
第24卷第4期, 2011年10月宁波大学学报(理工版)首届中国高校优秀科技期刊奖V ol.24 No.4, Oct. 2011 JOURNAL OF NINGBO UNIVERSITY ( NSEE ) 浙江省优秀科技期刊一等奖
基于CAN和TMS320F2812的永磁同步电机控制器的研究
梅义成, 俞建定*
(宁波大学信息科学与工程学院, 浙江宁波 315211)
摘要:基于永磁同步电机的矢量控制理论、CAN总线和TMS320F2812, 从硬件和软件提出了一种伺服控制器的设计方案及实施方法, 并自定义了电机控制的指令格式, 给出了具体的实施过程. 实验表明: 在这种设计架构下的伺服控制器能取得较好的效果.
关键词: CAN; TMS320F2812; 矢量控制; 永磁同步电机
中图分类号: TM351 文献标识码: A 文章编号: 1001-5132(2011)04-0101-05
近年来, 随着自动控制及加工制造业的发展, 对开放通用结构的伺服控制器呼声越来越高[1], 笔者在此提出了一种基于CAN总线和TMS320F2812的永磁同步电机(PMSM)伺服控制器的设计, 该控制器可运用于具有CAN总线接口的平台.
1PMSM及其控制理论
永磁同步电动机具有体积小、损耗低、效率高、功率密度大等特点, 但其控制难度较大; 而CAN 总线具有可靠、高速、实时等特性, 非常适合于实时控制等领域, 并且随着高速控制芯片的出现及先进算法不断被提出, 为此类问题的解决提供了越来越多的手段, 其控制性能日臻完善, 在伺服精度要求高的场合得到广泛的运用.
20世纪70年代, 德国Blaschke等人首先提出了交流电动机的矢量控制(Transvector Contrl)理论, 奠定了交流电机控制理论的基础. 其基本思想是通过坐标变换, 将空间相差120°电角度、时间相差120°相位的三相交流电, 转换为两相垂直旋转坐标系/
d q轴上的直流电, 旋转坐标系的角速度等于三相交流电的角频率. 这样1台三相交流电机在旋转坐标系上就等效为1台直流电机, 从而大大简化了电机的控制. 在忽略铁芯磁饱和、涡流、磁滞损耗和转子没有阻尼阻抗等情况下, 三相永磁同步电机在/
d q旋转坐标系下的磁链方程为:
,
,
d d d r
q q d
L i
L i
ψψ
ψ
=+
??
?=
??
(1)
其中, ,
q d
ψψ为定子磁链;
r
ψ为转子磁链; ,
d q
L L
为/
d q轴电感分量; ,
d q
i i为/
d q轴电流分量.
定子线圈上的电压方程为:
,
,
d d q d
q q d q
u p ri
u p ri
ψψω
ψψω
=?+
??
?
=++
??
(2)
其中, ,
d q
u u为/
d q轴上定子电压分量; ω为转子
角速度; r为每相定子绕组电阻; p为微分算子.
电磁转矩方程为:
(),
e n d q q d
T p i i
ψψ
=? (3)
其中,
n
p为磁极对数;
e
T为电磁转矩. 永磁同步电
机的控制方法主要有0
d
i=控制、最大转矩控制、
弱磁控制、cos1
?=控制、最大效率控制等; 其中
d
i=控制简单易行, 对于面装式永磁同步电机具
有最大转矩电流比, 且控制性能优良. 当采用
d
i=控制, 由(1)式和(3)式可得电磁转矩
e
T为:
e n r q
T p i
ψ
=, (4)
由此可见, 在0
d
i=的情况下, 通过调节q轴电流
q
i就可调节转矩或转速.
2系统硬件设计
硬件系统包括电源模块、光耦隔离及IPM逆
变模块、电流检测和位置检测模块、TMS320F2812
最小系统板. 其中, 电源模块向IPM提供300V直
收稿日期:2011?06?19. 宁波大学学报(理工版)网址: https://www.doczj.com/doc/a99775200.html,
第一作者:梅义成(1971-), 男, 安徽郎溪人, 在读硕士研究生, 主要研究方向: 嵌入式系统. E-mail: yicheng_mei@https://www.doczj.com/doc/a99775200.html, *通讯作者:俞建定(1968-), 男, 浙江宁波人, 高级实验师, 主要研究方向: 嵌入式系统. E-mail: yujianding@https://www.doczj.com/doc/a99775200.html,
102 宁波大学学报(理工版) 2011
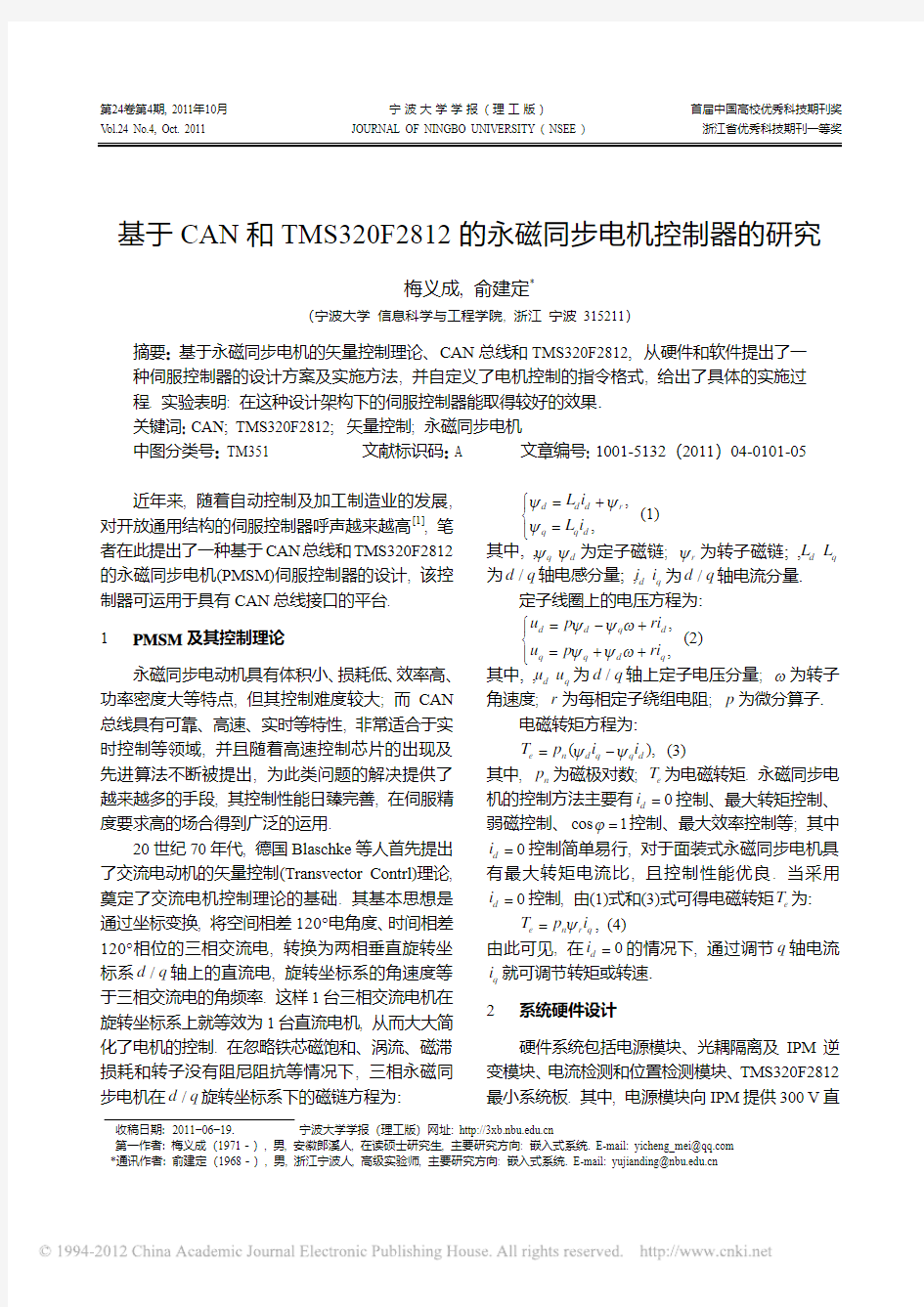
流及控制部分4路15V 独立直流, 向电流检测、位置检测及系统板提供±12V 、+5V 直流. 系统具体硬件如图1所示
.
