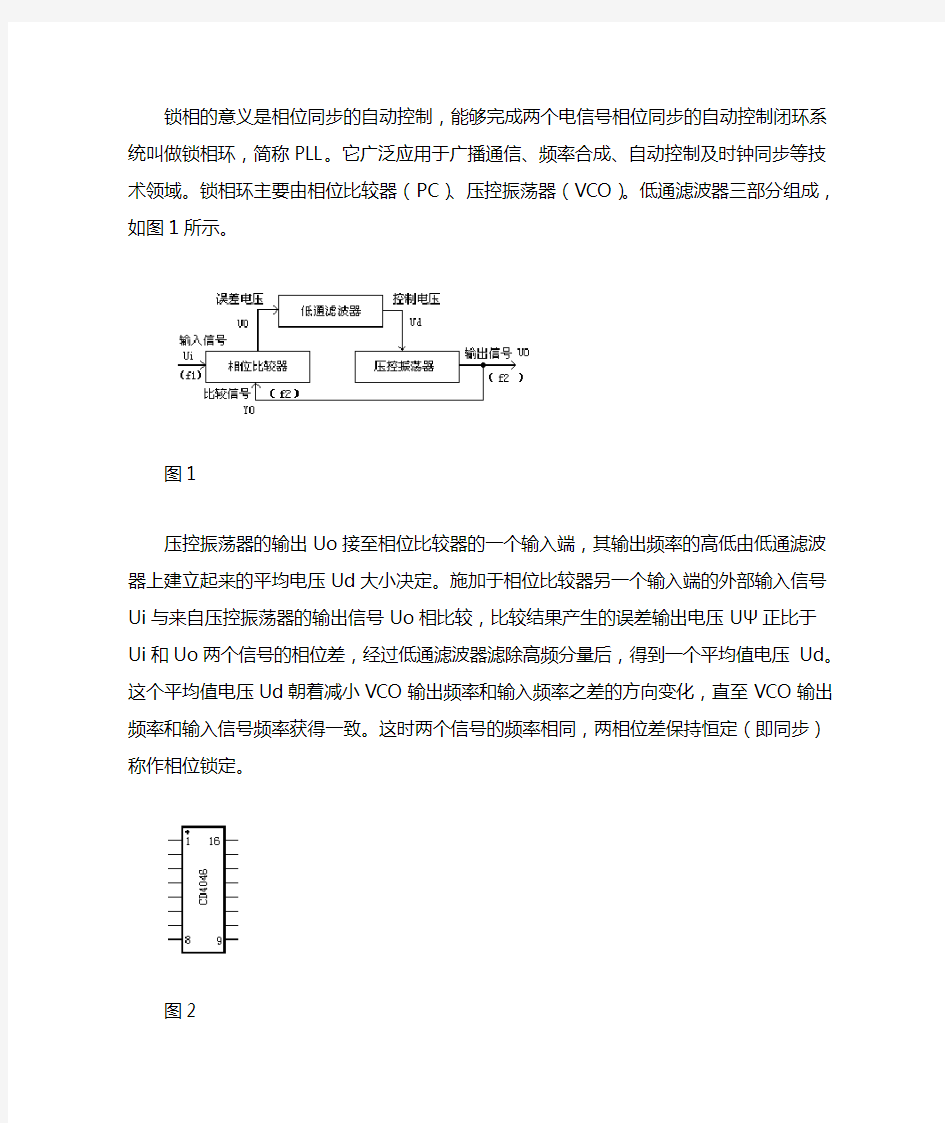
锁相的意义是相位同步的自动控制,能够完成两个电信号相位同步的自动控制闭环系统叫做锁相环,简称PLL。它广泛应用于广播通信、频率合成、自动控制及时钟同步等技术领域。锁相环主要由相位比较器(PC)、压控振荡器(VCO)。低通滤波器三部分组成,如图1所示。
图1
压控振荡器的输出Uo接至相位比较器的一个输入端,其输出频率的高低由低通滤波器上建立起来的平均电压Ud大小决定。施加于相位比较器另一个输入端的外部输入信号Ui与来自压控振荡器的输出信号Uo相比较,比较结果产生的误差输出电压UΨ正比于Ui和Uo两个信号的相位差,经过低通滤波器滤除高频分量后,得到一个平均值电压Ud。这个平均值电压Ud朝着减小VCO输出频率和输入频率之差的方向变化,直至VCO输出频率和输入信号频率获得一致。这时两个信号的频率相同,两相位差保持恒定(即同步)称作相位锁定。
图2
当锁相环入锁时,它还具有“捕捉”信号的能力,VCO可在某一范围内自动跟踪输入信号的变化,如果输入信号频率在锁相环的捕捉范围内发生变化,锁相环能捕捉到输人信号频率,并强迫VCO锁定在这个频率上。锁相环应用非常灵活,如果输入信号频率f1不等于VCO输出信号频率f2,而要求两者保持一定的关系,
例如比例关系或差值关系,则可以在外部加入一个运算器,以满足不同工作的需要。过去的锁相环多采用分立元件和模拟电路构成,现在常使用集成电路的锁相环, CD4046是通用的CMOS锁相环集成电路,其特点是电源电压范围宽(为 3V -18V),输入阻抗高(约100MΩ),动态功耗小,在中心频率f0为10kHz下功耗仅为600μW,属微功耗器件。图2是CD4046的引脚排列,采用 16 脚双列直插式,各引脚功能如下:
1 脚相位输出端,环路人锁时为高电平,环路失锁时为低电平。2脚相位比较器Ⅰ的输出端。3脚比较信号输入端。4脚压控振荡器输出端。5脚禁止端,高电平时禁止,低电平时允许压控振荡器工作。6、7脚外接振荡电容。8、16脚电源的负端和正端。9脚压控振荡器的控制端。10脚解调输出端,用于FM解调。11、12脚外接振荡电阻。13脚相位比较器Ⅱ的输出端。 14脚信号输入端。15脚内部独立的齐纳稳压管负极。
图3
图3 是CD4046内部电原理框图,主要由相位比较Ⅰ、Ⅱ、压控振荡器(VCO)、
线性放大器、源跟随器、整形电路等部分构成。比较器Ⅰ采用异或门结构,当两个输人端信号Ui、Uo的电平状态相异时(即一个高电平,一个为低电平),输出端信号UΨ为高电平;反之,Ui、Uo电平状态相同时(即两个均为高,或均为低电平),UΨ输出为低电平。当Ui、Uo的相位差Δφ在0°- 180°范围内变化时,UΨ的脉冲宽度m亦随之改变,即占空比亦在改变。从比较器Ⅰ的输入和输出信号的波形(如图4所示)可知,其输出信号的频率等于输入信号频率的两倍,并且与两个输入信号之间的中心频率保持90°相移。从图中还可知,fout 不一定是对称波形。对相位比较器Ⅰ,它要求Ui、Uo的占空比均为50%(即方波),这样才能使锁定范围为最大。
图4
相位比较器Ⅱ是一个由信号的上升沿控制的数字存储网络。它对输入信号占空比的要求不高,允许输入非对称波形,它具有很宽的捕捉频率范围,而且不会锁定在输入信号的谐波。它提供数字误差信号和锁定信号(相位脉冲)两种输出,当达到锁定时,在相位比较器Ⅱ的两个输人信号之间保持0°相移。
对相位比较器Ⅱ而言,当14脚的输入信号比3脚的比较信号频率低时,输出为逻辑“0”;反之则输出逻辑“1”。如果两信号的频率相同而相位不同,当输人信号的相位滞后于比较信号时,相位比较器Ⅱ输出的为正脉冲,当相位超前时则输出为负脉冲。在这两种情况下,从1脚都有与上述正、负脉冲宽度相同的负脉冲产生。从相位比较器Ⅱ输出的正、负脉冲的宽度均等于两个输入脉冲上升沿之间的相位差。而当两个输入脉冲的频率和相位均相同时,相位比较器Ⅱ的输出为高阻态,则1脚输出高电平。上述波形如图5所示。由此可见,从1脚输出信号是负脉冲还是固定高电平就可以判断两个输入信号的情况了。
图5
CD4046 锁相环采用的是RC型压控振荡器,必须外接电容C1和电阻R1作为充放电元件。当PLL对跟踪的输入信号的频率宽度有要求时还需要外接电阻R2。由于 VCO是一个电流控制振荡器,对定时电容C1的充电电流与从9脚输入的控制电压成正比,使VCO的振荡频率亦正比于该控制电压。当VCO控制电压为0时,其输出频率最低;当输入控制电压等于电源电压VDD时,输出频率则线性地增大到最高输出频率。VCO振荡频率的范围由R1、R2和C1决定。由于它的充电和放电都由同一个电容C1完成,故它的输出波形是对称方波。一般规定 CD4046的最高频率为1。2MHz(VDD=15V),若VDD<15V,则fmax要降低一些。
CD4046 内部还有线性放大器和整形电路,可将14脚输入的100mV左右的微弱输入信号变成方波或脉冲信号送至两相位比较器。源跟踪器是增益为1的放大器,VCO 的输出电压经源跟踪器至10脚作FM解调用。齐纳二极管可单独使用,其稳压值为5V,若与TTL电路匹配时,可用作辅助电源。
