题目:基于单片机的双路信号检测系统综合设计
摘要
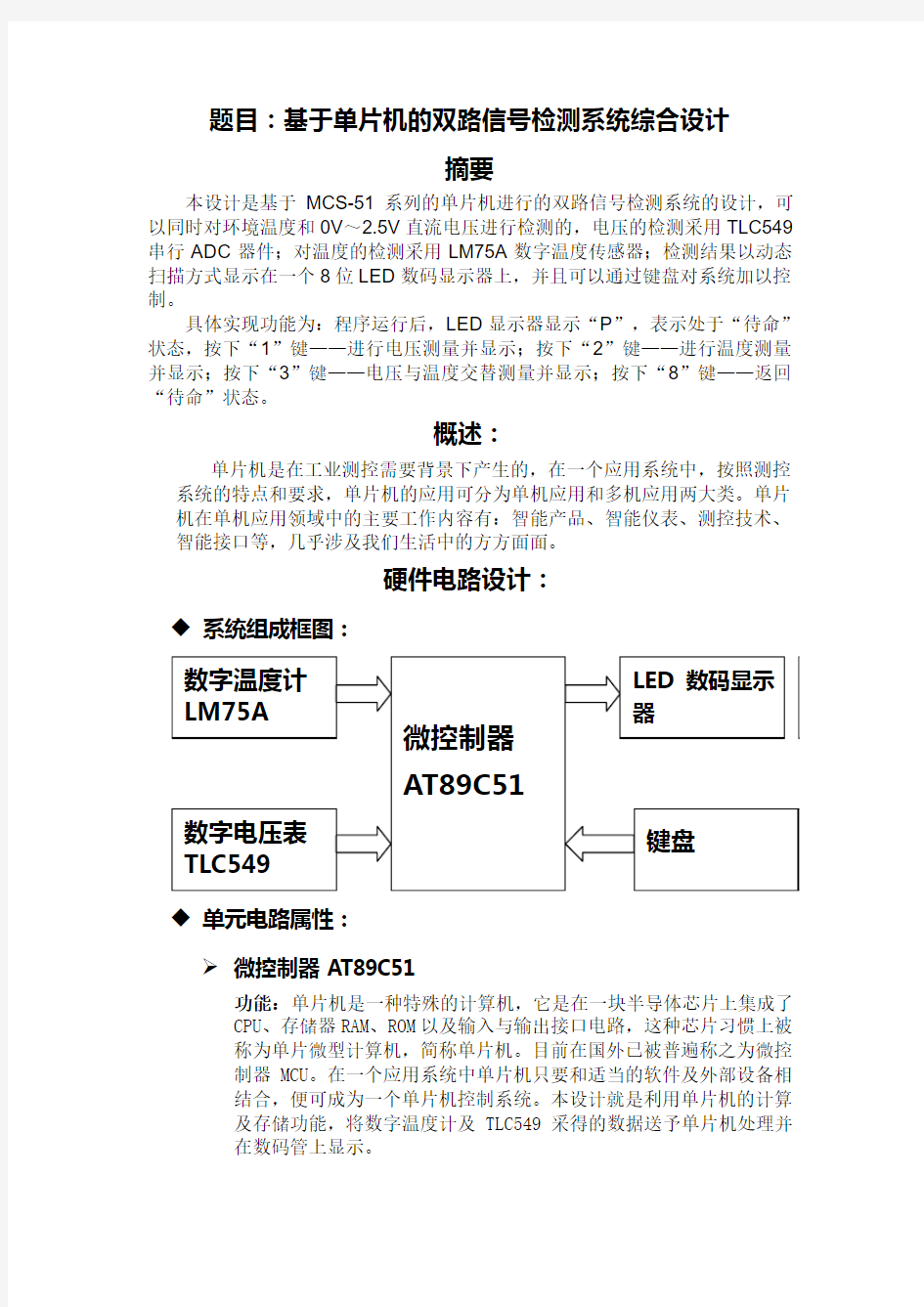
本设计是基于MCS-51系列的单片机进行的双路信号检测系统的设计,可以同时对环境温度和0V~2.5V直流电压进行检测的,电压的检测采用TLC549串行ADC器件;对温度的检测采用LM75A数字温度传感器;检测结果以动态扫描方式显示在一个8位LED数码显示器上,并且可以通过键盘对系统加以控制。
具体实现功能为:程序运行后,LED显示器显示“P”,表示处于“待命”状态,按下“1”键——进行电压测量并显示;按下“2”键——进行温度测量并显示;按下“3”键——电压与温度交替测量并显示;按下“8”键——返回“待命”状态。
概述:
单片机是在工业测控需要背景下产生的,在一个应用系统中,按照测控系统的特点和要求,单片机的应用可分为单机应用和多机应用两大类。单片机在单机应用领域中的主要工作内容有:智能产品、智能仪表、测控技术、智能接口等,几乎涉及我们生活中的方方面面。
硬件电路设计:
◆系统组成框图:
◆单元电路属性:
微控制器AT89C51
功能:单片机是一种特殊的计算机,它是在一块半导体芯片上集成了
CPU、存储器RAM、ROM以及输入与输出接口电路,这种芯片习惯上被
称为单片微型计算机,简称单片机。目前在国外已被普遍称之为微控
制器MCU。在一个应用系统中单片机只要和适当的软件及外部设备相
结合,便可成为一个单片机控制系统。本设计就是利用单片机的计算
及存储功能,将数字温度计及TLC549采得的数据送予单片机处理并
在数码管上显示。
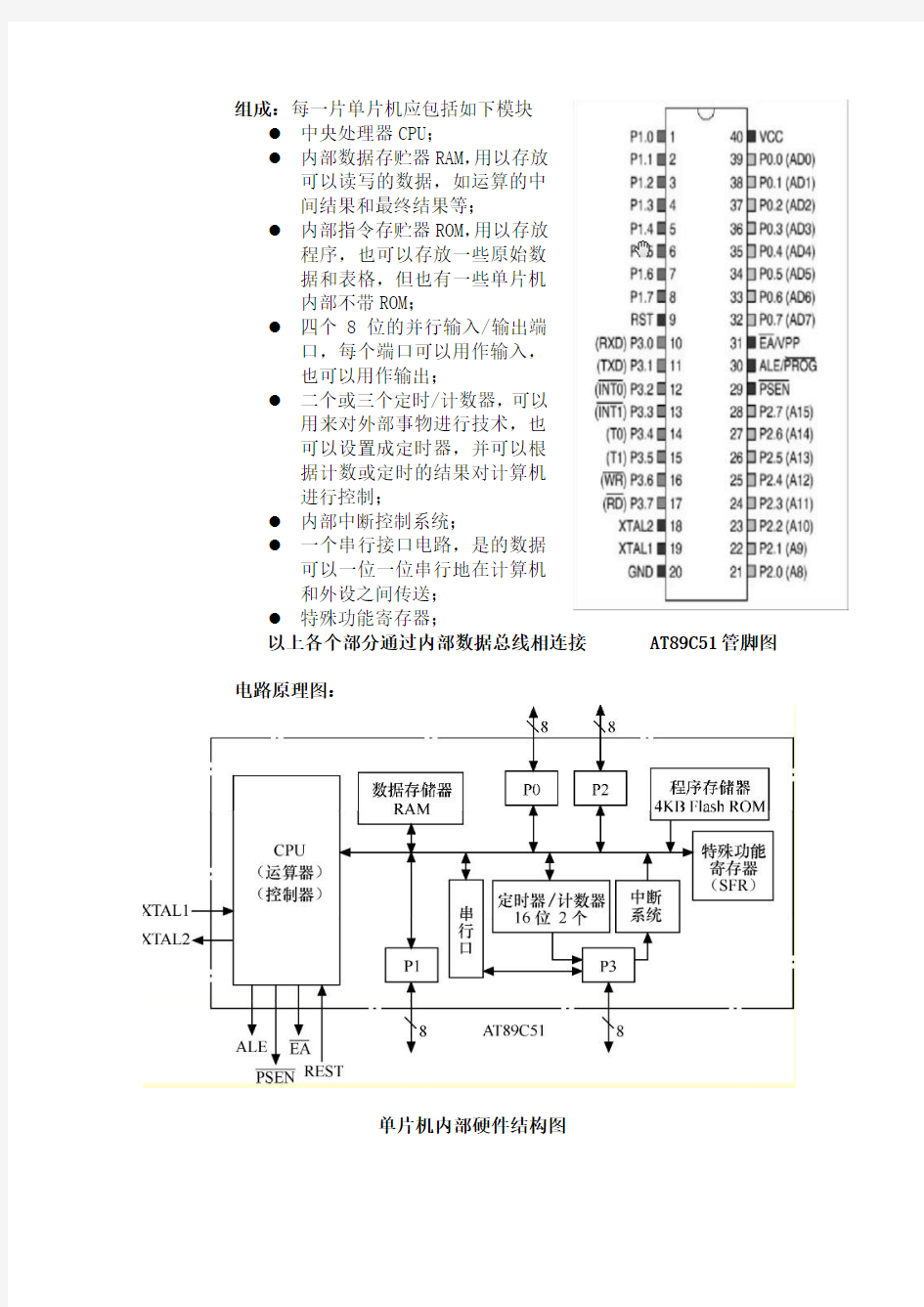
组成:每一片单片机应包括如下模块
●中央处理器CPU;
●内部数据存贮器RAM,用以存放
可以读写的数据,如运算的中
间结果和最终结果等;
●内部指令存贮器ROM,用以存放
程序,也可以存放一些原始数
据和表格,但也有一些单片机
内部不带ROM;
●四个8位的并行输入/输出端
口,每个端口可以用作输入,
也可以用作输出;
●二个或三个定时/计数器,可以
用来对外部事物进行技术,也
可以设置成定时器,并可以根
据计数或定时的结果对计算机
进行控制;
●内部中断控制系统;
●一个串行接口电路,是的数据
可以一位一位串行地在计算机
和外设之间传送;
●特殊功能寄存器;
以上各个部分通过内部数据总线相连接 AT89C51管脚图电路原理图:
单片机内部硬件结构图
工作原理:
1.引脚排列及功能
(1)I/O口线
●P0口—8位、漏极开路的双向I/O口
当使用片外存储器及外扩I/O口作为低字节地址/数据复用
线。在编程时,P0口可用于接收指令代码字节;程序校验
时,可输出指令字节。P0口也可用作同用I/O口使用,但
需加上拉电阻。作为普通输入时,应输出锁存器配置1。
●P1口—8位、准双向I/O口,具有内部上拉电阻
P1口是为用户准备的I/O双向口。在编程和校验时,可用
作输入低8位地址。用作输入时,应先将输出锁存器置1。
P1口可驱动4个TTL负载。
●P2口—8位、准双向I/O口,具有内部上拉电阻
当使用外部存储器或外扩I/O口时,P2口输出高8位地址。
在编程和校验时,P2口接收高字节地址和某些控制信号。
●P3口—8位、准双向I/O口,具有内部上拉电阻
P3口可作为普通I/O口。用作输入时,应先将输出锁存器
置1。在编程/校验时,P3口接收某些控制信号。它可驱动
4个TTL负载。
(2)控制信号线
●RST—复位输入信号,高电平有效。在振荡器稳定工作时,
在RST脚施加两个机器周期以上的高电平,将器件复位。
●EA/Vpp—外部程序存储器访问允许信号EA。当EA信号接
●地时,对ROM的读操作限定在外部存储器,地址为
0000H—FFFFH;当EA接Vcc时,对ROM的读操作从
内部程序存储器开始,并可延续至外部程序存储器。在编
程时,该引脚可接触编程电压5V或12V。在编程校验时,
该引脚可接VCC。
●PSEN—片内程序存储器读选通信号PSEN。在片外程序存
储器取指期间,当PSEN有效时,程序存储器的内容被送
至P0口;在访问外部RAM时,PSEN无效。
●—低字节锁存信号ALE。在系统扩展时,ALE
的下降沿将P0口输出的低8位地址锁存在外接的地址锁存
器中,以实现低字节地址和数据的分时传送。此外,ALE
端连续输出正脉冲,频率为晶振频率的1/6,可做外部定时
脉冲使用。
(3)外部晶振引线
●XTAL1 —片内振荡器反向放大器和时钟发生线路的输入
端。使用片内振荡器时,连接外部石英晶体和微调电容。
●XTAL2 —片内振荡器反向放大器的输出端。当使用片内振
荡器时,外接石英体和微调电容。
数字温度计LM75A
功能:LM75A是一个使用了内置带隙温度传感
器和∑-△模数转换技术的温度-数字转换器。它
也是一个温度检测器,可提供一个过热检测输
出。LM75A有3个可选的逻辑地址管脚,使得
同一总线上可同时连接8个器件而不发生地址
冲突。
组成:LM75A包含许多数据寄存器:配置寄存
器(Conf),用来存储器件的某些配置,如器芯片管脚图件的工作模式、OS工作模式、OS极性和OS故障队列等;温度寄存器(Temp),用来存储读取的数字温度;设定点寄存器(Tos & Thyst),用来存储可编程的过热关断和滞后限制,器件通过2线的串行I2C总线接口与控制器通信。LM75A还包含一个开漏输出(OS),当温度超过编程限制的值时该输出有效。
电路原理图:
芯片电路图
实验原理图
工作原理:LM75A利用内置的分辨率为0.125℃的带隙传感器来测量器件的温度,并将模数转换得到的11位的二进制数的补码数据存放到器件Temp寄存器中。Temp寄存器的数据可随时被I2C总线上的控制器读出。读温度数据并不会影响在读操作过程中执行的转换操作。
LM75A可设置成工作在两种模式:正常工作模式或关断模式。在正常工作模式中,每隔100ms执行一次温度-数字的转换,Temp寄存器的内容在每次转换后更新。在关断模式中,器件变成空闲状态,数据转换禁止,Temp寄存器保存着最后一次更新的结果;但是,在该模式下,器件的I2C接口仍然有效,寄存器的读/写操作继续执行。器件的工作模式通过配置寄存器的可编程位B0来设定。当器件上电或从关断模式进入正常工作模式时启动温度转换。
数字电压表TLC549
功能:TLC549是TI公司生产
的一种性价比非常高的8位A/
D转换器,它以8位开关电容
逐次逼近的方法实现A/D转
换,其转换速度小于17us,它
能方便地采用三线串行接口方
式与各种微处理器连接,构成
各种廉价的测控应用系统。
芯片管脚图
组成:TLC549包括通用控制逻辑,可自动工作或在微处理器控制下工作的片内采样-保持电路,具有差分高阻抗基准电压输入端,易于实现比率转换、定标以及与逻辑和电源噪声隔离的电路。整个开关电容逐次逼近转换器电路的设计允许在小于17μs的时间内以最大总误差为±0.5最低有效位(LSB)的精度实现转换。
电路原理图:
TLC549系统功能框图
TLC549实验原理图
工作原理:TLC549有片内系统时钟,该时钟与I/O CLOCK是独立工作的,无须特殊的速度或相位匹配。其工作时序为:当CS为高时,数据输出(DATA OUT)端处于高阻状态,此时I/O CLOCK不起作用。
这种CS控制作用允许在同时使用多片TLC549时,共用I/O CLOCK,以减少多路(片)A/D并用时的I/O控制端口。一组通常的控制时序为:(1)将CS置低。内部电路在测得CS下降沿后,再等待两个内部时钟上升沿和一个下降沿后,然后确认这一变化,最后自动将前一次转换结果的最高位(D7)位输出到DATA OUT端上。(2)前四个I/O
CLOCK周期的下降沿依次移出第2、3、4和第5个位(D6、D5、D4、D3),片上采样保持电路在第4个I/O CLOCK下降沿开始采样模拟输入。(3)接下来的3个I/O CLOCK周期的下降沿移出第6、7、8(D2、D1、D0)个转换位。(4)最后,片上采样保持电路在第8个I/O CLOCK 周期的下降沿将移出第6、7、8(D2、D1、D0)个转换位。保持功能将持续4个内部时钟周期,然后开始进行32个内部时钟周期的A/D转换。第8个I/O CLOCK后,CS必须为高,或I/O CLOCK保持低电平,这种状态需要维持36个内部系统时钟周期以等待保持和转换工作的完成。如果CS为低时I/O CLOCK上出现一个有效干扰脉冲,则微处理器/控制器将与器件的I/O时序失去同步;若CS为高时出现一次有效低电平,则将使引脚重新初始化,从而脱离原转换过程。在36个内部系统时钟周期结束之前,实施步骤(1)-(4),可重新启动一次新的A/D转换,与此同时,正在进行的转换终止,此时的输出是前一次的转换结果而不是正在进行的转换结果。若要在特定的时刻采样模拟信号,应使第8个I/O CLOCK时钟的下降沿与该时刻对应,因为芯片虽在第4个I/O CLOCK时钟下降沿开始采样,却在第8个I/O
