
第47卷
2018年7月
一一一一一一一一
一一一一一
船海工程
SHIP&OCEANENGINEERING
一一
一一一一一一一一一一一一
Vol.47
Jul.2018
一
一一
DOI:10.3963/j.issn.1671 ̄7953.2018.S1.033
船舶运动控制的舵机仿真改进
张志恒?张显库?周韬
(大连海事大学航海学院?辽宁大连116026)
摘一要:基于大连海事大学校船 育鲲 轮海试数据?在已有舵机特性的基础上增加了小的航向偏差不操舵环节和舵效维持环节?建立非线性Nomoto模型和MMG模型?进行仿真验证?仿真发现?在风浪流干扰作用下?在舵机特性中增加舵效维持环节模拟操舵响应缓慢特性?操舵频率和操舵幅度更符合航海实践?操舵效果与海试舵效基本一致?结果表明?用舵效维持模拟船舶操舵响应缓慢的特性更符合海试操舵效果?
关键词:船舶工程?船舶运动控制?仿真?零阶保持器?舵机
中图分类号:U675.79一一一一文献标志码:A一一一一文章编号:1671 ̄7953(2018)S1 ̄0154 ̄07
收稿日期:2018-03-11修回日期:2018-04-11
基金项目:国家自然科学基金(51679024)?中央高校
青年教师基本科研业务费(3132016315)
第一作者:张志恒(1991 )?男?硕士生研究方向:船舶运动控制和鲁棒控制
一一海洋运输是交通运输的重要方式?船舶运动控制是海洋运输研究的热点?实船实验是理论应用于实践验证的重要环节?但船舶实验成本较高?所以仿真实验成为研究者进行科研的重要手段?理论研究是更好工程应用的前提?本研究基于大连海事大学校船 育鲲 轮海试试验?根据舵角反馈器记录数据的特点?改进现有船舶运动控制仿真?本研究结合海试数据二船长经验及文献[1 ̄6]对航海操舵进行如下总结?
1)船舶如果不是在受限水域掉头或紧急避让?多数不采用大舵角?通常用小舵角来抑制船舶偏转?用中等舵角来进行转向或正常避让?
2)根据经验?航海实践中好的海况不操舵的
航向偏差一般限定为?0.5?~?1.0??恶劣海况不操舵的航向偏差一般限定为?3?~?5??
文献[7]采用自适应神经网络控制算法?船舶航向跟踪控制效果良好?但操舵频繁?文献[8]研究了二阶非线性多智能体系统的输出反馈同步控制?舵机操舵幅度小?操舵频繁?文献[9]基于RBF神经网络对2艘船舶进行仿真控制?但舵角在?0.1?范围内频繁操舵?文献[10 ̄12]的操舵频率为每次0.3~3s?对船舶航向保持控制
效果良好?但操舵频率较高?不符合航海实践?在航海实践中?舵机具有大惯性二舵角饱和和舵角速率限制二小的航向偏差不操舵二操舵频率低等特性?船舶运动的大惯性特点?时间常数为几十秒甚至是几百秒?操舵响应缓慢?在响应过程中舵角把定(维持)某个状态等待船舶状态调整?本研究以大连海事大学校船 育鲲 和 育鹏 为例?分别采用非线性Nomoto模型和MMG模型进行仿真验证?基于Nomoto模型?给出了包含舵机惯性环节二舵角饱和和舵角速率限制特性的非线性模型?在此基础上?分别增加了小的航向偏差不操舵环节二时滞环节以及零阶保持器(Zero-Order-Holder?ZOH[13])环节的仿真对比效果?基于MMG
模型?给出了包含舵机惯性环节二舵角饱和和舵角速率限制特性模型以及增加零阶保持器环节模型的航向保持控制和操舵的对比效果?
1一准备工作
为了仿真研究中舵效更接近航海实践?对舵
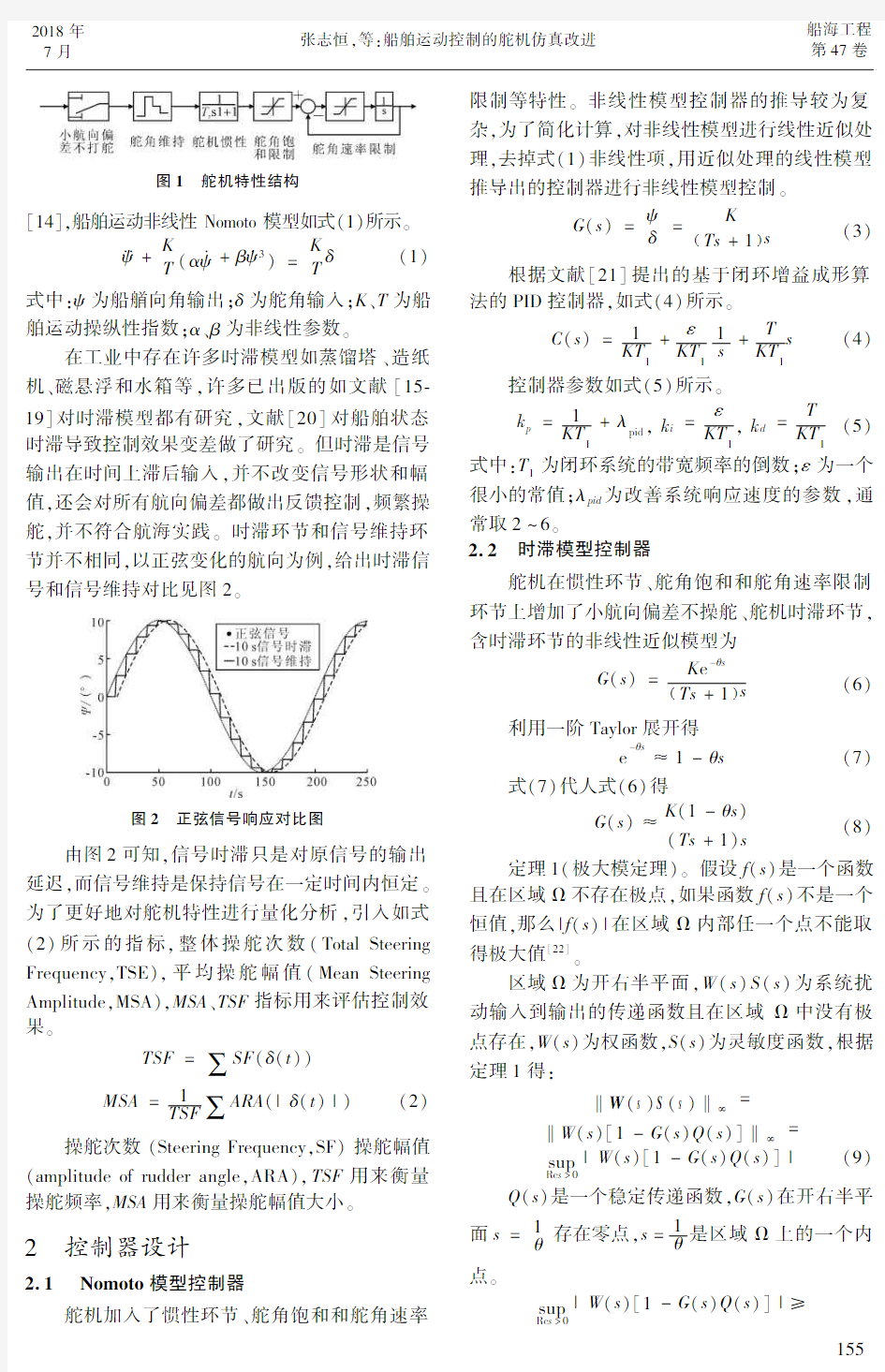
机加入了小航向偏差不操舵二舵角维持(或舵角时滞)二舵机惯性环节二舵角饱和和舵角速率限制等特性?舵机仿真结构见图1?结合航海实践?小的航向偏差取?1.0??舵角维持(每间隔操舵一次)设定为10s?舵机惯性为一阶惯性环节1
Trs+1?Tr
=5s?舵角范围为-35?~35??舵角速率范围为-5?/s~5?/s?
舵角维持环节和时滞环节对系统的响应产生干扰?控制输出不能很好地跟踪控制输入?根据文献
4
51
图1一舵机特性结构
[14]?船舶运动非线性Nomoto模型如式(1)所示?
ψ
+
KT(αψ +βψ 3)=K
T
δ(1)
式中:ψ为船艏向角输出?δ为舵角输入?K二T为船舶运动操纵性指数?α二β为非线性参数?
