1.正确安装 ROBOGUIDE_6.406912 rev F ,先安装安装盘里的SimPRO,选择需要的虚拟机器人的软件版本。安装完 SimPRO后再安装WeldPro。安装完,会要求注册;若未注册,有30天的时间限制。
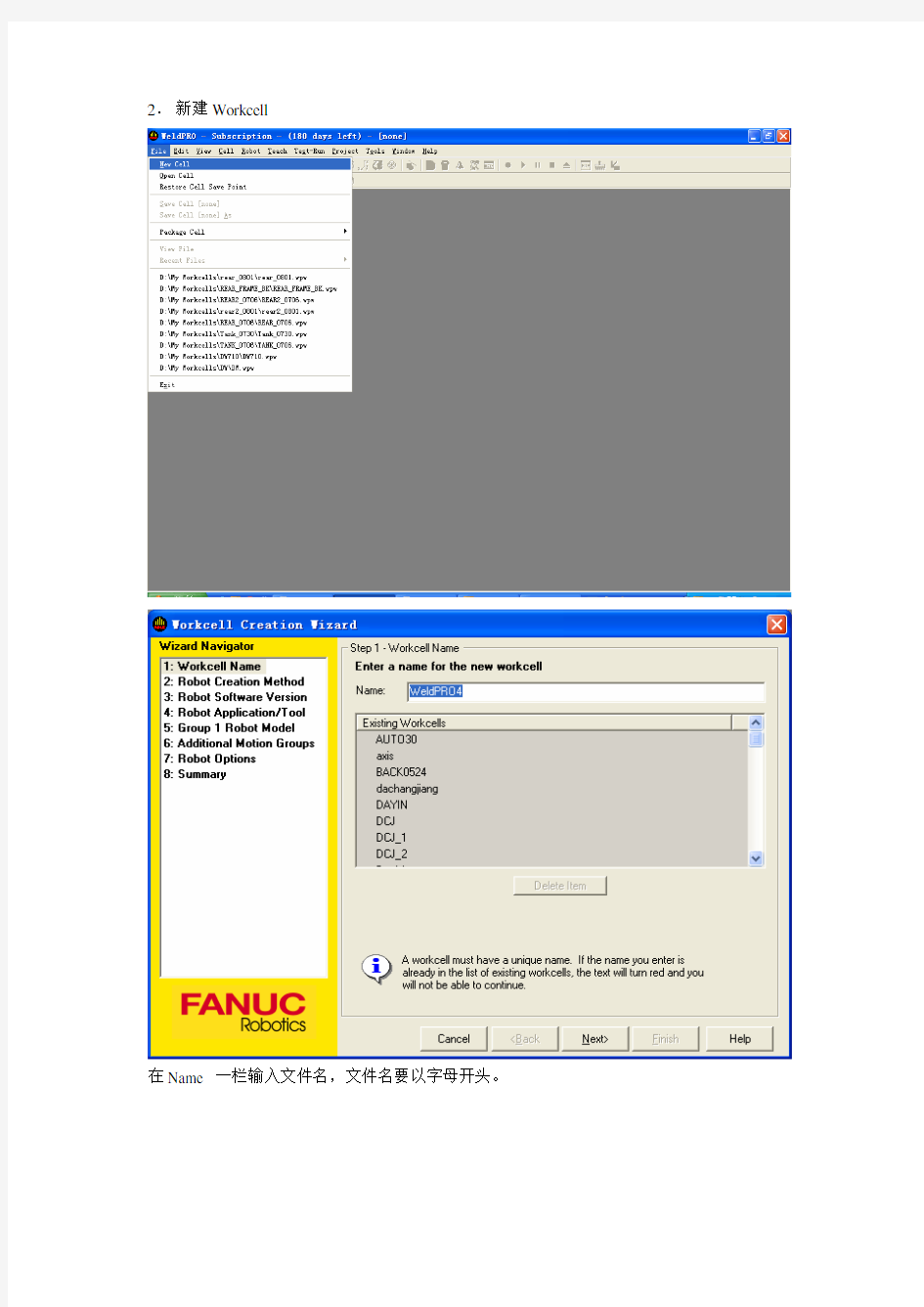
2.新建Workcell
在Name 一栏输入文件名,文件名要以字母开头。
第一项是根据默认的配置新建;第二项是根据上次使用的配置新建;第三项是根据机器人备份文件来创建;第四项是根据已有机器人的拷贝来新建;一般都选用第一项。
选择机器人的软件版本:V6.** 是针对R-J3iB 控制器,V7.**是应用在R-J3iC控制器的。现在销售的机器人都是R-J3iC控制器的。
选择机器人的应用软件:一般选用ArcTool ( H541 )
选择合适的机型,如果选型错误,造成焊接位置达不到,可以在创建之后更改。
然后选择Group2 ~7的设备:该实例中选了两个Positioners ,如果没有类似设备,就无需在此页上做任何选择。
根据所需,选择相应的选项功能软件。以下列出一些弧焊中常用的选项功能:
1A05B-2500-H871 ARC Positioner FANUC二轴变位机
1A05B-2500-J511 TAST Arc Sensor
1A05B-2500-J518 Extended Axis Control 行走轴
1A05B-2500-J526 AVC 弧压控制
1A05B-2500-J536 Touch Sensing 接触传感
1A05B-2500-J605 Multi Robot Control 多机器人控制,Dual Arm中用1A05B-2500-J601 Multi-Group Motion 多组控制,有变位机,必须选1A05B-2500-J617 Multi Equipment 多设备,Tamdem Mig中用
1A05B-2500-J613 Continuous Turn 连续转,
1A05B-2500-J678 ArcTool Ramping 焊接参数谐波变化
1A05B-2500-J686 Coord Motion Package 变位机协调功能
3.添加附加轴软件设置
如果有附加轴(Positioner,Rail),则需要完成这一步。如果没有,请跳过此步。
3.1输入FSSB 光缆的编号,总轴数少于12的情况下,一般是1
3.2附加轴开始的轴数:一般是7,8,9
依次下去
3.3选运动类型:一般都是选2,未知的类型。
3.4选第二项:
Add Axis
3.5选第一项:Standard Method 标准的方法
3.6 选择相应的伺服马达
3.7 选马达转速;
3.8 选伺服电机的最大电流,如果以上三项选错,则无法继续下步操作,会要求重新选。
3.9 选伺服放大器编号:2,3,4依次下去
3.10 选伺服放大器类型。
3.11 选轴的运动类型:直线还是旋转
3.12 运动方向
3.13 减速比
3.14 最大速度设定,一般选2,默认值
3.15 一般选默认值
1
3.16 运动范围上限
3.17 运动范围下限
3.18 零度标定时的位置
3.19 加速时间
1
3.20 加速时间2
3.22 最小加速时间
3.23 负载率
3.24 马达抱匝号设置
3.25 伺服自动关闭是否有限
4.其他附加轴也用类似的方法添加。
5.添加焊枪,TCP设置。
如图所示,右键点击UT:1 (Eoat1)
然后点击“Eoat1 Properties”
6. 以气动转台+伺服变位机为例,如何添加模型。
选择已做好的IGS 格式的模型文件。
在下面菜单里,CAD Location 这一栏填写位置数据。
在摆放好气动转台的底座后,现在来添加“转台支架”。
暂时把转台底座隐藏起来。见下图。
下面是选择转台的运动类型
现在,在转台支架上添加变位机。
FANUC机器人仿真软件操作手册
2008年10月第1版ROBOGUIDE 使用手册(弧焊部分基础篇)
目录 目录 (1) 第一章概述 (2) 1.1. 软件安装 (2) 1.2. 软件注册 (3) 1.3. 新建Workcell的步骤 (4) 1.3.1. 新建 (4) 1.3.2. 添加附加轴的设置 (11) 1.4. 添加焊枪,TCP设置。 (16) 1.5. Workcell的存储目录 (20) 1.6.鼠标操作 (22) 第二章创建变位机 (25) 3.1.利用自建数模创建 (25) 3.1.1.快速简易方法 (25) 3.1.2.导入外部模型方法 (42) 3.2.利用模型库创建 (54) 3.2.1.导入默认配置的模型库变位机 (54) 3.2.2.手动装配模型库变位机 (58) 第三章创建机器人行走轴 (66) 3.1. 行走轴-利用模型库 (66) 3.2. 行走轴-自建数模 (75) 第四章变位机协调功能 (82) 4.1. 单轴变位机协调功能设置 (82) 4.2. 单轴变位机协调功能示例 (96) 第五章添加其他外围设备 (98) 第六章仿真录像的制作 (102)
