开关磁阻电机: 开关磁阻电动机驱动系统(SRD)是较为复杂的机电一体化装置,SRD的运行需要在线实时检测的反馈量一般有转子位置、速度及电流等,然后根据控制目标综合这些信息给出控制指令,实现运行控制及保护等功能。转子位置检测环节是SRD的重要组成部分,检测到的转子位置信号是各相主开关器件正确进行逻辑切换的根据,也为速度控制环节提供了速度反馈信号。 开关磁阻电机具有再生的能力,系统效率高: 对开关磁阻电机的理论研究和实践证明,该系统具有许多显著的优点: (1)电机结构简单、坚固,制造工艺简单,成本低,可工作于极高转速;定子线圈嵌放容易,端部短而牢固,工作可靠,能适用于各种恶劣、高温甚至强振动环境。 (2)损耗主要产生在定子,电机易于冷却;转子无永磁体,可允许有较高的温升。 (3)转矩方向与电流方向无关,从而可最大限度简化功率变换器,降低系统成本。 (4)功率变换器不会出现直通故障,可靠性高。 (5)起动转矩大,低速性能好,无感应电动机在起动时所出现的冲击电流现象。 (6)调速范围宽,控制灵活,易于实现各种特殊要求的转矩-速度特性。 (7)在宽广的转速和功率范围内都具有高效率 (8)能四象限运行,具有较强的再生制动能力。 (9)容错能力强。开关磁阻电机的容错体现在电机某一相损坏,电机照样可以运行。 开关磁阻电机的应用: 近年来,开关磁阻电机的应用和发展取得了明显的进步,已成功地应用于电动车驱动、通用工业、家用电器和纺织机械等各个领域,功率范围从10W到5MW,最大速度高达100000 r/min。
开关磁阻电机电动车应用 开关磁阻电机最初的应用领域就是电动车。目前电动摩托车和电动自行车的驱动电机主要有永磁无刷及永磁有刷两种,然而采用开关磁阻电机驱动有其独特的优势。当高能量密度和系统效率为关键指标时,开关磁阻电机变为首选对象。 SRD开关磁阻电机驱动系统的电机结构紧凑牢固,适合于高速运行,并且驱动电路简单成本低、性能可靠,在宽广的转速范围内效率都比较高,而且可以方便地实现四象限控制。这些特点使SRD开关磁阻电机驱动系统很适合电动车辆的各种工况下运行,是电动车辆中极具有潜力的机种。SRD的最大特点是转矩脉动大,噪声大;此外,相对永磁电机而言,功率密度和效率偏低;另一个缺点是要使用位置传感器,增加了结构复杂性,降低了可靠性。因此无传感器的SRD也是未来的发展趋势之一。其优点主要表现在以下几个方面: (1)开关磁阻电机不仅效率高,而且在很宽的功率和转速范围内都能保持高效率,这是其它类型驱动系统难以达到的。这种特性对电动车的运行情况尤为适合,有利于提高电动车的续驶里程。 (2)开关磁阻电机很容易通过采用适当的控制策略和系统设计满足电动车四象限运行的要求,并且还能在高速运行区域保持强有力的制动能力。 (3)开关磁阻电机有很好的散热特性,从而能以小的体积取得较大的输出功率,减小电机体积和重量。 (4)通过调整开通角和关断角,开关磁阻电机完全可以达到它激直流电机驱动系统良好的控制特性,而且这是一种纯逻辑的控制方式,很容易智能化,从而能通过重新编程或替换电路元件,方便地满足不同运行特性的要求。 (5)开关磁阻电机无论电机还是功率变换器都十分坚固可靠,无需或很少
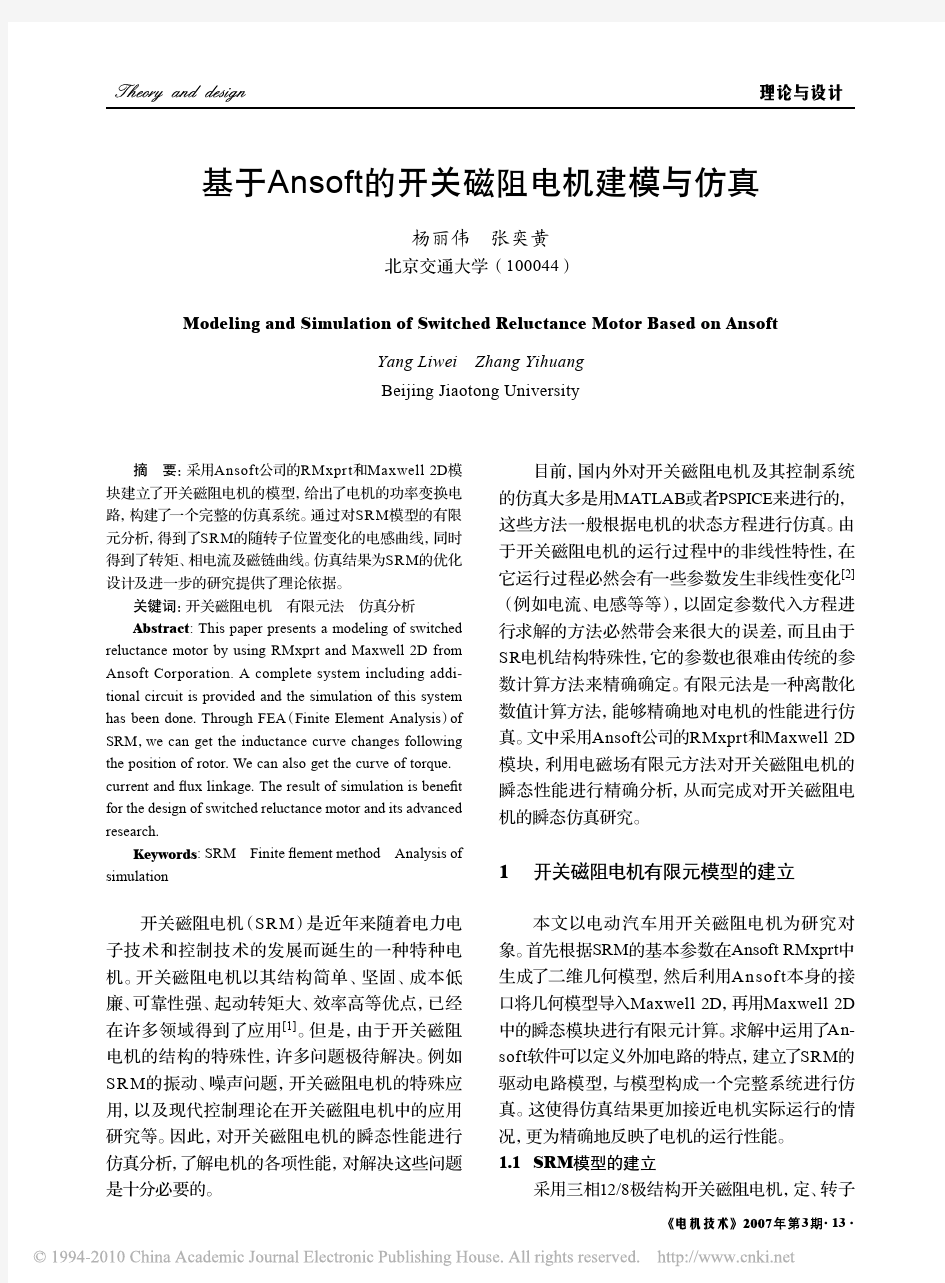
开关磁阻电机的原理及其控制系统 开关磁阻电机80年代初随着电力电子、微电脑和控制理论的迅速发展而发展起来的一种新型调速驱动系统。具有结构简单、运行可靠、成本低、效率高等突出优点,目前已成为交流电机调速系统、直流电机调速系统、无刷直流电机调速系统的强有力的竞争者。 一、开关磁阻电机的工作原理 开关磁阻电机的工作原理遵循磁磁阻最小原理,即磁通总是要沿着磁阻最小路径闭合。因此,它的结构原则是转子旋转时磁路的磁阻要有尽可能大的变化。所以开关磁阻电动机采用凸极定子和凸极转子的双凸极结构,并且定转子极数不同。 开关磁阻电机的定子和转子都是凸极式齿槽结构。定、转子铁芯均由硅钢片冲成一定形状的齿槽,然后叠压而成,其定、转子冲片的结构如图1所示。
图1:开关磁阻电机定、转子结构图 图1所示为12/8极三相开关磁阻电动机,S1. S2是电子开关,VD1, VD2 是二极管,是直流电源。 电机定子和转子呈凸极形状,极数互不相等,转子由叠片构成,定子绕组可根据需要采用串联、并联或串并联结合的形式在相应的极上得到径向磁场,转子带有位置检测器以提供转子位置信号,使定子绕组按一定的顺序通断,保持电机的连续运行。电机磁阻随着转子磁极与定子磁极的中心线对准或错开而变化,因为电感与磁阻成反比,当转子磁极在定子磁极中心线位置时,相绕组电感最大,当转子极间中心线对准定子磁极中心线时,相绕组电感最小。 当定子A相磁极轴线OA与转子磁极轴线O1不重合时,开关S1, S2合上,A 相绕组通电,电动机内建立起以OA为轴线的径向磁场,磁通通过定子扼、定子极、气隙、转子极、转子扼等处闭合。通过气隙的磁力线是弯曲的,此时磁路的
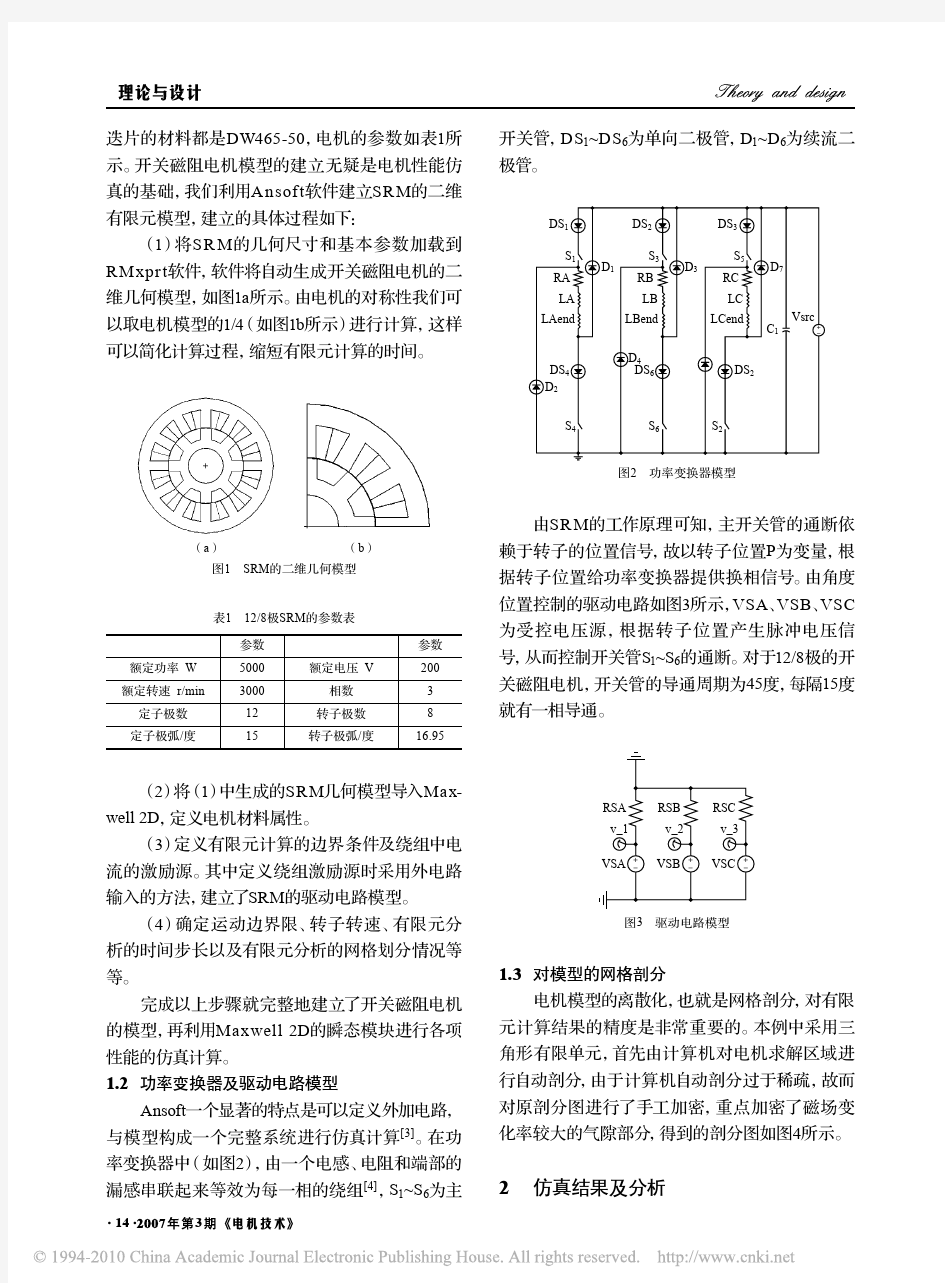