CLOCK的下降沿开始保存。
八段数码管:
功能:数码管通过点亮和熄灭相应的二极管以达到显示所需内容的
功能。
组成:数码管按段数分为七段数码管和八段数码管,八段数码管比七段数码管多一个发光二极管单元(多一个小数点显示);按能显示多少个“8”可分为1位、2位、4位等等数码管;该设计所采用的为8位8
段数码管。
电路原理图:
a) 共阳极八段数码管b)共阴极八段数码管
b) 数码管公共端在中间d)数码管公共端在旁边
实验原理图
工作原理:用数码管显示信息时,由于每个数码管至少需要8 个I/O口,如果需要多个数码管,则需要太多I/O 口,而单片机的I/O 口是有限的。
在实际应用中,一般采用动态显示的方式解决此问题。动态显示是多个
数码管,交替显示,利用人的视觉暂留作用使人看到多个数码管同时显
示。在编程时,需要输出段选和位选信号,位选信号选中其中一个数码
管,然后输出段码,使该数码管显示所需要的内容,延时一段时间后,再选中另一个数码管,再输出对应的段码,高速交替。在动态显示程序
中,各个位的延时时间长短是非常重要的,如果延时时间长,则会出现
闪烁现象;如果延时时间太短,则会出现显示暗且有重影。
每一个按键都通过上
拉电阻接到高电平,
当按键未按下时向单
片机输入一个高电
平,同时单片机对连
接按键的I/O口不断扫
描,若扫描到某端口
为低电平,表明相应
的按键按下,单片机
可根据程序设定执行
相应的功能。
程序设计:
●模块化程序设计的思路介绍:
根据所要实现的功能,可将总体设计划分为四个模块:单片机主体、数字温度计、模数转换器、键盘以及数码管部分。在设计过程中可先将各个模块调试通过以后整合得到最终结果。如:先把数码管显示部分调试好,将数字温度计模块加入,使数码管可以正确显示温度值,再将模数转换器部分加入,正常显示电压值。最后再把键盘部分程序编好,使得按下相应按键可实现相应功能。
●总的程序流程框图:
●各部分程序设计介绍:
数字温度计LM75A:
程序流程图:
所用函数功能:
?函数:temSysInit() 功能:系统初始化
?函数:LM75A_GetTemp 功能:读出LM75A的温度值
返回:LM75A温度寄存器的数值(乘以0.125可得到摄氏度值)
?函数:ByteToStr() 功能:字节型变量c转换为十进制字符串
?函数:DispTemp() 功能:在数码管上显示出温度值
较特殊的处理方式:
因数码管位数有限,所以前四位用于温度值显示,后四位用于电压值显示,又因为常见温度正负都很难达到三位数,所以四位安排为:第一位用于显示温度符号,中间两位显示整数部分,第四位显示小数部分。故将ByteToStr()中对100取余一步去掉,并把DispTemp()函数中小数部分改为0-9,整数部分,小数点及小数部分的显示位置也做了调整。
数字电压表TLC549:
程序流程图:
所用函数功能:
?函数:adcSysInit() 功能:系统初始化
?函数:AdcInit() 功能:初始化ADC接口
?函数:DispVol() 功能:将ADC值转换成电压值,并显示较特殊的处理方式:
为防止电压显示与温度显示冲突,采用了二者交替显示的方式。
数码管部分:
程序流程图:
所用函数功能:
?函数:DispInit() 功能:数码管扫描显示初始化
?函数:DispClear() 功能:清除数码管的所有显示
?函数:DispChar() 功能:在数码管上显示字符
参数:x:数码管的坐标位置(0~7)
c:要显示的字符(仅限十进制数字和减号)
?函数:DispStr() 功能:在数码管上显示字符串
参数:x:数码管的坐标位置(0~7)
*s:要显示的字符串(字符仅限十进制数字和减号)
?函数:DispDotOn() 功能:显示指定位的小数点
参数:x为数码管坐标
较特殊的处理方式:
在DispChar()函数中加入一个新的条件语句用以显示P,在主程序中调用时,只要所选参数不在DispChar()函数所包含范围内即可显示P。
系统调试:
硬件平台:采用SmartSOPC 实验箱和Quick51核心板。
SmartSOPC多功能教学实验开发平台集众多种功能于一体,是SOPC、EDA、DSP、ARM、ARM7 SOC以及51教学实验、科研开发的最佳选择。开发平台采用核心板加主板的结构,更换核心板即可实现不同的功能。用户也可根据开放的接口来设计自己的核心板。基于标配QuickSOPC核心板的开发平台可进行SOPC、EDA、DSP的开发和实验。与一般的实验箱不同,SmartSOPC主板上大部分外设都不需要进行跳线设置,做实验时方便简单;此外每个外设的信号都设置了测试点,方面用户使用逻辑分析仪进行信号测量。Quick51正是跟
SmartSOPC相配套的8051单片机核心板,是一款自由的、开放全部系统资源的单片机实验板。单片机芯片采用Philips最新推出的拥有64KB Flash的增强型8052内核单片机P89LV51RD2,工作电压3.3V。Quick51与SmartSOPC配合,可以做各种单片机教学实验,如LED点阵扫描显示、键盘检测、动态数码管、液晶屏、电机驱动、I2C总线、红外收发、蜂鸣器、数字温度计、电子钟等等。
跳线连接情况:首先参照《Quick51跳线设置表》检查Quick51电路板上跳线JP1~JP7是否为默认设置;
1. Quick51实验板J14的PB-LE用杜邦线连接到J9;
2. Quick51实验板的P1端口用8芯排线连接到SmartSOPC实验箱B3区的
COM6;
3. Quick51实验板的J11(PB端口)用8芯排线连接到SmartSOPC实验箱B3区
的COM3;
4. SmartSOPC实验箱C2区的SCL用杜邦线连接到Quick51实验板J5的T0;
5. SmartSOPC实验箱C2区的SDA用杜邦线连接到Quick51实验板J5的T1;
6. Quick51实验板J5的/INT0用杜邦线连接到SmartSOPC实验箱D4区的nCS;
7. Quick51实验板J5的/INT1用杜邦线连接到SmartSOPC实验箱D4区的DAT;
8. Quick51实验板J5的T0用杜邦线连接到SmartSOPC实验箱D4区的CLK;
9. SmartSOPC实验箱JP6的KEY1、KEY2、KEY3、KEY8分别用短路帽短接;
10. SmartSOPC实验箱B2区JP6中跳线全部断开。
程序调试工具:Keil C51
Keil μVison系列是德国Keil Software(现已并入ARM公司)公司推出的51系列兼容单片机软件开发系统。μVison3是集成的可视化Windows操作界面,其提供了丰富的库函数和各种编译工具,能够对51系列单片机以及51系列兼容的绝大部分类型的单片机进行设计。Keil μVison系列可以支持单片机C51程序设计语言,也可以直接进行汇编语言的设计与编译。其主要特点有:支持汇编语言、C51语言等多种单片机设计语言;可视化的文件管理,界面友好;支持丰富的产品线,除了51及其兼容内核的单片机外,还新增加了对ARM内核产品的支持;具有完善的编译连接工具;具备丰富的仿真调试功能,可以仿真串口、A/D、D/A、定时器/计数器以及中断等资源,同时也可以和外部仿真器联合进行在线调试;内嵌RTX—51实时多任务操作系统;支持在一个工作空间中进行多项目的程序设计;支持多级代码优化。
程序调试步骤:
首先将数字温度计、数字电压表、键盘扫描、数码管显示等模块程序
写好,在主程序中调试数码管显示程序,之后将数字温度计程序加入,使数码管可以正确显示温度值。将数字温度计部分程序屏蔽,再将数字电压表程序加入,调试正确使数码管可以正确显示电压值。再把程序进行修改,增加温度、电压值交替显示的功能。最后将键盘部分加入,使得按下相应键可以实现相应的功能。至此调试结束。
参考文献:
1.《单片微型计算机原理、接口及应用》徐惠民、安德宁编著
北京邮电大学出版社2000年10月版
2.百度文库《周立功Quick51实验指导书》
3.道客巴巴《AT89C51中文资料》
4.《8位串行模数转换器TLC549的应用》安源
附录:
程序代码:
主程序:
/*
main.c
数字温度计、数字电压表
*/
#include "Disp.h"
#include "I2C.h"
#include
#include
#include "VolTab.h"
#include
#include
//定义TLC549、LM75A、键盘操作接口
sbit CS = P3^2;
sbit DAT = P3^3;
sbit CLK = P3^4;
