第一章嵌入式系统概述
一、举出 3 个课本中未提到的嵌入式系统的例子。(红绿灯控制、数字空调、机顶盒)
二、什么是嵌入式系统?特点是?答:嵌入式系统是嵌入到对象体系中的专用计算机应用系统。英国电机工程师协会定义:嵌入式系统为控制、检测或辅助某个设备、机器或工厂运作的装置。(1)以技术角度定义:以应用为中心、以计算机技术为基础、软件硬件可裁剪、适应应用系统对功能、可靠性、成本、体积、功耗严格要求的专用计算机系统。
(2)从系统角度的定义:嵌入式系统是设计完成复杂功能的硬件和软件,并使其紧密耦合在一起的计算机系统。术语嵌入式反映了这些系统通常是大系统中的一个完整的部分,称为嵌入的系统。嵌入的系统中可以共存多个嵌入式系统。
特点:1、嵌入式系统通常应用在为特定用户设计的系统中,具有功耗低、体积小、集成度高等特点。将通用CPU中由板卡完成的任务集成在了嵌入式CPU内部。
2、嵌入式系统是将先进的计算机技术、半导体技术和电子技术于各个行业的具体应用相结合的产物。所以是技术密集、资金密集、高度分散、不断创新的知识集成系统。
3、嵌入式系统的硬件和软件都必须高效率地设计,量体裁衣,去除冗余。
4、为了提高执行速度和系统可靠性,嵌入式系统中的软件一般都固化在存储器芯片或处理器芯片中,而不是存储于磁盘等载体中。由于嵌入式系统必须有较高的时实性,因此对程序的质量,特别是可靠性有较高的要求。
5、嵌入式系统本身不具备自举开发能力,必须有一套专用的开发工具和环境才能进行开发。
三、什么叫嵌入式处理器?嵌入式处理器分为哪几类?答:嵌入式处理器是嵌入式系统的核心,是控制、辅助系统运行的硬件单元,与普通台式计算机的微处理器相比,其工作稳定性更高,功耗较小,对环境(如温度、湿度、电磁场、震动等)的适应能力更强,体积更小,且集成的功能较多。
嵌入式处理器从应用角度,可以大致分为以下几类:
1. 注重嵌入式处理器的尺寸、能耗和价格。应用于新型电子娱乐等不注重计算的设备;
2. 注重嵌入式处理器的性能。应用于路由器等高速计算密集型的设备;
3. 注重嵌入式处理器的性能、尺寸、能耗和价格。应用于各种工业控制设备;
按照结构分类:嵌入式微处理器(EMPU;嵌入式微控制器(MCU;嵌入式DSP处理器(DSP);
嵌入式片上系统(SOC)。嵌入式系统的分类也是以上答案(P5)。
四、什么是嵌入式操作系统?为何要使用嵌入式操作系统?答:操作系统是计算机中最基本的程序。操作系统负责计算机系统中全部软硬资源的分配与回收、控制与协调等并发的活动;操作系统提供用户接口,使用户获得良好的工作环境;操作系统为用户扩展新的系统功能提供软件平台。
使用嵌入式操作系统原因之一就是因为其具有实时性。使用嵌入式实时操作系统具有以下优点:
1. 嵌入式实时操作系统提高了系统的可靠性。
2. 嵌入式实时操作系统提高了开发效率,缩短了开发周期。
3. 嵌入式实时操作系统充分发挥了32位CPU勺多任务潜力。
第二章ARM7体系结构
一、基础知识
(1)ARM7TDM中的T、D M I 的含义是什么? ( P19)
答:T后缀:高密度16位Thumb旨令集扩展。 D 后缀:支持片上调试。
M后缀:64位乘法指令。I 后缀:Embedded ICE硬件仿真功能模块。
(2)ARM7TDM采用几级流水线?( P20)使用何种存储器编址方式?
答:采用三级流水线,三个阶段分别为:取指、译码、执行。使用了冯?诺依曼结构,指
令和数据共用一条32位总线。
(3)ARMi理器模式和ARM处理器状态有何区别? ( P24~P26
答:处理器模式指的是处理器在执行程序时,在不同时刻所处的不同状态。处理器状态指的是处理器当前所执行的指令集。
(4)分别列举ARM勺处理器模式和状态。
答:处理器模式:7种,:用户模式(usr)和特权模式,特权模式包括系统模式(sys)和异常模式,异常模式包括:管理模式(svc)、中止模式(abt)、未定义模式(und)、中断模式(irq)、快速中断模式(fiq)。
处理器状态:ARM犬态为32位,这种状态下执行的是字方式ARM旨令,具有最完整的功能,处理器在系统上电时默认为ARM犬态。
Thumb状态为16位,这种状态下执行半字方式的Thumb指令。
(5)PC和LR分别使用哪个寄存器?( P31~P32
答:程序计数器(PC使用R15寄存器,链接寄存器(LR)使用R14寄存器。
(6)R13寄存器的通用功能是什么? ( P29~P30
答:ARM处理器通常将寄存器R13作为堆栈指针(SP),用于保存堆栈的出入口处地址。
(7 ) CPSR寄存器中哪些位用来定义处理器状态?
答:程序状态寄存器CPSR,
(8)描述一下如何禁止IRQ和FIQ的中断?(P38)
答:当控制位I置位时,IRQ中断被禁止,否则允许IRQ中断使能;
当控制位F置位时,FIQ中断被禁止,否则允许FIQ中断使能。
二、存储器格式
定义假设使用存储指令将R0的值存放在0x4000单元中。如果存储器格式为大端格式,请写出在执行加载指令将存储器0x4000单元的内容取出存放到R2寄存器操作后所得R2的值。如果存储器格式改为小端模式,所得R2值又为多少?低地址0x4000单元的字节内容分别是多少?( P49)
三、处理器异常
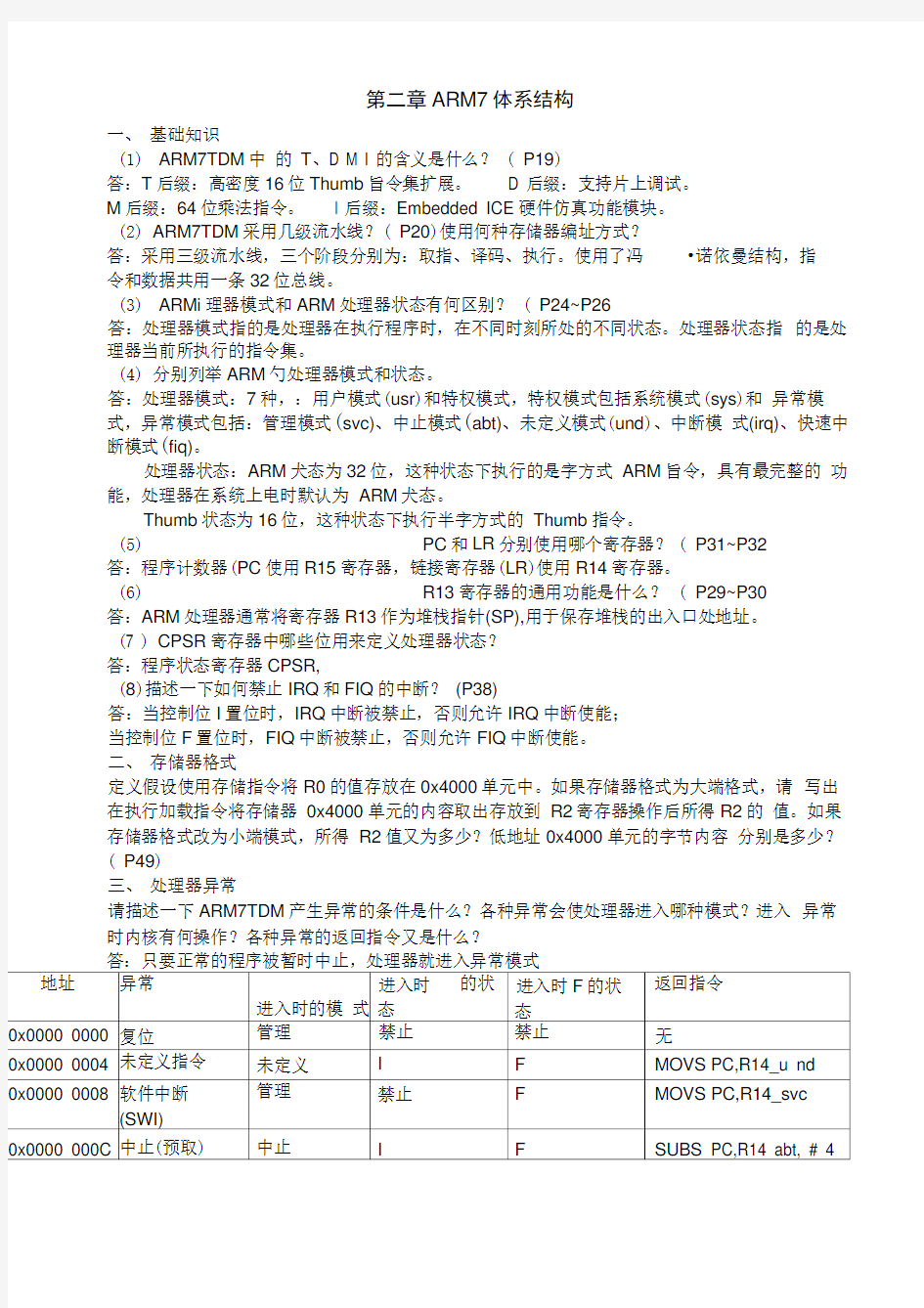
请描述一下ARM7TDM产生异常的条件是什么?各种异常会使处理器进入哪种模式?进入异常时内核有何操作?各种异常的返回指令又是什么?