综上所述,CD4046工作原理如下:输入信号 Ui从14脚输入后,经放大器A1
进行放大、整形后加到相位比较器Ⅰ、Ⅱ的输入端,图3开关K拨至2脚,则比较器Ⅰ将从3脚输入的比较信号Uo与输入信号 Ui作相位比较,从相位比较器输出的误差电压UΨ则反映出两者的相位差。UΨ经R3、R4及C2滤波后得到一控制电压Ud加至压控振荡器VCO的输入端9 脚,调整VCO的振荡频率f2,使
f2迅速逼近信号频率f1。VCO的输出又经除法器再进入相位比较器Ⅰ,继续与Ui进行相位比较,最后使得f2=f1,两者的相位差为一定值,实现了相位锁定。若开关K拨至13脚,则相位比较器Ⅱ工作,过程与上述相同,不再赘述。
1 引言
锁相环(pll)是一种能跟踪输入信号相位的闭环自动控制系统。它在无线电技术的各个领域都得到了广泛的应用。集成环路部件以其低成本、性能优良、使用简便而得到了青睐。它在频率调制与解调、频率合成、电视机彩色副波提取、fm 立体声解码、遥控系统、频率的编码和译码等诸多方面均得到了利用。本文介绍了集成锁相环cd4046在频率的调制与解调方面的应用。
2 集成锁相环cd4046介绍
2.1 cd4046结构及性能特点
它的内部结构框图如图1所示。
它是低功耗cmos型、多功能数字环。主要参数如下:(1)工作电压3v-18v;(2)静态工作电流(15端开路)10ua;(3)最高工作频率为1.2mhz;(4)稳压管稳定电压4. 45v-6.15v。它含有两个相位比较器pc?与pcii。pc?要求输入信号为方波,pci i则无此要求,有一个压控(频率)振荡器vco。在两个相位比较器的输入端有一个前置放大器,可把100mv的微弱信号变为满电平的方波脉冲。a2是低滤波器输出缓冲放大器。cd4046采用16线双列直插式封装,各管脚功能如附表所示:
图1 cd4046内部结构框图
2.2 cd4046构成频率调制与解调电路的工作原理
当从9脚输入音频信号时,从4端可输出受输入信号调制的调频信号。电路如图2所示,由于调频时要求vco有一定的频率范围(频偏),所以不用r2收缩频带,即r2为无穷大(12脚空置)仅用r1和c1确定vco的中心频率f0即可。设计参数时,只需由f0查图4(电源电压vdd为9v时的曲线,横坐标为c1取值)求出c 1与r1即可。
图2 cd4046构成的频率调制电路
当从14脚输入一被音频信号调制的(中心频率与cd4046的vco的中心频率相同)调频信号,则相位比较器输出端将输出一个与音频信号具有相同变化频率的包络信号,经低通滤波器滤去载波后,即剩下调频信号解调后的音频信号了。一般使用pci,这时仅由r1和c1确定vco的中心频率f0,而不用r2来收缩频率范围(其为无穷大)。同样,由图4查图求r1与c1。无调频信号输入时,vco工作在f0上。解调电路如图3所示。
附表 cd4046管脚功能表
3 实际电路介绍
下面介绍的是频率调制红外线通话器,分为发射与接收电路两部分。如图5与图6所示,
图3 cd4046构成的频率解调电路
图4 cd4046在不同外部元件参数下的特性曲线
图5 发射电路
发射器由话筒mic发出的微弱信号,经5g28构成的反相放大器放大后,(运放为单电源供电,r1与r2将运放的同相输入端偏置在1/2电源电压,从而使其输出端也为1/2电源电压,放大器有较大的动态范围)经c3耦合到cd4046内部压控振荡器的控制脚9端,其压控振荡器的输出端4脚输出受9脚音频信号调制的调制信号。cd4046的中心频率由r4和c4确定,约为100khz。r4、c4的参数在设计时由选中的f0和图4查表得到。无音频信号时,锁相环工作中心频率f0上。使得cmos锁相环具有频率调制线性好,调制指数大,功耗低等优点。调频信号经vt驱动发光二极管vd1-vd4向外辐射红外线脉冲。接收电路中,vt为光敏三极管,它直接接在运放的反相输入端,由运放放大后经c1耦合到cd4046的相位比较器的输入端14脚。解调电路的中心频率与发射器的中心频率是一致的,也为100khz(c3、r4与发射器的c4、r4相同)。cd4046的10脚为压控振荡器的控制端,即解调信号输出端,2脚为相位比较器的输出端,比较器信号经r5和c4构成低通滤波器后再接9脚。9脚的解调信号经cd4046内部运放构成的跟随器缓冲后由10脚输出。cd4046的4脚为压控振荡器的输出端,3脚为相位比较器
的比较输入端,它们连在一起。cd4046输出的解调音频信号经c4耦合到vt2,由vt2驱动扬声器发声。发射器中,mic用动圈话筒,vt用cs9013,vd1-vd4
用hir405b红外线发光二极管;接收器中vt1用3u31光敏三极管,vt2用cs805 0。
图6 接收电路
4 结束语
利用锁相环的调制跟踪特性,设计的电路,具有外围元器件少、性能稳定、功能强大的特点。随着微电子技术、计算机技术的发展以及芯片生产工艺水平的提高,相信更先进的、功能更强大的、价格便宜的(甚至是带有智能化的)锁相环产品会不断出现。
参考文献
[1] 张厥盛,郑继禹,万心平. 锁相技术[m]. 西安:西安电子科技大学出版社,1994.
