实验六光学传感三维面形测量
一、实验目的
通过本实验了解投影光栅相位法的基本原理;了解一种充分发挥计算机特长的条纹投影相位移处理技术。对于非接触测量有一定的感性认识。
二、实验器材
LD激光器、偏振片、光纤光源、分光平片、准直透镜、正弦光栅、扩束透镜、目标物、白屏、步行电机(配有电机控制器)、配有镜头的CCD以及干板架、支杆、套筒、导轨等辅助器件。
三、实验原理
投影光栅相位法是三维轮廓测量中的热点之一,其测量原理是光栅图样投射到被测物体表面,相位和振幅受到物面高度的调制使光栅像发生变形,通过解调可以得到包含高度信息的相位变化,最后根据三角法原理完成相位---高度的转换。根据相位检测方法的不同,主要有Moire轮廓术、Fourier变换轮廓术,相位测量轮廓术,本实验就是采用了相位测量轮廓术。
相位测量轮廓术采用正弦光栅投影相移技术。基本原理是利用条纹投影相移技术将投影到物体上的正弦光栅依次移动一定的相位,由采集到的移相变形条纹图计算得到包含物体高度信息的相位。
基于相位测量的光学三维测量技术本质上仍然是光学三角法,但与光学三角法的轮廓术有所不同,它不直接去寻找和判断由于物体高度变动后的像点,而是通过相位测量间接地实现,由于相位信息的参与,使得这类方法与单纯基于光学三角法有很大区别。
四、实验装置
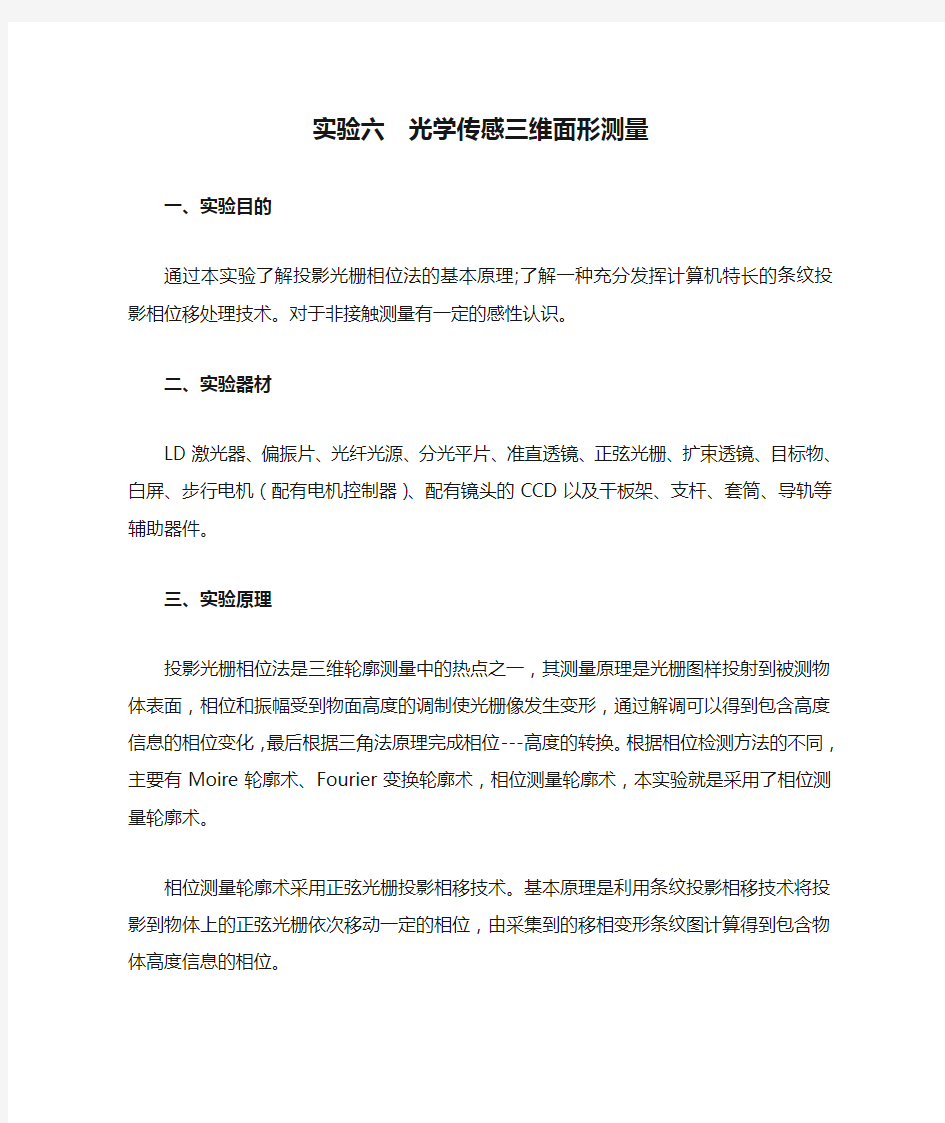
所需器件包括:LD激光器、偏振片、光纤光源、分光平片、准直透镜、正弦光栅、扩束透镜、目标物、白屏、步行电机(配有电机控制器)、配有镜头的CCD以及干板架、支杆、套筒、导轨等辅助器件。下图给出整个实验系统光路图。
五、实验步骤
1、光路调整,依照上图所需光路调整,使得暗箱内光学器件光轴平行
2、使用SControllerV2.3.1与Ok Demo确认步进电机与CCD正常工作
3、数据标定:
①运行3DMEASUREMENT,进入系统操作-数据采集界面,打开步进电机(打开电移台)与CCD 采集(打开图像卡),将平移台位置归零。
②设置“移动步长”为10mm,点击“设置存放位置”,选择合适的位置存放图像。
③将白色挡光板放入暗香内,关闭白光光源,打开LD光源,在CCD图像上可见1白色光点,点击“获取图像”,在指定文件夹内得到image00_0
④打开白光开关,关闭LD开关,在CCD图像中得到对比度清晰的条纹像,选择相位+1,点击“获取图像”,得到image00_1
⑤继续选择相位+1,,并保存图像,得到image00_2、image00_3、image00_4、image00_5
⑥点击步进电机“移动一步”,此时相位清0,步数+1,重复③④⑤步,得到image01_0到image01_5
⑦重复第6步2次,得到image02_X、image03_X系列图片,从image00_0到image03_5共计24张图片
⑧进行标定:点击菜单“系统操作→系统标定”项,出现图2.3.4所示对话框。
设置“标定面数”、“相移次数”、“移动间隔”。标定面数是实验过程中实际采集的位置个数;相移次数是在每一标定位置的相移次数;移动间隔是实验过程中标定面每次移动的距离(mm),应和平移台控制区“移动步长”一致。然后点击“开始标定”按钮,出现图 2.3.4对话框,选择标定图像的存储路径后,找到已经存储的图片,选择image00_0.bmp,点击“打开”按钮,开始标定。最终得到标定文件biaoding.txt,存放在C盘根目录下。
4、数据处理模块
将目标物放入暗箱内,凹陷的一侧面对光路,重复上述①至⑤步,得到1组6张图片用于目标物轮廓恢复
运行“文件->打开”目标物存储文件夹,会得到下图所示图片,在图片上点击鼠标左键选择处理区域,所选区域一定包含质心,如下图所示。
(4) 再点击菜单中“系统操作→数据处理”项,出现如图所示的处理框:
在下拉菜单中选择相移次数“5”,然后依次点击“数据处理开始”、“计算截断相位”、
“相位展开”、“减掉参考面”及“高度信息恢复”按钮,进行三维重建,重建结束后,点击“OK”按钮退出数据处理对话框。
重建结束后,可以选择菜单“处理结果”中的命令,查看每一步计算结果。如果测量对象是平行于参考平面的平面,可查看“处理结果”中的结果报告,获得平面的最大值、最小值、平均值及均方差。
重建结束后,可以选择菜单“图形操作”中的命令,对图像显示区显示的图像进行放大、
拉线、三维显示以及平面显示操作,每次操作后点击平面显示按钮,显示的图像可回到灰度平面显示状态。进行图像放大操作后,如要回到原始大小,点击鼠标右键即可。
点击保存命令,将得到的重建图像保存为bmp图像。
基于结构光的微小物体三维测量系统的设计及应用针对微小物体的三维轮廓测量是现代三维形貌测量的一个重要分支领域。自从上世纪六十年代在国外被首次提出后,国内外研究学者经过几十年的不断研究和发展,与其相关的测量技术与测量设备也获得了高速发展,进入21世纪以后,其被广泛应用于缺陷检测、精密制造、虚拟现实(VR)、机器视觉、医疗工程、影音游戏、三维打印以及现代教育等众多领域。但与国外现有的测量技术与设备相比较,国内目前还处在相对落后的局面。因此,研制出测量精度高、测量速度快、微型化以及更加智能化的微小物体三维轮廓测量系统迫在眉睫。 根据上述情况,本文针对微小物体的三维轮廓测量从两个方向展开研究。一方面,基于正弦光栅条纹投影和光学三角法的三维测量方法进行研究。另一方面,着眼于以体视显微镜和双远心镜头为主体的硬件测量系统的设计与搭建。具体研究内容如下:(1)针对微小物体的三维轮廓测量现有方法以及研究现状系统地调研。 对常规方法存在的问题进行归纳总结,明确了微小物体测量面临的困难与挑战。本文将从硬件系统搭建以及算法实现两个方面进行研究改进。