图1 系统硬件框图
2.1 TMS320F2812及最小系统板设计
TMS320F2812是美国德州仪器生产的32位定点DSP 芯片, 具有卓越性能: 运算能力强大; 主频高达150MHz; 有2个事件管理器(EV A 、EVB)及
QEP 适合电机控制的模块; 外围中断丰富; 总线接口齐全, 有I 2C 、SPI 、CAN 、SCI 等; 具有16个
12位A/D 转换通道.
该芯片包含电机控制所需的模块齐全, 采用该芯片能大大简化电路设计, 因此系统板设计采用最小系统设计即可满足需求, 最小系统板包括
TMS320F2812、3.3V 和1.8V 电源转换芯片、30 MHz 晶振、系统仿真的JTAG 接口, 512K ×16外扩FLASH 芯片SST39VF800等, 还有CAN 总线接口芯片SN65HVD230以及一些少量电容电阻器件.
2.2 电机驱动逆变器设计
为提高电路的可靠性、简化电路设计, 缩短项目开发周期, 目前普遍选择智能功率模块(IPM)作为电机功率逆变器件. IPM 不仅将功率开关器件和驱动电路集成在一起, 而且还内藏有欠电压、过流
和过热等故障检测电路, 并可将故障检测信号输出到控制单元, 功能非常完善. 本次设计采用三菱第五代IPM 模块PM50CL1B060. PM50CL1B060输入最大电流50A, 最高电压600V , 推荐使用条件如下: 逆变电压不超过400V , 工作电流不超过
20A, 控制部分四路独立供电电压(15±1.5)V , PWM 载波频率不高于20kHz, 死区时间不低于2μs [2].
由DSP2812送来的PWM 需要光耦进行隔离.
IPM 载波频率较高, 普通光耦不能满足要求, 因此需要高速光耦, 这里选用6N137. 根据F2812的I/O
口输入输出电流要求及PM50CL1B060输入逻辑电平的要求, 设计了驱动电路, 相关原理如图2所示, 而图2仅为6路PWM 中的其中1路
.
图2 IPM 模块光耦隔离驱动电路
2.3 电流检测模块
在矢量变换中, 定子电流检测的精度和实时性是整个矢量控制系统精度的关键. 根据三相交流电流在时域的关系0a b c i i i ++=, 只需测量,a b i i , 通过c a b i i i =??得出c i . 在伺服控制和变频器中通常用霍尔电流传感器(LEM)来测量电流. 本次设计采用LA100P, LA100P 具有频带宽、精度高、线性度好的特性, 测量带宽0Hz~200kHz, 测量精度>
0.70%, 线性度>0.15%, 动态性能响应时间
在供电电压
图3 电流检测模块
第4期 梅义成, 等: 基于CAN 和TMS320F2812的永磁同步电机控制器的研究 103
±12V 时, R M 取0~50?. 由于其输出为正负电流, 而TMS320F2812电流检测端输入要求0~3V , 因此要求进行转换, 转换原理如图3所示[4].
取245R R R R ===, 可得出ADCIN1(/M M U I R =
15/)P R R R +, 当0M I =时, 调节P R , 使其静态工作点保持在1.5V , 即ADCIN1U =1.5V .
2.4 光电码盘及磁极辅助定位接口电路
在初始阶段, 伺服控制器需要知道磁极初始位置; 在工作过程中, 需要准确知道磁极在任一时刻的位置. 对于大多数永磁同步伺服电机, 一般都装有磁极辅助定位霍尔器件和精确定位的增量式光电码盘. 磁极辅助定位输出差分信号的接口分别为U+U-、V+V-、W+W-; 磁极精确定位的光电码盘输出差分信号接口分别为A+A-、B+B-、Z+Z-. 为了与TMS320F2812引脚电平匹配, 需要将双端差分信号转换为单端输出信号送到DSP 的I/O 口和QEP 模块. 此类转换芯片有很多, 如DS3486、
AM26LS32等. 3
系统软件设计
程序设计分为主程序、中断程序和电机控制指令处理等, 程序流程如图4所示
.
图4 主程序和中断程序流程图
3.1 主程序设计
主程序中完成对系统、外围中断、CAN 总线
的初始化, 设置EV A 的T1下溢中断和光电码盘起始位置捕获中断, 并对正交编码(QEP)、PID 、
CLARK 、PARK 、I_PARK 和SVPWM 模块初始化, 然后进入死循环, 在死循环中通过查询方式对
CAN 总线收发数据进行处理, 并根据电机控制指令对电机控制数据实时刷新.
3.2 中断程序设计
矢量变换在1个PWM 周期中完成, 实时性要求高, 因此放在EV A 的T1下溢中断中处理[5]. 具体过程是通过LEM 霍尔电流传感器模块, 检测驱动电机的三相电流, 经过坐标变换, 三相变两相
(CLARK 变换), 两相变旋转直流d i /q i (PARK 变换), 通过算法模块(PI)和设定的I dref 、I qref 进行比较, 输出调节量, 再经旋转直流变两相静止(I_PARK)变换, 得出两相静止电压U alfa 、U belta , 输出到空间矢量脉宽调制模块(SVPWM), 得出控制脉冲宽度的
T a , T b , T c , 然后将T a , T b , T c 写入到TMS320F2812的PWM 模块, 经过IPM 功率驱动模块, 最终得出驱动电机的三相交流电流. 系统矢量控制框图如图5所示.
另一个中断是响应码盘初始位置信号捕获, 用来定位磁极每转的起始位置.
4 基于CAN 总线的电机控制代码实现方案 一个复杂的控制系统一般是由多电机组成的,
要保持多电机协调一致工作, 可靠、高速、实时的网络成为关键. 控制器局域网络(Controller Area
Network, CAN)是由研发和生产汽车电子产品著称的德国BOSCH 公司开发的. CAN 总线有如下显著特点: 多主工作、抗干扰能力强、实时性高、组网简单以及数据传输基于数据块编码(邮箱方式). 由于CAN 总线的上述特点, 其综合性能远胜于现在常用的RS232和485通讯, 已经广泛应用于汽车、工业控制、机器人等领域.
TMS320F2812集成了CAN 总线模块, 使得较为复杂的CAN 总线使用大为简化, 按照其规定对相关的寄存器进行设定, 即可完成数据传输, 几乎
不用详细了解CAN 总线协议, 使用十分方便.
电机控制指令格式的设计及实现: CAN 每次最多传送8bit 数据, 本次设计中定义了这8bit 作为电机控制指令, 具体安排取头2bit 作为电机控
104 宁波大学学报(理工版) 2011
制代码, 后6bit 作为控制参数, 用来操作控制器完成相应的动作. 邮箱16设定为接收, 采用中断来接收电机控制指令, 存于指令队列, 在主程序死循环中依次取出指令进行处理; 邮箱1设定为发送, 根据上位机要求, 判断是否发送数据, 如发送, 则将数据写入到邮箱1, 然后启动发送(TransSignal=
1为发送信号). 原理如图6所示
.
图6 电机控制指令实现
代码实现片段如下:
for(;;) {
……
if (i= =j)//i 为读取计数, 判断指令队列是否
读完
{
QueueReadSignal=0;// 队列读取信号,
读完置0, 停止读取
} else
{
i++;
i %=50; QueueReadSignal =1; } if (QueueReadSignal ==1)
{
Uint16 MotoCodeBuff;
MotoCodeBuff=CanRecv[i].MDH .word .
HI_WORD;
switch(MotoCodeBuff)// 获取控制代码, 转向相应的操作{
case 0x0:// 电机控制指令0
……执行相应的控制操作
break;
case 0x1:// 电机控制指令1
……执行相应的控制操作
break;
case 0x2:// 电机控制指令2
……执行相应的控制操作 break;
…… }
}
if(TransSignal==1)// 定义TransSignal 发送
信号, 为1数据发送, 邮箱1设置为发送
{
ECanaRegs.CANTRS.all = 0x00000002;//
发送数据
while(ECanaRegs.CANTA.all !=
0x00000002);// 等待发送成功
ECanaRegs.CANTA.all=0x00000002;// 清
CanaRegs.CANTA.bit.TA0位
TransSignal=0; } }
interrupt void ECAN0INTA_ISR(void) // CAN 中断入口
{
j=j %50; //指令队列长度50,
j为指令读入队
图5 PMSM 矢量控制
第4期梅义成, 等: 基于CAN和TMS320F2812的永磁同步电机控制器的研究 105
列计数
CanRecv[j].MDL.all=ECanaMboxes.MBOX16. MDL.all;//读取指令低4字节
CanRecv[j].MDH.all=ECanaMboxes.MBOX16 .MDH.all;//读取指令高4字节
j++;
……
}
CanRecv[i]为定义的消息接收队列结构体, 利用该结构体, 可以对接收的消息以8位、16位或32位方式处理.
