电流环工作原理
在工业现场,用一个仪表放大器来完成信号的调理并进行长线传输,会产生以下问题:
第一,由于传输的信号是电压信号,传输线会受到噪声的干扰;
第二,传输线的分布电阻会产生电压降;
第三,在现场如何提供仪表放大器的工作电压也是个问题。
为了解决上述问题和避开相关噪声的影响,我们用电流来传输信号,因为电流对噪声并不敏感。4~20mA的电流环便是用4mA表示零信号,用20mA表示信号的满刻度,而低于4mA高于20mA的信号用于各种故障的报警。
4~20mA电流环有两种类型:二线制和三线制。当监控系统需要通过长线驱动现场的驱动器件如阀门等时,一般采用三线制变送器,这里XTR位于监控的系统端,由系统直接向XTR供电,供电电源是二根电流传输线以外的第三根线。二线系统是XTR和传感器位于现场端,由于现场供电问题的存在,一般是接收端利用4~20mA的电流环向远端的XTR供电,通过4~20mA来反映信号的大小。
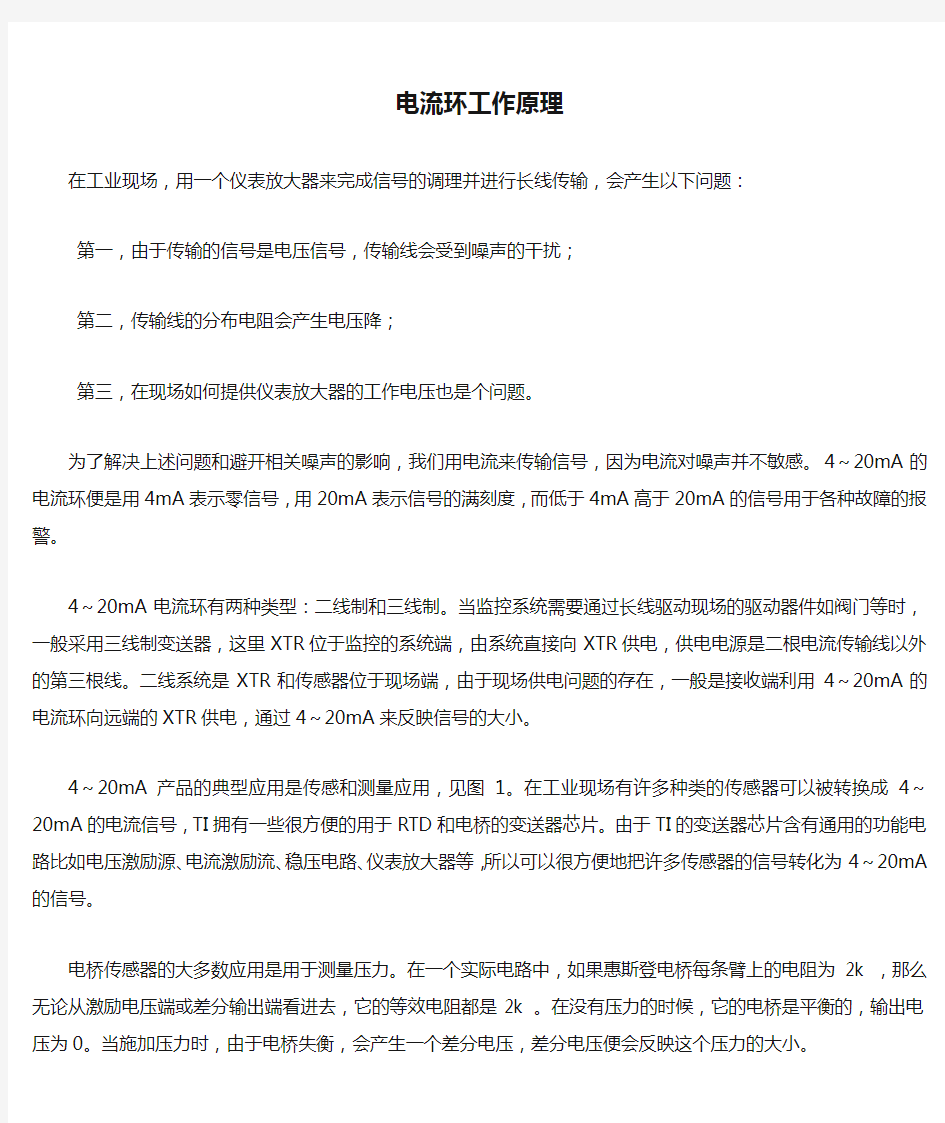
4~20mA产品的典型应用是传感和测量应用,见图1。在工业现场有许多种类的传感器可以被转换成4~20mA的电流信号,TI拥有一些很方便的用于RTD和电桥的变送器芯片。由于TI的变送器芯片含有通用的功能电路比如电压激励源、电流激励流、稳压电路、仪表放大器等,所以可以很方便地把许多传感器的信号转化为4~20mA的信号。
电桥传感器的大多数应用是用于测量压力。在一个实际电路中,如果惠斯登电桥每条臂上的电阻为2k ,那么无论从激励电压端或差分输出端看进去,它的等效电阻都是2k 。在没有压力的时候,它的电桥是平衡的,输出电压为0。当施加压力时,由于电桥失衡,会产生一个差分电压,差分电压便会反映这个压力的大小。
满度和色调是压力传感器的两个主要技术指标,现实世界里使用着的传感器都存在着一定的非线性,它的输出电压会随着温度的变化而变化。输出电压随温度的变化不是线性的,满度和色调都具有这种性质。
4~20mA的传感器信号调理解决方案
4~20mA电流环在结构上由两部分即变送器和接收器组成,变送器一般位于现场端、传感器端或模块端,而接收器一般在PLC和计算机端,它一般在控制器内。
二线制4~20mA电路应用,其工作电源和信号共用一根导线,工作电源由接收端提供。为了避免50/60Hz的工频干扰,采用电流来传输信号。二线制方案需要考虑的主要问题:确定所用接收器的数量,当有多个接收器时,它将要求变送器拥有一个较低的工作电源电压。另外一种考虑是降低回路电流在接收端的压降。
二线制方案设计需要考虑:
(1)电路环中的接收器的数量:更多的接收器将要求变送器有较低的工作电压;(2)变送器所必需的工作电压要有一定的余量;
(3)决定传感器的激励方法是电压还是电流。
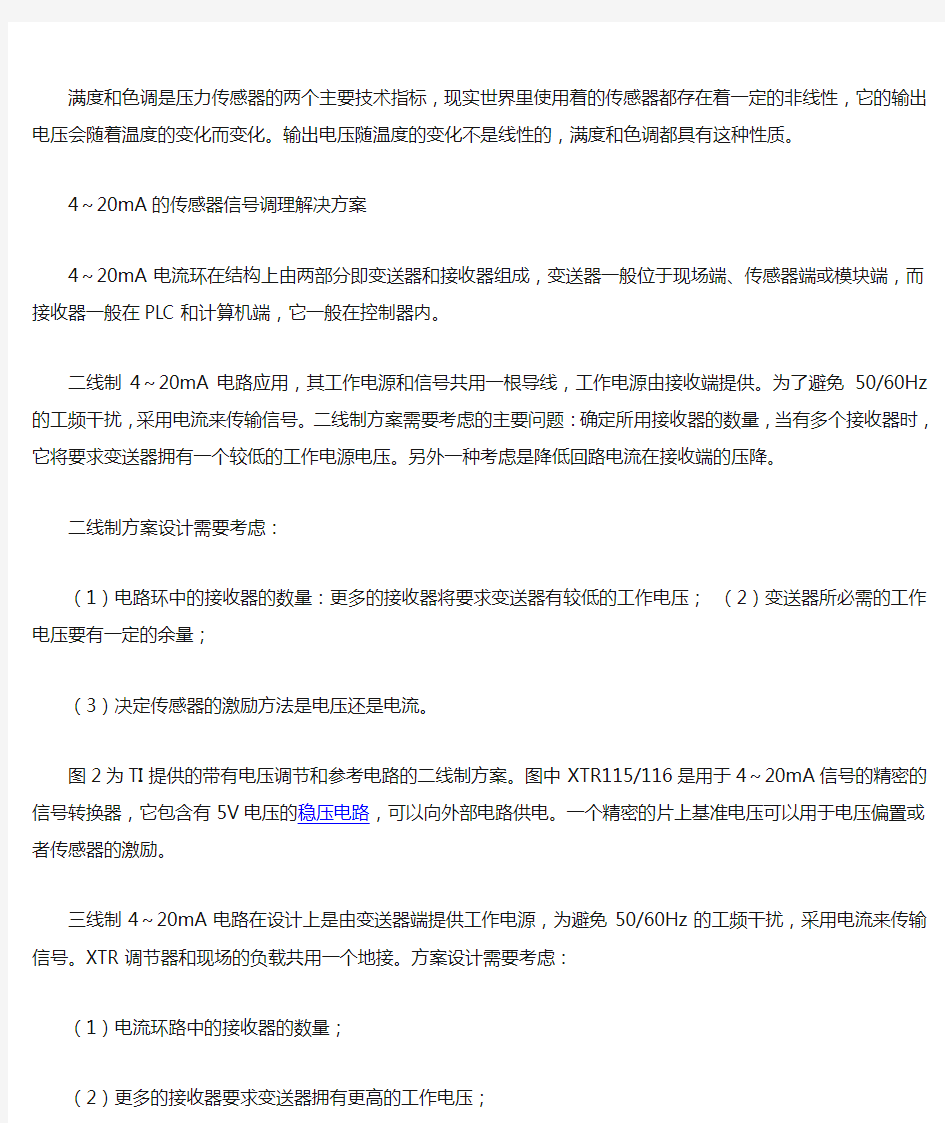
图2为TI提供的带有电压调节和参考电路的二线制方案。图中XTR115/116是用于4~20mA信号的精密的信号转换器,它包含有5V电压的稳压电路,可以向外部电路供电。一个精密的片上基准电压可以用于电压偏置或者传感器的激励。
三线制4~20mA电路在设计上是由变送器端提供工作电源,为避免50/60Hz的工频干扰,采用电流来传输信号。XTR 调节器和现场的负载共用一个地接。方案设计需要考虑:
(1)电流环路中的接收器的数量;
(2)更多的接收器要求变送器拥有更高的工作电压;
(3)保证变送器所必需的工作电压,并应该有一定的余量。
TI提供的三线制的变送器应用方案如图3所示,图中XTR110是一个用于模拟信号传送的精密的电压-电流转换器,它可以将0~5V或0~10V的输入电压直接转换到4~20mA、0~20mA、5~25mA的输出信号。XTR110含有精密的电阻网络,以适应不同的输入输出要求。一个10V的电压参考可以用于驱动外部电路。
编辑本段4~20mA的校正传统的4~20mA校正,要求特殊的夹具固定,需要特别的激光或手动电阻器调整,而调整是相互影响的,需要一个测试、调整,再测试、再调整的过程,调整次数和范围有限。电子器件和传感器调整起来不够方便。