(2)设计与搭建以体视显微镜和双远心镜头为主体的硬件测量系统。因体视显微镜可实现物体的立体成像,可观察区域范围大;双远心镜头因分辨率高,低畸变,景深大,在成像时能最大限度还原物体的形状信息。 因此,测量系统采用体视显微镜和双远心镜头为主体结构设计并搭建了测量系统,结合基于光学三角原理的正弦光栅条纹投影三维测量方法,在经过系统标定后,能顺利获取被测物体的三维轮廓信息,测量系统的视场范围可达 1.8cm*1.6 cm。(3)基于正弦光栅条纹投影和光学三角法的三维测量方法进行研究。本文选用无损伤、精度高、速度快、易实现的正弦光栅条纹投影结合光学三角法对微小物体表面的三维轮廓进行测量,详细阐述了其测量原理,提出了一种基于质量图引导的相位解包裹改进算法——可靠路径跟踪算法,在满足测量精度要求下,提高了系统整体测量速度;针对系统标定,基于一般成像模型引入了摄像机标定与系统标定方法,深入阐述了摄像机标定和系统标定的方法理论,完成了测量系统的整体标定。基于C++与MATLAB实现了相关算法。 进行了大量相关实验,验证了该测量方法的稳定性和有效性,实验结果表明
传感器实验 精04 张为昭 2010010591
实验二电涡流传感器变换特性 一、实验目的 1. 了解电涡流传感器的结构、工作原理及应用; 2. 了解电涡流传感器调频电路的特点,测试电涡流传感器变换特性。 二、实验装置及原理 1.装置 图2.1 电涡流传感器装置 2.原理 涡流传感器是七十年代以后发展较快的一种新型传感器。它广泛应用在位移振动监测、金属材质鉴别、无损探伤等技术领域中。 涡流传感器通常由扁平环形线圈组成。在线圈中通以高频(通常为2.5MHz 左右)电流,则在线圈中产生高频交变磁场。当导电金属板接近线圈时,交变磁场在板的表面层内产生感应电流即涡流。涡电流又产生一个反方向的磁场,从而减弱了线圈的原磁场,也就改变了原线圈的自感量L、阻抗Z及Q值。线圈上述参数的变化在其它条件不变的情况下仅是线圈与金属板之间距离的单值函数。 实验中采用了测量线圈自感量L的调频电路,即把线圈作为谐振回路的一个电感元件。当线圈与金属板之间距离h发生变化时,谐振回路的频率f也发生变化,再用鉴频器将频率变化转换成电压变化输出。 图2.2 电涡流传感器原理 三、实验内容及步骤 1. 测量前置器输出频率f与距离h之间的关系;输出电压V与距离h之间
(1)被测金属板先采用铝板。转动微调机构或千分尺使金属板与传感器端面接触即h=0,记下相应的输出信号频率,然后改变h并记下相应的输出频率f 的数值于表2-1中。 (2)改变h并记下涡电流传感器相应的输出电压峰峰值于表2-2中。 (3)改变h并记下测量电路最终的输出电压于表2-3中。 2. 换上钢板重复1的步骤,注意钢板在与传感器距离很小时传感器无输出,调整距离至有输出时作为零点,再开始进行后续测量。 3. 估测电涡流传感器的工作测量范围: 铝板:1.5mm 钢板:1.5mm(相对零点的位移) 四、数据整理及问题分析 1.实验数据整理
金属箔式应变片——半桥性能实验 一. 实验目的:比较半桥与单臂电桥的不同性能,了解其特点。 二. 基本原理:不同受力方向的两片应变片接入电桥作为邻边,电桥输出 三. 灵敏度提高,非线性得到改善。当两片应变片阻值和应变量相同时,其桥路输出电 压U02=EK/ε2。 四. 需用器件和单元:应变式传感器实验模板、应变式传感器、砝码、数显表、+15V 电源、+-4V 电源、万用表 五. 实验步骤: ① 按要求将应变式传感器装与传感器模板上。 ② 按要求进行电路接线,将两个应变片接入桥路。 ③ 进行测量,将数据记录到表格中。 六.实验数据 所以可知灵敏度δ=0.3639,非线性误差为δf1=Δm/Y F.s =1.112/65=1.71% 七、思考题: 1、半桥侧量时两片不同受力状态的电阻应变片接入电桥时,应放在: (1)对边 (2)邻边。 2、桥路(差动电桥)测量时存在非线性误差,是因为:(1)电桥测量原理上存在非线性 (2)应变片应变效应是非线性的 (3)调零值不是真正为零。 答:都是。但是调零值可以通过记录最初的非零值来消除此误差
金直流全桥的应用——电子秤实验 一. 实验目的:了解应变片直流全桥的应用电路的标定。 二. 基本原理:电子秤实验原理为实验三全桥测量原理,通过对电路调节 三. 使电路输出的电压值为重量对应值,电压量纲(V)改为重量量纲(g)即成为一台原始 电子秤。 四. 需用器件和单元:应变式传感器实验模板、应变式传感器、砝码、±15V 电源、± 4V 电源 五. 实验步骤: 1、按实验一中2的步骤将差动放大器调零:参考图1-2将四个应变片按正确的接法接成全桥形式,合上主控箱电源开关调节电桥平衡电位器Rw1,使数显表显示0.00V 。 2、将10只砝码全部置于传感器的托盘上,调节电位器Rw3(增益即满量程调节),使数显表显示为0.200V(2V 档测显)或-0.200V 。 3、拿去托盘上的所有法码,调节电器Rw4(零位调节),使数显表显示为0。000V 或—0。000V 。 4、重复2、3步骤的标定过程,一直到精确为止,把电压量纲V 改为重量量纲g ,就可秤重,成为一台原始的电子秤。 6、根据上表计算误差与非线性误差。 所以可知灵敏度δ=1,非线性误差为δ f1=Δm/Y F.s =0
华中科技大学 硕士学位论文 面结构光三维测量系统的精度研究 姓名:杜宪 申请学位级别:硕士 专业:材料加工工程 指导教师:王从军 20090522