答:只要正常的程序被暂时中止,处理器就进入异常模式
第三章ARM7TDMI(-S 指令系统
一、基础知识
(1) ARM7TDMI(-S 有几种寻址方式 (P53) ?“ LDR R1,[R0, #0x08] ”属于哪种寻址方 式? 答:共有8种寻址方式:寄存器寻址、立即寻址、寄存器移位寻址、寄存器间接寻址、基 址寻址、多寄存器寻址、堆栈寻址、相对寻址。
LDR R1,[R0, #0x08]属于基址寻址,意思是读取 R0+0x08地址上的存储单元的内容,存 入R1。
(2) ARM 旨令的条件码有多少个(P60)?默认条件码是什么?
答:有 16个,EQ NE CS/HS CC/LO MI 、PL VS VC HI 、LS GE LT 、GT LE 、AL NV,默认条件码是AL 。
(3) ARM 指令中第2个操作数有哪几种形式(P58)?列举5个8位图立即数。
答:有3种形式:immed_8 常数表达式。Rm —寄存器方式。Rm,shift ------------------- 寄存器移 位方式。
5 个 8 位图立即数:0x3FC(0xFF<<2)、0、0xF0000000(0xF0<<24)、200(0xC8)、
0xF0000001(0x1F<<28)。
(4) LDR/STR 指令的偏移形式有哪4种(P62)? LDRB 旨令和LDRSB 旨令有何区别? 答:LDR/STR 指令的偏移形式有4种,分别是:零偏移、前索引偏移、程序相对偏移、后索
引偏移。LDRB 旨令是加载无符号字节数据,LDRSB 旨令则是加载有符号字节数据。LDRE 就 是读出指定地址的数据并存入指定寄存器,LDRSE 读出指定地址的数据,高24位符号位用 于扩展,再存入指定寄存器。
(5) 请指出MOV 旨令与LDR 加载指令的区别及用途。
答:MOV 指令的源操作数是常数或(带偏移量的)寄存器,用于寄存器之间的数据传送; LDR 指令的源操作数是地址,用于存储器到寄存器的数据传送。
(6) CMP f 令是如何执行的?写一程序,判断R1的值是否大于0x30,是则将R1减去0x30。 (P71)
答: CMP 指令将寄存器Rn 的值减去operand2的值,根据操作的结果更新CPSR 中的相应 条 件标志位,以便后面的指令根据相应的条件标志来判断是否执行。 CM P W 令不保存运算 结果,在进行两个数据的大小判断时,常用 CMP f 令及相应的条码来操作。
程序:CMP {cond} Rn, opera nd2
CMP R1,#0x30 LDRLE PC SUB R1 (7) 调用子程序是用 答:BL 指令用于子程序调用。
(8) 请指出LDF 伪指令的用法。(P61)指令格式与LDR 加载指令的区别是什么?
答:LDR 指令用于从内存中读取数据放入寄存器或者用于加载 32位的立即数,还常用于加 载芯片外围功能部件的寄存器地址,指令格式与 LDR 加载指令的区别在于第二个数为地址 表达式,伪指令的LDR 的参数有“二”号。
(9) ARM 犬态与Thumb 犬态的切换指令是什么?请举例说明。
;将R1与常数0x30比较
,LR ;如果小于或等于0x30,则程序返回
,R1, #0x30 ;大于0x30,则将R1减去0x30,结果存回R1
B 指令还是用BL 指令?请写出返回子程序的指令。(P73)
MOV PC, LR 或者 BX LR
答:切换指令是BX指令。BX指令跳转到Rmj f定的地址去执行程序。若Rm的bitO为1, 则跳转时自动将CPSF中的标志T置位,即把目标地址的代码解释为Thumb弋码;若Rm的bitO为0,则跳转时自动将CPSF中的标志T复位,即把目标地址的代码解释为ARM弋码。
(10)Thumb状态与ARM犬态寄存器有区别吗(P28 P34 P35 P81)? Thumb指令对哪些寄存器的访问受到一定限制?
答:Thumb状态与ARM犬态的寄存器有区别:1、由于Thumb指令集不包含MSR和MRS旨令,如果用户需要修改CPSR勺任何标志位,必须回到ARM模式。通过BX和BLX指令来改变指令集模式,而且当完成复位(Reset )或者进入到异常模式时,将会被自动切换到ARM模式。2、访问R8-R15的Thumb数据处理指令不能更新CPSR中的ALU状态标志。(Thumb指令集较ARM旨令集有如下限制:只有B指令可以条件执行,其它指令都不能条件执行;分支指令的跳转范围有更多限制;数据处理指令的操作结果必须放入其中一个;单寄存器访问指令,只能操作R0?R7; LDM和STM旨令可以对R旷R7的任何子集进行操作;) Thumb旨令对R8-
R15寄存器访问受限。
(11)Thumb指令集的堆栈入栈、出栈指令是哪两条?( P83)
入栈指令PUSH出栈指令POP
(12)Thumb指令集的BL指令转移范围为何能达到-4MB?其指令编码是怎样的?(P85) Thumb采用两条16位指令组合成22位半字偏移(符号扩展为32位),使指令转移范围为±
4MB BL label 。L2PG4,POlabel
2. 有符号和无符号加法
下面给出A和B的值,可以先手动计算A+B并预测N、Z、V和C标志位的值。然后修改程序清单3.1中RO R1的值,将这两个值装载到这两个寄存器中(使用LDR伪指令,如“LDR R0,=0xFFFF0000 ),使其执行两个寄存器的加法操作。调试程序,每执行一次加法操作就将标志位的状态记录下来,并将所得结果与预先计算得出的结果相比较。如果两个操作数看作有符号数,如何解释所得标志位的状态?同样,如果把两个操作数看作是无符号数,所得标志位又当如何理解?
(1) 0xFFFF000F (A)
+0x0000FFF1 (B)
0x00000000 NZCV=0110
如果两个操作数是有符号的,A是负数,B是正数,和是0,没有溢出,所以V=0b如果两个操作数是无符号数,和是0,有进位,所以C=1。
(2) 0x7FFFFFFF (A)
+0x02345678 (B)
如果两个操作数是有符号数,A是正数,B是正数,和是负数,有溢出,所以V=1。如果两个操作数是无符号数,没有进位,所以C=0
(3)
0x0568F421 NZCV=0000
如果两个操作数是有符号数,A是正数,B是正数,和是正数,没有溢出,所以V=0如果两个操作数是无符号数,没有进位,所以C=0
第四章LPC2000系列ARM!件结构
一、基础知识
1、LPC2114可使用的外部晶振频率范围是多少(P115)(提示使用/不使用PLL功能时
(P116))?
答:晶振频率范围:1?30 MHz若使用PLL或ISP功能时,输入时钟的频率不超过:10?
25MHz。
2、请描述LPC2210/2220的P0.14 P1.20、P1.26、BOOT和BOOT(引脚在芯片复位时分别有什么作用?(P95, P96, P119并简单说明LPC2000系列ARM7微控制器的复位处理流程。答:P0.14 为低电平时,强制片内引导装载程序复位后控制器件的操作, 即进入ISP 状态。
P1.20当RESET为低电平,使P1.25?P1.16 复位后用作跟踪端口。
P1.26当RESET为低电平,使P1.31?P1.26 复位后用作一个调试端口。
当RESET为低时,BOOT0与BOOT1一同控制引导和内部操作。弓I脚的内部上拉确保了引
脚未连接时呈现高电平。
外部复位输入:当该引脚为低电平时,器件复位,I/O 口和外围功能进入默认状态,处理器从地址0 开始执行程序。复位信号是具有迟滞作用的TTL 电平。
3、LPC2000系列ARM7微控制器对向量表有何要求(提示向量表中的保留字)?答:向量表所有数据32 位累加和为零(0x00000000?0x0000001C 的8 个字的机器码累加),才能脱机运行用户程序,这是LPC2114/2124/2212/2214 的特性。
4、如何启动LPC2000系列ARM微控制器的ISP功能?(P122)相关电路应该如何设计?答:有两种情况可以使芯片进入ISP 状态:(1)将芯片的P0.14 引脚拉低后,复位芯片,可以进入ISP 状态;(2)在芯片内部无有效用户代码时,Boot Block 自动进入ISP 状态。
5、LPC2000系列ARM7微控制器片内Flash是多位宽度的接口?(P145)它是通过哪个功能模块来提高Flash 的访问速度?
