2020 基尔霍夫定律实验报告文档Contract Template
基尔霍夫定律实验报告文档 前言语料:温馨提醒,报告一般是指适用于下级向上级机关汇报工作,反映情况, 答复上级机关的询问。按性质的不同,报告可划分为:综合报告和专题报告;按行 文的直接目的不同,可将报告划分为:呈报性报告和呈转性报告。体会指的是接触 一件事、一篇文章、或者其他什么东西之后,对你接触的事物产生的一些内心的想 法和自己的理解 本文内容如下:【下载该文档后使用Word打开】 基尔霍夫定律实验报告1 一、实验目的 (1)加深对基尔霍夫定律的理解。 (2)学习验证定律的方法和仪器仪表的正确使用。 二、实验原理及说明 基尔霍夫定律是集总电路的基本定律,包括电流定律(KCL)和电压定律(KVL)。 基尔霍夫定律规定了电路中各支路电流之间和各支路电压之间必须服从的约束关系,无论电路元件是线性的或是非线性的,时变的或是非时变的,只要电路是集总参数电路,都必须服从这个约束关系。 (1)基尔霍夫电流定律(KCL)。在集总电路中,任何时刻,对任一节点,所有支路电流的代数和恒等于零,即∑i=0。通常约定:流出节点的支路电流取正号,流入节点的支路电流取负号。
(2)基尔霍夫电压定律(KVL)。在集总电路中,任何时刻,沿任一回路所有支路电压的代数和恒等于零,即沿任—回路有∑u=0。在写此式时,首先需要任意指定一个回路绕行的方向。凡电压的参考方向与回路绕行方向一致者,取“+”号;电压参考方向与回路绕行方向相反者,取“一”号。 (3)KCL和KVL定律适用于任何集总参数电路,而与电路中的元件的性质和参数大小无关,不管这些元件是线性的、非线性的、含源的、无源的、时变的、非时变的等,定律均适用。 三、实验仪器仪表 四、实验内容及方法步骤 (1)验证(KCL)定律,即∑i=0。分别在自行设计的电路或参考的电路中,任选一个节点,测量流入流出该节点的各支路电流数值和方向,记入附本表1-1~表1-5中并进行验证。参考电路见图1-1、图1-2、图1-3所示。 (2)验证(KVL)定律,即∑u=0。分别在自行设计的电路或参考的电路中任选一网孔(回路),测量网孔内所有支路的元件电压值和电压方向,对应记入表格并进行验证。参考电路见图1-3。五、测试记录表格 表1-1线性对称电路 表1-2线性对称电路 表1-3线性不对称电路 表1-4线性不对称电路 表1-5线性不对称电路
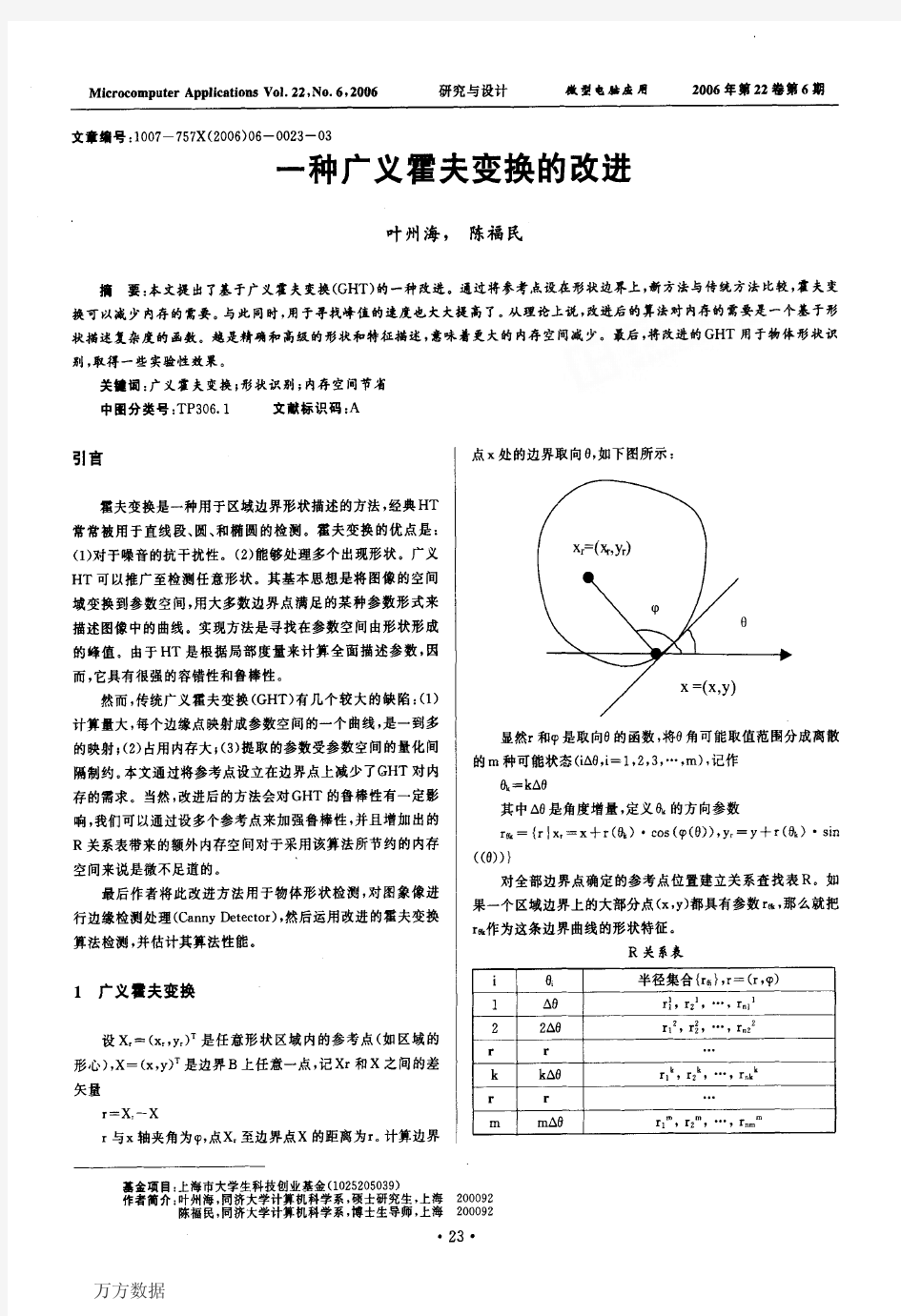
计算机视觉中经常需要识别或者定位某些几何图形,比如直线、圆、椭圆,还有其他一些图形。检测直线的霍夫变换提供了在图像中寻找直线的一种算法,是最简单的一种情形,后来发展到检测圆、椭圆、还有一般图形的霍夫变换,其核心思想是把图像中属于某种图形的点集(二维)映射到一个点(可以是高维)上,这个点记录了点集中点的数目,使得程序通过搜索峰值找到该点,这个点就是后面要说到的图形的参数,而该参数的范围就叫做参数空间。霍夫变换不仅能够识别出图像中有无需要检测的图形,而且能够定位到该图像(包括位置、角度等),这就非常有用了。接下来将通过分析从简单到复杂的霍夫变换,导出霍夫变换的实质。 直线:检测直线的霍夫变换使用含极坐标参数的直线表示型式简称极坐标式(不是极坐标方程, 因为还是在笛卡尔坐标下表示)—— 其中的两个参数的意义如下图: 为什么要用极坐标式而不直接用一般形式:ax+by=c(归一化可以去掉参数c),或者其他的如斜截式、截距式呢?首先它们都会遇到奇异情况,比如c=0,斜率=无穷大,其中一个截距=0;再一个是某些形式的参数空间不是闭的,比如斜截式的斜率k,取值范围从0到无穷大,给量化搜索带来了困难。而极坐标式就妙在距离和角度两个参数都是有界的,而且正余弦函数也有界不会发生奇异情况。 直线霍夫变换有两个参数,且这两个参数通过极坐标式相关联,所以程序在投票阶段(图形点集转换到一个点)只需要遍历其中一个,搜索峰值在二维参数空间进行。
圆:霍夫变换检测圆使用圆的标准式就可以了 —— 我们发现圆的方程又比直线多了一个参数,这三个参数通过上面的方程相关联,因此在投票阶段需要遍历其中两个,搜索峰值在三维参数空间进行。如果图像比较大,那么这样的遍历搜索是相当耗时的,所以为了满足实时性后来又发展出其他检测圆的霍夫变换,比如概率霍夫变换,结合梯度信息的霍夫变换。 霍夫变换检测椭圆如果使用椭圆的标准式,那么将会有五个参数,它们通过标准式相关,检测圆就已经相当耗时了,如果再用这中方程形式处理势必失去实际用途。 Ballard (1981) 一般化了霍夫变换(Hough,1962),利用图形梯度量加快算法速度,形成了一般霍夫变换。 