5实验结论
电机采用华大110-ST-M02030型号, 额定功率0.6kW, 额定电压220V, 额定转速3000r?min-1, 转子惯量0.33×10-3 Kg?m2, 磁极对数4, 电流环、速度环和位置环采用PI调节. 空载条件下进行速度实验: 速度设定1000r?min-1, 爬升最大值时间0.3s, 存在16%的超调, 当速度波动在2%范围内, 用时1.7s, 表明硬件设计可行. 在速度环采用先进的算法, 可减小超调, 缩短锁定时间, 达到更好的控制效果. 以上参数设定和读出都是通过CAN总线在PC机上CAN总线调试软Embeded Debug 2.0环境下完成. 6小结
设计中考虑到伺服的高性能要求, 硬件设计采用先进的控制芯片TMS320F2812、三菱第五代IPM模块; 电机控制基于矢量控制控制理论, 采用0
d
i=控制方案; 鉴于通讯网络在开放伺服系统中的重要性, 采用可靠性和实时性很高CAN总线作为通讯网络, 并探究了基于CAN总线传输的代码控制电机的方式.
参考文献:
[1]林勇强, 王勇, 冯屹朝. 开放式运动控制技术现状与发
展趋势[J]. 信息技术, 2010(5):184-186.
[2]Mitsubishi. Intelligent Power Modules PM50CL1B060
[EB/OL]. [2009-05-20]. http://www.mitsubishielectric.
com/semiconductors/content/product/powermod/powmod
/intelligentpmod/l1/pm50cl1b060_e.pdf.
[3]LEM. Current transducer LA 100-P[EB/OL]. [2009-06-
12]. https://www.doczj.com/doc/a99775200.html,/docs/products/la%20100-p%20e.
pdf.
[4]辜小兵. 基于DSP的交流伺服驱动器的设计与实现[D].
北京: 冶金自动化研究设计院, 2007.
[5]Texas Instruments Inc. PMSM3_4[EB/OL]. [2005-12-06].
https://www.doczj.com/doc/a99775200.html,/docs/toolsw/folders/print/sprc179.html.
PMSM Servo System Based on CAN Bus and TMS320F2812
MEI Yi-cheng, YU Jian-ding*
( Faculty of Information Science and Technology, Ningbo University, Ningbo 315211, China )
Abstract: Permanent Magnet Synchronous Motor (PMSM) is characterized by its robust performance. However, it is difficult to control due to its non-linear, strong coupling and other factors. Controller Area Network (CAN) features in stability, high-speed and real-time, so it is suitable for real time control. This article provides hardware and software solution for PMSM servo system based on transvector control, in which the CAN bus and TMS320F2812.A new motor control code are defined, and the implementation scheme is also given. Experiment results show that the servo controller meets the desired technical requirements.
Key words: CAN; TMS320F2812; vector control; PMSM
(责任编辑 章践立)
永磁同步电动机的分类和特点 技术2008-08-09 15:13:38 阅读178 评论0 字号:大中小一,永磁同步电动机的特点 永磁同步电动机结构简单、体积小、重量轻、损耗小、效率高,和直流电机相比,它没有直流电机的换向器和电刷等缺点。和异步电动机相比,它由于不需要无功励磁电流,因而效率高,功率因数高,力矩惯量比大,定子电流和定子电阻损耗减小,且转子参数可测、控制性能好;但它与异步电机相比,也有成本高、起动困难等缺点。和普通同步电动机相比,它省去了励磁装置,简化了结构,提高了效率。永磁同步电机矢量控制系统能够实现高精度、高动态性能、大范围的调速或定位控制,因此永磁同步电机矢量控制系统引起了国内外学者的广泛关注。 我国是盛产永磁材料的国家,特别是稀土永磁材料钕铁硼资源在我国非常丰富,稀土矿的储藏量为世界其他各国总和的4倍左右,号称“稀土王国”。稀土永磁材料和稀土永磁电机的科研水平都达到了国际先进水平。因此,对我国来说,永磁同步电动机有很好的应用前景。 二,永磁同步电动机的分类
永磁同步电动机的转子磁钢的几何形状不同,使得转子磁场在空间的分布可分为正弦波和梯形波两种。因此,当转子旋转时,在定子上产生的反电动势波形也有两种:一种为正弦波;另一种为梯形波。这样就造成两种同步电动机在原理、模型及控制方法上有所不同,为了区别由它们组成的永磁同步电动机交流调速系统,习惯上又把正弦波永磁同步电动机组成的调速系统称为正弦型永磁同步电动机(PMSM)调速系统;而由梯形波(方波)永磁同步电动机组成的调速系统,在原理和控制方法上与直流电动机系统类似,故称这种系统为无刷直流电动机(BLDCM)调速系统。 永磁同步电动机转子磁路结构不同,则电动机的运行特性、控制系统等也不同。根据永磁体在转子上的位置的不同,永磁同步电动机主要可分为:表面式和内置式。在表面式永磁同步电动机中,永磁体通常呈瓦片形,并位于转子铁心的外表面上,这种电机的重要特点是直、交轴的主电感相等;而内置式永磁同步电机的永磁体位于转子内部,永磁体外表面与定子铁心内圆之间有铁磁物质制成的极靴,可以保护永磁体。这种永磁电机的重要特点是直、交轴的主电感不相等。因此,这两种电机的性能有所不同。 三无刷直流电动机(BLDCM) 1,BLDCM研究现状