答:128位宽度接口,通过存储器加速模块(MAM来提高Flash的访问速度。
6、若LPC2210/2220的bank0存储块使用32位总线,访问bank0时,地址线A1、A0是否有效?EMC模块中的BLSO- BLS4具有什么功能?(P159)
答:无效,(如果存储器组配置成16 位宽, 则不需要A0;8 位宽的存储器组需要使用
A0 。);字节定位选择信号。
7、LPC2000系列ARM7微控制器具有引脚功能复用特性,那么如何设置某个引脚为指定功能?(P172)
答:通过引脚功能选择寄存器的设定来设置某个引脚为指定功能。
& FIQ、IRQ有什么不同?向量IRQ和非向量IRQ有什么不同?(P189)
答:FIQ 为快速中断,具有最高优先级,中断响应最快,常用于处理非常重要、非常紧急的事件,IRQ为普通中断。向量IRQ具有中等优先级,对外部事件响应比较及时,常用于处理重要事件。非向量IRQ优先级最低,中断延迟时间比较长,常用于处理一般事件中断。
9、在使能、禁止FIQ和IRQ时,为什么操作SPSF寄存器而不操作CPSR寄存器?(P75,P189,P200)
答:在用户模式下,无法修改CPSR只有在特权模式下修改SPSR后,通过退出特权模式,
然后恢复SPSF到CPSR才能实现修改CPSR
10、ARM内核对FIQ、向量IRQ和非向量IRQ有什么不同?(P200)
FIQ优先级最高,中断响应最迅速。一旦发生FIQ中断,ARM处理器进入FIQ模式,而且ARM 处理器为FIQ模式多设计了R8?R12这5个私有寄存器,加速FIQ的处理;向量IRQ 具有中等优先级,处理中断比较迅速;非IRQ中断优先级最低。
11、向量中断能嵌套吗?请结合ARM体系结构进行阐述。答:能,但需要重新开中断。
12、VIC的软件中断和ARM内核的软件中断一样吗?(P 188)
ARM内核本身只有快速中断FIQ和普通中断IRQ这2条中断输入信号线,只能接受2个中断。如果处理 2 个以上的中断事件,就需要借助向量中断控制器(VIC)。
13、设置引脚为GPIO功能时,如何控制某个引脚单独输入/输出?(P181)当前要知道某
个引脚当前的输出状态时,是读取IOPIN寄存器还是读取IOSET寄存器?
答:通过GPIO方向寄存器来控制引脚单独输入/输出。比如某引脚作输出时,将IODIR寄存器的相应位设置为1。当前要知道某个引脚当前的输出状态时,读取IOPIN 寄存器,因为IOSET 寄存器控制引脚输出咼电平。
2
14、P0.2和P0.3 口是I C接口,当设置它们为GPIO时,是否需要外接上拉电阻才能输出
高电平?(P183)
答:需要外接上拉电阻。
15、写出至少3种GPIO的应用实例。(P183-187)
1、将P0.0设置为输出高电平。
2、使用GPIO控制蜂鸣器。
3、读取P0.0引脚的电平状态。
4、读取按键状态。
5、在多个I/O 口线上输出数据。
15、使用SPI主模式时,SSEL引脚是否可以作为GPIO (P238)若不能,SSEL引脚应如何
处理?
答:不能,SSEL引脚应接上拉电阻。
16、LPC2114的2 个UART符合什么标准?(P276)哪一个UART可用作ISP 通信?
(P278 哪一个UAR■具有Moden接口?
答:符合16C550工业标准。UART(可用作ISP通信,UART具有Moden接口。
17、介绍I 2C和SPI总线的特点,并分别介绍几款基于这两种总线的芯片。(P238, P250)答:|2C BUS(Inter IC BUC )是NXP半导体公司推出的芯片间串行传输总线,它以2根
2 连线实现了完善的双向数据传送,可以极为方便地构成多机系统和外围器件扩展系统。I 2 C 总线采用了器件地址的硬件设置方法,通过软件寻址完全避免了器件的片选线寻址方法。
2
从而使硬件系统具有最简单而灵活的扩展方法。基于I C的芯片有FM24CL04和ZLG7290等。
SPI总线(串行外设接口)总线系统是一种全双工同步串行外设接口,允许MCU与各种外围设备以串行方式进行通信、数据交换。一个SPI总线可以连接多个主机和多个从机,但是在同一时刻只允许有一个主机操作总线。基于SPI总线的芯片有ISD4003语音芯片和电
能计量芯片ATT7022等等。
18、LPC2114具有几个32位定时器?(P222) PWM1时器是否可以作通用定时器使用?
(没讲)
答:有2个32位定时器,分别是定时器0和定时器1。PWME时器不能用作通用定时器使用。
19、LPC2000系列ARM微控制器具有哪两种低耗模式?如何降低系统的功耗?
(P89,P141)答:2个低功耗模式:空闲模式和掉电模式;可以通过个别使能/禁止外部功能来优化功耗。
2?计算PLL设置值
假设有一个基于LPC2114的系统,所使用的晶振为11.0592MHZ石英晶振。请计算出最大的系统时钟(CCLK频率为多少MHZ此时PLL的M值和P值各为多少?请列出计算公式,并编写设置PLL的程序段。
解:LPC2214最大的系统时钟频率是60MHz Fcclk = M*Fosc=60MHZ
Fosc = 11.0592MHz所以M=5
Fcclk = Fosc*M=55.296MHz
又156MHz P=Fcco/(Fcclk*2) 当Fcco 取156MHZ寸,P=1.3 当个Fcco 取最高频率时即320 时,P=2.67 所以P=2 程序清单: Uint8 PLLSet(uint32 Fcclk,uint32 Fosc,uint32 Fcco) { Uint8 i; Uint32 plldat; i = (Fcco/Fcclk); switch(i) { case 2: plldat=((Fcclk/Fosc)-1)|(0<<5); break; case 4: plldat=((Fcclk/Fosc)-1)|(1<<5); break; case 8: plldat=((Fcclk/Fosc)-1)|(2<<5); break; case 16: plldat=((Fcclk/Fosc)-1)|(3<<5); break; default: return(FALSE); break; } PLLCON = 1; PLLCFG = plldat; PLLFEED = 0xaa; PLLFEED = 0x55; while((PLLSTAT & (1<<10)) == 0); PLLCON = 3; PLLFEED = 0xaa; PLLFEED = 0x55; return(TRUE); 3、存储器重影射: (1)LPC2210/2220具有(D )种存储映射模式。(P106, P139) (A)3 (B)5 (C)1 (D)4 (2)当程序已固化到片内Flash,向量表保存在0x00000000起始处,则MAP〔1:0丨的值应 该为( B )。(P138-P139) (A)00 (B)01 (C)10 (D)11 (3)LPC2000系列APM7微控制器存储器重映射的目标起始地址为( 0x00000000 ),共 有(16 )个字。 (A)0x00000000 ,8 (B) 习题1 1. 嵌入式系统的概念的是什么?答:嵌入式系统是以应用为中心,以计算机技 术为基础,软、硬件可裁剪,适应应用系统对功能、可靠性、成本、体积、功耗等严格要求的专用计算机系统。(嵌入式系统是嵌入式到对象体系中的,用于执行独立功能的专用计算机系统。) 2. 嵌入式系统的特点是什么? 答:系统内核小;专用性强;运行环境差异大;可靠性要求高;系统精简和高实时性操作系统;具有固化在非易失性存储器中的代码嵌入式系统开发和工作环境 4. 嵌入式系统的功能是什么?答:提供强大的网络服务小型化,低成本,低 功能;人性化的人机界面;完善的开发平台 5. 嵌入式系统的硬件平台由哪些部分组成?答:嵌入式系统的硬件是以嵌入式处理器为核心,由存储器I/O 单元电路,通信模块,外部设备必要的辅助接口组成的。 7. 嵌入式操作系统的主要特点是什么?答:体积小;实时性;特殊的开发调试环境。 8. 叙述嵌入式系统的分类。答:按嵌入式微处理器的位数分类可以分为4 位、 8 位、16 位、32 位和64 位等;按软件实时性需求分类可以分为非实时系统(如PDA), 软实时系统(如消费类产品)和硬实时系统(如工业实时控制系统)按嵌入式系统的复杂程度分类可以分为小型嵌入式系统,中型嵌入式系统和复杂嵌入式系统。 