透过前面的检测直线、圆、一般霍夫变换,已经可以提取出霍夫变换的一个本质——给出图形的一个描述模式,比如图形点集的方程、函数、表格等,然后利用这个模式加上遍历参数空间,把属于该模式的图形点集投射到参数空间的一个点(实际的离散情况一般不会完美的集中到一点),这个点记录的是图形点数目。 一般霍夫变换之所以能处理任意形状的图形并不是找到了可以表示任意图形的方程(这是不可能的),而是使用表的形式描述一种图形,把图形边缘点坐标保存在一张表中,那么该图形就确定下来了,所以其实无论是直线(其实是线段)、圆、椭圆还是其他形状的几何图形,都可以使用同一方法处理,所不同的是这时候的图形是自定义的,是实在的,而代数方程表示的模式是连续的、抽象的,圆的方程只有一种,但自定义的圆却是无穷的,只要你认为它足够圆了就可以。当然两种表示都会有各自的优势和局限。有了表之后就需要找到一种可以把图形点集投射到参数空间的一点的转换算法,例如直线和圆霍夫变换通过方程(函数)及遍历把点集进行投射,使得属于某直线或圆的点集中到一个点;那么仅有一张描述图形边缘坐标点的表如何进行投射呢?我们可以把这张表看作是模板,进行模板匹配,大部分的点匹配成功也就可以理解为这些点都投射到一个点上,不过这时候不需要再搜索参数空间峰值了,这种模式可以认为是参数间没有任何关联,所以是完全的遍历。但有旋转加上缩放的情况模板匹配型的霍夫变换是十分耗时的,也可以想象成因为参数不相关所以增加遍历搜索时间。Ballard (1981) 的一般霍夫变换最精妙之处在于为参数增加了两个关联,使得有平移和旋转(无缩放)的情况只需要遍历一个参数,三个参数分别是图形的中心坐标(横纵),旋转角度(相对参考图形),Ballard 的算法预先把参考图形边缘点对中心的径向量保存起来,利用待搜索图形边缘点的梯度方向(用相对坐标轴的角度表示)作为索引找到相应的径向量,加上该量后就完成了投射,所以要遍历的参数只有旋转角度,所以说有两个关联。当然如果加上缩放就要遍历两个参数,这也只是和霍夫检测圆的规模一样而已。这种一般霍夫变换的图形表不再是直接保存坐标,而是边缘点的梯度加上径向量,还有一个中心坐标,给出了这些量同样的也就能够表示出一种图形了。然而这种一般霍夫变换也是有缺陷的,不少后来者提出了改进方法,这不在本文讨论范围。 再来强调一次,霍夫变换就是通过图形的一种表示模式,加上一种转换方法,把图形的点集投射到一个点上以便检测。我们已经能够知道,参数个数越少,需要遍历的参数个数约少(关联越多),参数空间越小则处理速度越快。所以设计一种合理的转换方法非常关键。
一.实验目的 1.验证基尔霍夫定律,加深对基尔霍夫定律的理解; 2.掌握直流电流表的使用以及学会用电流插头、插座测量各支路电流的方法;3.学习检查、分析电路简单故障的能力。 二.原理说明 1.基尔霍夫定律 基尔霍夫电流定律和电压定律是电路的基本定律,它们分别用来描述结点电流和回路电压,即对电路中的任一结点而言,在设定电流的参考方向下,应有ΣI =0,一般流出结点的电流取正号,流入结点的电流取负号;对任何一个闭合回路而言,在设定电压的参考方向下,绕行一周,应有ΣU =0,一般电压方向与绕行方向一致的电压取正号,电压方向与绕行方向相反的电压取负号。 在实验前,必须设定电路中所有电流、电压的参考方向,其中电阻上的电压方向应与电流方向一致,见图8-1所示。 2.检查、分析电路的简单故障 电路常见的简单故障一般出现在连线或元件部分。连线部分的故障通常有连线接错,接触不良而造成的断路等;元件部分的故障通常有接错元件、元件值错,电源输出数值(电压或电流)错等。 故障检查的方法是用用万用表(电压档或电阻档)或电压表在通电或断电状态下检查电路故障。 (1)通电检查法:在接通电源的情况下,用万用表的电压档或电压表,根据电路工作原理,如果电路某两点应该有电压,电压表测不出电压,或某两点不应该有电压,而电压表测出了电压,或所测电压值与电路原理不符,则故障必然出现在此两点间。 (2)断电检查法:在断开电源的情况下,用万用表的电阻档,根据电路工作原理,如果电路某两点应该导通而无电阻(或电阻极小),万用表测出开路(或电阻极大),或某两点应该开路(或电阻很大),而测得的结果为短路(或电阻极小),则故障必然出现在此两点间。 本实验用电压表按通电检查法检查、分析电路的简单故障。 三.实验设备 1.直流数字电压表、直流数字毫安表(根据型号的不同,EEL—Ⅰ型为单独的MEL -06组件,其余型号含在主控制屏上) 2.恒压源(EEL—Ⅰ、Ⅱ、Ⅲ、Ⅳ、Ⅴ均含在主控制屏上,根据用户的要求,可能有两种配置(1)+6 V(+5V),+12V,0~30V可调或(2)双路0~30V可调。) 3.EEL-30组件(含实验电路)或EEL-53组件
