E D I T I O N 11/2004
maxon motor ag Brünigstrasse 220CH-6072 Sachseln T él.:+41 (0)41 666 15 00 Fax:+41 (0)41 666 16 https://www.doczj.com/doc/a36390543.html,
2maxon micro drive November 2004 edition / subject to change
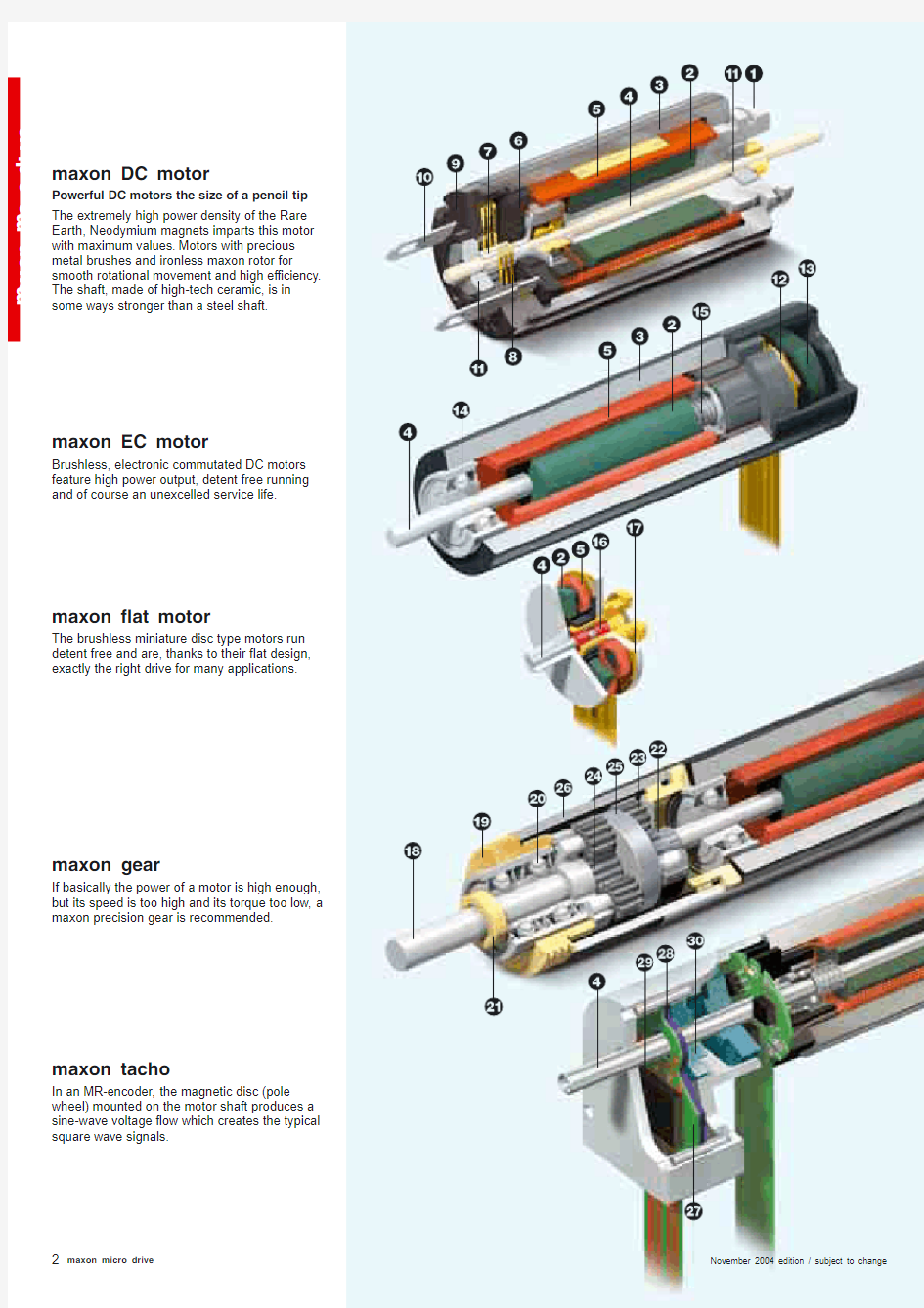
maxon DC motor
Powerful DC motors the size of a pencil tip The extremely high power density of the Rare Earth,Neodymium magnets imparts this motor with maximum values.Motors with precious metal brushes and ironless maxon rotor for smooth rotational movement and high efficiency. The shaft,made of high-tech ceramic,is in some ways stronger than a steel shaft. maxon EC motor
Brushless,electronic commutated DC motors feature high power output,detent free running and of course an unexcelled service life. maxon flat motor
The brushless miniature disc type motors run detent free and are,thanks to their flat design, exactly the right drive for many applications. maxon gear
If basically the power of a motor is high enough, but its speed is too high and its torque too low,a maxon precision gear is recommended. maxon tacho
In an MR-encoder,the magnetic disc(pole wheel)mounted on the motor shaft produces a sine-wave voltage flow which creates the typical square wave signals.
Electronics
Miniature
●Precise, play-free and quick positioning
●Assigned power rating 1.2 Watt
●Micro Harmonic Drive
with reduction ratio 160 :
output torque
●100 pulse encoder
●Hollow shaft, drill hole diameter 0.65 mm
EC6?6mm,brushless,1.2Watt
November 2004 edition / subject to change
maxon micro drive
9
Planetary Gearhead GP 6?6
mm,0.002-0.03Nm
Technical data
Planetary Gearhead GP 8B ?8mm,0.002-0.03Nm
Technical data
Planetary Gearhead
straight teeth Output shaft
stainless steel Bearing at output
ball bearings*Radial play,5mm from flange max.0.12mm Axial play
0.02-0.10mm
Max.radial load,5mm from flange 5N Max.permissible axial load
5N Max.permissible force for press fits 10N
Sense of rotation,drive to output =
Recommended input speed
<40000rpm Recommended temperature range
-15…+100°C
*Option:sleeve bearing
M 2:1
10
maxon micro drive
November 2004 edition / subject to change
Positioning Drive Unit
Miniature positioning drive unit
●Brushless maxon EC motor EC 6 with assigned power rating 1.2 Watt
●Micro Harmonic Drive ?gearhead with a 10 mNm output torque, in 3 different reduction ratio versions ●2-channel 100 pulse MR encoder –M agneto R esistance Encoder
●
Precise:100 encoder pulses produce a
play-free operating angle of 0.0225 degrees at a 160:1 gearhead reduction ratio
●
Hollow shaft (only with 160:1 gearhead reduction ratio) with drill hole diameter 0.65 mm for extended applications, for example:air, vacuum, light
Micro Harmonic Drive ?
