多年试卷可总结出出题重点及思路;
三、 齿轮传动设计 一、设计题目 如图所示一个机械传动系统,运动由电动机1输入,经过机械传动系统变速后由圆锥齿轮16输出三种不同的转速。根据表中的传动系统原始参数设计该传动系统。 1.机构运动简图 1.电动机 2,4.皮带轮 3.皮带 5,6,7,8,9,10,11,12,13,14.圆柱齿轮 15,16.圆锥齿轮 2.机械传动系统原始参数 二、传动比的分配计算 电动机的转速1450/min n r =,输出转速1n =50r/min ,2n =45r/min ,3n =40r/min, 带传动的最大传动比max 2.5p i =,滑移齿轮的传动的最大传动比max 4v i =,定轴齿轮传动的最大传动比max 4d i =。
根据系统的原始参数,系统的总传动比为1i = 1 n n =1450/50=29.00 2i = 2n n =1450/45=32.222 3i =3 n n =1450/40=36.25 传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三部分实现。设带传动的传动比为max 2.5p i =,滑移齿轮的传动比为1v i 、2v i 和3v i ,定轴齿轮传动的传动比为f i 则总传动比为 1max 1p v f i i i i = 2max 2p v f i i i i = 3max 3p v f i i i i = 令3max 4v v i i == 则可得定轴齿轮传动部分的传动比为f i = max max 3 *v p i i i =4*5.225.36=3.625 滑移齿轮传动的传动比为1v i = f p i i i *max 1= 9 .2*5.229 =4 2v i = f p i i i *max 2=9.2*5.222 .32=4.444 定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为 d i =3f i =3625.3=1.536 三、齿轮齿数的确定 根据滑移齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮5、6、7、 8、9和10、为角度变位齿轮,其齿数: 52,19,41,17,50,231098765======z z z z z z 它们的齿顶高系数1a h *=,顶隙系数0.25c *=,分度圆压力角=20a o ,实际中心距取mm a 73=。 根据定轴齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮11, 12, 13和14为角度变位齿轮,齿数:==1311z z 17,==1412z z 23。它们的齿顶高系数 1a h *=,顶隙系数0.25c *=,分度圆压力角=20a o ,实际中心距'=56mm a 。圆锥
Harbin Institute of Technology 机械原理大作业一 课程名称:机械原理 设计题目:齿轮传动机构设计 院系: 班级: 设计者: 学号: 指导教师: 设计时间: 2013/05/29
1、设计题目 机构运动简图: 械传动系统原始参数: 序 号 电机转速 (r/min ) 输出轴转速(r/min ) 带传动最 大传动比 滑移齿轮传动 定轴齿轮传动 最大传 动比 模数 圆柱齿轮 圆锥齿轮 一对齿轮最大传动比 模数 一对齿轮最大传动比 模数 24 745 33 37 41 5.2≤ 4≤ 2 4≤ 3 4≤ 3 2、传动比的分配计算 电动机转速n=745r/min ,输出转速n 1=33 r/min ,n 2=37 r/min ,n 3=41 r/min ,带传动的最大传动比max p i =2.5,滑移齿轮传动的最大传动比max v i =4,定轴齿轮传动的最大传动比max d i =4。 根据传动系统的原始参数可知,传动系统的总传动比为: 171.1841 7451 1=== n n i 135.2037 7452 2===n n i 576.2233 7453 3===n n i 传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三部分实现。设带传