开关磁阻电机 一、概述 开关磁阻电动机结构简单、可靠性高、恒转矩、恒功率而且调速性能好(覆盖功率范围10W~5MW的各种高、低速驱动调速系统)、价格便宜、鲁棒性好等优点引起了各国电气传动界的广泛重视,由其构成的调速系统兼有直流传动和普通交流传动的优点,是继变频调速系统、无刷直流电动机调速系统的最新一代无级调速系统。这种新型调速系统使开关磁阻电机存在许多潜在的领域,在各种需要调速和高效率的场合均能得到广泛使用。 开关磁组电机调速系统之所以能在现代调速系统中异军突起,主要是因为它卓越的系统性能,主要表现在: (1) 电动机结构简单、成本低、可用于高速运转。 (2)功率电路简单可靠。 (3)系统可靠性高。 (4)起动转矩大,起动电流低。典型产品的数据是:起动电流为额定电流的15%时, 获得起动转矩为100%的额定转矩;起动电流为额定电流的30%时,起动转矩叮 达其额定转矩的250%。 (5)适用于频繁起停及正反向转换运行。 (6)可控参数多,调速性能好。控制开关磁阻电动机的主要运行参数和常用方法至少 有四种:相导通角、相关断角、相电流幅值、相绕组电压。 (7)效率高,损耗小。以3kw SRD为例,其系统效率在很宽范围内都是在87% 以上,这是其它一些调速系统不容易达到的。 (8)可通过机和电的统一协调设计满足各种特殊使用要求。 二、开关磁阻电动机的结构 图1-1开关磁阻电机结构图
典型的三相开关磁阻电动机的结构如图1-1所示。其定子和转子均为凸极结构,图示电机的定子有8个极,转子有6个极。定子极上套有集中线圈,两个空间位置相对的极 上的线圈顺向串联构成一相绕组,图2-1中只画出了A相绕组;转子由硅钢片叠压而成,转子上无绕组。该电机则称三相8/6极开关磁阻电动机。在结构形式及工作原理上,开关磁阻电动机与大步距反应式步进电机并无差别;但在控制方式上步进电机应归属于他控式变频,而开关磁阻电动机则归属于自控式变频;在应用上步进电机都用作“控制电机”而开关磁阻电机则是拖动用电机,因此电机设计时所追求的目标不同而使电机的设计参数不同。 与反应式步进电动机相似,开关磁阻电动机是双凸极可变磁阻电动机。图1-1给出了以8/6极开关磁阻电机为例的结构原理图,图中仅给出了一相的绕组及外围功率开关电路,从这个结构原理图中可以清晰的看到,开关磁阻电动机是双凸极结构,其转子上没有任何形式的绕组,也无永磁体,而定子上只有简单的集中绕组,其中径向相对的两个绕组构成一相。电动机每一相中流过的电流是由外围功率开关电路中的开关根据转子位置的变化,进行相应的通断而获得的。 图1-1中给出的开关磁阻电动机是四相的,通常情况下开关磁阻电动机可以设计成多种不同相数的结构,如两相、三相、四相或更多相,当相数增加时其结构将变得更复杂,相应的外围电路所使用的器件也相应增加。开关磁阻电动机极数的设计也有多种形式,但是定、转子极数和相数要遵循一定的关系。即定子极数应为相数的2倍或2的整数倍; 而转子极数应不等于定子极数且一般转子极数少于定子极数但都是偶数极[2]。由于开关磁阻电动机相数与极数的设计,低于三相的电动机没有自起动能力,对于有自启动、四象限运行要求的驱动场合,应选用表1-1所对应的定、转子极数组合方案。 表2-1 开关磁阻电动机各种方案
题目:开关磁阻电机
开关磁阻电机 学习《特种电机及其控制》这门课程,这要介绍了无刷直流电机及其控制、开关磁阻电机及其控制系统、步进电机及其控制,其中我最感兴趣的开关磁阻电机。下面我将对我所了解的开关磁阻电机做一总结。 一、发展背景 开关磁阻电机是80年代初随着电力电子、微电脑和控制技术的猛烈发展而发展起来的一种新型调速驱动系统,具有结构简单、运行可靠及效率高等突出优点,成为直流电机调速系统、交流电机调速系统和无刷直流电机调速系统强有力的竞争者,引起各国学者和企业界的广泛关注,目前开关磁阻电机已开始应用于工业、航空业和家用电器等各个领域。 开关磁阻电机的基本概念可追溯到19世纪40年代,1842年,英国的Aberdeen和Dafidson用两个U型电磁铁制造了由蓄电池供电的机车电动机。20世纪60年代,大功率晶闸管的出现为SR电机的研究发展提供了重要的物质条件。1967年,英国的Leeds大学开始对SR电机进行深入研究;直到1970年左右,研究结果表明:SR电机可以在单相电流下四象限运行,功率变换器无论是用晶体管还是用普通晶闸管,所需开关数都是最少的;电动机成本也明显低于同容量的感应电动机。20年代70年代初,美国福特公司研制出最早开关磁阻电机的调速系统,其结构为轴向气隙电动机,具有电动机和发电机运行状态和较宽范围调速的能力,适合于蓄电池供电的电动车辆的转动。1980年Leeds大学的Lawrenson教授及其同事总结出了自己的研究成果,发表了题为“Variable--Speed Switched Reluctance Motors”的论文,系统阐述了开关磁阻电机的基本原理与设计特点,并得出了新型磁阻电机的单位出力可以与交流感应电机相媲美甚至还略占优势的结论。1983年英国TASC公司推出了Oulton系列通用SRD调速产品,问世不久便受到了各国电气传动界的广泛重视。从1984年开始,我国许多单位先后开展了SRD研究,在借鉴国外经验的基础上,我国SR电机的研究发展很快。2000年,国内100KW以上的SR电机已应用于煤矿的采煤机,目前已将180KW的SR电机应用于地铁机车的牵引,应形成一些SRD系列商品,最
开关磁阻电机控制系统软件设计 开关磁阻电机SRM(Switched Reluctance Motor)是随着电力电子、微电脑和控制技术的迅猛发展而出现的一种新型调速系统,具有结构简单、运行可靠及效率高等突出优点,成为交流、直流和无刷直流电动机调速系统强有力的竞争者,引起各国学者和企业的广泛关注。 1 基本控制策略 开关磁阻电机基本控制策略主要包括电流斩波控制(CCC)、电压PWM 控制、角度位置控制(APC)三种控制策略。 电流斩波控制的优点是可限制电流峰值的增长,保护开关器件的安全,并起到良好有效的调节效果,因此适用于低速调速系统。当相电流超过约定的上限电流值时,则主开关关断,当相电流低于约定的下限电流值时,则组合开关开通,从而实现电流斩波控制效果。 电压PWM控制是通过调整占空比,来调节相绕组的平均电压,以改变相绕组电流的大小,从而实现转速和转矩的调节,电压PWM控制的特点是通过调节相绕组电压的平均值,进而能间接地限制和调节相电流,因此既能用于高速调速系统,又能用于低速调速系统,而且控制也较简单。 角度位置控制是指对开通角和关断角的控制。它的实质就在于输入电压保持不变而通过改变主开关的开通角和关断角来调节电流,以达到调节电机转矩的目的。角度控制的优点是转矩调节范围较大,可允许多相同时通电,以增加电机输出转矩,可实现效率最有控制和转矩