习题2 处理器和工作状态有哪些? 答:ARM犬态:此时处理器执行32位的的字对齐的ARS旨令。 Thumb犬态:此时处理器执行16位的,半字对齐的Thumb旨令 2.叙述ARM9内部寄存器结构,并分别说明R13 R14 R15寄存器的 作用。 答:共有37个内部寄存器,被分为若干个组(BANK,这些寄存器包括31个通用寄存器,包括程序计数器(PC指针)6个状态寄存器。R13用作堆栈指针,R14称为子程序链接寄存器,R15用作程序计数器。处理器的工作模式有哪些? 答:用户模式:ARM处理器正常的程序执行状态。 快速中断模式:用于高速数据传输或通道处理 外部中断模式:用于通用中断处理管理模式:操作系统使用的保护模式数据访问终止模式:当数据或指令预期终止时进入该模式,可用于虚拟存储器及存储保护 系统模式:运行具有特权的操作系统任务 未定义指令终止模式:当未定义的指令执行时进入该模式,可用 于支持硬件协处理器的软件仿真。 微处理器支持的数据类型有哪些? 答:ARM微处理器中支持字节(8位)、半字(16位),字(32 位) 嵌入式复习思考题及答案(1) 一、简答题 1、ARM9有哪几种工作模式?其中哪几种属于特权模式?哪几种属于几种异常模式? 答:有用户、系统、管理、中止、未定义、普通中断、快速中断。系统、管理、中止、未定义、普通中断、快速中断属于特权模式。管理、中止、未定义、普通中断、快速中断属于几种异常模式。 2、ARM9有哪2种工作状态?各自特点?实现状态切换指令的是什么? 答:ARM状态与Thumb状态。ARM状态指令是32位;Thumb状态指令是16位。切换指令是BX。 3、简述ARM9在不同工作模式下寄存器分布情况(用图表说明)。R13、R1 4、R15的固定用途;CPRS和SPRS名称及功能。 答:R13常作为堆栈指针SP、R14作为链接寄存器LR、R15作为程序计数器PC。CPRS是当前程序状态寄存器,包含条件代码、中断禁止位、当前处理器模式以及其他状态和控制信息。SPRS是程序状态保存寄存器,异常出现时用于保存CPRS的状态。 4 5 答:响应过程:1、将引起异常指令的下一条指令的地址保存到新的异常工作模式的R14中; 2、将CPSR的内容保存到将要执行的异常中断对应的SPSR中; 3、根据异常类型CPSR中的运行模式位; 4、将相应的矢量地址赋值给PC,开始执行异常处理程序。还可设中断禁止位。 返回过程: 1、将连接寄存器LR的值减去相应的偏移量后送到PC中; 2、将SPSR内容送回CPSR; 3、若在进入异常处理时设置了中断禁止位,要在此清除。 6、写出ARM9支持的寻址方式,各举一例。 答:略 7、写出指令LDRB/LDRH/LDR的区别。 答:LDRB将内存单元一个字节的数据扩展到32位装载到寄存器; LDRH将内存单元半字(两个字节)的数据扩展到32位装载到寄存器; LDR 将内存单元一个字的数据装载到寄存器。 8、写出LDM、STM指令用于数据块拷贝时对应的4种后缀以及用于堆栈操作对应的4种后缀。 解释各自的执行过程。 答:数据块拷贝后缀:IA操作后指针增;DA操作后指针减; IB操作前指针增;DB操作前指针减。 堆栈操作后缀:FD满递减;ED空递减;FA满递增;EA空递增。 9、ARM和Thumb两种状态下各自堆栈的生成方式有何不同?写出各自对应的入栈、出栈指令。答:ARM堆栈有4种生成方式满递增、满递减、空递增、空递减; 入栈指令:STM(FD\ED\FA\EA 4种后缀之一)出栈指令:LDM(FD\ED\FA\EA 4种后缀之一)Thumb堆栈采用满递减的生成方式。入栈指令:PUSH . 出栈指令:POP 10、写出条件代码NE、EQ的判断条件。 答:NE Z=0 (不相等);EQ Z=1 (相等) 11、B、BL及BX指令有何区别?写出无嵌套的子程序调用及返回指令。 答:B是简单的转移指令,实现向目的地址的简单的跳转; 第一章 1.简述嵌入式的定义 以应用为中心、以计算机技术为基础,软件硬件可裁剪,适应应用系统对功能、可靠性、成本、体积、功耗严格要求的专用计算机系统。 2.举例说明嵌入式系统的“嵌入性”、“专用性”、“计算机系统”的基本特征。 按照嵌入式系统的定义,嵌入式系统有3个基本特点,即“嵌入性”、“专用性”与“计算机”。 “嵌入性”由早期微型机时代的嵌入式计算机应用而来,专指计算机嵌入到对象体系中,实现对象体系的智能控制。当嵌入式系统变成一个独立应用产品时,可将嵌入性理解为内部嵌有微处理器或计算机。 “计算机”是对象系统智能化控制的根本保证。随着单片机向MCU、SoC发展,片内计算机外围电路、接口电路、控制单元日益增多,“专用计算机系统”演变成为“内含微处理器”的现代电子系统。与传统的电子系统相比较,现代电子系统由于内含微处理器,能实现对象系统的计算机智能化控制能力。 “专用性”是指在满足对象控制要求及环境要求下的软硬件裁剪性。嵌入式系统的软、硬件配置必须依据嵌入对象 的要求,设计成专用的嵌入式应用系统。 3. 简述嵌入式系统发展各阶段的特点。 (1)无操作系统阶段:使用简便、价格低廉;(2)简单操作系统阶段:初步具有了一定的兼容性和扩展性,内核精巧且效率高,大大缩短了开发周期,提高了开发效率。 (3)实时操作系统阶段:系统能够运行在各种不同类型的微处理器上,具备了文件和目录管理、设备管理、多任务、网络、图形用户界面Graphic User Interface,GUI)等功能,并提供了大量的应用程序接口Application Programming Interface,API),从而使应用软件的开发变得更加简单。(4)面向Internet阶段:进入21世纪,Internet技术与信息家电、工业控制技术等的结合日益紧密,嵌入式技术与Internet技术的结合正在推动着嵌入式系统的飞速发展 4.简述嵌入式系统的发展趋势。 (1)新的微处理器层出不穷,精简系统内核,优化关键算法,降低功耗和软硬件成本。(2)Linux、Windows CE、Palm OS等嵌入式操作系统迅速发展。(3)嵌入式系统的开发成了一项系统工程,开发厂商不仅要提供嵌入式软硬件系统本身,同时还要提供强大的硬件开发工具和软件支持包。 3-3 什么是补偿法测量?试述其特点 特点:补偿法的测量精度不会很高,这是因为电位器RP 虽然可以做到很准确,但是工作电流必须通过指示仪表来测量,因此要提高测量精度必须校正工作电流I 。 3-4直流电位差计的工作原理 直流电位差计是用比较测量电势或电压的一种仪器。比较的方法是采用补偿法。经常采用的电位差计的电路,包括三个回路: (1)工作电流回路 (2)标准回路 (3)测量回路 首先是调定工作电流。将S 合在n 边,调节电位器RP 1(R n 不动),使检流计读数为零。标准电阻R n 上的电压降与标准电池的电势E n 相互补偿,即有: n n E I R =;n n R E I = (1) 在I确定后,RP 1不改变,将S 合向x 边,移动RP 3至R h 处,再一次使检流计指针指零,于是有: I R E X h = (2) 联立(1)(2)可得 n n h x E R R E = 由于I R E n =n /是定值,所以x E 与h R 成正比,即h R 可直接按电压读出。 4-2 5-3能否用压电传感器测量变化缓慢的应力信号?试说明理由。 答:不能。压电传感器输出的信号非常的弱,必须将电信号进行放大才能检测出来。常用的放大器有两种:电压放大器,又称阻抗变换器,主要作用是把电压器件的高输出阻抗变换为传感器的低输出阻抗,并保持输出电压与输入电压成正比。这种放大器的放大倍数随频率下降而下降,所以不能测量静态物理量。另一种为电荷放大器,实际是一个具有深度电容负反馈的运算放大器,下限截至频率低于0.000003Hz,可对准静态的物理量进行有效的测量。如果压力变化比较慢,可选用带电荷放大器的压电式传感器。 6-1试用典型环节分析图6-5所示的加速度传感器的结构 第2章ARM技术与ARM体系结构 1.简述ARM处理器内核调试结构原理 答:ARM处理器一般都带有嵌入式追踪宏单元ETM(Embedded Trace Macro),它是ARM 公司自己推出的调试工具。ARM处理器都支持基于JTAG(Joint Test Action Group 联合测试行动小组)的调试方法。它利用芯片内部的Embedded ICE来控制ARM内核操作,可完成单步调试和断点调试等操作。