[2] 阿兰.布兰查德. 锁相环及其在相干接收机设计中应用[m]. 北京:人民邮电
出版社, 1980.
[3] 万心平,张厥盛. 集成锁相环路-原理、特性、应用[m]. 北京:人民邮电出版社 1990.
作者简介
邓重一(1962-) 男讲师研究方向为检测技术、信号处理及eda技术。
https://www.doczj.com/doc/a05516152.html,/p-47738136.html#
幅度/相位调制 过去几十年随着数字信号处理技术与硬件水平的发展,数字收发器性价比已远远高于模拟收发器,如成本更低,速度更快,效率更高。更重要的是数字调制比模拟调制有更多优点,如高频谱效率,强纠错能力,抗信道失真以及更好的保密性。正是因为这些原因,目前使用的无线通信系统都是数字系统。 数字调制和解调的目的就是将信息以比特形式(0/1)通过信道从发送机传输到接收机。数字调制方式主要分为两类:1)幅度/相位调制和2)频率调制。两类调制方式分别又成为线性调制和非线性调制,在优劣势上也各有不同,因此,调制方式的选择最终还需要取决于多方面的最佳权衡。 本文就对幅度/相位调制加以讨论,全文整体思路如下: 1 信号空间分析 在路径损耗与阴影衰落中已提出发送信号与接收信号的模型以复信号的实部来表示,而在本文中为了便于分析各调制解调技术,我们必须引入信号的几何表示。 数字调制将信号比特映射为几种可能的发送信号之一,因此,接收机需要对各个可能的发送信号做比较,从而找出最接近的作为检测结果。为此我们需要一个度量来反映信号间的距离,即将信号投影到一组基函数上,将信号波形与向量一一对应,这样就可以利用向量空间中的距离概念来比较信号间的距离。 1.1 信号的几何表示 向量空间中各向量可由其基向量表示,而在无线通信中,我们也可把信号用其相应的基函数来表示。本文我们讨论的幅度/相位调制的基函数就是由正弦和余弦函数组成的: 21()()cos (2)c t g t f t φπ=(1) 22()()sin (2)c t g t f t φπ=(2) 其中g (t )是为了保证正交性,即保证 220()cos (2)1T c g t f t dt π=? (3) 20()cos(2)sin(2)0T c c g t f t f t dt ππ=? (4) 则信号可表示为 12()()cos(2)()sin(2)i i c i c s t s g t f t s g t f t ππ=+ (5) 则向量s i =[s i1,s i2]T 便构成了信号s i (t )的信号星座点,所有的星座点构成信号星座图,我们把信号s i (t )用其星座点s i 表示的方法就叫做信号的几何表示。而两个星座点s i 和s k 之间的距离就是采用向量中长度的定义,这里不再赘述。 2 幅度/相位调制 相位/幅度调制主要分为3种: 1)脉冲幅度调制(MPAM):只有幅度携带信息;
锁相环路相位噪声分析 张文军 电信0802 【摘要】本文对锁相电路的相位噪声进行了论述,并对其中各组成部件的相位噪声也做了较为详细的分析。文中最后提出了改进锁相环相位噪声的办法。 【关键词】锁相环;相位噪声;分析 引言 相位噪声是一项非常重要的性能指标,它对电子设备和电子系统的影响很大,从频域看它分布的载波信号两旁按幂律谱分布。用这种信号无论做发射激励信号,还是接收机本振信号以及各种频率基准,这些信号在解调过程中都会和信号一样出现在解调终端,引起基带信噪比下降。在通信系统中使环路信噪比下将,误码率增加;在雷达系统中影响目标的分辨能力,即改善因子。接收机本振的相位噪声遇到强干扰信号时,会产生“倒混频”,使接收机有效噪声系数增加。随着电子技术的发展,对频率源的信号噪声要求越来越严格,因此低相位噪声在物理、天文、无线电通信、雷达、航空、航天以及精密计量、仪器仪表等各种领域里都受到重视。 1 相位噪声概述 相位噪声 ,就是指在系统内各种噪声作用下所表现的相位随机起伏,相位的随机 起伏起必然引起频率随机起伏,这种起伏速度较快,所以又称之为短期频率稳定度。 理想情况下,合成器的输出信号在频域中为根单一的谱线,而实际上任何信号的频谱都不可能绝对纯净,总会受到噪声的调制产生调制边带。由于相位噪声的存在,使波形发生畸变。在频域中其输出信号的谱线就不再是一条单根的谱线,而是以调制边带的形式连续地分布在载波的两边,在主谱两边出现了一些附加的频谱,从而导致频谱的扩展,相位噪声的边带是双边 的,是以0f 为中心对称的,但为了研究方便,一般只取一个边带。其定义为偏离载频1Hz 带宽内单边带相位噪声的功率与载频信号功率之比,它是偏离 载频的复氏频率m f 的函 数 ,记为 () m f ζ,单位为d B c / Hz ,即 ()010lg[/](1) m SSB f P P ζ= 式中SSB P 为偏离载频m f 处,1Hz 带宽内单边带噪声功率;0P 为载波信号功率。
1.锁相环的基本原理和模型 在并网逆变器系统中,控制器的信号需要与电网电压的信号同步,锁相环通过检测电网电压相位与输出信号相位之差,并形成反馈控制系统来消除误差,达到跟踪电网电压相位和频率的目的。一个基本的锁相环结构如图1-1所示,主要包括鉴相器,环路滤波器,压控振荡器三个部分。 图1-1 基本锁相环结构 鉴相器的主要功能是实现锁相环输出与输入的相位差检测;环路滤波器的主要作用应该是建立输入与输出的动态响应特性,滤波作用是其次;压控振荡器所产生的所需要频率和相位信息。 PLL 的每个部分都是非线性的,但是这样不便于分析设计。因此可以用近似的线性特性来表示PLL 的控制模型。 鉴相器传递函数为:)(Xo Xi Kd Vd -= 压控振荡器可以等效为一个积分环节,因此其传递函数为:S Ko 由于可以采用各种类型不同的滤波器(下文将会讲述),这里仅用)(s F 来表示滤波器的传递函数。 综合以上各个传递函数,我们可以得到,PLL 的开环传递函数,闭环传递函数和误差传递函数分别如下: S s F K K s G d o op )()(=,)()()(s F K K S s F K K s G d o d o cl +=,) ()(s F K K S S s H d o += 上述基本的传递函数就是PLL 设计和分析的基础。 2.鉴相器的实现方法 鉴相器的目的是要尽可能的得到准确的相位误差信息。可以使用线电压的过零检测实现,但是由于在电压畸变的情况下,相位信息可能受到严重影响,因此需要进行额外的信号处理,同时要检测出相位信息,至少需要一个周波的时间,动态响应性能可能受到影响。 一般也可以使用乘法鉴相器。通过将压控振荡器的输出与输入相乘,并经过一定的处理得到相位误差信息。 在实际的并网逆变器应用中还可以在在同步旋转坐标系下进行设计,其基本的目的也是要得的相差的数值。同步旋转坐标系下的控制框图和上图类似,在实际使用中,由于pq 理论在电网电压不平衡或者发生畸变使得性能较差,因而较多的使用dq 变换,将采样得到的三相交流电压信号进行变化后与给定的直流参考电压进行比较。上述两种方法都使用了近似,利用在小角度时正弦函数值约等于其角度,因而会带来误差,这个误差是人为近似导致的误差,与我们要得到的相位误差不是一个概念,最终的我们得到相位误差是要形成压控振荡器的输入信号,在次激励下获得我们所需要的频率和相位信息。 2.1乘法鉴相器