永磁同步电机弱磁控制的控制策略研究 摘要 永磁同步电机是数控机床、机器人控制等的主要执行元件,随着稀土永磁材料、永磁电机设计制造技术、电力电子技术、微处理器技术的不断发展和进步,永磁同步电机控制技术成为了交流电机控制技术的一个新的发展方向。基于它的优越性,永磁同步电机获得了广泛的研究和应用。本文对永磁同步电机的弱磁控制策略进行了综述,并着重对电压极限椭圆梯度下降法弱磁控制、采用改进的超前角控制弱磁增速、内置式永磁同步电动机弱磁控制方面进行了调查、研究。 关键词:永磁同步电机、弱磁控制、电压极限椭圆梯度下降法、超前角控制、内置式永磁同步电动机 一、永磁同步电机弱磁控制研究现状 1.永磁同步电机及其控制技术的发展 任何电机的电磁转矩都是由主磁场和电枢磁场相互作用产生的。直流电机的主磁场和电枢磁场在空间互差90°电角度,因此可以独立调节;而交流电机的主磁场和电枢磁场互不垂直,互相影响。因此,交流电机的转矩控制性能不佳。经过长期的研究,目前交流电机的控制方案有:矢量控制、恒压频比控制、直接转矩控制等[1]。 1.1 矢量控制 1971年德国西门子公司F.Blaschke等与美国P.C.Custman等几乎同时提出了交流电机磁场定向控制的原理,经过不断的研究与实践,形成了现在获得广泛应用的矢量控制系统。矢量控制系统是通过坐标变换,把交流电机在按照磁链定向的旋转坐标系上等效成直流电机,从而模仿直流电机进行控制,使交流电机的调速性能达到或超过直流电机的性能。 1.2 恒压频比控制 恒压频比控制是一种开环控制,它根据系统的给定,利用空间矢量脉宽调制转化为期望的输出进行控制,使电机以一定的转速运转。但是它依据电机的稳态模型,从而得不到理想的动态控制性能。要获得很高的动态性能,必须依据电机的动态数学模型,永磁同步电机的动态数学模型是非线性、多变量,它含有角速度与电流或的乘积项,因此要得到精确控制性能必须对角速度和电流进行解耦。近年来,研究了各种非线性控制器,来解决永磁同步电机非线性的特性。 1.3 直接转矩控制 矢量控制方案是一种很有效的交流伺服电机控制方案,但是由于该方案需要进行矢量旋转变换,坐标变换比较复杂。此外,由于电机的机械常数慢于电磁常数,矢量控制中转矩响应的速度不够迅速。针对矢量控制的上述缺点,德国学者
永磁同步电机研究 一、绪论 目前,在电动汽车电驱动系统中,永磁同步电动机(PMSM)系统以其高技、高控制精度、高转矩密度、良好的转矩平稳性及低振动噪声的特点受到国外电动汽车界的高度重视,是更具竞争力的电动汽车驱动电机系统。而且,中国拥有占世界80%储量的稀土资源,发展永磁电机作为电动汽车牵引电机具有得天独厚的优势。 PMSM:permanent magnet synchronous motor 是指根据电机的反电动势进行区分定义的电机:正弦反电势的永磁同步电机。以前采用的交流传动需要一个变速齿轮机构来将电机的转距传递到轮轴上,而采用永磁同步电机可以将电机整体地安装在轮轴上,形成整体直驱系统,即一个轮轴就是一个驱动单元,省去了一个齿轮箱 优点: (1)PMSM起动牵引力大 (2)PMSM本身的功率效率高以及功率因素高; (3)PMSM直驱系统控制性能好; (4)PMSM发热小,因此电机冷却系统结构简单、体积小、噪声小; (5)PMSM允许的过载电流大,可靠性显著提高; (6)在高速范围中电机噪声明显降低; (7)系统传动损耗明显降低,系统发热量小; (8)系统采用全封闭结构,无传动齿轮磨损、无传动齿轮噪声,免润滑油、免维护; (9)整个传动系统重量轻,簧下重量也比传统的轮轴传动的轻,单位重量的功率大; (10)由于电机采用了永磁体,省去了线圈励磁,理论可节能10%以上; (11)由于没有齿轮箱,可对装向架系统随意设计:如柔式装向架、单轴转向架,使列车动力性能大大提高。
二、电动汽车电机的性能要求: 汽车行驶的特点是频繁地启动、加速、减速、停车等。在低速或爬坡时需要高转矩,在高速行驶时需要低转矩。电动机的转速范围应能满足汽车从零到最大行驶速度的要求,即要求电动机具有高的比功率和功率密度。电动汽车电动机应满足的主要要求可归纳为如下10个方面: (1) 高电压。在允许的范围内,尽可能采用高电压,可以减小电动机的尺寸和导线等装备的尺寸,特别是可以降低逆变器的成本。工作电压由THS的274 V提高到THS B的500 V;在尺寸不变的条件下,最高功率由33 kW提高到50 kW,最大转矩由350 N"m提高到400ON"m。可见,应用高电压系统对汽车动力性能的提高极为有利。 (2)转速高。电动汽车所采用的感应电动机的转速可以达到8 000一12 000 r/min,高转速电动机的体积较小,质量较轻,有利于降低装车的装备质量。(3)质量轻,体积小。电动机可通过采用铝合金外壳等途径降低电动机的质量,各种控制装置和冷却系统的材料等也应尽可能选用轻质材料。电动汽车驱动电动机要求有高的比功率(电动机单位质量的输出功率)和在较宽的转速和转矩范围内都有较高的效率,以实现降低车重,延长续驶里程;而工业驱动电动机通常对比功率、效率及成本进行综合考虑,在额定工作点附近对效率进行优化。(4)电动机应具有较大的启动转矩和较大范围的调速性能,以满足启动、加速、行驶、减速、制动等所需的功率与转矩。电动机应具有自动调速功能,以减轻驾驶员的操纵强度,提高驾驶的舒适性,并且能够达到与内燃机汽车加速踏板同样的控制响应。 (5)电动汽车驱动电动机需要有4一5倍的过载,以满足短时加速行驶与最大爬坡度的要求,而工业驱动电动机只要求有2倍的过载就可以了。 (6)电动汽车驱动电动机应具有高的可控性、稳态精度、动态性能,以满足多部电动机协调运行,而工业驱动电动机只要求满足某一种特定的性能。 (7)电动机应具有高效率、低损耗,并在车辆减速时,可进行制动能量回收。 (8)电气系统安全性和控制系统的安全性应达到有关的标准和规定。电动汽车的各种动力电池组和电动机的工作电压可以达到300 V以上,因此必须装备高压保护设备以保证安全。
哈尔滨工业大学,电气工程系 Department of Electrical Engineering Harbin Institute of Technology 电力电子与电力传动专题课 报告 报告题目:永磁同步电机无传感器控制技术 哈尔滨工业大学 电气工程系 姓名:沈召源 学号:14S006040 2016年1月
目录 1.1 研究背景 (1) 1.2 国内外研究现状 (1) 1.3 系统模型 (2) 1.4 控制方法设计 (4) 1.5 系统仿真 (7) 1.6 结论 (8) 参考文献 (8)
1.1 研究背景 永磁同步电机具有体积小、惯量小、重量轻等优点,在各领域的应用越来越广泛。目前在永磁同步电机的各种控制算法中,使用最多的是矢量控制和直接转矩控制,而这两种控制方式都需要转子位置,但转子位置传感器的采用限制了系统使用范围。永磁同步电机控制系统大多采用测速发电机或光电码盘等传感器检测速度和位置的反馈量,这不但提高了驱动装置的造价,而且增加了电机与控制系统之间的连接线路和接口电路,使系统易于受环境干扰、可靠性降低。由于永磁同步电机无传感器控制系统具有控制精度高、安装、维护方便、可靠性强等一系列优点,成为近年来研究的一个热点。 1.2 国内外研究现状 无传感器永磁同步电机是在电机转子和机座不安装电磁或光电传感器的情况下,利用电机绕组中的有关电信号,通过直接计算、参数辨识、状态估计、间接测量等手段,从定子边较易测量的量如定子电压、定子电流中提取出与速度、位置有关的量,利用这些检测到的量和电机的数学模型推测出电机转子的位置和转速,取代机械传感器,实现电机闭环控制。 最早出现的无机械传感器控制方法可统称为波形检测法。由于同步电机是一个多变量、强耦合的非线性系统,所要解决的问题是采用何种方法获取转速和转角。目前适合永磁同步电机的最主要的无速度传感器的控制策略主要有以下几种 (1)利用定子端电压和电流直接计算出θ和ω。该方法的基本思想是基于场旋转理论,即在电机稳态运行时,定子磁链和转子磁链同步旋转,且两磁链之间的夹角相差一个功角δ,该方法适用于凸极式和表面式永磁同步电机。该方法计算方法简单,动态响应快,但对电机参数的准确性要求比较高,应用这种方法时需要结合电机参数的在线辨识。 (2)模型参考自适应(MRAS)方法。该方法的主要思想是先假设转子所在位置,利用电机模型计算出该假设位置电机的电压和电流值,并通过与实测的电压、电流比较得出两者的差值,该差值正比于假设位置与实际位置之间的角度差。当该值减小为零时,则可认为此时假设位置为真实位置。采用这种方法,位置精度与模型的选取有关。该方法应用于PMSM时有一些新的需要解决的问题。 (3)观测器基础上的估计方法。观测器的实质是状态重构,其原理是重新构造一个系统,利用原系统中可直接测量的变量,如输出矢量和输入矢量作为它的输入信号,并使输出信号在一定条件下等价于原系统的状态。目前主要存在的观测器:全阶状态观测器、降阶状态观测器、推广卡尔曼滤波和滑模观测器。其中滑模观测器有很好的鲁棒性,但其在本质上是不连续的开关控制,因此会引起系统发生抖动,这对于矢量控制在低速下运行是有害的,将会引起较大的转矩脉动。扩展卡尔曼滤波器提供了一种迭代形式的非线性估计方法,避免了对测量的微分