‘IEEE Transactions on Pattern Recognition And Machine Intelligence’ ‘IEEE Transactions on Image Processing’ 是最重要的两本,其它的如ICCV、CVPR、ECCV、NIPS、BMVC等的会议文章也非常好。 最小二乘线性拟合算法、随机霍夫变换、局部霍夫变换、 canny算子边缘检测、图像增强 霍夫变换 霍夫变换(Hough Transform)是图像处理中从图像中识别几何形状的基本方法之一,应用很广泛,也有很多改进算法。主要用来从图像中分离出具有某种相同特征的几何形状(如,直线,圆等)。最基本的霍夫变换是从黑白图像中检测直线(线段)。 详细内容 我们先看这样一个问题:设已知一黑白图像上画了一条直线,要求出这条直线所在的位置。我们知道,直线的方程可以用y=k*x+b 来表示,其中k和b是参数,分别是斜率和截距。过某一点(x0,y0)的所有直线的参数都会满足方程y0=kx0+b。即点(x0,y0)确定了一组直线。方程y0=kx0+b在参数k--b平面上是一条直线(你也可以是方程b=-x0*k+y0对应的直线)。这样,图像x--y平面上的一个前景像素点就对应到参数平面上的一条直线。我们举个例子说明解决前面那个问题的原理。设图像上的直线是y=x, 我们先取上面的三个点:A(0,0), B(1,1), C(2,2)。可以求出,过A点的直线的参数要满足方程b=0, 过B点的直线的参数要满足方程1=k+b, 过C点的直线的参数要满足方程2=2k+b, 这三个方程就对应着参数平面上的三条直线,而这三条直线会相交于一点(k=1,b=0)。同理,原图像上直线y=x上的其它点(如(3,3),(4,4)等) 对应参数平面上的直线也会通过点(k=1,b=0)。 应用 这个性质就为我们解决问题提供了方法:首先,我们初始化一块缓冲区,对应于参数 平面,将其所有数据置为0.对于图像上每一前景点,求出参数平面对应的直线,把这 直线上的所有点的值都加1。最后,找到参数平面上最大点的位置,这个位置就是原 图像上直线的参数。上面就是霍夫变换的基本思想。就是把图像平面上的点对应到参 数平面上的线,最后通过统计特性来解决问题。假如图像平面上有两条直线,那么最 终在参数平面上就会看到两个峰值点,依此类推。在实际应用中,y=k*x+b形式的直 线方程没有办法表示x=c形式的直线(这时候,直线的斜率为无穷大)。所以实际应用 中,是采用参数方程p=x*cos(theta)+y*sin(theta)。这样,图像平面上的一个点就 对应到参数p—theta平面上的一条曲线上。其它的还是一样。 应用实例1
边缘检测与Hough变换 实验目的:写一段代码实现一幅图像,其中分为以下两个步骤 1.使用Matlab中的canny算子进行边缘检测,可以让使用者交互式的输入不同 的Sigma的值实现边缘检测。 2.运用Hough变换来找到最突出的边缘,在图像中找到并画出最长的直线。 实验原理: canny算子边缘检测的基本原理是:采用二维高斯函数的任一方向上的一阶方向 导数为噪声滤波器,通过与图像f(x,y)卷积进行滤波,然后对滤波后的图像 寻找图像梯度的局部极大值,以确定图像边缘。 Canny边缘检测算子是一种最优边缘检测算子。其实现步骤如下: 1)用高斯滤波器平滑图像 2)计算滤波后图像梯度的幅值和方向 3)对梯度幅值应用非极大值抑制,其过程为找出图像梯度中的局部极大值点,把其他非局部极大值置零,以得到细化的边缘; 4)再用双阈值算法检测和连接边缘; 使用canny算子的edge函数调用格式为 BW=edge(I,'canny'); BW=edge(I,'canny',thresh,sigma); BW=edge(I,'canny',thresh); [BW,threshold]=edge(I,'canny',…); 2.Hough变换时最常用的直线提取方法,它的基本思想是:将直线上每一个 数据点变换为参数平面中的一条直线或曲线,利用共线的数据点对应的参数 曲线相交于参数空间中一点的关系,使得直线提取问题转化为计数问题。 Hough变换提取直线的主要优点是受直线中的间隙和噪声影响较小。 Hough检测直线的Matlab实现:在Matlab图像处理工具箱中提供了3个与 Hough变换有关的函数,分别为hough函数,houghpeaks函数和houghlines 函数。 hough函数的调用格式为[H,theta,rho]=hough(BW);其中BW为二值图像, H为Hough变换矩阵,theta为变换轴间隔θ,rho为元素个数。 Houghpeaks函数是用来提取Hough变换后参数平面上的峰值点。