sbit KEY1 = P2^0;
sbit KEY2 = P2^1;
sbit KEY3 = P2^2;
sbit KEY8 = P2^7;
/*
函数:Delay()
功能:延时1ms~65.536s
参数:
t>0时,延时(t*0.001)s
t=0时,延时65.536s
*/
void Delay(unsigned int t) {
do
{
TH0 = 0xFC;
TL0 = 0x66;
TR0 = 1;
while ( !TF0 );
TR0 = 0;
TF0 = 0;
} while ( --t != 0 );
}
/*
函数:ReadAdc()
功能:读取A/D转换结果返回:8位ADC代码
*/
unsigned char ReadAdc() {
unsigned char d;
unsigned char n;
CS = 0;
n = 5;
while ( --n != 0 );
n = 8;
do
{
d <<= 1;
if ( DAT ) d++;
CLK = 1;
CLK = 0;
}while ( --n != 0 );
CS = 1;
return d;
}
/*
函数:AdcInit()
功能:初始化ADC接口*/
void AdcInit()
{
CS = 1;
CLK = 0;
DAT = 1;
ReadAdc();
}
/*
函数:adcSysInit()
功能:数字电压表系统初始化
*/
void adcSysInit()
{
TMOD &= 0xF0;
TMOD |= 0x01;
DispInit();
AdcInit();
Delay(10);
}
/*
函数:temSysInit()
功能:数字温度计系统初始化
*/
void temSysInit()
{
TMOD &= 0xF0;
TMOD |= 0x01; //设置T0为16位定时器
DispInit(); //数码管扫描显示初始化
I2C_Init(); //初始化I2C总线
}
/*
函数:LM75A_GetTemp
功能:读出LM75A的温度值
返回:LM75A温度寄存器的数值(乘以0.125可得到摄氏度值)*/
int LM75A_GetTemp()
{
unsigned char buf[2];
int t;
I2C_Gets(0x90,0x00,2,buf);
t = buf[0];
t <<= 8;
t += buf[1];
t >>= 5; //去掉无关位
return t;
}
/*
函数:ByteToStr()
功能:字节型变量c转换为十进制字符串
*/
void ByteToStr(unsigned char idata *s, unsigned char c)
{
code unsigned char Tab[] = {10};
unsigned char i;
unsigned char t;
for ( i=0; i<1; i++ )
{
t = c / Tab[i];
*s++ = '0' + t;
c -= t * Tab[i];
}
*s++ = '0' + c;
*s = '\0';
}
//定义显示缓冲区(由定时中断程序自动扫描)
unsigned char DispBuf[8];
/*
函数:T1INTSVC()
功能:定时器T1的中断服务函数
*/
void T1INTSVC() interrupt 3
{
code unsigned char com[] = {0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};
static unsigned char n = 0;
TR1 = 0;
TH1 = 0xFC;
TL1 = 0x66;
TR1 = 1;
P1 = 0xFF; //暂停显示
XBYTE[0xE800] = ~DispBuf[n]; //更新扫描数据
P1 = ~com[n]; //重新显示
n++;
n &= 0x07;
}
//扫描键盘
unsigned char KeyScan()
{
unsigned char k = '\0';
if ( KEY1 == 0 ) k = '1';
if ( KEY2 == 0 ) k = '2';
if ( KEY3 == 0 ) k = '3';
if ( KEY8 == 0 ) k = '8';
return k;
}
/*
函数:DispClear()
功能:清除数码管的所有显示
*/
void DispClear()
{
unsigned char i;
for ( i=0; i<8; i++ )
{
DispBuf[i] = 0x00;
}
}
/*
函数:DispP()
功能:在数码管显示字幕P
*/
void DispP( )
{
DispBuf[1] = 0x73;
}
/*
函数:DispVol()
功能:将ADC值转换成电压值,并显示参数:
v:8位ADC结果
*/
void DispVol(unsigned char v)
{
DispStr(5,VolTab[v]);
DispDotOn(5);
}
/*
函数:DispTemp()
功能:在数码管上显示出温度值
参数:
t:补码,除以8以后才是真正温度值*/
void DispTemp(int t)
{
code unsigned char Tab[10][4] =
{
"0",
"1",
"2",
"3",
"4",
"5",
"6",
"7",
"8",
"9"
};
unsigned char buf[4];
bit s; //符号位
unsigned char i; //整数部分
unsigned char d; //小数部分
unsigned char x; //临时变量
//分离出符号
s = 0;
if ( t < 0 )
{
s = 1;
t = -t;
}
//分离出整数和小数部分
i = t / 8;
d = t % 8;
//整数部分转换成字符串
ByteToStr(buf,i);
x = 4 - strlen(buf);
//清除所有显示
DispClear();
//显示符号
if ( s ) DispChar(x,'-');
x++;
//显示整数部分
DispStr(x,buf);
//显示小数点
DispDotOn(2);
//显示小数部分
DispStr(4,Tab[d]);
}
/*
函数:DispT()
功能:在数码管上显示出温度值
*/
void DispT()
{
int t;
unsigned char k;
temSysInit();
for (;;)
{
t = LM75A_GetTemp();
DispTemp(t);
Delay(1000);
k=KeyScan();
if (k != '\0') break;
}
}
/*
函数:DispV()
功能:在数码管显示电压值
*/
void DispV()
{
unsigned char v; //电压值
unsigned char k;
adcSysInit();
for (;;)
{
v = ReadAdc(); //读取ADC值
DispVol(v); //显示成电压值
第7单元第2章现代生物技术 一、选择题 1. 下列应用实例与必须采用的生物技术,搭配错误的是应用实例生物技术 A. 培养无病毒植株组织培养 B. 制作酸奶发酵技术 C. 培育能产生人生长激素的大肠杆菌基因工程 D. “试管婴儿”的诞生克隆技术 2. 在克隆哺乳动物的过程中,常用到() A.发酵技术B.胚胎移植技术 C.人工授精技术D.转基因技术 3. 科学家成功地把人的抗病毒干扰素基因连接到烟草细胞的DNA分子上,使烟草获得了抗病毒能力。这项技术称为() A.克隆技术 B.嫁接技术 C.组织培养 D.转基因技术 4. 以下有关基因工程的叙述,正确的是() A.基因工程是细胞水平上的生物工程 B.基因工程的产物对人类都是有益的 C.基因工程产生的变异属于人工诱导变异 D.基因工程育种的优点之一是目的性强 5. 实施基因工程的最终目的是() A.定向提取生物的DNA B.在生物体外对DNA进行改造 C.定向分离DNA D.定向地改造生物的遗传性状 6. 可以生产转基因食品的生物是一类() A.提供外源基因的生物 B.转基因动植物 C.获得外源基因的生物 D.转基因微生物 应用实例生物技术 A. 培养无病毒植株组织培养 B. 制作酸奶发酵技术 C. 培育能产生人生长激素的大肠杆菌基因工程 D. “试管婴儿”的诞生克隆技术 8. 下列生物均是在现代生物技术作用下形成的,其中利用的技术与其他不同的是()A.巨型小鼠B.抗虫棉花 C.多利羊D.抗虫烟草 9. 可以创造出地球上原先不存在的生物的技术是 A.无性繁殖 B. 克隆 C .基因工程 D 组织培养. 10. “试管婴儿”技术在生物学上依据的原理是( ) 。A.有性生殖B.无性生殖C.克隆技术 D.基因工程 11. 人奶营养成分的优越性是牛奶永远无法比拟的。最近中国工程院院士李宁教授率领的科研团队将人乳基因导入奶牛中,使之产生人乳化的牛奶。这种生物技术称为A.发酵技术 B.克隆技术 C.转基因技术 D.仿生技术 12. 生物的生殖方式分为有性生殖和无性生殖,下列个体的产生是通过有性生殖形成的是() A.克隆绵羊B.组织培养的小麦幼苗 C.嫁接的柑橘D.试管婴儿 13. 据英国《每日邮报》 2010年12月26日报道,一位英国妇女在1998年通过试管婴儿技术受孕后,于次年产下两女,并将其余受精卵冷冻保存;11年后,她和丈夫成功利用当初保存的受精卵再获一个千金。“试管婴儿”技术在生物学上依据的原理是()。