在工业中存在许多时滞模型如蒸馏塔二造纸机二磁悬浮和水箱等?许多已出版的如文献[15 ̄
19]对时滞模型都有研究?文献[20]对船舶状态时滞导致控制效果变差做了研究?但时滞是信号输出在时间上滞后输入?并不改变信号形状和幅值?还会对所有航向偏差都做出反馈控制?频繁操舵?并不符合航海实践?时滞环节和信号维持环节并不相同?以正弦变化的航向为例?给出时滞信号和信号维持对比见图
2?
图2一正弦信号响应对比图
由图2可知?信号时滞只是对原信号的输出延迟?而信号维持是保持信号在一定时间内恒定?为了更好地对舵机特性进行量化分析?引入如式(2)所示的指标?整体操舵次数(TotalSteeringFrequency?TSE)?平均操舵幅值(MeanSteeringAmplitude?MSA)?MSA二TSF指标用来评估控制效
果?
TSF=eSF(δ(t))
MSA=
1
TSF
eARA(|δ(t)|)
(2)一一操舵次数(SteeringFrequency?SF)操舵幅值(amplitudeofrudderangle?ARA)?TSF用来衡量操舵频率?MSA用来衡量操舵幅值大小?
2一控制器设计
2.1一
Nomoto模型控制器
舵机加入了惯性环节二舵角饱和和舵角速率
限制等特性?非线性模型控制器的推导较为复杂?为了简化计算?对非线性模型进行线性近似处理?去掉式(1)非线性项?用近似处理的线性模型
推导出的控制器进行非线性模型控制?
G(s)=
ψδ
=KTs+1()s
(3)
一一根据文献[21]提出的基于闭环增益成形算法的PID控制器?如式(4)所示?
C(s)=
1KT1+εKT11s+T
KT1
s(4)
一一控制器参数如式(5)所示?
kp=
1KT1+λpid?ki=εKT1?kd=TKT1
(5)式中:T1为闭环系统的带宽频率的倒数?ε为一个很小的常值?λpid为改善系统响应速度的参数?通常取2~6?
2.2一时滞模型控制器
舵机在惯性环节二舵角饱和和舵角速率限制环节上增加了小航向偏差不操舵二舵机时滞环节?含时滞环节的非线性近似模型为
G(s)=
Ke-θsTs+1()s(6)一一利用一阶Taylor展开得e-θs?1-θs
(7)一一式(7)代人式(6)得
G(s)?
K(1-θs)(Ts+1)s
(8)
一一定理1(极大模定理)?假设f(s)是一个函数且在区域Ω不存在极点?如果函数f(s)不是一个恒值?那么|f(s)|在区域Ω内部任一个点不能取得极大值[22]?
区域Ω为开右半平面?W(s)S(s)为系统扰
动输入到输出的传递函数且在区域Ω中没有极点存在?W(s)为权函数?S(s)为灵敏度函数?根据定理1得:
W(s)S(s) ?=
W(s)[1-G(s)Q(s)] ?=
supRes>0
|W(s)[1-G(s)Q(s)]|
(9)
一一Q(s)是一个稳定传递函数?G(s)在开右半平面s=1
θ
存在零点?s=1θ是区域Ω上的一个内
点?
supRes>0
|W(s)[1-G(s)Q(s)]|?
5
51
||W(s)[1-G(s)Q(s)]|
s=1
θ
|=θ(10)
一一由式(10)得 W(s)S(s) ?的最小值为θ?假如系统输入d(s)为阶跃信号1/s?权函数W(s)在H?鲁棒控制中应满足 d(s)/W(s) 2?1?式
(10)W(s)取1/s?式(8)代人式(10)得
W(s)[1-G(s)Q(s)] =
1s1-K(1-θs)(Ts+1)s
Q(s)[]
?
=θ(11)
一一唯一最优解为
Qopt(s)=Ts2
+s
K
(12)
一一Qopt(s)为非正则函数?渐近收敛性要求:
lims?0
S(s)=
lims?0
1
-G(s)Q(s)[]
=0(13)
将式(14)所示的滤波器引入使Qopt(s)在高频衰减?
J(s)=
1
(λdelays+1)2
(14)
一一一个次优正则Q(s)为
Q(s)=Qopt(s)J(s)=Ts2
+sK 1
(λdelays+1)2
(15)
一一单位反馈控制器为
C(s)=
Q(s)
1-G(s)Q(s)
=
1K Ts2+sλ2
delays2+(2λdelay+θ)s
(16)
一一参数λdelay通常取0.5θ~2.0θ?
2.3一ZOH模型控制器
舵机在惯性环节二舵角饱和和舵角速率限制环节上增加了小航向偏差不操舵二舵机ZOH环节?含ZOH环节的非线性近似模型为
G(s)=
K(1-e-θs)
(Ts+1)s2
(17)
一一ZOH的传递函数中的eθs项展开成幂级数?并取前两项?则有:
1-e-θss=1s1-1
eθs()
?θ1+θs(18)一一式(18)代人式(17)得
G(s)?
Kθ
θs+1()(Ts+1)s
(19)
W(s)S(s) ?=
W(s)[1-G(s)Q(s)] ?=
supRes>0
|W(s)[1-G(s)Q(s)]|
(20)
一一W(s)仍取1/s?要保证W(s)S(s)?的最小值?渐近收敛性要求:
lims?
0S(s)=lims?
0
1-G(s)Q(s)[]=0(21)
一一式(21)代人式(20)得
W(s)1-G(s)Q(s)[] ?=
1s1-Kθ(θs+1)(Ts+1)sQ(s)[
]
?
=0(22)一一唯一最优解为
Qopt(s)=
1
+θs()Ts+1()s
Kθ
(23)
一一Qopt(s)为非正则函数?式(24)所示的滤波器引入使Qopt(s)在高频衰减
J(s)=
1(0.01λzohs+1)(0.6λzohs+1)(2λzohs+1)+1(24)
一一一个次优正则Q(s)为
Q(s)=Qopt(s)J(s)=
(1+θs)(Ts+1)s
Kθ[(0.01λzohs+1)(0.6λzohs+1)(2λzohs+1)+1](25)
一一单位反馈控制器为
C(s)=
Q(s)
1-G(s)Q(s)
=
1
Kθ 1+θs()Ts+1()0.012λ3
zohs2+1.226λ2zohs+2.61λzoh+1
(26)
一一参数λzoh通常取0.5θ~2.0θ?
3一仿真实验
3.1一风浪流仿真
船舶在海上航行受到风浪流的干扰?使船舶偏离计划航线而浪费能源?船舶受风可以分为平均风和脉动风?根据文献[23]平均风力干扰等效为压舵角?根据文献[24]脉动风是由大气的湍流所造成的?脉动风可以认为是某种白噪声的实现?该白噪声的标准差σY?σN与绝对风速VT的平方成正比
σY=0.2ρAV2T|CY(γR)|L3
σN=0.2ρAV2T|CN(γR)|L
3(27)
式中:ρA为空气密度?CY(γR)?CN(γR)为量纲的量的风力和风力矩系数?L为船长?
海浪干扰由风干扰模型耦合产生?风速Vwind
6
51
=15.25m/s?风向ψwind=50??即为在蒲福风7级
情况下充分成长生成的海浪?图3给出了试验海浪干扰的三维视图
?
图3一蒲福风7级条件下海浪模型干扰三维视图
研究中将海流认定为定常流?流速均匀且恒
定?海流Vcurrent=0.5m/s?流向βcurrent=280??则有速度平衡方程如式(28):
x 0=ucosψ-vsinψ+Vccosγcy 0
=usinψ+vcosψ+Vcsinγc
(28)
式中:Vc二γc分别为流的绝对速度和绝对流向?见图
5?
图4一流的干扰
3.2一Nomoto模型仿真
以大连海事大学校船 育鲲 为例?船舶参
数:两柱间长为105m?船宽为18m?吃水为5.4
m?方形系数为0.5595?排水体积为5735.5m3
?重心距中心距离为0.51m?舵叶面积为11.46m2?船速为16.7kn?由船舶参数计算船舶操纵性指数K=0.31s-1?T=64.53s?系统辨识计算非线性参数α=8.0?β=4295.02?
