习题七
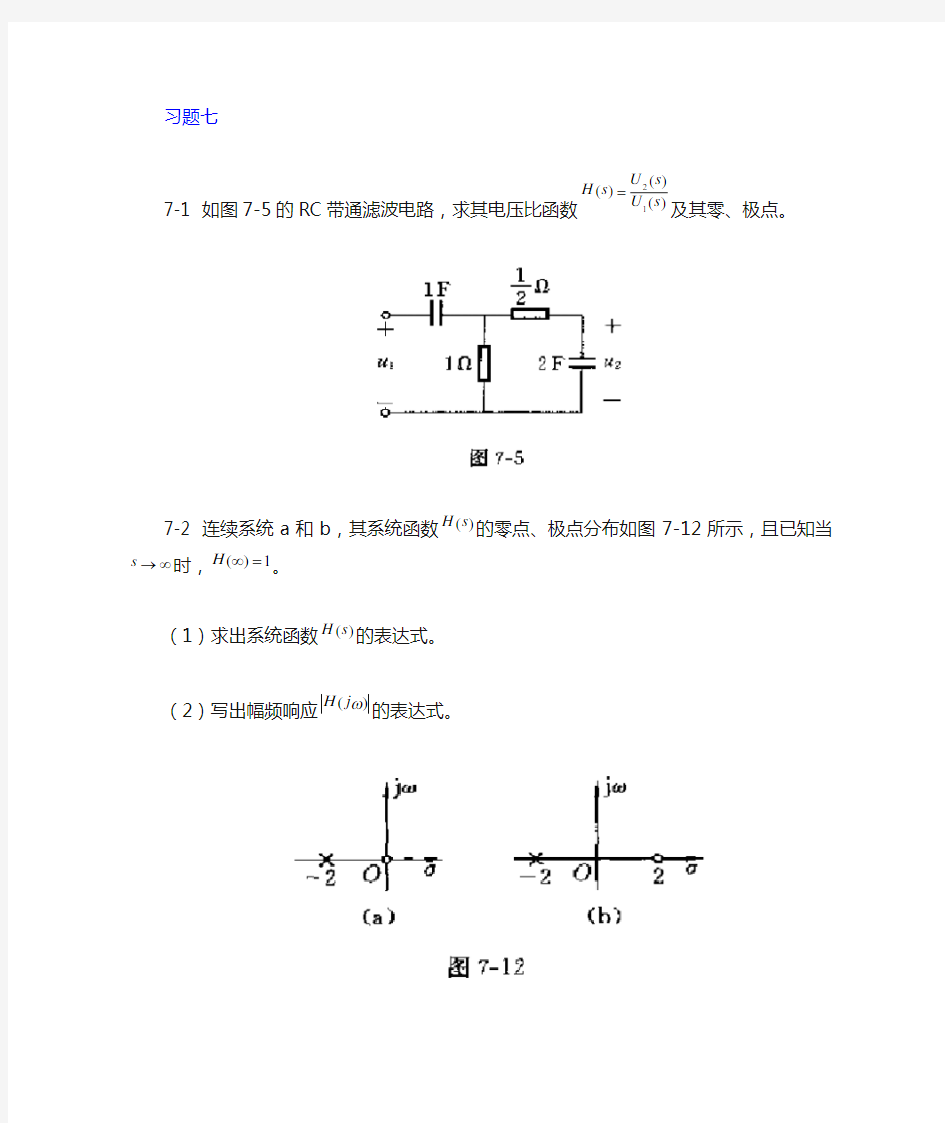
7-1 如图7-5的RC 带通滤波电路,求其电压比函数)
()
()(12s U s U s H =
及其零、极点。
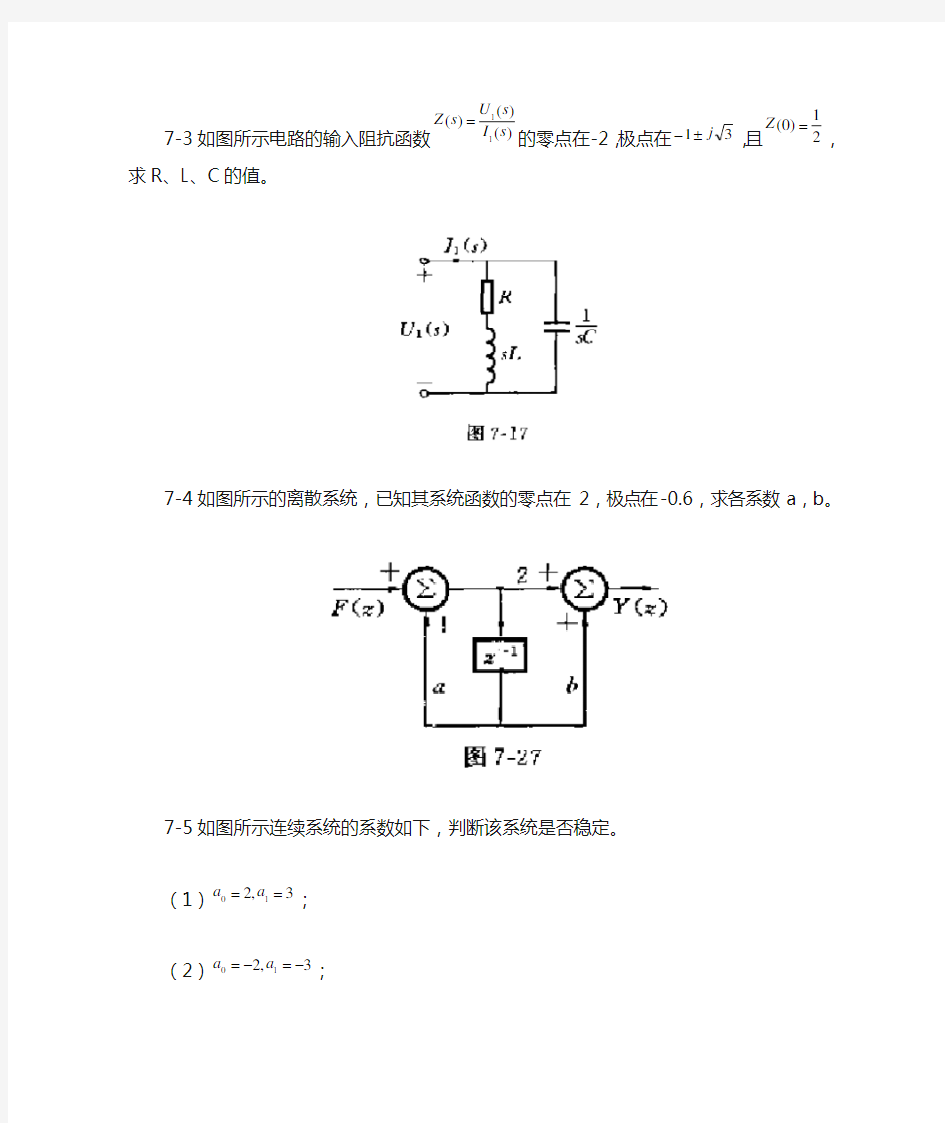
7-2 连续系统a 和b ,其系统函数)(s H 的零点、极点分布如图7-12所示,且已知当∞→s 时,1)(=∞H 。
(1)求出系统函数)(s H 的表达式。 (2)写出幅频响应)(ωj H 的表达式。
7-3如图所示电路的输入阻抗函数)
()
()(11s I s U s Z =的零点在-2,极点在31j ±-,且2
1
)0(=Z ,求R 、L 、C 的值。
7-4如图所示的离散系统,已知其系统函数的零点在2,极点在-0.6,求各系数a ,b 。
7-5如图所示连续系统的系数如下,判断该系统是否稳定。 (1)3,210==a a ; (2)3,210-=-=a a ; (3)3,210-==a a 。
7-6如图所示离散系统的系数如下,判断该系统是否稳定。
(1)1,21
10-==a a ;
(2)1,21
10==a a ;
(3)1,2
1
10=-=a a 。
7-7如图所示为反馈系统,已知4
4)(2++=s s s
s G ,K 为常数。为使系统稳定,试
确定K 值的范围。
7-8已知某离散系统的差分方程为
)1()2()1(5.1)(-=---+k f k y k y k y
(1) 若该系统为因果系统,求系统的单位序列响应h(k)。
(2) 若该系统为稳定系统,求系统的单位序列响应h(k),并计算输入
)()5.0()(k k f k ε-=时的零状态响应)(k y zs 。
7-9求图所示连续系统的系统函数)(s H 。
7-10画出图所示的信号流图,求出其系统函数)(s H 。
7-11如连续系统的系统函数如下,试用直接形式模拟此系统,画出其方框图。
(1))
3)(2)(1(1
+++-s s s s (3))3)(2)(1(542+++++s s s s s
7-12用级联形式和并联形式模拟7-11题的系统,并画出框图。
7-13如图所示为离散LTI 因果系统的信号流图。 (1)求系统函数)(z H 。 (2)列写出输入输出差分方程。 (3)判断该系统是否稳定。
7-14在系统的稳定性研究中,有时还应用“罗斯(Routh )判据或准则”,利用它可确定多项式的根是否都位于s 左半平面。这里只说明对二、三阶多项式的判据。二阶多项式βα++s s 2的根都位于s 左半平面的充分必要条件是:
0,0>>βα;对三阶多项式γβα+++s s s 23的根都位于s 左半平面的充分必要条件是:γαβγβα>>>>并且,0,0,0。根据上述结论,试判断下列各表达式的根是否都位于s 左半平面。
(1)652+-s s (2)9222++s s (3)112523+++s s s (4)s s s 21823++ (5)112523+--s s s
习题七答案 7-1
7-2
7-3
7-4
7-5
7-6
7-7
7-8
7-9
7-10
7-10
解 (a)由s 域系统框图可得系统的信号流图如图7-41(a)。流图中有一个回路。其增益为
(b)由s域系统框图可得系统的信号流图如图7-41(b)。流图中有一个回路。其增益为
7-11
(e)
(f)
图7-31
相应的方框图为图7-31(c)
7-12
信号流图为图7-32(c),响应的方框图为图7-32(d)。
(b)
(c)
(d)
分别画出)(1s H 和)(2s H 的信号流图,将两者级联即得)(s H 的信号流图,如图7-50(a)所示,其相应的方框图如图7-50(b)所示。
分别画出)(1s H 和)(2s H 和)(3s H 的信号流图,将三者并联即得)(s H 的信号流图,如图7-50(c)所示,其相应的方框图如图7-50(d)所示。 7-13
7-14
如果S yx 不为零,则可得系统的频响函数的第二种计算式 7.频响函数的估计(相干分析) 7.1. SISO 系统的频响函数及其估计 对于SISO 系统,其频响函数的估计有很多计算方法, 主要的有三种估计式。 在没有噪声污染的情况下,它们的估计是等价的。但是实际上,由于不可避免的 存在噪声,三种估计有所差异。 本节讨论在主要的三种噪声污染下,三种传统估计式与真值之间的误差 7.1.1. 随机激励下的频响函数 考虑一个SISO 时不变线性系统,其频率响应函数为H 。设随机输入和响 应信号分别为x(t)和y(t),其傅立叶变换分别为X()和Y(),贝U 有 上式两端乘以X * ,取时间平均及集合平均,并注意 H 与平均无关,则 lim - Y X * H lim - X X T T T T 如果S x 不为零,则可得系统的频响函数的第一种计算式 S xy S x 同样,如果在系统输入/出频谱式两端乘以Y * ,取时间平均和集合平均,得 S yx xy H S x H i S y