实验报告 ( 2016-2017年度第二学期) 名称:《现代控制理论基础》 题目:状态空间模型分析 院系:控制科学与工程学院 班级: ___ 学号: __ 学生姓名: ______ 指导教师: _______ 成绩: 日期: 2017年 4月 15日
线控实验报告 一、实验目的: l.加强对现代控制理论相关知识的理解; 2.掌握用 matlab 进行系统李雅普诺夫稳定性分析、能控能观性分析; 二、实验内容 1 第一题:已知某系统的传递函数为G (s) S23S2 求解下列问题: (1)用 matlab 表示系统传递函数 num=[1]; den=[1 3 2]; sys=tf(num,den); sys1=zpk([],[-1 -2],1); 结果: sys = 1 ------------- s^2 + 3 s + 2 sys1 = 1 ----------- (s+1) (s+2) (2)求该系统状态空间表达式: [A1,B1,C1,D1]=tf2ss(num,den); A = -3-2 10 B = 1 C = 0 1
第二题:已知某系统的状态空间表达式为: 321 A ,B,C 01:10 求解下列问题: (1)求该系统的传递函数矩阵: (2)该系统的能观性和能空性: (3)求该系统的对角标准型: (4)求该系统能控标准型: (5)求该系统能观标准型: (6)求该系统的单位阶跃状态响应以及零输入响应:解题过程: 程序: A=[-3 -2;1 0];B=[1 0]';C=[0 1];D=0; [num,den]=ss2tf(A,B,C,D); co=ctrb(A,B); t1=rank(co); ob=obsv(A,C); t2=rank(ob); [At,Bt,Ct,Dt,T]=canon(A,B,C,D, 'modal' ); [Ac,Bc,Cc,Dc,Tc]=canon(A,B,C,D, 'companion' ); Ao=Ac'; Bo=Cc'; Co=Bc'; 结果: (1) num = 0 01 den = 1 32 (2)能控判别矩阵为: co = 1-3 0 1 能控判别矩阵的秩为: t1 = 2 故系统能控。 (3)能观判别矩阵为: ob = 0 1
华北电力大学 实验报告| | 实验名称状态空间模型分析 课程名称现代控制理论 | | 专业班级:自动化1201 学生姓名:马铭远 学号:2 成绩: 指导教师:刘鑫屏实验日期:4月25日
状态空间模型分析 一、实验目的 1.加强对现代控制理论相关知识的理解; 2.掌握用 matlab 进行系统李雅普诺夫稳定性分析、能控能观性分析; 二、实验仪器与软件 1. MATLAB7.6 环境 三、实验内容 1 、模型转换 图 1、模型转换示意图及所用命令 传递函数一般形式: MATLAB 表示为: G=tf(num,den),,其中 num,den 分别是上式中分子,分母系数矩阵。 零极点形式: MATLAB 表示为:G=zpk(Z,P,K) ,其中 Z,P ,K 分别表示上式中的零点矩阵,极点矩阵和增益。 传递函数向状态空间转换:[A,B,C,D] = TF2SS(NUM,DEN); 状态空间转换向传递函数:[NUM,DEN] = SS2TF(A,B,C,D,iu)---iu 表示对系统的第 iu 个输入量求传递函数;对单输入 iu 为 1。
例1:已知系统的传递函数为G(S)= 2 2 3 24 11611 s s s s s ++ +++ ,利用matlab将传递函数 和状态空间相互转换。 解:1.传递函数转换为状态空间模型: NUM=[1 2 4];DEN=[1 11 6 11]; [A,B,C,D] = tf2ss(NUM,DEN) 2.状态空间模型转换为传递函数: A=[-11 -6 -11;1 0 0;0 1 0];B=[1;0;0];C=[1 2 4];D=[0];iu=1; [NUM,DEN] = ss2tf(A,B,C,D,iu); G=tf(NUM,DEN) 2 、状态方程状态解和输出解 单位阶跃输入作用下的状态响应: G=ss(A,B,C,D);[y,t,x]=step(G);plot(t,x). 零输入响应 [y,t,x]=initial(G,x0)其中,x0 为状态初值。
电子科技大学通信与信息工程学院实验报告 实验名称现代电子技术综合实验 姓名: 学号: 评分: 教师签字 电子科技大学教务处制
电子科技大学 实验报告 学生姓名:学号:指导教师:熊万安 实验地点:科A333 实验时间:2016.3.7-2016.3.17 一、实验室名称:电子技术综合实验室 二、实验项目名称:电子技术综合实验 三、实验学时:32 四、实验目的与任务: 1、熟悉系统设计与实现原理 2、掌握KEIL C51的基本使用方法 3、熟悉SMART SOPC实验箱的应用 4、连接电路,编程调试,实现各部分的功能 5、完成系统软件的编写与调试 五、实验器材 1、PC机一台 2、SMART SOPC实验箱一套 六、实验原理、步骤及内容 试验要求: 1. 数码管第1、2位显示“1-”,第3、4位显示秒表程序:从8.0秒到1.0秒不断循环倒计时变化;同时,每秒钟,蜂鸣器对应发出0.3秒的声音加0.7秒的暂停,对应第8秒到第1秒,声音分别为“多(高
音1)西(7)拉(6)索(5)发(4)米(3)莱(2)朵(中音1)”;数码管第5位显示“-”号,数码管第6、7、8位显示温度值,其中第6、7位显示温度的两位整数,第8位显示1位小数。按按键转到任务2。 2. 停止声音和温度。数码管第1、2位显示“2-”,第3、4位显示学号的最后2位,第5位显示“-”号,第6到第8位显示ADC电压三位数值,按按鍵Key后转到任务3,同时蜂鸣器发出中音2的声音0.3秒; 3. 数码管第1、2位显示“3-”,第3、4位显示秒表程序:从8.0秒到1.0秒不断循环倒计时变化;调节电压值,当其从0变为最大的过程中,8个发光二极管也从最暗(或熄灭)变为最亮,当电压值为最大时,秒表暂停;当电压值为最小时,秒表回到初始值8.0;当电压值是其他值时,数码管又回到第3、4位显示从8.0秒到1.0秒的循环倒计时秒表状态。按按鍵Key回到任务1,同时蜂鸣器发出中音5的声音0.3秒。
现代控制理论实验报告
实验一系统能控性与能观性分析 一、实验目的 1.理解系统的能控和可观性。 二、实验设备 1.THBCC-1型信号与系统·控制理论及计算机控制技术实验平台; 三、实验容 二阶系统能控性和能观性的分析 四、实验原理 系统的能控性是指输入信号u对各状态变量x的控制能力,如果对于系统任意的初始状态,可以找到一个容许的输入量,在有限的时间把系统所有的状态引向状态空间的坐标原点,则称系统是能控的。 对于图21-1所示的电路系统,设iL和uc分别为系统的两个状态变量,如果电桥中 则输入电压ur能控制iL和uc状态变量的变化,此时,状态是能控的。反之,当 时,电桥中的A点和B点的电位始终相等,因而uc不受输入ur的控制,ur只能改变iL的大小,故系统不能控。 系统的能观性是指由系统的输出量确定所有初始状态的能力,如果在有限的时间根据系统的输出能唯一地确定系统的初始状态,则称系统能观。为了说明图21-1所示电路的能观性,分别列出电桥不平衡和平衡时的状态空间表达式: 平衡时:
由式(2)可知,状态变量iL和uc没有耦合关系,外施信号u只能控制iL的变化,不会改变uc的大小,所以uc不能控。基于输出是uc,而uc与iL无关连,即输出uc中不含有iL的信息,因此对uc的检测不能确定iL。反之式(1)中iL与uc有耦合关系,即ur的改变将同时控制iL和uc的大小。由于iL与uc的耦合关系,因而输出uc的检测,能得到iL 的信息,即根据uc的观测能确定iL(ω) 五、实验步骤 1.用2号导线将该单元中的一端接到阶跃信号发生器中输出2上,另一端接到地上。将阶跃信号发生器选择负输出。 2.将短路帽接到2K处,调节RP2,将Uab和Ucd的数据填在下面的表格中。然后将阶跃信号发生器选择正输出使调节RP1,记录Uab和Ucd。此时为非能控系统,Uab和Ucd没有关系(Ucd始终为0)。 3.将短路帽分别接到1K、3K处,重复上面的实验。 六、实验结果 表20-1Uab与Ucd的关系 Uab Ucd