海风为蒲福风7级Vwind﹦15.25m/s?风向
ψwind=50??海浪为在蒲福风7级情况下充分成长生成的?海流认定为定常流?海流Vcurrent=
0.5m/s?流向βcurrent=280??航向设定为50??图5给出了非线性Nomoto模型(式(5)控制)二加入时滞环节模型(式(16)控制)和加入ZOH环节模型(式(26)控制)航向保持控制效果?加入时滞环节(时滞模型)和加入ZOH环节(ZOH模型)不操舵小航向偏差都设为?1.0??时滞模型用时滞环节来模拟船舶操舵响应缓慢的特性?时滞时间设为10s?ZOH模型用零阶保持器来模拟船舶操舵响应缓慢的特性?操舵频率设为10s一次?式(5)取λpid=2?式(16)和式(26)控制器参数取λdelay=λzoh=θ?仿真发现不考虑船舶响应缓慢大惯性特点的Nomoto模型?PID控制器控制效果良好?航向无超调?调节时间Ts约为100s?用时滞环节来模拟船舶操舵响应缓慢特性的时滞模型和用零阶保持器来模拟船舶操舵响应缓慢特性ZOH模型?航向无超调?调节时间Ts约为360s?
与传统的PID控制Nomoto模型相比?时滞模型和ZOH模型航向保持控制效果良好?但都比PID控制效果稍差
?
图5一育鲲轮航向保持控制对比图
Nomoto模型二时滞模型和ZOH模型的操舵
效果对比见图6?仿真表明?Nomoto模型PID控
制效果较好?但操舵频率高二操舵幅度太大?与航海实践不符?时滞模型虽然操舵幅度小?但操舵频率较高也不符合航海实践?ZOH模型用零阶保持器来模拟船舶操舵响应缓慢特性?操舵频率和操舵幅度?与育鲲轮海试效果基本一致?验证了零阶保持器模拟船舶操舵响应缓慢特性的合理性
?
图6一育鲲轮舵角效果对比图
为了进一步验证用零阶保持器来模拟船舶操舵响应缓慢特性的合理性?以文献[25]精确度较高的大连海事校船 育鹏 轮为例进行仿真实验? 育鹏 轮船舶参数见表1?由船舶参数计算船舶
7
51
操纵性指数K=0.08s-1?T=39.09s?系统辨识计算非线性参数α=18.59?β=20732.50?
表1一育鹏轮船舶参数
pid式(26)控制器参数取λdelay=λzoh=θ?育鹏轮航向控制效果对比见图7a)?Nomoto模型PID控制器控制效果良好
?航向无超调?调节时间Ts约为100s?时滞模型航向控制无超调?调节时间Ts约为170s?ZOH模型航向控制无超调?调节时间Ts约为140s?Nomoto模型二时滞模型和ZOH模型航向保持控制效果全部良好?操舵效果对比见图7b)?仿真发现Nomoto模型PID控制操舵幅度大二操舵频率较高?时滞模型操舵幅度小二但操舵频率较高?而只有ZOH模型操舵频率二操舵幅度与 育
鲲 轮海试舵效一致?进一步验证了用零阶保持器来模拟船舶操舵响应缓慢特性的合理性和控制器设计准则的正确性?
图7一育鹏轮控制效果对比
对 育鲲 和 育鹏 轮仿真控制结果进行量化分析?见表3?当采样时间为1000s时?不考虑舵机特性的Nomoto模型TSF较高平均约233次?加入时滞环节的模型TSF平均131次?MSA平均约为1.13?操舵频率高二操舵幅度小?舵机磨损严重?不符合航海实践?加入ZOH环节的模型TSF平均约为25次(根据航向误差?舵机有时处于把定状态)?MSA平均约为5.13?相对Nomoto模型?TSF约降低89%?MSA约降低55.5%?操舵频率和操舵幅度符合航海实践?
表2一控制效果量化分析
类别
TSFMSA时滞
1380.8168育鲲
ZOH253.6258Nomoto2518.0867时滞1241.4531育鹏
ZOH246.6345Nomoto
214
14.9719
3.3一MMG模型仿真
日本拖曳水池委员会成立的船舶操纵运动数学模型研讨小组?开发了一套系统的船舶运动建模方法?称为MMG模型?MMG模型将作用于船舶上的流体动力按照物理意义分解?然后考虑它们之间的相互干涉?最终构建出船舶运动数学模型?如式(29)所示?
(m+mx)u
-(m+my)vr-mxGr2=XH+XP+XR(m+my)v
+(m+mx)ur+mxGr =YH+YP+YR
(Izz+Jzz)r +mxG(v
+ur)=NH+NP+NRψ
=rx
0=ucosψ-vsinψy
0=vcosψ+usinψ
ì?í?
??
??????(29)
式中:u二v二x0二y0二n分别为线速度和角速度?位置?螺旋桨转速?m和Izz为船舶质量和惯性矩?mx二my二Jzz为附加质量和惯性矩?XH二YH二NH二XP二YP二NP二XR二YR二NR分别为作用于船体二螺旋桨和舵叶的流体动力和力矩[26]?
蒲福风7级条件作用下风浪流干扰保持不变?用零阶保持器来模拟船舶操舵响应缓慢特性的ZOH模型和MMG模型航向保持控制效果见图
8?航向保持控制效果基本一致?
操舵效果对比见图9?仿真表明用零阶保持
器来模拟船舶舵机特性的ZOH模型?操舵频率明显降低?操舵幅度符合航海实践?
基于MMG模型对 育鹏 轮控制结果进行量化分析见表3?当采样时间为1000s时?在MMG模型中加入零阶保持器后?操舵频率TSF从74
8
51
图8一MMG
模型航向保持控制对比
图9一MMG模型舵角效果对比
降低到18?约降低76%?符合工程实践中船舶大惯性二操舵频率低等特点?操舵幅度MSA从
2.0390增加到4.3510?约增加113%?符合航海实践中用小舵角抑制偏差的操舵特点?量化分析结果基本和表2一致?进一步验证了加入零阶保持器模拟舵机特性的合理性?
表3一控制效果量化分析类别TSFMSAZOH
184.3510MMG74
2.0390
4一结论
针对已发表的船舶运动控制仿真文献操舵频
繁的问题?通过对 育鲲 轮海试数据的分析?提出了用舵效维持环节来模拟船舶运动具有大惯性二操舵响应缓慢的特点?以大连海事大学校船 育鲲 和 育鹏 为例?分别采用非线性Nomoto模型和MMG模型进行仿真验证?在考虑风浪流干扰的情况进行仿真实验?实验表明?基于非线性Nomoto模型?加入时滞环节的模型和加入ZOH环节的模型?航向保持控制效果良好?但加入ZOH环节的模型操舵频率和操舵幅度更符合航海实践?操舵效果和海试舵效基本一致?基于MMG模型?加入ZOH环节操舵频率符合船舶大惯性二操舵频率低等特点?操舵幅度符合航海实践中用小舵角抑制偏差的操舵特点?本研究提出的
ZOH模型使船舶运动控制仿真操舵更接近航海实践?在工程实践中?零阶保持器可以用寄存器来实现?为解决工程应用中舵机频繁操舵磨损严重的问题提供了参考?具有重要的理论价值和工程应用价值?
参考文献
[1]黄斌?王永生.基于PI控制器的船舶加速过程负荷控制[J].西南交通大学学报?2012?47(5):842 ̄847.
[2]PAFFETTJ.Shipmaneuveringcharacteristics[J].TheJournalofNavigation?1981?34(2):165 ̄186.[3]CZAPLEWSKIK?ZWOLANP.Avessel'smathematical
modelanditsrealcounterpart:acomparativemethodolo ̄gybasedonarealworldstudy[J].TheJournalofNavi ̄gation?2016?69(6):1379 ̄1392.
[4]洪碧光?贾传荧.大型船舶操纵性能综合评价[J].交
通运输工程学报?2002?2(2):55 ̄58.[5]洪碧光?王鹏晖?张秀凤?等.基于CFD的无压载水船
型浅水中岸壁效应数值模拟[J].船海工程?2017?46(2):6 ̄11.
[6]KEMPJ.Williamdampier:navigatorextraordinary[J].TheJournalofNavigation?2014?67(4):545 ̄567.[7]林郁?苗保彬.基于Backstepping和输入饱和的船舶航向跟踪控制[J].大连海事大学学报?2014?40(3):
28 ̄30.
[8]王巍?王丹?彭周华.二阶非线性多智能体系统的输
出反馈同步控制[J].大连海事大学学报?2015?41(4):55 ̄57.
[9]刘洋?郭晨.船舶航向保持RBF神经网络自适应非线性控制[J].大连海事大学学报?2013?39(4):2 ̄4.[10]张显库.基于Lyapunov稳定性的船舶航向保持非线
性控制[J].西南交通大学学报?2010?45(1):
140 ̄143.