61 ,15,60,17,58,181098765======z z z z z z 1 * =a h 动的传动比为5.2max =p i ,滑移齿轮的传动比为321,v v v i i i 和,定轴齿轮传动的传动比为f i ,则总传动比: f v p i i i i 1max 1 = f v p i i i i 2max 2 = f v p i i i i 3max 3 = 令: 4max 3 ==v v i i 则可得定轴齿轮传动部分的传动比: 258.24 5.2576 .22max max 3=?== v p f i i i i 滑移齿轮传动的传动比: 219.3258.25.2171 .18max 11=?= = f p v i i i i 567.3258 .25.2135 .20max 22=?= = f p v i i i i 定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为 4312.1258.2max 33=≤===d f d i i i 3、齿轮齿数的确定 根据滑移齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮5、6、7、8、9 角度变位齿轮,其齿数:它们的齿顶高系数径向间隙系数25.0*=c ,分和10为 度圆压力角α=20°,实际中心距77' =a 。 根据定轴齿轮变速传动系统中对齿轮齿数的要求,可大致选择齿轮11、12、13和14为角度变位齿轮,其齿数: 21 ,16,21,1614131211====z z z z 。它们的齿顶高系数*a h =1,径 向间隙系数*c =0.25,分度圆压力角α=20°,实际中心距56' =a mm 。圆锤齿轮15和16选 择为标准齿轮 25 ,192515==z z ,齿顶高系数*a h =1,径向间隙系数*c =0.2,分度圆压力角 α=20°(等于啮合角'α)。
机械设计与机械原理教学及复习重点 机器与机构组成认识 【教学目的】 通过教学,使学生了解机械零件设计中所必备的基础知识,如零件的常用材料及其选择、结构工艺性、零件的设计准则及零件设计的一般步骤。 【教学内容】 一.了解本课程研究的对象、内容和任务。 二.掌握机械设计的基本要求和一般过程。 【重点】 1.机器和机构的异同。 2.构件和零件的区别。 平面连杆机构 【教学目的】 通过教学,使学生初步了解平面机构的组成及运动特点,掌握平面机构运动简图的绘制以及机构自由度的计算和平面四杆机构的工作特性。 【教学内容】 一.掌握平面机构的结构分析。 二.了解平面连杆机构的类型和应用。 三.掌握平面连杆机构的基本特性。
四、运用计算方法对平面连杆机构进行设计。 【重点】 1.平面连杆机构的基本形式。 2.平面四杆机构存在曲柄的条件及其基本特性。 3.平面四杆机构的设计。 凸轮机构 【教学目的】 通过本教学,使学生初步了解凸轮机构的类型、特点和适用场合,了解从动件常见运动规律及位移曲线的绘制,了解凸轮机构的常用材料及机构。 【教学内容】 一.了解凸轮机构的类型及应用 (1)凸轮机构的应用和组成 (2)凸轮机构的分类 二.掌握凸轮机构的从动件常用运动规律 (1)凸轮机构运动分析的基本概念 (2)从动件的常用运动规律 三.运用凸轮轮廓的设计方法确定凸轮机构的基本尺寸 四.了解凸轮机构的常用材料和机构 【重点】 1.凸轮机构的从动件常用运动规律 2.凸轮的设计方法