第一章概述 1.1. 软件安装 本教程中所用软件版本号为V6.407269 正确安装ROBOGUIDE ,先安装安装盘里的SimPRO,选择需要的虚拟机器人的软件版本。安装完SimPRO后再安装WeldPro。安装完,会要求注册;若未注册,有30天时间试用。
如果需要用到变位机协调功能,还需要安装MultiRobot Arc Package。 1.2. 软件注册 注册方法:打开WeldPRO程序,点击Help / Register WeldPRO 弹出如下窗口,
注意事项: 1.在系统安装之前,请仔细阅读本教程的详细步骤! 2.安装系统会清空磁盘的所有数据,请先备份好有用的个人数据!! 3.请确保机器的电量在60%以上,防止因为电量低导致系统安装失败!!!准备工作: 1.准备带供电的USB HUB和OTG线 2.键盘、鼠标(可选)和8GB或更大容量的U盘一个 操作步骤: 一、制作带启动功能的U盘 1.运行UltraISO软件(见目录下的: UltraISO_v9.5. 2.2836.exe)。 (如果电脑是WIN8.1或WIN10请以管理员身份运行) 2.加载PE镜像(见目录下的: winpe_x86_win10.iso) (此为32位PE,用来安装32位的WIN10系统)
3. U 盘插到电脑的USB 接口上,然后依次点击UltraISO 软件上方工具栏的启动—>写 入硬盘映像
在弹出的菜单上注意如下三个选项:
点击写入按钮,即可对U盘创建启动分区。完成以后退出软件,进到电脑的磁盘管理下,可以看到U盘有一个启动分区,然后另一个磁盘可以格式化成NTFS格式,存放大于4GB的单文件了。 二、安装或更新Win10系统 1.在电脑上解压缩下载的压缩包 温馨提示:如果是分卷压缩的,如下图所示,一个压缩包分两部分压缩,必须要全部下载下来,然后解压缩其中一个即可. 2.把前一步制作好的,带启动功能的U盘连接到电脑上,格式化成NTFS格式,在格式化 时要把U盘的磁盘名称改为WINPE(这个很重要,不然在安装系统时,有可能会出现认不到U盘的情况),然后打开前面解压的文件夹,把里面的所有文件复制到U盘上。复制完成以后,打开U盘显示的目录如下: 3.把带供电的USB HUB插上电源,然后插上键盘,鼠标,U盘和OTG线,OTG线另一端连 到平板上。 4.按平板的电源键开机,然后连续短按键盘的Esc键,进入BIOS界面。如下图所示:
目录 第一章概述 ------------------------------------------------------------------------------------------------------- 3 1、ROBOGUIDE简介 ---------------------------------------------------------------------------------- 3 2、软件安装 --------------------------------------------------------------------------------------------- 3 3、新建Work cell ------------------------------------------------------------------------------------ 10 第二章界面介绍和基本操作 ------------------------------------------------------------------------------ 17 1、界面介绍 ------------------------------------------------------------------------------------------- 17 2、常用工具条功能介绍 --------------------------------------------------------------------------- 18 第三章添加设备 ---------------------------------------------------------------------------------------------- 24 1、周边设备的添加---------------------------------------------------------------------------------- 24 