[11]ZHANGXianku?ZHANGGuoqing.Designofship
coursekeepingautopilotusingasinefunctionbasednonlinearfeedbacktechnique[J].TheJournalofNavi ̄gation?2015?69(2):246 ̄256.
[12]张松涛?任光.基于反馈线性化的船舶航向保持模
糊自适应控制[J]?交通运输工程学报?2005?5(4):
72 ̄76.
[13]TAKENORIA?MESSNERW.CompensatingforZOH
inducedresidualvibrationsinheadpositioningcontrolofharddiskdrives[J].IEEE/ASMETransactionsonMechatronics?2014?19(1):258 ̄268.
[14]张显库?王新屏?朱璐.关于船舶Nomoto模型的进一步思考[J].航海技术?2008(2):2 ̄3.
[15]LEIZhengling?GUOChen.Disturbancerejectioncon ̄
9
51
trolsolutionforshipsteeringsystemwithuncertaintime
delay[J].OceanEngineering?2015?95(1):78 ̄83. [16]赵青?刘媛媛?张卫东.时滞反向响应过程的数字控制设计方法[J].上海交通大学学报?2017?41(8):1310 ̄1313.
[17]ZHANGGuoqing?ZHANGXianku?GUANWei.Sta ̄bilityanalysisanddesignofintegratingunstabledelay
usingthemirrormappingtechnique[J].Journalof
ProcessControl?2014?24(7):1038 ̄1045.
[18]ZHANGWenjun?LIUZhengjiang?YINJianchuan.
Timedelaywaveletnetworkpredictorbasedonsensitiv ̄
ityanalysiswithapplicationtopredictiveshipcourse
control[J].JournalofComputationalMethodsinSci ̄
encesandEngineering?2016?16(2):391 ̄402. [19]杨功流?郭蔚林?袁二凯.姿态匹配法测量船体变形角中时间延迟的补偿[J].光学精密工程?2015?23
(5):1409 ̄1414.
[20]魏恩平.考虑时滞和输入饱和的船舶航向自操舵设计[D].大连:大连海事大学?2013.[21]ZHANGXianku?ZHANGGuoqing.Stabilizationofpureunstabledelaysystemsbythemirrormapping
technique[J].JournalofProcessControl?2013?23
(10):1465 ̄1470.
[22]ZHANGWeidong.QuantitativeProcessControlTheory[M].NewYork:CRCPress?2011.
[23]贾欣乐?张显库.风力等效舵角及应用[J].中国造船?2015?56(3):117 ̄123.
[24]KALLSTROMCG.Identificationandadaptivecontrolappliedtoshipsteering[D].Lund:LundInstituteof
Technology?1982.
[25]ZHANGZhiheng?ZHANGXianku?ZHANGGuoqing.
Nonlinearresponsemathematicalmodelofyupengship
[C].TechnicalCommitteeonControlTheory.The36thChineseControlConference.Piscataway?NJ:
IEEEConferencePublications?2017:4688 ̄4691. [26]FOSSEN/T.I.Handbookofmarinecrafthydrodynam ̄icsandmotioncontrol[M].NewYork:JohnWiley&
SonsLtd?2011.
ImprovementofSteeringEngineSimulationforShipMotionControl
ZHANGZhi ̄heng?ZHANGXian ̄ku?ZHOUTao
(SchoolofNavigation?DalianMaritimeUniversity?DalianLiaoning116026?China)Abstract:Inordertomakethesimulationofshipmotioncontrolbetterforengineeringapplication?thesimulationwasim ̄provedbyanalyzingtheseatrialdataofDalianMaritimeUniversitytrainingshipYukun.Basedontheanalysisofseatrialdata?smallnon ̄steeringheadingdeviationlinkandrudderanglemaintaininglinkwereaddedintoalreadyexistedsteeringcharacteris ̄tics.AnonlinearNomotomodelandaMMGmodelwereestablishedforsimulation.Itwasfoundthattheslowresponsecharacterofsteeringissimulatedbyrudderanglemaintaininglink?whosefrequencyandamplitudeareaccordancewiththoseofseatrialunderthedisturbanceofwind?waveandcurrent?thesteeringeffectwasconsistentwithseatrialresults.Theresultsindicatedthattheslowresponsecharacterofsteeringinnauticalpracticeisinlinewiththesimulationofrudderanglemaintaininglink.
Keywords:shipengineering?shipmotioncontrol?simulation?zeroorderholder?steeringengine
061
船舶紧急情况应急预案 The latest revision on November 22, 2020
船舶紧急情况应急预案 本预案旨在保证船长和船员在船舶发生事故或紧急情况时做出有效反应,提供应急操作指南,最大限度地减少船舶紧急情况造成人员伤亡、环境污染和财产损失。 一、船上应急领导小组 组长:船长 副组长:轮机长 二、职责 1、船长:在船上事故和紧急情况中任全船总指挥,对处置紧急情况负全责,对船舶有控制权。并负责应急通信,保证船舶与外界通信畅通(包括了望、联络、发布指令和记录等)。 2、轮机长:在事故和紧急情况过程中任机舱总指挥,负责船舶所有机电设备的控制。 三、报告 1、船长组织船员施救的同时,及时报告公司和所辖区域的海事等管理机构,为了不耽误应急响应时机,最初报告的资料应至少应包括:船名、船位(港口/泊位);事故的性质(碰撞、搁浅、火灾、泄漏等);损害的性质和程序;涉及其他船舶的船名、船型、船籍和状况;要求协助的性质;已经申请的服务;气候预报;其他有关的说明;报告日期和时间。 2、如果发生液货溢漏事故,应增加报告溢漏液货的种类;事故原因(如泄漏、爆裂、船体损坏等);估计泄漏流率和泄漏量;是否已由船舶或第三方进行了清除工作。 3、船长或船长指定负责通信的人员应始终保持与公司联络畅通,直至船舶紧急情况解除。 四、船舶碰撞事故应急处置 1、立即检查本船有无人员伤亡。 2、检查了解碰撞部位损坏情况,是否处于危险状态,是否需要救助。 3、检查碰撞部位是否进水或溢漏液货,进水或溢漏液货程度。