现代的数字化4~20mA校正,它允许电子器件和传感器在封装之后进行调整;可通过计算机计算出校正系数来简化数值调整;可以有无限的调整次数,并且有很好的分辨率和较宽的调整范围;调整过程中不存在相互影响;电子器件和传感器可以很方便地调整。
XTR108是TI提供的校正4~20mA的解决方法。它具有480 A的电流参考,它提供RTD的非线性校正,不需要外加可调电阻器。XTR108的特点有:
(1)具有传感器的线性化电路;
(2)数字校正。通过SPI接口可以直接对XTR108设置,通过SPI接口可直接编程EEPROM;
(3)自动稳零的可编程增益的应用放大器的增益范围为6.26~400倍;
(4)RTD激励的可编程电流的分辨率为1.54 A;
(5)校正参数存储在外接的EEPROM中;
(6)可编程的过量程和欠量程的输出。
此外,TI还提供一款桥路传感器的数字校正解决方案——PGA309,它是专为压力桥路传感器设计的可编程模拟信号调节器。它模拟放大器传感信号并提供对色调电压和满度电压的数字校正,由于避免了手动调整而获得了长期的稳定性,并将输出电压信号转换成4~20mA的输出。
0~10V转换为4~20mA电路分析
信老师,您好!
我是机械电子专业的学生,正在做“电流转换电路”的设计,0~10V转换为4~20mA,我遇到了很大的问题,就是不会推导输入电压和输出电流的关系式,我附上了题目和相关的图,您能就以下两个思考题帮我分析一下么?然后给我回复。我在中华工控网也给您回帖了!
万分感谢,有机会来北京我请您吃饭,呵呵!
[附题]
简要说明:
为提高抗干扰能力,模拟信号经常采用4~20mA电流信号进行远距离传输。本电路的功能是将0~10V的输入电压信号ui转换成4~20mA的电流信号Io供长距离传输用。
思考题:
1.电路中电位器W1、W2和W3的作用各是什么?怎样相互配合调整才能使输出范围为4~20mA。
2.图中第2级放大器的增益应如何计算?(难点)
回答:
1,首先说明,按照你提供的参数是不能正常工作的!
2, N1在输入10V时会反相饱和导通。原因是你在抄袭电路时,将R2,W1的阻值搞错了。
3,第1级N1是反相衰减是放大器,应该将输入的0~10V电压信号变成负0~1.6V的信号。增益A=-(RF/Rf)Ui
RF=R2+W1=1.5KΩ+200Ω
Rf=R1=10KΩ
此时 A=-(1.6/10)Ui=0.16(0~10V)=0~1.6
4, 第2级N2是反相加法器,在接受前级输入的-0~1.6V同时与零点基准电压W2取来的-4V电压相加后,再与反馈电压VR11(0.4~2V)比较取得平衡,从而达到稳定输出电流的目的。
加法器电路是一个典型的反相加法放大器,输出电压Eo可以有以下公式表示:
Eo=-[Vi1(RF/Rf1)+Vi2(RF/Rf2)]
式中 Eo 输出电压
Vi1 前级来的信号电压(-0~1.6V)
Vi2 系统零点基准调节电压(-4V)
RF 加法器反馈电阻(10KΩ+600Ω)
Rf1 前级信号输入电阻(10KΩ)
Rf2 基准调节电压信号的输入电阻(100KΩ)
由于后一级电路要求,反相加法放大器是一个1:1的加法电路。所以
Eo=-[Vi1(RF/Rf1)+Vi2(RF/Rf2)]
=-[Vi1(10.6/10)+Vi2(10.6/100)]
=-[0~1.6(1~1.06)+4(0.1~0.106)]
=-[0~(1.6~1.696)+(0.4~0.424)]
=-0.4~(2~2.12)V
反馈电压VR11=(4~20mA)100Ω=0.4~2V
A,首先调整W2,使输入信号在0时,输出信号为4mA。最好精确测量W2的调节输出为4V。
B,再输入10V信号,调节W1使输出信号为20mA。
C,再将输入信号降为0,观察输出信号是否回到4mA。如果偏离4mA,可微调W3使输出为4mA。
D,重复B,C,直到输入0~10V,输出4~20mA即可。
所以,W1=量程满度电位器;W2=零点调节电位器;W3=校正电位器。
不知道这样回答能否使你满意?
-----------------------------------------------------
0~5V/4~20mA电压电流转换典型电路
希望对大家的学习有点儿促进作用!
实际应用时,可以在0~5V输入端并一只10K电阻,可以解决部分网友发生输出不可调整的问题.