(1) H 2 将系统输入/出频谱式两端取共轭,得 * Y 乘以原输入/出频谱式,并去时间平均和集合平均,得 考虑一个SISO 时不变线性系统,其频率响应函数为 H 。设系统的实际 输入和响 应信号分别为u(t)和v(t),其傅立叶变换分别为U()和2(),它们的 测量信号分别为x(t)和y(t),其傅立叶变换分别为X()和Y()。 输出端噪声的影响 若只有输出端受到噪声信号n(t)的污染,并设它与系统的u(t)和v(t)无关 则有 S y S yx 7.1.2 S y H 2 S 可得系统的频响函数的幅值计算式 H a 2 S y S x 频响函数的估计方法
§7.4 非线性系统的描述函数分析法 一、描述函数法的基本概念 假设非线性系统的输入函数为 ) sin()(t X t x ω=非线性环节N x (t ) n(t ) 输出n(t)将是非正弦的周期信号。可以展成傅利叶级数,n(t)是由恒定分量、基波分量、和高次谐波组成。 假设1:如果非线性部分的特性曲线具有中心对称性质,那以输出信号n(t)的波形具有奇次对称性(波形的后半个周期重复前半个周期的变化,但符号相反)输出不含直流分量,输出响应的平均值为零。
假设2:线性部分具有良好的低通滤波性,那么高次谐波的幅值远小于基波。闭环通道内近似地只有一次谐波信号流通。对于一般的非线性系统而言这个条件是满足的,线性部分的低通滤波性越好,用描述函数法分析的精度越高。 上述两个假设满足时,非线性环节的输入是一个正弦信号,系统的输出是相同频率的正弦信号,对于非线性环节的输出只研究其基波成分就足够了。 假设系统中非线性环节的输入函数为 t X t x ωsin )(=输出信号可以展成傅利叶级数 ∑∑∞ =∞=++=++=1 010) sin(2)cos sin (2)(i i i i i i t i Y A t i B t i A A t n ?ωωω
?= π ωωπ 20 ) ()cos()(1 t d t i t n A i ?= π ωωπ 20 ) ()sin()(1 t d t i t n B i 2 2 i i i B A Y += i i i B A tg 1 -=?若非线性部分是齐次对称的,则A 0=0,线性部分又具有低通滤波特性,可以认为非线性环节的输出中只有基波分量能够通过闭环回路反馈到输入端。 输出部分的基波分量为 ) sin(cos sin )(11111?ωωω+=+=t Y t B t A t y ? =π ωωπ20 1) ()cos()(1 t d t t n A ? = π ωωπ20 1) ()sin()(1 t d t t n B 2 1211B A Y += 1 1 11B A tg -=?