2、机器人相关设备的添加------------------------------------------------------------------------ 30 第四章仿真调试及视频录制 ------------------------------------------------------------------------------ 35 1、Roboguide中的示教盒(TP) --------------------------------------------------------------- 35 2、Roboguide中示教机器人---------------------------------------------------------------------- 37 3、Roboguide仿真软件中特有的模拟程序(Simulation Program)----------------- 38 4、仿真视频的录制---------------------------------------------------------------------------------- 40
ROBOGUIDE仿真说明手册V1.0 1.ROBOGUIDE简介 图1 ROBOGUIDE是发那科机器人公司提供的一个离线编程工具,它是围绕一个离线的三维世界进行模拟,在这个三维世界中模拟现实中的机器人和周边设备的布局,通过其中的TP示教,进一步来模拟它的运动轨迹。通过这样的模拟可以验证方案的可行性同时获得准确的周期时间。ROBOGUIDE是一款核心应用软件,具体的还包括搬运、弧焊、喷涂等其他模块。ROBOGUIDE的仿真环境界面是传统的WINDOWS界面,由菜单栏,工具栏,状态栏等组成。 2.简单工作环境的建立
1.打开BOGUIDE后单击工具栏上的新建按钮,建立一个新的工作环境,出现如图2所示界面。 图2 2.在图2这个界面下选择你所需要进行的仿真,这里包括搬运,弧焊等(根据安装软件的不同这里的可选项目不同,具体安装可以浏览安装光盘里的记事本说明文件),确定后单击Next进入下一个选择步骤,如图 3. 图3 3.在图3这个界面下你需要确定仿真的命名,即在Name中输入仿真的名字,也可以用默认的命名。命名完成后单击Next进入下一个选择步骤,如图4。 图4 4.在图4这个界面下是选择一个创建机器人的方式,我们选择第一个创建一个新的机器人,然后单击Next进入下一个选择界面,如图5。 图5
5.在图5这个界面下选择一个安装在机器人上的软件版本(版本越高功能越多),然后单击Next进入下一个选择界面,如图6。 图6 6.在图6这个界面下选择仿真所需要的工具,如点焊工具,弧焊工具,搬运工具,根据仿真的需要选择合适的工具,然后单击Next进入下一个选择界 面,如图7。 图7
注意事项: 1、在系统安装之前,请仔细阅读本教程的详细步骤; 2、此安装教程适用于双系统BIOS没有损坏的情况下,对系统进行更新; 3、安装系统会清空磁盘的所有数据,请预先把重要数据进行备份; 4、安装过程大约需时30-40分钟,安装前务必保证机器电量充足,建议预先给机器充满电,再进行操作; 5、以下刷机分为Android刷机和Windows刷机,可根据刷机需求分别单独进行,即需要更新Android固 件时,进行Android刷机操作即可,需要更新Windows系统时,进行Windows刷机操作即可; 准备工作: 1、在台电官网,输入机器背壳ID,下载对应的系统包和刷机工具并完成解压; 2、准备两个8G容量以上的U盘; 3、准备一台带外接供电的USB HUB设备; 4、准备一套USB键盘; 备注:若单刷Android固件,则不用准备2、3、4点所说明的工具; 操作步骤: 一、刷Android固件 1、打开“Android系统升级工具”文件夹,按以下顺序安装: 1) 首先安装iSocUSB-Driver-Setup-1.2.0.exe文件; 2) 再安装IntelAndroidDrvSetup1.5.0.exe文件; 3) 最后安装ManufacturingFlashTool_Setup_6.0.51.exe文件; 4) 以上安装成功后,将“升级工具”文件夹中的CUSTOM_CONFIG.INI文件拷贝到C:\Program Files\Intel\Manufacturing Flash T ool目录下。