?8mm 0.01Nm
Digital MR Encoder
Play-free micro gearhead
1Sun gearwheel fixed firmly to the motor shaft
2
Planetary wheel,elastically moldable
2
1Housing
2Electrical connection 3Print
4Motor shaft 5MR sensor 6ASIC
7
Magnetic multi-pole wheel
High resolution micro-encoder
1
2
345673Flexspline,elastically moldable ring (ellipse)with internal and external toothing 4
Circular spline,internal gear,
two more cogs than the Flexspline
3
4
12
November 2004 edition / subject to change maxon micro drive
11
Summary EC Servoamplifier Application Information
O n l i n e c o m m a n d i n g
Operation with online commanding by PC through RS232or by CAN Bus Master (PC,SPS,Soft SPS)Typical applications automation tasks
production machinery
work equipment manufacturing Order number
EPOS 24/1,24V,1A
280938
for EC 6with Hall sensor and digital MR Encoder
EPOS
●Point to point control unit ●1-Axis controller
●Multiple axis systems by networking via CAN Bus ●CANopen
●For DC and EC motors ●Digital inputs / outputs ●Analog inputs ●Modular design
●
'stand-alone' version in preparation
57
36
73
.4
50
.8
20
2
9.7
The maxon group is perfoming well despite the worldwide economic turbulence.
With a global workforce of around 1000, this company is a leading supplier of high-precision drive technology up to 500 W output power.Back on Mars! Yes, and again with maxon motors. After the successful mission with “Sojourner” in 1997, in 2004 both the rovers “Spirit” and “Opportunity” are driven
by 39 maxon motors.
maxon DC motors are high quality DC micromotors.The patented moving coil rotor represents the heart of the motor.Electronically commutated DC servomotors with no detent for maximum service life.
The innovative DC motor program with even greater performance and quality
data at impressive condi-tions.
The high-power
range DC motor, with
top performance and
convincing quality.
Same design as the
innovative and award
winning A-max
range.The new EC motor program picks up the ideology of the successful A-max and RE-max motors.Modular system with gearheads, sensors and brakes.
EC flat motors are
brushless motors
with a flat design
for when space is
limited.
Precision spur and
planetary gearheads
matched to maxon
motors.
Micro drives less than
10 mm in diameter
High-tech ceramic
components –
MIM/CIM technology
An extensive range of electronic
control systems meets your every
need in terms of performance and
speed accuracy.
High resolution analog and digital
tachos through to absolute trans-
mitters guarantee highly dynamic
control systems with our precision
motors.
Order the new maxon catalogue
04/05 with CD-ROM and maxon
selection program.288 pages of
comprehensive information on
motors, gearheads, tachos and
controls.