电子科技大学电子工程学院实验报告 实验名称现代电子技术综合实验 姓名: 学号: 评分: 教师签字 电子科技大学教务处制
电子科技大学 实验报告 学生姓名:学号:指导教师:习友宝 实验地点:331 实验时间:(5—8周)周一5,6,7,8节 一、实验室名称:电子技术综合实验室 二、实验项目名称:基于单片机的多任务的控制系统的实现 三、实验学时:16 四、实验目的与任务: 1、熟悉系统设计与实现原理 2、掌握KEIL C51的基本使用方法 3、熟悉SMART SOPC实验箱的应用 4、连接电路,编程调试,实现各部分的功能 5、完成系统软件的编写与调试 五、实验器材 1、PC机一台 2、SMART SOPC实验箱一套 六、实验原理、步骤及内容 (一)试验要求(以课件要求为准) 基本要求: (1)程序运行后,在8位数码管上显示自己的班级学号(后8位),如2902002001,显示为“02002001”。 (2)定义5个按键(key1、key2、key3、key4、key5)作为功能选择键。每次按下key2时,为“秒表计时器”(定时中断实现),显示从“00.00.00.00”开始,即00时00分00秒00(1/100秒,即10ms)。当按下key1时,返回到显示
班级学号;按下其他功能键时,进入其他功能。 (3)按下key3键时,基于TLC549 A/D转换器进行电压测量(输入电压来自电位器,调节范围0~2.49V,单位:V),并将电压值显示在8位数码管的后3位。 (4)在上面(3)要求基础上,调节电位器,若输入电压超过2.00V,则声光报警,即用发光二极管指示灯(如LED1)闪烁(亮0.5s、灭0.5s);蜂鸣器响(用500Hz方波驱动);若输入电压低于2.00V后,则撤销声光报警。 扩展要求: (5)按下key4键,基于LM75A数字温度传感器,完成温度的测量,显示温度值保留到小数点后1位,整数部分最高位为零时不显示出来(高位零消影)。 (6)按下key5键,完成基于直流电机的转速测量。 (7)对电压测量值进行简单的数据处理,如去除尖峰干扰的平均滤波:每12个测量值数据为一组,去掉最大值和最小值后的10个测量值进行算术平均后,作为显示值。 (8)将班级学号、开机时间(时:分:秒)、电压值、温度值、转速等同时在LCD液晶显示屏上进行显示。 (二)实验内容 硬件设计 (原理框图)
现代控制理论 实 验 报 告 学院:机电学院 学号:XXXXX 姓名:XXXXX 班级:XXXX
实验一系统的传递函数阵和状态空间表达式的转换 一、实验目的 1.熟悉线性系统的数学模型、模型转换。 2.了解MATLAB 中相应的函数 二、实验内容及步骤 1.给定系统的传递函数为 150 3913.4036 18)(23++++= s s s s s G 要求(1)将其用Matlab 表达;(2)生成状态空间模型。 2.在Matlab 中建立如下离散系统的传递函数模型 y (k + 2) +5y (k +1) +6y (k ) = u (k + 2) + 2u (k +1) +u (k ) 3.在Matlab 中建立如下传递函数阵的Matlab 模型 ?????? ??????+++++++++++=7266 11632256 51 2)(2 32 2s s s s s s s s s s s s G 4.给定系统的模型为 ) 4.0)(25)(15() 2(18)(++++= s s s s s G 求(1)将其用Matlab 表达;(2)生成状态空间模型。 5.给定系统的状态方程系数矩阵如下: []0 , 360180,001,010001 1601384.40==???? ? ?????=????? ?????---=D C B A 用Matlab 将其以状态空间模型表示出来。 6.输入零极点函数模型,零点z=1,-2;极点p=-1,2,-3 增益k=1;求相应的传递函数模型、状态空间模型。 三、实验结果及分析 1.程序代码如下: num = [18 36]; den = [1 40.3 391 150]; tf(num,den) ss(tf(num,den))
基于FPGA的现代电子实验设计报告 ——数字式秒表设计(VHDL)学院:物理电子学院 专业: 学号: 学生姓名: 指导教师:刘曦 实验地点:科研楼303 实验时间:
摘要: 通过使用VHDL语言开发FPGA的一般流程,重点介绍了秒表的基本原理和相应的设计方案,最终采用了一种基于FPGA 的数字频率的实现方法。该设计采用硬件描述语言VHDL,在软件开发平台ISE上完成。该设计的秒表能准确地完成启动,停止,分段,复位功能。使用ModelSim 仿真软件对VHDL 程序做了仿真,并完成了综合布局布线,最终下载到EEC-FPGA实验板上取得良好测试效果。 关键词:FPGA,VHDL,ISE,ModelSim
目录 绪论 (4) 第一章实验任务 (5) 第二章系统需求和解决方案计划 (5) 第三章设计思路 (6) 第四章系统组成和解决方案 (6) 第五章各分模块原理 (8) 第六章仿真结果与分析 (11) 第七章分配引脚和下载实现 (13) 第八章实验结论 (14)
绪论: 1.1课程介绍: 《现代电子技术综合实验》课程通过引入模拟电子技术和数字逻辑设计的综合应用、基于MCU/FPGA/EDA技术的系统设计等综合型设计型实验,对学生进行电子系统综合设计与实践能力的训练与培养。 通过《现代电子技术综合实验》课程的学习,使学生对系统设计原理、主要性能参数的选择原则、单元电路和系统电路设计方法及仿真技术、测试方案拟定及调测技术有所了解;使学生初步掌握电子技术中应用开发的一般流程,初步建立起有关系统设计的基本概念,掌握其基本设计方法,为将来从事电子技术应用和研究工作打下基础。 本文介绍了基于FPGA的数字式秒表的设计方法,设计采用硬件描述语言VHDL ,在软件开发平台ISE上完成,可以在较高速时钟频率(48MHz)下正常工作。该数字频率计采用测频的方法,能准确的测量频率在10Hz到100MHz之间的信号。使用ModelSim仿真软件对VHDL程序做了仿真,并完成了综合布局布线,最终下载到芯片Spartan3A上取得良好测试效果。 1.2VHDL语言简介:
激光图案控制电路焊接与调试 陈XX 微电子学 摘要:本课程要求分析激光控制系统的工作原理,焊接散装元件来组装激光控制器并调试。在这个过程中掌握电路的焊接与调试方法。 关键字:激光图案控制电路调试 通激光图案控制电路的焊接和调试实验,了解了激光控制电路的原理,培养了综合分析和设计电路的能力,焊接调试电路的能力。锻炼了动手能力,切实提高实验技能,增强了对微电子专业的兴趣。 1.实验内容 1.1实验目的 本课程通过焊接散装元件来组装收音机与激光控制器并调试。在这个过程中需要分析收音机与激光控制系统的工作原理,并掌握调试电路的方法。 在本课程中需学会认识元件,检测元件,使用万用表、电烙铁等工具的方法。掌握一定的焊接技巧。 1.2实验仪器及元件 变压器,万用表,万用版,整流桥,7812稳压管,555多谐振荡器,4017脉冲分配器,4013,麦克风,滑动变阻器,集成运放,继电器,各种阻值的电阻,二极管,发光二极管,电容,三极管,插座,导线等。 1.3电路原理 1.3.1激光控制器电路原理 (1)激光图案变化原理 激光器上有两个直流电机。每个电机上带有一个反射镜,当电机转动时,反射镜跟着转动,由于镜面不平,反射镜在转动时也出现微小的震动,因而射在镜面上的激光的入射角也出现微小波动,导致反射光不再是一条笔直不动的光线,而是有规律地摆动;这条有规律摆动的光射在第二个电机上,又会出现与第一个电机类似的情况,导致最终反射出的激光按照某种规律摆动,形成固定的图案。当任一个电机转速发生变化时,光线摆动的规律就会变化,导致图案发生变化。 该控制器总利用电压变化控制两个直流电机电机,不同的电压驱动电机产生不同的转速。两个电机的驱动电压大小由控制器决定。该控制器一共能产生8组图案。有两种工作模式使图案变化,一种是自动的,即隔一定时间图案自动变化,另一种模式是声控,即控制器接收到较大的声音时,图案发生变化。 (2)原理图
现代控制理论实验报告 组员: 院系:信息工程学院 专业: 指导老师: 年月日