4、如二船相碰,一船艏已嵌入另一船体内,特别是在水线以下时,应了解嵌入面积,损坏情况,进水或溢漏程度等。 5、如发生人员伤亡应先行组织抢救。 6、如对方船被撞后处于危险状态,而本船并无严重危险,应使用本船救生设备尽快抢救对方船上的人员。 7、如船艏嵌入另一船体时,是否立即倒车脱离应视情而定,如倒车可能招至另一船沉没,不倒车对我船无严重威胁时,则暂不倒车,应等对方做好堵漏准备工作且同意倒车时,方可退出。 8、为减少冲力,不使碰撞部位扩大,可适当使用倒车。当仅有很小冲力时,撞入船应停车改用微速前进,利用船艏塞住破洞,减少进水量,为被撞入船争取时间防水堵漏。为防止船艏滑出,可以系带缆绳。如附近有浅滩,在被撞入船同意下,可将其推向浅滩座浅。如二船决定脱离,条件许可时,还应协助被撞入船将破洞置于下风,减少进水或溢漏液货,以利抢救。 9、如不倒车可能招至二船都要沉没时,则撞入船适时倒出。 10、被撞后,如进水或溢漏液货严重,应立即选择安全合适的沙质浅滩,进行抢滩。如附近无沙滩时,亦可抢座硬质浅滩。 11、当船舶受损严重处于沉没、倾覆、爆炸等严重危险时,经抢救确属无效,为保证人员生命安全,船长有权从其专业判断采取必要的措施,下达弃船命令。如情况允许,船长必须将弃船情况和理由电告公司。 五、船舶搁浅事故应急处置 1、如在感潮河段,可采取紧急抛锚,固定船位,以利高潮时起浮。 2、如动车脱浅,应注意记录使用主机情况、推进器尾轴、推力轴承等异常情况及损坏情况。 3、吊拖船队发生搁浅、触礁不能行动时则应立即解队,将未搁浅的驳船拖往附近安全地带锚泊。 4、在对搁浅、触礁船舶施救时,缆绳以软缆为宜,用丙稀或尼龙太平缆绳拖带,长短适宜。松、收缆时应防止绞缠推进器。松缆绳时要理清拖缆,缆绳系好后,所有人员必须离开缆绳附近,用车时切忌猛增车速,防止崩断拖缆,脱浅时注意搁浅船的冲势,避免碰撞。
第七章船舶事故处理应急预案 根据船舶进港锚泊及装卸作业特点和附近水域状况,将作业应急预案分为以下几点: 1)缆绳断裂应急处置预案 2)船舶碰撞码头应急处置预案 3)船舶靠泊期间强风应急处置预案 4)船舶防风(台)应急处置预案 5)船舶失控应急处置预案 6)船舶搁浅应急处置预案 7)船舶发生火灾时应急处置预案 8)船舶进水应急处置预案 9)人员落水应急处置预案 10)重大污染事故应急处置预案 7.1 缆绳断裂应急处置预案 1、船舶缆绳断裂事故发生后,发现人应按公司规定的程序汇报,汇报时应说明船舶缆绳断裂事故发生的泊位名称、事故船船舶名称、船舶作业状态、船舶装卸货物名称、事故严重程度等。 2、调度室接到船舶缆绳断裂严重事故报告后,应立即向海事搜救中心报警求援。 3、如有人员受伤,应立即拨打医院急救电话。 4、码头当班值班主管为事故现场临时指挥,部门经理到达现场后,由部门经理担任现场指挥。
5、当船舶发生位移,系船缆绳发出异常声响时,作业人员应立即撤离缆绳断裂伤害区域。 6、立即通知船方停止作业。 7、断缆事故发生后,立即清点码头作业人员,确认有无受伤或失踪人员,必要时向海事搜救中心、长航公安局指挥中心报警求援。 8、如果缆绳断裂、船舶位移则使用配备钢丝缆绳,延长时间。同时,靠码头泊位的大马力拖轮立即出动,顶推船舶,以稳住险情。 9、稳住险情后,会同各部门作好处理解决方案。 10、确定码头设备受损情况,采取相应修复措施。 11、事故处理人员应穿好救生衣,必要时佩戴劳动保护用品。7.2 船舶碰撞码头应急处置预案 1、船舶碰撞码头事故发生后,发现人应按公司规定的程序汇报,汇报时应说明船舶碰撞码头事故发生的泊位名称、事故船船舶名称、船舶装载货物名称、事故严重程度等。 2、调度室接到船舶碰撞码头严重事故报告后,应立即向海事搜救中心报警求援。 3、如有人员受伤,应立即拨打医院急救电话。 4、码头当班值班主管为事故现场临时指挥,部门经理到达现场后,由部门经理担任现场指挥。 5、当发生船舶碰撞码头事故时,立即停止码头所有装卸作业。 6、清点码头作业人员,确认有无受伤或失踪人员,必要时向海
DIYer修炼:舵机知识扫盲 双向电梯 ? 1 简介 ? 2 舵机的结构和原理 ? 3 选择舵机 ? 4 舵机的支架和连接装置 ? 5 如何控制舵机 ? 6 舵机应用:云台网络摄像头 ?7 如何DIY连续旋转的舵机 ?8 连续旋转舵机的应用:5分钟的绘图机器人 1 简介 舵机控制的机器人 ● 我猜你肯定在机器人和电动玩具中见到过这个小东西,至少也听到过它转起来时那与众不同的“吱吱吱”的叫声。对,它就是遥控舵机,常用在机器人技术、电影效果制作和木偶控制当中,不过让人大跌眼镜的是,它竟是为控制玩具汽车
和飞机才设计的。 ● 舵机的旋转不像普通电机那样只是古板的转圈圈,它可以根据你的指令旋转到0至180度之间的任意角度然后精准的停下来。如果你想让某个东西按你的想法运动,舵机可是个不错的选择,它控制方便、最易实现,而且种类繁多,总能有一款适合你呦。 ● 用不着太复杂的改动,舵机就可摇身一变成为一个高性能的、数字控制的、并且可调速的齿轮电机。在这篇文章中,我会介绍舵机使用的的一些基础知识以及怎样制作一个连续运转舵机。 2 舵机的结构和原理
A.标准舵机图解 ● 遥控舵机(或简称舵机)是个糅合了多项技术的科技结晶体,它由直流电机、减速齿轮组、传感器和控制电路组成,是一套自动控制装置,神马叫自动控制呢?所谓自动控制就是用一个闭环反馈控制回路不断校正输出的偏差,使系统的输出保持恒定。我们在生活中常见的恒温加热系统就是自动控制装置的一个范例,其利用温度传感器检测温度,将温度作为反馈量,利用加热元件提输出,当温度低
于设定值时,加热器启动,温度达到设定值时,加热器关闭,这样不就使温度始终保持恒定了吗。 B.闭环反馈控制 ● 对于舵机而言呢,位置检测器是它的输入传感器,舵机转动的位置一变,位置检测器的电阻值就会跟着变。通过控制电路读取该电阻值的大小,就能根据阻
LOGO 船舶搁浅事故应急预案
船舶搁浅是指船舶搁置在浅滩上,造成停航或损害。 一、险情特点 1、主要发生在枯水期浅险航段和洪水期中下游弯曲航段,枯水期发生率最高 2、搁浅船舶的损坏部位和损坏程序不易确定 二、可能引起的后果 1、在航道中搁浅,易造成水上阻航,甚至断航 2、搁浅常常会造成船体、螺旋桨、舵的损环 3、燃油或其它危险物质、污染物泄漏造成水域污染 4、受水位、潮流、风浪、河床底质等因素的影响,船舶可能断裂或倾覆 三、应急处置重点 1、核查船舶损害情况和搁浅程度,掌握、评估船舶的安全状态,并采取措施尽量保持船体平衡
2、综合考虑船舶、水文、气象和河床底质等因素,制定施救方案,并选择有利时机,组织力量迅速实施 3、做好相关防护措施,防止扩大损失或发生污染及其他事故 4、发生阻(断)航事件时,迅速采取交通管制措施,维护事发水域正常通航秩序 四、应急处置程序 (一)险情信息收集与处理 了解、遇险船舶的基本资料和遇险情况,包括但不限于: 1、船员人数、船舶装载情况(载客和载货情况)、是否有危险货物 2、搁浅原因、搁浅部位及船首向、搁浅前后的吃水变化、船舶触礁搁浅时的航速 3、搁浅水域河床底质及坡度,搁浅点至岸距离,船舶周围水深分布 4、事故发生地周围环境情况(水文、气象、航道、通航等)及对通航环境的影响程度 5、船舶有否发生大幅度的倾斜,船体有无随风浪摇摆和拍底或异常响动
6、船舶、机器、设施受损情况,排水能力及操纵能力受限的程度 7、已采取的措施及效果,正在采取和准备采取的措施 8、船长对险情(事故)的判断及救助要求 (二)现场处置措施 1、提醒船舶应采取的行动 (1)按《内河避碰规则》规定,悬挂船舶搁浅的号灯或号型,引起来往船舶的注意 (2)保护通讯联系,即时向海事部门通报船舶搁浅情况,稳定船员情绪 (3)检查搁浅部位及受损情况,若船舶进水应迅速组织力量进行堵漏排水 (4)测量各压载水舱、货舱、燃油舱和空舱等舱室的情况并详细做好记录,分析水线下船体受损情况 (5)测量船舶周围水深及吃水变化,掌握搁浅水域河床底质及坡度情况,收集近期天气、水位变化情况,评估险情的发展趋势 (6)分析船舶的强度及稳性,判断船舶是否有断裂或倾覆的可能
