行星齿轮传动比计算
在《机械原理》上,行星齿轮求解是通过列一系列方程式求解,其求解过程繁琐容易出错,
其实用不着如此,只要理解了传动比e ab i 的含义,就可以很快地直接写出行星齿轮的传动比,
其关键是掌握几个根据e ab i 的含义推导出来公式,随便多复杂的行星齿轮传动机构,根据这
几个公式都能从头写到尾直接把其传动比写出来,而不要象《机械原理》里面所讲的方法列出一大堆方程式来求解。
一式求解行星齿轮传动比有三个基本的公式
1=+c ba a bc i i ――――――――――――――――――――――――1
a cx a bx a
bc
i i i = ―――――――――――――――――――――――――2 a cb a
bc i i 1= ――――――――――――――――――――――――――3
熟练掌握了这三个公式后,不管什么形式的行星齿轮传动机构用这些公式代进去后就能直接将传动比写出来了。关键是要善于选择中间的一些部件作为参照,使其最后形成都是定轴传动,所以这些参照基本都是一些行星架等
例如象论坛中“大模王”兄弟所举的例子:
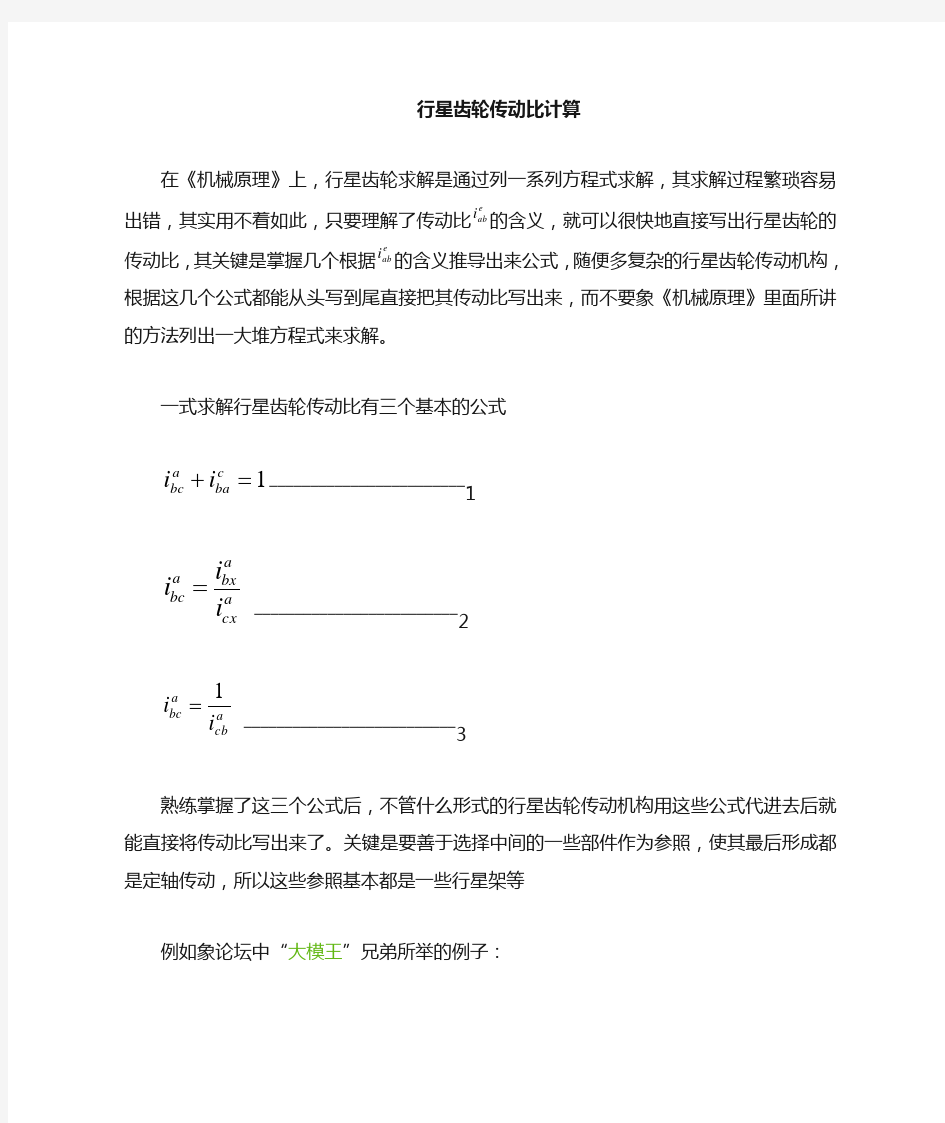
在此例中,要求出e ab i =?,如果行星架固定不动的话,这道题目就简单多了,就是一定轴
传动。所以我们要想办法把e ab i 变成一定轴传动,所以可以根据公式a cx a bx a bc
i i i =将x 加进去, 所以可以得出:e bx e ax e
ab i i i =要想变成定轴传动,就要把x 放到上面去,所以这里就要运用第
一个公式1=+c ba a
bc i i 了,所以)1()1(x
be x ae e
bx e ax e
ab i i i i i --==所以现在e ab i 就变成了两个定轴传
动之间的关系式了。定轴传动的传动比就好办了,直接写出来就可以了。 即)1()1())1(1())1(1()1()1(01
c e b
d a
e c e b d c e a c x be x ae e bx e ax e ab Z Z Z Z Z Z Z Z Z Z Z Z Z Z i i i i i ?-+=?--?--=--== 再例如下面的传动机构:
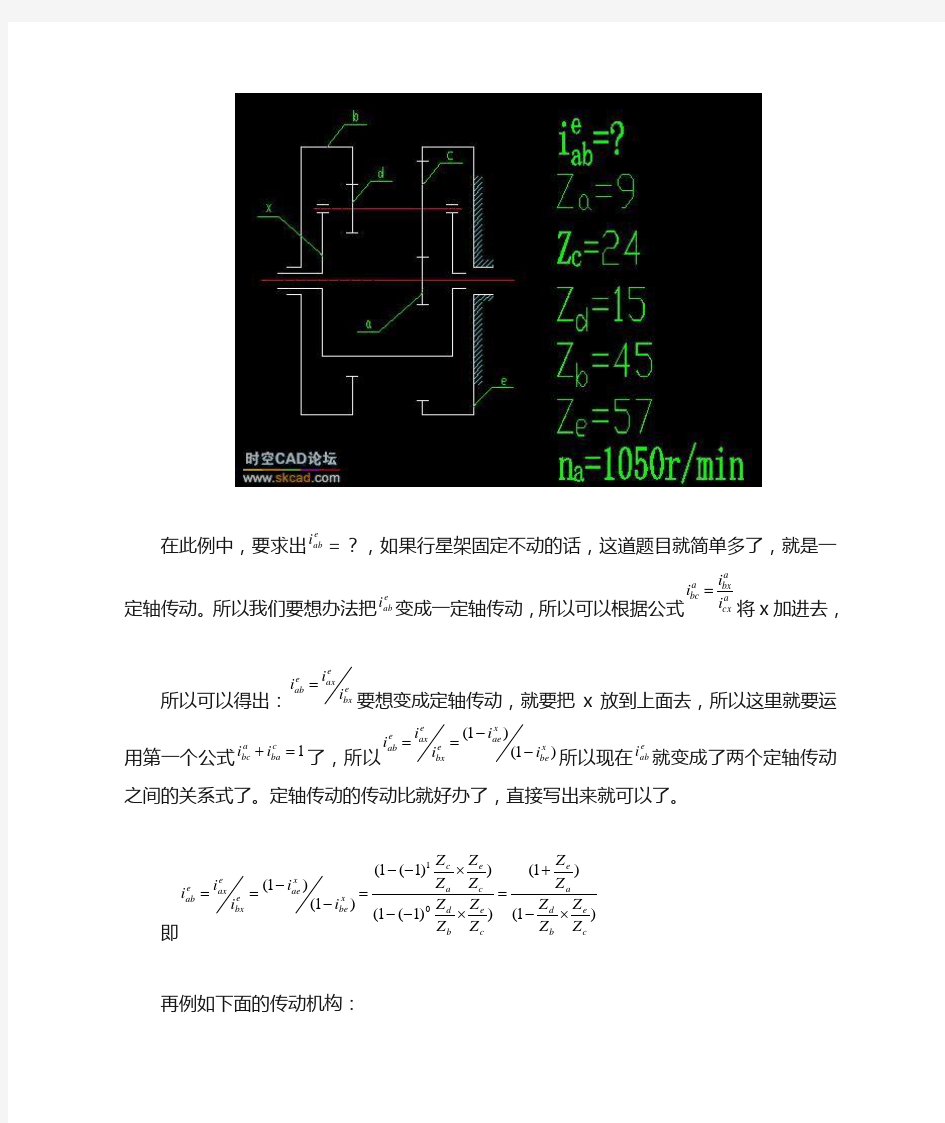
已知其各轮的齿数为z 1=100,z 2=101,z 2’ =100 ,z 3=99。其输入件对输出件1的传动比i H1
)1(11133
1311H H H H i i i i -===这样就把行星传动的计算转换为定轴传动了,所以将齿数代
入公式得出1H i =10000
最后愿我的这篇小文章能够给大家带来一点点帮助,我就心满意足了,在此感谢我读大学时的机械原理老师沈守范教授。
注:
H ab i =±所有从动轮齿数的连乘积所有主动轮齿数的连乘积
( 正负号不表示周转轮系中a 轮和b 轮的实际转向关系,而表示转化轮系中a 轮和b 轮的转向关系。转向相同取正,相反取负。 不能省略正负号,此处正负号关系着传动比的计算数值!)
行星传动传动比及啮合频率计算 特征频率主要包含转频和啮合频率,根据传动比计算的结果,可以相应的算出每个齿轮相对应的转速n ,则转频60i i f n =,齿轮啮合频率等于该齿轮的转频乘以它的齿数。相互啮合的两个齿轮的啮合频率是相等的。即zi i i f f z =?。而齿轮的振动谱就是以该基频(zi f )波和高次谐波所组成的谱,因此在故障诊断中具有重大意义。又因为相互啮合的两个齿轮的啮合频率是相等的,所以一组行星轮系当中只要计算中心论转速即可。 1 a 1 b 1 c 2 a 2 b 2 c Input Shaft Output Shaft 2 d 1 d 3 d 4 d 齿轮模型 齿轮箱各级齿轮参数 参数 行星齿轮箱 平行轴齿轮箱 一级 二级 高速级 低速级 a 1 b 1 c 1 a 2 b 2 c 2 d 1 d 2 d 3 d 4 模数 1 1 1 1 1 1 1.5 1.5 1.5 1.5 齿数 20 40 100 28 36 100 29 100 90 36 个数 1 3 1 1 4 1 1 1 1 1
n –输入转速; Za1–第一级太阳轮齿数;Zb1 –第一级行星轮齿数;Zc1–第一级内齿圈齿数; Za2 –第二级太阳轮齿数;Zb2 –第二级行星轮齿数;Zc2 –第二级内齿圈齿数; (1) 一级行星轮系: 111111a H c c H a n n z n n z -=-- 其中,n n n a c ==11,0 ,则 )1//(11111+==a c a H b z z n n n =n 6 1 (2) 二级行星轮系: 222 222 a H c c H a n n z n n z -=--其中, 1 22,0H a c n n n ==,则 )1//(22222+==a c a H b z z n n n =232 7 a n 行星轮系级: 传动比i =192/7 (3)平行轴: 中间低速级: 传动比i1= 小 大 n n =100/29 高速级: 传动比i2= 小 大 n n =2.5 平行轴传动比:i=8.6 总传动比:i=232 齿轮箱振动特征频率 1. 