最优控制。 为了实现开关磁阻电机良好的调速性能,该软件设计采用以下组合控制策略,即电机基速以下运行时,采用电流斩波控制方式;在中低速下,采用电压PWM控制方式;而在高速运行时,采用角度位置控制方式。 2 软件设计 软件采用前后台系统作为软件框架,分为主程序和中断程序两部分,相较于现有控制系统软件设计中的多中断程序,该软件设计仅采用了一个定时中断,是程序更简洁,增加了程序的可读性及可移植性,同时也有利于程序的进一步扩充与完善。现有控制系统软件中多数使用多中断设计,其中包括计算电机转速使用的捕获中断,获取电机位置使用一路或两路外部中断,电流采样时使用的DMA中断,以及一至两个定时中断,这些中断不仅增加了程序的复杂性,同时也降低了软件的可靠性。 在软件设计中,重点和难点就是如何获得较好的斩波效果,而软件设计的好坏直接影响了斩波效果的好坏。在现有的软件设计中,一般是将各相电流通过ADC采样,再经DMA通道传输,同时产生一个DMA 中断,然后在一个定时中断(定时中断时间一般为50us至100us)中实现电流斩波。而这种设计会产生两个问题。其一,因为要实现其他功能,定时中断时间不能进一步缩短,而这对电流斩波而言,时间间隔又太长,以50us为例,电流可能会在50us的时间中上升40A。其二,DMA中断优先级要高于定时中断,这可能会导致定时中断的执
开关磁阻电动机驱动系统(SRD)简介 开关磁阻电动机驱动系统(SRD)是较为复杂的机电一体化装置,SRD的运行需要在线实时检测的反馈量一般有转子位置、速度及电流等,然后根据控制目标综合这些信息给出控制指令,实现运行控制及保护等功能。转子位置检测环节是SRD的重要组成部分,检测到的转子位置信号是各相主开关器件正确进行逻辑切换的根据,也为速度控制环节提供了速度反馈信号。开关磁阻电机具有再生的能力,系统效率高。对开关磁阻电机的理论研究和实践证明,该系统具有许多显著的优点:(1)电机结构简单、坚固,制造工艺简单,成本低,可工作于极高转速;定子线圈嵌放容易,端部短而牢固,工作可靠,能适用于各种恶劣、高温甚至强振动环境。(2)损耗主要产生在定子,电机易于冷却;转子无永磁体,可允许有较高的温升。(3)转矩方向与电流方向无关,从而可最大限度简化功率变换器,降低系统成本。(4)功率变换器不会出现直通故障,可靠性高。(5)起动转矩大,低速性能好,无感应电动机在起动时所出现的冲击电流现象。(6)调速范围宽,控制灵活,易于实现各种特殊要求的转矩-速度特性。(7)在宽广的转速和功率范围内都具有高效率(8)能四象限运行,具有较强的再生制动能力。(9)容错能力强。开关磁阻电机的容错体现在电机某一相损坏,电机照样可以运行。与当前广泛应用的变频调速感应电动机相比,开关磁阻电机在成本、效率、调速性能、单位体积功率、可靠性、散热性等都具有明显的优势或竞
争力。如果说第一代开关磁阻电机(1983年研制)在小功率范围的效率比高效变频调速感应电动机低,第二代开关磁阻电机(1988年研制)的效率已全面超过了高效变频调速感应电动机。更难得的是,开关磁阻电机在宽广的速度和功率范围内都能保持较高的效率,这是变频调速感应电动机难以比拟的。感应电动机要取得与直流电机相近的调速特性需采用复杂的矢量控制系统,而开关磁阻电机通过调整开通角、关断角、电压和电流,可以得到不同负载要求的机械特性,控制简单、灵活,能容易地实现软启动和四象限运行,而且由于这是一种纯逻辑的控制方式,很容易智能化,通过修改软件调整电机工作特性满足不同应用要求。由于开关磁阻电机固有的转矩波动,可能导致较大的噪声和振动,事实上这种情况的发生往往与电机设计和控制的不合理相关,通过优化电机设计和控制策略,转矩波动和噪声完全可以得到有效的抑制,正确认识到这一点对开关磁阻电机的开发和应用是很重要的。SRD Ltd.公司开发的伺服应用开关磁阻电机,转矩波动仅为0.05%。近年研究的最优励磁控制策略、两次换流控制策略、电机噪声根源、定子振动模态、定子固有频率计算等成果对降低电机噪声都有积极的促进作用。随着设计和制造水平的提高,噪声必将进一步降低。三、开关磁阻电机的应用近年来,开关磁阻电机的应用和发展取得了明显的进步,已成功地应用于电动车驱动、通用工业、家用电器和纺织机械等各个领域,功率范围从10W到5MW,最大速度高达100000 r/min。3.1 电动车应用开关磁阻电机最初的应用领域就是电动车。目前电动摩托车和电动自行车的驱动电机主要有永磁