1、概述 舵机最早出现在航模运动中。在航空模型中,飞行机的飞行姿态是通过调节发动机和各个控制舵面来实现的。举个简单的四通飞机来说,飞机上有以下几个地方需要控制: 1) 发动机进气量,来控制发动机的拉力(或推力); 2) 副翼舵面(安装在飞机机翼后缘),用来控制飞机的横 滚运动; 3) 水平尾舵面,用来控制飞机的俯仰角; 4) 垂直尾舵面,用来控制飞机的偏航角; 不仅在航模飞机中,在其他的模型运动中都可以看到它的应用:船模上用来控制尾舵,车模中用来转向等等。由此可见,凡是需要操 作性动作时都可以用舵机来实现。 2、结构和控制 一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿轮组、位置反馈电位计5k、直流电机、控制电路板等。
工作原理:控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机的转动方向和速度,从而达到目标停止。 舵机的基本结构是这样,但实现起来有很多种。例如电机就有有刷和无刷之分,齿轮有塑料和金属之分,输出轴有滑动和滚动之分,壳体有塑料和铝合金之分,速度有快速和慢速之分,体积有大中小三种之分等等,组合不同,价格也千差万别。例如,其中小舵机一般称作微舵,同种材料的条件下是中型的一倍多,金属齿轮是塑料齿轮的一倍多。需要根据需要选用不同类型。 舵机的输入线共有三条,红色中间,是电源线,一边黑色的是地线,这辆根线给舵机提供最基本的能源保证,主要是电机的转动消耗。电源有两种规格,一是4.8V,一是6.0V,分别对应不同的转矩标准,即输出力矩不同,6.0V对应的要大一些,具体看应用条件;另外一根线是控制信号线,Futaba的一般为白色,JR的一般为桔黄色。另外要注意一点,SANWA的某些型号的舵机引线电源线在边上而
船舶丧失操纵能力应急预案 1船舶在航行中发生丧失操纵能力的紧急情况时,立即发出警报,召集应急,应立即采取滞航及就地抛锚(沿岸航行,水深适宜)等措施。 2在采取应急行动的同时迅速报告就近港口国主管机关或搜救中心 3 在进出港、狭水道航行时,立即使用伴航拖轮协助操纵。条件允许可向就近港口机关申请加派拖轮予以协助,使船舶抵安全水域抛锚。 4 船长和当值驾驶员应加强了望,以防本船失控后与他船发生紧迫局面,并按《国际信号规则》和《72海上避碰规则》《91内河避碰规则》的要求显示号灯、号型。 5船长应沉着指挥,当值驾驶员应使用VHF发布本船目前位置、动态,提醒来船注意,并做好各项记录。 6 轮机长指挥轮机员迅速进行故障设备抢修工作。 7 求得岸基支持,按公司相关处室或主管人员指示,采取进一步抢救和抢修措施。 8 船舶丧失操纵能力导致的碰撞、触礁、搁浅、燃油泄漏等事故,按相应应急预案进行部署 9 船舶发生丧失操纵能力时,按下列应急计划进行部署。 主机失灵、电力中断应急计划 职务负责部位应急/应变职责 船长驾驶台总指挥,发布船舶操纵命令,指挥船舶操纵,负责对外及与船公司联系。 项目负责人机舱副总指挥,协助船长组织、动员人员抢修故障设备及其他应急情况处理。值驾/二副驾驶台协助船长操纵船舶,守听VHF,核测船位,做好记录。。 值班水手驾驶台按舵令正确操舵。 驾助驾驶台协助了望,显示航行灯、信号灯,悬挂号型,传令,内部联络。 大副船首指挥甲板人员工作,备锚、备缆,系带拖轮,待命。 三副驾驶台甲板按船长指令准备消防器材,准备释放救生艇、筏。 水手长船首备锚、备缆,或按船长、大副指令进行准备。 轮机长机舱抢修现场的指挥。向船长报告故障,组织人力抢修,尽快排除故障。 大管轮机舱现场抢修。 二管轮机舱现场抢修,并负责发电机/应急发电机。 三管轮机舱现场抢修,并注意泵、阀情况。 电机员机舱负责电气设备的修理及发电机及应急照明。 机工长机舱协助大管轮工作或听从轮机长、大管轮指挥,完成指定工作。 值班机工机舱向轮机长、轮机员报告发现的故障情况,听从指挥。 其他机工机舱听从轮机长轮机员指挥,完成指定工作。 其他人员待命,做好援助准备。 操舵系统故障应急计划 职务负责部位应急任务 船长驾驶台总指挥,指挥船舶操纵,发布船舶相关命令,对外联系。 值驾驾驶台发出失控通报或警报,通知机舱变速航行,传达舵令至舵机间,核测船位。驾助驾驶台协助驾驶员工作,显示号灯、号型,传令,内部联络。 值班水手驾驶台悬挂信号,传令,内部联络。 下一班值驾舵机间携带VHF对讲机(或使用驾驶台/机舱直通电话)按驾驶台舵令指挥操
For personal use only in study and research; not for commercial use 船舶丧失操纵能力应急预案 1船舶在航行中发生丧失操纵能力的紧急情况时,立即发出警报,召集应急,应立即采取滞航及就地抛锚(沿岸航行,水深适宜)等措施。 2在采取应急行动的同时迅速报告就近港口国主管机关或搜救中心 3 在进出港、狭水道航行时,立即使用伴航拖轮协助操纵。条件允许可向就近港口机关申请加派拖轮予以协助,使船舶抵安全水域抛锚。 4 船长和当值驾驶员应加强了望,以防本船失控后与他船发生紧迫局面,并按《国际信号规则》和《72海上避碰规则》《91内河避碰规则》的要求显示号灯、号型。 5船长应沉着指挥,当值驾驶员应使用VHF发布本船目前位置、动态,提醒来船注意,并做好各项记录。 6 轮机长指挥轮机员迅速进行故障设备抢修工作。 7 求得岸基支持,按公司相关处室或主管人员指示,采取进一步抢救和抢修措施。 8 船舶丧失操纵能力导致的碰撞、触礁、搁浅、燃油泄漏等事故,按相应应急预案进行部署 9 船舶发生丧失操纵能力时,按下列应急计划进行部署。 主机失灵、电力中断应急计划 职务负责部位应急/应变职责 船长驾驶台总指挥,发布船舶操纵命令,指挥船舶操纵,负责对外及与船公司联系。 项目负责人机舱副总指挥,协助船长组织、动员人员抢修故障设备及其他应急情况处理。 值驾/二副驾驶台协助船长操纵船舶,守听VHF,核测船位,做好记录。。 值班水手驾驶台按舵令正确操舵。 驾助驾驶台协助了望,显示航行灯、信号灯,悬挂号型,传令,内部联络。 大副船首指挥甲板人员工作,备锚、备缆,系带拖轮,待命。 三副驾驶台甲板按船长指令准备消防器材,准备释放救生艇、筏。 水手长船首备锚、备缆,或按船长、大副指令进行准备。 轮机长机舱抢修现场的指挥。向船长报告故障,组织人力抢修,尽快排除故障。 大管轮机舱现场抢修。 二管轮机舱现场抢修,并负责发电机/应急发电机。 三管轮机舱现场抢修,并注意泵、阀情况。 电机员机舱负责电气设备的修理及发电机及应急照明。 机工长机舱协助大管轮工作或听从轮机长、大管轮指挥,完成指定工作。 值班机工机舱向轮机长、轮机员报告发现的故障情况,听从指挥。 其他机工机舱听从轮机长轮机员指挥,完成指定工作。 其他人员待命,做好援助准备。 操舵系统故障应急计划 职务负责部位应急任务
在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。 舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。舵机是一种俗称,其实是一种伺服马达。 其工作原理是: 控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。 3. 舵机的控制: 舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms 范围内的角度控制脉冲部分。以180度角度伺服为例,那么对应的控制关系是这样的: 0.5ms--------------0度; 1.0ms------------45度; 1.5ms------------90度; 2.0ms-----------135度; 2.5ms-----------180度; 这只是一种参考数值,具体的参数,请参见舵机的技术参数。 小型舵机的工作电压一般为4.8V或6V,转速也不是很快,一般为0.22/60度或0.18/60度,所以假如你更改角度控制脉冲的宽度太快时,舵机可能反应不过来。如果需要更快速的反应,就需要更高的转速了。 要精确的控制舵机,其实没有那么容易,很多舵机的位置等级有1024个,那么,如果舵机的有效角度范围为180度的话,其控制的角度精度是可以达到180/1024度约0.18度了,从时间上看其实要求的脉宽控制精度为2000/1024us约2us。如果你拿了个舵机,连控制精度为1度都达不到的话,而且还看到舵机在发抖。在这种情况下,只要舵机的电压没有抖动,那抖动的就是你的控制脉冲了。而这个脉冲为什么会抖动呢?当然和你选用的脉冲发生器有