华中科技大学硕士学位论文 摘要 结构光测量系统在工业检测、人体测量、文物保护和反求工程等众多领域具有广泛的应用前景。国外的面结构光三维测量技术已相对成熟,但设备价格昂贵。国内也有一些单位开展了相关研究,但普遍存在着精度不高、稳定性差等缺点。为此,本文在简要介绍结构光三维测量技术原理的基础上,系统分析了光栅条纹数和数字光栅投影装置的伽马非线性对测量精度的影响,以期进一步提高课题组前期开发的三维测量系统的精度。 面结构光三维测量系统,首先使用相移法和多频外差原理进行稳定高精度的相位计算;然后根据预先标定的系统参数,从得到的相位灰度图重构出被测物体的三维点云数据。 由三维重构过程可知,光栅周期数的增加可以降低立体匹配的误差,本文通过理论推导和实验研究,分析了不同光栅周期数对系统测量精度的影响,并为系统选择了一个最优的光栅周期数。当周期数为110~120时,系统的测量精度最高,滤波后可达0.037mm。 此外,三维重构的精度还与相位计算的精度有关,根据现有研究,投影仪的伽马非线性是相位误差的主要来源。本文分析了不同伽马值和不同条纹周期数的测量精度,发现条纹周期数抑制了伽马非线性,提高了相位计算的精度。 最后,通过分析不同距离的平面精度、拟合标准球直径及距离等测量实验,表明系统的测量精度稳定可靠,绝对测量精度可达0.05mm。 关键词:结构光;光栅周期数;误差;非线性
华中科技大学硕士学位论文 Abstract Structured Light Measurement System (SLMS) is widely used in many fields such as industrial inspection, human body measurement, Protection of Cultural Relics and reverse engineering etc. In abroad, SLMS is well developped, but they are always expensive. In China, lots of research work has been made on it, but they are poor in accuracy and stability. So, this paper, which is based on a brief introduction of the structured light measurement technology, analyzes the impact of the period number of fringe pattern and gamma non-linear of Digital Projector, attempt to further improve the precision of pre-development measurement system. In our SLMS, phase-shifting method and multi-frequency heterodyne principle were imployed to obtain phrase gray map, then 3D data could be reconstructed base on the pre-calibrated parameters. According to the process of 3D reconstruction, we found that the increase of the period number of fringe pattern can reduce the error. So this paper analyzed the relationship between period number of fringe pattern and accuracy through theoretical research and experiments. Then we can conclude that the optimal period number is 110~120 and the SLMS gets the highest precision which is up to 0.037mm after filtering. In addition, the calculated phase value can also affect the accuracy of 3D reconstruction. According to research, gamma non-linear of projector is the main error source of the phase error. This paper analyzes 3D date by using different gamma values and different the period numbers of fringe pattern, then found that the period number of fringe pattern can inhibit the effect of the gamma non-linear of projector and improved the accuracy of the phase calculation. Finally, a series of measurement experiment, such as analyses of the accuracy in different distance and fitting diameter and distance of the standard ball, shows that the accuracy of system is stable and repeatability and the absolute measurement accuracy is 0.05mm. Key words: Structured light; Period number of fringe pattern; Error; Non-linear