特别注意事项:a、必须按以上顺序安装升级工具b、安装以上程序时请保持默认安装设置和路径c、以上三个程序按顺序安装成功后,在电脑桌面上会有升级工具快捷图标,如图1所示d、请务必按以上步骤操作,否则将导致升级不成功 图1 2、安装完成后,运行“Manufacturing Flash Tool”后再点击左上角的File选择Settings选项,将SOC Devicds的VID/PID分别改为8087和0A65,将Android devices的VID/PID分别改为8087和OFFF,如下图红色方框所示进行设置,保存后关闭量产工具。 3、重新打开量产工具,选择File---Open,选择“双系统-Android固件”文件夹中的烧录文件 “flash_nopartition.xml”。(注意,此处如果选择了“flash.xml”,会将Windows系统擦除,变成单Android系统,如果要保留Windows系统,请不要选择“flash.xml”)
酷比魔方I7-WN (I7手写版)WIN10系统安装教程 注意:此安装文件仅适用于酷比魔方I7手写版序列号以I7WN开头的型号,其他I7手写板型号的机器也可以安装此系统,但是系统无法激活。 一:需要的工具及准备工作: 1.酷比魔方i7-WN WIN10系统安装文件.rar压缩包(需要用户自行登录酷比魔方官网下载) 2.键盘一个,USB-HUB集线器一个,U盘一个(容量必须8G或者8G以上) 3.机器电量保持在30%以上。 二升级步骤: 1.解压“酷比魔方i7-WN WIN10系统安装文件.rar”,得到: Bios,WIN10文件夹以及“酷比魔方I7-WN (I7手写版)WIN10系统安装教程.DOC” 2.将U盘格式化成NTFS,卷标命名成“WINPE”(U盘容量大小建议8G或者8G以上) 将WIN10文件夹目录下的所有文件拷贝到刚刚格式化的“WINPE”U盘根目录下。
注意:系统文件大概占用U盘6.3G容量。
3.将I7的USB-OTG口通过OTG线连上USB-HUB集线器,并在USB-HUB集线器的扩展口上插上USB键盘以及刚刚复制好系统安装文件的”WINPE”U盘 4.先按I7的电源键开机,然后按键盘上的F7键使I7启动进入磁盘启动界面: 5.通过键盘上的上下键选择复制好复制好系统安装文件的”WINPE”U盘,按ENTER回车键确认。 6.上述1-5个步骤操作正常,机器会自动进入PE系统进行系统安装:
在最后这个界面输入“exit”或者长按电源键重启机器即可进入I7 WIN10系统,整个安装过程到这里完成。 注意:如果上述安装过程后重启进入win10系统,进入的win10界面是如下界面: “重新启动”),平板将会自动进行清理部署,并重启进行正常的启动设置。
2008年10月第1版ROBOGUIDE 使用手册(弧焊部分基础篇)
目录 目录 (1) 第一章概述 (2) 1.1. 软件安装 (2) 1.2. 软件注册 (3) 1.3. 新建Workcell的步骤 (3) 1.3.1. 新建 (4) 1.3.2. 添加附加轴的设置 (9) 1.4. 添加焊枪,TCP设置。 (15) 1.5. Workcell的存储目录 (18) 1.6.鼠标操作 (19) 第二章创建变位机 (21) 3.1.利用自建数模创建 (21) 3.1.1.快速简易方法 (21) 3.1.2.导入外部模型方法 (31) 3.2.利用模型库创建 (42) 3.2.1.导入默认配置的模型库变位机 (42) 3.2.2.手动装配模型库变位机 (45) 第三章创建机器人行走轴 (50) 3.1. 行走轴-利用模型库 (50) 3.2. 行走轴-自建数模 (57) 第四章变位机协调功能 (63) 4.1. 单轴变位机协调功能设置 (63) 4.2. 单轴变位机协调功能示例 (72) 第五章添加其他外围设备 (73) 第六章仿真录像的制作 (76)
第一章概述 1.1. 软件安装 本教程中所用软件版本号为V6.407269 正确安装ROBOGUIDE ,先安装安装盘里的SimPRO,选择需要的虚拟机器人的软件版本。安装完SimPRO后再安装WeldPro。安装完,会要求注册;若未注册,有30天时间试用。 如果需要用到变位机协调功能,还需要安装MultiRobot Arc Package。
1.2. 软件注册 注册方法:打开WeldPRO程序,点击Help / Register WeldPRO 弹出如下窗口, 1.3. 新建Workcell的步骤
利用roboguide离线编程结合力传感器的打磨技术 在打磨行业中,利用机器人打磨技术,需要精准的打磨线路以及合适的打磨力度,FANCU机器人本体有着很高的重复精度,再加上其离线编程软件robogude以及自身研制的力传感器,可以很好的找到打磨路径,并自动生成机器人程序,加上力传感器控制打磨方向的力度,可以打磨出符合客户要求的产品。 现就苏州A VY打磨得apple产品,概述一下整个打磨得调试过程。 1.选择合适的打磨路径。 下图所示为A VY打磨得appleK18产品的图1: 图1 实际工件图 由于该产品需要对整个面进行全抛光,分析得出,分为两个方面抛光,一个是大平面,一个是四周带有弧度的圆角。对于大平面,因为是平面,可以手动调试。对于有弧度的边,利用3D软件(PROE,UG等),将要打磨得地方用一个平面整体切出来,这样会在边上面留下一条线痕,将其导成IGS文件。 2.根据路径,离线编写程序 在roboguide中生成使用的机器人,将上面生成的工件IGS文件用part的形式导入roboguide中,命名为workpiece,如图所示:
在roboguide中生成一个FIXTURE,命名为table,将该table置于机器人运动范围之内,在该table中的part中加入导入的workpiece,如图3,图4所示: 图3 添加table 图4 添加workpiece 在roboguide中,生成一个Tool坐标系,用这个Tool坐标系来做User坐标系,这个User坐标系是后续我们需要在实际机器人中所用的User坐标系,为了是将roboguide中所生成的程序坐标与实际生产中的程序坐标对应起来,为此,我们将这个User坐标系原点放在工件的表面正中心,在这里必须注意了,这里使用的User坐标系的序号必须与实际中用的序号是一致的。 首先,在roboguide中生成一个LINK,将Tool坐标系点定义到这个LINK的最前端,如图5所示,然后打开roboguide中的示教器,依次按键操作:MENU(菜单)--SETUP(设定)—F1TYPE(类型)--Frames(坐标系)进入坐标系设置界面,进入USER Frame(用户坐标系),用三点法做用户坐标系,首先找工件的中心点作为坐标系原点(这个中心点可以用3D 软件做一个标记),然后定义出X方向与Y方向(在这里,采用默认的世界坐标系中的X
简介 图1 ROBOGUIDE是发那科机器人公司提供的一个离线编程工具,它是围绕一个离线的三维世界进行模拟,在这个三维世界中模拟现实中的机器人和周边设备的布局,通过其中的TP示教,进一步来模拟它的运动轨迹。通过这样的模拟可以验证方案的可行性同时获得准确的周期时间。ROBOGUIDE是一款核心应用软件,具体的还包括搬运、弧焊、喷涂等其他模块。ROBOGUIDE的仿真环境界面是传统的WINDOWS界面,由菜单栏,工具栏,状态栏等组成。 2.简单工作环境的建立 1.打开BOGUIDE后单击工具栏上的新建按钮,建立一个新的工作环境,出现如图2所示界面。 图2 2.在图2这个界面下选择你所需要进行的仿真,这里包括搬运,弧焊等(根据安装软件的不同这里的可选项目不同,具体安装可以浏览安装光盘里的记事本说明文件),确定后单击Next进入下一个选择步骤,如图 3.
图3 3.在图3这个界面下你需要确定仿真的命名,即在Name中输入仿真的名字,也可以用默认的命名。命名完成后单击Next进入下一个选择步骤,如图4。 图4 4.在图4这个界面下是选择一个创建机器人的方式,我们选择第一个创建一个新的机器人,然后单击Next进入下一个选择界面,如图5。 图5 5.在图5这个界面下选择一个安装在机器人上的软件版本(版本越高功能越多),然后单击Next进入下一个选择界面,如图6。 图6 6.在图6这个界面下选择仿真所需要的工具,如点焊工具,弧焊工具,搬运工具,根据仿真的需要选择合适的工具,然后单击Next进入下一个选择界面,如图7。 图7 7.在图7这个界面下需要选择仿真所用的机器人,这里几乎包含了所有的机器人类型,然后单击Next进入下一个选择界面,如图8。 图8
UEFI安装win10教程win10uefi安装的方法! 偶然碰到有网友咨询怎么安装win10,本来已经教程出得差不多了,今天就补齐最后一个,uefi安装win10! 老实说,因为win10刚出来的缘故,我也是测试了很多种安装方法,能安装成功的还真不多,失败的不说了,只说成功的方法: 一、制作启动盘 1、下载并安装U大师启动盘制作工具UEFI版 2、制作启动盘 第一步点击iso制作,将制作的iso文件保存在D盘更目录下面或者其他盘的根目录,注意不要放在桌面上,小编做过测试,如果放在桌面上,有时候会制作失失败! 第二步,点击一键制作,选定我们刚刚制作出来的iso文件,一般名字都是UDashi.ISO;
制作了,如果下图! 特殊情况:制作完了uefi启动盘之后,发现要放入系统,而系统文件大于4G,而我们的启动盘默认制作成fat32格式,那么你就要设置他的隐藏方式,如上图所示,将其设置成高级隐藏,然后再行制作,制作完成之后,格式化U盘,将U盘格式化成ntfs格式,这样就可以重新放入4G以上大小文件了,而且不影响启动盘的使用! 二、调整bios; 注意,如果你的bios本来就是uefi启动的此步略过;如果不是,请将bios设置成uefi 启动。
按快速启动键或者直接在bios里将u盘设置为第一启动项,进入启动盘。 四、调整分区; 如果你原本就是uefi启动,并且分区表格式是gpt的,有esp分区,直接格式化esp分区。 如果不是uefi启动的,请先转换磁盘为gpt分区,然后创建esp分区,具体方法,请看 顶部win8改装win7方法整理里面有详细的分区调整方法!