啮合频率: 1)转速同步频率 n f = n/60 式中,n 为轴转速(转/分)。 2)定轴齿轮啮合频率 n f = nz/60 式中,n 为轴转速(转/分), r z 为齿轮齿数。 3)行星轮系,啮合频率用下式计算: m f = a b a c b z f f z f ?-=?)( 式中,b n 为行星轮架转速(转/分),c z 为内 齿圈齿数,a f 为太阳轮转频,a z 为太阳轮齿数。 m f =(15.95-1.975)*13=181.675 m f =1.975*92=181.7
行星齿轮传动比计算 在《机械设计》上,行星齿轮求解是通过列一系列方程式求解,其求解过程繁琐容易出错, 其实用不着如此,只要理解了传动比e ab i 的含义,就可以很快地直接写出行星齿轮的传动比, 其关键是掌握几个根据e ab i 的含义推导出来公式,随便多复杂的行星齿轮传动机构,根据这 几个公式都能从头写到尾直接把其传动比写出来,而不要象《机械原理》里面所讲的方法列出一大堆方程式来求解。 一式求解行星齿轮传动比有三个基本的公式 1=+c ba a bc i i ――――――――――――――――――――――――1 a cx a bx a bc i i i = ―――――――――――――――――――――――――2 a cb a bc i i 1= ――――――――――――――――――――――――――3 熟练掌握了这三个公式后,不管什么形式的行星齿轮传动机构用这些公式代进去后就能直接将传动比写出来了。关键是要善于选择中间的一些部件作为参照,使其最后形成都是定轴传动,所以这些参照基本都是一些行星架等 例如象论坛中“大模王”兄弟所举的例子:
在此例中,要求出e ab i =?,如果行星架固定不动的话,这道题目就简单多了,就是一定轴 传动。所以我们要想办法把e ab i 变成一定轴传动,所以可以根据公式a cx a bx a bc i i i =将x 加进去, 所以可以得出:e bx e ax e ab i i i =要想变成定轴传动,就要把x 放到上面去,所以这里就要运用第 一个公式1=+c ba a bc i i 了,所以)1()1(x be x ae e bx e ax e ab i i i i i --==所以现在e ab i 就变成了两个定轴传 动之间的关系式了。定轴传动的传动比就好办了,直接写出来就可以了。 即)1()1())1(1())1(1()1()1(01 c e b d a e c e b d c e a c x be x ae e bx e ax e ab Z Z Z Z Z Z Z Z Z Z Z Z Z Z i i i i i ?-+=?--?--=--== 再例如下面的传动机构: 已知其各轮的齿数为z 1=100,z 2=101,z 2’ =100 ,z 3=99。其输入件对输出件1的传动比i H1 )1(11133 1311H H H H i i i i -===这样就把行星传动的计算转换为定轴传动了,所以将齿数代 入公式得出1H i =10000 最后愿我的这篇小文章能够给大家带来一点点帮助,我就心满意足了,在此感谢我读大学时的机械原理老师沈守范教授。
齿轮的基本参数和计算 公式 -CAL-FENGHAI.-(YICAI)-Company One1
87一基本参数 表示;齿顶圆:轮齿齿顶所对应的圆称为齿顶圆,其直径用d齿根圆:齿轮的齿槽底部所对应的圆称为齿根圆,直径用df表示。 齿厚:任意直径dk的圆周上,轮齿两侧齿廓间的弧长称为该圆上的齿厚,用sk表示;齿槽宽:任意直径dk的圆周上,齿槽两侧齿廓间的弧长称为该圆上的齿槽宽,用ek表示; 齿距:相邻两齿同侧齿廓间的弧长称为该圆上的齿距,用表示。设z为齿数,则根据齿距定义可,故。 齿轮不同直径的圆周上,比值不同,而且其中还包含无理数 k也是不等的。又由渐开线特性可知,在不同直径的圆周上,齿廓各点的压力角 分度圆:为了便于设计、制造及互换,我们把齿轮某一圆周上的比值规定为标准值(整数或较完整的有理数),并使该圆上的压力角也为标准值,这个圆称为分度圆,其直径以d表示。 表示,我国国家标准规定的标准压力角为20°压力角:分度圆上的压力角简称为压力角,以 模数:分度圆上的齿距p对的比值称为模数,用m表示,单位为mm,即。模数是齿轮的主要参数之一,齿轮的主要几何尺寸都与模数成正比,m越 大,则p越大,轮齿就越大,轮齿的抗弯能力就越强,所以模数m又是轮齿抗弯能力的标志。 顶隙:顶隙c=c*m是指一对齿轮啮合时,一个齿轮的齿顶圆到另一个齿轮的齿根圆的径向距离。顶隙有利于润滑油的流动。 表示;齿顶高:轮齿上介于齿顶圆和分度之间的部分称为齿顶,其径向高度称为齿顶高,用h 齿根高:轮齿上介于齿根圆和分度之间的部分称为齿根,其径向高度称为齿根高,用hf 表示