光学干涉测量技术 ——干涉原理及双频激光干涉 1、干涉测量技术 干涉测量技术和干涉仪在光学测量中占有重要地位。干涉测量技术是以光波干涉原理为基础进行测量的一门技术。相干光波在干涉场中产生亮、暗交替的干涉条纹,通过分析处理干涉条纹获取被测量的有关信息。 当两束光亮度满足频率相同,振动方向相同以及相位差恒定的条件,两束光就会产生干涉现象,在干涉场中任一点的合成光强为: 122I I I πλ=++ 式中△是两束光到达某点的光程差。明暗干涉条纹出现的条件如下。 相长干涉(明): min 12I I I I ==+ ( m λ=) 相消干涉(暗): min 12I I I I ==+-, (12m λ? ?=+ ??? ) 当把被测量引入干涉仪的一支光路中,干涉仪的光程差则发生变化。通过测量干涉条纹的变化量,即可以获得与介质折射率和几何路程有关的各种物理量和几何量。 按光波分光的方法,干涉仪有分振幅式和分波阵面式两类。按相干光束传播路径,干涉仪可分为共程干涉和非共程干涉两种。按用途又可将干涉仪分为两类,一类是通过测量被测面与参考标准波面产生的干涉条纹分布及其变形量,进而求得试样表面微观几何形状、场密度分布和光学系统波像差等,即所谓静态干涉;另一类是通过测量干涉场上指定点干涉条纹的移动或光程差的变化量,进而求得试样的尺寸大小、位移量等,即所谓动态干涉。 下图是通过分波面法和分振幅法获得相干光的途径示意图。光学测量常用的是分振幅式等厚测量技术。 图一 普通光源获得相干光的途径 与一般光学成像测量技术相比,干涉测量具有大量程、高灵敏度、高精度等特点。干涉测量应用范围十分广泛,可用于位移、长度、角度、面形、介质折射率的变化及振动等方面的测量。在测量技术中,常用的干涉仪有迈克尔逊干涉仪(图二)、马赫-泽德干涉仪、菲索
实验一金属箔式应变片性能—单臂电桥 1、实验目的了解金属箔式应变片,单臂单桥的工作原理和工作情况。 2、实验方法在CSY-998传感器实验仪上验证应变片单臂单桥的工作原理 3、实验仪器CSY-998传感器实验仪 4、实验操作方法 所需单元及部件:直流稳压电源、电桥、差动放大器、双孔悬臂梁称重传感器、砝码、一片应变片、F/V表、主、副电源。 旋钮初始位置:直流稳压电源打倒±2V档,F/V表打到2V档,差动放大增益最大。 实验步骤: (1)了解所需单元、部件在实验仪上的所在位置,观察梁上的应变片,应变片为棕色衬底箔式结构小方薄片。上下二片梁的外表面各贴二片受力应变片。 (2)将差动放大器调零:用连线将差动放大器的正(+)、负(-)、地短接。将差动放大器的输出端与F/V表的输入插口Vi 相连;开启主、副电源;调节差动放大器的增益到最大位置,然后调整差动放大器的调零旋钮使F/V表显示为零,关闭主、副电源。 (3)根据图1接线R1、R2、R3为电桥单元的固定电阻。R4为应变片;将稳压电源的切换开关置±4V 档,F/V表置20V档。开启主、副电源,调节电桥平衡网络中的W1,使F/V表显示为零,等待数分钟后将F/V表置2V档,再调电桥W1(慢慢地调),使F/V表显示为零。 (4) 将测微头转动到10㎜刻度附近,安装到双平行梁的右端即自由端(与自由端磁钢吸合),调节测微头支柱的高度(梁的自由端跟随变化)使V/F表显示值最小,再旋动测微头,使V/F表显示为零(细调零),这时的测微头刻度为零位的相应刻度。 (5) 往下或往上旋动测微头,使梁的自由端产生位移记下V/F表显示的值,每旋动测微头一周即 压值的相应变化。
实验一量块的使用 一、实验目的 1、能正确进行量块组合,并掌握量块的正确使用方法; 2、加深对量值传递系统的理解; 3、进一步理解不同等级量块的区别; 二、实验仪器设备 量块;千分表;测量平板;千分尺校正棒。 三、实验原理 1量块的测量平面十分光洁和平整,当用力推合两块量块使它们的测量平面互相紧密接触时,两块量块便能粘合在一起,量块的这种特性称为研合性。利用量块的研合性,就可以把各种尺寸不同的量块组合成量块组。 四、实验内容与步骤 (一)实验内容 采用合理的量块组合,测量千分尺校正棒。 (二)实验步骤 1 用千分表测量千分尺校正棒 2 据所需要的测量尺寸,自量块盒中挑选出最少块数的量块。(每一个尺寸所拼凑的量块数目不得超过 4~5 块,因为量块本身也具有一定程度的误差,量块的块数越多,便会积累成较大的误差。) 3量块使用时应研合,将量块沿着它的测量面的长度反向,先将端缘部分测量面接触,使初步产生粘合力,然后将任一量块沿着另一个量块的测量面按平行方向推滑前进,最后达到两测量面彼此全部
研合在一起。 4正常情况下,在研合过程中,手指能感到研合力,两量块不必用力就能贴附在一起。如研合立力不大,可在推进研合时稍加一些力使其研合。推合时用力要适当,不得使用强力特别在使用小尺寸的量块时更应该注意,以免使量块扭弯和变形。 5如果量块的研合性不好,以致研合有困难时,可以将任意一量块的测量面上滴一点汽油,使量块测量面上沾有一层油膜,来加强它的黏结力,但不可使用汗手擦拭量块测量面,量块使用完毕后应立即用煤油清洗。 6量块研合的顺序是:先将小尺寸量块研合,再将研合好的量块与中等尺寸量块研合,最后与大尺寸量块研合。 7. 记录数据; 六思考题 量块按“等”测量与按“级”测量哪个精度比较高?