技术讲座?TECHN I CAL L ECTURE 电机控制集成电路的选用 第十三讲 微型电机驱动控制芯片M A X 1749的应用 吴红星,邹继明 (哈尔滨工业大学,黑龙江 哈尔滨 150001) 摘 要:主要介绍小型直流电动机驱动控制芯片M A X 1749的应用,阐述了该芯片的内部结构、工作特点以及其独特的控制功能,给出了该芯片典型应用电路图并加以说明。关键词:驱动控制;直流电机;过热保护 中图分类号:TM 301.2 文献标识码:C 文章编号:1001-6848(2001)03-0043-02 收稿日期:2001-04-18 1 概 述 小型震动电机被用于许多领域,如手机、传呼机、小型按摩器等。其电量的来源都是由内部电池提供,电压较低,电流较小。在上述用途中,共同的要求是此电机的驱动控制器体积小、控制功能全、耗能小、使用方便。M A X 1749是一种专用的、性能优良的小型震动电机控制及驱动芯片,它可提供恒定的驱动功率,电源电压可以在2.5~6.5V 浮动,可以提供1.5V 到电源电压的输出电压,最大120mA 的输出电流。 2 M A X 1749引脚及功能说明 M A X 1749体积小,具有5个引脚,引脚定义如 下: 第一引脚ON O FF :控制输出端。当为高电平时,输出端有电压;当为低电平时,输出端关断。 第二引脚GND :芯片地引脚。电路板要求有较大的焊点,给芯片散热,降低芯片的工作温度。 第三引脚I N :电源输入端。输入电压2.5 ~615V 可调,可与地之间接1ΛF 电容。 第四引脚OU T :芯片输出端。输出电压在115V 到输入电源电压可调,最大输出电流可达120mA ,可与地之间接1ΛF 电容。 第五引脚SET :输出电压反馈输入端。可外接115V 输出电压,也可外接电阻调节控制输出电压。 M A X 1749性能优异,具有输出电压可调、低功耗、过热保护、过流保护、电源短路保护、较低 M O SFET 关开通 截止电流等特点。其内部集成了M O SFET 功率管、 温度传感器、比较放大器、迅速切断电源电路及逻辑开关等,结构见图1。115V 参考电压与内部运算放大器的负端相连,它和运放另一个输入端(电压反馈信号)进行比较,差值说明了输出电压和调节电压的差异,并提供有关信号给M O SFET 驱动电路,适当地调整输出电流。当反馈电压低于参考电压时,驱动电路根据情况改变驱动信号,而增大输出电流和电压;相反,当反馈电压高于参考电压时,驱动电路根据情况改变驱动信号,减小输出电流和电压,使输出电流、电压达到稳定 。 图1 M A X 1749内部结构示意图 M A X 1749内部有过热保护功能,它限定了总热损耗功率,当节温超过170℃时,温度传感器给出 开关信号给逻辑开关电路,关闭M O SFET 功率管,使芯片冷却。当芯片的温度冷却到20℃时,温度传感器又将给出信号,使电路正常工作。当电源反向 — 34—电机控制集成电路的选用 第十三讲 微型电机驱动控制芯片M A X 1749 的应用 吴红星 邹继明
微型有刷电机具有价格便宜、容易操控的特点应用在各个领域,如电动玩具、美容产品、个人护理产品、医疗器械等等大多用到的都是微型有刷直流电机。有刷直流电机的工作原理是怎样的呢?下面天孚微电机就来带大家来了解:微型直流电机(有刷)的工作原理。 首先我们来了解电机的结构,几乎所有的有刷直流电机组件都是一样的,定子+电刷+换向器如下图所示。 1.定子 定子能在转子的周围产生固定的磁场,磁场可以是永磁体或者电磁绕组产生,微型有刷直流电机的分类是由定子或者电磁绕组链接到电源的方式来区别。 2. 转子 转子是由一个或者多个绕组构成,当绕组受到激励时,就会产生磁场,转子磁场的磁极和定子的磁场磁极相反,互相吸引,从而使转子旋转。在旋转过种中,转子会按照不同的顺序持续激励绕组,因此转子产生的磁极绝不会与定子产生的磁极重叠,这个过种叫做换向。 3. 电刷与换向器 微型有刷直流电机与无刷微型电机不同,不需要控制器来切换绕组的电流方向,遥是直接通过换向器进行换向。在微型有刷直流电机的转轴上有安装一个分片式铜套,这个就是换向器,电机在运转过程中,电刷会沿着换向器滑动,和换向器不同分片接触。这些分片与不同的转子绕组连接,当电刷通电时就会在电机内部产生动态磁场。也是这种原因,导致微型有刷直流电机磨损较为严重,导致电机使用寿命无法太长,这也是微型有刷直流电机的缺陷所在。
微型有刷直流电机的类型 1. 微型永磁体有刷直流电机 这种微型有刷直流电机是最常见的有刷电机,采用永磁体产生磁场,微型电机通的永磁体比绕组定子具有更高的效益,不过永磁体的磁性会随着时间衰退(永磁体只是一个名字,并不是真正的永磁)。有的永磁体微型直流电机还会加上绕组,防止磁性丢失。由于定子磁场的恒定的,所以永磁体有刷直流电机对电压变化响应非常快(下图为永磁体直流电机原理图)。
3V供电的微型直流电机的驱动,这种电机有两根引线,更换两根引线的极性,电机换向。该驱动电路要求能进行正反转和停止控制。 电路一: 如下图所示,些电路是作者最初设计的电路,P1.3、P2.2和P2.4分别是51单片机的IO引脚。设计的工作原理是:当P1.3高电平、P2.2和P2.4都为低电平时,电机正转。此时,Q1和Q4导通,Q2和Q3截止,电流注向为+5VàR1àQ1àMàQ4;当P1.3低电平、P2.2和P2.4都为高电平时,电机反转。此时,Q2和Q3导通,Q1和Q4截止。P2.2为高电平同时P2.4为低电平时,电路全不通,电机停止。 图中电阻:R1=20Ω,R2=R3=R4=510Ω 图1 但实际实验情况去出人意料,即电机正向和反向都不转。经测量,当P1.3高电平,P2.2和P2.4都为低电平时,Q4导通,但Q1不导通,P1.3的电平只有0.67V左右,这样Q1无法导通。 经分析原因如下:51的P1、P2、P3各引脚都是内部经电阻上拉,对地接MOSFET管,所谓高电平,是MOSFET截止,引脚上拉电阻拉为高电平。若此内部上拉电阻很大,比如20K,则当上图电路接上后,则流过Q1的b极的电流最大为(5-0.7)/20mA=0.22mA,难以动Q1导通。所以此电路不通。 总结:51单片机的引脚上拉能力弱,不足以驱动三极管导通。 电路二: 如下图所示:这个电路中四个三极管都采用PNP型,这样,导通的驱动是控制引脚输出低电平,而51的低电平时,是通过MOSFET接地,所以下拉能力极强。 但此电路的Q1和Q3需要分别控制,所需控制引脚较多。如果要用一个IO脚控制则可以加一个反相器。但此电路的Q1和Q3需要分别控制,所需控制引脚较多。如果要用一个IO脚控制则可以加一个反相器。如图3所示。图中标有各点实测电压值。
课题三 微电机控制电路 微电机控制电路使用1块CMOS集成电路、2只晶体管、2只电阻和1个双刀三掷开关,电路原理如图3-1所示。通过拨动转换开关K,它可以对直流电机实现正转、停止和反转的控制。该电路可以广泛用于电动玩具(如电码汽车)或日常用具(如电动窗帘)等,若配上遥控发射和接受电路,还可以实现对玩具和窗帘等的遥控。 一、工作原理 与非门G1A、G1B的输出端(分别为集成电路6脚和9脚)分别与两个晶体管的集电极相连接,作为电路的输出端接接至微型电机的两个输入端。与非门G1A的输入端(4脚)与G1B的输出相连,G1B的输入端(11脚)与G1A的输出相连。两个晶体管的基极也分别通过限流电阻加至对方与非门的输出端,从而构成一双稳态电路。与非门G1A、G1B的另一个输入端(5脚和10脚)与开关K的两定触点A、B相连,作为控制信号输入端。由图2.18中的开关K的连接方式可知,当拨动开关K时,A、B两端的逻辑电平分别为01、00、10三种状态,分别对应电机的正转、停止和反转。下面就按这3种状态分析电路的工作过程: 图3-1中开关K的位置使A点为低电平,B点为高电平。因此与非门G1A 输出高电平U O1=U OH≈V DD,这时与非门G1B的两个输入端均为高电平,所以其输出U O2=U OL≈0V。由于选用的CMOS与非门的驱动级是漏极开路的CMOS管,所以与非门具有较大灌电流而不能提供拉电流,故必须增加晶体管VT1、VT2来弥补G1A、G1B无拉电流的不足。因为这时U O1≈V DD通过R2加至晶体管VT2的基极使其截止,U O2≈0V,加至晶体管VT1的基极使其导通,VT1的导通电流经过导通的与非门G1B从左向右流过电机M,使电机产生正向转动。 当开关K往下拨一挡时,A、B两点的电位均为低电平,与非门G1A、G1B均截止而输出高电平,晶体管VT1、VT2的基极由于都加上高电平也截止,电机两端均为高电平,即加至电机两端的电压为0V,所以电机停止转动。 当开关再往下拨一挡时,A点为高电平,B点为低电平,电路的工作状态与正转状态刚好相反,所以电机反转。