标准齿轮:标准齿轮:分度圆上齿厚与齿槽宽相等,且齿顶高和齿根高为标准值的齿轮为标准齿轮。因此,对于标准齿轮有 模数和齿数是齿轮最主要的参数。在齿数不变的情况下,模数越大则轮齿越大,抗折断的能力越强,当然齿轮轮坯也越大,空间尺寸越大;模数不变的情况下,齿数越大则渐开线越平缓,齿顶圆齿厚、齿根圆齿厚相应地越厚; 齿轮计算公式
行星轮系传动比的计算 【一】能力目标 1.能正确计算行星轮系和复合轮系的传动比。 2.熟悉轮系的应用。 【二】知识目标 1.掌握转化机构法求行星轮系的传动比。 2.掌握混合轮系传动比的计算。 3.熟悉轮系的应用。 【三】教学的重点与难点 重点:行星轮系、混合轮系传动比的计算。 难点:转化机构法求轮系的传动比。 【四】教学方法与手段 采用多媒体教学,联系实际讲授,提高学生的学习兴趣。 【五】教学任务及内容 一、行星轮系传动比的计算 (一)行星轮系的分类 若轮系中,至少有一个齿轮的几何轴线不固定,而绕其它齿轮的固定几何轴线回转,则称为行星轮系。 行星轮系的组成:行星轮、行星架(系杆)、太阳轮 (二)行星轮系传动比的计算 以差动轮系为例(反转法) 转化机构(定轴轮系) T的机构
1 2 3 4 差动轮系:2个运动 行星轮系:, 对于行量轮系: ∴ ∴ 例12.2:图示为一大传动比的减速器,Z 1=100,Z 2=101,Z 2'=100,Z 3=99。求:输入件H 对输出件1的传动比i H1 解:1,3中心轮;2,2'行星轮;H 行星架 给整个机构(-W H )绕OO 轴转动 H H W W W -=111W H H W W W -=222W H H W W W -=333 W 0=-=H H H H W W W H W 13 313 113 )1(Z Z W W W W W W i H H H H H ?'-=--==03=W 13 10Z Z W W W H H -=--11 31 1+== Z Z W W i H H ) (z f W W W W W W i H B H A H B H A H AB =--==0=B W AH H A H H A H AB i W W W W W i -=-=--= 110H AB AH i i -=1
行星齿轮传动比计算 在《机械原理》上,行星齿轮求解是通过列一系列方程式求解,其求解过程繁琐容易出错,其实用不着如此,只要理解了传动比e ab i 的含义,就可以很快地直接写出行星齿轮的传动比,其关键是掌握几个根据e ab i 的含义推导出来公式,随便多复杂的行星齿轮传动机构,根据这几个公式都能从头写到尾直接把其传动比写出来,而不要象《机械原理》里面所讲的方法列出一大堆方程式来求解。 一式求解行星齿轮传动比有三个基本的公式 1=+c ba a bc i i ――――――――――――――――――――――――1 a cx a bx a bc i i i = ―――――――――――――――――――――――――2 a cb a bc i i 1= ――――――――――――――――――――――――――3 熟练掌握了这三个公式后,不管什么形式的行星齿轮传动机构用这些公式代进去后就能直接将传动比写出来了。关键是要善于选择中间的一些部件作为参照,使其最后形成都是定轴传动,所以这些参照基本都是一些行星架等 例如象论坛中“大模王”兄弟所举的例子:
在此例中,要求出e ab i =?,如果行星架固定不动的话,这道题目就简单多了,就是一定轴 传动。所以我们要想办法把e ab i 变成一定轴传动,所以可以根据公式a cx a bx a bc i i i =将x 加进去, 所以可以得出:e bx e ax e ab i i i =要想变成定轴传动,就要把x 放到上面去,所以这里就要运用第 一个公式1=+c ba a bc i i 了,所以)1()1(x be x ae e bx e ax e ab i i i i i --==所以现在e ab i 就变成了两个定轴传动之间的关系式了。定轴传动的传动比就好办了,直接写出来就可以了。 即)1()1())1(1())1(1()1()1(01 c e b d a e c e b d c e a c x be x ae e bx e ax e ab Z Z Z Z Z Z Z Z Z Z Z Z Z Z i i i i i ?-+=?--?--=--== 再例如下面的传动机构: 已知其各轮的齿数为z 1=100,z 2=101,z 2’ =100 ,z 3=99。其输入件对输出件1的传动比i H1 )1(11133 1311H H H H i i i i -===这样就把行星传动的计算转换为定轴传动了,所以将齿数代 入公式得出1H i =10000 最后愿我的这篇小文章能够给大家带来一点点帮助,我就心满意足了,在此感谢我读大学时的机械原理老师沈守范教授。 注: H ab i =±所有从动轮齿数的连乘积所有主动轮齿数的连乘积 ( 正负号不表示周转轮系中a 轮和b 轮的实际转向关系,而表示转化轮系中a 轮和b 轮的转向关系。转向相同取正,相反取负。 不能省略正负号,此处正负号关系着传动比的计算数值!)