其他常用机构 【教学目的】 通过教学,使学生初步了齿轮机构、轮系机构以及各类间歇运动机构的工作原理、特点、功用及适用场合。 【教学内容】 一.掌握齿轮机构的工作原理、类型、特点和应用并学会棘轮基本参数的确定。 二.了解轮系的类型、特点和应用。 三.了解各类间歇运动机构的工作原理、类型及工作特点。【重点】 齿轮机构运动特点 轮系种类及传动比计算 间歇运动机构类型 标准件的选择——螺纹联接 【教学目的】 通过教学,使学生了解联接的功能和分类、常用螺纹的特点和应用;掌握螺栓组联接的结构设计和受力分析;紧螺栓联接的计算(螺栓仅受预紧力时的计算,螺栓承受预紧力和工作载荷时的计算,螺栓承受工作剪力的计算)。 【教学内容】 一.联接的功能和分类、常用螺纹的特点和应用; 二.螺栓组联接的结构设计和受力分析
上海交通大学 2012年硕士研究生入学考试试题回忆版 试题序号: 809 试题名称:机械原理与机械设计 一、选择题(20分) 1.以下运动副自由度为是(平面副螺旋副还有2个空间副) 2.曲柄摇杆机构摇杆的极限位置是(曲柄与连杆共线) 3.以下压力角为常量的机构是(输出件为平底直动从动件盘形凸轮机构) 4.凸轮基圆半径变大压力角如何变化 5.凸轮运动规律刚性冲击柔性冲击判断 6.正常齿制标准直齿圆柱齿轮的齿距p=18.84mm,齿顶圆直径300mm,则该齿轮的齿数:52 50 48 46 7.下列各圆可能与渐开线无交点的是(分度圆节圆齿顶圆齿根圆) 8.对斜齿圆柱齿轮,螺旋角越小:(这里把11年的大改成了小)传动平稳性越好,轴向分力越小传动平稳性越好,轴向分力越大传动平稳性越差,轴向分力越小传动平稳性越差,轴向分力越小 9.锥齿轮的当量齿数比实际齿数(Z v=Z/cosδ δ:分度圆锥角) 10.以下失效形式不属于强度问题的是(以往原题,选蜗杆变形) 11.不利于避免螺纹联接松动的是:加弹簧垫圈用对顶螺母用止动垫片增大螺纹升角 12.平键标记:键16×80 GB1096-79表示键,16×80表示:(注意一下,这里没标注ABC,可能是A省略不标,我还以为没打印出来捏。唉,悲剧啊) 13.带传动的中心距和小带轮直径不变,减小传动比,大带轮包角:(这里把11年的增大传动比改为减小)不变增大减小 14.带传动时,小轮主动,应力最大处:大带轮与紧边处小带轮与紧边处大带轮与松边处小带轮与松边处 15.链条节数宜采用:奇数偶数3的倍数4的倍数 16.在实际应用中应成对使用联轴器是:牙嵌联轴器轮胎式联轴器万向联轴器圆盘摩擦离合器 17.在非液体摩擦滑动轴承中,限制压强P的目的是:防止过热防止过度磨损防止塑性变形防止过大的摩擦阻力矩 18.弯矩合成中的那个α引入是为了什么 19.控制滑动轴承PV值的目的是:防止轴承破裂防止油膜破裂(维持边界膜不遭破裂)防止轴颈磨损(P)防止油脂变质 20.还有一个想不出来了基本上是原题或者原题作简单变化注意基础即可。 二、填充题(30分) 1.从设计角度来看,连杆机构可分为(3个空) 2.四杆机构杆长范围计算(11年出了个大题,今年只是1分的填空) 3.具有相同标准模数和压力角的直齿圆柱齿轮和斜齿圆柱齿轮的基圆,分度圆,齿根圆,齿顶圆,齿根,齿高的大小比较,直齿轮大的是(),小的是(),等的是()这三个空6分其余都是1分,而且这六个当中直齿轮大的应该没有吧 4.飞轮的作用(1)(2) 5.齿廓啮合基本定律是(),蜗杆传动正确啮合条件(交错角Σ=90°时,蜗杆导程角等于蜗轮
《机械原理》大作业 题目机械原理 齿轮机构设计 专业机械设计制造及其自动化 学号 学生 指导教师刘福利 完成日期2018.5.30
1.设计题目(21号) 如图所示一个机械传动系统,运动由电动机1输入,经过机械传动系统变速后由圆锥齿轮16输出三种不同的转速。根据表中的传动系统原始参数设计该传动系统。 1.1机构运动简图 1.电动机 2,4.皮带轮 3.皮带 5,6,7,8,9,10,11,12,13,14.圆柱齿轮15,16.圆 锥齿轮 1.2机械传动系统原始参数