微型电机的简单介绍 概述 微型电机指直径小于160mm或额定功率小于750W或具有特殊性能、特殊用途的电机。微特电机综合了电机、微电子、电力电子、计算机、自动控制、精密机械、新材料等多门学科的高新技术行业,尤其是电子技术和新材料技术的应用促进了微特电机技术进步。 微特电机品种众多(达5000余种)、规格繁杂、市场应用领域十分广泛,涉及国民经济、国防装备、人类生活的各个方面,凡是需要电驱动的场合都可以见到微特电机。 微特电机制造工序多,涉及精密机械、精细化工、微细加工、磁材料处理、绕组制造、绝缘处理等工艺技术,需要的工艺装备数量大、精度高,为了保证产品的质量还需一系列精密的测试仪器,是投资性较强的行业。 简而言之,微特电机行业是劳动密集型和技术密集型的高新技术产业。 主要应用领域: ①无特殊控制要求的驱动场合作为运动机械负载的动力源。例如,玩具汽车、模型飞机中的动力驱动装置。 ②音像设备。例如,在盒式录像机中,微特电机既是磁鼓组件的关键元件,又是其主导轴驱动、收供带和磁带盒的自动装载以及磁带张力控制的重要元件。 ③办公自动化设备、计算机外部设备和工业自动化设备。如磁盘驱动器、复印机、打印机、数控机床、机器人等都应用了微型电机。 产品特点: 微型电机是由永磁同步电动机和内置减速箱组合而成的可逆同步电动机,具有力矩大、噪音低、体积小、重量轻、使用方便、运行恒速等优点,还可以搭配
各种齿轮箱以达到改变输出速度和转矩的目的。 应用范围: 食品机械、纺织机械、医疗器械、安防设备、智能门窗、监控器云台、广告灯箱、家用电器、冷暖空调风页、执行器控制等所有小功率恒转速大力矩设备。 微型电机在结构上大体可分为3类: 1、电磁式 基本组成与普通电机相似,包括定子、转子、电枢绕组、电刷等部件,但形状比较小巧, 结构格外紧凑。 2、混合式 常见的有两种:上述各种微电机的组合;微电机与电子线路的组合。例如直流电动机与传感器的组合,X方向与Y方向直线电动机的组合等。 3、非电磁式 外形结构与电磁式一样,如旋转类产品作成圆柱形,直线类产品作成方形,但内部结构 因其工作原理不同而差别很大。 微型电机的主要应用产品:家用电器、健身器材、办公用品设备、机械设备、医疗器械、视听设备、安防设备、保健设备等等。
微电机的种类 作者:弘富泰公关部来源:发表时间:本站原创点击:215 微特电机门类繁多,大体可分为直流电动机、交流电动机、自态角电机、步进电动机、旋转变压器、轴角编码器、交直流两用电动机、测速发电机、感应同步器、直线电机、压电电动机、电机机组、其他特种电机等13大类。 微特电机在结构上大体可分为3类: ①电磁式。基本组成与普通电机相似,包括定子、转子、电枢绕组、电刷等部件,但结构格外紧凑。 ②组合式。常见的有两种:上述各种微电机的组合;微电机与电子线路的组合。例如直流电动机与传感器的组合,X方向与Y方向直线电动机的组合等。 ③非电磁式。外形结构与电磁式一样,如旋转类产品作成圆柱形,直线类产品作成方形,但内部结构因其工作原理不同而差别很大。 各类微特电机的性能差别很大,其性能参数难以统一阐明。一般说来,用于驱动机械的侧重于运行及起动时的力能指标;作电源用的要考虑输出功率、波形和稳定性;控制用微电机则偏重于静态和动态的特性参数。前两类电机的特性参数与普通电机相似。唯控制用微电机有其独特的特性参数。 ①工作特性。常用输出量与输入量,或一个输出量与另一个输出量之间的关系来表示。从控制要求来说,静态特性曲线应连续、光滑,没有突变;动态特性常用频率曲线或响应曲线来表示。频率曲线应平稳,无突跳振荡点;响应曲线应快速收敛。 ②灵敏度。对应于单位输入信号的输出量的大小。一般常用比力矩、比电动势、放大系数等表示。 ③精度。一定输入条件下,输出信号的实际值与理论值的差值代表微电机的精度,常用误差大小表示。④阻抗或电阻。在系统中,微电机的输入、输出阻抗应分别与相应电路匹配,保证系统的运行性能及精度。⑤可靠性。不仅是控制用微电机的特殊要求,驱动微电机和电源微电机也有此要求。常用使用寿命、失效率、可靠度和平均无故障时间等参数表征微电机的运行可靠性。 微特电机主要应用于3个领域: ①无特殊控制要求的驱动场合作为运动机械负载的动力源。 ②音像设备。例如,在盒式录像机中,微特电机既是磁鼓组件的关键元件,又是其主导轴驱动、收供带和磁带盒的自动装载以及磁带张力控制的重要元件。 ③办公自动化设备、计算机外部设备和工业自动化设备。如磁盘驱动器、复印机、数控机床、机器人等都应用了微特电机。
2019年第47卷第3期 T 综 述echnical review 曹富林等 NEMS 外场驱动微电机研究进展 77 收稿日期:2018-04-26NEMS 外场驱动微电机研究进展 曹富林,许立忠 (燕山大学,秦皇岛066004)摘 要:按照外场驱动微电机的驱动机制进行分类,简要介绍了各类微电机的制造工艺及应用前景,综述了各类微电机的研究与应用现状三指出了当前外场驱动微电机领域的研究热点,分析了微电机在实际应用中存在的困难三展望了外场驱动微电机未来的发展趋势及应用前景三 关键词:微纳米电机;纳机电系统;外场驱动;微电机;发展趋势;应用前景 中图分类号:TM359.9 文献标志码:A 文章编号:1004-7018(2019)03-0077-05 Advances in Research of NEMS Field-Driven Micromotors CAO Fu -lin ,XU Li -zhong (Yanshan University,Qinhuangdao,066004,China)Abstract :According to the drive mechanism of the micromotor driven by the external field,the classification and the manufacturing process and application prospect of various micromotors were briefly introduced.The research and application status of various micromotors were summarized.The current research hotspots of micro-motor driven by the external field were pointed out,and the difficulties in the practical application of the