其调用格 式为peaks=houghpeaks(H,numpeaks),其中,H为Hough函数的输出,参数平 面的技术结果矩阵,参数numpeaks为指定要提取的峰值数目,默认值为1; 输出参数peaks为Q*2维峰值位置矩阵,其中Q为提取的峰值数目,peaks 的第q行分别存储第q个峰值的行和列坐标。 Hough函数用于在图像中提取参数平面上的峰值点对应的直线。其调用格式为lines=houghlines(BW,theta,rho,peaks) Lines=houghlines(…,param1,val1,param2,val2) 其中,BW与Hough函数的BW相同,为二值图象。theta和rho为hough 函数返回的输出,指示θ轴和ρ轴各个单元对应的值。Peaks为houghpeaks 函数返回的输出,指示峰值的行和列坐标,houghlines函数将根据这些峰值 提取直线。Param和val是参数对,用于指定是否合并或保留直线段的相关 参数,其取值有两种。当param=’MinLength’时,bal指定合并后的直线被保 留的门限长度,长度小于val的直线被舍去。当param=’FillGap’时,val指定 直线段被合并的门限间隔。如果两条斜率和截距均相同的直线段间隔小于
实验一-基尔霍夫定律
实验一基尔霍夫定律验证 ★实验 一、实验目的 1、验证基尔霍夫定律的正确性,加深对基尔霍夫定律的理解。 2、学会用电流插头,插座测量各支路电流的方法。 3、通过实验加强对电压、电流参考方向的掌握和运用的能力。 二、原理说明 基尔霍夫定律是电路的基本定律分为为两个方面,即基尔霍夫电流定律(KCL)和基尔霍夫电压定律(KVL)。 1、基尔霍夫电流定律(KCL):在集总电路中,在任何一个时刻,对电路中的任何一个节点,流出(或流入)该节点电流的代数和恒等于零,即∑I=0,KCL 反映了电流的连续性,说明了节点上各支路电流的约束关系,它与电路中元件的性质无关。 2、基尔霍夫电压定律(KVL):在任何一个时刻,按约定的参考方向,电路中任一回路上全部元件两端电压的代数和恒等于零,即∑U =0,KVL说明了电路中各段电压的约束关系,它与电路中元件的性质无关。 基尔霍夫定律是电路的基本定律,测量某电路的各支路电流及多个元件两端的电压,应能分别满足基尔霍夫电流定律和电压定律。即对电路中的任一个节点而言的,应有∑I=0;对任何一个闭合回路而言,在验证KCL电流定律,可选一个电路节点,按标定的参考方向测定出各支路电流值,并约定流入或流出该节点的电流为正。在验证KVL电流定律通常规定:凡支路或元件电压的参考方向与
回路绕行方向一致者取正号,反之取负号。 运用上述定律是必须注意电流的正方向,此方向可预先任意设定。 三、实验设备 天煌教仪电子电工实验台,基尔霍夫定律验证实验板。或是: 1. 直流电压源1台0~30V可调;1组+12V固定 2. 数字万用表1块 3. 电阻5只510W×3;1KW×1;330W×1 4. 短接桥和连接导线若干 5. 实验用插件电路板1块297mm×300mm 四、实验内容和步骤 实验线路如图1-1所示 1.实验前先任意设定三支路的电流参考方向,如图中的I1,I2,I3所示,并熟悉线路结构,掌握各开关的操作使用方法。 2.分别将E1,E2两路直流稳压源(E1为+6V、+12V切换电源,E2为0~30V可调直流稳压源)接入电路,令E1=6V,E2=12V。 3.熟悉电流插头的结构,将电流插头的两端接至数字毫安表的“+、-”两端。 4.将电流插头分别插入三条支路的三个电流插座中,读出并记录电流值。 5.用直流数字电压表分别测量两电路电源及电阻元件的电压值,记入数据表中。
图像处理之霍夫变换(直线检测算法) 霍夫变换是图像变换中的经典手段之一,主要用来从图像中分离出具有某种相同特征的几何 形状(如,直线,圆等)。霍夫变换寻找直线与圆的方法相比与其它方法可以更好的减少噪 声干扰。经典的霍夫变换常用来检测直线,圆,椭圆等。 霍夫变换算法思想: 以直线检测为例,每个像素坐标点经过变换都变成都直线特质有贡献的统一度量,一个简单 的例子如下:一条直线在图像中是一系列离散点的集合,通过一个直线的离散极坐标公式, 可以表达出直线的离散点几何等式如下: X *cos(theta) + y * sin(theta) = r 其中角度theta指r与X轴之间的夹角,r为 到直线几何垂 直距离。任何在直线上点,x, y都可以表达,其中r,theta是常量。该公式图形表示如下: 然而在实现的图像处理领域,图像的像素坐标P(x, y)是已知的,而r, theta则是我们要寻找 的变量。如果我们能绘制每个(r, theta)值根据像素点坐标P(x, y)值的话,那么就从图像笛卡