习题七 7-1 如图7-5的RC 带通滤波电路,求其电压比函数) () ()(12s U s U s H = 及其零、极点。 7-2 连续系统a 和b ,其系统函数)(s H 的零点、极点分布如图7-12所示,且已知当∞→s 时,1)(=∞H 。 (1)求出系统函数)(s H 的表达式。 (2)写出幅频响应)(ωj H 的表达式。 7-3如图所示电路的输入阻抗函数) () ()(11s I s U s Z =的零点在-2,极点在31j ±-,且2 1 )0(=Z ,求R 、L 、C 的值。
7-4如图所示的离散系统,已知其系统函数的零点在2,极点在-0.6,求各系数a ,b 。 7-5如图所示连续系统的系数如下,判断该系统是否稳定。 (1)3,210==a a ; (2)3,210-=-=a a ; (3)3,210-==a a 。
7-6如图所示离散系统的系数如下,判断该系统是否稳定。 (1)1,21 10-==a a ; (2)1,21 10==a a ; (3)1,2 1 10=-=a a 。 7-7如图所示为反馈系统,已知4 4)(2++=s s s s G ,K 为常数。为使系统稳定,试 确定K 值的范围。 7-8已知某离散系统的差分方程为 )1()2()1(5.1)(-=---+k f k y k y k y (1) 若该系统为因果系统,求系统的单位序列响应h(k)。 (2) 若该系统为稳定系统,求系统的单位序列响应h(k),并计算输入 )()5.0()(k k f k ε-=时的零状态响应)(k y zs 。 7-9求图所示连续系统的系统函数)(s H 。
第七章 系统函数 一、单项选择题 X7.1(浙江大学2004考研题)一个因果、稳定的离散时间系统函数)(z H 的极点必定在z 平面的 。 (A )单位圆以外 (B )实轴上 (C )左半平面 (D )单位圆以内 H (s )只有一对在虚轴上的共轭极点,则它的h (t )应是 。 (A )指数增长信号 (B )指数衰减振荡信号 (C )常数 (D )等幅振荡信号 X7.3(浙江大学2003考研题)如果一离散时间系统的系统函数)(z H 只有一个在单位圆上实数为1的极点,则它的h (k )应是 。 (A )ε(k ) (B ))(k ε- (C ))()1(k k ε- (D )1 X7.4(浙江大学2002考研题)已知一连续系统的零、极点分布如图X7.4所示, 1)(=∞H ,则系统函数H (s )为 。 (A ) 2+s (B )1+s (C ))2)(1(++s s (D )1 -s X7.5(西安电子科技大学2004考研题)图X7.5所示信号流图的系统函数H (s )为 。 (A ) 26132+++s s s (B )2132++s s (C )26132--+s s s (D )1 21 2-+s s X7.6(哈尔滨工业大学2002考研题)下列几个因果系统函数中,稳定(包括临界稳定)的系统函数有 个。 (1) 4312+--s s s (2)s s s 312++ (3)3 42 3 4+++s s s (4)33223++++s s s s (5)1224++s s s (6)2 421 s s + (A )3 (B )2 (C )1 (D )4 X7.7(哈尔滨工业大学2002考研题)下面的几种描述中,正确的为 。