相位噪声和抖动jitter的概念及估算方法 时钟频率的不断提高使和在系统时序上占据日益重要的位置。本文介其概念及其对系统性能的影响,并在电路板级、芯片级和单元模块级分别提供了减小相位噪声和抖动的有效方法。 随着通信系统中的时钟速度迈入GHz级,相位噪声和抖动这两个在模拟设计中十分关键的因素,也开始在数字芯片和电路板的性能中占据日益重要的位置。在高速系统中,时钟或振荡器波形的时序误差会限制一个数字I/O接口的最大速率,不仅如此,它还会增大通信链路的误码率,甚至限制A/D转换器的动态范围。 在此趋势下,高速数字设备的设计师们也开始更多地关注时序因素。本文向数字设计师们介绍了相位噪声和抖动的基本概念,分析了它们对系统性能的影响,并给出了能够将相位抖动和噪声降至最低的常用电路技术。 什么是相位噪声和抖动? 相位噪声和抖动是对同一种现象的两种不同的定量方式。在理想情况下,一个频率固定的完美的脉冲信号(以1 MHz为例)的持续时间应该恰好是1微秒,每500ns有一个跳变沿。 但不幸的是,这种信号并不存在。如图1所示,信号周期的长度总会有一定变化,从而导致下一个沿的到来时间不确定。这种不确定就是相位噪声,或者说抖动。 抖动是一个时域概念 抖动是对信号时域变化的测量结果,它从本质上描述了信号周期距离其理想值偏离了多少。通常,10 MHz以下信号的周期变动并不归入抖动一类,而是归入偏移或者漂移。抖动有两种主要类型:确定性抖动和随机性抖动。确定性抖动是由可识别的干扰信号造成的,这种抖动通常幅度有限,具备特定的(而非随机的)产生原因,而且不能进行统计分析。造成确定性抖动的来源主要有4种: 1. 相邻信号走线之间的串扰:当一根导线的自感增大后,会将其相邻信号线周围的感应磁场转化为感应电流,而感应电流会使电压增大或减小,从而造成抖动。 2. 敏感信号通路上的EMI辐射:电源、AC电源线和RF信号源都属于EMI源。与串扰类似,当附近存在EMI辐射时,时序信号通路上感应到的噪声电流会调制时序信号的电压值。 3. 多层基底中电源层的噪声:这种噪声可能改变逻辑门的阈值电压,或者改变阈值电压的参考地电平,从而改变开关门电路所需的电压值。
MATLAB仿真信号的相位调制与解调 专业:通信与信息系统 姓名:赵* 学号:********* 指导老师:****教授
摘要 Psk调制是通信系统中最为重要的环节之一,Psk调制技术的改进也是通信系统性能提高的重要途径。本文首先分析了数字调制系统的基本调制解调方法,然后,运用Matlab及附带的图形仿真工具——Simulink设计了这几种数字调制方法的仿真模型。通过仿真,观察了调制解调过程中各环节时域和频域的波形,并结合这几种调制方法的调制原理,跟踪分析了各个环节对调制性能的影响及仿真模型的可靠性。最后,在仿真的基础上分析比较了各种调制方法的性能,并通过比较仿真模型与理论计算的性能,证明了仿真模型的可行性。另外,本文还利用Matlab的图形用户界面(GUI)功能为仿真系统设计了一个便于操作的人机交互界面,使仿真系统更加完整,操作更加方便。 关键词:数字调制;分析与仿真;Matlab;Simulink;PSK;QPSK;
1.数字调制技术 (2) 2.PSK调制系统 (3) 2.1 QPSK调制部分,原理框图如图七所示 (6) 2.2 QPSK解调部分,原理框图如图八所示: (8) 3.用Simulink实现PSK调制 (9) 3.1 2PSK仿真 (9) 3.1.1调制 (9) 3.1.2 解调仿真 (12) 3.2 QPSK仿真 (13) 3.2.1 QPSK调制框图 (13) 参考文献 (18)
1.数字调制技术 通信按照传统的理解就是信息的传输与交换。在当今信息社会,通信则与遥感,计算技术紧密结合,成为整个社会的高级“神经中枢”。没有通信,人类社会是不可想象的。一般来说,社会生产力水平要求社会通信水平与之相适应。若通信水平跟不上,社会成员之间的合作程度就受到限制。可见,通信是十分重要的。 通信传输的消息是多种多样的,可以是符号的,文字的,数据和图像的等等。各种不同的消息可以分为两类:一类称为离散消息;另一类称为连续消息。离散消息的状态是可数的或离散的,比如符号,文字或数据等。离散消息也称数字消息。而连续消息则是其状态连续变化的消息,例如,连续变化的语音,图像等。连续消息也称模拟消息。因此按照信道中传输的是模拟信号还是数字信号可以将通信系统分为模拟通信系统和数字通信系统。 数字通信有以下突出的特点:第一,数字信号传输时,信道噪声或干扰所造成的差错,原则上是可以控制的。第二,当需要保密的时候,可以有效的对基带信号进行人为的“扰乱”,即加上密码。 数字通信系统可以用下图表示: →→→→→→→→信数信信数信 信源 道 字受道源字信 息编编调 解译译信 源 码码调码码者 制 道 器 器 器 器 器 器 图一 数字通信在近20年来得到了迅速的发展,其原因是: (1) 抗干扰能力强 (2) 便于进行各种数字信号处理 (3) 易于实现集成化 (4) 经济效益正赶上或超过模拟通信 (5) 传输与交换可结合起来,传输电话与传输数据也可结合起来,成为一个 统一整体,有利于实现综合业务通信网。
锁相环相位噪声与环路带宽的关系分析 2009-09-09 15:13:17 作者:李仲秋曾全胜来源:现代电子技术 关键字:电荷泵锁相环相位噪声功率谱密度环路带宽 0 引言 电荷泵锁相环是闭环系统,系统各个部分都是一个噪声源,各部分噪声的大小不仅与电路本身有关,而且还与环路带宽等因素有关。因此,设计时必须分析其各频率范围内噪声源影响力的大小,权衡确定环路带宽与各噪声源的相互制约关系。以下利用锁相环的等效噪声模型,重点分析电荷泵锁相环系统的相位噪声特性,得出系统噪声特性的分布特点以及与环路带宽的关系。 1 电荷泵锁相环的基本原理 图1为电荷泵锁相环的示意图,主要由鉴相鉴频器(PFD)、电荷泵、滤波器、压控振荡器(VCO)、分频器等5部分组成,鉴相鉴频器主要用来检测输入信号x(t)与反馈信号xf(t)的频率、相位误差,并产生UP,DOWN信号控制电荷泵的开关。电荷泵由两个对称的电流源和开关组成。电荷泵的开关会对滤波器上的电容充放电,电流经过滤波器滤波后滤掉高频信号,在滤波器上产生能调整压控振荡器频率和相位的电压v(t)。当v(t)上的电压被调整为一个合适的电压值时,xi(t)的频率和相位与x(t)的一致,系统最终处于平衡状态,从而实现对输入信号的跟踪。