尔坐标系统转换到极坐标霍夫空间系统,这种从点到曲线的变换称为直线的霍夫变换。变换 通过量化霍夫参数空间为有限个值间隔等分或者累加格子。当霍夫变换算法开始,每个像素 坐标点P(x, y)被转换到(r, theta)的曲线点上面,累加到对应的格子数据点,当一个波峰出现 时候,说明有直线存在。同样的原理,我们可以用来检测圆,只是对于圆的参数方程变为如 下等式: (x –a ) ^2 + (y-b) ^ 2 = r^2其中(a, b)为圆的中心点坐标,r圆的半径。这样霍夫的参数空间就 变成一个三维参数空间。给定圆半径转为二维霍夫参数空间,变换相对简单,也比较常用。 编程思路解析: 1. 读取一幅带处理二值图像,最好背景为黑色。 2. 取得源像素数据 3. 根据直线的霍夫变换公式完成霍夫变换,预览霍夫空间结果 4. 寻找最大霍夫值,设置阈值,反变换到图像RGB值空间(程序难点之一) 5. 越界处理,显示霍夫变换处理以后的图像 关键代码解析: 直线的变换角度为[0 ~ PI]之间,设置等份为500为PI/500,同时根据参数直线参数方程的取值 范围为[-r, r]有如下霍夫参数定义: [java]view plaincopy 1.// prepare for hough transform 2.int centerX = width / 2; 3.int centerY = height / 2;
摘要 为能够有效解决实时直线图形提取问题,提出了一种基于Hough变换(HT)的直线提取算法。它所实现的是一种从图像空间到参数空间的映射关系。由于具有一些明显优点和可贵性质,它引起了许多国内外学者和工程技术人员的普遍关注。由于其根据局部度量来计算全面描述参数,因而对于区域边界被噪声干扰或被其他目标遮盖而引起边界发生某些间断的情况,具有很好的容错性和鲁棒性。多年来,专家们对Hough变换的理论性质和应用方法进行了深入而广泛的研究,目前应用于生物医学、自动化和机器人视觉、空间技术和军事防御、办公自动化等各个方面。 本次课称设计首先分析了数字图像中直线边缘的三种结构特征,提出采用基元结构表示目标边缘点,并在约束条件下计算基元结构的基元倾角。在此基础上,结合传统的HT的思想对基元结构进行极角约束HT,以获得最终的直线参数。最后,再用MATLAB软件对该算法进行编程仿真。实验结果表明,对合成图像和自然图像,该算法能够有效的识别图像中的直线段。 关键词:直线提取;Hough变换;MATLAB
目录 1. 课程设计的目的 (1) 2. MATLAB简介及应用 (1) 2.1 MATLAB简介 (1) 2.2 MATLAB应用 (1) 2.3 MATLAB特点 (2) 3. Hough变换原理 (2) 3.1 Hough变换的基本原理 (2) 3.2 Hough变换的不足之处 (4) 3.3 Hough变换的应用 (4) 4. Hough变换检测直线设计 (5) 4.1 Hough变换检测直线基本原理 (5) 4.2 Hough变换的几种基本算法 (6) 4.3 Hough变换算法的比较与选择 (7) 4.4 Hough变换检测直线的算法流程图 (9) 4.5 Hough变换检测直线算法的实现 (9) 5. 仿真结果及分析 (11) 5.1 仿真结果 (11) 5.2 结果分析 (14) 结论 (15) 参考文献 (16)
实验一基尔霍夫定律验证 ★实验 一、实验目的 1、验证基尔霍夫定律的正确性,加深对基尔霍夫定律的理解。 2、学会用电流插头,插座测量各支路电流的方法。 3、通过实验加强对电压、电流参考方向的掌握和运用的能力。 二、原理说明 基尔霍夫定律是电路的基本定律分为为两个方面,即基尔霍夫电流定律(KCL)和基尔霍夫电压定律(KVL)。 1、基尔霍夫电流定律(KCL):在集总电路中,在任何一个时刻,对电路中的任何一个节点,流出(或流入)该节点电流的代数和恒等于零,即∑I=0,KCL 反映了电流的连续性,说明了节点上各支路电流的约束关系,它与电路中元件的性质无关。 2、基尔霍夫电压定律(KVL):在任何一个时刻,按约定的参考方向,电路中任一回路上全部元件两端电压的代数和恒等于零,即∑U =0,KVL说明了电路中各段电压的约束关系,它与电路中元件的性质无关。 基尔霍夫定律是电路的基本定律,测量某电路的各支路电流及多个元件两端的电压,应能分别满足基尔霍夫电流定律和电压定律。即对电路中的任一个节点而言的,应有∑I=0;对任何一个闭合回路而言,在验证KCL电流定律,可选一个电路节点,按标定的参考方向测定出各支路电流值,并约定流入或流出该节点的电流为正。在验证KVL电流定律通常规定:凡支路或元件电压的参考方向与