2.传动比的分配计算 电动机转速n=745r/min,输出转速n 1=40 r/min,n 2 =35 r/min,n 3 =30 r/min, 带传动的最大传动比=2.5,滑移齿轮传动的最大传动比=4,定轴齿轮传动的最大传动比=4。 根据传动系统的原始参数可知,传动系统的总传动比为 =745/40=18.625 =745/35=21.286 =745/30=24.833 传动系统的总传动比由带传动、滑移齿轮传动和定轴齿轮传动三部分实现。设带传动的传动比为,滑移齿轮的传动比为,定轴齿轮传动的传动比为,则总传动比 令=4 则可得定轴齿轮传动部分的传动比为 = =2.4833 滑移齿轮传动的传动比= =3.0000 = =3.4287 定轴齿轮传动由3对齿轮传动组成,则每对齿轮的传动比为 =4 符合设计的参数要求。
3.齿轮齿数的确定 3.1 滑移齿轮传动齿数的确定 根据传动比符合的要求,以及中心距必须和后两个齿轮对相同,齿数最 好互质,不能产生根切以及尺寸尽可能小等一系列原则,初步确定滑移齿轮5,6为标准齿轮,齿数分别为: 18,= 53。设定实际中心距a’=71mm。 根据传动比符合的要求,以及中心距必须和其他两个齿轮对相同, 齿数最好互质,不能产生根切以及尺寸尽可能小等一系列原则,初步确定齿轮7,8,9,10均为角度变位齿轮,齿数分别为16, 55,变位系数 x1=0.55,x2=0.55 ;14,57,变位系数x1=0.50,x2=0.60。 它们的齿顶高系数=1,径向间隙系数=0.25,分度圆压力角=20°,实际 中心距=67mm。 (根据齿轮传动啮合角,齿轮齿数之和,齿轮齿数之比等各个参数,根据变位系数线图,选择适当的变位系数,具体参数见第4部分的齿轮详细参数) 3.2 定轴传动齿轮齿数的确定 根据定轴齿轮变速传动系统中传动比符合的要求,以及齿数最好互质,不能 产生根切以及尺寸尽可能小等一系列原则,可大致选择如下: 圆柱齿轮11、12、13和14为高度变位齿轮,其齿数:=17,23。变位系数x1=0.120,x2=-0.120,它们的齿顶高系数=1,径向间 隙系数=0.25,分度圆压力角=20°。 3.3 圆锥传动齿轮齿数的确定
页眉 《机械原理与机械设计基础》复习资料 单选题 复合铰链的转动副数等于( B )。 在平面机构中,每增加一个低副将引入( C )。 机构具有确定相对运动的条件是( A )。 某平面机构有5个低副,1个高副,机构自由度为 1,则该机构具有( A . 3 B . 4 C . 5 D . 6 在机械系统速度波动的一个周期中, ( D ) A. 当系统出现盈功时,系统的运转速度将降低,此时飞轮将储存能量 B .当系统出现盈功时,系统的运转速度将加快,此时飞轮将释放能量 C .当系统出现亏功时,系统的运转速度将加快,此时飞轮将储存能量 D .当系统出现亏功时,系统的运转速度将降低,此时飞轮将释放能量 速度不均匀系数是描述机械运转速度不均匀程度的重要参数,其表达式为( C )。 A . min B . ?max ?min = max 2 C . ?max ?min D . ?max ?min ?max ?min 在双曲柄机构中, 已知杆长 a = 80, b = 150, c = 120,贝y d 杆长度为(B ) A . d v 110 B . 110W d w 190 C . d v 190 D . 0v d 四杆机构处于死点时,其传动角 为(A )。 A . 0° B . 90° C . > 90° D . 0°v v 90° 在曲柄摇杆机构中,当曲柄为主动件,摇杆为从动件时,可将( B )。 A .连续转动变为往复移动 B .连续转动变为往复摆动 C .往复移动变为转动 D .往复摆动变为连续转动 对于平面连杆机构,通常可利用( C )的惯性储蓄能量,以越过机构的死点位置。 A .主动件 B .连杆 C .从动件 D .连架杆 曲柄摇杆机构中,摇杆为主动件时, (B )死点位置。 B .曲柄与连杆共线时为 1. 2. 3. 4. 件。 5. 6. 7. 8. 9. 10. 11. A .主动件数 B .构件数—1 C .构件数 D .活动构件数—1 A . 0个约束 B . 1个约束 C . 2个约束 D . 3个约束 A ?机构自由度数等于主动件数 C ?机构自由度数小于主动件数 B .机构自由度数大于主动件数 D .机构自由度数大于等于主动件数 B )个活动构 A .不存在