当CPU处理单步执行完毕或到达断点处时,就可以在宿主机端查看处理器现场数据,但是它不能在CPU运行过程中对实时数据进行仿真。 ETM解决了上述问题,能够在CPU运行过程中实时扫描处理器的现场信息,并数据送往TAP(Test Access Port)控制器。上图中分为三条扫描链(图中的粗实线),分别用来监视ARM核,ETM,嵌入式ICE的状态。 1.分析ARM7TDMI-S各字母所代表的含义。 答:ARM7 T D M I – S 中 ARM是Advanced RISC Machines的缩写 7是系列号; T:支持高密度16位的Thumb指令集; D:支持JTAG片上调试; M:支持用于长乘法操作(64位结果)ARM指令,包含快速乘法器;; I:带有嵌入式追踪宏单元ETM,用来设置断点和观察点的调试硬件; S:可综合版本,意味着处理器内核是以源代码形式提供的。这种源代码形式又可以编译成一种易于EDA工具使用的形式。 2.ARM处理器的工作模式有哪几种,其中哪些为特权模式,哪些为异常模式,并指出处 理器在什么情况下进入相应的模式。 答:ARM技术的设计者将ARM处理器在应用中可能产生的状态进行了分类,并针对同一类型的异常状态设定了一个固定的入口点,当异常产生时,程序会自动跳转到对应异常入口处进行异常服务。 ?1.用户模式:非特权模式,也就是正常程序执行的模式,大部分任务在这种模式下 执行。在用户模式下,如果没异常发生,不允许应用程序自行改变处理器的工作模式,如果有异常发生,处理器不会自动切换工作模式 ?2.FIQ模式:也称为快速中断模式,支持高速数据传输和通道处理,当一个高优先 嵌入式习题答案Last revision on 21 December 2020 第一章习题答案 1.什么是嵌入式系统请列举几个常见的嵌入式系统。 答:根据国际电气和电子工程师协会(IEEE)的定义,嵌入式系统是控制、监视或者辅助设备、机器和生产线运行的装置(Devices used to control, monitor, or assist the operation of equipment, machinery or plants)。这主要是从产品的应用角度加以定义的,由此可以看出嵌入式系统是软件和硬件的综合体,可以涵盖机械等附属装置。 目前被我国科学家普遍认同的定义是:嵌入式系统是以应用为中心,以计算机技术为基础,软硬件可裁减,对功能、可靠性、成本、体积、功耗要求严格的专用计算机系统。 常见的嵌入式系统:手机,DVD,路由器,核磁共振仪,全自动洗衣机。 2.嵌入式系统与通用计算机有哪些区别 答:(1) 以应用为中心;(2) 以计算机技术为基础(3) 软件和硬件可裁减(4) 对系统性能要求严格(5)软件的固件化(6)需要专用的开发工具 3.嵌入式系统的发展分为哪几个阶段 答:第一阶段:无操作系统的嵌入算法阶段。第二阶段:以嵌入式CPU为基础,以简单操作系统为核心的嵌入式系统。第三阶段:以嵌入式操作系统为标志的嵌入式系统。第四阶段:以基于Internet为标志的嵌入式系统。 4.请列举嵌入式系统的主要应用领域。 答:(1)工业控制领域(2)交通运输领域(3)消费电子产品(4)家电领域(5)通信领域(6)商业和金融领域(7)环境监测领域(8)医疗领域(9)建筑领域(10)军事国防领域(11)航天航空领域 1.1简述测量仪器的组成与各组成部分的作用 答:感受件、中间件和效用件。感受件直接与被测对象发生联系,感知被测参数的变化,同时对外界发出相应的信号;中间件将传感器的输出信号经处理后传给效用件,放大、变换、运算;效用件的功能是将被测信号显示出来。 1.2测量仪器的主要性能指标及各项指标的含义是什么 答:精确度、恒定度、灵敏度、灵敏度阻滞、指示滞后时间等。精确度表示测量结果与真值一致的程度;恒定度为仪器多次重复测量时,指示值的稳定程度;灵敏度以仪器指针的线位移或角位移与引起这些位移的被测量的变化值之间的比例表示;灵敏度阻滞又称感量,是足以引起仪器指针从静止到做微小移动的被测量的变化值;指示滞后时间为从被测参数发生改变到仪器指示出该变化值所需时间,或称时滞。 2.3试述常用的一、二阶测量仪器的传递函数及它的实例 答:一阶测量仪器如热电偶;二阶测量仪器如测振仪。 2.4试述测量系统的动态响应的含义、研究方法及评价指标。 答:测量系统的动态响应是用来评价系统正确传递和显示输入信号的指标。研究方法是对系统输入简单的瞬变信号研究动态特性或输入不同频率的正弦信号研究频率响应。评价指标为时间常数τ(一阶)、稳定时间t s和最大过冲量A d(二阶)等。 2.6试说明二阶测量系统通常取阻尼比ξ=0.6~0.8范围的原因 答:二阶测量系统在ξ=0.6~0.8时可使系统具有较好的稳定性,而且此时提高系统的固有频率ωn会使响应速率变得更快。 3.1测量误差有哪几类?各类误差的主要特点是什么? 答:系统误差、随机误差和过失误差。系统误差是规律性的,影响程度由确定的因素引起的,在测量结果中可以被修正;随机误差是由许多未知的或微小因素综合影响的结果,出现与否和影响程度难以确定,无法在测量中加以控制和排除,但随着测量次数的增加,其算术平均值逐渐接近零;过失误差是一种显然与事实不符的误差。 3.2试述系统误差产生的原因及消除方法 答:仪器误差,安装误差,环境误差,方法误差,操作误差(人为误差),动态误差。消除方法:交换抵消法,替代消除法,预检法等。 3.3随机误差正态分布曲线有何特点? 答:单峰性、对称性、有限性、抵偿性。 4.1什么是电阻式传感器?它主要分成哪几种? 答:电阻式传感器将物理量的变化转换为敏感元件电阻值的变化,再经相应电路处理之后转换为电信号输出。分为金属应变式、半导体压阻式、电位计式、气敏式、湿敏式。 4.2用应变片进行测量时为什么要进行温度补偿?常用的温度补偿方法有哪几种? 答:在实际使用中,除了应变会导致应变片电阻变化之外,温度变化也会使应变片电阻发生误差,故需要采取温度补偿措施消除由于温度变化引起的误差。常用的温度补偿方法有桥路补偿和应变片自补偿两种。 4.4什么是电感式传感器?简述电感式传感器的工作原理 答:电感式传感器建立在电磁感应的基础上,是利用线圈自感或互感的变化,把被测物理量转换为线圈电感量变化的传感器。 4.5什么是电容式传感器?它的变换原理如何 答:电容式传感器是把物理量转换为电容量变化的传感器,对于电容器,改变ε ,d和A都会 r 影响到电容量C,电容式传感器根据这一定律变换信号。 4.8说明磁电传感器的基本工作原理,它有哪几种结构形式?在使用中各用于测量什么物理量? 第1章嵌入式系统概述 1,什么是嵌入式系统嵌入式系统的特点是什么 嵌入式系统概念: (1) IEEE对嵌入式系统的定义:用于控制,监视或者辅助操作机器和设备的装置. (2)一般定义:以应用为中心,以计算机技术为基础,并且软硬件可裁剪,适用于应用系统对功能,可靠性,成本,体积,功耗有严格要求的专用计算机系统. 嵌入式系统的特点: (1) 专用的计算机系统 (2) 必须满足环境要求 (3) 必须能满足对象系统的控制要求 (4) 是集成计算机技术与各行业应用的集成系统 (5) 具有较长的生命周期 (6) 软件固化在非易失性存储器中 (7) 必须能满足实时性要求 (8) 需要专用开发环境和开发工具 2,简单分析几种嵌入式操作系统的主要特点,包括嵌入式Linux,Windows CE,uCOS II 及VxWorks. (1)嵌入式Linux:有多个主流版本,根据应用需求,性能略有差别.μCLinux是Linux小型化后,适合于没有MMU的微处理器芯片而裁剪成的操作系统,μCLinux保持了传统Linux操作系统的主要特性,包括稳定,强大的网络和文件系统的支持,μCLinux裁剪了大量的Linux内核以缩小尺寸,适合像512KB RAM,1MB Flash这样小容量,低成本的嵌入式系统.RT_Linux即能兼容通常的Linux,又能保证强实时性. (2)Windows CE:开发平台主要为WinCE Platform Builder,有时也用EVC环境开发一些较上层的应用.WinCE开发难度远低于嵌入式Linux,实时性略低,常用于手机,PDA等手持设备中. (3)uCOS II:结构小巧,抢先式的实时嵌入式操作系统,具有执行效率高,占用空间小,可移植性强,实时性能好和可扩展性能等优点.