零点调整电位器上端至电源间的100K电阻换成51K即可.
https://www.doczj.com/doc/b012030349.html,/dispbbs.asp?Boardid=9&ID=93033
---------------------------------------
4-20 mA电流环原理分析
订阅
一般传感器会把一个物理信号利用电桥等转化为与之对应的电信号,比如电压或电流。下面以一个恒流源电路来分析电压信号怎么产生与负载无关的电流信号,当然要产生4-20mA的电流信号,则把电压信号利用放大电路进行变换之后肯定是能做到的。如果传感器直接出来的是电流信号,则可以先变为电压信号,再经过信号调理电路肯定还能转换到4-20mA的电流信号。当然变换过程中的关系别人不需要知道。但是自己得知道,这样才能知道4mA的电流对应的物理量是多少,20mA的信号对应的物理量是多上少。
下图是郝兰德电路,是典型的电压电流转换电路。
其特点是负载电阻有一端接地(恒流源通常有这个要求),而取样电阻两端均不接地。之所以能够实现这个要求,关键就是上面一个运放和电阻的匹配。上面一个运放显然是跟随器,其输入阻抗很高,可以看成开路,其输出阻抗很低,可以看成电压源,而电位与Rs右端相同。这样就避免了R2中电流对输出的影响(R2不从输出端取用电流)。
由运放虚短概念可知,
V2=V1,V5=V4
V3=V2+(V2/R3)*R4 ―> V3=V2*(1+R4/R3)=V1*(1+R4/R3)
V1=R1*(V5-V)/(R1+R2) + V -> V5=V1*(1+R2/R1) –V*(R2/R1)
= V3 –V*(R2/R1) = V4
采样电阻RS两端的电压为:V4-V3= V*(R2/R1)
流过RS的电流为:(V*(R2/R1))/RS,其大小与负载电阻RL无关,受输入电压V控制。
因此一般在处理器端对数据进行采集时,一般是把电流信号转化为电压信号,再用ADC来处理。对于精度不高的场合可以就直接接一个250欧姆的精密电阻,转化为1-5V的信号。如果精度要求高的话可以先用运放来处理再用ADC采集。下面是几种恒流源电路。
所谓环的概念,它要出去两根线进行传输,到达处理器之后要接上负载电阻,以供AD采样。正好构成一个环状。
电流环通信原理
比较古老的通信方式,RS232通信的资料一大堆就不多说了。
20mA电流环路串行接口也是一种应用较广的接口电路,其串行通信接口电路如图所示,由于其没有形成正式标准,因此一般计算机的数据传送设备不具有这种接口。但其接口电路简单,发送正、发送负、接收正、接收负四根线分别组成了输入电流回路和输出电流回路。在发送数据时,根据数据的逻辑1和逻辑0来有规律的使回路形成通、断状态(图中用开关示意电流的有无)。电流环串行通信接口的最大优点是低阻抗传输线对电气噪声不敏感,而且易实现光电隔离,且传输距离很长。
分析一个大家接触得较多的电路。很多控制器接受来自各种检测仪表的0~20mA或4~20mA电流,电路将此电流转换成电压后再送ADC转换成数字信号,图九就是这样一个典型电路。如图4~20mA电流流过采样100Ω电阻R1,在R1上会产生0.4~2V的电压差。由虚断知,运放输入端没有电流流过,则流过R3和R5的电流相等,流过R2和R4的电流相等。故: (V2-Vy)/R3 = Vy/R5 ……a (V1-Vx)/R2 = (Vx-Vout)/R4 ……b由虚短知: Vx = Vy ……c电流从0~20mA变化,则V1 = V2 + (0.4~2) ……d由cd式代入b式得(V2 + (0.4~2)-Vy)/R2 = (Vy-Vout)/R4 ……e如果R3=R2,R4=R5,则由e-a得Vout = -(0.4~2)R4/R2 ……f图九中R4/R2=22k/10k=2.2,则f式Vout = -(0.88~4.4)V,即是说,将4~20mA 电流转换成了-0.88 ~ -4.4V电压,此电压可以送ADC去处理。
电流可以转换成电压,电压也可以转换成电流。图十就是这样一个电路。上图的负反馈没有通过电阻直接反馈,而是串联了三极管Q1的发射结,大家可不要以为是一个比较器就是了。只要是放大电路,虚短虚断的规律仍然是符合的!
由虚断知,运放输入端没有电流流过,
则 (Vi – V1)/R2 = (V1 – V4)/R6 ……a
同理 (V3 – V2)/R5 = V2/R4 ……b
由虚短知 V1 = V2 ……c
如果R2=R6,R4=R5,则由abc式得V3-V4=Vi
上式说明R7两端的电压和输入电压Vi相等,则通过R7的电流I=Vi/R7,如果负载RL<<100KΩ,则通过Rl 和通过R7的电流基本相同。
三极管Q1 2N2219的作用:扩展运放输出电流,因为op1不能输出20mA这么大的电流。该三极管可以与运放合并,看成一个放大器。
锁相环及其应用 所谓锁相环路,实际是指自动相位控制电路(APC),它是利用两个电信号的相位 误差,通过环路自身调整作用,实现频率准确跟踪的系统,称该系统为锁相环路,简称环路,通常 用PLL表示。 称VCO )三个部件组成闭合系统。这是一个基本环路,其各种形式均由它变化而来 PLL概念 设环路输入信号V i= V im Sin( 3 i t+ 0 i) 环路输出信号V o= V om Sin( 3 o t+ 0 o) 其中 3 o = 3 r +△ 3 o 率的自动控制系统称为锁相环路 PLL构成 由鉴相器(PD环路滤波器(LPF)压控振荡器(VCO组成的环路 通过相位反馈控制, 最终使相位保持同步, 实现了受控频率准确跟踪基准信号频锁相环路是由鉴相器(简称PD)、环路滤波器(简称LPF或LF )和压控振荡器(简
ejt 戶心(tAejt)谋差相檯 PLL 原理 从捕捉过程一锁定 A.捕捉过程(是失锁的) 0 i — 0 i 均是随时间变化的,经相位比较产生误差相位 0 e = 0 i - 0 o ,也是变化的。 b. 0 e (t)由鉴相器产生误差电压 V d (t)= f ( 0 e )完成相位误差一电压的变换作用。 V d (t)为交流电压。 C. V d (t)经环路滤波,滤除高频分量和干扰噪声得到纯净控制电压,由 VCO 产生 控制角频差△ 3 0,使3 0随3i 变化。 B.锁定(即相位稳定) 即 3 0= 3 r + △ 3 Omax 。 3 r 为VCO 固有振荡角频率。) 锁相基本组成和基本方程(时域) 各基本组成部件 鉴相器(PD) a. 一旦锁定0 e (t)= 0 e -(很小常数) V d (t)= V d (直流电压) b. 3 0= 3 i 输出频率恒等于输入频率(无角频差,同时控制角频差为最大△ 3 Omax
XTR115电流环电路原理及应用 在各种数据采集与监控中通常用一个仪表放大器来完成信号的调理,但是工业现场进行长线传输时,往往会产生以下问题:1)由于传输的信号是电压信号,传输线会受到噪声的干扰;2)传输线的分布电阻会产生电压降;3)现场无法提供仪表放大器的工作电压。为了解决上述问题并避开相关噪声的影响,通常用电流来传输信号,这是因为电流对噪声并不敏感。4~20 mA的电流环便是用4 mA表示零信号,用20 mA表示信号的满刻度,而将低于4 mA 和高于20 mA的信号用作各种故障的报警。电流环电路,根据转换原理的不同可划分成以下两种类型:一种是电压/电流转换器,亦称电流环发生器,它能将输入电压转换成4~20 mA的电流信号(典型产品有1B21,1B22,AD693,AD694,XTR115和XTR116);另一种属于电流/电压转换器,也叫电流环接收器(典型产品为RCV420),上述产品可满足不同用户的需要。电流环电路,根据器件位置的不同又可划分成以下两种类型:两线制和三线制。当监控系统需要通过长线驱动现场的驱动器件(如阀门等)时,一般采用三线制变送器,这里,电流环器件位于监控的系统端,由系统直接向电流环器件供电,供电电源是二根电流传输线以外的第三根线。两线系统是电流环器件和传感器位于现场端,由于现场供电问题的存在,一般是接收端利用4~20 mA的电流环向远端的电流环器件供电,通过4~20 mA来反映信号的大小。 XTR系列是美国BB(BURR-BROWN)公司生产的精密电流变送器,该公司现已并入美国Texas Instruments公司。该系列产品包括XTR101,XTR10 5,XTR106,XTR110,XTR115和XTR116共6种型号。其特点是能完成电压/电流(或电流/电流)转换,适配各种传感器构成测试系统、工业过程控制系统、电子秤重仪等。