船舶失控应急反应须知 1. 目的 旨在规范船舶失去自航动力处于漂航状态时所应采取的应急措施,防止事故恶化并争取尽早恢复正常状态。 2. 适用范围 适用于公司船舶失控漂流航行时的应急操作。 3. 职责 3.1值班驾驶员负责了望、通信联络和传令。 3.2 轮机长为现场指挥,并负责组织有关人员排除故障。 3.3船长为应急行动总指挥。 4. 定义 4.1 船舶失控系指船舶在航行中,因主推进系统故障、操舵系统故障、全船失电 等引起的船舶漂航情况。 4.1.1 主推进系统故障指船舶在航行时发生主机设备故障、螺旋桨脱落、传动系 统故障等引起的船舶漂航情况。 4.1.2 操舵系统故障是指船舶在航行操舵中发生失控的现象,如舵机失电、液压 泵故障、油缸泄漏、严重的滞舵、跑舵、冲舵现象、舵柄舵叶的故障等。 4.1.3 全船失电是指船舶在航行时,发生的因发电原动机故障、发电机故障、负载 过大跳闸、逆功率、配电板故障等原因引起的主供电源失电。 5. 应急行动 5.1主推进系统故障轮机部应急措施 5.1.1值班轮机员在发生主推进系统故障时,应立即向轮机长和驾驶台报告,并请 示要求停车修理;但在下列情况时,轮机员可先停车后报告: 1) 柴油机运转已危及人身安全时; 2) 滑油燃油管系破裂、大量油类外泄,造成严重污染并危及柴油机安全时; 3) 曲轴箱爆炸时; 4) 确认柴油机继续运转将引起重大事故时。 5.1.2 轮机长接到报告后,应迅速下机舱查明主机设备故障产生的原因,并判断 继续运行可能会产生的后果; 5.1.3 轮机长应把可能产生的后果告知船长,但必须无条件的执行船长的命令;
5.1.4 在得到船长允许停车修理后,轮机长作为现场指挥,应迅速组织轮机部成员 开展抢修工作,并安排专人与驾驶台的联系,必要时可要求甲板部成员配合到机舱抢险; 5.1.5 抢险结束后,应仔细检查系统情况,确信可运行后,重新启动主机继续航行, 并把详细经过写入《轮机日志》。 5.2主推进系统故障驾驶台应急措施 5.2.1船长应向轮机长询问故障的原因、可能引起的后果、抢修时间并结合当时的 海况/通航环境等迅速作出停车漂航的命令和组织船员的应急抢修工作; 5.2.2同时要利用一切有效手段控制船位、航速,避免发生其他险情和事故,如有 搁浅危险,利用余速及舵效,尽可能远离危险区,并做好抛锚或拖锚准备; 5.2.3 如主机失灵发生在狭水道或其他通航密集区有可能产生船舶碰撞危险时,船 长有权作出“舍机保船”的命令(按下驾控台“越控”按钮),但必须将这一动作在航海日志上作出记录; 5.2.4 应迅速把自动操舵改为手动操舵,并按船长的命令实施操作; 5.2.5 驾驶员应按船长的指示,通过望远镜、雷达等设备加强对船舶周围环境的观 察,并按《1972年国际海上避碰规则》和《中华人民共和国交通部沿海港口信号规定》的要求显示号灯或号型(白昼垂挂两黑球,夜晚垂直显示两红灯),用VHF频道告知来往船舶本船失控情况,以防与其他船舶发生紧迫局面。 5.3 操舵系统故障轮机部应急措施 5.3.1 值班轮机员在接到驾驶台的操舵故障后,应立即向轮机长报告并按驾驶台的 命令正确操纵主机(降速或停车); 5.3.2 轮机长获报后,应迅速到达舵机房,同轮机员一起查找系统故障的原因,并 按故障的原因制定相应的抢险措施; 5.3.3 轮机长应把故障的原因、目前的情况(有无能力修理)、修理可能需要的时 间向船长汇报; 5.3.4 在得到船长实施应急操舵的命令后,轮机长应带领相关人员立即启动应急舵 机或手操舵并与驾驶台保持联系,按驾驶台的命令操纵舵机。 5.4 操舵系统故障驾驶台应急措施 5.4.1 水手在操作舵机时,若发现舵机无法正常操作或有异常现象应立即向值班驾 驶员报告; 5.4.2 值班驾驶员应迅速查看操舵台的电源供应情况并作出最初的反应;
船舶紧急情况应急预案 本预案旨在保证船长和船员在船舶发生事故或紧急情况时做出有效反应,提供应急操作指南,最大限度地减少船舶紧急情况造成人员伤亡、环境污染和财产损失。 一、船上应急领导小组 组长:船长 副组长:轮机长 二、职责 1、船长:在船上事故和紧急情况中任全船总指挥,对处置紧急情况负全责,对船舶有控制权。并负责应急通信,保证船舶与外界通信畅通(包括了望、联络、发布指令和记录等)。 2、轮机长:在事故和紧急情况过程中任机舱总指挥,负责船舶所有机电设备的控制。 三、报告 1、船长组织船员施救的同时,及时报告公司和所辖区域的海事等管理机构,为了不耽误应急响应时机,最初报告的资料应至少应包括:船名、船位(港口/泊位);事故的性质(碰撞、搁浅、火灾、泄漏等);损害的性质和程序;涉及其他船舶的船名、船型、船籍和状况;要求协助的性质; 已经申请的服务;气候预报;其他有关的说明;报告日期和时间。 2、如果发生液货溢漏事故,应增加报告溢漏液货的种类;事故原因(如泄漏、爆裂、船体损 坏等);估计泄漏流率和泄漏量;是否已由船舶或第三方进行了清除工作。 3、船长或船长指定负责通信的人员应始终保持与公司联络畅通,直至船舶紧急情况解除。 四、船舶碰撞事故应急处置 1、立即检查本船有无人员伤亡。 2、检查了解碰撞部位损坏情况,是否处于危险状态,是否需要救助。 3、检查碰撞部位是否进水或溢漏液货,进水或溢漏液货程度。 4、如二船相碰,一船艏已嵌入另一船体内,特别是在水线以下时,应了解嵌入面积,损坏情 况,进水或溢漏程度等。 5、如发生人员伤亡应先行组织抢救。 6、如对方船被撞后处于危险状态,而本船并无严重危险,应使用本船救生设备尽快抢救对方 船上的人员。 专业资料
编号:AQ-BH-05125 ( 应急管理) 单位:_____________________ 审批:_____________________ 日期:_____________________ WORD文档/ A4打印/ 可编辑 搁浅紧急情况的应急预案 Emergency plan for grounding emergency
搁浅紧急情况的应急预案 备注:应急预案明确了应急救援的范围和体系,有利于做出及时的应急响应,当发生超过应急能力的重大事故时,便于与应急部门的协调,降低事故的危害程度。 1目的 规范船舶搁浅紧急情况的反应措施。 2适用范围 公司所属船舶。 3责任 3.1船长是船舶搁浅紧急情况应急反应的总指挥,负责发布命令。 3.2大副、轮机长分别是甲板部、轮机部的现场指挥,负责执行船长的命令。 3.3各职船员服从命令,听从指挥,投入应急反应。 4实施 4.1当船舶发生搁浅应立即发出紧急警报,如果发生溢油,还应参照《油污染紧急情况的反应措施》中6.1.1对应的措施。
4.2立即显示搁浅信号(日间:垂直悬挂三个黑球;夜间:显示锚灯和垂直两盏环照红灯)。 4.3迅速查明搁浅,查明船体破损情况、进水情况及污染情况以判断船舶危险程度,切忌盲目使用推进器和舵设备急于求得自力脱浅,以避免扩大损失。调查包括下列项目: 搁浅时间及搁浅船位; 船舶搁坐部位及船首向; 搁浅前的船舶吃水; 测量船体周围水深与底质; 当时气象,潮汐、流向与海况; 船体破损进水部位; 主机及推进器、舵设备及其他机械受损情况,或可能受到的危害情况; 排水泵浦及系统的可用情况; 污染情况; 主机、发电机海水冷却水进口阀改用高位的必要性、可能性。
舵机及转向控制原理 令狐采学 1、概述 2、舵机的组成 3、舵机工作原理 4、舵机选购 5、舵机使用中应注意的事项 6、辉盛S90舵机简介 7、如何利用程序实现转向 8、51单片机舵机测试程序 1、概述 舵机也叫伺服电机,最早用于船舶上实现其转向功能,由于可以通过程序连续控制其转角,因而被广泛应用智能小车以