北航机械原理四齿轮 设计
215.在渐开线齿轮设计中为使机构结构尺寸紧凑,确定采用齿数z=12的齿轮。试问: (1)若用标准齿条刀具范成法切制z=12的直齿圆柱标准齿轮将会发生什么现象?为什么?(要求画出几何关系图,无需理论证明。) (2)为了避免上述现象,范成法切制z=12的直齿圆柱齿轮应采取什么措施? (3)范成法切制z=12, β=30?的斜齿圆柱齿轮,会不会产生根切? 216.已知齿条刀具的参数:mm,,,。用范成法加工一对直齿圆柱外齿轮A、B。A轮齿数,变位系数 ;B轮齿数,变位系数。试问: (1)加工时,与两齿轮分度圆作纯滚动的刀具节线是否相同,为什么?加工出来的两轮齿廓曲线形状与不变位加工出来的齿廓曲线是否对应相同? (2)两轮按无侧隙安装时,中心距,顶隙c和啮合角各为多少? (3)两轮的分度圆齿厚S和齿全高h各为多少? 217.已知一对渐开线直齿圆柱齿轮参数如下:mm,,。试问: (1)要求这对齿轮无根切且实现无侧隙啮合,应采取何种类型传动? (2)若要求该对齿轮的中心距为103mm,能使两齿轮均不产生根切吗? 提示: 218.有一回归轮系(即输入轴1与输出轴3共线),已知, , ,。各轮的压力角α=20?,模数m=2mm,=1,=0.25。问为保证中心距最小,而且各轮又不产生根切应采用哪种变位传动方案?说明理由并写出各轮变位系数x的大小。
219.若一对直齿圆柱齿轮传动的重合度=1.34,试说明若以啮合点移动一个基圆周节为单位,啮合时有多少时间为一对齿,多少时间为两对齿,试作图标出单齿啮合区域,并标明区域长度与的关系。 220.图示为一渐开线AK ,基圆半径=20mm,K点向径=35mm。试画点处渐开线的法线,并计算K点处渐开线的曲率半径。 出K
机械原理实验 ——齿轮传动机构
一.实验目的 1.掌握齿轮的相关几何参数的定义及其意义。 2.了解齿轮传动的构成,认识其组成原件。 3.掌握齿轮传动比的计算方法。 4.掌握齿轮的相关几何参数的计算。 5.训练动手能力,培养综合设计的能力。 二.实验仪器 序号名称数量备注 1 试验台机架 1 2 主动轴带轮 1 3 电机轴带轮 1 4 主轴 2 5 端盖 3 6 卡环 2 三.实验原理 (一)齿轮参数
(二)传动比计算 1、一对齿轮的传动比: 传动比大小: i12=ω1/ω2 =Z2/Z1 转向外啮合转向相反取“-”号 内啮合转向相同取“+”号 对于圆柱齿轮传动,从动轮与主动轮的转向关系可直接在传动比公式中表示即: i12=±z2/z1 其中"+"号表示主从动轮转向相同,用于内啮合;"-"号表示主从动轮转向相反,用于外啮合;对于圆锥齿轮传动和蜗杆传动,由于主从动轮运动不在同一平面内,因此不能用"±"号法确定,圆锥齿轮传动、蜗杆传动和齿轮齿条传动只能用画箭头法确定。对于齿轮齿条传动,若ω1表示齿轮1角速度,d1表示齿轮1分度圆直径,v2表示齿条的移动速度,存在以下关系:V2=d1ω1/2 定轴齿轮系传动比,在数值上等于组成该定轴齿轮系的各对啮
合齿轮传动的连乘积,也等于首末轮之间各对啮合齿轮中所有从动轮齿数的连乘积与所有主动轮齿数的连乘积之比。设定轴齿轮系首轮为1轮、末轮为K轮,定轴齿轮系传动比公式为: i=n1/nk=各对齿轮传动比的连乘积i1k=(-1)M所有从动轮齿数的连乘积/所有主动轮齿数的连乘积式中:"1"表示首轮,"K"表示末轮,m表示轮系中外啮合齿轮的对数。当m为奇数时传动比为负,表示首末轮转向相反;当m为偶数时传动比为负,表示首末轮转向相同。 注意:中介轮(惰轮)不影响传动比的大小,但改变了从动轮的转向。 四.实验分析 (一)齿轮参数的计算 一对渐开线标准外啮合圆柱齿轮传动的模数m=5mm,压力角 =20°,中心距a=350mm,传动比i12=1.8,求两轮的齿数、分度圆直径、齿顶圆直径、基圆直径以及分度圆上的齿厚和齿槽宽。 (二)传动比的计算 如图所示齿轮系,蜗杆的头数z1=1,右旋;蜗轮的齿数z2=26。一对圆锥齿轮z3=20,z4=21。一对圆柱齿轮z5=21,z6=28.