2 电荷泵锁相环的噪声模型与相位噪声特性分析 电荷泵锁相环的环路等效噪声模型可以用锁相环各子模块附加噪声源表示。图2给出了带有无源滤波器锁相环噪声源模的型。设fm为距离调制频率的偏移量,该图中主分频器、参考时钟分频器的均方噪声功率谱密度分别被表示为ψd(fm)和ψrcf(fm);鉴相鉴频器的相位噪声被表示为ψpd(fm);晶体振荡器的相位噪声被表示为ψx(fm);相位噪声源的单位是电荷泵的噪声被等价为电流源inp(fm)(单位: ); 滤波器的噪声被等价为电压源Vnf(fm)(单位: 的自由振荡噪声被表示为 环路输出信号的均方噪声功率谱密度被表示为它是闭环情况下所有噪声源影响的总和。输出相位噪声功率谱密度可以表示为: 式中:ψo lp2(fm)为具有低通传输函数的噪声源功率谱密度;ψohp2(fm)为具有高通传输函数的噪声源功率谱密度。 在图2所示的噪声源等效模型中,ψd(fm),ψref(fm),ψpd(fm),ψx(fm)和inp(fm)具有低通传输特性,其传输函数可以表示为: 式中:G(s)和H(s)分别为环路的开环增益函数和闭环增益函数。归一化的电荷泵相位噪声inp(fm)/Kpd和晶体振荡器噪声ψx(fm)/R对ψo lp(fm)的影响也可以用式(2)来表示。当用j2πfm代替s时,ψo2(fm)中具有低通传输函数噪声源功率谱密度的噪声分量ψo lp2 (fm)可以表示为:
超低相位噪声基于频梳的微波产生和性能 摘要——我们通过光电检测锁定于1.5um超窄线宽超稳定激光的基于铒掺杂光纤频梳相位的脉冲串来报告12GHz超低相位噪声微波信号的产生。拥有先进的光电检测技术和自制相位噪声计量器具,我们的实验证明了微波源的产生,具有10KHz以上且低于170dBc/Hz,源自一个12 GHz 载体的1Hz且低于100dBc/Hz的全相噪声,这将极大推进目前最好的记录结果。 关键字——光纤频梳,光电微波源,超低相位噪声 前言 诸如无线通讯,雷达,深空航行系统,精密微波光谱学的许多应用都需要超稳定微波信号。这种光纤信号通过光纤频梳产生是特别有趣的,因为它允许把无法超越的超稳定连续波激光的光谱纯度转变成微波领域(同光纤和太赫兹辐射波领域),潜在的引导记录低相位噪声微波源。 光纤到微波的转变由拥有超稳定光纤参考频率的飞秒激光器的重复率同步完成。通过光纤脉冲串的快速光电探测对微波信号进行更深入的提取。然而,光电产生微波信号的光谱纯度同时受到频梳重复率性能以及光电探测过程自身的限制。光电探测进程收到了影响,特别是振幅
相位转变(APC)的影响,它转变了微波信号相位噪声中飞秒激光的强烈噪声,同时,它还受到光电探测器的约翰逊·奈奎斯特定理和冲击的影响。 我们通过增加产生在重复率相关谐波的微波功率来克服后来基本原理的限制,并运用基于光纤的梳状滤波器,该滤波器增加脉冲串的有效重复率,并与高线性高处理功率的光电探测器结合。我们也发展了一套自动测量伺服装置来降低APC的水平,这种状态下就不会对我们生产的微波信号的相位噪声产生重大的影响。 对其自身而言,超低相位噪声微波的特性达到这种水平状态是一项有趣的挑战。我们已经发明了一套基于3光纤频梳的特殊装置(给基础参考频率额外加上一个作为参考),3超稳定激光,一个高质量微波电路以及一个基于现场可编程门阵列自制的外差法振荡器,在源自具有极低的振幅噪声敏感度的12Ghz载体的傅里叶频率大于1KHz的条件下,该振荡器与达到低于-180dBc/Hzd的测量噪声水平互相关。 II 实验装置 我们的实验装置由一些光纤频梳和超稳定连续波激光器。这些超稳定连续波激光器由波长为1.5um的半导体二极管激光器组成,激光器被超高精细度(典型~6 10)的超高真空法布里-珀罗空腔的调制技术伺服。
1.前言 1.1 序言 随着人类社会步入信息化社会,电子信息科学技术正以惊人的速度发展,开辟了社会发展的新纪元。从20世纪90年代开始至今,通信技术特别是移动通信技术取得了举世瞩目的成就。在通信技术日新月异的今天,学习通信专业知识不仅需要扎实的基础理论,同时需要学习和掌握更多的现代通信技术和网络技术。通信技术正向着数字化、网络化、智能化和宽带化的方向发展。全面、系统地论述了通信系统基本理沦、基本技术以及系统分析与设计中用到的基本工具和方法,并将重点放在数字通信系统上。通信系统又可分为数字通信与模拟通信。传统的模拟通信系统,包括模拟信号的调制与解调,以及加性噪声对幅度调制和角度调制模拟信号解调的影响。数字通信的基本原理,包括模数转换、基本AWGN信道中的数字调制方法、数字通信系统的信号同步方法、带限AWGN信道中的数字通信问题、数字信号的载波传输、数字信源编码以及信道编码与译码等,同时对多径信道中的数字通信、多载波调制、扩频、GSM与IS95数位蜂窝通信。随着数字技术的发展原来许多不得不采用的模拟技术部分已经可以由数字化来实现,但是模拟通信还是比较重要的 1.2 设计任务 本设计是基于MATLAB的模拟相位(PM)调制与解调仿真,主要设计思想是利用MATLAB这个强大的数学软件工具,其中的通信仿真模块通信工具箱以及M檔等,方便快捷灵活的功能实现仿真通信的调制解调设计。还借助MATLAB可视化交互式的操作,对调制解调处理,降低噪声干扰,提高仿真的准确度和可靠性。要求基于MATLAB的模拟调制与解调仿真,主要设计思想是利用MATLAB、simulink檔、M檔等,方便快捷的实现模拟通信的多种调制解调设计。基于simulink对数字通信系统的调制和解调建模。并编写相应的m檔,得出调试及仿真结果并进行分析。
项目课题: 基于PLC小车自动往返控制 2015年8月 项目一:基于PLC小车自动往返控制 利用PLC完成小车自动往返控制线路的安装与调试 1、按下正转启动按钮→正转接触器线圈得电吸合→电动机正向连续运转→小车右行;小车右行碰到SQ1→小车右行停止,延时1s后小车左行。
2、按下反转启动按钮→反转接触器线圈得电吸合→电动机反向连续运转→小车左行;小车左行碰到SQ2→小车左行停止,延时1s后小车右行。 3、按下停止按钮后,电动机停止运转。 4、SQ3、SQ4为小车运行的左右行极限位开关。 5、控制线路具有短路保护、过载保护等完善的保护措施。 6、各小组发挥团队合作精神,共同设计出PLC的I/O分配表,电气原理图、正确选择安装所需要的电器元件、规范完成线路的安装与配线、正确编制出PLC程序,并下载到PLC内,完成任务运行调试(空载与带载实验)。 一、电动机继电器控制线路 二、PLC基本知识 一、根据控制要求,首先确定I/O的个数,进行I/O的分配。本案例需要8个输入点,2个输出点,如表2-1所示。 二、根据控制要求分析,设计并绘制PLC系统接线原理图,如下图2-1所示。 1.设计电路原理图时,应具备完善的保护功能,PLC外部硬件也具备互锁电路。 2.PLC继电器输出所驱动的负载额定电压一般不超过220V,或设置外部中间继电器。 3.绘制原理图要完整规范。
图2-1 plc系统接线原理图 三、安装与接线 1.材料准备:根据接线原理图,列出需要的所有材料清单,如表2-2所示。 (2)检测元器件的质量好坏。 (3)PLC的选型要合理,在满足要求下尽量减少I/O的点数,以降低硬件的成本。 表2-2 材料清单