齿轮基本计算公式-CAL-FENGHAI.-(YICAI)-Company One1
齿轮计算公式 节圆柱上的螺旋角:L d /tan 00?=πβ 基圆柱上的螺旋角:n g αββcos sin sin 0?= 齿厚中心车角:Z θ/90?= 销子直径:m 728.1dp ?= 中心距离增加系数:)1cos /(cos )2/)((y b 021-?+=ααZ Z 标准正齿轮的计算(小齿轮①,大齿轮②) 1. 齿轮齿 标准 2. 工齿齿形 直齿 3. 模数 m 4. 压力角 c αα=0 5. 齿数 21,Z Z 6. 有效齿深 m 2h e ?= 7. 全齿深 c m h +=2 8. 齿顶隙 m 35.0,m 25.0,m 2.0c ???= 9. 基础节圆直径 m d 0?=Z 10. 外径 m )2(d k ?+=Z 11. 齿底直径 c 2m )2(d r ?-?-=Z 12. 基础圆直径 0g cos m d αZ ??= 13. 周节 m t 0?=π 14. 法线节距 0e cos m t απ??= 15. 圆弧齿厚 2/m S 0?=π 16. 弦齿厚 )2sin(m S 1 j Z π Z ???= 17. 齿轮油标尺齿高 m m h j +Z ?-??Z =)2cos 1()2/(π
18. 跨齿数 5.0)180/(0m ??=Z αZ 19. 跨齿厚 ])5.0([cos 0o m inva m m S Z ?-?Z ??=πα 20. 销子直径 m 728.1d ?= 21. 圆柱测量尺寸 d m d m +?Z =)cos /cos (0φα (偶数齿) d )]90(cos )cos /cos m [(d 0m +? ??=Z φαZ (奇数齿) 其中, 00)2 cos (1απαφinv m d inv +-?Z 22. 齿隙 f 移位正齿轮计算公式(小齿轮①,大齿轮②) 1. 齿轮齿形 转位 2. 工具齿形 直齿 3. 模数 m 4. 压力角 c αα=0 5. 齿数 Z 6. 有效齿深 m 2h e ?= 7. 全齿深 c m )]x x (y 2[h 21+??-+= 或 c m 2h +?= 8. 齿隙 c 9. 转位系数 x 10. 中心距离 m y x ?+=αα 11. 基准节圆直径 m d 0?=Z 12. 啮合压力角 02 12 10b inv )x x ( tan 2inv αZ Z αα+++?= 13. 啮合节圆直径 )( x 2d 2 11 b Z Z Z α+??= 14. 外径 m )x y (2m )2(d 21k ?-?+?+=Z 15. 齿顶圆直径 h 2d d 1k r ?-= 16. 基圆直径 0cos t g m d α??Z =
【最新整理,下载后即可编辑】 行星轮系传动比的计算 【一】能力目标 1.能正确计算行星轮系和复合轮系的传动比。 2.熟悉轮系的应用。 【二】知识目标 1.掌握转化机构法求行星轮系的传动比。 2.掌握混合轮系传动比的计算。 3.熟悉轮系的应用。 【三】教学的重点与难点 重点:行星轮系、混合轮系传动比的计算。 难点:转化机构法求轮系的传动比。 【四】教学方法与手段 采用多媒体教学,联系实际讲授,提高学生的学习兴趣。【五】教学任务及内容 一、行星轮系传动比的计算 (一)行星轮系的分类
若轮系中,至少有一个齿轮的几何轴线不固定,而绕其它齿轮的固定几何轴线回转,则称为行星轮系。 行星轮系的组成:行星轮、行星架(系杆)、太阳轮 (二)行星轮系传动比的计算 以差动轮系为例(反转法) 转化机构(定轴轮系) T 的机构 1 2 3 4 差动轮系:2个运动 行星轮系:, H H W W W -=111W H H W W W -=222W H H W W W -=333 W 0=-=H H H H W W W H W 13 313 113 )1(Z Z W W W W W W i H H H H H ?'-=--==03=W 1 3 10Z Z W W W H H -=--11 31 1+== Z Z W W i H H ) (z f W W W W W W i H B H A H B H A H AB =--==
对于行量轮系: ∴ ∴ 例12.2:图示为一大传动比的减速器,Z 1 =100,Z 2 =101,Z 2' =100, Z 3 =99。求:输入件H对输出件1的传动比i H1 解:1,3中心轮;2,2'行星轮;H行星架 给整个机构(-W H )绕OO轴转动 = B W AH H A H H A H AB i W W W W W i- = - = - - =1 1 H AB AH i i- =1 2 1 3 2 2 3 1 13 )1 ( ' ? ? ? - = - - = Z Z Z Z W W W W i H H H
齿轮参数计算公式 节圆柱上的螺旋角: 基圆柱上的螺旋角: 齿厚中心车角: 销子直径: 中心距离增加系数: 一、标准正齿轮的计算(小齿轮①,大齿轮②)1.齿轮齿标准 2.工齿齿形直齿 3.模数 m 4.压力角 5.齿数 6.有效齿深 7.全齿深 8.齿顶隙 9.基础节圆直径 10.外径 11.齿底直径 12.基础圆直径 13.周节 14.法线节距 15.圆弧齿厚 16.弦齿厚
17.齿轮油标尺齿高 18.跨齿数 19.跨齿厚 20.销子直径 21.圆柱测量尺寸(偶数齿) (奇数齿)其中, 22.齿隙 ? 二、移位正齿轮计算公式(小齿轮①,大齿轮②) 1.齿轮齿形转位 2.工具齿形直齿 3.模数 4.压力角 5.齿数 6.有效齿深 7.全齿深或 8.齿隙 9.转位系数 10.中心距离 11.基准节圆直径 12.啮合压力角 13.啮合节圆直径
14.外径 15.齿顶圆直径 16.基圆直径 17.周节 18.法线节距 19.圆弧齿厚 20.弦齿厚 21.齿轮游标尺齿高 22.跨齿数 23.跨齿厚 24.梢子直径 25.圆柱测量尺寸(偶数齿) (奇数齿) 三、标准螺旋齿的计算公式(齿直角方式)(小齿轮①,大齿轮②) 1.齿轮齿形标准 2.齿形基准断面齿直角 3.工具齿形螺旋齿 4.模数