开关磁阻电机驱动系统的运行原理及应用(二) (低轴阻发电机参考资料) 1 引言 开关磁阻电机驱动系统(SDR)具有一些很有特色的优点:电机结构简单、坚固、维护方便甚至免维护,启动及低速时转矩大、电流小;高速恒功率区范围宽、性能好,在宽广转速和功率访问内都具有高输出和高效率而且有很好的容错能力。这使得SR电机系统在家用电器、通用工业、伺服与调速系统、牵引电机、高转速电机、航空航天等领域得到广泛应用。 SR电机是一种机电能量转换装置。根据可逆原理,SR电机和传统电机一样,它既可将电能转换为机械能—电动运行,在这方面的理论趋于成熟;也可将机械能转换为电能—发电运行,其内部的能量转换关系不能简单看成是SR电动机的逆过程。本文将从SR电机电动和发电运行这两个角度阐述SR电机的运行原理。 2 电动运行原理 2.1 转矩产生原理 控制器根据位置检测器检测到的定转子间相对位置信息,结合给定的运行命令(正转或反转),导通相应的定子相绕组的主开关元件。对应相绕组中有电流流过,产生磁场;磁场总是趋于“磁阻最小”而产生的磁阻性电磁转矩使转子转向“极对极”位置。当转子转到被吸引的转子磁极与定子激磁相相重合(平衡位置)时,电磁转矩消失。此时控制器根据新的位置信息,在定转子即将达到平衡位置时,向功率变换器发出命令,关断当
前相的主开关元件,而导通下一相,则转子又会向下一个平衡位置转动;这样,控制器根据相应的位置信息按一定的控制逻辑连续地导通和关断相应的相绕组的主开关,就可产生连续的同转向的电磁转矩,使转子在一定的转速下连续运行;再根据一定的控制策略控制各相绕组的通、断时刻以及绕组电流的大小,就可使系统在最隹状态下运行。 图1 三相sr电动机剖面图 从上面的分析可见,电流的方向对转矩没有任何影响,电动机的转向与电流方向无关,而仅取决于相绕组的通电顺序。若通电顺序改变,则电机的转向也发生改变。为保证电机能连续地旋转,位置检测器要能及时给出定转子极间相对位置,使控制器能及时和准确地控制定子各相绕组的通断,使srm能产生所要求的转矩和转速,达到预计的性能要求。 2.2 电路分析
第二章开关磁阻电机及其调速系统 2.1 开关磁阻电机的发展概况 磁阻式电机诞生于160年前,一直被认为是一种性能不高的电机。然而通过近20年的研究与改进,使磁阻式电机的性能不断提高,目前已能在较大功率范围内不低于其它型式的电机[9]。 70年代初,美国福特电动机(Ford Motor)公司研制出最早的开关磁阻电机调速系统。其结构为轴向气隙电动机、晶闸管功率电路,具有电动机和发电机运行状态和较宽范围调速的能力,特别适用于蓄电池供电的电动车辆的传动。 70年代中期,英国里兹(Leeds)大学和诺丁汉(Nottingham)大学,共同研制以电动车辆为目标的开关磁阻电机调速系统。样机容量从10W至50KW,转速从750 r/min至10000 r/min,其系统效率和电机利用系数等主要指标达到或超过了传统传动系统。该产品的出现,在电气传动界引起了不小的反响。在很多性能指标上达到了出人意料的高水平,整个系统的综合性能价格指标达到或超过了工业中长期广泛使用的一些变速传动系统。 近年来,国内外已有众多高校、研究所和企业投入了开关磁阻电机调速系统的研究、开发和制造工作。至今已推出了不同性能、不同用途的几十个系列的产品,应用于纺织、冶金、机械、汽车等行业中。 目前,在汽车行业意大利FIAT公司研制的电动车和中国第二汽车制造厂研制的电动客车都采用了开关磁阻电机。SRM是没有任何形式的转子线圈和永久磁铁的无刷电动机,它的定子磁极和转子磁极都是凸的。由于SRM具有集中的定子绕组和脉冲电流,其功率变换器可以采用更可靠的电路拓扑形式。SRM具有简单可靠、在较宽转速和转矩范围内高效运行、控制灵活、可四象限运行、响应速度快、成本较低等优点,这是其它调速系统难以比拟的,作为具有潜力的电动车电气驱动系统日益受到重视。然而目前SRM还存在转矩波动大、噪声大、需要位置检测器、系统非线性等缺点,所以,它的广泛应用还受到限制。 2.2 开关磁阻电机的基本结构与特点 开关磁阻电机为定、转子双凸极可变磁阻电机。其定、转子铁心均由硅钢片
开关磁阻电机研究的背景及意义
一、项目目的与意义 开关磁阻电机设计及其在矿山机械中的应用研究项目属于《国家中长期科学和技术发展规划纲要(2006-2020)》中工业节能(机电产品节能)、基础件和通用部件的重点支持领域,同时符合《湖南省加快培育和发展战略性新兴产业总体规划纲要》高效节能制造产业中节能电机重点发展领域。 开关磁阻电动机(SRD)调速系统是基于计算机和电力电子技术的控制器及开关磁阻电动机的新型调速系统,由开关磁阻电动机与微机智能控制器两个部分组成。开关磁阻电动机调速系统的突出特点是效率高、节能效果好、调速范围广、无启动冲击电流、启动转矩大、控制灵活,此外还具有结构简单、坚固可靠、成本低等优点。除可以取代已有的电气传动调速系统(如直流调速系统、变频调速系统)外,开关磁阻电动机调速系统还十分适用于矿山井下机电设备需要重载启动、频繁启动、正反转、长期低速运行的应用场合,如无极绳牵引车、电牵引采煤机、刮板输送机等。 据有关资料统计,我国煤矿辅助运输职员约占井下职工总数的1/3,且矿井每采百万吨煤需要1200 ~ 1500名职工从事辅助运输,用工量是发达国家的7 ~ 10倍。其主要原因就是我国煤矿辅助运输系统落后,效率太低,大多数煤矿的辅助运输系统仍然是小绞车、小蓄电池机车等多段分散落后的传统方式,严重影响矿井生产效率和煤矿安全生产。随着当前大中型矿井的建设,矿井辅助运输设计与选型是矿井建设的重要课题之一,提高矿井辅助运输的装备水平对确保矿井生产产量进步具有极其深远的意义。 目前,我国矿用机械交流电动机采用较多的调速方式主要有交流变频调速和开关磁阻电动机调速。交流变频技术硬件成本较高、控制电路复杂且不宜进行维护和维修,特别是国内的公司现在还未能很好地掌握变频器核心技术,产品基本上依靠国外进口,不能针对矿井特殊的应用条件将变频器加以改进和设计,较难适应矿用要求。开关磁