其中,XTR115和XTR116能够满足工业测量标准的两线4~20 mA电流环电路,该电路设计巧妙、使用方便、超低静态电流,非常适合于变送器等典型工业测量应用之中。本文针对两线的XTR115电流环电路的工作原理和典型应用展开详细讨论,可为4~20 mA电流环电路的使用提供有益参考。1 XTR115的性能特点 XTR115具有如下性能特点: 1)XTR115属于二线制电流变送器,内部的2.5 V基准电压可作为传感器的激励源。XTR115可将传感器产生的40~200μA弱电流信号放大100倍,获得4~20 mA的标准输出。当环路电流接近32 mA时能自动限流。如果在3脚与5脚之间并联一只电阻,就可以改变限流值。 2)芯片中增加了+5 V精密稳压器,其输出电压精度为±0.05%,电压温度系数仅为20x10-6/℃,可给外部电路(例如前置放大器)单独供电,从而简化了外部电源的设计。 3)精度高,非线性误差小。转换精度可达±0.05%,非线性误差仅为±0.003%。 4)环路电源电压的允许范围宽为7.5~36 V。XTR115由环路电源供电。工作温度范围是-40~+85℃。 5)专门设计了功率管接口,适配外部NPN型功率晶体管,它与内部输出晶体管并联后可降低芯片的功耗。2 XTR115的工作原理 XTR115和XTR116用SO-8小型化封装,其结构组成及原理图,XTR115和XTR116内部电路主要由3部分组成。 第一部分是电流环电路的核心部分,它是由内部的运算放器A1、电阻RIN、R1、R2、Rlim 和外接晶体三极管T1组成。第二部分是电源调整电路,它提供传感器部分的外围电路工作电源和参考电压。第三部分是由电阻Ra、Rb、Rlim和晶体三极管TO组成保护电路,以防止输出电流过大或上电过程中的过冲脉冲损坏芯片。为了叙述方便,摘出电流环电路部分。 图2电路中,信号电压施加在VIN和VG之间,VG相当于传感器部分的参考点。根据运算放大器的基本原理,运算放大器的两个输入端电压基本相等,流入运算放大器输入端的电流基本为零。可知:此时的I0只是信号变化部分的电流,它的变化范围是0~16 mA,对应到I3是0~160μA,可以根据这一电流和输入信号的电压幅度决定输入电阻RIN;要
半导体薄片置于磁感应强度为 B 的磁场中,磁场方向垂直于薄片,如图所示。当有电流 I 流过薄片时,在垂直于电流和磁场的方向上将产生电动势 EH ,这种现象称为霍尔效应,该电动势称为霍尔电势,上述半导体薄片称为霍尔元件。 原理简述如下:激励电流 I 从 a 、 b 端流入,磁场 B 由正上方作用于薄片,这时电子 e 的运动方向与电流方向相反,将受到洛仑兹力 FL 的作用,向内侧偏移,该侧形成电子的堆积,从而在薄片的 c 、 d 方向产生电场 E 。电子积累得越多, FE 也越大,在半导体薄片 c 、 d 方向的端面之间建立的电动势 EH 就是霍尔电势。 由图可以看出,流入激励电流端的电流 I 越大、作用在薄片上的磁场强度B 越强,霍尔电势也就越高。磁场方向相反,霍尔电势的方向也随之改变,因此霍尔传感器能用于测量静态磁场或交变磁场。 半导体薄片置于磁感应强度为 B 的磁场中,磁场方向垂直于薄片,如图所示。当有电流 I 流过薄片时,在垂直于电流和磁场的方向上将产生电动势 EH ,这种现象称为霍尔效应,该电动势称为霍尔电势,上述半导体薄片称为霍尔元件。 原理简述如下:激励电流 I 从 a 、 b 端流入,磁场 B 由正上方作用于薄片,这时电子 e 的运动方向与电流方向相反,将受到洛仑兹力 FL 的作用,向内侧偏移,该侧形成电子的堆积,从而在薄片的 c 、 d 方向产生电场 E 。电子积累得越多, FE 也越大,在半导体薄片 c 、 d 方向的端面之间建立的电动势 EH 就是霍尔电势。 由图可以看出,流入激励电流端的电流 I 越大、作用在薄片上的磁场强度B 越强,霍尔电势也就越高。磁场方向相反,霍尔电势的方向也随之改变,因此霍尔传感器能用于测量静态磁场或交变磁场。
1.锁相环的基本原理和模型 在并网逆变器系统中,控制器的信号需要与电网电压的信号同步,锁相环通过检测电网电压相位与输出信号相位之差,并形成反馈控制系统来消除误差,达到跟踪电网电压相位和频率的目的。一个基本的锁相环结构如图1-1所示,主要包括鉴相器,环路滤波器,压控振荡器三个部分。 图1-1 基本锁相环结构 鉴相器的主要功能是实现锁相环输出与输入的相位差检测;环路滤波器的主要作用应该是建立输入与输出的动态响应特性,滤波作用是其次;压控振荡器所产生的所需要频率和相位信息。 PLL 的每个部分都是非线性的,但是这样不便于分析设计。因此可以用近似的线性特性来表示PLL 的控制模型。 鉴相器传递函数为:)(Xo Xi Kd Vd -= 压控振荡器可以等效为一个积分环节,因此其传递函数为:S Ko 由于可以采用各种类型不同的滤波器(下文将会讲述),这里仅用)(s F 来表示滤波器的传递函数。 综合以上各个传递函数,我们可以得到,PLL 的开环传递函数,闭环传递函数和误差传递函数分别如下: S s F K K s G d o op )()(=,)()()(s F K K S s F K K s G d o d o cl +=,) ()(s F K K S S s H d o += 上述基本的传递函数就是PLL 设计和分析的基础。 2.鉴相器的实现方法 鉴相器的目的是要尽可能的得到准确的相位误差信息。可以使用线电压的过零检测实现,但是由于在电压畸变的情况下,相位信息可能受到严重影响,因此需要进行额外的信号处理,同时要检测出相位信息,至少需要一个周波的时间,动态响应性能可能受到影响。 一般也可以使用乘法鉴相器。通过将压控振荡器的输出与输入相乘,并经过一定的处理得到相位误差信息。 在实际的并网逆变器应用中还可以在在同步旋转坐标系下进行设计,其基本的目的也是要得的相差的数值。同步旋转坐标系下的控制框图和上图类似,在实际使用中,由于pq 理论在电网电压不平衡或者发生畸变使得性能较差,因而较多的使用dq 变换,将采样得到的三相交流电压信号进行变化后与给定的直流参考电压进行比较。上述两种方法都使用了近似,利用在小角度时正弦函数值约等于其角度,因而会带来误差,这个误差是人为近似导致的误差,与我们要得到的相位误差不是一个概念,最终的我们得到相位误差是要形成压控振荡器的输入信号,在次激励下获得我们所需要的频率和相位信息。 2.1乘法鉴相器
电流环控制原理分析 电流环是使电机以恒定的电流运转,以产生恒定的加速力矩。这对于转动惯量大的电机来说比较重要,它可以使电机一直以固定的电流驱动电机运转,驱动电流不会因为转速的升高下降。 ?要进行电流控制,首先必须时刻监控电机工作电流,因此电流传感器是伺服系统中的一个重要元件,它的精度和动态性能直接影响着系统的低速性能和快速性。电流检测的方法有电阻检测、光耦检测等各种不同的检测方法,本系统采用磁平衡原理实现的霍尔元件检测电流的方法,检测电源母线电路电流。采用的元器件为霍尔效应磁场补偿式电流传感器,此器件被国际上推荐为电力电子线路中的关键电流检测器件。它把磁放大器、互感器、霍尔元件和电子线路的思想集成一体,具有测量、反馈、保护的三重功能。实际是有源电流互感器,它最巧妙的构思是“磁场补偿”。被测量的原边磁场同测量绕组里的测量磁动势,时时补偿为零。即铁心里面实际没有磁通,因而其体积可以做得很小,而不用担心铁心饱和,也不用担心频率、谐波的影响。它的磁动势能补偿原理是利用霍尔效应的作用,当二者磁动势能不平衡时,霍尔元件上会产生磁动势,此磁动势作为以±15Y外加电源供电的差分放大器的输入信号,放大器的输出电流即为传感器的测量电流,自动迅速地恢复磁动势平衡,即霍尔输出总保持为零。这样,测量电流的波形忠实地反映了原边被测电流的波形,其大小只是一个匝比的关系。 ?具体说来,霍尔效应磁场补偿式电流传感器具有以下优点: ?它克服了传统的电流取样元件受规定频率、规定波形的限制及不适应功率变频发展,波形常不标准的缺点。它响应频率的带宽为0~100kHz,对任何波形,特别是含有直流分量的信号都可以迅速响应,符合电力电子技术,包