电子数字频率计测量方法毕业论文 1绪论 1.1研究背景及主要研究意义 频率是电子技术领域永恒的话题,电子技术领域离不开频率,一旦离开频率,电子技术的发展是不可想象的,为了得到性能更好的电子系统,科研人员在不断的研究频率,CPU就是用频率的高低来评价性能的好坏,可见,频率在电子系统中的重要性。 频率计又称为频率计数器,是一种专门对被测信号频率进行测量的电子测量仪器,其最基本的工作原理为:当被测信号在特定的时间段T的周期个数N时,则被测信号的频率f=N/T.电子计数器是一种基础测量仪器,到目前为止已有三十多年的发展历史。早期,设计师们追求的目标主要是扩展测量围,再加上提高测量精度、稳定度等,这些也是人们衡量电子计算机的技术水平,决定电子技术器价格高低的主要依据。目前这些技术日臻完善,成熟。应用现代技术可以轻松地将电子计数器的频率扩展到微波频段。 1.2数字频率计的发展现状 随着科学技术的发展,用户对电子计数器也提出了新的要求。对于低档产品要求使用操作方便,量程(足够)宽,可靠性高,价格低。而对中高档产品,则要求有较高的分辨率,高精度,高稳定度,高测量速率;除通常通用计数器所具有的功能外,还要有数据处理功能,统计分析功能等等,或者包含电压测量等其他功能。这些要求有的已经实现或者部分实现,但要真正地实现这些目标,对于生产厂家来说,还有许多工作要做,而不是表面看来似乎发展到头了。 由于微电子技术和计算机技术的发展,频率计都在不断地进步着,灵敏度不断提高,频率围不断扩大,功能不断增加。在测试通讯、微波器件或产品时,通常都市较复杂的信号,如含有复杂频率成分、调制的含有未知频率分量的、频率固定的变化的、纯净的或叠加有干扰的等等。为了能正确的测量不同类型的信号,必须了解待测信号特性和各种频率测量仪器的性能。微波技术器一般使用类型频谱分析仪的分频或混频电路,另外还包含多个时间基准、合成器、中频放大器等。虽然所有的微波计数器都是用来完成技术任务的,但各自厂家都有各自的一套复
The Research of Noise in The PLL LU Shiqiang , YANG Guoyu ( School of the Microwave engineering ,UESTC ChengDu 610054 China ) Absract This articles introducs the basic concepts and the phase noise in phase-locked loops (PLLs). It focus on a detailed examination of two critical specifications associated with PLLs : phase noise and reference spurs. What causes them and how can they be minimized? Also it inculdes an example . Key words :PLL ; Phase Noise ; Oscillator 1 . The Basic Theory of the PLL A phase-locked loop is a feedback system combining a voltage controlled oscillator and a phase comparator so connected that the oscillator maintains a constant phase angle relative to a reference signal. Phase-locked loops can be used, for example, to generate stable output frequency signals from a fixed low-frequency signal . The phase locked loop can be analyzed in general as a negative feedback system with a forward gain term and a feedback term. .A simple block diagram of a voltage-based negative-feedback system is shown in Figure 1. Figure 1. Standard negative-feedback control system model In a phase-locked loop, the error signal from the phase comparator is proportional to the relative phase of the input and feedback signals. The average output of the phase detector will be constant when the input and feedback signals are the same frequency. The usual equations for a negative-feedback system apply. Forward Gain = G(s), [s = jw = j2pif] Loop Gain = G(s) H(s) Closed Loop Gain = G(s)/[1+G(s)H(s)] Because of the integration in the loop, at low frequencies the steady state gain, G(s) is very high and VO/VI, Closed-Loop Gain =1/ H and Fo=NF REF. . The components of a PLL that contribute to the loop gain include : 1. The phase detector (PD) and charge pump (CP). 2. The loop filter, with a transfer function of Z(s) 3. The voltage-controlled oscillator (VCO), with a sensitivity of KV /s 4. The feedback divider, 1/N
锁相环的组成和工作原理 时间:2011-11-23 来源:作者: 关键字:锁相环工作原理 1.锁相环的基本组成 许多电子设备要正常工作,通常需要外部的输入信号与内部的振荡信号同步,利用锁相环路就可以实现这个目的。 锁相环路是一种反馈控制电路,简称锁相环(PLL)。锁相环的特点是:利用外部输入的参考信号控制环路内部振荡信号的频率和相位。 因锁相环可以实现输出信号频率对输入信号频率的自动跟踪,所以锁相环通常用于闭环跟踪电路。锁相环在工作的过程中,当输出信号的频率与输入信号的频率相等时,输出电压与输入电压保持固定的相位差值,即输出电压与输入电压的相位被锁住,这就是锁相环名称的由来。 锁相环通常由鉴相器(PD)、环路滤波器(LF)和压控振荡器(VCO)三部分组成,锁相环组成的原理框图如图8-4-1所示。锁相环中的鉴相器又称为相位比较器,它的作用是检测输入信号和输出信号的相位差,并将检测出的相位差信号转换成uD(t)电压信号输出,该信号经低通滤波器滤波后形成压控振荡器的控制电压uC(t),对振荡器输出信号的频率实施控制。 2.锁相环的工作原理 锁相环中的鉴相器通常由模拟乘法器组成,利用模拟乘法器组成的鉴相器电路如图8-4-2所示。 鉴相器的工作原理是:设外界输入的信号电压和压控振荡器输出的信号电压分别为: 式中的ω0为压控振荡器在输入控制电压为零或为直流电压时的振荡角频率,称为电路的固有振荡角频率。则模拟乘法器的输出电压uD为: 用低通滤波器LF将上式中的和频分量滤掉,剩下的差频分量作为压控振荡器的输入控制电压uC(t)。即uC(t)为:
式中的ωi为输入信号的瞬时振荡角频率,θi(t)和θO(t)分别为输入信号和输出信号的瞬时位相,根据相量的关系可得瞬时频率和瞬时位相的关系为: 上式等于零,说明锁相环进入相位锁定的状态,此时输出和输入信号的频率和相位保持恒定不变的状态,uc(t)为恒定值。当上式不等于零时,说明锁相环的相位还未锁定,输入信号和输出信号的频率不等,uc(t)随时间而变。 因压控振荡器的压控特性如图8-4-3所示,该特性说明压控振荡器的振荡频率ωu以ω0为中心,随输入信号电压uc(t)的变化而变化。该特性的表达式 上式说明当uc(t)随时间而变时,压控振荡器的振荡频率ωu也随时间而变,锁相环进入“频率牵引”,自动跟踪捕捉输入信号的频率,使锁相环进入锁定的状态,并保持ω0=ωi的状态不变。 8.4.2锁相环的应用 1.锁相环在调制和解调中的应用 (1)调制和解调的概念 为了实现信息的远距离传输,在发信端通常采用调制的方法对信号进行调制,收信端接收到信号后必须进行解调才能恢复原信号。 所谓的调制就是用携带信息的输入信号ui来控制载波信号uC的参数,使载波信号的某一个参数随输入信号的变化而变化。载波信号的参数有幅度、频率和位相,所以,调制有调幅(AM)、调频(FM)和调相(PM)三种。 调幅波的特点是频率与载波信号的频率相等,幅度随输入信号幅度的变化而变化;调频波的特点是幅度与载波信号的幅度相等,频率随输入信号幅度的变化而变化;调相波的特点是幅度与载波信号的幅度相等,相位随输入信号幅度的变化而变化。调幅波和调频波的示意图如图8-4-4所示。
教案 2015 ?2016 学年度上学期 课程名称:_________ 《电力拖动控制线路》 授课教师:_______________ xxx ____________________ 课程所属系(部):机电工程系
《位置控制与自动往返控制线路》课程教案
教学容与教学过程 如图1所示行车运行示意图,如何用电动机拖动行 车向前和向后运行? 提出问题:如果操作者失误,在行车运行到两端的极限位置 时未能及时按下停止按钮,会出现什么结果?如何避免出现 这一现象? 阶段与时间 安排 」、组织教 学 : (3 min ) 教学容教师活动学生活动整顿课堂纪律,分小组坐好,准备进入教学 整顿课 堂纪律, 检查考 勤,准备 进入教 学。 二、复习旧 知,引入新 知 (5min ) 利用接触器联锁正反转控制线路来拖动行车的向前和向 后运动,电路图如下图2所示: 1112 口 匚駄 V 7 1 W-L1 出挂图 提问问 题 出挂图复 习旧知 提出问题 学生观 察行车 的运动 状态思 考并尝 试回答 问题 温故而 知新, 为新课 的讲授 做好铺 垫。
【讲授新课】 位置开关: 定义:将机械信号转换为电气信号以控制运动部件 位置或行程的控制电器。 位置控制就是利用生产机械运动部件上的挡铁与行 程位置开 关碰撞,使其触头动作来接通或断开电路, 以实现对生产机械运动部件的位置或行程的一种方 在行车的两端终点处各安装一个行程开关 SQ1和 SQ2行车前后各装有挡铁1和挡铁2指出利用行程 开关,可以使行车在到达两端极限位置时自动停下 来。 4向南|行丰|向 后? 档铁/ W2 想一想:请同学们在接触器联锁正反转控制线路基 三、讲授新 知 识 (30mi n ) 法称为位置控制,又称为行程控制或限位控制 图位置开关
ADI官网下载了个资料,对于PLL学习和设计来说都非常实用的好资料,转发过来,希望对大家有帮助(原文链接 https://www.doczj.com/doc/a05516152.html,/zh/content/cast_faq_PLL/fca.html#faq_pll_01) ?参考晶振有哪些要求?我该如何选择参考源? ?请详细解释一下控制时序,电平及要求? ?控制多片PLL芯片时,串行控制线是否可以复用? ?请简要介绍一下环路滤波器参数的设置? ?环路滤波器采用有源滤波器还是无源滤波器? ?PLL对于VCO有什么要求?以及如何设计VCO输出功率分配器? ?如何设置电荷泵的极性? ?锁定指示电路如何设计? ?PLL对射频输入信号有什么要求? ?PLL芯片对电源的要求有哪些? ?内部集成了VCO的ADF4360-x,其VCO中心频率如何设定? ?锁相环输出的谐波? ?锁相环系统的相位噪声来源有哪些?减小相位噪声的措施有哪些? ?为何我测出的相位噪声性能低于ADISimPLL仿真预期值? ?锁相环锁定时间取决于哪些因素?如何加速锁定? ?为何我的锁相环在做高低温试验的时候,出现频率失锁? ?非跳频(单频)应用中,最高的鉴相频率有什么限制? ?频繁地开关锁相环芯片的电源会对锁相环有何影响? ?您能控制PLL芯片了么?,R分频和N分频配置好了么?
?您的晶振输出功率有多大?VCO的输出功率有多大? ?您的PFD鉴相极性是正还是负? ?您的VCO输出频率是在哪一点?最低频率?最高频率?还是中间的某一点?VCO 的控制电压有多大? ?您的PLL环路带宽和相位裕度有多大? ?评价PLL频率合成器噪声性能的依据是什么? ?小数分频的锁相环杂散的分布规律是什么? ?到底用小数分频好还是整数分频好? ?ADI提供的锁相环仿真工具ADISimPLL支持哪些芯片,有什么优点? ?分频–获得高精度时钟参考源? ?PLL,VCO闭环调制,短程无线发射芯片? ?PLL,VCO开环调制? ?时钟净化----时钟抖动(jitter)更小? ?时钟恢复(Clock Recovery)? 问题:参考晶振有哪些要求?我该如何选择参考源? 答案:波形:可以使正弦波,也可以为方波。 功率:满足参考输入灵敏度的要求。
《电动机自动往返控制电路原理与安装、调试、检修》 教学设计 一、教学内容分析 “电动机自动往返控制电路原理与安装、调试、检修”是机电技术应用专业的主要专业课程。本课程包含四个学习任务,分别为:⑴介绍自动往返控制电路工作原理、⑵自动往返控制电路的安装、⑶自动往返控制电路调试、⑷自动往返控制电路检修 本学习任务的主要内容是:记住自动往返控制电路工作原理;会安装和调试自动往返控制电路;能用电路工作原理来分析电路故障现象;编写故障检修流程;实际检测并排除电路故障。 二、教学对象分析 本课程的教学对象是初中起点机电技术应用专业2年级的学生,学生已经学习了起、保、停电路的安装;正反转控制电路的安装。在教师指导下,能对简单控制电路进行检测与维修。 该班学生上课不太认真,逻辑思维能力、总结能力、应急能力和