第17卷 第6期山 西 煤 炭V o l.17 No.6 1997年12月SHA N XI CO A L Dec.1997 开关磁阻电机开发应用和 亟待解决的问题 马 莉 陈国林 (太原理工大学) (太铁分局水电段) 摘 要 介绍一种新型的无级调速系统——开关磁阻电动机调速系统在我国开发应用的情况。阐述了该种电机在某些机械上的应用优势,同时提出了该种电机存在的某些技术问题亟待解决。 关键词 恒转矩;恒功率;速度稳定性 0 引 言 一种新型的调速系统——开关磁阻电机调速系统的兴起和发展,引起了国内外电工界的广泛关注。它是由开关磁阻电机(Sw itched Reluctance Mo to r)和电子馈电器组成,是典型的机电一体化的调速系统。开关磁阻电动机的调速性能可与直流电动机调速媲美,可控参数多,损耗小,效率高,起动电流小,起动转矩大;但结构比直流电机简单得多,无换向器和电刷,甚至比鼠笼型异步电动机还简单。转子无绕组,工作可靠,坚固耐用,特别适于在恶劣环境中使用。并且能实现高速运转(105r/min),这一特点是任何种类电机难以实现的,因此具有广阔的应用前景。 1 开发应用情况 我国是从80年代初开始进行开关磁阻电机调速的研究工作,十几年来国内的一些高等学校和科学研究院、科研所竞相研制开发,起步虽较晚,但发展的速度较快。目前已研制出0.2kW、0.55kW、0.75kW、1.1 kW、1.5kW、2.2kW、5.5kW、7.5kW、15kW、22kW、30kW功率等级的SR电机,电压等级为110V、127V、220V、380V.这些SR电机的底座安装尺寸及外型尺寸与Y系列4极笼型三相异步电动机完全相同,便于用户安装使用。 我国自行研制的SR电机调速系统,已应用于几个工业部门的十几种机械上,现列举应用实例。 1.1 SR电动机用于涤纶抽丝机 一般抽丝机采用直流电机调速系统拖动,调速性能优良的直流电动机完全能满足涤纶抽丝机的技术要求,但存在的问题是直流电机的换向器和电刷之间产生火花,在抽丝机负载变化大时,换向器出现严重的环火。SR电动机替换直流电动机后,根除了存在的问题。转速精度为±1.5r/min,完全满足涤纶抽丝机的技术要求;并且SR电机调速系统用于涤纶机的第1、2、3道牵伸机的成 本文第一作者:马 莉,女,1953年生,太原理工大学图书馆,馆员,030024 文稿收到日期:1996—08—19
开关磁阻电机的基本学习内容 1 开关磁阻电机的基本原理以及结构 开关磁阻电动机(Switched Reluctance Motor ,简称SRM) 定转子为双凸极结构,铁心均由普通硅钢片叠压而成,其定子极上有集中绕组,径向相对的两个绕组串联构成一相,转子非永磁体,其上也无绕组[1,3]。SRM 的定转子极数必须满足如下约束关系: s r s N =2km N = N + 2k (1-1) 其中,Ns ,Nr 分别为电机定、转子数;m 为电机相数值减1;k 为一常数。以下图1-1所示一个典型四相8/6极SRM 为例,相数为4,因而m=3,取k=1,则Ns=6,Nr=8。m 及k 值越高,越利于高控制性能控制,但相应成本越高,结构越复杂。目前技术较为成熟,发展较为迅速的产品多为三、四相SRM [2]。
图1-1即为一典型四相8/6结构的SRM电机本体及其不对称功率变换器主电路的示意图(图1-1在末尾手画)。为表述清晰,图中仅画出不对称半桥电路的一相,其他各相均与该相相同,并省略了相应的驱动及检测电路。完整的开关磁阻电机调速系统(Switched Reluctance Motor Drive,简称SRD)则由SRM、功率变换器、控制器、位置检测器等四大部分组成,如下图1-2示。 SRM可以认为是同步电机的一个分支,它运行时遵循磁阻最小原理,同步进电机较为类似[2,30]。其具体运行原理如下:首先要保证励磁相的定子凸极和最近的转子凹极中心线不重合,也即初始位移不能位于磁阻最小位置。通以交流电后,经过一个整流桥变为直流电源,当开关S1和S2开通时,AA’相通电励磁,产生一个磁拉力。在该电磁力的轴向分量作用下,产生电磁转矩,凸极转子铁心趋向于旋转到定转子极轴线B-B’与A-A’重合的位置;而电磁力的径向力分量则造成定子的“变形”,这也是产生转矩脉动和电机噪声的根本原因之一。在该过程中电机吸收电能。关断S1和S2,开通BB’相,此时AA’相经续流二极管VD1、VD2将电能回馈给电源,同时BB’相趋向运行到定转子极轴线C-C’与B-B’重合的位置。以此类推,顺次给A→B→C→D相循环励磁,在惯性和轴向力的作用下,转子将一直逆着励磁顺序旋转,从而完成自同步运行。同理若改变励磁顺序为C→B→A→D,则转子沿顺时针方向转动。由此可以看出, SRM与直流电机不同,其运行方向与相电流方向无关,而仅与相绕组通电顺序有关。 图1-2开关磁阻电机调速系统构成
2010 年5 月 摘要 开关型磁阻电动机驱动系统(Switched Reluctance Drive,简称SRD电动机)。是20世纪80年代迅猛发展起来的一种新型调速电机驱动系统。它是由功率变换电路、双凸极磁阻电机、控制器及位置检测器构成。它的结构极其简单,调速范围宽,调速性能优异,而且在整个调速范围内都具有较高的效率,系统可靠性高,是各国研究和开发的热点之一。 本文介绍了开关磁阻电机的发展历史,应用领域以及它的优点;对三相6/4结构的开关磁阻电机与四相8/6结构的开关磁阻电机进行了比较;对开关磁阻电机的电磁设计与参数优化进行了分析与研究,简单介绍了ANSYS软件在开关磁阻电机电磁分析中的应用;提出8/6结构开关磁阻电机的一种设计方案;并对开关磁阻电机的磁通波形和电机损耗进行了分析。 关键词: 开关磁阻电机,磁场,电磁设计,参数优化