物质为主体的高温固体微粒构成的。火焰的热辐射具有离散光谱的气体辐射和连续光谱的固体辐射。不同燃烧物的火焰辐射强度、波长分布有所差异,但总体来说,其对应火焰温度的 1 ~ 2 μm 近红外波长域具有最大的辐射强度。例如汽油燃烧时的火焰辐射强度的波长。 火焰传感器是机器人专门用来搜寻火源的传感器,当然火焰传感器也可以用来检测光线的亮度,只是本传感器对火焰特别灵敏。火焰传感器利用红外线对对火焰非常敏感的特点,使用特制的红外线接受管来检测火焰,然后把火焰的亮度转化为高低变化的电平信号,输入到中央处理器中,中央处理器根据信号的变化做出相应的程序处理。 火焰传感器是探测在物质燃烧时,产生烟雾和放出热量的同时,也产生可见的或大气中没有的不可见的光辐射。 火焰传感器又称感光式火灾传感器,它是用于响应火灾的光特性,即探测火焰燃烧的光照强度和火焰的闪烁频率的一种火灾传感器。 理; 2、通过该实验项目,学生能够学会编写火焰传感器的程序。
1、编写一个读取火焰传感器输出电平信号的程序; 2、将火焰检测状态做简单的处理显示,正常无火焰状态为0,检测到火焰状态为1; 3、用按键KEY1控制ZIGBEEN是否发送数据。 6.4.1硬件部分 1、ZIGBEE调试底板一个; 图6-1 ZIGBEE调试底板 2、20PIN转接线一条和带USB的J-Link仿真器一个; 图6-2 J-Link仿真器 3、转接板一个; 实验内容 6.3 实验设备 6.4 电 源 开 关 电 源 传感器C端口 指示灯 2 J-LINK接 ZigBee_DEBUG 复位键 节点按键 拨码开关 ZigBe按键 红 外 发 射 指 示 灯 1 ZigBee复位键 可 调 电 阻传 感 器 A 端 口 传感器B端口 方口USB线,另一端连接电上电指示灯 20PIN转接线,另一端接转接板 20PIN转接线接口 10PIN转接线接口 串口接口
一 金属箔式应变片――半桥搭建 一、实训目的:比较半桥与单臂电桥的不同性能,掌握其接线方法。 二、实训仪器:同项目一 三、相关原理: 不同受力方向的两只应变片接入电桥作为邻边,如图2-1。电桥输出灵敏度提高,非线性得到改善,当两只应变片的阻值相同、应变数也相同时,半桥的输出电压为 Uo=EK ε/2 = R R E ??2 (2-1) E 为电桥电源电压,式2-1表明,半桥输出与应变片阻值变化率呈线性关系。 四、实训内容与操作步骤 1.应变传感器已安装在应变传感器实验模块上,可参考图1-1。 2.差动放大器调零,参考实训项目一步骤2。 3.按图2-1接线,将受力相反(一片受拉,一片受压)的两只应变片接入电桥的邻边。 4.加托盘后电桥调零,参考实训项目一步骤4。 5.在应变传感器托盘上放置一只砝码,读取数显表数值,依次增加砝码和读取相应的数显表值,直到200g 砝码加完,计下数显表值,填入下表,关闭电源。 五、实训报告 根据表2-1的数据,计算灵敏度L=ΔU/ΔW ,非线性误差δf 2 六、思考题 引起半桥测量时非线性误差的原因是什么? 图2-1 双臂电桥接线图
二金属箔式应变片――全桥搭建 一、实训目的: 了解全桥测量电路的性能,掌握其接线方法。 二、实训仪器: 同项目一。 三、相关原理: 全桥测量电路中,将受力性质相同的两只应变片接到电桥的对边,不同的接入邻边,如图3-1,当应变片初始值相等,变化量也相等时,其桥路输出:Uo=KEε(3-1)E为电桥电源电压,式3-1表明,全桥输出灵敏度比半桥又提高了一倍,非线性误差得到进一步改善。 四、实训内容与操作步骤 1.应变传感器已安装在应变传感器实验模块上,可参考图1-1。 2.差动放大器调零,参考实训项目一步骤2。 3.按图3-1接线, 将受力相反(一片受拉, 一片受压)的两对应变 片分别接入电桥的邻边。 4.加托盘后电桥调 零,参考实训项目一步骤4。图3-1 5.在应变传感器托 盘上放置一只砝码,读取 数显表数值,依次增加砝 码和读取相应的数显表值 ,直到200g砝码加完, 计下数显表值,填入下表3-1,关闭电源。图3-1 全桥电路接线图 五、实训报告 根据记录表3-1的数据,计算灵敏度L=ΔU/ΔW,非线性误差δf3 三扩散硅压阻压力传感器差压测量 一、实训目的: 了解扩散硅压阻式压力传感器测量压力的原理与方法。 二、实训仪器 压力传感器模块、温度传感器模块、数显单元、直流稳压源+5V、±15V。 三、相关原理
实验一直流激励时霍尔传感器位移特性实验 一、实验目的: 了解霍尔式传感器原理与应用。 二、基本原理: 金属或半导体薄片置于磁场中,当有电流流过时,在垂直于磁场和电流的方向上将产生 电动势,这种物理现象称为霍尔效应。具有这种效应的元件成为霍尔元件,根据霍尔效应,霍 尔电势 U H= K H IB ,当保持霍尔元件的控制电流恒定,而使霍尔元件在一个均匀梯度的磁场中 沿水平方向移动,则输出的霍尔电动势为U H kx ,式中k—位移传感器的灵敏度。这样它就 可以用来测量位移。霍尔电动势的极性表示了元件的方向。磁场梯度越大,灵敏度越高;磁场 梯度越均匀,输出线性度就越好。 三、需用器件与单元: 霍尔传感器实验模板、霍尔传感器、±15V 直流电源、测微头、数显单元。 四、实验步骤: 1、将霍尔传感器安装在霍尔传感器实验模块上,将传感器引线插头插入实验模板的插座 中,实验板的连接线按图9-1进行。 1、 3 为电源±5V , 2、4 为输出。 2、开启电源,调节测微头使霍尔片大致在磁铁中间位置,再调节Rw1 使数显表指示为零。 图 9-1直流激励时霍尔传感器位移实验接线图 3、测微头往轴向方向推进,每转动0.2mm 记下一个读数,直到读数近似不变,将读数填 入表 9-1。 表9- 1 X ( mm) V(mv)
作出 V-X 曲线,计算不同线性范围时的灵敏度和非线性误差。 五、实验注意事项: 1、对传感器要轻拿轻放,绝不可掉到地上。 2、不要将霍尔传感器的激励电压错接成±15V ,否则将可能烧毁霍尔元件。 六、思考题: 本实验中霍尔元件位移的线性度实际上反映的时什么量的变化? 七、实验报告要求: 1、整理实验数据,根据所得得实验数据做出传感器的特性曲线。 2、归纳总结霍尔元件的误差主要有哪几种,各自的产生原因是什么,应怎样进行补偿。
传感器心得体会