机械原理与机械设计实验指导书 刘峰沈小云编 广东海洋大学工程学院 2009年12月
前言 机械原理和机械设计(或机械设计基础)是机械类(或近机类)专业的主要的技术基础课,它们在基础课与专业课之间起着承上启下的作用;而实验是这些课程的重要实践环节。 对于实验课,同学们必须做到以下几点: 1.应按时参加实验,不得无故缺席。 2.实验前应认真复习教材的有关章节和讲授的内容,预习实验指导书,做好必要的准备工作。 3.实验时应严肃认真、积极思考、独立操作、相互配合,按照要求高质量地完成工作;并注意保持实验场地的安静、清洁。 4.实验报告或有关图纸应独立完成,按时上交。 5.爱护仪器设备和实验用具,未经教师许可,不得随意摆弄、擅自拆装;如有损坏、丢失,应立即报告,并酌情赔偿。
实验一 机构运动简图的测绘和分析 一、实验目的 1.学会根据各种机械实物或模型,绘制机构运动简图。 2.分析和验证机构自由度,进一步理解机构自由度的概念,掌握机构自由度的计算方法。 二、实验设备和工具 1.各类典型机械的实物或模型,量具。 2.铅笔、橡皮、草稿纸等(学生自备)。 三、实验原理和方法 1.实验原理 由于机构的运动仅与机构中所有构件的数目和构件所组成的运动副的数目、类型、相对位置有关,因此,在绘制机构运动简图时,可以撇开构件的形状和运动副的具体构造,而用一些简略的符号(见教科书或机械设计手册中有关“常用构件和运动副简图符号”的规定)来代表构件和运动副,并按一定的比例尺表示运动副的相对位置,以此表明机构的运动特征。表1—1为常用符号示例。 2.实验方法 (1)使被测绘的机构缓慢地运动,从原动构件开始仔细观察机构的运动,分清各个运动单元,从而确定组成机构的构件数目。 (2)根据相互连接的两构件间的接触情况及相对运动的特点,确定各个运动副的种类。 (3)在草稿纸上徒手按规定的符号及构件的连接次序,从原动构件开始,逐步画出机构运动简图的草图。用数字1、2、3…分别标注各构件,用拉丁字母A 、B 、C …分别标注各运动副。 (4)仔细测量与机构运动有关的尺寸,如转动副间的中心距和移动副导路的方向等,选定原动件的位置,并按一定的比例尺画成正式的机构运动简图。 () () mm m AB l AB l 图上长度实际长度比例尺= μ 对绘制指定的几种机构模型的机构运动简图,其中至少要有一种按确定的比例尺绘制,其余的可凭目测,使图与实物大致成比例,这种不按比例尺
齿轮机构分析与设计 设计一如图所示的二级减速器,设计要求如下: 1. 齿轮1、2的传动比i 12= 2.4 ,模数m = 2 mm 2. 齿轮3、4的传动比i 34=2 ,模数m = 2.5 mm 3. 安装中心距为68mm 4. 各轮1,20* ==h o α 5. 重合度15.1≥ε,齿顶厚 设计内容如下: 1.确定各轮齿数,传动比应保证误差在5%以内; 解:由m 1(z 1+ z 2)/2=68, z 2/ z 1=2.4得z 1=20,z 2=48, i 12=2.4满足要求,同理,由m 2(z 3+ z 4)/2=68, z 4/ z 3=2得z 3=18,z 4=36,i 34=2,满足要求 2.分析可能有几种传动方案,说明哪一种方案比较合理并说明理由; 解:z 1+ z 2=68>2 z min ,z 3+ z 4=54>2 z min 且a 12= m 1(z 1+ z 2)/2=68 a ’12 , a 34= m 2(z 3+ z 4)/2=67.5< a ’34 ,齿轮3,4必须使用正传动,故可选的传动方式有以下两种: (1)、1,2标准齿轮传动,3,4齿轮正传动。 (2)、1,2高度变为齿轮传动,3,4齿轮正传动。 第一种传动方式更合理。因为标准传动设计计算简单,重合度较大,不会发生过渡曲线干涉,齿顶厚较大。而零传动的