ABSTRACT The switched reluctance drive (SRD) is a new-type drived-electromotor system which develops rapidly since 1980, and consists of power converter circuits、the doubly-salient reluctance motor、the controller and the examination of position. The structure of the SRD is simple. It has a wide range and excellent performance in speed. It also has a high efficiency and high reliability. So the SRD is one of the hot spots which is studied and designed all over the world. This thesie introduced the SRD development history, the application domain as well as its merit; comparison to the three-phase 6/4 structure SRD with four-phase 8/6 structure SRD overall performance. also analysis and research SRD electromagnetism design and parameter optimization, and introduced ANSYS software in SRD electromagnetism analysis application; Proposes 8/6 structure SRD one kind of design proposal; And analysis to the switched reluctance drive magnetic flux profile and the loss of machine. Keywords:switched reluctance motor, magnetic field, electromagn- etism design, parameter optimization
对具有不同绕组结构的四相8/6极开关 磁阻电机的性能仿真 李洁孙鹤旭刘艺 河北工业大学天津 300130 【摘 要】开关磁阻电机的控制方法包括单相导通和两相导通,两相导通方式与单相导通方式相比,避免了绕组的突然切换,大大减小了电机的转矩波动,降低了电机的噪声并且提高了电机 的输出转矩。本文介绍了两种常用的绕组排列方式,用于两相导通的四相8/6开关磁阻电 机。传统的四相8/6开关磁阻电机绕组连接方法可以产生N-N-N-N-S-S-S-S的定子磁极布 局,磁链穿过定子轭和转子铁芯将相对的励磁定子极连接起来。还可以利用短磁路原理将 绕组排列产生N-N-S-N-S-S-N-S的定子磁极布局,短磁路绕组布局利用相间互感激发产生 若干短磁通回路。利用Maxwell2D对具有此两种不同绕组结构的开关磁阻电机进行仿真, 介绍了仿真建模的过程。研究了具有常规绕组和产生短磁路绕组的两台四相8/6开关磁阻 电机的静态特性、动态特性和铁芯损耗,并进行了比较。对比结果表明,具有产生短磁路 绕组布局的开关磁阻电机性能更佳,通过仿真得到了验证。 【关键词】开关磁阻电机绕组结构仿真 Modeling and Simulation of Four-Phase 8/6 Switched Reluctance Motor With Different Winding Configurations Li Jie Sun Hexu Liu Yi Hebei University of Technology,Tianjin 300130,China Abstract:This paper presents two winding configurations,one of which stimulates short flux loops to improve performance of four-phase 8/6 switched reluctance motor with two phases excited. Conventional winding configuration of four-phase 8/6 SRM with two phases excited is arranged that stimulates the N-N- N-N-S-S-S-S stator pole layout mode. The presented winding configuration is arranged that stimulates the N-N-S-N-S-S-N-S stator pole layout mode which use mutual coupling to encourage several short flux paths. The simulate process of the SRM with two different winding constructer based on the Maxwell 2D software package are presented. The motors’ static characteristics