5.压力角 6.齿数 7.螺旋角方向(左或右)8.有效齿深 9.全齿深 10.正面压力角 11.中心距离 12.基准节圆直径 13.外径 14.齿底圆直径 15.基圆直径 16.基圆上的螺旋角 17.导程 18.周节(齿直角) 19.法线节距(齿直角) 20.圆弧齿厚(齿直角)21.相当正齿轮齿数 22.弦齿厚
行星齿轮传动比分析与计算 一、行星轮系传动比的计算 (一)行星轮系的分类 若轮系中,至少有一个齿轮的几何轴线不固定,而绕其它齿轮的固定几何轴线回转,则称为行星轮系。 行星轮系的组成:行星轮、行星架(系杆)、太阳轮 (二)行星轮系传动比的计算 以差动轮系为例(反转法) 转化机构(定轴轮系) T 的机构 1 2 3 4 差动轮系:2个运动 行星轮系: , 对于行量轮系: H H W W W -=111W H H W W W -=222W H H W W W -=333 W 0=-=H H H H W W W H W 13 313 113 )1(Z Z W W W W W W i H H H H H ?'-=--==0 3=W 1 3 10Z Z W W W H H -=--11 31 1+== Z Z W W i H H ) (z f W W W W W W i H B H A H B H A H AB =--==0=B W
∴ ∴ 例12.2:图示为一大传动比的减速器,Z 1=100,Z 2=101,Z 2'=100,Z 3=99。求:输入件H 对输出件1的传动比i H1 解:1,3中心轮;2,2'行星轮;H 行星架 给整个机构(-W H )绕OO 轴转动 ∵W 3=0 ∴ ∴ 若Z 1=99 行星轮系传动比是计算出来的,而不是判断出来的。 AH H A H H A H A B i W W W W W i -=-=--= 110H AB AH i i -=1213 223113)1(' ???-=--= Z Z Z Z W W W W i H H H H H H i Z Z Z Z W W W 13 213210' =--H H i Z Z Z Z W W 13 21321 1'=+- H H i i 13 1100100991011??- =10000 1001009910111 111=??- = = H H i i 1001-=H i
齿轮计算公式 节圆柱上的螺旋角:L d /tan 00?=πβ 基圆柱上的螺旋角:n g αββcos sin sin 0?= 齿厚中心车角:Z θ/90?= 销子直径:m 728.1dp ?= 中心距离增加系数:)1cos /(cos )2/)((y b 021-?+=ααZ Z 标准正齿轮的计算(小齿轮①,大齿轮②) 1. 齿轮齿 标准 2. 工齿齿形 直齿 3. 模数 m 4. 压力角 c αα=0 5. 齿数 21,Z Z 6. 有效齿深 m 2h e ?= 7. 全齿深 c m h +=2 8. 齿顶隙 m 35.0,m 25.0,m 2.0c ???= 9. 基础节圆直径 m d 0?=Z 10. 外径 m )2(d k ?+=Z 11. 齿底直径 c 2m )2(d r ?-?-=Z 12. 基础圆直径 0g cos m d αZ ??= 13. 周节 m t 0?=π 14. 法线节距 0e cos m t απ??= 15. 圆弧齿厚 2/m S 0?=π 16. 弦齿厚 )2sin( m S 1 j Z π Z ???= 17. 齿轮油标尺齿高 m m h j +Z ?-??Z =)2cos 1()2/(π 18. 跨齿数 5.0)180/(0m ??=Z αZ
19. 跨齿厚 ])5.0([cos 0o m inva m m S Z ?-?Z ??=πα 20. 销子直径 m 728.1d ?= 21. 圆柱测量尺寸 d m d m +?Z =)cos /cos (0φα (偶数齿) d )]90(cos )cos /cos m [(d 0m +? ??=Z φαZ (奇数齿) 其中, 00)2 cos (1απαφ inv m d inv +-?Z 22. 齿隙 f ? 移位正齿轮计算公式(小齿轮①,大齿轮②) 1. 齿轮齿形 转位 2. 工具齿形 直齿 3. 模数 m 4. 压力角 c αα=0 5. 齿数 Z 6. 有效齿深 m 2h e ?= 7. 全齿深 c m )]x x (y 2[h 21+??-+= 或 c m 2h +?= 8. 齿隙 c 9. 转位系数 x 10. 中心距离 m y x ?+=αα 11. 基准节圆直径 m d 0?=Z 12. 啮合压力角 02 12 10b inv )x x ( tan 2inv αZ Z αα+++?= 13. 啮合节圆直径 )( x 2d 2 11 b Z Z Z α+??= 14. 外径 m )x y (2m )2(d 21k ?-?+?+=Z 15. 齿顶圆直径 h 2d d 1k r ?-= 16. 基圆直径 0cos t g m d α??Z = 17. 周节 m t 0?=π 18. 法线节距 00cos m t απ??=
行星齿轮机构传动比计算方法
Key words: epicyclic gear train; speed ratio; compute way. 随着行星齿轮减速器以及行星齿轮传动在变速箱中的广泛应用,对行星齿轮传动的了解和掌握已成为工程技术人员的必要技能。但是,对于刚接触行星齿轮传动的工程技术人员来说,行星齿轮传动的速比计算比较不容易理解和掌握。本文通过对各类参考资料及教科书中的行星齿轮传动速比计算方法进行总结归纳,并针对常用的最具代表性的2K-H型行星齿轮传动,分别用不同方法对其传动特性方程进行了推导论证。 行星齿轮传动或称周转轮系。根据《机械原理》[1]上的定义,我们可把周转轮系分为差动轮系和行星轮系。为理解方便,本论文所讨论限于2K-H型周转轮系。 关于行星齿轮传动(周转轮系)的速比计算方法,归纳起来有两大类四种方法,分别为由行星架固定法和力矩法组成的分析法;由速度图解法和矢量法组成的图解法[2]。矢量图解法一般适用于圆锥齿轮组成的行星齿轮传动,在此不作介绍;下面分别运用其它三种计算方法对2K-H型周转轮系的传动特性方程(1)进行推导。