永磁同步电机研究的热点及发展方向 一、永磁电机作为驱动电机的优越性 基于当前汽车对驱动电机的特殊要求,不同的电机解决方案都在研究和论证过程中,其中永磁电机作为驱动电机的解决方案已经被越来越多地采用,永磁电机是在Y系列电机的基础上,将电机转子嵌入稀土钕铁硼材料而成,其作为驱动电机具有如下特点[1]。 转矩、功率密度大、起动力矩大。永磁电机气隙磁密度可大大提高,电机指标可实现最佳设计,使得电机体积缩小、重量减轻,同容量的稀土永磁电机体积、重量、所用材料可以减轻30%左右。永磁驱动电机起动转矩大,在汽车起动时能够提供有效的起动转矩,满足汽车的运行需求。 力能指标好。Y系列电机在60%的负荷下工作时,效率下降15% ,功率因数下降30%,力能指标下降40%。而永磁电机的效率和功率因数下降甚微,当电机只有20%负荷时,其力能指标仍为满负荷的80%以上。同时永磁无刷同步电机的恒转矩区比较长,一直延伸到电机最高转速的50%左右,这对提高汽车的低速动力性能有很大帮助。 高效节能。在转子上嵌入稀土永磁材料后,在正常工作时转子与定子磁场同步运行,转子绕组无感生电流,不存在转子电阻和磁滞损耗,提高了电机效率。永磁电机不但可减小电阻损耗,还能有效地提高功率因数。如在25% ~120%额定负载范围内永磁同步电机可均可保持较高的效率和功率因素。 结构简单、可靠性高。用永磁材料励磁,可将原励磁电机中励磁用的极靴及励磁线圈由一块或多块永磁体替代,零部件大量减少,在结构上大大简化。同时省去了励磁用的基电环和电刷,不但改善了电机的工艺性,而且电机运行的机械可靠性大为增强,寿命增加。转子绕组中不存在电阻损耗,定子绕组中几乎不存在无功电流,使电机温升低,这样也可以使整车冷却系统的负荷降低,进一步提高整车运行的效率。 二、永磁同步电机研究的热点 在开发高性能永磁同步电机过程中,遇到一些问题,进而成为研究的热点[2]。 1)不可逆退磁问题。如果设计或使用不当,永磁同步电机在过高(钕铁硼永磁)或过低(铁氧体永磁)温度时,在冲击电流产生的电枢反应作用下,或在剧烈的机械振动时有可能产生不可逆退磁,或叫失磁,使电机性能下降,甚至无法使用。因此,既要研究开发适用于电机制造厂使用的检查永磁材料热稳定性的方法和装置,又要分析各种不同结构型式的抗去磁能力,以便设计和制造时,采用相应措施保证永磁同步电机不失磁。
永磁同步电动机的分类和特点 技术 2008-08-09 15:13:38 阅读178 评论0 字号:大中小 一,永磁同步电动机的特点 永磁同步电动机结构简单、体积小、重量轻、损耗小、效率高,和直流电机相比,它没有直流电机的换向器和电刷等缺点。和异步电动机相比,它由于不需要无功励磁电流,因而效率高,功率因数高,力矩惯量比大,定子电流和定子电阻损耗减小,且转子参数可测、控制性能好;但它与异步电机相比,也有成本高、起动困难等缺点。和普通同步电动机相比,它省去了励磁装置,简化了结构,提高了效率。永磁同步电机矢量控制系统能够实现高精度、高动态性能、大范围的调速或定位控制,因此永磁同步电机矢量控制系统引起了国内外学者的广泛关注。 我国是盛产永磁材料的国家,特别是稀土永磁材料钕铁硼资源在我国非常丰富,稀土矿的储藏量为世界其他各国总和的4倍左右,号称“稀土王国”。稀土永磁材料和稀土永磁电机的科研水平都达到了国际先进水平。因此,对我国来说,永磁同步电动机有很好的应用前景。 二,永磁同步电动机的分类 永磁同步电动机的转子磁钢的几何形状不同,使得转子磁场在空间的分布可分为正弦波和梯形波两种。因此,当转子旋转时,在定子上产生的反电动势波形也有两种:一种为正弦波;另一种为梯形波。这样就造成两种同步电动机在原理、模型及控制方法上有所不同,为了区别由它们组成的永磁同步电动机交流调速系统,习惯上又把正弦波永磁同步电动机组成的调速系统称为正弦型永磁同步电动机(PMSM)调速系统;而由梯形波(方波)永磁同步电动机组成的调速系统,在原理和控制方法上与直流电动机系统类似,故称这种系统为无刷直流电动机(BLDCM)调速系统。 永磁同步电动机转子磁路结构不同,则电动机的运行特性、控制系统等也不同。根据永磁体在转子上的位置的不同,永磁同步电动机主要可分为:表面式和内置式。在表面式永磁同步电动机中,永磁体通常呈瓦片形,并位于转子铁心的外表面上,这种电机的重要特点是直、交轴的主电感相等;而内置式永磁同步电机的永磁体位于转子内部,永磁体外表面与定子铁心内圆之间有铁磁物质制成的极靴,可以保护永磁体。这种永磁电机的重要特点是直、交轴的主电感不相等。因此,这两种电机的性能有所不同。 三无刷直流电动机(BLDCM) 1,BLDCM研究现状 永磁无刷直流电动机与传统有刷直流电动机相比, 是用电子换向取代原直流电动机的机械换向, 并 将原有刷直流电动机的定转子颠倒(转子采用永磁体)从而省去了机械换向器和电刷,其定子电流为方波, 而且控制较简单, 但在低速运行时性能较差, 主要是受转矩脉动的影响。 引起转矩脉动的因素很多, 主要有以下原因: (1)电枢反应引起的转矩脉动
关于1.5KW永磁同步电机控制器的初步方案 基于永磁同步电机自身的结构特点,要实现对转速及位置的伺服控制,采用矢量控制算法结合SVPWM技术实现对电机的精确控制,通过改变电机定子电压频率即可实现调速,为防止失步,采用自控方式,利用转子位置检测信号控制逆变器输出电流频率,同时转子位置检测信号作为同步电机的启动以及实现位置伺服功能的组成部分。 矢量控制的基本思想是在三相永磁同步电动机上设法模拟直流 电动机转矩控制的规律,在磁场定向坐标上,将电流矢量分量分解成产生磁通的励磁电流分量id和产生转矩的转矩电流iq分量,并使两分量互相垂直,彼此独立。当给定Id=0,这时根据电机的转矩公式可以得到转矩与主磁通和iq乘积成正比。由于给定Id=0,那么主磁通就基本恒定,这样只要调节电流转矩分量iq就可以像控制直流电动机一样控制永磁同步电机。 根据这一思想,初步设想系统的主要组成部分为:主控制板部分,电源及驱动板部分,输入输出部分。 其中主控制板部分即DSP板,根据控制指令和位置速度传感器以及采集的电压电流信号进行运算,并输出用于控制逆变器部分的控制信号。 电源和驱动板部分主要负责给各个部分供电,并提供给逆变器部分相应的驱动信号,以及将控制信号与主回路的高压部分隔离开。 输入输出部分用来输入控制量,显示实时信息等。
原理框图如下: 基本控制过程:速度给定信号与检测到的转子信号相比较,经过速度控制器的调节,产生定子电流转矩分量Isq_ref,用这个电流量作为电流控制器的给定信号。励磁分量Isd_ref由外部给定,当励磁分量为零时,从电机端口看,永磁同步电机相当于一台他励直流电机,磁通基本恒定,简化了控制问题。另一端通过电流采样得到三相定子电流,经过Clarke变换将其变为α-β两相静止坐标系下的电流,再通过park 变换将其变为d-q两相旋转坐标系下电流Isq,Isd,分别与两个调节器的参考值比较,经过控制器调节后变为电压信号Vsd_ref和Vsq_ref,再经过park逆变换,得到Vsa_ref和Vsb_ref作为SVPWM的控制信