主要用于小型嵌入式系统. (4) VxWorks: 集成开发环境为Tornado,Vxworks因出现稍早,实时性很强,并且内核可极微(最小8K),可靠性较高等.通常应用在通信设备等实时性要求较高的系统中. 第2章嵌入式处理器体系结构 1,具体说明ARM7TDMI的含义,其中的T,D,M,I分别代表什么 ARM7TDMI是ARM7处理器系列成员之一,采用V4T版本指令.T表示Thumb,该内核可从16位指令集切换到32位ARM指令集;D表示Debug,该内核中放置了用于调试的结构,支持片内Debug调试;M表示Multiplier,支持位乘法;I表示Embedded ICE ,内含嵌入式ICE宏单元,支持片上断点和观察点. 2,ARMV4及以上版本的CPSR的哪一位反映了处理器的状态若CPSR=0x000000090,分析系统状态.CPSR=0x000000090表示当前处理器工作于ARM状态,系统处于用户模式下. CPSR的BIT5(T)反映当前处理器工作于ARM状态或Thumb状态. 3,ARM有哪几个异常类型,为什么FIQ的服务程序地址要位于0x1C 在复位后,ARM处理器处于何种模式,何种状态 ARM的7种异常类型:复位RESET异常,未定义的指令UND异常,软件中断SWI异常,指令预取中止PABT异常,数据访问中止DABT异常,外部中断请求IRQ异常,快速中断请求FIQ 异常.在有快速中断发生时,CPU从0x1C处取出指令执行.ARM复位后处于管理模式,工作于ARM状态. 4,为什么要使用Thumb模式,与ARM代码相比较,Thumb代码的两大优势是什么 9.3.1 a) void closestMatchPC() { EXEC SQL BEGIN DECLARE SECTION; char manf[], SQLSTATE[6]; int targetPrice, float tempSpeed, speedOfClosest; char tempModel[4], modelOfClosest[4]; int tempPrice, priceOfClosest; EXEC SQL END DECLARE SECTION; EXEC SQL DECLARE pcCursor CURSOR FOR SELECT model, price, speed FROM PC; EXEC SQL OPEN pcCursor; EXEC SQL FETCH FROM pcCursor INTO :modelOfClosest, :priceOfClosest, :speedOfClosest; if(NOT_FOUND) /* print message and exit */ ; while(1) { EXEC SQL FETCH pcCursor INTO :tempModel, :tempPrice, :tempSpeed; if (NOT_FOUND) break; if(|tempPrice-targetPrice|<|priceOfClosest-targetPrice|) { modelOfClosest = tempModel; priceOfClosest = tempPrice; speedOfClosest = tempSpeed; } } EXEC SQL SELECT maker INTO :manf FROM Product WHERE model = :modelOfClosest; printf("manf=%s, model=%d, speed=%d\n", manf, modelOfClosest, speedOfClosest); EXEC SQL CLOSE CURSOR pcCursor; } 第1章嵌入式系统概述 (1)举出3个本书中未提到的嵌入式系统的例子。 答:键盘、鼠标、扫描仪。 (2)什么叫嵌入式系统? 答:嵌入到对象体系中的专用计算机应用系统。 (3)什么叫嵌入式处理器?嵌入式处理器分为哪几类? 答:嵌入式处理器是为完成特殊的应用而设计的特殊目的的处理器。分为3类:1.注重尺寸、能耗和价格;2.关注性能;3.关注全部4个需求——性能、尺寸、能耗和价格。 (4)什么是嵌入式操作系统?为何要使用嵌入式操作系统? 答:嵌入式操作系统是操作系统的一种类型,是在传统操作系统的基础上加入符合嵌入式系统要求的元素发展而来的。原因:1.提高了系统的可靠性;2.提高了开发效率,缩短了开发周期。3.充分发挥了32位CPU的多任务潜力。 第2章ARM7体系结构 1.基础知识 (1)ARM7TDMI中的T、D、M、I的含义是什么? 答:T:高密度16位Thumb指令集扩展;D:支持片上调试;M:64位乘法指令;I:Embedded ICE硬件仿真功能模块。 (2)ARM7TDMI采用几级流水线?使用何种存储器编址方式? 答:3级;冯·诺依曼结构。 (3)ARM处理器模式和ARM处理器状态有何区别? 答:ARM处理器模式体现在不同寄存器的使用上;ARM处理器状态体现在不同指令的使用上。 (4)分别列举ARM的处理器模式和状态? 答:ARM的处理器模式:用户模式、系统模式、管理模式、中止模式、未定义模式、中断模式、快速模式;ARM的处理器状态:ARM状态、Thumb状态。 (5)PC和LR分别使用哪个寄存器? 答:PC:R15;LR:R14。 (6)R13寄存器的通用功能是什么? 答:堆栈指针SP。 (7)CPSR寄存器中哪些位用来定义处理器状态? 第一章检测技术的基本知识思考题答案 l.检测系统由哪几部分组成? 说明各部分的作用。 答:一个完整的检测系统或检测装置通常是由传感器、测量电路和显示记录装置等几部分组成,分别完成信息获取、转换、显示和处理等功能。当然其中还包括电源和传输通道等不可缺少的部分。下图给出了检测系统的组成框图。 检测系统的组成框图 传感器是把被测量转换成电学量的装置,显然,传感器是检测系统与被测对象直接发生联系的部件,是检测系统最重要的环节,检测系统获取信息的质量往往是由传感器的性能确定的,因为检测系统的其它环节无法添加新的检测信息并且不易消除传感器所引入的误差。 测量电路的作用是将传感器的输出信号转换成易于测量的电压或电流信号。通常传感器输出信号是微弱的,就需要由测量电路加以放大,以满足显示记录装置的要求。根据需要测量电路还能进行阻抗匹配、微分、积分、线性化补偿等信号处理工作。 显示记录装置是检测人员和检测系统联系的主要环节,主要作用是使人们了解被测量的大小或变化的过程。 2.传感器的型号有几部分组成,各部分有何意义? 依次为主称(传感器)被测量—转换原理—序号 主称——传感器,代号C; 被测量——用一个或两个汉语拼音的第一个大写字母标记。见附录表2; 转换原理——用一个或两个汉语拼音的第一个大写字母标记。见附录表3; 序号——用一个阿拉伯数字标记,厂家自定,用来表征产品设计特性、性能参数、产品系列等。若产品性能参数不变,仅在局部有改动或变动时,其序号可在原序号后面顺序地加注大写字母A、B、C等,(其中I、Q不用)。 例:应变式位移传感器: C WY-YB-20;光纤压力传感器:C Y-GQ-2。 3.测量稳压电源输出电压随负载变化的情况时,应当采用何种测量方法? 如何进行? 答:测定稳压电源输出电压随负载电阻变化的情况时,最好采用微差式测量。此时输出电压认可表示为U0,U0=U+△U,其中△U是负载电阻变化所引起的输出电压变化量,相对U来讲为一小量。如果采用偏差法测量,仪表必须有较大量程以满足U0的要求,因此对△U,这个小量造成的U0的变化就很难测准。测量原理如下图所示: 图中使用了高灵敏度电压表——毫伏表和电位差计,R r和E分别表示稳压电源的阻和电动势,凡表示稳压电源的负载,E1、R1和R w表示电位差计的参数。在测量前调整R1使电位差计工作电流I1为标准值。然后,使稳压电源负载电阻R1为额定值。调整RP的活动触点,使毫伏表指示为零,这相当于事先用零位式测量出额定输出电压U。正式测量开始后,只需增加或减小负载电阻R L的值,负载变动所引起的稳压电源输出电压U0的微小波动值ΔU,即可由毫伏表指示出来。根据U0=U+ΔU,稳压电源输出电压在各种负载下的值都可以准确地测量 a r m嵌入式系统课后习题 部分答案 The pony was revised in January 2021 一填空题嵌入式系统从大的方面分为(嵌入式系统硬件平台)和(嵌入式软件)两大部分。 