1-太阳轮 2-行星轮 3-内齿圈 H -行星架 图1 行星齿轮传动 Fig 1 Epicyclic gear train 0)1(31=++-αωωαωH (1) 结合图1,式中1ω为太阳轮1的转速、H ω为行星架H 转速、3 ω为内齿圈3转速、α为内齿圈3与太阳轮1的齿数比即1 3 Z Z =α。 1 行星架固定法 机械专业教科书上一般介绍的都是此种方法,也可叫转化机构法。其理论是一位名叫Wlies 的科学家于1841年提出的,即“一个机构整体的绝对运动并不影响其内部各构件间的相对运动” [3],就像手表的时针、分针、秒针的相对运动不会因带表人的行动而变化。 如图2所示,其中太阳轮1、行星轮2、内齿圈3、行星架H 的转速分别为H ωωωω、、、321。我们假定整个行星轮系放在一个绕支点O 旋转的圆盘上,此圆盘的转速为 H ω-。那么,此时行星架的转速为()0=-+=H H H H ωωω,相当于行星
齿 轮 系 传 动 比 计 算 1 齿轮系的分类 在复杂的现代机械中,为了满足各种不同的需要,常常采用一系列齿轮组成的传动系统。这种由一系列相互啮合的齿轮(蜗杆、蜗轮)组成的传动系统即齿轮系。下面主要讨论齿轮系的常见类型、不同类型齿轮系传动比的计算方法。 齿轮系可以分为两种基本类型:定轴齿轮系和行星齿轮系。 一、定轴齿轮系 在传动时所有齿轮的回转轴线固定不变齿轮系,称为定轴齿轮系。定轴齿轮系是最基本的齿轮系,应用很广。如下图所示。 二、行星齿轮系 若有一个或一个以上的齿轮除绕自身轴线自转外,其轴线又绕另一个轴线转动的轮系称为行星齿轮系,如下图所示。 1. 行星轮——轴线活动的齿轮. 2. 系杆 (行星架、转臂) H . 3. 中心轮 —与系杆同轴线、 与行星轮相啮合、轴线固定的齿轮 4. 主轴线 —系杆和中心轮所在轴线. 5. 基本构件—主轴线上直接承受 载荷的构件. 行星齿轮系中,既绕自身轴线自转又绕另一固定轴线(轴线O1)公转的齿轮2形象的称为行星轮。支承行星轮作自转并带动行星轮作公转的构件H 称为行星架。轴线固定的齿轮1、3则称为中心轮或太阳轮。因此行星齿轮系是由中心轮、行星架和行星轮三种基本构件组成。显然,行星齿轮系中行星架与两中心轮的几何轴线(O1-O3-OH )必须重合。否则无法运动。 根据结构复杂程度不同,行星齿轮系可分为以下三类: (1)单级行星齿轮系: 它是由一级行星齿轮传动机构构成的轮系。一个行星架及和其上的行星轮及与之啮合的中心轮组成。 (2)多级行星齿轮系:它是由两级或两级以上同类单级行星齿轮传动机构构成的轮系。 (3)组合行星齿轮系:它是由一级或多级以上行星齿轮系与定轴齿轮系组成的轮系。 行星齿轮系 根据自由度的不同。可分为两类: 1450rpm 53.7rpm
创作编号:BG7531400019813488897SX 创作者:别如克* 行星轮系传动比的计算 【一】能力目标 1.能正确计算行星轮系和复合轮系的传动比。 2.熟悉轮系的应用。 【二】知识目标 1.掌握转化机构法求行星轮系的传动比。 2.掌握混合轮系传动比的计算。 3.熟悉轮系的应用。 【三】教学的重点与难点 重点:行星轮系、混合轮系传动比的计算。 难点:转化机构法求轮系的传动比。 【四】教学方法与手段 采用多媒体教学,联系实际讲授,提高学生的学习兴趣。 【五】教学任务及内容 一、行星轮系传动比的计算 (一)行星轮系的分类 若轮系中,至少有一个齿轮的几何轴线不固定,而绕其它齿轮的固定几何轴线回转,则称为行星轮系。
行星轮系的组成:行星轮、行星架(系杆)、太阳轮 (二)行星轮系传动比的计算 以差动轮系为例(反转法) 转化机构(定轴轮系) T 的机构 1 H H W W W -=111W 2 H H W W W -=222W 3 H H W W W -=333 W 4 0=-=H H H H W W W H W 13 313 113 )1(Z Z W W W W W W i H H H H H ?'-=--== 差动轮系:2个运动 行星轮系: 3=W , 1 3 10Z Z W W W H H -=-- 11 31 1+== Z Z W W i H H ) (z f W W W W W W i H B H A H B H A H AB =--== 对于行量轮系:0=B W ∴ AH H A H H A H A B i W W W W W i -=-=--= 110 ∴H AB AH i i -=1 例12.2:图示为一大传动比的减速器,Z 1=100,Z 2=101,Z 2'=100,Z 3=99。求:输入件H 对输出件1的传动比i H1
第7节 标准斜齿圆柱齿轮的强度计算 一. 齿面接触疲劳强度计算 1. 斜齿轮接触方式 2. 计算公式 校核式: 设计式: 3. 参数取值说明 1) Z E ---弹性系数 2) Z H ---节点区域系数 3) ---斜齿轮端面重合度 4) ---螺旋角。斜齿轮:=80~250;人字齿轮=200~350 5) 许用应力:[H ]=([H1]+[H2])/2[H2] 6) 分度圆直径的初步计算 在设计式中,K 等与齿轮尺寸参数有关,故需初步估算: a) 初取K=K t b) 计算d t c) 修正d t 二. 齿根弯曲疲劳强度计算 1. 轮齿断裂 2. 计算公式校核式: 设计式: 3. 参数取值说明 1) Y F a 、Y Sa ---齿形系数和应力修正系数。Z v =Z/cos 3 Y Fa 、Y Fa 2) Y ---螺旋角系数。 3) 初步设计计算 在设计式中,K 等与齿轮尺寸参数有关,故需初步估算: d) 初取K=K t e) 计算m nt f) 修正m n [] H t H E H u u bd KF Z Z σεσα≤±=1 1[] 3 2 1112??? ? ??±≥H H E d Z Z u u KT d σεψα[]3 2 1112 ??? ? ??±≥H H E d t t Z Z u u T K d σψ311t t K K d d ≥[]F n sa Fa t F bm Y Y Y KF σεσα β ≤=[]3 2121cos 2F sa Fa d n Y Y z Y KT m σεψβα β≥3t t n n K K m m ≥[] 3 2121cos 2F sa Fa d t nt Y Y z Y T K m σεψβα β≥