micro-motor were analyzed.The future development trend and application prospects of field-driven micromotors were forecasted. Key words :micro nano motor,nano electro mechanical system (NEMS),external field driven,micro motor,devel?opment trend,application prospect 0 引 言 各种新材料技术二微纳加工技术二传统机械的学 科交叉,为纳机电系统(以下简称NEMS)微电机的 发展注入了动力三微电机可利用内部化学燃料通过催化反应实现驱动;此外,尚可通过外部能量实现驱动,可借助于磁场二声场二电场二光场以及多场混合等外场方式产生驱动力三微电机在生物医学二航空航天以及通信工程中具有重要的应用,特别是在生物领域的应用尤为广泛,可以实现药物的定向投放,精密手术以及生物传感等功能三1987年,加州大学伯克利分校以硅为原材料,利用微加工技术制造出可转动微电机[1],此后各种尺寸二性能和驱动机制的新型微/纳米电机不断地被研制成功三微电机能够实现多种形式的机械运动,例如旋转二滚动二穿梭和输送等;通常由复合材料制成,例如硅基材料二聚合物以及合金等,尺寸范围为微米级至纳米级;形状多样,包括线状二球状以及管状等三本文将按驱动机制对微电机进行分类,总结 微电机的研究现状并展望其发展前景,为微电机的进一步发展提供借鉴三1 微电机类型1.1 磁驱动微纳米电机磁驱动微电机的动力是由电流产生的磁场或者磁性材料提供的三与其他推动机制相比,磁驱动具有良好的生物相容性和对细胞无损的能量传输机制,是微纳米电机最具前途的驱动方法之一三因为微电机的运动是通过外部磁场控制的,故不需要任何燃料,并且具有输出力大,输入阻抗低,驱动电压小等特点三电磁式微电机通常由电导体或线圈系统,软磁或硬磁材料以及绝缘和嵌入电介质组成,目 前已知的磁性材料主要包括铁二钴二镍及其合金等三 与其他材料相比,金属镍是微纳米电机制造中应用最为广泛的,镍可以通过微电铸二蒸发镀或者磁控溅射的方式获得三微电机的运动取决于磁力的大小和方向,总体结构尺寸通常在几厘米的范围内,而执行结构在微米范围内三电磁式微电机按照运动输出的形式可分为线性微电机和旋转微电机三2007年,德国布伦瑞克工业大学研制出第一代集成可变磁阻线性微电机,由定子极和移动极两部分组成,如图1所示三其磁通量是由缠绕在定子磁极 周围的三维线圈在平面内产生的,移动梳形磁极在定 子磁极之间,其两侧被电磁力吸引,移动极产生直线运动[2]三该微电机由紫外光刻二电铸和注塑技术制造
微型电机驱动电路原理 时间:2010-10-26 10:07来源:未知作者:电路图点击:210 次 本文介绍了5种用于3V供电的微型直流电机的驱动电路,这种电机有两根引线,更换两根引线的极性,电机换向。该驱动电路要求能进行正反转和停止控制。 电路一 如下图所示,些电路是作者最初设计的电路,P1.3、P2.2和P2.4分别是51单片机的IO引脚。设计的工作原理是:当P1.3高电平、P2.2和P2.4都为低电平时,电机正转。此时,Q1和Q4导通,Q2和Q3截止,电流注向为+5VàR1àQ1àMàQ4;当P1.3低电平、P2.2和P2.4都为高电平时,电机反转。此时,Q2和Q3导通,Q1和Q4截止。P2.2为高电平同时P2.4为低电平时,电路全不通,电机停止。 图中电阻:R1=20Ω,R2=R3=R4=510Ω 但实际实验情况去出人意料,即电机正向和反向都不转。经测量,当P1.3高电平,P2.2和P2.4都为低电平时,Q4导通,但Q1不导通,P1.3的电平只有0.67V左右,这样Q1无法导通。 经分析原因如下:51的P1、P2、P3各引脚都是内部经电阻上拉,对地接MOSFET 管,所谓高电平,是MOSFET截止,引脚上拉电阻拉为高电平。若此内部上拉电阻很大,比如20K,则当上图电路接上后,则流过Q1的b极的电流最大为 (5-0.7)/20mA=0.22mA,难以动Q1导通。所以此电路不通。 总结:51单片机的引脚上拉能力弱,不足以驱动三极管导通。 电路二 如下图所示:这个电路中四个三极管都采用PNP型,这样,导通的驱动是控制引脚输出低电平,而51的低电平时,是通过MOSFET接地,所以下拉能力极强。 但此电路的Q1和Q3需要分别控制,所需控制引脚较多。如果要用一个IO 脚控制则可以加一个反相器。但此电路的Q1和Q3需要分别控制,所需控制引脚较多。如果要用一个IO脚控制则可以加一个反相器。如图3所示。图中标有各
2014单片机课程设计 单片机课程设计报告 题目微型直流电机控制系统设计专业班级 学号 实现形式Proteus 姓名 分数 指导老师 学院名称电气信息学院
目录 1 绪论 (1) 1.1 课题背景 (1) 1.2 课题要求 (1) 2 方案论证 (2) 2.1 系统组成 (2) 2.2 单片机选型 (2) 2.3 驱动方案论证 (2) 2.4 监测方案论证 (4) 2.5 人机接口方案 (5) 3 硬件设计 (5) 3.1 单片机最小系统设计 (5) 3.2 I/O分配 (6) 3.3 驱动电路设计 (7) 3.4 转速检测电路设计 (8) 3.5 人机接口电路设计 (9) 4 软件设计 (10) 4.1 主程序流程 (10) 4.2 按键扫描子程序流程 (11) 5 问题与分析 (12) 5.1 设计问题 (12) 5.2 答辩问题 (13) 参考文献 (14) 附录一(原理图) (15) 附录二(程序清单) (16) 附录三(器件清单) (18)
1 绪论 现代工业生产中,电动机是主要的驱动设备,目前在直流电动机拖动系统中已大量采用晶闸管(即可控硅)装置向电动机供电的KZ—D拖动系统,取代了笨重的发电动一电动机的F—D系统,又伴随着电子技术的高度发展,促使直流电机调速逐步从模拟化向数字化转变,特别是单片机技术的应用,使直流电机调速技术又进入到一个新的阶段,智能化、高可靠性已成为它发展的趋势。 直流电机调速基本原理是比较简单的(相对于交流电机),只要改变电机的电压就可以改变转速了。改变电压的方法很多,最常见的一种PWM脉宽调制,调节电机的输入占空比就可以控制电机的平均电压,控制转速。 1.1课题背景 直流电动机具有良好的起动、制动性能,宜于在大范围内平滑调速,在许多需要调速或快速正反向的电力拖动领域中得到了广泛的应用。从控制的角度来看,直流调速还是交流拖动系统的基础。早期直流电动机的控制均以模拟电路为基础,采用运算放大器、非线性集成电路以及少量的数字电路组成,控制系统的硬件部分非常复杂,功能单一,而且系统非常不灵活、调试困难,阻碍了直流电动机控制技术的发展和应用范围的推广。随着单片机技术的日新月异,使得许多控制功能及算法可以采用软件技术来完成,为直流电动机的控制提供了更大的灵活性,并使系统能达到更高的性能。采用单片机构成控制系统,可以节约人力资源和降低系统成本,从而有效的提高工作效率。 传统的控制系统采用模拟元件,虽在一定程度上满足了生产要求,但是因为元件容易老化和在使用中易受外界干扰影响,并且线路复杂、通用性差,控制效果受到器件性能、温度等因素的影响,故系统的运行可靠性及准确性得不到保证,甚至出现事故。 目前,直流电动机调速系统数字化已经走向实用化,伴随着电子技术的高度发展,促使直流电机调速逐步从模拟化向数字化转变,特别是单片机技术的应用,使直流电机调速技术又进入到一个新的阶段,智能化、高可靠性已成为它发展的趋势。