驱动层程序一般包括(硬件抽象层HAL)、(板级支持包BSP)和(设备驱动程序)。 嵌入式系统核心是嵌入式处理器,可分为(嵌入式微处理器)、(嵌入式微控制器)、嵌入式DSP处理器和(嵌入式片上系统SoC)4大类。处理器分为(ARM)和(Thumb)两种操作状态。 状态下,SP寄存器指的是(R13)、LR寄存器指的是(R14)、PC寄存器指的是(R15). 处理器支持的数据类型中,字节为(8)位、半字为(16)位、字为(32)位。 (-S)指令集包括(ARM)指令集和(Thumb)指令集。 指令用于从(存储器)中将一个32位的字数据传送到(目的寄存器)中。 指出下面各条指令的寻址方式。 SUB R0,R1,R2 ;寻址方式:(寄存器寻址)。 SUBS R0,R0,#1 ;寻址方式:(立即寻址)。 MOV R0,R2,LSL#3 ;寻址方式:(寄存器移位寻址)。 SWP R1,R1,[R2] ;寻址方式:(寄存器间接寻址)。 LDR R2,[R3,#0x0C] ;寻址方式:(基址寻址)。 汇编语言源程序中语句一般有(指令)、(伪指令)、(伪操作)和宏指令组成。 对Flash存储器的编程可通过(JTAG仿真/调试器)、( ISP )和(IAP)3重方法来实现。 异常向量表可以来自4个不同的存储器区域,分别是(片内Flash )、(片内SRAM )、( Boot Block )和片外存储器。 系列的定时器主要用于3个方面:(对内部事件进行计数的间隔定时器)、(通过捕获输入实现脉宽解调器)、(自由运行的定时器)。二选择题 可以表示微控制器的缩略词是( B ) A. MPU B. MCU C. WDT 类存储器包括( ABD ) 思考题与习题解马西秦 第一章、思考题与习题 1、检测系统由哪几部分组成?说明各部分的作用。 答:1、检测系统由:传感器、测量电路、显示记录装置三部分组成。 2、传感器部分的作用:是把被测量变换成另一种与之有确定的对 应关系,并且便于测量 的量的装置。 测量电路部分的作用:是将传感器的输出信号转换成易于测量的电压或电流信号。 显示记录装置部分的作用:是使人们了解检测数值的大小或变化的过程。 2、非电量的电测法有哪些优点? 答:P3 3、测量稳压电源输出电压随负载变化的情况时,应当采用何种测量方法?如何进行? 答:1)、采用微差式测量; 2)、微差式测量是综合零位式测量和偏差式测量的优点而提出的一种测量方法。 基本思路是:将被测量x的大部分作用先与已知标准量N的作用相抵消,剩余部分即两者差值 Δ=x-N。这个差值再用偏差法测量。 微差式测量中:总是设法使差值Δ很小,因此可选用高灵敏度的偏差式仪表测量之。即使差值的测量精度不高,但最终结果仍可达到较高的精度。 例如:测定稳压电源输出电压随负载电阻变化的情况时,输出电压U。 可表示为U0=U+ ΔU, 其中ΔU是负载电阻变化所引起的输出电压变化量,相对U来讲为一小量。如果采用偏差法测 量,仪表必须有较大量程以满足U。的要求,因此对ΔU这个小量造成的U0的变化就很难测准。 当然,可以改用零位式测量,但最好的方法是采用如图1-3所示的微差式测量。 微差式测量: ⑴、微差式测量电路图中; ①、使用了高灵敏度电压表:毫伏表和电位差计; ②、Rr和E分别表示稳压电源的内阻和电动势; ③、RL表示稳压电源的负载; ④、E1、R1和Rw表示电位差计的参数。 ⑵、微差式测量过程 ①、在测量前调整R1,使电位差计工作电流I1为标准值。 ②、然后使稳压电压负载电阻RL为额定值,调整RP的活动触点, 使毫伏表指示为零,这相当于事先用零位式测量出额定输出电 压U。 ③、正式测量开始后,只需增加或减小负载电阻RL的值,负载变动 所引起的稳压电压输出电压U0的微小波动值ΔU即可由毫伏表 指示出来。 第一章 思考与练习 1、举出3个书本中未提到的嵌入式系统的例子。 答:红绿灯控制,数字空调,机顶盒 2、什么叫嵌入式系统 嵌入式系统:以应用为中心、以计算机技术为基础、软件硬件可裁剪、适应应用系 统对功能、可靠性、成本、体积、功耗严格要求的专用计算机系统。 3、什么叫嵌入式处理器?嵌入式处理器分为哪几类? 嵌入式处理器是为完成特殊的应用而设计的特殊目的的处理器。 嵌入式微处理器(Embedded Microprocessor Unit, EMPU) 嵌入式微控制器(Microcontroller Unit, MCU) 嵌入式DSP 处理器(Embedded Digital Signal Processor, EDSP) 嵌入式片上系统(System On Chip) 4、什么是嵌入式操作系统?为何要使用嵌入式操作系统? 是一段在嵌入式系统启动后首先执行的背景程序,首先,嵌入式实时操作系统提高了系统的可靠性。 其次,提高了开发效率,缩短了开发周期。再次,嵌入式实时操作系统充分发挥了32 位CPU 的多任务潜力。 第二章 1、嵌入式系统项目开发的生命周期分哪几个阶段?各自的具体任务是什么? 项目的生命周期一般分为识别需求、提出解决方案、执行项目和结束项目4 个阶段。 识别需求阶段的主要任务是确认需求,分析投资收益比,研究项目的可行性,分析厂商所应具备的条件。 提出解决方案阶段由各厂商向客户提交标书、介绍解决方案。 执行项目阶段细化目标,制定工作计划,协调人力和其他资源;定期监控进展, 分析项目偏差,采取必要措施以实现目标。 结束项目阶段主要包括移交工作成果,帮助客户实现商务目标;系统交接给维护人员;结清各种款项。 2、为何要进行风险分析?嵌入式项目主要有哪些方面的风险? 在一个项目中,有许多的因素会影响到项目进行,因此在项目进行的初期,在客户和开发团队都还未投入大量资源之前,风险的评估可以用来预估项目进行可能会遭遇的难题。 需求风险;时间风险;资金风险;项目管理风险 3、何谓系统规范?制定系统规范的目的是什么? 规格制定阶段的目的在于将客户的需求,由模糊的描述,转换成有意义的量化数据。 4、何谓系统规划?为何要做系统规划 系统规划就是拟定一个开发进程,使项目在合理的进程范围中逐渐建构完成。其目地是让客户可以进一步地掌握系统开发的进程,并确定检查点,以让双方确定项目是否如预期中的进度完成。 5、为什么在项目结束前需要进行项目讨论? 项目的讨论一个项目进行的反馈机制。通过这一个程序,项目团队的经验才可以被记录 下来,也就是说,这是一个撰写项目历史的过程。 第三章 1、ARM7TDMI中的T、D、M、I的含义是什么? 64 位乘法指令(带M 后缀的)、支持片上调试(带D 后缀的)、高密度16 位的Thumb 指令机扩展(带T 后缀的)和EmbededICE 观察点硬件(带I 后缀的) 2、ARM7TDMI采用几级流水线?使用何种存储器编址方式? 三级流水线(取指译码执行);使用了冯·诺依曼(V on Neumann )结构,指令和数据共用一条 32 位总线。 3、ARM处理器模式和ARM处理器状态有何区别? 处理器模式指的是处理器在执行程序时在不同时刻所处的不同状态,处理器状态指的是处理器当前所执行的指令集。 4、分别列举ARM的处理器模式和状态。 状态: ARM 状态32 位,这种状态下执行的是字方式的ARM 指令 A R M嵌入式系统课后 习题部分答案 SANY标准化小组 #QS8QHH-HHGX8Q8-GNHHJ8-HHMHGN# 一填空题 嵌入式系统从大的方面分为(嵌入式系统硬件平台)和(嵌入式软件)两大部分。 驱动层程序一般包括(硬件抽象层HAL)、(板级支持包BSP)和(设备驱动程序)。 嵌入式系统核心是嵌入式处理器,可分为(嵌入式微处理器)、(嵌入式微控制器)、嵌入式DSP处理器和(嵌入式片上系统SoC)4大类。 处理器分为(ARM)和(Thumb)两种操作状态。 状态下,SP寄存器指的是(R13)、LR寄存器指的是(R14)、PC寄存器指的是(R15). 处理器支持的数据类型中,字节为(8)位、半字为(16)位、字为(32)位。 (-S)指令集包括(ARM)指令集和(Thumb)指令集。 指令用于从(存储器)中将一个32位的字数据传送到(目的寄存器)中。指出下面各条指令的寻址方式。 SUB R0,R1,R2 ;寻址方式:(寄存器寻址)。 SUBS R0,R0,#1 ;寻址方式:(立即寻址)。 MOV R0,R2,LSL#3 ;寻址方式:(寄存器移位寻址)。 SWP R1,R1,[R2] ;寻址方式:(寄存器间接寻址)。 