传感器心得体会 【篇一:传感器实验总结】 《传感器及检测技术》教学实践工作总结 本学期,担任《传感器及检测技术》课程的理论和实践教学内容。本课程的实践教学主要是教学实验,在全体同学的大力配合下,比较圆满的完成了实践教学任务,达到了实验的预期目的。现将此课程的实践教学工作总结如下: 1、实验计划的制定 为更好的完成实践教学环节,使学生能够真正的在实践环节学到更多的东西,在学期初我就认真研究教材内容和教学大纲要求,针对教学内容和学生特点制定了详细的实验安排,并与实验室老师进行了认真的沟通,充分做好教学实践前的各项准备工作。 2、注重理论和实践的结合 每讲授一段内容,就组织同学们做一次实验,让学生把课堂上获得的理论知识及时的得到验证和应用,从而加深对所学内容的理解。同时鼓励同学们利用课余时间多到实验室做一些创造性的实验,提高他们的知识迁移能力和思维能力。 3、实验过程的安排 (1)每次实验前,提前下达实验任务,让学生做好实验前的各种准备工作。由班长做好分组工作,每组指定一名组长,实行组长负责制,负责本组的组织和协调工作,。 (2)进实验室时,讲清实验室纪律,不得随意摆弄实验用品,要严格遵守实验章程,在老师的指导下进行各种实验。
(3)实验过程中,认真抓好学生的纪律,不得无故迟到、早退,杜绝做与实验无关的事情。实验过程中教师要不断巡 视及时发现学生们遇到的各种问题,并给与指导或启发。尽量多鼓励、少批评,培养学生的自信心,提高学生学习的积极性。 (4)实验完毕,及时清查实验物品,并督促学生摆放好实验物品,做到物归原位。另外,每组展示实验成果,并派代表做出总结,谈谈实验中遇到的各种问题,并说明做出了怎样的处理,有哪些收获。小组成员之间先进行互评,然后由教师作出补充,并适当给与鼓励。同时督促同学课下认真完成实验报告。 4、反思改进 在每次实验完毕后,我都把实验中发现的问题进行归纳整理,进行反思,同时向有经验的教师请教,争取在下次实践课中加以改进。 总之,这一个学期的实践教学,总的来说基本上能够按照要求保质保量的完成教学任务,但从中我也发现了一些问题,在今后的教学工作中,我会努力的改进不足的地方,争取把以后的实践教学工作做得更好。 【篇二:实验心得体会】 实验心得体会 在做测试技术的实验前,我以为不会难做,就像以前做物理实验一样, 做完实验,然后两下子就将实验报告做完.直到做完测试实验时,我才知道其实并不容易做,但学到的知识与难度成正比,使我受益匪浅. 在做实验前,一定要将课本上的知识吃透,因为这是做实验的基础,否则,在老师讲解时就会听不懂,这将使你在做实验时的难度加大,浪费做实验的宝贵时间.比如做应变片的实验,你要清楚电桥的各种接法,如果你不清楚,在做实验时才去摸索,这将使你极大地浪费时间,使你事倍功半.做实验时,一定要亲力亲为,务必要将每个步骤,每个细节弄清楚,弄
实验一直线度误差的测量 一、实验目的 掌握按“节距法”测量直线度误差的方法。 二、测量原理及数据处理 对于很小表面的直线度误差的测量常按“节距法”,应是将被测平面分为若干段,用小角度度量仪(水平仪、自准直仪)测出各段对水平线的倾斜角度,然后通过计算或图解来求得轮廓线的直线度误差。本实验用合像水平仪。 具体测量方法如下: 将被测表面全长分为n段,每段长l=L/N应是桥板的跨距。将桥板置于第一段,桥板的两支承点放在分段点处,并把水平仪放在桥板上,使两者相对固定(用橡皮泥粘住)记下读数a1(单位为格)。然后将桥板沿放测表面移动,逐段测量下去,直至最后一段(第n段)。如图1每次移l,并要使支承点首尾相接,记下每段读数(单位为格)a1、a2、……a n。最后按下列步骤(见例)列表计算出各测量点对两端点连线的直线度偏差Δh i,并取最大负偏差的绝对值之和作为所求之直线度误差。 [例]设有一机床导轨,长2米(L=2000mm),采用桥板跨距l=250mm,用分度值c=0.02mm/m的水平仪,按节距法测得各点的读数a i(格)如表1。 表1
也可用作图法求出直线度误差,如图2。 作图法是在坐标纸上,以导轨长度为微坐标,各点读数累积为纵坐标,将测量得到的各点读数累积后标在坐标上,并将这些坐标点连成折线,以两端点连线作为评定基准,取最大正偏差与最大负偏差的绝对值之和,再换算为线值(μ),即为所求之直线度误差。 测量导轨直线度误差时,数据处理的根据,可由下图看出:(图3) A i — 导轨实际轮廓上的被测量点(i =0、1、2、……、n ); a i — 各段上水平仪的读数(格); Y i — 前后两测量点(i -1,i )的高度差; h i — 各测点(A i )到水平线(通过首点A 0)的距离(μ),显然 1 'i n i i h y == ∑
传感器实验
实验一金属箔式应变计性能——应变电桥 实验目的: 1、观察了解箔式应变片的结构及粘贴方式。 2、测试应变梁变形的应变输出。 3、比较各桥路间的输出关系。 实验原理: 本实验说明箔式应变片及直流电桥的原理和工作情况。 应变片是最常用的测力传感元件。当用应变片测试时,应变片要牢固地粘贴在测试体表面,测件受力发生形变,应变片的敏感栅随同变形,其电阻值也 随之发生相应的变化。通过测量电路,转换成电信号输出显示。 电桥电路是最常用的非电量电测电路中的一种,当电桥平衡时,桥路对臂电阻乘积相等,电桥输出为零,在桥臂四个电阻R1、R2、R3、R4中,电阻的相对变化率分别为△R1/ R1、△R2/ R2、△R3/ R3、△R4/ R4 ,当使用一个应变片时, ∑ ? = R R R;当二个应变片组成差动状态工作,则有∑ ? = R R 2 R;用四个应变片 组成二个差动对工作,且R1= R2= R3= R4=R,∑ ? = R R 4 R。 实验所需部件:(括号{ }内为2001B型内容) 直流稳压电源+4V、公共电路模块(一){公共电路模块}、贴于主机工作台悬臂梁上的箔式应变计、螺旋测微仪、数字电压表 实验步骤: 1、连接主机与模块电路电源连接线,差动放大器增益置于最大位置(顺时针方向旋到底),差动放大器“+”“—”输入端对地用实验线短路。输出端接电压表2V档。开启主机电源,用调零电位器调整差动放大器输出电压为零,然后拔掉实验线,调零后模块上的“增益、调零”电位器均不应再变动。