FANUC ROBOT培训 ——ROBOGUIDE培训课程介绍 表单 #: SFRT-011日 期:2013-04-12培训地点: SFR 供应商: 上海发那科机器人有限公司 联系人:陈 霞电 话: +86-21-50326902 所有培训课程名称: SFRT-001 操作员 SFRT-002 程序员 SFRT-003 程序员A SFRT-005电气维护 SFRT-006 电气维护(含基本操作) SFRT-007 机械维护 (含 基本操作) SFRT-008 综合课程(操作、 电气、机械维护) SFRT-009伺服枪培训 SFRT-010 弧焊枪培训 SFRT-011 ROBOGUIDE培训 SFRT-012 iRvision 2D培训SFRT-013操作员(喷涂) SFRT-014 程序员(喷涂) 课程名称:FANUC ROBOGUIDE 机器人控制器型号: FANUC ROBOGUIDE操作 课程内容:FANUC ROBOT操作及程序设计 课程对象:软件仿真人员 学前技能要求:高中或技校及以上文化水平、有一定的英文基础,已经掌握操作员课程内容; 自备电脑; 课程目的: 学员认真学完本课程内容即能成功完成如下工作: ?使用ROBOGUIDE完成机器人简单仿真建模 ?使用ROBOGUIDE进行仿真测试程序 ?使用ROBOGUIDE添加附加轴 课程时间 3天 开班人数(最少/最多) 5/8 每学员培训费用(含培训教材和工作午餐):3000元/人 (含税:6.0 %) 如需MANUAL 手册,费用另加
课程时间表: 第1天 9:00 – 11:20 课程介绍 上海发那科机器人有限公司主要产品介绍 ROBOGUIDE概述 ROBOGUIDE界面介绍 创建简单的Workcell ROBOGUIDE操作实践 Q/A 13:00 – 16:30 抓取和摆放工件实例介绍 仿真测试程序 ROBOGUIDE操作实践 Q/A 第2天 9:00 – 11:20 Module介绍及练习 附加轴添加和应用 ROBOGUIDE操作实践 Q/A 13:00 – 16:30 创建变位机 利用自建数模创建 利用模型库创建 ROBOGUIDE操作实践 Q/A 第3天 9:00 – 11:20 创建机器人行走轴 利用自建数模创建 利用模型库创建 ROBOGUIDE操作实践 Q/A 13:00 – 16:30 ROBOGUIDE和控制柜网络设定 Calibration介绍 ROBOGUIDE操作实践 Q/A 测试
WIN10 安装教程 WIN10自从出现,就一波接一波的听到或者感受到WIN10在以往操作系统上改变.可以说WIN10更易用,更人性化. WIN10推荐全新安装,原因多: 1),WIN10主要是以向以往WINDOWS用户推送更新的方法来传播,更新到WIN10的用户,可以保留原有的设置和原有的应用软件,但软件不兼容的问题多. 2),WIN10的驱动和以往系统的驱动大多不兼容,虽然WIN10自己带了修正,更新驱动的功能,但还是不尽如人意. 3),什么精灵,什么卫士,什么大师,什么管家,等等的优化软件,驱动软件,系统软件,给WIN10带来的莫名其妙的问题非常让人头疼. 4),WIN10主要的改变是网络功能,而且WIN10推荐的就是让用户使用网络账号,可计算机大虾们都知道,网络用户缺少太多的本地权限. 综合以上,我自己也来写一个WIN10的安装教程吧. 一,准备 公欲善其事,必先利其器.WIN10的安装盘是充分且必要的.制作WIN10安装盘的过程就不在详细说明了,不会的童鞋可以参照: 1):使用UltraISO工具制作可启动U盘. 2):WIN10 MSDN下载地址 为什么是U盘,U盘的系统安装U盘好处多多,用过了就知道. 二,安装 1,做好的U盘系统盘插电脑上,重启电脑,在出现LOGO画面的时候按F11(当然有的品牌是F12,有的是F10,有的是F7),本人是镭波的,按F11.选择你的U盘.(图1)
图1 2,安装程序启动,选择区域语言键盘,国人当然是简体中文,+8区,美式键盘(图2). 图2 3,现在安装(图3),在此还可以选择修复选项,WIN10出问题了可以点启动安装盘点修复.功能十分强大,喜欢折腾的童鞋自己折腾一下试试.