and dynamic performance have been investigated and compared. Simulation results show that the motor with the winding configuration that stimulates the short loops has an inherent advantage,and the performance of the motor is evaluated and validated by simulation. The results form the basis for design considerations that can optimize performance of the motor. Key words:switched reluctance motor;winding configuration;simulation 基金项目:国家863项目(2006AA040306) 作者简介:李洁(1981—),女,博士研究生,研究方向为电气工程及其自动化。 通信作者:孙鹤旭(1955—),男,博士,教授,研究方向为电气工程。
开关磁阻电机的特性及在家电业的应用 吴建华浙江大学电机及其控制研究所,杭州310027 摘要开关磁阻电机是一种新型高效调速驱动系统,可广泛应用于家用电器、通用工业和电动车驱动等各个领域。本文阐述了开关磁阻电机的工作原理和特点,以及在家电行业的应用概况,并与变频调速电机作了比较。 关键词开关磁阻电机,变频电机,家用电器,应用 1 概述 开关磁阻电机是80年代初随着电力电子、微电脑和控制技术的迅猛发展而发展起来的一种新型调速驱动系统,具有结构简单、运行可靠及效率高等突出特点,成为交流电机调速系统、直流电机调速系统和无刷直流电机调速系统的强有力的竞争者,引起各国学者和企业界的广泛关注。跨国电机公司Emerson电气公司还将开关磁阻电机视为其下世纪调速驱动系统的新的技术、经济增长点。目前开关磁阻电机已广泛或开始应用于工业、航空业和家用电器等各个领域。随着对开关磁阻电机认识的深入,其应用必将更为普遍。本文简要介绍了开关磁阻电机的工作原理和特点,以及在家电业的应用概况。 2 工作原理和特点 图1 开关磁阻电机的典型结构原理图 图1所示是开关磁阻电机的典型结构原理图,电机为双凸极结构。转子仅由叠片叠压而成,既无绕组也无永磁体;定子各极上绕有集中绕组,径向相对极的绕组串联,构成一相。其工作原理遵循“磁阻最小原理”——磁通总是要沿磁阻最小的路径闭合,因磁场扭曲而产生磁阻性质的电磁转矩。顺序给A-B-C-D相绕组通电,则转子便按逆时针方向连续转动起来。当主开关管S1、S2导通时,A相绕组从直流电源V吸收电能;而当S1、S2关断时,绕组电流通过续流二极管D1、D2,将剩余能量回馈给电源V。因此,开关磁阻电机具有再生的能力,系统效率高。对开关磁阻电机的理论研究和实践证明,该系统具有许多显著的特点: (1)电机结构简单、坚固,制造工艺简单,成本低,可工作于极高转速;定子线圈嵌放容易,端部短而牢固,工作可靠,能适用于各种恶劣、高温甚至强振动环境。 (2)损耗主要产生在定子,电机易于冷却;转子无永磁体,可允许有较高的温升。 (3)转矩方向与电流方向无关,从而可最大限度简化功率变换器,降低系统成本。
在现有的电动自行车应用方案中,霍尔传感器信号的采样、比较操作都是通过软件进行,存在一定的换相误差,当使用高速直流无刷电机的时候,尤其明显。在此本文提出了一种基于英飞凌XC866/846的CCU6E 模块实现硬件霍尔信号滤波的方案,并可现同步整流控制,提高换相准确性。 关键词:电动自行车,硬件霍尔滤波,同步整流 1. 前言 电动自行车作为一种环保的交通工具,已经得到了越来越广泛的使用。直流无刷电机及控制器作为电动自行车中的关键部件,其性能决定了整个系统的电能转换效率。控制器根据霍尔传感器输出信号,驱动3相全桥电路,实现对直流无刷电机的控制,因此霍尔信号的准确性及换相的实时性会直接影响电机的性能。在现有电动自行车控制器方案中,霍尔传感器信号的采集均采用软件扫描形式进行,换相操作也通过软件处理,换相误差大,实时性差,尤其对中高速电机尤为明显。而英飞凌公司的XC866/846可以支持硬件霍尔信号采集、换相操作,且无需额外电路即可实现同步整流控制,单片机利用率高,电机控制性能好。 2. 直流无刷电机控制 传统的直流无刷电机采用梯形波驱动方式,系统结构框图如图1a所示,MCU根据三个霍尔传感器信号,调制PWM输出,PWM驱动波形如图1b所示,由于在这种控制方式下,电机端电压波形为梯形波,因此也称为梯形波控制。从图1 中可以看出,PWM输出存在6种状态,对于每种状态,逆变桥的6个功率管中仅有2个工作,例如当状态等于5时,CC60 和COUT62对应通道开通。 图1 直流无刷电机控制拓扑结构及PWM驱动信号波形在PWM开通和关断期间,逆变桥内的电流如图2所示(以状态5为例)。当PWM开通时,电流经过M1,经过电机及M6返回电源。当PWM关闭时,续流电流经由D2(M2中的寄生二极管)、电机相线和M6返回电源。由于二极管D2的导通压降为0.6-1V左右,因此续流电流在这个二极管上会产生较大的损耗,当电机负载大,续流电流大的时候,损耗问题更加严重,影响逆变器效率。