齿轮基本尺寸计算公 式
齿轮参数计算公式 节圆柱上的螺旋角: 基圆柱上的螺旋角: 齿厚中心车角: 销子直径: 中心距离增加系数: 一、标准正齿轮的计算(小齿轮①,大齿轮②)1.齿轮齿标准 2.工齿齿形直齿 3.模数 m 4.压力角 5.齿数 6.有效齿深 7.全齿深 8.齿顶隙 9.基础节圆直径 10.外径 11.齿底直径 12.基础圆直径 13.周节 14.法线节距 15.圆弧齿厚 16.弦齿厚
17.齿轮油标尺齿高 18.跨齿数 19.跨齿厚 20.销子直径 21.圆柱测量尺寸(偶数齿) (奇数齿)其中, 22.齿隙 ? 二、移位正齿轮计算公式(小齿轮①,大齿轮②) 1.齿轮齿形转位 2.工具齿形直齿 3.模数 4.压力角 5.齿数 6.有效齿深 7.全齿深或 8.齿隙 9.转位系数 10.中心距离 11.基准节圆直径 12.啮合压力角 13.啮合节圆直径
14.外径 15.齿顶圆直径 16.基圆直径 17.周节 18.法线节距 19.圆弧齿厚 20.弦齿厚 21.齿轮游标尺齿高 22.跨齿数 23.跨齿厚 24.梢子直径 25.圆柱测量尺寸(偶数齿) (奇数齿) 三、标准螺旋齿的计算公式(齿直角方式)(小齿轮①,大齿轮②) 1.齿轮齿形标准 2.齿形基准断面齿直角 3.工具齿形螺旋齿 4.模数 5.压力角
6.齿数 7.螺旋角方向(左或右)8.有效齿深 9.全齿深 10.正面压力角 11.中心距离 12.基准节圆直径 13.外径 14.齿底圆直径 15.基圆直径 16.基圆上的螺旋角 17.导程 18.周节(齿直角) 19.法线节距(齿直角) 20.圆弧齿厚(齿直角)21.相当正齿轮齿数 22.弦齿厚 23.齿轮游标尺齿深
行星齿轮传动比计算 行星齿轮传动比计算在《机械设计》上,行星齿轮求解是通过列一系列方程式求解,其求解过程繁琐容易出错, ei其实用不着如此,只要理解了传动比的含义,就可以很快地直接写出行星齿轮的传动比,ab ei其关键是掌握几个根据的含义推导出来公式,随便多复杂的行星齿轮传动机构,根据这ab 几个公式都能从头写到尾直接把其传动比写出来,而不要象《机械原理》里面所讲的方法列出一大堆方程式来求解。 一式求解行星齿轮传动比有三个基本的公式 aci,i,1――――――――――――――――――――――――1bc ba aiabxi,bca ―――――――――――――――――――――――――2icx 1ai,bca ――――――――――――――――――――――――――3icb 熟练掌握了这三个公式后,不管什么形式的行星齿轮传动机构用这些公式代进去后就能直接将传动比写出来了。关键是要善于选择中间的一些部件作为参照,使其最后形成都是定轴传动,所以这些参照基本都是一些行星架等 例如象论坛中“大模王”兄弟所举的例子:
ei在此例中,要求出,,,如果行星架固定不动的话,这道题目就简单多了,就是一定轴ab aieabxi传动。所以我们要想办法把变成一定轴传动,所以可以根据公式将x 加进去,i,abbcaicx eieaxi,所以可以得出:要想变成定轴传动,就要把x放到上面去,所以这里就要运用第eabibx exi(1,i)eeacaxaeii,,一个公式了,所以所以现在就变成了两个定轴传i, i,1exababbcbai(1,i)bxbe 动之间的关系式了。定轴传动的传动比就好办了,直接写出来就可以了。 ZZZ1cee,,,,(1(1))(1)exZZZi,i(1)eacaaxaei,,,,即 exabi,i(1)ZZZZ0bxbedede(1(1))(1),,,,,ZZZZbcbc 再例如下面的传动机构: 已知其各轮的齿数为z=100,z=101,z=100 ,z=99。其输入件对输出件1的传动比i122’ 3H1 311i,i,,这样就把行星传动的计算转换为定轴传动了,所以将齿数代 3HH1H1i(1,i)1H13
标准齿轮模数齿数计算公式 找对应表太不现实了! 告诉你一简单的: 齿轮的直径计算方法: 齿顶圆直径=(齿数+2)*模数 分度圆直径=齿数*模数 齿根圆直径=齿顶圆直径-(4.5×模数) 比如:M4 32齿34*3.5 齿顶圆直径=(32+2)*4=136mm 分度圆直径=32*4=128mm 齿根圆直径=136-4.5*4=118mm 7M 12齿中心距D=(分度圆直径1+分度圆直径2)/2 就是 (12+2)*7=98mm 这种计算方法针对所有的模数齿轮(不包括变位齿轮)。 模数表示齿轮牙的大小。 齿轮模数=分度圆直径÷齿数 =齿轮外径÷(齿数+2) 齿轮模数是有国家标准的(GB1357-78) 模数标准系列(优先选用)1、1.25、1.5、2、2.5、3、4、5、6、8、10、12、14、16、20、25、32、40、50 模数标准系列(可以选用)1.75,2.25,2.75,3.5,4.5,5.5,7,9,14,18,22,28,36,45 模数标准系列(尽可能不用)3.25,3.75,6.5,11,30 上面数值以外为非标准齿轮,不要采用! 塑胶齿轮注塑后要不要入水除应力