回路绕行方向一致者取正号,反之取负号。 运用上述定律是必须注意电流的正方向,此方向可预先任意设定。 三、实验设备 天煌教仪电子电工实验台,基尔霍夫定律验证实验板。或是: 1. 直流电压源1台0~30V可调;1组+12V固定 2. 数字万用表1块 3. 电阻5只510W×3;1KW×1;330W×1 4. 短接桥和连接导线若干 5. 实验用插件电路板1块297mm×300mm 四、实验内容和步骤 实验线路如图1-1所示 1.实验前先任意设定三支路的电流参考方向,如图中的I1,I2,I3所示,并熟悉线路结构,掌握各开关的操作使用方法。 2.分别将E1,E2两路直流稳压源(E1为+6V、+12V切换电源,E2为0~30V可调直流稳压源)接入电路,令E1=6V,E2=12V。 3.熟悉电流插头的结构,将电流插头的两端接至数字毫安表的“+、-” 两端。 4.将电流插头分别插入三条支路的三个电流插座中,读出并记录电流值。 5.用直流数字电压表分别测量两电路电源及电阻元件的电压值,记入数据表中。
实验二基尔霍夫定律的验证姓名学号专业实验台号实验时间 一、实验目的 1.通过实验验证基尔霍夫电流定律和电压定律 2.加深理解“节点电流代数和”及“回路电压代数和”的概念 3.加深对参考方向概念的理解 二、原理 基尔霍夫节点电流定律 I 0 基尔霍夫回路电压定律 U 0 参考方向: 当电路中的电流(或电压)的实际方向与参考方向相同时取正值,其实际方向与参考方向相反时取负值。 三、实验仪器和器材 1. 0-30V 可调直流稳压电源 2. +15 直流稳压电源 3. 200mA可调恒流源 4.电阻 5.交直流电压电流表 6.实验电路板 7.短接桥 8.导线 四、实验内容及步骤 1.验证基尔霍夫电流定律(KCL) 可假定流入该节点的电流为正(反之也可),并将电流表负极接在节点接口上,电流表正极接到支路接口上进行测量。测量结果如2-1 所示。 表 2-1 验证基尔霍夫电流定律 计算值测量值误差 I 1 (mA) I 2 (mA) I 3(mA) 0 0 0 I
图 2-1 2. 验证基尔霍夫回路电压定律( KVL ) 用短接桥将三个电流接口短接 ,测量时可选顺时针方向为绕行方向,并注意电压表的 指针偏转方向及取值的正与负,测量结果如表 2-2 所示。 表 2-2 验证基尔霍夫电压定律 U U U U U U U U AB BE EF FA 回路 BC CD DE EB 回路 U U 计算值 -10 15 测量值 误差 图 2-2 五、思考题 1. 利用表 2-1 和表 2-2 中的测量结果验证基尔霍夫两个定律。 结点 B ,流入电流与流出电路代数和为零, KCL 成立。一定误差范围内,在一个闭合回路中,电压的代数和为 0, KVL 成立。 2. 利用电路中所给数据, 通过电路定律计算各支路电压和电流, 并计算测量值与计算值之间的误差,分析误差产生的原因。 电表精度不够,有电阻非理想电表;导线有电阻。 3. 回答下列问题 ( 1)已知某支路电流约为 3mA ,现有一电流表分别有 20mA 、200mA 和 2A 三挡量程,你 将使用电流表的哪档量程进行测量?为什么? 20mA,在不超量程的情况下应选小量程,以使读数更加精确 ( 2)改变电流或电压的参考方向,对验证基尔霍夫定律有影响吗?为什么? 没有。因为所求的和均为代数和,改变参考方向,所有数据的符号均改变,而 KCL 和 KVL 结果均为 0,所以无影响
图像处理之霍夫变换圆检测算法 一:霍夫变换检测圆的数学原理 根据极坐标,圆上任意一点的坐标可以表示为如上形式, 所以对于任意一个圆, 假设中心像素点p(x0, y0)像素点已知, 圆半径已知,则旋转360由极坐标方程可以得到每个点上得坐标同样,如果只是知道图像上像素点, 圆半径,旋转360°则中心点处的坐标值必定最强.这正是霍夫变换检测圆的数学原理. 二:算法流程 该算法大致可以分为以下几个步骤 三:运行效果
图像从空间坐标变换到极坐标效果, 最亮一点为圆心. 图像从极坐标变换回到空间坐标,检测结果显示: 四:关键代码解析 个人觉得这次注释已经是非常的详细啦,而且我写的还是中文注释[java]view plaincopy 1./** 2. * 霍夫变换处理 - 检测半径大小符合的圆的个数 3. * 1. 将图像像素从2D空间坐标转换到极坐标空间 4. * 2. 在极坐标空间中归一化各个点强度,使之在0?255之间 5. * 3. 根据极坐标的R值与输入参数(圆的半径)相等,寻找2D空间的像素点 6. * 4. 对找出的空间像素点赋予结果颜色(红色) 7. * 5. 返回结果2D空间像素集合 8. * @return int [] 9. */ 10.public int[] process() { 11.