1.课题背景及意义 1.1课题研究背景、目的及意义 近年来,随着电力电子技术、微电子技术、微型计算机技术、传感器技术、稀土永磁材料与电动机控制理论的发展,交流伺服控制技术有了长足的进步,交流伺服系统将逐步取代直流伺服系统,借助于计算机技术、现代控制理论的发展,人们可以构成高精度、快速响应的交流伺服驱动系统。因此,近年来,世界各国在高精度速度和位置控制场合,己经由交流电力传动取代液压和直流传动[1][2]。 二十世纪八十年代以来,随着价格低廉的钕铁硼(REFEB)永磁材料的出现,使永磁同步电机得到了很大的发展,世界各国(以德国和日本为首)掀起了一股研制和生产永磁同步电机及其伺服控制器的热潮,在数控机床、工业机器人等小功率应用场合,永磁同步电机伺服系统是主要的发展趋势。永磁同步电机的控制技术将逐渐走向成熟并日趋完善[3]。以往同步电机的概念和应用范围己被当今的永磁同步电机大大扩展。可以毫不夸张地说,永磁同步电机已在从小到大,从一般控制驱动到高精度的伺服驱动,从人们日常生活到各种高精尖的科技领域作为最主要的驱动电机出现,而且前景会越来越明显。 由于永磁同步电机具有结构简单、体积小、效率高、转矩电流比高、转动惯量低,易于散热及维护等优点,特别是随着永磁材料价格的下降、材料的磁性能的提高、以及新型的永磁材料的出现,在中小功率、高精度、高可靠性、宽调速范围的伺服控制系统中,永磁同步电动机引起了众多研究与开发人员的青睐,其应用领域逐步推广,尤其在航空航天、数控机床、加工中心、机器人等场合获得广泛的应用[4][5]。 尽管永磁同步电动机的控制技术得到了很大的发展,各种控制技术的应用 - 1 -
永磁式同步电机的特点及其分类 永磁式同步电动机结构简单、体积小、重量轻、损耗小、效率高,和直流电机相比,它没有直流电机的换向器和电刷等缺点。和异步电动机相比,它由于不需要无功励磁电流,因而效率高,功率因数高,力矩惯量比大,定子电流和定子电阻损耗减小,且转子参数可测、控制性能好;但它与异步电机相比,也有成本高、起动困难等缺点。和普通同步电动机相比,它省去了励磁装置,简化了结构,提高了效率。永磁同步电机矢量控制系统能够实现高精度、高动态性能、大范围的调速或定位控制,因此永磁同步电机矢量控制系统引起了国内外学者的广泛关注。 近年来,随着永磁材料性能的不断提高和完善,特别是钕铁硼永磁的热稳定性和耐腐蚀性的改善和价格的逐步降低以及电力电子器件的进一步发展,加上永磁电机研究开发经验的逐步成熟,经大力推广和应用已有研究成果,使永磁电机在国防、工农业生产和日常生活等方面获得越来越广泛的应用。正向大功率化(高转速、高转矩) 、高功能化和微型化方面发展。目前,稀土永磁电机的单台容量已超过1000KW,最高转速已超过300000r/min ,最低转速低于0.01r/min ,最小电机的外径只有 0.8mm,长1.2mm 我国是盛产永磁材料的国家,特别是稀土永磁材料钕铁硼资源在我国非常丰富,稀土矿的储藏量为世界其他各国总和的4 倍左右,号称“稀土王国”。稀土永磁材料和稀土永磁电机的科研水平都达到了国际先进水平。因此,对我国来说,永磁同步电动机有很好的应用前景。充分发挥我国稀土资源丰富的优势,大力研究和推广应用以稀土永磁电机为代表的各种永磁电机,对实现我国社会主义现代化具有重要的理论意义和实用价值。 永磁同步电动机的转子磁钢的几何形状不同,使得转子磁场在空间的分布可分为正弦波和梯形波两种。因此,当转子旋转时,在定子上产生的反电动势波形也有两种:一种为正弦波;另一种为梯形波。这样就造成两种同步电动机在原理、模型及控制方法上有所不同,为了区别由它们组成的永磁同步电动机交流调速系统,习惯上又把正弦波永磁同步电动机组成的调速系统称为正弦型永磁同步电动机(PMSM)
永磁同步电动机设计 一课题研究背景[1] 我国电动机保有量大,消耗电能大,设备老化,效率较低,永磁同步电动机(PMSM)具有体积小、效率高、功率因数高、起动力矩大、力能指标好、温升低等特点。永磁同步电机的运行原理与电励磁同步电机相同,但它以永磁体提供的磁通代替后者的励磁绕组励磁,使电机结构更为简单。近年来,永磁材料性能的改善以及电力电子技术的进步,推动了新原理、新结构永磁同步电机的开发,有力地促进了电机产品技术、品种及功能的发展,某些永磁同步电机已形成系列化产品,其容量从小到大,目前已达到兆瓦级,应用范围越来越广;其地位越来越重要,从军工到民用,从特殊到一般迅速扩大,不仅在微特电机中占优势,而且在电力推进系统中也显示出了强大的生命力。永磁同步电机以其效率高、比功率大、结构简单、节能效果显著等一系列优点在工业生产和日常生活中逐步得到广泛应用。尤其是近年来高耐热性、高磁性能钕铁硼永磁体的成功开发以及电力电子元件的进一步发展和改进,稀土永磁同步电机的研究开发在国内外又进入了一个新的时 期,在理论研究和应用领域都将产生质的飞跃,目前正向超高速、高转矩、大功率、微型化、高功能化方向发展。 二研究目的和意义 熟练掌握永磁同步电机的特点和机构,性能,掌握永磁同步电机的电磁计算,会设计永磁同步电机。
三研究内容 1 永磁同步电动机转子结构形式[2] (1)外贴式转子结构 永磁体贴到转子外表面上,径向充磁;永磁体也可以嵌入转 子表面内,贴于转子表面的转子结构制造容易,常用于矩形 波同步电动机和恒功率运行的正弦波永磁同步电动机中。 (2)内置式转子结构 1)径向式结构;漏磁系数小,永磁体轴向嵌入磁体槽中,通过磁漆桥限制漏磁通,转子机械强度高。
高效永磁同步电动机设计技术研究
目录 1、基本情况及背景介绍 (2) 2、高效永磁同步电动机关键技术的研究 (3) 2.1优化转子磁路结构,提高电机的可靠性 (3) 2.2永磁电机防退磁技术研究 (5) 2.3漏磁系数准确计算的研究 (7) 2.4稀土永磁材料的高温退磁特性及应用技术的研究 (10) 2.5稀土永磁材料的剩磁测试技术的研究 (14) 2.6电机的起动性能 (16) 2.7失步转矩倍数 (17) 2.8其它性能指标 (18)
1、基本情况及背景介绍 稀土永磁是一种高性能的功能材料,它的高剩磁密度、高矫顽力、高磁能积等优异磁性能特别适合于制造电机。用它制成的永磁同步电机,不需要用以产生磁场的无功励磁电流,可显著提高功率因数,减少定子电流和定子电阻损耗。在稳定运行时没有转子电阻损耗,使电机温升有较大裕度,从而可将风扇减小甚至不安装风扇,以减少风摩损耗提高电机效率。与普通的电励磁同步电动机相比,不需要用以产生磁场的励磁绕组和直流励磁电源,取消了容易出问题的集电环和电刷装置,成为无刷电机,运行可靠,又效率提高。因此,国内外都投入大量人力物力从事高效钕铁硼永磁电机的研制开发。 相对于异步电机,永磁同步电动机(PMSM)具有体积小、功率密度高等优点,效率比同规格的感应异步电机高2~8%。我国稀土永磁资源储量占世界储量的80%,发展永磁电机具有得天独厚的优势。 早在1980年,我国有关高校及科研院所就开始从事高效永磁电动机的研制开发,先后研制开发出多种类型电动机的样机,技术水平参差不齐,还存在着转子磁路单一、永磁材料可能退磁、测试和制造工艺复杂等问题,性能价格比不够理想,价格偏高。 为了充分发挥钕铁硼永磁材料的优异磁性能,针对钕铁硼永磁电动机在磁、电、机、热等方面的特点,进行技术集成和创新,特别对转子磁路结构、钕铁硼永磁材料的热稳定性做了深入研究,并应用于产品开发过程,提高其效率、性价比,可靠性(主要指不退磁),扩大应用领域,为把稀土资源优势转化为经济优势作贡献。
硕士学位论文 二0一五 年 六 月 作者姓名 指导教师 学科专业 控制工程 电动汽车用永磁同步电机控制系统设计 Design of permanent magnet synchronous motor control system for electric vehicle