目录 第一章概述 ----------------------------------------------------------------------------------------------------------- 2 1、ROBOGUIDE简介 ----------------------------------------------------------------------------------------- 2 2、软件安装 ---------------------------------------------------------------------------------------------------- 2 3、新建Work cell ------------------------------------------------------------------------------------------- 14 第二章界面介绍和基本操作 --------------------------------------------------------------------------------- 20 1、界面介绍 -------------------------------------------------------------------------------------------------- 20 2、常用工具条功能介绍 --------------------------------------------------------------------------------- 21 3、基本操作 -------------------------------------------------------------------------------------------------- 25 第三章添加设备 -------------------------------------------------------------------------------------------------- 26 1、周边设备的添加 ---------------------------------------------------------------------------------------- 26 2、机器人相关设备的添加 ------------------------------------------------------------------------------ 33 第四章常用功能介绍-------------------------------------------------------------------------------------------- 48 1、ROBOGUIDE中TP的使用 --------------------------------------------------------------------------- 48 2、机器人相关功能 ---------------------------------------------------------------------------------------- 52 3、其它功能介绍-------------------------------------------------------------------------------------------- 56
Win10安装CATIAV5R21教程打开镜像文件,双击SET UP 设定安装目录(可改可不改)
自定义安装,去掉不要的语言(也可以不管,反正我没改) 全选
后面就一路下一步,等待安装 安装完后不要启动不要不要 打开破解文件夹_SolidSQUAD_V5R25,安装“DSLS_SSQ_V6R2015x_Installer_01042015.exe”,之后打开DS License Server Administration,点击Servers-new,在license server name输入你电脑的名字(桌面计算机图标,右键—属性—计算机名),双击status下的服务,红色框区域
记下电脑名字和电脑ID Server Name ton-doni Server ID WXN-41D21000CD1D41A2 关闭DS License Server Administration。 打开DSLS.LicGen.v1.5.SSQ.exe,点击generate! 保存证书文档 从破解文档里复制"Licenses" 文件夹,把文件夹粘贴到C:\ProgramData\DassaultSystemes\ 对于CATIA V5-6R2015 64位版本,复制文件..client\64-bit\netapi32.dll 到
2008年10月第1版- -. ROBOGUIDE 使用手册(弧焊部分基础篇)
目录 目录 (1) 第一章概述 (3) 1.1. 软件安装 (3) 1.2. 软件注册 (4) 1.3. 新建Workcell的步骤 (5) 1.3.1. 新建 (5) 1.3.2. 添加附加轴的设置 (11) 1.4. 添加焊枪,TCP设置。 (15) 1.5. Workcell的存储目录 (18) 1.6.鼠标操作 (19) 第二章创建变位机 (21) 3.1.利用自建数模创建 (21) 3.1.1.快速简易方法 (21) 3.1.2.导入外部模型方法 (32) 3.2.利用模型库创建 (42) 3.2.1.导入默认配置的模型库变位机 (42) 3.2.2.手动装配模型库变位机 (45) 第三章创建机器人行走轴 (50)
3.1. 行走轴-利用模型库 (50) 3.2. 行走轴-自建数模 (56) 第四章变位机协调功能 (63) 4.1. 单轴变位机协调功能设置 (63) 4.2. 单轴变位机协调功能示例 (71) 第五章添加其他外围设备 (73) 第六章仿真录像的制作 (76)
第一章概述 1.1. 软件安装 本教程中所用软件版本号为V6.407269 正确安装ROBOGUIDE ,先安装安装盘里的SimPRO,选择需要的虚拟机器人的软件版本。安装完SimPRO后再安装WeldPro。安装完,会要求注册;若未注册,有30天时间试用。 如果需要用到变位机协调功能,还需要安装MultiRobot Arc Package。
1.2. 软件注册 注册方法:打开WeldPRO程序,点击Help / Register WeldPRO 弹出如下窗口, 将此区域的数据Email给上海发那科,我们将 为您向公司本部申请密钥,然后将密钥回发给 您。 将我们提供的密钥填入此处(每 行前面框里打勾才能输入密钥)
ROBOGUIDE 使用手册(附加轴基础篇)QQ群:413515425
目录 第一章概述 (3) 1.1.ROBOGUIDE简介 (3) 1.2.软件安装 (3) 第二章建立基本仿真模型 (8) 2.1建立Workcell (8) 2.2 ROBOGUIDE仿真界面简介 (14) 2.2.1 常用工具条功能介绍 (14) 2.2.2 基本操作 (18) 2.2.3 机器人相关功能 (19) 2.2.4 其他功能介绍 (20) 第三章外部轴实例介绍 (22) 3.1 设置机器人属性 (22) 3.2 添加外部轴和TCP设置 (23) 3.2.1 添加外部轴的设置 (23) 3.2.2 焊枪模型的载入 (25) 第四章编程 (31) 4.1 添加一个Part (31) 4.2 编写TP程序 (32) 4.3编程注意事项及技巧 (34) 第五章创建机器人行走轴 (35) 5.1电机控制 (35) 5.2利用自建数模创建 (38) 5.3利用模型库创建 (41) 5.4点动行走轴 (41)
1.1.ROBOGUIDE简介 ROBOGUIDE是发那科机器人 界进行模拟,在这个三维世界 教,进一步来模拟它的运动轨迹 期时间。 ROBOGUIDE是一款核 ROBOGUIDE的仿真环境界面是传 1.2.软件安装 打开RoboguideV7.7, 在安装ROBOGUIDEV7.7 安装。若点击后无法安装,可打 动安装,如下图: 第一章概述 机器人公司提供的一个离线编程工具,它是围绕一个 维世界中模拟现实中的机器人和周边设备的布局,通过 动轨迹。通过这样的模拟可以验证方案的可行性同时 一款核心应用软件,具体的还包括搬运、弧焊、喷涂 面是传统的WINDOWS界面,由菜单栏,工具栏,状态 ,双击文件夹下setup.exe。首先会弹出如下图的对 .7前,需要先安装上图中所列出的组件,点击Intal 可打开安装文件下的Support文件夹,在其中选择 绕一个离线的三维世 通过其中的TP示 性同时获得准确的周 喷涂等其他模块。 状态栏等组成。 图的对话框: Intall会自动进行 中选择所列的组件手
Roboguide PaintPRO 简单教程 1.首先通过安装包安装roboguide 软件 2.安装完成后重新启动计算机 (安装过程省略) 3.鼠标点击开始→程序→FANUC Robotics→PaintPRO 4.进入软件界面,通过快捷图标(或者点击File→New Cell ) 进入新建单元界面(无特别需要,所有设置默认就可以)单击OK
5.进入单元项目设置(全新创建单击Next) 6.选择软件版本(默认最高版本单击Next)
7.进入机器人选择画面(这里我用P250iA/15 做演示),选择机器人单击Next 8.进入外部电机/第七轴电机选择(无第七轴不选择)单击Next
9.选择软件所用的插件(这里一般默认就可以)单击Next 10.确认单元配置信息,单击Finish 完成单元创建