12.// 对于圆的极坐标变换来说,我们需要360度的空间梯度叠加值 13. acc = new int[width * height]; 14.for (int y = 0; y < height; y++) { 15.for (int x = 0; x < width; x++) { 16. acc[y * width + x] = 0; 17. } 18. } 19.int x0, y0; 20.double t; 21.for (int x = 0; x < width; x++) { 22.for (int y = 0; y < height; y++) { 23. 24.if ((input[y * width + x] & 0xff) == 255) { 25. 26.for (int theta = 0; theta < 360; theta++) { 27. t = (theta * 3.14159265) / 180; // 角度值0 ~ 2*PI 28. x0 = (int) Math.round(x - r * Math.cos(t)); 29. y0 = (int) Math.round(y - r * Math.sin(t)); 30.if (x0 < width && x0 > 0 && y0 < height && y0 > 0) { 31. acc[x0 + (y0 * width)] += 1; 32. } 33. } 34. } 35. } 36. } 37. 38.// now normalise to 255 and put in format for a pixel array 39.int max = 0; 40. 41.// Find max acc value 42.for (int x = 0; x < width; x++) { 43.for (int y = 0; y < height; y++) { 44. 45.if (acc[x + (y * width)] > max) { 46. max = acc[x + (y * width)]; 47. } 48. } 49. } 50. 51.// 根据最大值,实现极坐标空间的灰度值归一化处理 52.int value; 53.for (int x = 0; x < width; x++) { 54.for (int y = 0; y < height; y++) {
数字图像处理第八次作业 实验内容 1、拍摄一张包含硬币、橡皮等物品的照片,通过Hough 变换检测出圆形的硬币个数并区分不同半径的硬币。最终计算出照片中的总钱数。 解:Hough 变换的实质是对图像进行坐标的变换,将图像空间的线条变为参数空间的聚集点,从而将原始图像中检测给定形状的曲线问题,变成寻找参数空间中的峰点的问题。 它不仅可以检测直线,而且可以很方便地检测圆、椭圆和抛物线等形状。由于这里需要检测圆形的硬币,所以下面给出检测圆的具体方法: 因为圆的图像空间方程为:222()()x a y b r -+-=, 我们需要通过Hough 变换,将图像空间(,)x y 对应到参数空间(,,)a b r ,然后对其进行累加完成检测。但是显然这种方法的计算量是非常大的,所以一般都是先对灰度图像进行边缘提取,利用边界像素的灰度梯度信息估计出下式中的角度θ,以此来降低计算量: cos cos a x r b y r θ θ=-*??=-*? (1) 一般在检测过程中需要对图像进行预处理,使得检测更加准确和容易。检测过程如下所示: ○ 1真彩色图像转为灰度图像; ○ 2去除噪声,进行中值滤波; ○ 3转为二值图像,利用边缘算子进行图像边缘提取; ○ 4最后进行图像的平滑和填充。 这里处理的图像并没有太多噪声,所以处理的时候略去了中值滤波的步骤,直接对边缘提取后的图像进行Hough 变换检测圆形。 根据式(1),我们需要对半径r 和角度θ进行搜索,所以这里应该首先设置半径和角度方向的搜索步长step_r 和step_angle ,接着给出半径搜索的最大和最小值,当然这两个数值需要根据经验来自己确定。最后就可以根据这些确定半径和角度的最大搜索次数。
报告编号:YT-FS-3662-30 基尔霍夫定律实验报告范 本(完整版) After Completing The T ask According To The Original Plan, A Report Will Be Formed T o Reflect The Basic Situation Encountered, Reveal The Existing Problems And Put Forward Future Ideas. 互惠互利共同繁荣 Mutual Benefit And Common Prosperity
基尔霍夫定律实验报告范本(完整 版) 备注:该报告书文本主要按照原定计划完成任务后形成报告,并反映遇到的基本情况、实际取得的成功和过程中取得的经验教训、揭露存在的问题以及提出今后设想。文档可根据实际情况进行修改和使用。 一、实验目的 (1)加深对基尔霍夫定律的理解。 (2)学习验证定律的方法和仪器仪表的正确使用。 二、实验原理及说明 基尔霍夫定律是集总电路的基本定律,包括电流定律(KCL)和电压定律(KVL)。 基尔霍夫定律规定了电路中各支路电流之间和各支路电压之间必须服从的约束关系,无论电路元件是线性的或是非线性的,时变的或是非时变的,只要电路是集总参数电路,都必须服从这个约束关系。 (1)基尔霍夫电流定律(KCL)。在集总电路中,任何时刻,对任一节点,所有支路电流的代数和恒等于
零,即∑i=0。通常约定:流出节点的支路电流取正号,流入节点的支路电流取负号。 (2)基尔霍夫电压定律(KVL)。在集总电路中,任何时刻,沿任一回路所有支路电压的代数和恒等于零,即沿任—回路有∑u=0。在写此式时,首先需要任意指定一个回路绕行的方向。凡电压的参考方向与回路绕行方向一致者,取“+”号;电压参考方向与回路绕行方向相反者,取“一”号。 (3)KCL和KVL定律适用于任何集总参数电路,而与电路中的元件的性质和参数大小无关,不管这些元件是线性的、非线性的、含源的、无源的、时变的、非时变的等,定律均适用。 三、实验仪器仪表 四、实验内容及方法步骤 (1)验证(KCL)定律,即∑i=0。分别在自行设计的电路或参考的电路中,任选一个节点,测量流入流出该节点的各支路电流数值和方向,记入附本表1-1~表1-5中并进行验证。参考电路见图1-1、图1-2、图
数字图像处理实验报告 实验题目:Hough变换检测直线 专业班级:电科1001 学生姓名:赵 学号:201048360102 指导老师:王贵财 时间:2012-2013-2