精确测定斜齿轮螺旋角的新方法 Circular Pitch (CP)周节 齿轮分度圆直径d的大小可以用模数(m)、径节(DP)或周节(CP)与齿数(z)表示 径节P(DP)是指按齿轮分度圆直径(以英寸计算)每英寸上所占有的齿数而言 径节与模数有这样的关系: m=25.4/DP CP1/8模=25.4/DP8=3.175 3.175/3.1416(π)=1.0106模 1) 什么是「模数」? 模数表示轮齿的大小。 R模数是分度圆齿距与圆周率(π)之比,单位为毫米(mm)。 除模数外,表示轮齿大小的还有CP(周节:Circular pitch)与DP(径节:Diametral pitch)。 【参考】齿距是相邻两齿上相当点间的分度圆弧长。 2) 什么是「分度圆直径」? 分度圆直径是齿轮的基准直径。 决定齿轮大小的两大要素是模数和齿数、 分度圆直径等于齿数与模数(端面)的乘积。 过去,分度圆直径被称为基准节径。最近,按ISO标准,统一称为分度圆直径。 3) 什么是「压力角」? 齿形与分度圆交点的径向线与该点的齿形切线所夹的锐角被称为分度圆压力角。一般所说的压力角,都是指分度圆压
一级行星减速: V r 为减速机齿圈速度,向量。V c 为减速机1级行星架速度,向量。 V 1为减速机一级太阳齿(驱动齿)速度,向量。表示为: V r=ωr?Rr ; V c=ωc?Rc ; V 1=ω1?R 1 ; Rc=R1+(Rr-R1)/2 =(Rr+R1)/22V c=V r+V 1因此, 2ωc ?Rc =ωr ?Rr +ω1 ?R 1 ; --------- -----①2Rr=M?Zr ;2R1=M?Z 1 ωc ?(Zr+Z1)=ωr ?Zr +ω1 ?Z 1 ; -----------② 二级行星减速: 2级行星架固定,因此有 V r=-V 2 V 2为减速机二级太阳齿(驱动齿)速度,向量。表示为: V r=ωr ?Rr ; V 2=ω2 ?R 2 ; 但因为一级行星齿轮与二级太阳齿角速度相同。 因此, ωr ?Rr =- ω2 ?R 2= - ωc ?R 2; ----------③由齿轮啮合,同理可得: ωr ?Zr = - ωc ?Z 2; -----------------------④由②④整理得: ωr ×Zr= - (ωr ×Zr+ω1 ×Z1) ×Z2/(Zr+Z1) 整理减速比 I =ω1/ ωr =[1+(Zr+Z1)/Z2]×Zr/Z1 行走马达2级行星减速比计算 V r V c V 1 Rr Rc R 1 1级行星减速 V r V 2 Rr R 2 2级行星减速
一级行星减速: V r1为减速机齿圈上半部的速度,向量。V c1为减速机1级行星架速度,向量。 V 1为减速机一级太阳齿(驱动齿)速度,向量。 表示为: V r1=ωr?Rr 1 ; V c1=ωc1?Rc 1 ; V 1=ω1?R 1 ; Rc1=R1+(Rr1-R1)/2 =(Rr1+R1)/2 2V c1=V r1+V 1因此, 2ωc1 ?Rc 1=ωr ?Rr 1+ω1 ?R 1 ; --------- -----①2Rr1=M1?Zr 1 ;2R1=M1?Z 1 ωc1 ?(Zr1+Z1)=ωr ?Zr 1+ω1 ?Z 1 ; -----------② 二级行星减速: V r2为减速机齿圈下半部的速度,向量。 V c2为减速机2级行星架速度,向量。V 2为减速机二级太阳齿速度,向量。表示为: V r2=ωr?Rr 2 ; V c2=ωc2?Rc 2 ; V 2=ωc1?R 2 ; Rc2=R2+(Rr2-R2)/2 =(Rr2+R2)/22V c2=V r2+V 2因此, 2ωc2 ?Rc 2=ωr ?Rr 2+ωc1 ?R 2 ; ---------------③2Rr2=M2?Zr ;2R2=M2?Z 2 ωc2 ?(Zr2+Z2)=ωr ?Zr 2+ωc1 ?Z 2 ; -----------④ 三级行星减速: 3级行星架固定,因此有 V r2=-V 3V 3为减速机三级太阳齿速度,向量。表示为: V r2=ωr ?Rr 2 ; V 3=ωc2 ?R 3 ;因此, ωr ?Rr 2=- ωc2 ?R 3;-----------------------⑤ 由齿轮啮合,同理可得: ωr ?Zr 2= - ωc2 ?Z 3; ----------------------⑥ 由②④⑥整理消去ωc1和ωc2得减速比: I =–ω1/ ωr = [(Zr2+Z2)/Z3+1](Zr1+Z1)Zr2/(Z1×Z2)+Zr1/Z1 行走马达3级行星减速比计算 V r 1 V c 1 V 1 Rr1 Rc1 R 1 1级行星减速 V r2 V 3 Rr2 R 3 3级行星减速 V r2 V c2 V Rr2 Rc2 R 2 2级行星减速
第7章齿轮系的传动比计算 本章主要介绍了轮系的概念及分类;各类轮系传动比的计算方法;轮系的功用;简要介绍了设计行星轮系时,其各轮齿数和行星轮数目的选择问题;以及几种其他的行星传动机构。 7.1 基本要求 1、能正确划分轮系,能正确计算定轴轮系、周转轮系、复合轮系的传动比; 2、对轮系的主要功用有清楚的了解; 3、了解设计行星轮系时,其各轮齿数和行星轮数目的选择应满足的四个条件; 4、对其他行星齿轮传动有一般了解。 7.2重点和难点提示 本章重点: 周转轮系及复合轮系传动比的计算。 本章难点: 根据相对运动原理,将周转轮系转化为假想的“定轴轮系”的方法;如何将复合轮系正确划分为若干个基本轮系。 1、轮系及其分类
由一系列齿轮组成的传动装置称为轮系。 根据轮系运动时其中各个齿轮轴线的位置是否固定,可以将轮系分为定轴轮系、周转轮系及复合轮系三类。 (1)定轴轮系 所有齿轮几何轴线的位置在运转过程中均固定不变的轮系,称为定轴轮系。 (2)周转轮系 在运转过程中至少有一个齿轮的几何轴线位置不固定,而是绕着其它齿轮的固定轴线回转的轮系,称为周转轮系。 在周转轮系中,通常以中心轮或系杆作为运动的输入或输出构件,故又称其为周转轮系的基本构件。基本构件都是绕着同一固定轴线回转的。 根据周转轮系所具有的自由度数目的不同,周转轮系可进一步分为行星轮系和差动轮系两类。行星轮系的自由度为1,差动轮系的自由度为2 。 此外,周转轮系还可根据其基本构件的不同加以分类。设轮系中的中心轮用K表示,系 杆用H表示。若在一个轮系中,基本构件为两个中心轮和系杆H,通常称其为2K-H 型周转轮系。若一个轮系中,基本构件是三个中心轮,而行星架H只起支持行星轮的作用,不