LDR R2,[R3,#0x0C] ;寻址方式:(基址寻址)。 汇编语言源程序中语句一般有(指令)、(伪指令)、(伪操作)和宏指令组成。 对Flash存储器的编程可通过(JTAG仿真/调试器)、( ISP )和(IAP)3重方法来实现。 异常向量表可以来自4个不同的存储器区域,分别是(片内Flash )、(片内SRAM )、( Boot Block )和片外存储器。 系列的定时器主要用于3个方面:(对内部事件进行计数的间隔定时器)、(通过捕获输入实现脉宽解调器)、(自由运行的定时器)。二选择题 可以表示微控制器的缩略词是( B ) A. MPU B. MCU C. WDT 类存储器包括( ABD ) A. NOR Flash B. EPROM C. SRAM D. PROM 不属于ARM的系列是( D ) A. MCS-96 B. 80C51 C. LPC2000 处理器系列采用( A )级流水线。 A. 3 B. 5 C. 6 D. 8 下面ARM处理器模式中属于特权模式的有( BCD ) A. 用户模式 B. 中断模式 C. 系统模式 D. 管理模式 (或STM)指令允许一条指令最多传送( C )个寄存器。 A. 4 B. 8 C. 16 D. 24 指令限制在当前指令的( B )地址范围。 第二章水和废水监测 3.对于工业废水排放源,怎样布设采样点?怎样测量污染物排放总量? (1)在车间或车间处理设施的废水排放口布设采样点,监测第一类污染物;在工厂废水总排放口布设采样点,监测第二类污染物。 (2)已有废水处理设施的工厂,在处理设施的总排放口布设采样点。如需了解废水处理效果和调控处理工艺参数提供依据,应在处理设施进水口和部分单元处理设施进、出口布设采样点。 (3)用某一时段污染物平均浓度乘以该时段废(污)水排放量即为该时段污染物的排放总量。 4.水样有哪几种保存方法?试举几个实例说明怎样根据被测物质的性质选用不同的保存方法。 (1)冷藏或冷冻方法 (2)加入化学试剂保存法 加入生物抑制剂、调节pH、加入氧化剂或还原剂 如:在测定氨氮、硝酸盐氮、化学需氧量的水样中加入HgCl2,可抑制生物的氧化还原作用;测定氰化物或挥发酚的水样中加入NaOH溶液调pH至12,使之生成稳定的酚盐。 5.水样在分析测定之前,为什么要进行预处理?预处理包括哪些内容? (1)被污染的环境水样和废(污)水样所含组分复杂,多数污染祖坟含量低,存在形态各异,共存组分的干扰等,都会影响分析测定,故需预处理。 (2)预处理包括悬浮物的去除、水样的消解、待测组分的浓缩和分离。 14.说明原子吸收光谱法测定金属化合物的原理,用方块图示意其测定流程。 (1)利用待测元素原子蒸汽中基态原子对光源发出的特征谱线的吸收来进行分析。 (2) 原子吸收光谱法测定金属化合物测定流程 光源—单色器—样品室—检测器—显示光源—原子化系统—分 光系统—检测系统 16.石墨炉原子吸收光谱法与火焰原子吸收光谱法有何不同之处?两种方法各有何优缺点? (1)石墨炉原子吸收光谱法测定,其测定灵敏度高于火焰原子 吸收光谱法,但基体干扰较火焰原子吸收光谱法严重。 (2)火焰原子吸收光谱法温度高,准确度高,精密度低,石墨 炉原子吸收光谱法温度较低,准确度低,精密度高。 18.怎样用分光光度法测定水样中的六价铬? 六价铬用二苯碳酰二肼分光光度法测定,总铬用原子分光光度法。 19.试比较分光光度法和原子吸收光谱法的原理、仪器的主要组成部分及测定对象的主要不同之处。 (1)分光光度法是建立在分子吸收光谱基础上的分析方法,吸收峰峰值波长处的吸光度与被测物质的浓度之间的关系符合朗伯—比尔定律这是定量分析的基础。 原子吸收光谱法也称原子吸收分光光度法,简称原子吸收法。在一定实验条件下,特征光强的变化与火焰中待测基态原子的浓度有定量关系,故只要测得吸光度,就可以求出样品溶液中待测元素的浓度。 (2)分光光度法使用的仪器称为分光光度计,基本组成有光源、分光系统、吸收池、检测器及放大装置以及指示、记录系统。 原子吸收光谱法使用的仪器为原子吸收分光光度计或原子吸收光谱仪,它由光源、原子化系统、分光系统及检测系统四个主要部分组成。 (3)用分光光度法监测时,往往将被测物质转化成有色物质;原子吸收光谱法将含有待测元素的样品溶液通过原子化系统喷成细雾,并在火焰中解离成基态原子。 23.怎样采集和测定溶解氧的水样?说明氧电极法和碘量法测定溶解氧的原理。两种方法各有什么优缺点? (1)可用采样容器直接采集,水样需充满采样容器,宜在现场测定,方法有碘量法和氧电极法。 (2)氧电极法利用产生的与氧浓度成正比的扩散电流来求出水样中的溶解氧。碘量法利用Na2S2O3滴定释放出的碘计算出溶解氧含量。 (3)碘量法测定DO准确,简便;水中氧化性物质、还原性物质、亚硝酸盐、Fe3﹢等会干扰溶解氧的测定。氧电极法适用于地表水、地下水、生活污水、工业废水和盐水中DO的测定,不受色度。 第1章嵌入式系统基础 1.什么就是嵌入式系统?它由哪几部分组成?有何特点?写出您所想到得嵌 入式系统。 答:(1)定义:国内对嵌入式系统得一般定义就是:以应用为中心,以计算机技术为基础,软硬件可裁剪,从而能够适应实际应用中对功能、可 靠性、成本、体积、功耗等严格要求得专用计算机系统。 (2)组成:嵌入式处理器、外围设备、嵌入式操作系统与应用软件等几部分组成。 (3)特点:a、软硬件一体化,集计算机技术、微电子技术、行业技术于一体; b、需要操作系统支持,代码小,执行速度快; c、专用紧凑,用途固定,成本敏感; d、可靠性要求高; e、多样性,应用广泛,种类繁多。 (4)嵌入式系统:个人数字助理(PDA)、机顶盒(STB)、IP电话。 2.嵌入式处理器分为哪几类? 答:(1)低端得微控制器(MicroController Unit,MCU); (2)中高端得嵌入式微处理器(Embeded MicroProcessor Unit,EMPU); (3)通信领域得DSP处理器(Digital Signal Processor,DSP); (4)高度集成得片上系统(System on Chip,SoC)。 3.ARM英文原意就是什么?它就是一个怎样得公司?其处理器有何特点? 答:(1)英文原意:Advanced RISC Machines。高级精简指令集机器。 (2)公司简介:该公司就是全球领先得16/32位RISC微处理器知识产权设计供应商,通过将其高性能、低成本、低功耗得RISC微处理器、外围 与系统芯片设计技术转让给合作伙伴来生产各具特色得芯片。ARM公司 已成为移动通信、手持设备、多媒体数字消费嵌入式解决方案得RISC 标准。 (3)其处理器特点:a、小体积、低功耗、低成本而高性能;b、16/32位双指令集;c、全球得合作伙伴众多。 4.什么就是实时系统?它有哪些特征?如何分类? 答:(1)实时系统得定义:实时系统(Real Time System)就是指产生系统输出得时间对系统至关重要得系统。 (2)特征:实时性、并行性、多路性、独立性、可预测性、可靠性。 (3)分类:根据响应时间得不同,实时系统可分为3种类型:强实时系统、弱实时系统、一般实时系统。 根据确定性得不同,实时系统可分为2种类型:硬实时、软实时。 5.RTOS由哪几部分组成?它有哪些特点?与一般操作系统相比有何不同? 答:(1)组成:实时内核、网络组件、文件系统、图形用户界面。 (2)特点:a、支持异步事件得响应;b、中断与调度任务得优先级机制;c、支持抢占式调度;d、确定得任务切换时间与中断延迟时间;e、支持同 步。 (3)与一般OS得不同: a、实时性:响应速度快,只有几微秒;执行时间确定,可预测; b、代码尺寸小:只有10~100KB,节省内存空间,降低成本;孟祥莲嵌入式系统原理及应用教程部分习题答案
嵌入式复习思考题(1)答案
嵌入式课后答案
检测与转换课后习题答案
《ARM嵌入式系统结构与编程》第二章课后答案
嵌入式习题答案
测试技术课后题部分答案
(完整版)嵌入式系统课后答案马维华
嵌入式SQL习题答案
ARM嵌入式系统基础教程第二版课后习题答案
自动检测课后习题答案解析
arm嵌入式系统课后习题部分答案
自动检测技术_马西秦_第三版_习题答案
周立功-ARM嵌入式系统基础教程课后习题答案11
ARM嵌入式系统课后习题部分答案
环境监测第二章部分习题答案
嵌入式系统课后习题及答案
相关主题
文本预览