Hough变换检测直线 一.实验目的 实现用Hough变换检测直线的算法 二.实验要求 (1)找一幅或多幅(两幅以上)包含直线形状的图像,检测出图像中的多条直线; (2)分析并显示各直线的角度、长度。 三.实验原理 Hough变换是利用图像全局特性而将边缘像素连接起来组成区域封闭边界的一种方法。在预先知道区域形状的条件下,利用Hough变换可以方便的得到边界曲线而将不连续的像素边缘点连接起来。Hough 变换的主要优点是受噪声和曲线间断的影响小。利用Hough变换可以直接检测某些已知形状的目标,如直线。 Hough变换的基本思想是点线的对偶性。一方面,图像空间中共线的点对应在参数空间里相交的线;另一方面,在参数空间中相交于同一个点的所有直线在图像空间里都有共线的点与之对应。因此Hough 变换把在图像空间中的直线检测问题转换到参数空间中对点的检测问题,通过在参数空间里进行简单的累加统计完成检测任务。如果参数空间中使用直线方程,当图像空间直线斜率为无穷大时,会使累加
器尺寸和变很大,从而使计算复杂度过大。为解决这一问题,采用直线极坐标方程,变换方程如图1所示。 ρ= xcosθ+ysinθ 根据这个方程,原图像空间中的点对应新参数空间中的一条正弦曲线,即点- 正弦曲线对偶。检测直线的具体过程就是让θ取遍可能的值,然后计算ρ的值,再根据θ和ρ的值对累加数组累加,从而得到共线 点的个数。下面介绍θ和ρ取值范围的确定。设被检测的直线在第一象限,右上角坐标为( m, n) ,则第一象限中直线的位置情况如图1所示。 图一 由图可见,当直线从与x轴重合处逆时针旋转时,θ的值 开始由0°增大,直到180°,所以θ的取值范围为0°~180°。由 直线极坐标方程可知: ,其中Φ= ,所以当且仅当x和y都达到最大且θ+ Φ=±90°时(根据<来调整θ的值) , | ρ| =| ρ| max =
Hough 变换直线检测是直接按照hough 变换的定义来进行的, 算法如下: 1) 对原始的图像进行二值化, 假设0代表背景, 1代表物体特征点; 2) 在参数空间ρ, θ里建立一个累加的数组[],H ρθ , 并且置数组H 中的每 一个元素的初值都为零; 对于二值图像中每个以1 表示的点(,)x y , 我们让θ取遍θ轴上所有可能的值, 并根据式(3-3)计算对应的ρ; 再根据ρ与θ的值(假设都已经取整) 对数组进行累加计算([][],,1H H ρθρθ=+) ; 3) 然后对数组[],H ρθ 进行局部的峰值检测, 得到被检测直线的参数ρ和θ。上述的算法受直线中的间隙与噪声的影响较小, 鲁棒性比较强,但其具有运算量太大的缺点, 极端情况下, 它的运算复杂度为3 ()n ο 。 传统随机hough 变换的具体算法如下: (a)构造一个边缘点集D , 然后初始化参数单元集P NULL = ,循环的次数K = 0 ; (b)从D 中随机的选取3 个点; (c)由这3个点解特征的参数p ; (d)在P 中寻找一个c p ,使它满足p c p δ-≤,如果找到则转(f);否则就转(e); (e)将p 插入到P 中,其对应的计数值变为1,转(g); (f)将c p 所对应的计数的值加1,如果小于指定阈值t N ,转(g);否则就转(h); (g)1k k =+;如果 max k k > ,则结束;否则,转(b); (h)c p 是候选圆的特征参数,如果该参数对应圆上的边缘的点数min pc M M >,转(i); (i) c p 是真实的圆参数,把落在参数c p 对应的特征上的点从D 中去除,然 后判断已经检测到的圆的数目是否已达到规定的数目,若是就结束,否 则的话重置P NULL =,0K =,转(b)。 其中max k 是规定的检测一个圆的过程中所允许采样的最大的循环次数。min M 为圆所必需的最小的点数, 通常设为2r πλ,其中λ是一个固定系数,r 是候选圆的半径。P 是参数空间中的参数单元的集合,它是一个动态的链表结构。pc M 是图像空间中落到了候选圆上的点数。
实验一基尔霍夫定律的验证 一、实验目的 1、掌握万用表和实验装置上直流电工仪表和设备的使用方法。 2、验证基尔霍夫原理的正确性,从而加深对线性电路的基尔霍夫原理的认识和理解。 二、实验设备 三、原理说明 基尔霍夫电流定理(KCL):对于任何集总参数电路的任一结点,在任一时刻,流出该结点全部支路电流的代数和等于零。 (流出该结点的支路电流取正号,流入该结点的支路电流取负号。)基尔霍夫电压定律(KVL):对于任何集总参数电路的任一回路,在任一时刻,沿该回路全部支路电压的代数和等于零。 (电压参考方向与回路绕行方向相同的支路电压取正号,与绕行方向相反的支路电压取负号。) 由支路组成的回路可以视为闭合结点序列的特殊情况。沿电路任一闭合路径(回路或闭合结点序列)各段电压代数和等于零。 四、实验内容 实验电路如图2-1所示 1、熟悉使用仪器,注意仪器的量程范围。 2、按图2-1电路接线,E 为+12、E2为+6V电源。 1 3、用万用表直流电压档和毫安表(接电流插头)测量各支路电流及数据记入表格中。
图 2-1 4、验证 1)基尔霍夫电流方程 (取节点B或D点, 说明什么?) 2)基尔霍夫电压方程 (采用任一回路,说明什么?) 五、实验注意事项 1、测量各支路电流时,应注意仪表的极性, 及数据表格中“+、-”号的记录。 2、注意仪表量程的及时更换。 六、思考题和心得体会 1、实验中若E 1、E 2 分别单独作用,在实验中应如何操作?可否直接将不作 用的电源(E 1或E 2 )置零(短接)? 2、实验电路中,测量的正负值使用不当,试问基尔霍夫定律还成立吗? 3、心得体会及其他。
基于matlab的霍夫变换 一、简单介绍 Hough变换是图像处理中从图像中识别几何形状的基本方法之一。Hough变换的基本原理在于利用点与线的对偶性,将原始图像空间的给定的曲线通过曲线表达形式变为参数空间的一个点。这样就把原始图像中给定曲线的检测问题转化为寻找参数空间中的峰值问题。也即把检测整体特性转化为检测局部特性。比如直线、椭圆、圆、弧线等。 二、基本原理 Hough变换的基本原理在于,利用点与线的对偶性,将图像空间的线条变为参数空间的聚集点,从而检测给定图像是否存在给定性质的曲线(圆的方程为:(x-a)^2+(y-b)^2=r^2,通过Hough变换,将图像空间对应到参数空间)。 霍夫变换是图像处理中从图像中识别几何形状的基本方法之一,应用很广泛,也有很多改进算法。最基本的霍夫变换是从黑白图像中检测直线(线段)。 三、hough变换检测直线 设已知一黑白图像上画了一条直线,要求出这条直线所在的位置。我们知道,直线的方程可以用y=k*x+b 来表示,其中k和b是参数,分别是斜率和截距。过某一点(x0,y0)的所有直线的参数都会满足方程y0=kx0+b。即点 (x0,y0)确定了一族直线。方程y0=kx0+b在参数k--b平面上是一条直线,(你也可以是方程b=-x0*k+y0对应的直线)。如下图1所示: 从图1中可看出,x-y坐标和k-b坐标有点----线的对偶性。x-y坐标中的点P1、P2对应于k-b坐标中的L1、L2;而k-b坐标中的点P0对应于x-y坐标中的线L0 。 这样,图像x--y平面上的一个前景像素点就对应到参数平面上的一条直线。我们举个例子说明解决前面那个问题的原理。设图像上的直线是y=x, 我