摘要 本文在开始先介绍了研究电动汽车的背景及其意义,并介绍了电动汽车在国内外的发展现状,然后从电动汽车的燃油经济性,驱动性,安全性及舒适度,三个方面分析了电动汽车比其他燃料汽车存在的优越性。电动机是电动汽车的核心部件,本文中从其驱动方式把电动机分为四大类,直流有刷电动机,永磁同步电动机,永磁无刷直流电动机和开关磁阻电动机。本章从工作原理与性能方面分析了,这四种电动机各存在的优点和不足。从中得出永磁同步电动机是电动汽车比较理想的选择。本文刚开始介绍了永磁同步电动机PMSM的三种不同的控制方式,恒压频比控制,矢量控制,直接转矩控制,并从三者之间比较得出,PMSM采用直接转矩控制DTC的方式有着比其他两者更好的稳定性。 随后从永磁同步电动机PMSM的结构及其特点,分析了其优越性,并建立数学模型,根据空间矢量坐标关系推导出PMSM的在各坐标系下DTC的原理。本章分析了定子磁链与电磁转矩的估算和滞环控制,通过其原理研究了开关表控制的方式,并对PMSM的直接转矩控制DTC的Matlab/Simulink仿真,最终得出了DTC 较其它控制方式的稳定性。 其次分析了永磁同步电机PMSM的直接转矩控制DTC存在的诸多缺点,并提出基于SVM技术的SVPWM的控制方式,即空间矢量调制DTC控制策略,通过Matlab/Simulink仿真,得出SVPWM比PMSM DTC有着更好的稳定性。 TI公司推出的TMS320F2812 DSP芯片的控制系统设计,从硬件电路的设计和软件的设计,两个方面研究了该芯片。DSP硬件方面包含了智能模块的自保护特性,并设计了检测电路,保护电路,驱动电路和CAN通信等模块,软件系统方面分析了,其初始化流程图,接收流程图等。 关键词:永磁同步电机;直接转矩控制;DSP;SVPWM
永磁同步电机及其控制技术的研究现状 A直流电机、异步电机、同步电机三大电机系统中,衣磁同步电机为其性能优良和结构多样,在工农业生产制造.日常生活以及航空航天事业等领域中得到广泛的应用。为使得电机有较好的控制性能,需要便用变频器时永卓同步电动机进行驱动和控制.因此,研究如何在通用变额器上实现永嵐同步电动机矢呈控制具有非常重硬的实用价值: (1)永磁同步电机矢量控制系统是一种髙性能的交流调速系统.由于永礎同步电机结构简单、体积小、重量轻、效率高、过载能力大、转动惯虽小以及转矩脉动小零优点,并且利用矢量控制思想*永磁同步电机可以便得输出转矩随定了电流线性变化,永磁同步电机矢畐拎制系统可以达到优越的控制性能⑴. (2)我国是世界上星早利用磁的国家,早在公元前2500年前后就己经有相黄天然磁石的记载◎同时,水磁材料产业的发展与电子信息、通信技术、矿业、航空航天、交通运输等行业密切相关.具有璽宴的战略意义I*】. (3)殺电子技术的发脱促进了数孑技术在调速系统屮的应用,配合髙效软件可提供较好的灵活性和控制性能"电机控制系统的数了化进程是实现现代调速系统发展的方向之一。相比了:模拟控制,数字控制更易于实现先进控制饺毎同时数字控制系统的硬件成本低、结构简帕且高效节能固° 人类最早发明的电机是利用天然磁铁建立磁场的.1821年9月.法拉第发现通电匕线在雄场中会受到力的作用,他第一次实现了把电能转化为机械能.从而在实骡峑建立了堀初的电机模型,被认为是世界上第一台电机° 1831年*在发现电磁感应现象之后不典,法拉第利用电磁感应原理发明了111界上弟一台真正恿义上的电机——法捡第岡盘发电机?】旳2年,斯特金发明了换向器,制件了世界上第一台能够连续运动的旌转电机.1845年.英国的惠斯通用电磁铁代替永久磴铁,并取得了乍利权,这是增强发电机输岀功率的一个重雯措施,1967年.锣诂永磁材料的岀现,开创『永磁电机发展的新纪元. 随着科学技术的发展,各类电机不审问世,电机的种类越来越多。上要分为白漩电机和交流电机两大樂而交流电机主耍分为并步电机和同步qi动机届步电机结构简单,造价低廉且维护较少,可应用于衽环境恶劣的场合,但也存在不少缺点,运转过程中电
研究永磁同步电机论文的阅后感 09021003-李国豪-2010302261 为了完成老师布置的任务,首先,我上网查找了一些有关同步电机的基本资料。发现对同步电机的研究主要集中在永磁同步电机的研究。其研究历史如下: 早期对永磁同步电机的研究主要为固定频率供电的永磁同步电机运行特性的研究,特别是稳态特性和直接起动性能的研究。永磁同步电动机的直接起动是依靠阻尼绕组提供的异步转矩将电机加速到接近同步转速,然后由磁阻转矩和同步转矩将电机牵入同步。 上个世纪八十年代国外开始对逆变器供电的永磁同步电动机进行深入的研究。逆变器供电的永磁同步电机与直接起动的永磁同步电机的结构基本相同,但在大多数情况下无阻尼绕组。 随着对永磁同步电机调速系统性能要求的不断提高,需要设计出高效率、高力矩惯量比、高能量密度的永磁同步电机,G.R.Slemon等人针对调速系统快速动态性能和高效率的要求,提出了现代永磁同步电机的设计方法。 随着微型计算机技术的发展,永磁同步电动机矢量控制系统的全数字控制也取得了很大的发展。D.Naunin等研制了一种永磁同步电动机矢量控制系统,采用了十六位单片机8097作为控制计算机,实现了高精度、高动态响应的全数字控制。 永磁同步电动机矢量控制系统转速控制器大多采用比例积分(PI)控制。1991年,R.B.Sepe首次在转速控制器中采用自校正控
制。早期自适应控制主要应用于直流电机调速系统。国立台湾大学刘天华等首次将鲁棒控制理论应用于永磁同步电动机伺服驱动。现代控制理论中的各种鲁棒控制技术能够使控制系统在模型和参数变化时保持良好的控制性能。因此,将各种鲁棒控制技术运用于电机调速领域,可以大大提高调速系统的性能。在这方面,运用的较为成功的控制技术主要有:自适应控制、变结构控制、参数辨识技术等。 通过对电机参数变化进行在线辨识,并运用辨识的参数对调速系统进行控制,也能够提高控制系统的鲁棒性。随着人工智能技术的发展,智能控制己成为现代控制领域中的一个重要分支,电气传动控制系统中运用智能控制技术也已成为目前电气传动控制的主要发展方向,并且将带来电气传动技术的新纪元。目前,实现智能控制的有效途径有三条:基于人工智能的专家系统(ExpertSystem);基于模糊集合理论(FuzzyLogic)的模糊控制;基于人工神经网络(Artificia1NeuralNetwork)的神经控制。 从上述研究历史可以发现,随着时代的发展,对电机的研究已经从过去研究其运行特性从而设计制造电机发展到现在研究电机的控制技术。因此,我去学校图书馆的网上数据库的相关期刊去查找永磁同步电机以及其控制系统的研究的相关论文。 从《High Starting Performance Synchronous Motor》等论文可以得知,同步电机具有以下特点:1、体积小、质量轻。2、功率因数高、效率高,节约能源。3、不需要励磁电流,可以显著提高功率因数,减小定子铜耗。4、磁通密度高、动态响应快。5、可靠性高。
基于TMS320LF2406的交流永磁同步电机控制器设计 介绍了一种交流永磁同步电机全数字伺服控制器的软硬件组成及设计方案,系统采用TI DS P TMS320LF2406组成核心控制电路,以智能功率模块构成主电路,具有通用紧凑的系统结构. 1 引言 近年来,交流伺服系统的应用已经十分广泛,特别是在要求高精度、高响应的应用场合,交流永磁同步电机伺服系统具有非常明显的优势。随着微电子技术和功率电子技术的飞速发展,在交流伺服系统中已经采用了各种新颖的器件如数字信号处理器(DSP)、智能功率模块(I PM)等,使伺服控制器从模拟控制转向数字控制,而数字控制在精度、可靠性以及灵活性等方面的优势,也促使交流伺服系统向全数字化、智能化、小型化方向发展。 本文研究了采用TI公司的新一代低功耗、高速DSP芯片TMS320LF2406的全数字交流伺服控制器的软硬件设计和控制方案。TMS320LF2406采用3.3V供电,在性能上有了进一步的增强,不仅具有更强的实时运算能力,并且集成了丰富的电机控制外围电路,特别适用于对控制器体积、性能要求较高的应用。 2 交流永磁同步电机矢量控制 交流永磁同步电机在磁路不饱和,磁滞及涡流的影响忽略不计,定子三相电流产生的空间磁势及永磁转子的磁通分布呈正弦波形状的条件下,若不考虑转子磁场的凸极效应,即L d=Lq=L,可得其在d_q坐标系上的状态方程为[1]: 其中R:绕组等效电阻;L:等效电感;p:微分算子(d/dt);Np:电机磁极对数;ωm:转子机械角速度;ψf:转子永磁效应对应的每对磁极磁通;Tl:折算到电动机轴上的总负载转矩;J:折算到电机轴 上的总转动惯量。 式(1)中系数矩阵含有变量ωm,所以可知永磁同步伺服电机是一种非线性的控制对象,且d轴电流分量id和q轴电流分量iq之间存在耦合作用,为使永磁同步电动机具有和直流电动机一样的控制性能,通常采用id≡0的线性化解耦控制,即在初始定向A相绕组和d轴重合之后, 始终控制电枢电流矢量位于q轴上,和转子磁链矢量正交。然而从状态方程可以看出,d_q坐标系上的状态变量存在着耦合关系,即vd不仅依赖于id,同时和iq也有关系,这给控制器的设计带来了很大的问题,在通常的模拟方式交流伺服控制器中,只能通过增大电流控制器的增益实现电流矢量的快速跟踪,得到近似线性化的解耦控制效果,而对于全数字化交流伺服控制器,如果知道交流永磁同步电机的感应反电势常数、电枢绕组的电感值,则可以通过完全去耦控制实现精确地线性化控制。现假设感应反电势常数、电枢绕组的电感值已知,那