实验1 系统的传递函数阵和状态空间表达式的转换 [实验要求] 应用MATLAB 对系统仿照[例]编程,求系统的A 、B 、C 、阵;然后再仿照[例]进行验证。并写出实验报告。 [实验目的] 1、学习多变量系统状态空间表达式的建立方法、了解系统状态空间表达式与传递函数相互转换的方法; 2、通过编程、上机调试,掌握多变量系统状态空间表达式与传递函数相互转换方法。 [实验内容] 1 设系统的模型如式示。 p m n R y R u R x D Cx y Bu Ax x ∈∈∈?? ?+=+=& 其中A 为n ×n 维系数矩阵、B 为n ×m 维输入矩阵 C 为p ×n 维输出矩阵,D 为传递阵,一般情况下为0,只有n 和m 维数相同时,D=1。系统的传递函数阵和状态空间表达式之间的关系如式示。 D B A SI C s den s num s G +-== -1)() () (()( 式中,)(s num 表示传递函数阵的分子阵,其维数是p ×m ;)(s den 表示传递函数阵的按s 降幂排列的分母。 2 实验步骤 ① 根据所给系统的传递函数或(A 、B 、C 阵),依据系统的传递函数阵和状态空间表达式之间的关系如式,采用MATLA 的编程。注意:ss2tf 和tf2ss 是互为逆转换的指令; ② 在MATLA 界面下调试程序,并检查是否运行正确。 ③ [] 已知SISO 系统的状态空间表达式为,求系统的传递函数。
, 2010050010000100001 0432143 21u x x x x x x x x ? ? ??? ? ??????-+????????????????????????-=????????????&&&&[]??? ? ? ???????=43210001x x x x y 程序: A=[0 1 0 0;0 0 -1 0;0 0 0 1;0 0 5 0]; B=[0;1;0;-2]; C=[1 0 0 0]; D=0; [num,den]=ss2tf(A,B,C,D,1) 程序运行结果: num = 0 den = 0 0 0 从程序运行结果得到:系统的传递函数为: 2 4253 )(s s s S G --= ④ [] 从系统的传递函数式求状态空间表达式。 程序: num =[0 0 1 0 -3]; den =[1 0 -5 0 0]; [A,B,C,D]=tf2ss(num,den) 程序运行结果: A = 0 5 0 0 1 0 0 0 0 1 0 0
河南工业大学 现代控制理论实验报告姓名:朱建勇 班级:自动1306 学号:201323020601
现代控制理论 实验报告 专业: 自动化 班级: 自动1306 姓名: 朱建勇 学号: 201323020601 成绩评定: 一、实验题目: 线性系统状态空间表达式的建立以及线性变换 二、实验目的 1. 掌握线性定常系统的状态空间表达式。学会在MATLAB 中建立状态空间模型的方法。 2. 掌握传递函数与状态空间表达式之间相互转换的方法。学会用MATLAB 实现不同模型之 间的相互转换。 3. 熟悉系统的连接。学会用MATLAB 确定整个系统的状态空间表达式和传递函数。 4. 掌握状态空间表达式的相似变换。掌握将状态空间表达式转换为对角标准型、约当标准 型、能控标准型和能观测标准型的方法。学会用MATLAB 进行线性变换。 三、实验仪器 个人笔记本电脑 Matlab R2014a 软件 四、实验内容 1. 已知系统的传递函数 (a) ) 3()1(4)(2++=s s s s G
(b) 3486)(22++++=s s s s s G
(c) 6 1161)(232+++++=z z z z z z G (1)建立系统的TF 或ZPK 模型。 (2)将给定传递函数用函数ss( )转换为状态空间表达式。再将得到的状态空间表达式用函 数tf( )转换为传递函数,并与原传递函数进行比较。 (3)将给定传递函数用函数jordants( )转换为对角标准型或约当标准型。再将得到的对角 标准型或约当标准型用函数tf( )转换为传递函数,并与原传递函数进行比较。 (4)将给定传递函数用函数ctrlts( )转换为能控标准型和能观测标准型。再将得到的能控标 准型和能观测标准型用函数tf( )转换为传递函数,并与原传递函数进行比较。
电子科技大学电子信息工程学院实验报告 实验名称现代电子技术综合实验 姓名:张彦婷 学号:2012029070030 评分: 教师签字 电子科技大学教务处制
电子科技大学 实验报告 学生姓名:张彦婷学号:2012029070030 指导教师:熊万安 实验地点:科A333 实验时间:2015.4.23 一、实验室名称:电子技术综合实验室 二、实验项目名称: 三、实验学时:32 四、实验目的与任务: 1、熟悉系统设计与实现原理 2、掌握KEIL C51的基本使用方法 3、熟悉SMART SOPC实验箱的应用 4、连接电路,编程调试,实现各部分的功能 5、完成系统软件的编写与调试 五、实验器材 1、PC机一台 2、SMART SOPC实验箱一套 六、实验原理、步骤及内容 试验要求(必须写): 1、八个数码管显示最后八位学号,八个发光二极管(LED灯)依次亮灭,进入循环流水灯显示状态,每个灯亮0.3秒后,灭0.2秒。循环两轮后,转入任务2。 2、第一、二个数码管显示室温,第三、六个数码管显示“-”号,第四、五个数码管显示ADC的值,第七、八个数码管显示设定温度,设定温度值为(当前环境温度-1)度加上电压值的整数值。旋转按钮,调节电压值,同时也调整了设定温度值。
3、由设定温度和实际环境温度的温差驱动蜂鸣器发声。若温度等于环境温度,蜂鸣器不发声;有温差时,蜂鸣器发声0.2秒。 4、增加按键,当其按下,转入任务1。 1、硬件设计(可打印) 硬件结构: 系统原理图:
2、各部分硬件原理(可打印) (1)数码管动态扫描原理:先把第一个数码管的显示数据送到数据线,同时选通DIS_COM1,而其他数码管的DIS_COMx信号禁止;延迟一段时间(通常不超过10ms),再把第二个数码管的显示数据送到数据线,同时选通DIS_COM2,而其他数码管的DIS_COMx信号禁止;延时一段时间,在显示下一个。注意:整个数码管的扫描频率应当大于50Hz,防止出现明显的闪烁。 (2)外部中断原理:如果外部中断请求信号在产生后能在较短时间每自动撤销,则选择低电平触发。由于这是“一次性的”,中断处理程序执行完毕后科立即返回主程序,而不必等待中断信号请求信号恢复为高电平。 INT0和INH1的中断信号分别是0和2,入口地址分别是0003H和0013H。 (3)L ED流水灯:在LED1~LED8引脚上周期性的输出流水数据。如前一个输出二进制数据是11111100,点亮了LED1~LED2,下一个输出二进制数据则应是11111000,点亮LED1~LED3,继续这一方式并循环,就可
实验六、植物种群自疏的内因和外因效应 一、目的 通过阅读文献材料,学习验证型实验设计、结果表达和分析的方法。掌握通过测定不同栽培密度和不同盐度的因子作用下,影响植物种群生长自疏效应的内因和外因的表达方式和强度。 二、原理 生态系统的结构与功能受到来自系统内部和外部的调节与控制,如森林植被过密时会产生自疏作用,间伐后的疏林会很快重新郁闭;生态系统中各营养级间生物的数量关系常常相对稳定等。这类受控的稳态是生态系统借助生物与环境的相互作用,达到稳态的作用结果。 种群在一定的生境条件下,种群数量会增长,但是并不是无限制的增长,会受到种群最大容量的制约,种群内部个体间的竞争会产生自疏作用使种群维持在一定的水平。自疏作用为种内斗争和资源供给状况的综合反映,森林植物、藤壶等是自疏效应的明显例子。 本实验将开展经济作物红麻(Kenaf,Hibiscus cannabinus)的模拟栽培试验。通过设定不同栽培密度,对其进行短时间的栽培试验记录,评价种群密度(内因)对种群自疏效应的影响。 三、材料与仪器: 实验材料:实验室将提供统一购置的红麻种子。种植所需土壤在校区内采集。 仪器:塑料盆4个/组、电子天平、烘箱、标签纸、记号笔等。 试剂: 海盐。 四、实验内容 4.1 试验设计 每个组自行设定不同的幼苗种植株行距处理3组,进行栽培和浇灌。
4.2 观察记录 八周内,每周固定时间对每盆内的作物幼苗进行观察,记录每棵植株的叶片数,以及每个处理的存活株数,每次每个处理需拍照记录1张。 4.3 生物量的测定 第八周将所有植株个体收获,小心地洗净,去除叶片、根上的砂粒泥土,放入烘箱烘干24h后,分成地上部和根部,进行称重。 4.4 分析数据,撰写报告 记录描述不同时间、不同处理的作物幼苗个体叶片数、存活率,以及八周内的生物量积累情况。