重合度会有降低,且小齿轮齿顶容易变尖。 3.分析确定你认为比较合理的传动方案的基本参数和全部尺寸; (1)1,2齿轮标准齿轮传动的基本参数: z 1=20,z 2=48,m 1=2, α=20o, h a *=1, c *=0.25。 全部尺寸:d 1=m 1z 1=40, d 2=m 2z 2=96; h a1= h a2=h a *m 1=2; h f1= h f2= (h a *+c *)m 1=2.5;h 1=h 2=4.5;d a1=(z 1+2 h a *)m 1=44, d a2=(z 2+2 h a *)m 1=100;d f1=(z 1-2 h a *)m 1=36,d f2=(z 2-2 h a *)m 1=92; d b1= d 1=37.59, d b2= d 2=90.21; p 1=p 2=πm 1=6.28; s 1=s 2=p/2=3.14; e 1=e 2=p/2=3.14;a 12= m 1(z 1+ z 2)/2=68; c 1=c 2= c *m 1=0.5; tan α a1= 2 2 R b1 a1R R - =0.609 , tan αa2= 2 2 R b2 a2R R - =0.504,重合度 ])tan - tan ()tan - tan ([π 2a2 2 a1 1 ααααεα Z Z +=由上数据可以得出ε=1.849>1 (2)3,4: z 3=18,z 4=36,m 2=2.5, αo, h a *=1, c *=0.25’α=a α α= 21.127o,再由inv α’=2(x 3+ x 4)tan α/(z 3+ z 4)+inv α 得 x 3+x 4=0.205,即x 3= x 4=0.1025, a ’=68>a=67.5 , y=(a ’-a)/2.5=0.2, △y =0.005
绪论 机器和机构的区别:从功能上讲,机器能完成有用的机械功或完成能量形式的转换,机构不能。 构件:组成机械的各个相对运动的实物称为构件,构件是机械中运动的单元体。 零件:机械中的制造单元体。 第一章 平面机构的自由度 §1—1 平面机构的组成 一、 构件的自由度 构件的自由度是构件可能出现的独立运动。 二、约束与运动副 这种使两构件直接接触并能产生一运动的联接,称为运动副。 根据组成运动副两构件之间的接触特性,运动副可分为低副和高副。 三、运动副及其分类1.低副 两构件以面接触的运动副称为低副。根据它们之间的相对运动是转动还是移动,运动副又可分为转动副和移动副。 平面机构中的低副引入两个约束,仅保留一个自由度。 2. 高副 两构件以点或线接触的运动副成为高副。 平面机构中的高副引入一个约束,保留了两个自由度。 §1—2 平面机构的自由度 一、自由度公式 若机构的自由度,以F 表示,F =3n —2PL — 二、计算平面机构的自由度应注意的事项 1.复合铰链 由K 个构件在一起组成复合绞链,实际上存在K-1个转动副 2.局部自由度 3.虚约束 三、构件系统具有确定的条件 构件系统成为机构的充分必要条件为:构件系统的自由度必须大于零,且原动件的数目必须等于自由度数。 第二章 平面连杆机构 §2—1 铰链四杆机构的基本型式 铰链四杆机构共有三种基本型式:曲柄摇杆机构、双曲柄机构、双摇杆机构。 §2—2 平面四杆机构的基本特性 一、 铰链四杆机构存在曲柄条件 1、满足最短杆+最长杆≤其余两杆长度之和 2、连架杆和机架必有一杆为最短杆 3、若满足杆长条件,则以最短杆为 机架,为双曲柄机构;以最短杆的邻边为机架,为曲柄摇杆机构,以最短杆 的对边为机架,为双摇杆机构。 二、急回特性 从动件反回程速度比进程速度快。这个性质称为机构的急回特性。 三、压力角和传动角 压力角:作用在从动件上的驱动力P 与该力作用点绝对速度υc 之间所夹的锐角α称为压力角。 传动角:习惯用压力角α的余角γ来判断传力性能,γ称为传动角。既: 四、死点位置