行业概述 目录 一.微特电机行业总体状况 (1) 二.超小型微特电机行业发展情况 (2) 三.微特电机的行业供需情况 (3) 四.行业主要的竞争企业 (4) 四.行业进入壁垒 (8) 五.行业上下游发展状况对本行业的影响 (8) 六.影响行业发展的不利因素 (10) 一.微特电机行业总体状况 微特电机是工业自动化、办公自动化、家庭自动化、武器装备自动化必不可少的关键基础机电组件,广泛应用于汽车、家用电器、电动车、音像、通信、计算机、日用化妆品、机器人、航天工业、工业机械、军事及自动化等领域。 微特电机是技术密集行业,其兴起于瑞士,发展于日本,而后随技术扩散逐步向发展中国家转移,并带动这些国家微特电机行业的发展。目前,日本、国等发达国家拥有微特电机行业的先进技术,其国除从事部分高端微特电机生产外,大部分制造能力已向发展中国家转移。以中国为代表的发展中国家承接日本、国等发达国家的产业转移,目前已成为世界微特电机的主要生产国和出口国。2007年全球微特电机产量约90亿台,中国生产各类微特电机产量约54亿台,约占世界总产量的60%(资料来源:《2008年微特电机行业形势和发展展望》,施进浩,2008年) 国微特电机行业(除军用微特电机外)是对外完全开放和市场竞争较充分的行业。基于以下两个方面的优势,自20世纪90年代开始,中国微特电机产业加速发展:一是国经济的发展形成了对微特电机的巨大市场需求,大量的民营企业凭借灵活的机制和市场开拓能力投资微特电机产业;二是中国拥有丰富的磁性材料资源、廉价的劳动力,以及低廉的生产要素价格,吸引了众多的国际微特电机制造企业向中国转移生产。 目前,中国已成为世界上最大的微特电机的生产国和出口国。2007年,我国有一定生产规模的企业近700家(含各类微特电机生产企业),销售收入达到504.30亿元,与2006年相比增加约26%(资料来源:《2008年微特电机行业形势和发展展望》,施进浩,2008年)。与国制造能力迅速增加相对应,国出口规模也迅速增长,最近几年出口额及增长情况如下表所示:
几种微型电机驱动电路实验和分析 以下所述电路用于3V供电的微型直流电机的驱动,这种电机有两根引线,更换两根引线的极性,电机换向。该驱动电路要求能进行正反转和停止控制。 电路一 如下图所示,些电路是作者最初设计的电路,P1.3、P2.2和P2.4分别是51单片机的IO引脚。设计的工作原理是:当P1.3高电平、P2.2和P2.4都为低电平时,电机正转。此时,Q1和Q4导通,Q2和Q3截止,电流注向为+5VàR1àQ1àMàQ4;当P1.3低电平、P2.2和P2.4都为高电平时,电机反转。此时,Q2和Q3导通,Q1和Q4截止。P2.2为高电平同时P2.4为低电平时,电路全不通,电机停止。 图中电阻:R1=20Ω,R2=R3=R4=510Ω 但实际实验情况去出人意料,即电机正向和反向都不转。经测量,当P1.3高电平,P2.2和P2.4都为低电平时,Q4导通,但Q1不导通,P1.3的电平只有0.67V左右,这样Q1无法导通。 经分析原因如下:51的P1、P2、P3各引脚都是内部经电阻上拉,对地接MOSFET管,所谓高电平,是MOSFET截止,引脚上拉电阻拉为高电平。若此内部上拉电阻很大,比如20K,则当上图电路接上后,则流过Q1的b极的电流最大为(5-0.7)/20mA=0.22mA,难以动Q1导通。所以此电路不通。 总结:51单片机的引脚上拉能力弱,不足以驱动三极管导通。 电路二 如下图所示:这个电路中四个三极管都采用PNP型,这样,导通的驱动是控制引脚输出低电平,而51的低电平时,是通过MOSFET接地,所以下拉能力极强。 但此电路的Q1和Q3需要分别控制,所需控制引脚较多。如果要用一个IO脚控制则可以加一个反相器。但此电路的Q1和Q3需要分别控制,所需控制引脚较多。如果要用一个IO脚控制则可以加一个反相器。如图3所示。图中标有各点实测电压值。
小型直流电机输出扭矩的控制 摘要:本文介绍了小型直流电动机输出力矩的方法。 关键词:直流电动机力矩输出 一、概述 我们知道直流电动机电枢中的电流与其轴上的机械负载成正比,即负载加大,电动机电枢中的电流随之加大,当电枢中的电流增大到一定值时,若不加以限制,电枢就有被烧毁的危险。 下图是笔者设计的针对小型直流电动机(20W左右)的一种输出扭矩控制(过载保护)电路。电路有如下功能: 1、电机的最大输出扭矩可调。 2、当电机的最大输出扭矩超过设定值时,自动停机,并有红色发光二极管闪烁报警。 二、工作原理 11
22 3 2 1 8 4 U1A LM393 T 9014 D1IN4007 SB1LD1GREEN R12K 三位半数显电流表 M R322K R45.1K KA1 KA2 R21 KA1 Vin 1 G N D 2 Vout 3U278L12 R515K R62K B KA1 KM1 SB2LAMP KM1 R8180K R9470K R10180K TRIG 2 Q 3R 4 CVolt 5 THR 6 DIS 7 V C C 8 G N D 1 U3 555 EC247μKM1 R112K D3RED KM1+24V KA2 KA3 KA2 R7 6.8K 开关电源 AC220V DC24V TRIG 2 Q 3R 4 CVolt 5 THR 6 DIS 7 V C C 8 G N D 1 U4 555 R12200K EC34.7μR136.8K T29014D21N4007EC14.7μ KA3 Vin 1 G N D 2 Vout 3 U578L12 EC447μ
微机原理及应用课程设计说明书设计题目:微型直流电机调速系统设计
目录 一、系统功能要求分析 (1)
二、方案设计及其说明 (2) 三、原理线路设计 (3) 1.原理线路 2.工作原理说明 3.操作时序分析 4.特点说明 四、程序设计 (4) 1.程序结构及流程 2.程序算法分析 3.关键程序段说明 4.源程序清单 五、系统调试及结论 (5) 1.调试方法 2.重点问题及解决方法 3.运行结果及结论 六、设计体会 (6) 参考文献 (7) 一、系统功能要求分析