4~20mA电流环工作原理 2008-04-07 22:40 在工业现场,用一个仪表放大器来完成信号的调理并进行长线传输,会产生以下问题:第一,由于传输的信号是电压信号,传输线会受到噪声的干扰;第二,传输线的分布电阻会产生电压降;第三,在现场如何提供仪表放大器的工作电压也是个问题。 为了解决上述问题和避开相关噪声的影响,我们用电流来传输信号,因为电流对噪声并不敏感。4~20mA的电流环便是用4mA表示零信号,用20mA表示信号的满刻度,而低于4mA高于20mA的信号用于各种故障的报警。 4~20mA电流环有两种类型:二线制和三线制。当监控系统需要通过长线驱动现场的驱动器件如阀门等时,一般采用三线制变送器,这里XTR位于监控的系统端,由系统直接向XTR供电,供电电源是二根电流传输线以外的第三根线。二线系统是XTR和传感器位于现场端,由于现场供电问题的存在,一般是接收端利用4~20mA的电流环向远端的XTR供电,通过4~20mA来反映信号的大小。 4~20mA产品的典型应用是传感和测量应用,见图1。在工业现场有许多种类的传感器可以被转换成4~20mA的电流信号,TI拥有一些很方便的用于RTD和电桥的变送器芯片。由于TI的变送器芯片含有通用的功能电路比如电压激励源、电流激励流、稳压电路、仪表放大器等,所以可以很方便地把许多传感器的信号转化为4~20mA的信号。 图1 (略) 电桥传感器的大多数应用是用于测量压力。在一个实际电路中,如果惠斯登电桥每条臂上的电阻为2k ,那么无论从激励电压端或差分输出端看进去,它的等效电阻都是2k 。在没有压力的时候,它的电桥是平衡的,输出电压为0。当施加压力时,由于电桥失衡,会产生一个差分电压,差分电压便会反映这个压力的大小。 满度和色调是压力传感器的两个主要技术指标,现实世界里使用着的传感器都存在着一定的非线性,它的输出电压会随着温度的变化而变化。输出电压随温度的变化不是线性的,满度和色调都具有这种性质。 4~20mA的传感器信号调理解决方案 4~20mA电流环在结构上由两部分即变送器和接收器组成,变送器一般位于现场端、传感器端或模块端,而接收器一般在PLC和计算机端,它一般在控制器内。 二线制4~20mA电路应用,其工作电源和信号共用一根导线,工作电源由接收端
霍尔电流传感器工作原理 1、直放式(开环)电流传感器(CS系列) 当原边电流I P流过一根长导线时,在导线周围将产生一磁场,这一磁场的大小与流过导线的电流成正比,产生的磁场聚集在磁环内,通过磁环气隙中霍尔元件进行测量并放大输出,其输出电压V S精确的反映原边电流I P。一般的额定输出标定为4V。 2、磁平衡式(闭环)电流传感器(CSM系列) 磁平衡式电流传感器也称补偿式传感器,即原边电流Ip在聚磁环处所产生的磁场通过一个次级线圈电流所产生的磁场进行补偿,其补偿电流Is精确的反映原边电流Ip,从而使霍尔器件处于检测零磁通的工作状态。 具体工作过程为:当主回路有一电流通过时,在导线上产生的磁场被磁环聚集并感应到霍尔器件上,所产生的信号输出用于驱动功率管并使其导通,从而获得一个补偿电流Is。这一电流再通过多匝绕组产生磁场,该磁场与被测电流产生的磁场正好相反,因而补偿了原来的磁场,使霍尔器件的输出逐渐减小。当与Ip与匝数相乘所产生的磁场相等时,Is不再增加,这时的霍尔器件起到指示零磁通的作用,此时可以通过Is来测试Ip。当Ip变化时,平衡受到破坏,霍尔器件有信号输出,即重复上述过程重新达到平衡。被测电流的任何变化都会破坏这一平衡。一旦磁场失去平衡,霍尔器件就有信号输出。经功率放大后,立即就有相应的电流流过次级绕组以对失衡的磁场进行补偿。从磁场失衡到再次平衡,所需的时间理论上不到1μs,这是一个动态平衡的过程。因此,从宏观上看,次级的补偿电流安匝数在任何时间都与初级被测电流的安匝数相等。 3、霍尔电压(闭环)传感器(VSM系列)
霍尔电压传感器的工作原理与闭环式电流传感器相似,也是以磁平衡方式工作的。原边电压VP通过限流电阻Ri产生电流,流过原边线圈产生磁场,聚集在磁环内,通过磁环气隙中霍尔元件输出信号控制的补偿电流IS流过副边线圈产生的磁场进行补偿,其补偿电流IS精确的反映原边电压VP。 4、交流电流传感器(A-CS系列) 交流电流传感器主要测量交流信号灯电流。是将霍尔感应出的交流信号经过AC-DC及其他转换,变为0~4V、0~20mA(或4~20mA)的标准直流信号输出供各种系统使用。
运动伺服一般都是三环控制系统,从内到外依次是电流环、速度环、位置环。 1、电流环:电流环的输入是速度环PID调节后的那个输出,电流环的输入值和 电流环的反馈值进行比较后的差值在电流环内做PID调节输出给电机,“电流环的输出”就是电机的每相的相电流,“电流环的反馈”不是编码器的反馈而是在驱动器内部安装在每相的霍尔元件(磁场感应变为电流电压信号)反馈给电流环的。电流环就是控制电机转矩的,所以在转矩模式下驱动器的运算最小,动态响应最快。任何模式都必须使用电流环,电流环是控制的根本,在系统进行速度和位置控制的同时系统也在进行电流/转矩的控制以达到对速度和位置的相应控制。 2、速度环:速度环的输入就是位置环PID调节后的输出以及位置设定的前馈值, 速度环输入值和速度环反馈值进行比较后的差值在速度环做PID调节(主要是比例增益和积分处理)后输出到电流环。速度环的反馈来自于编码器的反馈后的值经过“速度运算器”得到的。速度环控制包含了速度环和电流环。 3、位置环:位置环的输入就是外部的脉冲,外部的脉冲经过平滑滤波处理和电 子齿轮计算后作为“位置环的设定”,位置环输入值和来自编码器反馈的脉冲信号经过偏差计数器的计算后的数值在经过位置环的PID调节(比例增益调节,无积分微分调节)后输出和位置给定的前馈值的和构成速度环的给定。 位置环的反馈也来自于编码器。位置控制模式下系统进行了3个环的运算,系统运算量大,动态响应速度最慢。 编码器安装于伺服电机尾部,它和电流环没有任何联系,他采样来自于电机的转动而不是电机电流,和电流环的输入、输出、反馈没有任何联系。而电流环是在驱动器内部形成的,即使没有电机,只要在每相上安装模拟负载(例如电灯泡)电流环就能形成反馈工作。 三种控制模式 位置控制:通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的数量来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置。应用领域如数控机床、印刷机械等等。 速度模式:通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环PID控制时速度模式也可以进行定位,但必须把电机的位置信号或直接负载的位置信号给上位反馈以做运算用。位置模式也支持直接负载外环检测位置信号,此时的电机轴端的编码器只检测电机转速,位置信号就由直接的最终负载端的检测装置来提供了,这样的优点在于可以减少中间传动过程中
基本组成和锁相环电路 1、频率合成器电路 频率合成器组成: 频率合成器电路为本机收发电路的频率源,产生接收第一本机信号源和发射电路的发射信号源,发射信号源主要由锁相环和VCO电路直接产生。如图3-4所示。 在现在的移动通信终端中,用于射频前端上下变频的本振源(LO),在射频电路中起着非常重要的作用。本振源通常是由锁相环电路(Phase-Locked Loop)来实现。 2.锁相环: 它广泛应用于广播通信、频率合成、自动控制及时钟同步等技术领域 3.锁相环基本原理: 锁相环包含三个主要的部分:⑴鉴相器(或相位比较器,记为PD或PC):是完成相位比较的单元,用来比较输入信号和基准信号的之间的相位.它的输出电压正比于两个输入信号之相位差.⑵低通滤波器(LPF):是个线性电路,其作用是滤除鉴相器输出电压中的高频分量,起平滑滤波的作用.通常由电阻、电容或电感等组成,有时也包含运算放大器。⑶压控振荡器(VCO):振
荡频率受控制电压控制的振荡器,而振荡频率与控制电压之间成线性关系。在PLL中,压控振荡器实际上是把控制电压转换为相位。 1、压控振荡器的输出经过采集并分频; 2、和基准信号同时输入鉴相器; 3、鉴相器通过比较上述两个信号的频率差,然后输出一个直流脉冲电压; 4、控制VCO,使它的频率改变; 5、这样经过一个很短的时间,VCO 的输出就会稳定于某一期望值。 锁相环电路是一种相位负反馈系统。一个完整的锁相环电路是由晶振、鉴相器、R分频器、N分频器、压控振荡器(VCO)、低通滤波器(LFP)构成,并留有数据控制接口。 锁相环电路的工作原理是:在控制接口对R分频器和N分频器完成参数配置后。晶振产生的参考频率(Fref)经R分频后输入到鉴相器,同时VCO的输出频率(Fout)也经N分频后输入到鉴相器,鉴相器对这两个信号进行相位比较,将比较的相位差以电压或电流的方式输出,并通过LFP滤波,加到VCO的调制端,从而控制VCO的输出频率,使鉴相器两输入端的输入频率相等。 锁相环电路的计算公式见公式: Fout=(N/R)Fref 由公式可见,只要合理设置数值N和R,就可以通过锁相环电路产生所需要的高频信号。 4.锁相环芯片 锁相环的基准频率为13MHz,通过内部固定数字频率分频器生成5KHz或6.25KHz的参考频率。VCO振荡频率通过IC1 内部的可编程分频器分频后,与基准频率进行相位比较,产生误差控制信号,去控制VCO,改变VCO的振荡频率,从而使VCO输出的频率满足要求。如图3-5所示。 N=F VCO/F R N:分频次数 F VCO:VCO振荡频率