(图1) 2、观察贴于悬臂梁根部的应变计的位置与方向,按图(1)将所需实验部件连接成测试桥路,图中R1、R2、R3分别为固定标准电阻,R为应变计(可任选上梁或下梁中的一个工作片),图中每两个节之间可理解为一根实验连接线,注意连接方式,勿使直流激励电源短路。 将螺旋测微仪装于应变悬臂梁前端永久磁钢上,并调节测微仪使悬臂梁基本处于水平位置。 3、确认接线无误后开启主机,并预热数分钟,使电路工作趋于稳定。调节模块上的W D电位器,使桥路输出为零。 4、用螺旋测微仪带动悬臂梁分别向上和向下位移各5mm ,每位移1mm记录一个输出电压值,并记入下表: 位 移 mm 电 压V 根据表中所测数据在坐标图上做出V—X曲线,计算灵敏度S:S=X V? ?。 / 注意事项: 1、实验前应检查实验连接线是否完好,学会正确插拔连接线,这是顺利完成实验的基本保证。 2、由于悬臂梁弹性恢复的滞后及应变片本身的机械滞后,所以当螺旋测微仪回到初始位置后桥路电压输出值并不能马上回到零,此时可一次或几次将螺旋测微仪反方向旋动一个较大位移,使电压值回到零后再进行反向采集实验。 3、实验中实验者用螺旋测微仪进行位移后应将手离开仪器后方能读取测试
33传感器原理及应用实验报告 实验人:程昌 09327100 合作人:雷泽雨 09327104 理工学院光信息科学与技术 实验时间:2011年5月20日,5月27日 实验地点:1号台 【实验目的】 1.了解传感器的工作原理。 2,掌握声音、电压等传感器的使用方法。 3.用基于传感器的计算机数据采集系统研究电热丝的加热效率。 【实验仪器】 PASCO公司750传感器接口1台,温度传感器1只,电流传感器1只,电压传感器1只,声音传感器1只,功率放大器1台,电阻1只(1k),电容1只(非电解电容,参数不限),二极管1只(非稳压二极管,参数不限),导线若干。 【安全注意事项】 1、插拔传感器的时候需沿轴向平稳插拔,禁止上下或左右摇动插头,否则易损坏750接口。 2、严禁将电流传感器(Current sensor)两端口直接接到750接口或功率放大器的信号输出 端,使用时必须串联300欧姆以上的电阻。由于电流传感器的内阻很小,直接接信号输出端则电流很大,极易损坏。 3、测量二极管特性时必须串联电阻,因为二极管的正向导通电压小于1V,不串联电阻则电 流很大,容易烧毁,也易损坏电流传感器。 【原理概述】 传感器(sensor或transducer)有时亦被称为换能器、变换器、变送器或探测器,是指那些对被测的某一物理量、化学量或生物量的信息具有感受与检出功能,并使之按照一定规律转换成与之对应的有用输出信号的元器件或装置。为了与现代电子技术结合在一起,通常都转换为电信号,特别是电压信号,从而将各种理化量的测量简化为统一的电压测量,易于进一步利用计算机实现各种理化量的自动测量、处理和自动控制。现在,传感技术已成为衡量一个国家科学技术发展水平的重要标志之一,与信息技术、计算机技术并称为支撑整个现代信息产业的三大支柱。有关传感器的研究也得到深入而广泛的关注,在中国期刊全文数据库中可检索到超过2万篇题目中包含“传感器”三字的论文。因此,了解并掌握一些有关传感器的基本结构、工作原理及特性的知识是非常重要的。
光学测量技术详解(图文) 光学测量是生产制造过程中质量控制环节上重要的一步。它包括通过操作者的观察进行的快速、主观性的检测,也包括通过测量仪器进行的自动定量检测。光学测量既可以在线下进行,即将工件从生产线上取下送到检测台进行测量;还可以在线进行,即工件无须离开产线;此外,工件还可以在生产线旁接受检测,完成后可以迅速返回生产线。 人的眼睛其实就是一台光学检测仪器;它可以处理通过晶状体映射到视网膜上的图像。当物体靠近眼球时,物体的尺寸感觉上会增加,这是因为图像在视网膜上覆盖的“光感器”数量增加了。在某一个位置,图像达到最大,此时再将物体移近时,图像就会失焦而变得模糊。这个距离通常为10英寸(250毫米)。在这个位置上,图像分辨率大约为0.004英寸(100微米)。举例来说,当你看两根头发时,只有靠得很近时才能发现它们之间是有空隙的。如果想进一步分辨更加清楚的细节的话,则需要进行额外的放大处理。 本部分设定了隐藏,您已回复过了,以下是隐藏的内容 人的眼睛其实就是一台光学检测仪器;它可以处理通过晶状体映射到视网膜上的图像。本图显示了人眼成 像的原理图。 人眼之外的测量系统 光学测量是对肉眼直接观察获得的简单视觉检测的强化处理,因为通过光学透镜来改进或放大物体的图像,可以对物体的某些特征或属性做出准确的评估。大多数的光学测量都是定性的,也就是说操作者对放大的图像做出主观性的判断。光学测量也可以是定量的,这时图像通过成像仪器生成,所获取的图像数据再用于分析。在这种情况下,光学检测其实是一种测量技术,因为它提供了量化的图像测量方式。 无任何仪器辅助的肉眼测量通常称为视觉检测。当采用光学镜头或镜头系统时,视觉检测就变成了光学测量。光学测量系统和技术有许多不同的种类,但是基本原理和结构大致相同。
互换性实验指导书 机械工程学院
实验一量块的使用 一、实验目的 1、能正确进行量块组合,并掌握量块的正确使用方法; 2、加深对量值传递系统的理解; 3、进一步理解不同等级量块的区别; 二、实验仪器设备 量块;千分表;测量平板;被测件。 三、实验原理 量块的测量平面十分光洁和平整,当用力推合两块量块使它们的测量平面互相紧密接触时,两块量块便能粘合在一起,量块的这种特性称为研合性。利用量块的研合性,就可以把各种尺寸不同的量块组合成量块组。 四、实验内容与步骤 (一)实验内容 采用合理的量块组合,测量被测零件尺寸高度。 (二)实验步骤 1.用游标卡尺测量被测件 2.据所需要的测量尺寸,自量块盒中挑选出最少块数的量块。(每一个尺寸所拼凑的量块数目不得超过 4块,因为量块本身也具有一定程度的误差,量块的块数越多,便会积累成较大的误差。) 3.量块使用时应研合,将量块沿着它的测量面的长度反向,先将端缘部分测量面接触,使初步产生粘合力,然后将任一量块沿着另一个量块的测量面按平行方向推滑前进,最后达到两测量面彼此全部研合在一起。
4.将研合后的量块与被测件同时放到测量平板上,在测量平板上移动指示表的测量架,使指示表的测头与量块上工作表面相接触,转动指示表的刻度盘,调整指示表示值零位。 5.抬起指示表测头,将被测件放在指示表测头下,取下量块,记录下指示表的读数。 6.量块的尺寸与指示表的读数之和就是被测件的尺寸。 7. 记录数据; 五、思考题 量块按“等”测量与按“级”测量哪个精度比较高?