此设计要求利用实验装置,设计一个直流电机控制系统的原理线路,编制应用程序,实现直流电机转速控制的功能,并且进一步可增加转速测量的功能。系统功能具体要求及分析如下: (1)开始运行,电机停止:未按任何键之前,设定初值,使经DA0832转换后的电流为零,电机不转。 (2)按档调速功能:直流电机可有三个转速,分为一、二、三档,其中按下按键“一”电机在低速档运行;按下按键“二”电机在中速档运行;按下按键“三”电机在高速档运行。 (3)连续调速功能:按下“加速”键,编程控制DA0832输入数字量累加,直流电机可在原速基础上升速;按下“减速”键,编程控制DA0832输入数字量自减,直流电机可相对原速减速。 (4)停止功能:设有停止键,控制电机的停止运行。调节电位器改变DA0832的基准电压,使得初值00H对应的输出电流为0,从而电机停止运行。(5)改变转向功能:原理上,调节DAC0832的基准电压,使得某一中间值对应转速为零,则在输入数字量大于此值时为正电压,电机正转;再输入数字量小于此值时为负电压,电极反转。 (6)测速功能:在一定时间内对霍尔元件产生的脉冲数计数,从而求得电机转速,并在数码管显示。 二、方案设计及其说明 (一)硬件设计 在硬件上,所用到的芯片主要有:CPU8086、并行通信接口芯片8255A、可编程定时计数芯片8253、可编程中断控制器8259A、以及键盘扫描显示芯片8279。 (1)电机转速的控制:电机转速大小的控制可以通过改变加于电机两端的电压来实现,选用DAC0832芯片实现数字量到模拟量的转化,设置电机转速给定值,不同的数字量对应输出不同的电流,再通过一个高输入阻抗的线性运算放大器LM324得到相应的模拟电压信号,从而控制电机转速。 (2)按键状态的检测及显示:设K1、K2、K3为一、二、三档,K4为停止键,
目录 第1章.微型电机原理的简单介绍 (2) 1.1、微型电机的种类 (2) 1.2、微型电机的结构 (2) 1.2.1、电磁式 (1) 1.2.2、组合式 (1) 1.2.3、非电磁式 (1) 1.3、控制用微电机特性参数 (1) 1.3.1、工作特性 (1) 1.3.2、灵敏度 (1) 1.3.3、精度 (3) 1.3.4、阻抗或电阻 (3) 1.3.5、可靠性 (3) 1.4、微型电机的应用领域 (3) 1.5、微型电机行业特点 (2) 1.6、我国微型电机行业回顾 (2) 1.7、我国微型电机行业现状 (2) 1.8、国际微型电机市场现状 (4) 1.9、我国微型电机行业的未来 (3) 第二章.模拟电路和数字电路设计概念 (5) 2.1模拟电路: (5) 2.2、数字电路: (5) 2.3、模拟电路和数字电路的区别 (5) 第三章.基本电路制作之元件简介和特点以及作用 (6) 3.1、NE555 (6) 3.2、NE555的特性 (6) 第四章、电机的调试 (9) 4.1、注意事项 (9) 第五章、实验体会与感想 (9)
第1章.微型电机原理的简单介绍 微型电机-small and special electrical machine 体积、容量较小,输出功率一般在数百瓦以下的电机和用途、性能及环境条件要求特殊的电机。全称微型特种电机,简微型电机-韩国第一品牌-SPG称微电机。常用于控制系统中,实现机电信号或能量的检测、解算、放大、执行或转换等功能,或用于传动机械负载,也可作为设备的交、直流电源。 1.1、微型电机的种类 微特电机门类繁多,大体可分为直流电动机、交流电动机、自态角电机、步进电动机、旋转变压器、轴角编码器、交直流两用电动机、测速发电机、感应同步器、直线电机、压电电动机、电机机组、其他特种电机等13大类。 1.2、微型电机的结构 微特电机在结构上大体可分为3类: 1.2.1、电磁式 基本组成与普通电机相似,包括定子、转子、电枢绕组、电刷等部件,但结构格外紧凑。 1.2.2、组合式 常见的有两种:上述各种微电机的组合;微电机与电子线路的组合。例如直流电动机与传感器的组合,X方向与Y方向直线电动机的组合等。 1.2.3、非电磁式 外形结构与电磁式一样,如旋转类产品作成圆柱形,直线类产品作成方形,但内部结构因其工作原理不同而差别很大。 1.3、控制用微电机特性参数 各类微特电机的性能差别很大,其性能参数难以统一阐明。一般说来,用于驱动机械的侧重于运行及起动时的力能指微型电机-韩国SPG微型电机标;作电源用的要考虑输出功率、波形和稳定性;控制用微电机则偏重于静态和动态的特性参数。前两类电机的特性参数与普通电机相似。 唯控制用微电机有其独特的特性参数。 1.3.1、工作特性 常用输出量与输入量,或一个输出量与另一个输出量之间的关系来表示。从控制要求来说,静态特性曲线应连续、光滑,没有突变;动态特性常用频率曲线或响应曲线来表示。频率曲线应平稳,无突跳振荡点;响应曲线应快速收敛。 1.3.2、灵敏度 对应于单位输入信号的输出量的大小。一般常用比力矩、比电动势、放大系数等表示。
辽宁工业大学 单片机原理及接口技术课程设计(论文)题目:小型直流电机控制器的设计 院(系):电气工程学院 专业班级: xxxxxxxxxxx 学号: xxxxxxxxxx 学生姓名: xxxxxxx 指导教师:(签字) 起止时间:2016.6.6-2016.6.17
课程设计(论文)任务及评语 院(系):电气工程学院 教研室:自动化 注:成绩:平时20% 论文质量60% 答辩20% 以百分制计算 学 号 学生姓名 专业班级 课程设计(论文)题目 小型直流电机控制器的设计 课 程设计(论文)任务 课题完成的功能、设计任务及要求、技术参数 实现功能 小型直流电机控制器可以通过按键设置参数,实现电机的启动、加速、减速、急停、 恒速等功能。硬件设计包括CPU 选型、最小系统电路、电机驱动电路、按键电路、显示。 设计任务及要求 1、确定设计方案,画出方案框图。 2、进行硬件电路的设计,包括元器件选择,绘制原理图。 3、进行实物的制作。 4、绘出程序流程图,并编写完整程序。 5、要求认真独立完成所规定的全部内容;所设计的内容要求正确、合理。 6、按学校规定的格式,撰写、打印设计说明书一份;设计说明书应在4000字以上。 技术参数 1、电机参数:5~12V 可选,工作电流500mA 以下; 进 度计划 1、布置任务,查阅资料,确定系统设计方案(2天) 2、系统硬件设计及实物制作(3天) 3、系统软件设计及编写功能程序及调试(3天) 4、撰写、打印设计说明书(1天) 5、验收及答辩。(1天) 指导教师评语及成绩 平时: 论文质量: 答辩: 总成绩: 指导教师签字: 年 月 日
几种微型电机驱动电路分析 时间:2006-10-20 来源: 作者: 点击:557 字体大小:【大中小】 以下所述电路用于3V供电的微型直流电机的驱动, 这种电机有两根引线,更换两根引线的极性,电机换向。该驱动电路要求能进行正反转和停止控制。 电路一: 如下图所示,这电路是作者最初设计的电路,P1.3、P2.2和P2.4分别是51单片机的IO引脚。设计的工作原理是:当P1.3高电平、P2.2和P2.4都为低电平时,电机正转。此时,Q1和Q4导通,Q2和Q3截止,电流注向为+5VàR1àQ1àMàQ4;当P1.3低电平、P2.2和P2.4都为高电平时,电机反转。此时,Q2和Q3导通,Q1和Q4截止。P2.2为高电平同时P2.4为低电平时,电路全不通,电机停止。 图中电阻:R1=20Ω,R2=R3=R4=510Ω
图1 但实际实验情况去出人意料,即电机正向和反向都不转。经测量,当P1.3高电平,P2.2和P2.4都为低电平时,Q4导通,但Q1不导通,P1.3的电平只有0.67V左右,这样Q1无法导通。 经分析原因如下:51的P1、P2、P3各引脚都是内部经电阻上拉,对地接MOSFET管,所谓高电平,是MOSFET截止,引脚上拉电阻拉为高电平。若此内部上拉电阻很大,比如20K,则当上图电路接上后,则流过Q1的b极的电流最大为 (5-0.7)/20mA=0.22mA,难以动Q1导通。所以此电路不通。 总结:51单片机的引脚上拉能力弱,不足以驱动三极管导通。 电路二:
如下图所示:这个电路中四个三极管都采用PNP型,这样,导通的驱动是控制引脚输出低电平,而51的低电平时,是通过MOSFET接地,所以下拉能力极强。 但此电路的Q1和Q3需要分别控制,所需控制引脚较多。如果要用一个IO脚控制则可以加一个反相器。但此电路的Q1和Q3需要分别控制,所需控制引脚较多。如果要用一个IO 脚控制则可以加一个反相器。如图3所示。图中标有各点实测电压值。 图2
微型电机在汽车电子领域的应用 学号:030940811 姓名:刘超键 当今社会,科学技术的发展日新月异。特别是工业领域,“信息化”,“智能化”,“小型化”等要求越来越强烈。随着社会的不断不进步,对能源的消耗也越来越多,能源短缺已经成为了一个世界性的问题,而这又对工业设备提出了“节能”的要求。于是,整个领域就朝向“自动化”,“节能化”,“信息化”不断发展。 电机对于科技迅速发展和社会日益进步起了很大的作用。众所周知,发电机将其他形式的能量转变成电能,供给工业消耗和日常生活的使用。而电动机则是利用电能在广大的领域发挥着独特的作用。很难想象,这个世界没有电机将会是什么样子。没有电机,就没有电力,就没有第二次科技革命,肯定就没有现在的科技的发展。 电机推动科学技术的发展,而科学技术又反作用于电机的发展。微型电机的问世,正是这种作用下的结果。运用新型材料特制的微型电机具有高性能、噪音小、微型化、轻量化、高精度、高性能等优点。微型电机占用体积小,重量轻,在航空航天领域,机器人领域,特种控制领域等等,都用这广泛的应用。 不仅仅是在这些高科技领域中有微型电机的身影,在民用领域,如汽车电子领域中,微型电机也能发挥很大的作用。 汽车在社会生活中有着举足轻重的地位。汽车的设计需要人性化、节能化;随着能源危机的加重,汽车的发展也趋向于节能、智能化发展。现在的汽车,有的安装了两套动力系统。一套内燃机式,一套电力式。安装电力电动装置有很多好处:首先,它可以减少对化石能源的消耗,减少温室气体的排放;其次,它还可以提高能量的利用率。当汽车下坡时,使电机工作在发电机状态,发出电能并将其储存,在这个过程上,还能降低汽车速度,减少刹车片的磨损,这相比于其他相同条件下的动力汽车,明显使车内的人员更加安全。当然,这是较大型的电机在汽车领域发挥的作用。 当发生交通事故的时候,驾驶员存活下来的概率通常要比其他乘客更低一些,
New Scale是美国专业超小型运动制造商,创造出了世界上最小的直线电机-SQUIGLE 超声波压电陶瓷电机以及TRACKER (TM)定位传感器。 超声波压电式电机的产品特点: 1.超微型尺寸 2.低能耗,低电压驱动 3.具有断电位置保护功能 4.驱动力:>5N 5.行程可达50mm 6.速度从1um/s到10mm可调 7.精度最高20nm 8.无磁性,有真空型和低温型产品 New Scalede TRACKER (TM)定位传感器世界上尺寸最小、分辨率最高的定位传感器,内部整合了一个磁感探测器及op-chip位置编码器。 产品特点:1.最小的体积:芯片尺寸:3.9*2.5mm 2.精密的非接触感应:0.5um精度,<2um重复度 3.传感器和编码器集成在一个封装中 4.直接数字输出(I2C总线),不需要脉冲计数器 5.对光、粒子、震动不敏感,没有安装限制 6.绝对一流的性能:零基准,自动增益,自动偏置 一.SQL-RV-1.8 SQUIGGLE 降压直线驱动系统 特点: 1.小, 2.8 x 2.8 x 6 mm, 高性能电机 提高45% 速度 减少40% 功耗 推力几乎是SQL-1.8 电机的 2 倍 亚微米的定位精度 2.工业上最小的压电驱动方案 比同类产品小 5 倍 1.8 x 1.8 mm 驱动IC 3.工业上第一个 2.3V 直流供电的直接IC 输出 智能专用控制IC 无需升压
应用:电池供电的手持设备 手机摄像头 数码相机和数码摄像机 微型医疗制动器 机器人,无人机和安防 运动稳定系统 微型光学模块 微型电子锁 精密工业和科研仪器 世界上最小的线性电控系统 SQUIGGLE 降压微型电机和NSD2101驱动ASIC(专用集成电路)组合在一起成为世界上最小的直线压电运动控制系统,性能可与更大的系统相媲美。最先进的多层压 电技术,结合先进的智能集成电路设计和正在申请专利的控制算法,创造了具有无 与伦比性能的直线运动控制系统。 新RV系列具有专利技术的超声波压电电机和驱动器,创造了多个行业第一, 包括: 1.2.3V直流电池输入驱动芯片,无需外加升压电路。 2.比电机还要小得多的完整驱动方案,比同类系统小5倍 3.比同类电磁解决方案减少40%的功耗。 SQL-RV-1.8-6-12 SQUIGGLE 电机规格 无与伦比的尺寸和性能 SQL-RV-1.8和NSD2101驱动在一定范围的电压条件下提供大范围的性能。下面的图表示NSD-2101 IC不同输入电压条件下,电机的推力和速度性能;不同电压下达到一系列直线运动速 度的功耗。功率曲线是在对电机施加15g轴向负载时产生的。
---------------------------------------------------------------最新资料推荐------------------------------------------------------ 微电机基础知识一 微电机常识直流微电机基础知识(一)编写:Bingo 1/ 26
z 直流微电机基础知识(一) -----微电机常识z 直流微电机基础知识(二) -----微电机运转原理z 直流微电机基础知识(三)-----ST/BH装配工艺流程z 直流微电机基础知识(四) -----RO装配工艺流程z 直流微电机基础知识(五) -----总装及测试工艺流程
---------------------------------------------------------------最新资料推荐------------------------------------------------------ ★ 什么是微电机?z 微型电机是体积小、重量轻、能满足多种使用要求的小功率电机(目前达真生产的微电机一般在几十瓦以下)。 全称微型特种电机(也叫微特电机),简称微电机。 z 微电机也称电机(俗称马达),在电路中用字母“M” 表示。 它的主要作用是产生驱动力矩,作为用电器或小型机械的动力源。 3/ 26
★ 什么是微电机?z 电动机是一种把电能转换为机械能的装置。 z 多数电动机是利用磁场的同极相斥,异极相吸以及电生磁的原理完成电能和机械能的转换。 电能输入电磁转换机械能输出
---------------------------------------------------------------最新资料推荐------------------------------------------------------ ★ 微型电机的分类◆ 按工作电源分类可分为直流电动机和交流电动机。 ◆ 直流电动机按结构及工作原理可分为无刷直流电动机和有刷直流电动机。 ◆ 有刷直流电动机可分为永磁直流电动机和励磁直流电动机。 ◆ 永磁直流电动机又分为稀土永磁直流电动机、铁氧体永磁直流电动机和铝镍钴永磁直流电动机。 5/ 26