11.进入模拟界面后先调整机器人位置(可以双击机器人或双击击左下方Cell Browser 中的机器人选项,在位置属性中修改坐标值及角度值改变机器人位置和方向,也可以通过鼠标拖拉坐标轴及按键盘shift 键通过鼠标旋转坐标轴改变机器人的位置和方向。) 进入机器人位置属性修改(所有位置修改都是相对与所建平面中心点既机器人初始位置原点),修改完成后单击Apply 12.修改机器人工作范围,双击机器人两侧的紫色区域或着双击Cell Browser 中Line Schedules下对应选项
进入工作范围设置 General 选项中默认即可;Frame选项中下拉任意选择后再选回Default选项点击Apply会出现判断左右手机器人对话框,选“是(Y)”为右手机器人选“否(N)”为左手机器人;在Boundaries选项中分别设置上边界及下边界(注意正负号,相对与平面中心点各轴方向)全部设置好点OK 13.安装工具,双击Cell Browser 下对应机器人下的Tooling 中对应第几个工具项弹出设置界面 在General选项中点击机器人图标选择工具点击OK
工具/原料 ? windows 10 ISO安装镜像 ? 方法/步骤 . 1 . 获取windows 10 ISO安装镜像:正版用户可前往微软社区获取windows 10 Technical Preview Build安装镜像,其他用户可前往MSDN I tell you-操作系 统- Windows-Technical Preview Build获取X86或X64的系统镜像安装文件,请根据你的内存容量进行位数选择 .
. . 2 . U盘启动盘刻录:Windows 10的安装方法和Windows 8的安装方法没有很大的区别,推荐将系统ISO镜像通过UltraISO刻录至4GB U盘,通过U盘来启动win 10的安装过程 . windows10 U盘启动盘刻录的方法: .
. . 3 . boot快捷启动快捷键:刻录windows10 U盘启动盘后重启计算机,按下boot快捷键进入启动快捷菜单,不同的机型有不同的启动快捷键,部分机型无启动快捷键就需要进入BIOS设置第一启动项。我是联想笔记本,启动LOGO也提示了按F12进入快捷启动菜单 .
. . 4 . Boot Options Menu:进入快捷启动菜单后方向键选择你插入的windows 10 U盘启动盘,回车键确认。如果是进入BISO将U盘设置为第一启动项则保存修改后直接启动U盘 .
. . 5 . Windows安装程序:启动U盘后自动读取刻录在U盘的系统启动信息,出现Windows安装程序窗口,要安装的语言,时间和货比格式,键盘和输入方法都默认,直接点击下一步 .
2011 年 06 月 第 1 版?
上海发那科机器人有限公司
ROBOGUIDE 使用手册
(HandlingPRO)
上海发那科机器人有限公司 广州分公司 TEL:020‐32052826 FAX:020‐32053400
0
上海发那科机器人有限公司
目录?
目录?........................................................................................................................?1 第一章 安装?..........................................................................................................?2?
1.1. 软件安装................................................................................................................?2 1.2. 软件注册................................................................................................................?2?
第二章 建立基本仿真模型?....................................................................................?4?
2.1 建立 Workcell?.......................................................................................................?4 2.2 编辑机器人?...........................................................................................................?9 2.3 Parts?.................................................................................................................... 11 2.4 编辑机器人手爪?................................................................................................. 12 2.5 Fixture?................................................................................................................. 17 2.6 obstacles?............................................................................................................. 21?
第三章 编程?........................................................................................................?25?
3.1?simulation 程序?...................................................................................................... 25 3.2 编写 TP 程序?......................................................................................................... 28 3.3 编程注意事项及技巧?............................................................................................ 30?
第四章 录像功能?.................................................................................................?33 第五章 建立 R2000iB/200T 仿真模型?.................................................................?35?
5.1 建立 Workcell?..................................................................................................... 35 5.2 J1 轴基本配置修改?............................................................................................. 50 5.3 编程。?.................................................................................................................. 54?
第六章 多台机器人仿真?.....................................................................................?55?
6.1 建立 Workcell?..................................................................................................... 55 6.2 信号配置?............................................................................................................. 64 6.3 编程?.................................................................................................................... 66 6.4 注意事项?............................................................................................................. 66?
1