霍尔电流传感器的种类及工作原理 1.简介 霍尔电流传感器可以分为很多种,如果按照原理可以分为开环霍尔电流传感器(Open Loop Hall Effect)和闭环霍尔电流传感器(Close Loop Hall Effect)。基于开环原理的电流传感器结构简单,可靠性好,过载能力强,体积较小,但也有很多缺点,如温度影响大,精度低,反应时间不够快,频带宽度窄等。而闭环霍尔电流传感器等特点是精度高,响应快,频带宽,但同时也有缺点,即过载能力差,体积较大,工艺比较复杂,同时价格也偏高。 1原理图如下: 开环原理霍尔电流传感器示意图 闭环原理霍尔电流传感器示意图 2 霍尔电流传感器的工作原理 霍尔电流传感器可以测量各种类型的电流,从直流电到几十千赫兹的交流电,其所依据的工作原理主要是霍尔效应原理。 1图片来自PAS 网站
2.1 电流传感 器的输出信号 2当原边导线经过电 流传感器时,原边电流IP 会产生磁力线,原边磁力 线集中在磁芯气隙周围, 内置在磁芯气隙中的霍尔 电片可产生和原边磁力线 成正比的,大小仅为几毫伏的感应电压,通过后续电子电路可把这个微小的信号转变成副边电流IS,并存在以下关系式:IS*NS= IP*NP。其中,IS—副边电流;IP—原边电流;NP—原边线圈匝数;NS —副边圈匝数;NP / NS—匝数比,一般取NP=1。 电流传感器的输出信号是副边电流IS,它与输入信号(原边电流IP)成正比,IS 一般小,只有10~400mA。如果输出电流经过测量电阻RM,则可以得到一个与原边电流成正比的大小为几伏的电压输出信号。 2.2 电流传感器供电电压V A V A指电流传感器的供电电压,它必须在传感器所规定的范围内。超过此范围,传感器不能正常工作或可靠性降低。另外,传感器的供电电压V A又分为正极供电电压V A+和负极 供电电压V A-。要注意单相供电的传感器,其供电电压V Amin是双相供电电压V Amin 的2倍,所以其测量范围要高于双相供电的传感器。 2.3 测量范围Ipmax 测量范围指电流传感器可测量的最大电流值,测量范围 一般高于标准额定值I 。 2.4霍尔电流传感器工作原理 霍尔电流传感器可以测量各种类型的电流,从直流电到几十千赫兹的交流电,其所依据的工作原理主要是霍尔效应原理。它有两种工作方式,即磁平衡式和直式。霍尔电流传感器一般由原边电路、聚磁环、霍尔器件、(次级线圈)和放大电路等组成。 直放式电流传感器(开环式):当电流通过一根长导线时,在导线周围将产生一磁场,这一磁场的大小与流过导线的电流成正比,它可以通过磁芯聚集感应到霍尔器件上并使其有一信号输出。这一信号经信号放大器放大后直接输出,一般的额定输出标定为4V。 磁平衡式电流传感器(闭环式):磁平衡式电流传感器也称补偿式传感器,即主回路被测电流Ip在聚磁环处所产生的磁场通过一个次级线圈,电流所产生的磁场进行补偿,从而使霍尔器件处于检测零磁通的工作状态。当原边导线经过电流传感器时,原边电流IP会产生磁力线,原边磁力线集中在磁芯气隙周围,内置在磁芯气隙中的霍尔电片可产生和原边磁力线成正比的,大小仅为几毫伏的感应电压,通过后续电子电路可把这个微小的信号转变成副边电流IS,并存在以下关系式: IS* NS= IP*NP。(其中,IS—副边电流;IP—原边电流;NP—原边线圈匝数;NS—副边线圈匝数;NP/NS—匝数比,一般取NP=1。)磁平衡式电流传感器的具体工作过程为:当主回路有一电流通过时,在导线上产生的磁场被聚磁环聚集并感应到霍尔器件上,所产生的信号输出用于驱动相应的功率管并使其导通,从而获得一个补偿电流Is。这一电流再通过多匝绕组产生磁场,该磁场与被测电流产生的磁场正好相反,因而补偿了原来的磁场,使霍尔器件的输出逐渐减小。当与Ip 2董高峰《浅析霍尔电流传感器的应用》
4-20ma 电流环工作原理 在工业现场,用一个仪表放大器来完成信号的调理并进行长线传输,会产生以下问题:第一,由于传输的信号是电压信号,传输线会受到噪声的干扰;第二,传输线的分布电阻会产生电压降;第三,在现场如何提供仪表放大器的工作电压也是个问题。 为了解决上述问题和避开相关噪声的影响,我们用电流来传输信号,因为电流对噪声并不敏感。4~20mA的电流环便是用4mA表示零信号,用20mA表示信号的满刻度,而低于4mA 高于20mA的信号用于各种故障的报警。 4~20mA电流环有两种类型:二线制和三线制。当监控系统需要通过长线驱动现场的驱动器件如阀门等时,一般采用三线制变送器,这里XTR位于监控的系统端,由系统直接向XTR供电,供电电源是二根电流传输线以外的第三根线。二 器位于现场端,由于现场供电问题的存在,一般是接收端利用4~20mA的电流环向远端的XTR供电,通过4~20mA来反映信号的大小。 4~20mA产品的典型应用是传感和测量应用,见图1。在工业现场有许多种类的传感器可以被转换成4~20mA的电流信号,TI拥有一些很方便的用于RTD和电桥的变送器芯片。由于TI的变送器芯片含有通用的功能电路比如电压激励源、电流激励流、稳压电路、仪表放大器等,所以可以很方便地把许多传感器的信号转化为4~20mA的信号。 图1 (略) 电桥传感器的大多数应用是用于测量压力。在一个实际电路中,如果惠斯登电桥每条臂上的电阻为2k ,那么无论从激励电压端或差分输出端看进去,它的等效电阻都是2k 。在没有压力的时候,它的电桥是平衡的,输出电压为0。当施加压力时,由于电桥失衡,会产生一个差分电压,差分电压便会反映这个压力的大小。 满度和色调是压力传感器的两个主要技术指标,现实世界里使用着的传感器都存在着一定的非线性,它的输出电压会随着温度的变化而变化。输出电压随温度的变化不是线性的,满度和色调都具有这种性质。 4~20mA的传感器信号调理解决方案 4~20mA电流环在结构上由两部分即变送器和接收器组成,变送器一般位于现场端、传感器端或模块端,而接收器一般在PLC和计算机端,它一般在控制器内。 二线制4~20mA电路应用,其工作电源和信号共用一根导线,工作电源由接收端提供。为了避免50/60Hz的工频干扰,采用电流来传输信号。二线制方案需要考虑的主要问题:确
第三节电流表的工作原理 ●教学目标 一、知识目标 1.知道电流表的构造. 2.知道电流表的内部磁场的分布特点. 3.能准确判定线圈各边所受磁场力的方向. 4.会推导线圈所受安培力的力矩,理解电流表的刻度为什么是均匀的. 二、能力目标 1.培养学生的阅读能力、概括能力. 2.培养学生的分析推理能力. 三、德育目标 培养学生形成积极思维,善于推理的思维品质. ●教学重点 1.电流表的构造及表内的磁场分布特点. 2.通电线圈所受安培力矩的计算. ●教学难点 1.表内的磁场分布特点. 2.电流表的刻度为什么是均匀的. ●教学方法 阅读法、讲授法、分析推理法 ●教学用具 演示电流表、投影仪、投影片、实物投影仪 ●课时安排 1课时 ●教学过程 用投影片出示本节课的学习目标: 1.知道电流表的构造. 2.知道电流表内部磁场的分布特点. 3.能用左手定则准确判定线圈各边所受磁场力的方向. 4.会推导线圈所受安培力的力矩,理解电流表的刻度为什么是均匀的. ●学习目标完成过程 一、复习提问,引入新课 [提问]什么是安培力? [学生答]磁场对电流的作用力叫安培力. [提问]安培力的大小如何计算? [学生答]在匀强磁场中,在通电直导线和磁场方向垂直的情况下,电流所受的安培力F等于磁场感应强度B,电流I和导线长度L三者的乘积,即F=BIL. [提问]安培力的方向如何判断? [学生答]通电直导线所受安培力的方向和磁场方向、电流方向之间的关系,可以用左手定则来判定:伸开右手,使大拇指跟其余四个手指垂直,并且都跟手掌在一个平面内,把手放入磁场中,让磁感线垂直穿入手心,并使伸开的四指指向电流的方向,那么大拇指所指的方向就是通电导线在磁场中所受安培力的方向. [教师讲述]在日常生产生活以及科学实验中,处处都用到一种测量电流强弱和方向的仪表——电流表.这节课我们就一起研究电流表的工作原理.