合作能力相对较差。 三、教学目标设计 1、能说出自动往返控制线路的工作原理。 2、会正确安装自动往返控制线路。 3、根据故障现象,能运用专业化语言描述故障现象产生的原因。 4、会制定故障诊断与排除故障的流程。 5、会检测与维修自动往返控制线路。 6、通过该任务的学习,提高学生分析电路的能力、实际动手能力、团结协作能力。 四、学习重点及其化解方法 1、重点 自动往返控制线路的工作原理和电路中各电器元件的作用,会安装并调试电路。 2、化解方法 老师详讲,提出问题,学生分组讨论;老师示范操作、学生实际安装电路。 五、学习难点及其化解方法 1.难点 安装电路,故障分析与检修步骤的制定,实际检修电路。 2.化解方法 老师现场分析并示范检修故障,学生小组合作、查阅资料、实际检修电路,教师巡回指导。 六、教学策略选择与设计
摘要: 相位噪声指标对于当前的射频微波系统、移动通信系统、雷达系统等电子系统影响非常明显,将直接影响系统指标的优劣。该项指标对于系统的研发、设计均具有指导意义。相位噪声指标的测试手段很多,如何能够精准的测量该指标是射频微波领域的一项重要任务。随着当前接收机相位噪声指标越来越高,相应的测试技术和测试手段也有了很大的进步。同时,与相位噪声测试相关的其他测试需求也越来越多,如何准确的进行这些指标的测试也愈发重要。 1、引言 随着电子技术的发展,器件的噪声系数越来越低,放大器的动态范围也越来越大,增益也大有提高,使得电路系统的灵敏度和选择性以及线性度等主要技术指标都得到较好的解决。同时,随着技术的不断提高,对电路系统又提出了更高的要求,这就要求电路系统必须具有较低的相位噪声,在现代技术中,相位噪声已成为限制电路系统的主要因素。低相位噪声对于提高电路系统性能起到重要作用。 相位噪声好坏对通讯系统有很大影响,尤其现代通讯系统中状态很多,频道又很密集,并且不断的变换,所以对相位噪声的要求也愈来愈高。如果本振信号的相位噪声较差,会增加通信中的误码率,影响载频跟踪精度。相位噪声不好,不仅增加误码率、影响载频跟踪精度,还影响通信接收机信道内、外性能测量,相位噪声对邻近频道选择性有影响。如果要求接收机选择性越高,则相位噪声就必须更好,要求接收机灵敏度越高,相位噪声也必须更好。 总之,对于现代通信的各种接收机,相位噪声指标尤为重要,对于该指标的精准测试要求也越来越高,相应的技术手段要求也越来越高。 2、相位噪声基础 2.1、什么是相位噪声 相位噪声是振荡器在短时间内频率稳定度的度量参数。它来源于振荡器输出信号由噪声引起的相位、频率的变化。频率稳定度分为两个方面:长期稳定度和短期稳定度,其中,短期稳定度在时域内用艾伦方差来表示,在频域内用相位噪声来表示。 2.2、相位噪声的定义 以载波的幅度为参考,在偏移一定的频率下的单边带相对噪声功率。这个数值是指在1Hz的带宽下的相对噪声电平,其单位为dBc/Hz。该定义最早是基于频谱仪法测试相位噪声,不区分调幅噪声和调相噪声。 单边带相位噪声L(f)定义为随机相位波动单边带功率谱密度Sφ(f)的一半,其单位为dBc/Hz。其中Sφ(f)为随机相位波动φ(t)的单边带功率谱密度,其物理量纲是rad2/Hz。
相位噪声基础及测试原理和方法 相位噪声指标对于当前的射频微波系统、移动通信系统、雷达系统等电子系统影响非常明显,将直接影响系统指标的优劣。该项指标对于系统的研发、设计均具有指导意义。相位噪声指标的测试手段很多,如何能够精准的测量该指标是射频微波领域的一项重要任务。随着当前接收机相位噪声指标越来越高,相应的测试技术和测试手段也有了很大的进步。同时,与相位噪声测试相关的其他测试需求也越来越多,如何准确的进行这些指标的测试也愈发重要。 1、引言 随着电子技术的发展,器件的噪声系数越来越低,放大器的动态范围也越来越大,增益也大有提高,使得电路系统的灵敏度和选择性以及线性度等主要技术指标都得到较好的解决。同时,随着技术的不断提高,对电路系统又提出了更高的要求,这就要求电路系统必须具有较低的相位噪声,在现代技术中,相位噪声已成为限制电路系统的主要因素。低相位噪声对于提高电路系统性能起到重要作用。 相位噪声好坏对通讯系统有很大影响,尤其现代通讯系统中状态很多,频道又很密集,并且不断的变换,所以对相位噪声的要求也愈来愈高。如果本振信号的相位噪声较差,会增加通信中的误码率,影响载频跟踪精度。相位噪声不好,不仅增加误码率、影响载频跟踪精度,还影响通信接收机信道内、外性能测量,相位噪声对邻近频道选择性有影响。如果要求接收机选择性越高,则相位噪声就必须更好,要求接收机灵敏度越高,相位噪声也必须更好。 总之,对于现代通信的各种接收机,相位噪声指标尤为重要,对于该指标的精准测试要求也越来越高,相应的技术手段要求也越来越高。 2、相位噪声基础 2.1、什么是相位噪声 相位噪声是振荡器在短时间内频率稳定度的度量参数。它来源于振荡器输出信号由噪声引起的相位、频率的变化。频率稳定度分为两个方面:长期稳定度和短期稳定度,其中,短期稳定度在时域内用艾伦方差来表示,在频域内用相位噪声来表示。 2.2、相位噪声的定义
相位噪声和抖动的概念及其估算方法 时钟频率的不断提高使相位噪声和抖动在系统时序上占据日益重要的位置。本文介其概念及其对系统性能的影响,并在电路板级、芯片级和单元模块级分 别提供了减小相位噪声和抖动的有效方法。 随着通信系统中的时钟速度迈入GHz级,相位噪声和抖动这两个在模拟设 计中十分关键的因素,也开始在数字芯片和电路板的性能中占据日益重要的位置。在高速系统中,时钟或振荡器波形的时序误差会限制一个数字I/O接口的最大速率,不仅如此,它还会增大通信链路的误码率,甚至限制A/D转换器的动态范围。 在此趋势下,高速数字设备的设计师们也开始更多地关注时序因素。本文向数字设计师们介绍了相位噪声和抖动的基本概念,分析了它们对系统性能的影响,并给出了能够将相位抖动和噪声降至 最低的常用电路技术。 什么是相位噪声和抖动? 相位噪声和抖动是对同一种现象的 两种不同的定量方式。在理想情况 下,一个频率固定的完美的脉冲信 号(以1 MHz为例)的持续时间应该恰好是1微秒,每500ns有一个跳变沿。 但不幸的是,这种信号并不存在。如图1所示,信号周期的长度总会有一定变化,从而导致下一个沿的到来时间不确定。这种不确定就是相位噪声,或者说抖动。 抖动是一个时域概念 抖动是对信号时域变化的测量结果,它从本质上描述了信号周期距离其理想值偏离了多少。通常,10 MHz以下信号的周期变动并不归入抖动一类,而是归入偏移或者漂移。抖动有两种主要类型:确定性抖动和随机性抖动。确定性抖动是由可识别的干扰信号造成的,这种抖动通常幅度有限,具备特定的(而非随机的)产生原因,而且不能进行统计分析。造成确定性抖动的来源主要有4种: 1. 相邻信号走线之间的串扰:当一根导线的自感增大后,会将其相邻信 号线周围的感应磁场转化为感应电流,而感应电流会使电压增大或减小, 从而造成抖动。 2. 敏感信号通路上的EMI辐射:电源、AC电源线和RF信号源都属于EMI源。与串扰类似,当附近存在EMI辐射时,时序信号通路上感应到的噪声电流会调制时序信号的电压值。 3. 多层基底中电源层的噪声:这种噪声可能改变逻辑门的阈值电压,或者改变阈值电压的参考地电平,从而改变开关门电路所需的电压值。