现代控制理论课程总结 学习心得 从经典控制论发展到现代控制论,是人类对控制技术认识上的一次飞跃。现代控制论是用状态空间方法表示,概念抽象,不易掌握。对于《现代控制理论》这门课程,在刚拿到课本的时候,没上张老师的课之前,咋一看,会认为开课的内容会是上学期学的控制理论基础的累赘或者简单的重复,更甚至我还以为是线性代数的复现呢!根本没有和现代控制论联系到一起。但后面随着老师讲课的风格的深入浅出,循循善诱,发现和自己想象的恰恰相反,张老师以她特有的讲课风格,精心准备的ppt 课件,向我们展示了现代控制理论发展过程,以及该掌握内容的方方面面,个人觉得,我们不仅掌握了现代控制理论的理论知识,更重要的是学会了掌握这门知识的严谨的逻辑思维和科学的学习方法,对以后学习其他知识及在工作上的需要大有裨益,总之学习了这门课让我受益匪浅。 由于我们学习这门课的课时不是很多,并结合我们学生学习的需求及所要掌握的课程深入程度,张老师根据我们教学安排需要,我们这学期学习的内容主要有:1.绪论;2.控制系统的状态表达式;3.控制系统状态表达式的解;4.线性系统的能空性和能观性;5.线性定常系统的综合。而状态变量和状态空间表达式、状态转移矩阵、系统的能控性与能观性以及线性定常系统的综合是本门课程的主要学习内容。当然学习的内容还包括老师根据多年教学经验及对该学科的研究的一些深入见解。 在现代科学技术飞速发展中,伴随着学科的高度分化和高度综合,各学科之间相互交叉、相互渗透,出现了横向科学。作为跨接于自然科学和社会科学的具有横向科学特点的现代控制理论已成为我国理工科大学高年级的必修课。 经典控制理论的特点 经典控制理论以拉氏变换为数学工具,以单输入-单输出的线性定常系统为主要的研究对象。将描述系统的微分方程或差分方程变换到复数域中,得到系统的传递函数,并以此作为基础在频率域中对系统进行分析和设计,确定控制器的结构和参数。通常是采用反馈控制,构成所谓闭环控制系统。经典控制理论具有明显的局限性,突出的是难以有效地应用于时变系统、多变量系统,也难以揭示系统更为深刻的特性。当把这种理论推广到更为复杂的系统时,经典控制理论就显得无能为力了,这是因为它的以下几个特点所决定。 1.经典控制理论只限于研究线性定常系统,即使对最简单的非线性系统也是无法处理的;这就从本质上忽略了系统结构的内在特性,也不能处理输入和输出皆大于1的系统。实际上,大多数工程对象都是多输入-多输出系统,尽管人们做了很多尝试,但是,用经典控制理论设计这类系统都没有得到满意的结果;2.经典控制理论采用试探法设计系统。即根据经验选用合适的、简单的、工程上易于实现的控制器,然后对系统进行分析,直至找到满意的结果为止。虽然这种设计方法具有实用等很多完整,从而促使现代控制理论的发展:对经典理论的精确化、数学化及理论化。优点,但是,在推理上却是不能令人满意的,效果也
电工电子综合试验——数字计时器实验报告 学号: 姓名: 学院: 专业:通信工程
目录 一,实验目的及要求 二,设计容简介 四,电路工作原理简述 三,设计电路总体原理框图五,各单元电路原理及逻辑设计 1. 脉冲发生电路 2. 计时电路和显示电路 3. 报时电路 4. 较分电路 六引脚图及真值表
七收获体会及建议 八设计参考资料 一,实验目的及要求 1,掌握常见集成电路实现单元电路的设计过程。 2,了解各单元再次组合新单元的方法。 3,应用所学知识设计可以实现00’00”—59’59”的可整点报时的数字计时器 二,设计容简介: 1,设计实现信号源的单元电路。( KHz F Hz F Hz F Hz F1 4 , 500 3 , 2 2 , 1 1≈ ≈ ≈ ≈ ) 2,设计实现00’00”—59’59”计时器单元电路。 3,设计实现快速校分单元电路。含防抖动电路(开关k1,频率F2,校分时秒计时器停止)。4,加入任意时刻复位单元电路(开关K2)。 5,设计实现整点报时单元电路(产生59’53”,59’55”,59’57”,三低音频率F3,59’59”一高音频率F4)。 三,设计电路总体原理框图 设计框图: 四,电路工作原理简述 电路由振荡器电路、分频器、计数器、译码器、显示器、校时电路和报时电路组成。振荡器产生的脉冲信号经过十二级分频器作为秒脉冲,秒脉冲送入计数器,计数器通过“时”、“分”、“秒”译码器显示时间,将分秒计时器分开,加入快速校分电路与防抖动电路,并控制秒计
时器停止工作。较分电路实现对“分”上数值的控制,而不受秒十位是否进位的影响,在60进制控制上加入任意时刻复位电路。报时电路通过1kHz或2kHz的信号和要报时的时间信号进行“与”的运算来实现的顶点报时的,通过两个不同频率的脉冲信号使得在不同的时间发出不同的声响。 五,各单元电路原理及逻辑设计 (1)脉冲发生电路 脉冲信号发生电路是危机时期提供技术脉冲,此次实验要求产生1HZ的脉冲信号。用NE555集成电路和CD4040构成。555定时器用来构成多谐振荡器,CD4040产生几种频率为后面电路使用。 实验电路如下(自激多谐振荡电路,周期矩形波发生电路) 震荡周期T=0.695(R1+2*R2)C,其中R1=1KΩ,R2=3KΩ,C=0.047uf,计算T=228.67*10-6 s ,f=4373.4Hz产生的脉冲频率为4KHz,脉冲信号发生电路 和CD4040连接成如图所示的电路,则从Q12输出端可以得到212分频信号F1,即1Hz的信号,Q11可以得到F2即2Hz的信号提供给D触发器CP和校分信号,Q3输出分频信号500Hz,Q2输出1KHz提供给报时电路 二,秒计时电路 应用CD4518及74LS00可以设计该电路,CD4518是异步清零,所以在进行分和秒十位计数的时候,需要进行清零,而在个位计数的时候不需要清零。所以Cr2=2QcQb,Cr4=4Qc4QB。当秒个位为1001时,秒十位要实现进位,此时需要EN2=1Qd,同理分的个位时钟EN3=2Qc,分十位时钟端EN4=3Qd。因此,六十进制计数器逻辑电路如下图所示
实验 一 利用MATLAB 进行线性系统的 模型转换及联结 实验目的: 1、学习系统状态空间模型的建立方法、了解状态空间模型与传递函数、零极点模型之间相互转换的方法; 2、通过编程、上机调试,掌握系统状态空间模型与传递函数相互转换的方法。 3、通过编程、上机调试,掌握系统模型的联结方法。 实验原理: 一、连续系统 (1)状态空间模型 x Ax Bu y Cx Du =+=+ (1.1) 其中:n x R ∈是系统的状态向量,m u R ∈是控制输入,p y R ∈是测量输出,A 是n n ?维状态矩阵、B 是n m ?维输入矩阵、C 是p n ?维输出矩阵、D 是直接转移矩阵。在MA TLAB 中,用(A,B,C,D )矩阵组表示。 系统传递函数和状态空间模型之间的关系如式(1.2)所示。 1()()G s C sI A B D -=-+ (1.2) (2)传递函数模型 11101110 ()(),()m m m m n n n n b s b s b s b num s H s m n den s a s a s a s a ----++++==≤++++ 在MA TLAB 中,直接用分子/分母的系数表示 1010[,,,] [,,,] m m n n num b b b den a a a --== (3)零极点增益模型 1212()()()()()()() m n s z s z s z H s k s p s p s p ---=--- 在MA TLAB 中,用[z, p, k]矢量组表示,即
1212[,,,]; [,,,];[]; m n z z z z p p p p k k === 例1.1 求由以下状态空间模型所表示系统的传递函数, []1122331230100001255255120100x x x x u x x x y x x ????????????????=+????????????????----????????????=?????? 编写并执行以下的m-文件: A=[0 1 0;0 0 1;-5 –25 –5]; B=[0;25;-120]; C=[1 0 0]; D=[0]; [num,den]=ss2tf(A,B,C,D) 得到: num= 0 -0.0000 25.0000 5.0000 den= 1.0000 5.0000 25.0000 5.0000 因此,所求系统的传递函数是 32255()5255 s G s s s s +=+++ 例1.2 考虑由以下状态空间模型描述的系统: 11122211220111254011001x x u x x u y u y u ??????????=+??????????--????????????????=??????? ????? 求其传递函数矩阵。 解 这是一个2输入2输出系统。描述该系统的传递函数是一个22?维矩阵,它包括4个传递函数: 11122122()()()()()()()()Y s U s Y s U s Y s U s Y s U s ??????