电流传感器的工作原理-标准化文件发布号:(9556-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
电流传感器工作原理 电流传感器是传感器的一种分类,其主要信号源是采集信号的电流大小!主要参数为其电流大小!检测方法一般是检测电流特性的器件,一般有电流表之类的! 工作原理主要是霍尔效应原理. 一、以零磁通闭环产品原理为例: 1、当原边导线经过电流传感器时,原边电流IP会产生磁力线,原边磁力线集中在磁芯气隙周围,内置在磁芯气隙中的霍尔电片可产生和原边磁力线成正比的,大小仅为几毫伏的感应电压,通过后续电子电路可把这个微小的信号转变成副边电流IS,并存在以下关系式: IS* NS= IP*NP 其中,IS—副边电流; IP—原边电流; NP—原边线圈匝数; NS—副边线圈匝数; NP/NS—匝数比,一般取NP=1。 电流传感器的输出信号是副边电流IS,它与输入信号(原边电流IP)成正比, IS一般很小,只有10~400mA。如果输出电流经过测量电阻RM,则可以得到一个与原边电流成正比的大小为几伏的电压输出信号。 2、传感器供电电压VA VA指电流传感器的供电电压,它必须在传感器所规定的范围内。超过此范围,传感器不能正常工作或可靠性降低,另外,传感器的供电电压VA又分为正极供电电压VA+和负极供电电压VA-。要注意单相供电的传感器,其供电电压VAmin是双相供电电压VAmin的2倍,所以其测量范围要相供高于双电的传感器。 3、测量范围Ipmax 测量范围指电流传感器可测量的最大电流值,测量范围一般高于标准额定值IPN。 二、电流传感器主要特性参数 1、标准额定值IPN和额定输出电流ISN
锁相环基本原理 一个典型的锁相环(PLL )系统,是由鉴相器(PD ),压控荡器(VCO )和低通滤波器(LPF )三个基本电路组成,如图1, Ud = Kd (θi –θo) U F = Ud F (s ) θi θo 图1 一.鉴相器(PD ) 构成鉴相器的电路形式很多,这里仅介绍实验中用到的两种鉴相器。 异或门的逻辑真值表示于表1,图2是逻辑符号图。 表1图2 从表1可知,如果输入端A 和B 分别送 2π 入占空比为50%的信号波形,则当两者 存在相位差?θ时,输出端F 的波形的 占空比与?θ有关,见图3。将F 输出波 形通过积分器平滑,则积分器输出波形 的平均值,它同样与?θ有关,这样,我 们就可以利用异或门来进行相位到电压 ?θ 的转换,构成相位检出电路。于是经积 图3 分器积分后的平均值(直流分量)为: U U=Vdd*?θ/π (1) Vcc 不同的?θ,有不同的直流分量Vd 。 ?θ与V 的关系可用图4来描述。 从图中可知,两者呈简单线形关 1/2Vcc 系: Ud = Kd *?θ (2) 1/2ππ?θ Kd 为鉴相灵敏度图4 F O o U K dt d =θV PD LPF VCO Ui Uo V A B F __F = A B + A B F B A
2. 边沿触发鉴相器 前已述及,异或门相位比较器在使用时要求两个作比较的信号必须是占空比为50%的波形,这就给应用带来了一些不便。而边沿触发鉴相器是通过比较两输入信号的上跳边沿(或下跳边沿)来对信号进行鉴相,对输入信号的占空比不作要求。 二. 压控振荡器(VCO ) 压控振荡器是振荡频率ω0受控制电压U F (t )控制的振荡器,即是一种电压——频率变换器。VCO 的特性可以用瞬时频率ω0(t )与控制电压U F (t )之间的关系曲线来表示。未加控制电压时(但不能认为就是控制直流电压为0,因控制端电压应是直流电压和控制电压的叠加),VCO 的振荡频率,称为自由振荡频率ωom ,或中心频率,在VCO 线性控制范围内,其瞬时角频率可表示为: ωo (t )= ωom + K 0U F (t ) 式中,K 0——VCO 控制特性曲线的斜率,常称为VCO 的控制灵敏度,或称压控灵敏度。 三. 环路滤波器 这里仅讨论无源比例积分滤波器如图5。 其传递函数为: 1 )(1 )()()(212+++== τττs s s U s U s K i O F 式中:τ1 =R1C τ2 = R2 C 图5 四. 锁相环的相位模型及传输函数 图6 图6为锁相环的相位模型。要注意一点,锁相环是一个相位反馈系统,在环路中流通的是相位,而不是电压。因此研究锁相环的相位模型就可得环路的完整性能。 由图6可知: R1 0640 V Kd KF(s)Ko/s i o e A -+
图2:加入锁相环后的图形 图1:未加入锁相环时的图形 锁相环最基本的结构如图6.1所示。它由三个基本的部件组成:鉴相器(PD)、环路滤波器(LPF 振荡器(VCO)。 鉴相器是个相位比较装置。它把输入 信号S (t)和压控振荡器的输出信号 i Array (t)的相位进行比较,产生对应于两 S o 个信号相位差的误差电压S (t)。 e 环路滤波器的作用是滤除误差电压 (t)中的高频成分和噪声,以保证环 S e 路所要求的性能,增加系统的稳定性。
压控振荡器受控制电压S d (t)的 控制,使压控振荡器的频率向输入信 号的频率靠拢,直至消除频差而锁定。 锁相环是个相位误差控制系统。它比较输入信号和压控振荡器输出信号之间的相位差,从而产生电压来调整压控振荡器的频率,以达到与输入信号同频。在环路开始工作时,如果输入信号频率荡器频率不同,则由于两信号之间存在固有的频率差,它们之间的相位差势必一直在变化,结果出的误差电压就在一定范围内变化。在这种误差电压的控制下,压控振荡器的频率也在变化。若器的频率能够变化到与输入信号频率相等,在满足稳定性条件下就在这个频率上稳定下来。达到输入信号和压控振荡器输出信号之间的频差为零,相差不再随时间变化,误差电压为一固定值,就进入“锁定”状态。这就是锁相环工作的大致过程。 以上的分析是对频率和相位不变的输入信号而言的。如果输入信号的频率和相位在不断地变可能通过环路的作用,使压控的频率和相位不断地跟踪输入频率的变化。 锁相环具有良好的跟踪性能。若输入FM 信号时,让环路通带足够宽,使信号的调制频谱落在带这时压控振荡器的频率跟踪输入调制的变化。 对于锁相环的详细分析可参阅有关锁相技术的书籍。在此仅说明锁相环鉴频原理。可以简单控振荡器频率与输入信号频率之间的跟踪误差可以忽略。因此任何瞬时,压控振荡器的频率ωv (波的瞬时频率ωFM (t)相等。 FM 波的瞬时角频率可表示为 假设VCO 具有线性控制特性,其斜率K v (压控灵敏度)为(弧度/秒·伏),而VCO 在S d (t)=0频率为ωo ’,则当有控制电压时,VCO 的瞬时角频率为 令上两式相等,即ωv (t)≈ωFM (t),可得