浅析永磁同步电机控制策略 【摘要】近年来,永磁同步电机凭借其体积小、损耗低、效率高等优点,被广泛应用于各种生产实践中。与此同时,对永磁同步电机的控制研究也得到了广泛的重视。本文就永磁同步电机的控制策略做出简单阐述,对比其优缺点,分析永磁同步电机控制侧率的发展方向。 【关键词】永磁同步电机;恒压频比开环控制;矢量控制;直接转矩控制 1.引言 近年来,随着电力电子技术、新型电机控制理论和稀土永磁材料的快速发展,永磁同步电动机得以迅速的推广应用。永磁同步电动机具有体积小,损耗低,效率高等优点,在节约能源和环境保护日益受到重视的今天,对其研究就显得非常必要。因此。这里对永磁同步电机的控制策略进行综述,并介绍了永磁同步电动机控制系统的各种控制策略发展方向。 2.永磁同步电机的数学模型 永磁同步电机(PMSM)的永磁体和绕组,绕组和绕组之间的相互影响,电磁之间的关系十分复杂,由于磁路饱和等非线性因素,建立精确的数学模型是很困难的。为了简化PMSM的数学模型,我们通常作如下的假设: (1)磁路不饱和,电机电感不受电流变化影响,不计涡流和磁滞损耗; (2)忽略齿槽、换相过程和电枢反应的影响; (3)三相绕组对称,永久磁钢的磁场沿气隙周围正弦分布; (4)电枢绕组在定子内表面均匀连续分布; (5)驱动二极管和续流二极管为理想元件; (6)转子磁链在气隙中呈正弦分布。 对于永磁同步电机来说,即用固定转子的参考坐标来描述和分析其稳态和动态性能是十分方便的。此时,取永磁体基波励磁磁场轴线即永磁体磁极的轴线为d轴,而q轴逆时针方向朝前90o电角度。d轴与参考轴A之间夹角为。图1为永磁同步电机(PMSM)矢量图。 图1 PMSM空间向量图 Fig.1 Space vector diagram of PMSM
永磁同步电机控制系统研究 【摘要】由于使用场合的特殊性,电梯驱动用电机应该具有振动小、噪声低、起动电流小、有足够的起动转矩和运行平稳等性能要求。永磁同步电机具有转矩纹波小,转速平稳,动态响应快速准确,过载能力强等优点,不仅能满足以上要求,而且可以显著提高功率因数,降低损耗,提高效率,长期运行,可以起到降本增效的作用。 【关键词】永磁同步电机;电梯驱动;弱磁控制 0.引言 正弦波永磁同步电动机可根据多种矢量控制方法来构成变频调速系统,实现高性能、高精度的传动,在动态响应要求高的场合其应用前景尤其看好。永磁同步电机的矢量控制,也是基于磁场定向的控制策略,由于转子上的永磁体所提供的磁场恒定,加之其结构和参数各异,相应的控制方法也有所不同。这些控制方法主要有:id=0(转子磁链定向)控制、cosφ=1控制、总磁链恒定控制、最大转矩/电流控制、最大输出功率控制、直接转矩控制等。它们各具特点,如cosφ=1控制可以降低与之匹配的变频器容量,恒磁链控制可以增大电动机的最大输出转矩等。而id=0控制最为简单,它的基本思想是通过控制逆变器使三相定子的合成电流(磁动势)超前转子位置90°(电角度),则电机的电磁转矩只和定子电流幅值成正比,即控制定子电流的幅值,就能很好地控制电磁转矩。本文采用id=0与弱磁控制相结合的控制方式。 1.控制原理 1.1PMSM数学模型 永磁同步电机具有正弦形的反电动势波形,其定子电压、电流也应为正弦波。假设电动机是线形的,参数不随温度等变化,忽略磁滞/涡流损耗,转子无阻尼绕组,那么基于转子坐标系(d-q轴系)中的永磁同步电动机定子磁链方程为: Ψ=Li+Ψ Ψ=L·i 式中:Ψ为转子磁钢在定子上的耦合磁链;L、L为永磁同步电动机的直、交轴主电感;i、i为定子电流矢量的直、交轴分量。 PMSM定子电压方程: u=ri+pΨ-ωΨ
基于SVPWM的永磁同步电机控制系统的仿真随着电动机在社会生产中的广泛应用,由于永磁同步电机具有结构简单、体积小、效率高、转矩电流比高、转动惯量低,易于散热及维护等优点,特别是随着永磁材料价格的下降、材料的磁性能的提高、以及新型的永磁材料的出现,在中小功率、高精度、高可靠性、宽调速围的伺服控制系统中,永磁同步电动机引起了众多研究与开发人员的青睐,其应用领域逐步推广,尤其在航空航天、数控机床、加工中心、机器人等场合已获得广泛的应用。我国制作永磁电机永磁材料的稀土资源丰富,稀土资占全世界的80%以上,发展永磁电机具有广阔的前景。 第一章永磁同步电机的矢量控制原理 1.1 永磁同步电机控制中应用的坐标系 交流电机的数学模型具有高阶次,多变量耦合,非线性等特征,难以直接应用于系统的设计和控制,与直流电机单变量,自然解耦和线性的数学模型相比较,交流电机显得异常复杂。因此需要通过适当的转换,将交流电机的控制变换为类似直流电机的控制将大大简化交流电机控制的复杂程度。 永磁同步电机矢量控制的基本思想是把交流电机当成直流电机来控制,即模拟直流电机的控制特点进行永磁同步电机的控制。为简化感应电机模型,可将电机三相绕组电流产生的磁动势按平面矢量的叠加原理进行合成和分解,使得能够用两相正交绕组来等效实际电动机的三相绕组。由于两相绕组的正交性,变量之间的耦合大大减小。 1.1.1系统中的坐标系 1)三相定子坐标系(U-V-W坐标系) 其中三相交流电机绕组轴线分别为U、V、W,彼此之间互差120度空间
电角度,构成了一个U-V-W三相坐标系。空间任意一矢量在三个坐标上的投影代表了该矢量在三个绕组上的分量。 2)两相定子坐标系(α-β坐标系) 两相对称绕组通以两相对称电流也能产生旋转磁场。对于空间的任意一矢量,数学描述时习惯采用两相直角坐标系来描述,所以定义一个两相静止坐标系,即α-β坐标系。它的轴α和三相定子坐标系的A轴重合,β轴逆时针超前α轴90度空间电角度。由于α轴固定在定子A相绕组轴线上,所以α-β坐标系也是静止坐标系。 3)转子坐标系(d-q坐标系) 转子坐标系d轴位于转子磁链轴线上,q轴逆时针超前d轴90度空间电角度,该坐标系和转子一起在空间上以转子角速度旋转,故为旋转坐标系。对于同步电动机,d轴是转子磁极的轴线。 矢量控制中用到的变换有:将三相平面坐标系向两相平面直角坐标系的转换(Clarke 变换)和将两相静止直角坐标系向两相旋转直角坐标系的变换(Park变换)。 1.1.2 由三项平面坐标系向两相平面坐标系(Clarke变换) 三相同步电动机的集中绕组U、V、W的轴线在与转子垂直的平面分布如上图所示,轴线依次相差120°,可将每相绕组在气隙中产生的磁势分别记为:Fu、Fv、Fw。由于Fu、Fv、Fw不会在轴向上产生分量,所以可以把气隙的磁场简化为一个二维的平面场。简单起见,可以U为α轴,由α起逆时针旋转90°作β轴,建立起二维坐标系,用此两相坐标系(α-β)产生的磁动势来等效三相静止坐标系(U-V-W)产生的磁动势。如图1.1所示。