江苏省南通市2009届高三生物最后冲刺之三 专题三现代生物科技专题 一、选择题 1.以下说法正确的是() ①发酵工程获得优良菌种的方法有:诱变育种、杂交育种、细胞工程等 ②吞噬细胞和效应B细胞都能识别抗原 ③紫茉莉遗传物质的载体是染色体、线粒体、叶绿体 ④发生过敏反应时,往往会使细胞损伤、破坏和引起支气管痉挛等 A.①②③④B.③④C.②④D.③ 2.如图,在一定时间内使某种动物细胞吸收放射性同 位素标记的氨基酸依次先后出现在图中1、2、3、4、 5部位。在这一过程中分泌蛋白通过的生物膜磷脂分 子层数是() A.4层 B.3层 C.2层 D.0层 3.下面对生物工程的应用成果说法正确的是() ①用白血病患者细胞中分离出的癌基因制备DNA探针可检测肝炎 ②鸡蛋白基因可在大肠杆菌或酵母菌中表达出卵清蛋白 ③在单抗上连接抗癌药物可制成定向消灭癌细胞的“生物导弹” ④利用发酵工程可获得大量微生物的代谢产物即单细胞蛋白 A.①②B.③④C.②③D.①④ 4.运用下列各种细胞工程技术培育生物新品种,操作过程中能形成愈伤组织的是() ①植物组织培养②植物体细胞杂交⑧动物细胞培养④转基因植物的培育 A.①②⑧ B.①②④ C.①⑧④ D.①②⑧④ 5.原核生物中某一基因的编码区起始端插入了一个碱基对。在插入位点的附近,再发生下列哪种情况有可能对其编码的蛋白质结构影响最小() A.置换单个碱基对 B.增加4个碱基对 C.缺失3个碱基对 D.缺失4个碱基对 6.某同学在学习“细胞工程”时,列表比较了动植物细胞工程的有关内容,你认为错误的 7.有三个盛放葡萄糖液的密封瓶,已知一瓶混有酵母菌,一瓶混有乳酸菌,一瓶只有葡萄糖,
实验三 利用MATLAB 导出连续状态空间模型的离散化模型 实验目的: 1、基于对象的一个连续时间状态空间模型,导出其相应的离散化状态空间模型; 2、通过编程、上机调试,掌握离散系统运动分析方法。 实验原理: 给定一个连续时间系统的状态空间模型: ()()()()()() x t Ax t Bu t y t Cx t Du t =+=+ (3.1) 状态空间模型(3.1)的输入信号()u t 具有以下特性: ()(),u t u kT kT t kT T =≤≤+ (3.2) 已知第k 个采样时刻的状态()x kT 和第k 个采样时刻到第1k +个采样时刻间的输入()()u t u kT =,可得第1k +个采样时刻(1)k T +处的状态 (1)((1))((1))()((1))()k T kT x k T k T kT x kT k T Bu d τττ++=Φ+-+Φ+-? (3.3) 其中: ((1))((1))A k T kT AT k T kT e e +-Φ+-== ((1))((1))A k T k T e ττ+-Φ+-= 由于输入信号在两个采样时刻之间都取常值,故对式(3.3)中的积分式进行一个时间变量替换(1)k T στ=+-后,可得 0((1))()()()AT A x k T e x kT e d Bu kT τ σσ+=+? (3.4) 另一方面,以周期T 对输出方程进行采样,得到 ()()()y kT Cx kT Du kT =+ 在周期采样的情况下,用k 来表示第k 个采样时刻kT 。因此,连续时间状态空间模型
(3.1)的离散化方程可以写成 (1)()()()()()()() x k G T x k H T u k y k Cx k Du k +=+=+ (3.5) 其中: 0()()()AT A G T e H T e d B τσσ==? (3.6) 已知系统的连续时间状态空间模型,MATLAB 提供了计算离散化状态空间模型中状态矩阵和输入矩阵的函数: [G ,H]=c2d(A,B,T) 其中的T 是离散化模型的采样周期。 实验步骤 1、导出连续状态空间模型的离散化模型,采用MA TLAB 的m-文件编程; 2、在MA TLAB 界面下调试程序,并检查是否运行正确。 例3.1 已知一个连续系统的状态方程是 010()()()2541x t x t u t ????=+????--???? 若取采样周期0.05T =秒,试求相应的离散化状态空间模型。 编写和执行以下的m-文件: A=[0 1;-25 –4]; B=[0;1]; [G ,H]=c2d(A,B,0.05) 得到 G= 0.9709 0.0448 -1.1212 0.7915 H= 0.0012 0.0448 因此,所求的离散化状态空间模型是 0.97090.04480.0012(1)()()1.12120.79150.0448x k x k u k ????+=+????-????
科研项目 《电子设计竞赛的开展与学生创新能力培养的研究》 结题报告 前言 课题研究的背景与意义 进入二十一世纪,知识经济已现端倪,国力竞争日趋激烈。知识经济呼唤素质教育,实施素质教育的重点是要培养学生的创新精神和实践能力。《高等教育法》第五条也规定:“高等教育的任务是培养具有创新精神和实践能力的高级专门人才”,可见高等学校在国家创新体系中有着非常重要的地位。 创造力是创新人才的根本标志。正如哈佛大学校长陆登庭认为:“一个人是否具有创造力,是一流人才与三流人才的主要区别”。创新人才除应具备一般人才的特征外,还应具有强烈的创新意识、创新精神和创新能力,也就是要具备创新素质的人才。创新人才不但要在知识、能力和素质诸方面要协调发展,还需具有丰富的想象、敏锐的思维、鲜明的个性、敢于批判、勇于开拓的精神、强烈的责任感等。 实践是创新的源泉,历史上重大的科技创新成果大多来源于实践。心理学研究和教育实践证明,创新精神和创造能力是人的素质中最重要、最有活力且最具有社会价值的那一部分,也是人类共同和普遍具有的潜能。但不当的教育往往会使人长大之后失去创造性。正如马洛斯曾指出的:“创造性是任何儿童都具有而大多数人长大以后又会失去的”。因此,如何充分激发学生的创新意识、努力培养他们的创新精神和创新能力,并使他们保持良好的创新欲望,是
高等院校实施创新教育应着重解决的问题。 实施创新教育必须要“手脑并用”、“知行合一”,要在实践中培养创新意识与创新能力,从而提高综合素质。通过实践和训练,不仅能牢固掌握已学过的知识,而且也锻炼了运用知识分析、解决问题的能力,培养了创新思维和创新能力。 实践证明,学科竞赛是培养学生创新精神,提高学生动手能力的有效形式。全国大学生电子设计竞赛作为国家教育部倡导的四项学科竞赛之一,在培养学生动手能力和综合素质方面发挥了极为重要的作用。竞赛为参赛学生提供了综合运用所学过的知识、发挥想象力和创新能力的机会和思维空间。学生通过参加竞赛,可以培养他们查阅资料能力、自学能力、分析问题与解决问题的能力、综合设计与调试能力、科技论文写作能力,可以培养了他们理论联系实际的作风、团结协作精神和创新意识。因此,受到了大学生的普遍欢迎,报名参赛的学校和参赛的学生人数呈逐年递增的趋势。 1、项目研究的预期目标 1.1.以电子信息学科为依托,进行机构调整与课程的整合与优化; 1.2.调整电子技术实验系列课程,建立现代电子技术实验课程教学体系; 1.3.建立四个层次的实验教学模式: ①基础实验;②设计性实验;③综合设计性实验;④设计研究性实验。 1.4.组织课题成员和系部老师参加全国、全区大学生电子设计竞赛力争 获奖以检验课题的实战效果。