永磁同步电动机的数学模型和矢量控制 1.坐标变换原理 (1)坐标系介绍 三种:三相静止坐标系(abc)、两相静止坐标系(αβ)以及同步旋转坐标系(dq)(2)坐标变换 主要目的是为了将交流电机的物理模型等效地变成直流电机的物理模型,使控制大大简化。不同电机模型等效的原则是:在不同坐标系下产生的磁动势相同。 三相静止坐标系与两相静止坐标系之间转换 为方便起见,取α轴与A轴重合,设三相系统每相绕组的有效匝数为N3,两相系统每相绕组的有效匝数为N2,各相磁动势均为有效匝数及其瞬时电流的乘积。交流电流的磁动势大小随时间耳边,图中磁动势矢量的长短是任意画的。设磁动势波形是正弦分布,当三相磁动势与两相磁动势相等时,两套绕组瞬时磁动势在α、β上的投影应当相等。 为了便于求反变换,最好将变换阵表示成可逆的方阵。为此,在两相系统上人为地增加一相零轴磁动势N2i0,并定义为 将以上三式合在一起,写成矩阵形式,得
式中 是三相坐标系变换到两相坐标系的变换阵。满足功率不变条件时应有 显然,两矩阵的乘积应该为单位阵, 由此求得 这就是满足功率不变约束条件时的参数关系。由此得到
在实际电机中并没有零轴电流,因此实际的电流变换式为 如果三相绕组是星形不带零线接法则 整理得 两相静止/两相旋转变换
由三相静止坐标系到任意两相旋转坐标系上的变换 2.永磁同步电动机的数学模型 当永磁同步电动机的定子通入三相交流电I&时,电枢电流在定子绕组电枢电阻R S上产生电压降IR&。由三相交流电流I&产生的旋转电枢磁动势Fa,及建立的电枢磁场aφ&,一方面切割定子绕组并在定子绕组中产生感应反电动势a E&,另一方面以电磁力拖动转子以同步转速n s旋转。电枢电流I&还会产生仅与定子绕组相交链的定子绕组漏磁通。并在定子绕组中产生感应漏电动势Eσ&。此外转子永磁
锁相环的组成和工作原理 1.锁相环的基本组成 许多电子设备要正常工作,通常需要外部的输入信号与内部的振荡信号同步,利用锁相环路就可以实现这个目的。 锁相环路是一种反馈控制电路,简称锁相环(PLL)。锁相环的特点是:利用外部输入的参考信号控制环路内部振荡信号的频率和相位。 因锁相环可以实现输出信号频率对输入信号频率的自动跟踪,所以锁相环通常用于闭环跟踪电路。锁相环在工作的过程中,当输出信号的频率与输入信号的频率相等时,输出电压与输入电压保持固定的相位差值,即输出电压与输入电压的相位被锁住,这就是锁相环名称的由来。锁相环通常由鉴相器(PD)、环路滤波器(LF)和压控振荡器(VCO)三部分组成,锁相环组成的原理框图如图8-4-1所示。 锁相环中的鉴相器又称为相位比较器,它的作用是检测输入信号和输出信号的相位差,并将检测出的相位差信号转换成u D(t)电压信号输出,该信号经低通滤波器滤波后形成压控振荡器的控制电压u C(t),对振荡器输出信号的频率实施控制。 2.锁相环的工作原理 锁相环中的鉴相器通常由模拟乘法器组成,利用模拟乘法器组成的鉴相器电路如图8-4-2所示。 鉴相器的工作原理是:设外界输入的信号电压和压控振荡器输出的信号电压分别为: (8-4-1) (8-4-2) 式中的ω0为压控振荡器在输入控制电压为零或为直流电压时的振荡角频率,称为电路的固有振荡角频率。则模拟乘法器的输出电压u D为:
用低通滤波器LF将上式中的和频分量滤掉,剩下的差频分量作为压控振荡器的输入控制电压u C(t)。即u C(t)为: (8-4-3) 式中的ωi为输入信号的瞬时振荡角频率,θi(t)和θO(t)分别为输入信号和输出信号的瞬时位相,根据相量的关系可得瞬时频率和瞬时位相的关系为: 即(8-4-4) 则,瞬时相位差θd为 对两边求微分,可得频差的关系式为 (8-4-6) 上式等于零,说明锁相环进入相位锁定的状态,此时输出和输入信号的频率和相位保持恒定不变的状态,u c(t)为恒定值。当上式不等于零时,说明锁相环的相位还未锁定,输入信号和输出信号的频率不等,u c(t)随时间而变。 因压控振荡器的压控特性如图8-4-3所示,该特性说明压控振荡器的振荡频率ωu以ω0为中心,随输入信号电压u c(t)的变化而变化。该特性的表达式为 上式说明当u c(t)随时间而变时,压控振荡器的振荡频率ωu也随时间而变,锁相环进入“频率牵引”,自动跟踪捕捉输入信号的频率,使锁相环进入锁定的状态,并保持ω0=ωi的状态不变。 8.4.2锁相环的应用 1.锁相环在调制和解调中的应用 (1)调制和解调的概念
我们讨论的两线制、三线制、四线制,是指各种输出为模拟直流电流信号的变送器,其工作原理和结构上的区别,而并非只指变送器的接线形式。否则热电偶配毫伏计测量温度可称为是两线制的鼻祖了! 几线制的称谓,是在两线制变送器诞生后才有的。这是电子放大器在仪表中广泛应用的结果,放大的本质就是一种能量转换过程,这就离不开供电。因此最先出现的是四线制的变送器;即两根线负责电源的供应,另外两根线负责输出被转换放大的信号(如电压、电流、等)。但目前,很多变送器采用二线制。 因为要实现两线制变送器必须同时满足以下条件: 1.V≤Emin-ImaxRLmax 变送器的输出端电压V等于规定的最低电源电压减去电流在负载电阻和传输导线电阻上的压降。 2. I≤Imin 变送器的正常工作电流I必须小于或等于变送器的输出电流。 3. P<Imin(Emin-IminRLmax) 变送器的最小消耗功率P不能超过上式,通常<90mW。 式中:Emin=最低电源电压,对多数仪表而言Emin=24(1-5%)=22.8V,5%为24V电源允许的负向变化量; Imax=20mA; Imin=4mA; RLmax=250Ω+传输导线电阻。 如果变送器在设计上满足了上述的三个条件,就可实现两线制传输。所谓两线制即电源、负载串联在一起,有一公共点,而现场变送器与控制室仪表之间的信号联络及供电仅用两根电线,这两根电线既是电源线又是信号线。两线制变送器由于信号起点电流为4mA.DC,为变送器提供了静态工作电流,同时仪表电气零点为 4mA.DC,不与机械零点重合,这种“活零点”有利于识别断电和断线等故障。而且两线制还便于使用安全栅,利于安全防爆。 两线制变送器如图一所示,其供电为24V.DC,输出信号为4-20mA.DC,负载电阻为250Ω,24V电源的负线电位最低,它就是信号公共线,对于智能变送器还可在4-20mA.DC信号上加载HART协议的FSK键控信号。