实验二常用量具的使用 一、实验目的 1、正确掌握千分尺、内径百分表、游标卡尺的正确使用方法; 2、掌握对测量数据的处理方法; 3、对比不同量具之间测量精度的区别。 二、实验仪器设备 外径千分尺;内径百分表;游标卡尺;轴承等。 三、实验原理 分度值的大小反映仪器的精密程度。一般来说,分度值越小,仪器越精密,仪器本身的“允许误差”(尺寸偏差)相应也越小。学习使用这些仪器,要注意掌握它们的构造特点、规格性能、读数原理、使用方法以及维护知识等,并注意要以后的实验中恰当地选择使用。 四、实验内容及实验步骤 (一)实验内容 1、熟悉仪器的结构原理及操作使用方法。 2、用外径千分尺、内径百分表、游标卡尺测量轴承内、外径。 3、对所测数据进行误差处理,得出最终测量结果。 (二)实验步骤 1、用游标卡尺测量轴承外径的同一部位5次(等精度测量),将测量值记入下表中,并完成后面的计算: ⑴平均值:将5次测量值相加后除以5,作为该测量点的实际值。 ⑵变化量:测量值中的最大值与最小值之差。 入上表中,并完成后面的计算: ⑴平均值:将5次测量值相加后除以5,作为该测量点的实际值。 ⑵变化量:测量值中的最大值与最小值之差。 ⑶测量结果:按规范的测量结果表达式写出测量结果。 3、内径百分表测量步骤: (1)内径百分表在每次使用前,首先要用标准环规、夹持的量块或外径千分尺对零,环规、夹持的量块和外径千分尺的尺寸与被测工件的基本尺寸相等。 (2)内径百分表在对零时,用手拿着隔热手柄,使测头进入测量面内,摆动直管,测头在X方向和Y方向(仅在量块夹中使用)上下摆动。观察百分表的示
实验一金属箔式应变片单臂电桥性能实验 一、实验目的:了解金属箔式应变片的应变效应,单臂电桥工作原理和性能。 二、基本原理:电阻丝在外力作用下发生机械变形时,英电阻值发生变化,这就是电阻应变效应,描 述电阻应变效应的关系式为: △R/R=K£ 式中AR/R为电阻丝的电阻相对变化值,K为应变灵敏系数,t =Al/l为电阻丝长度相对变化。金属箔式应变片是通过光刻、腐蚀等工艺制成的应变敏感元件,用它来转换被测部位的受力大小及状态,通过电桥原理完成电阻到电压的比例变化,输出电压UO=EK£(E为供桥电压),对单臂电桥而言,电桥输出电压,U01=EK e /4o (E为供桥电压)。 三、器件与单元:应变式传感器实验模板、应变式传感器、磁码(每只约20g)、数显表、±15V电 源、±4V电源、万用表(自备)。 四、实验步骤: 1、根据图(1-1),应变式传感器已装于应变传感器模板上。传感器中各应变片已接入模板左上方的 Rl、R2、R3、R4标志端。加热丝也接于模板上,可用万用表进行测量判别,R1=R2=R3=R4=35OQ,加热丝阻值约为50Q左右。 应变片托盘 图1-1应变式传感器安装示意图 2、实验模板差动放大器调零,方法为:①接入模板电源±15V(从主控箱引入),检查无误后,合上 主控箱电源开关,将实验模板增益调节电位器Rw3顺时针调丹到大致中间位置,②将差放的正、负输入端与地短接,输出端与主控箱而板上数显电压表输入端Vi相连,调节实验模板上调零电位器RW4,使数显表显示为零(数显表的切换开关打到2V档),完毕关闭主控箱电源。3、参考图(1-2)接入传感器,将应变式传感器的其中一个应变片R1(即模板左上方的R1)接入电 桥作为一个桥臂,它与R5、R6、R7接成直流电桥(R5、R6、R7在模块已连接好),接好电桥调零电位器Rwl,接上桥路电源±4V(从主控箱引入),检査接线无误后,合上主控箱电源开关,先粗调VTRwl,再细调RW4使数显表显示为零。
传感器综合实验 前提:电阻应变式传感器 电阻应变式传感器以电阻应变计为转换元件的电阻式传感器。电阻应变式传感器由弹性敏感元件、电阻应变计、补偿电阻和外壳组成,可根据具体测量要求设计成多种结构形式。弹性敏感元件受到所测量的力而产生变形,并使附着其上的电阻应变计一起变形。电阻应变计再将变形转换为电阻值的变化,从而可以测量力、压力、扭矩、位移、加速度和温度等多种物理量。传感器中的电阻应变片具有金属的应变效应,即在外力作用下产生机械形变,从而使电阻值随之发生相应的变化。电阻应变片主要有金属和半导体两类,金属应变片有金属丝式、箔式、薄膜式之分。半导体应变片具有灵敏度高(通常是丝式、箔式的几十倍)、横向效应小等优点。 一.实验目的 (1)加深对应力和应变概念的理解; (2)了解金属箔式应变片,单臂单桥的工作原理和工作情况; (3)验证单臂,半桥,全桥的性能及相互之间关系; (4)了解温度对应变测试系统的影响; (5)了解传感器(电阻应变片)在检测中的应用。 二.实验仪器: 直流稳压电源,15V不可调直流稳电源,差动放大器,电桥,F/V表,测微头,双平行梁,双孔悬臂梁称重传感器,应变片,砝码,加热器,水银温度计(自备),主,副电源。 三.实验原理 要测量模拟金属梁的应力,首先引入描述物体变形的物理量“应变”。设模拟金属梁原长为l的一段,在变形时发生“伸长”或“缩短”量为,则应变为 应变的大小,即与外力F的大小及应用位置有关,也与材料本身的弹性有关。根据胡克定律, 由上式可知,应变最大处,应力也最大。但应力是内力,无法直接测量,应先测量应变后换算出应力。而应变又可用电阻应变片将转换成易于放大的电压、电流或功率的变化进行测量。 因此,应力就可以测出。 (1)模拟金属梁的设置 如图,它是用长150毫米、宽17毫米的钢尺做成,其上下表面各贴有3片电阻应变片。上表面的应变片受力,下表面的应变片受压。拉区电阻值增大,压区电阻值变小。