开关磁阻电机在风力发电中的应用 发电机是风力发电机组中将机械能转化成电能的装置,是将绦动力与输出电畿连接的工具,它不仅直接影响到输出电能的质量和效率,也影响到整个风电转换系统的性能和结构。因此,研制和选用适合于风瞧转换、运行可靠、效率高、控制性能良好的发电机系统是风力发电工作的重要组成部分。目前在风电市场,永磁同步电机和无刷双馈电机是应用的主流。近年来,随着风力发电的快速发展,开关磁阻风力发电机的研究取得了一定的进展。 开关磁阻电机是磁阻电机与现代电力电子技术!微机控制技术相结合的产物,它既继承了磁阻电机结构简单坚固的优点,又在高速发展的电力电子和微机控制技术的支持下获得了良好的可控性以及较高容错能力。因此,它在驱动调速领域得到了广泛的应用,同时也在发电领域,如航天启动、发电系统和风力发电系统等应用方面,得到越来越多的重视。 开关磁阻电机具有结构简单、运行可靠、成本低、效率高、调速范围宽、控制灵活等优点, 已在诸多工业领域的调速和传动得到应用。1986 年,英国的N. N. Fulton 首先提出开关磁阻发电机并进行了开关磁阻风力发电机研究,之后R. Cardenas 等人研制成7. 5 kW 开关磁阻风力发电机。目前国外仍未有实用的开关磁阻风力发电机组投入使用(2004)。而国内对开关磁阻风力发电机的研究起步较晚,目前有中国矿业大学、南京航空航天大学及浙江大学等正在从事相关的研究,主要进行理论研究与实验验证方面的工作。 1、开关磁阻发电机适于风力发电的特点: 普通的发电机如:异步发电机、感应发电机、永磁发电机要输出固定电压,其转速也须固定,然而风速是时刻变化的,所以风轮机的转速必须固定不变(即恒速恒频发电系统),导致风能利用效率低下。显然,如果使用变速发电机就能提高风能利用效率(即变速恒频发电系统),而开关磁阻发电机正满足了这样的要求。 设计风力发电系统一般需要着重考虑以下几个问题: ( 1) 地将不断变化的风能高质量转换为频率、电压恒定的交流电或电压恒定的直流电。( 2) 高效率的实现两种能量转换,以降低每度电的成本。 ( 3) 稳定可靠的同电网、柴油发电机及其他发电装置或储能系统联合运行,为用户提供稳定的电能。 据此衡量开关磁阻发电机,可以发现开关磁阻发电机用于风力发电的优势: ( 1) 开关磁阻发电机可以方便的发出电压恒定的直流电,尤其对于它励方式,输出电压直接由励磁电压决定,而与转速无关。在自励方式下,也可以通过自身的控制器实现电压恒定。 ( 2) 开关磁阻发电机结构简单,转子上无刷、无绕组、无永久磁体,因此,成本低廉;不存在铜耗,发电效率高;同时转子的转动惯量小,启动转矩低,动态性能好。并且该系统是自同步运行,低频时,不会出现那种变频供电的感应电机在低频时出现的不稳定和振荡问题。因此即使在风速较低的情况下,通过合理的设计。开关磁阻发电机也可以在风力直接驱动下实现较高的发电效率,从而省去了齿轮箱,系统结构更加轻便、可靠,这也正是风力发电系
MATLAB 下开关磁阻电机的线性模型及仿真 对MATLAB 的介绍已经有很多。其仿真结果都以文档的形式保存,这些文档包括结构图和相应功能的函数。在MATLAB 环境下,我们建立了开关磁阻电机的模型,并利用滞环电流控制方式,得出稳态运行情况来验证模型的正确性。 I 介绍 对整个系统进行仿真是很有必要的,在仿真过程中我们可以发现问题、验证可行性以及分析实验结果。系统的仿真是设计和实验室实现的重要指标。 通过一些软件可以实现SRM 的动态仿真,像C 语言,Fortran 语言,还有ACSL (连续系统仿真语言)。甚至还有一些用于仿真电网系统的语言如EMTDC 和EMTP 。这些语言虽然很有用但是当引入新的参数时缺乏灵活性,需要额外的程序而导致成本增加。另一方面,很少有基于电子电路的语言来仿真SRM ,如Spice ,Simulink ,Matrix ,Vissim ,甚至Mathcad 。最初的仿真是靠Spice 语言实现的。然而,这种语言不太理想,因为Spice 只能用于电子电路仿真。后来,有人用MATLAB/Simulink ,这种语言允许在高灵敏度的模拟环境下选取电机参数。 第二节介绍了SRM 的主要特性,包括SRM 的优点和缺点,并且与直流电机进行了比较,还给出了电磁方程以及转矩产生的过程。 第三节,首先详细介绍了SRM 线性模型,并对6/4 SRM 进行了仿真。 第四节为附录,给出了关于SRM 线性模型的MATLAB 仿真程序。 II SRM 特性 在SRM 中,只有定子存在线圈,转子由硅钢叠片构成,没有线圈和永磁体。这种结构简单并且大大降低了成本。SRM 结构简单再加上近年来电力电子领域的发展使得SRM 与直流和交流电机相比主要有两个优点。 1)每相在物理和电磁方面都相互独立。 2)因为定子上没有线圈和永磁体,所以SRM 能获得较高转速一般可达到(20000-50000r/min )。 但是,SRM 也有一些局限性: 1)SRM 不能直接工作在直流或者交流环境下,必须经过整流。 2)其结构导致其磁化曲线非线性,使得分析和控制比较复杂。 3)转矩波动较大,而且噪声较大。 由于SRM 定转子之间气隙的磁阻是变化的,我们提出了一个方案。定子绕组通电后形成了单相磁场。由于转子有向最小磁阻位置转动的趋势,因而产生了电磁转矩。当定子极与转子对其时没有转矩,这时电感最大,磁阻最小(忽略磁路磁阻)。如果改变转子位置就会产生回到对其位置的转矩。 在对齐位置时给一相通电,不会产生转矩(或者很小)。如果改变转子所处的位置,将产生使定子指向下一个对齐位置的转矩。 A 电磁方程 根据法拉第定律,SRM 绕组端电压瞬时值与磁链有关,如下 dt d RI V ψ+= (1) 这里V 是定子绕组端电压,I 是相电流,R 是线圈电阻,Ψ是线圈的磁链。由于SRM 双突极式结构和磁路饱和的影响,SRM 磁链是关于转子位置角和相电流的函数。方程(1)可以扩展为