实现转向以及机器人各类关节运动中,如图1、图2所示。 令狐采学创作 图1舵机用于机器人 图2舵机用于智能小车中 舵机是小车转向的控制机构,具有体积小、力矩大、外部机械设计简单、稳定性高等特点,无论是在硬件设计还是软件设计,舵机设计是小车控制部分重要的组成部分,图3为舵机的外形图。 图3舵机外形图 2、舵机的组成 一般来讲,舵机主要由以下几个部分组成,舵盘、减速齿 轮组、位置反馈电位计、直流电机、控制电路等,如图4、图5所示。 图4舵机的组成示意图 图5舵机组成
舵机的输入线共有三条,如图6所示,红色中间,是电源线,一边黑色的是地线,这辆根线给舵机提供最基本的能源保证,主要是电机的转动消耗。电源有两种规格,一是4.8V, —令狐采学创作是6.0V,分别对应不同的转矩标准,即输出力矩不 同,6.0V对应的要大一些,具体看应用条件;另外一根线是控制信号线,Futaba的一般为白色,JR的一般为桔黄色。另外要注意一点,SANWA的某些型号的舵机引线电源线在边上而不是中间,需要辨认。但记住红色为电源,黑色为地线,一般不会搞错。 图6舵机的输出线 3、舵机工作原理 控制电路板接受来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴和位置反馈电位计是相连的,舵盘转动的同时,带动位置反馈电位计,电位计将输出一个电压信号到控制电路板,进行反馈,然后控制电路板根据所在位置决定电机转动的方向和速度,从而达到目标停止。其工作流程为:控制信号一控制电路板―电机转动-齿轮组减速-舵盘转动?位置反馈电位计-控制电路板反馈。
船舶紧急情况应急预案 Company Document number:WTUT-WT88Y-W8BBGB-BWYTT-19998
船舶紧急情况应急预案 本预案旨在保证船长和船员在船舶发生事故或紧急情况时做出有效反应,提供应急操作指南,最大限度地减少船舶紧急情况造成人员伤亡、环境污染和财产损失。 一、船上应急领导小组 组长:船长 副组长:轮机长 二、职责 1、船长:在船上事故和紧急情况中任全船总指挥,对处置紧急情况负全责,对船舶有控制权。并负责应急通信,保证船舶与外界通信畅通(包括了望、联络、发布指令和记录等)。 2、轮机长:在事故和紧急情况过程中任机舱总指挥,负责船舶所有机电设备的控制。 三、报告 1、船长组织船员施救的同时,及时报告公司和所辖区域的海事等管理机构,为了不耽误应急响应时机,最初报告的资料应至少应包括:船名、船位(港口/泊位);事故的性质(碰撞、搁浅、火灾、泄漏等);损害的性质和程序;涉及其他船舶的船名、船型、船籍和状况;要求协助的性质;已经申请的服务;气候预报;其他有关的说明;报告日期和时间。 2、如果发生液货溢漏事故,应增加报告溢漏液货的种类;事故原因(如泄漏、爆裂、船体损坏等);估计泄漏流率和泄漏量;是否已由船舶或第三方进行了清除工作。 3、船长或船长指定负责通信的人员应始终保持与公司联络畅通,直至船舶紧急情况解除。 四、船舶碰撞事故应急处置 1、立即检查本船有无人员伤亡。 2、检查了解碰撞部位损坏情况,是否处于危险状态,是否需要救助。 3、检查碰撞部位是否进水或溢漏液货,进水或溢漏液货程度。
4、如二船相碰,一船艏已嵌入另一船体内,特别是在水线以下时,应了解嵌入面积,损坏情况,进水或溢漏程度等。 5、如发生人员伤亡应先行组织抢救。 6、如对方船被撞后处于危险状态,而本船并无严重危险,应使用本船救生设备尽快抢救对方船上的人员。 7、如船艏嵌入另一船体时,是否立即倒车脱离应视情而定,如倒车可能招至另一船沉没,不倒车对我船无严重威胁时,则暂不倒车,应等对方做好堵漏准备工作且同意倒车时,方可退出。 8、为减少冲力,不使碰撞部位扩大,可适当使用倒车。当仅有很小冲力时,撞入船应停车改用微速前进,利用船艏塞住破洞,减少进水量,为被撞入船争取时间防水堵漏。为防止船艏滑出,可以系带缆绳。如附近有浅滩,在被撞入船同意下,可将其推向浅滩座浅。如二船决定脱离,条件许可时,还应协助被撞入船将破洞置于下风,减少进水或溢漏液货,以利抢救。 9、如不倒车可能招至二船都要沉没时,则撞入船适时倒出。 10、被撞后,如进水或溢漏液货严重,应立即选择安全合适的沙质浅滩,进行抢滩。如附近无沙滩时,亦可抢座硬质浅滩。 11、当船舶受损严重处于沉没、倾覆、爆炸等严重危险时,经抢救确属无效,为保证人员生命安全,船长有权从其专业判断采取必要的措施,下达弃船命令。如情况允许,船长必须将弃船情况和理由电告公司。 五、船舶搁浅事故应急处置 1、如在感潮河段,可采取紧急抛锚,固定船位,以利高潮时起浮。 2、如动车脱浅,应注意记录使用主机情况、推进器尾轴、推力轴承等异常情况及损坏情况。 3、吊拖船队发生搁浅、触礁不能行动时则应立即解队,将未搁浅的驳船拖往附近安全地带锚泊。 4、在对搁浅、触礁船舶施救时,缆绳以软缆为宜,用丙稀或尼龙太平缆绳拖带,长短适宜。松、收缆时应防止绞缠推进器。松缆绳时要理清拖缆,缆绳系好后,所有人员必须离开缆绳附近,用车时切忌猛增车速,防止崩断拖缆,脱浅时注意搁浅船的冲势,避免碰撞。
舵机控制板使用说明V1.2 产品特点 ●采用32位ARM 内核的处理器芯片 ●独创的在线升级机制,用户可以在线升级固件 ●自动识别波特率 ●采用USB和UART通讯接口 ●1us的控制精度(相当于舵机的0.09度) ●可以同时同步控制32个舵机(24路舵机控制板可以同时同步控制24个,16路舵机控制板可以同时 同步控制16个舵机) ●内置512K 存储芯片,可存储上百个动作组 ●功能强大的电脑软件(内置3种语言,简体中文、繁体中文、英语) ●拥有Android手机控制软件 供电 舵机控制板需要2个电源: 舵机电源和芯片电源 舵机电源(正极):VS(图中3号位置的蓝色接线端子的左端) 舵机电源(负极):GND(图中3号位置的蓝色接线端子的中间) 舵机电源的参数根据实际所接舵机的参数而定,如TR213舵机的供电电压是4.8-7.2V,那么舵机电源就可以用电压在4.8-7.2V之间的电源。 芯片电源(正极):VSS(图中3号位置的蓝色接线端子的右端)
芯片电源(负极):GND(图中3号位置的蓝色接线端子的中间) VSS的要求是6.5-12V,如果芯片供电是从VSS端口输入的,那么电源的电压必须是6.5-12V之间。 另外: 1. 图中2号位置的USB接口可以给芯片供电,所以USB接口和VSS端口,任选其一即可。 2. 图中1号位置也可以给芯片供电,标记为5V和GND,5V是正极,GND是负极,供电电源的电压必 须是5V。 3. 图中1、2、3号位置都可以给芯片供电,任选其一即可。 4. 图中4号位置的绿色LED灯是芯片电源正常的指示灯,绿色灯亮,表示芯片供电正常,绿色灯灭,表 示芯片供电异常。 5. 图中5号位置的绿色LED灯是舵机电源正常的指示灯,绿色灯亮,表示舵机供电正常,绿色灯灭,表 示舵机供电异常。 如果需要控制舵机,2个绿色的LED灯都亮是前提条件。
目录 1 目的 4 参照文件 2 适用范围 5 应急措施 3 定义 6 记录 7 相关文件 修改记录
1.目的 本文件制定了船舶航行中主机失灵时应采取的措施,旨在加强船员的应急能力,避免因主机故障而造成事故。 2.适用范围 进入安全管理体系的船舶/部门和人员。 3.定义 主机失灵:是指船舶航行中主机发生的会影响安全航行的严重故障(诸如柴油机飞车、主机拉缸、柴油机调速器故障、主机曲轴烧损、主机推力轴承烧损等)。 4.参照文件 《国内安全管理规则》、《安全管理手册》、《紧急情况的标明、阐述和反应程序》 5.应急措施 5.1 驾驶部 5.1.1 值班驾驶员获悉主机失灵后应立即报告船长,发出警报(打警铃一长声)。若船舶因此失去控制,应按章鸣放声号(一长声),显示信号(夜间除显示舷灯和尾灯外,还应当显示红光环照灯两盏,白天悬挂圆球两个),及时用无线电话通知过往船舶注意。 5.1.2全体船员听到警报后,应迅速到达各自岗位,听候命令。 5.1.3 充分利用舵效借助余速控制航向,迅速采取一切有效措施锚泊,必要时出缆系靠。 5.1.4 停泊后通知机舱尽力抢修恢复。 5.1.5 船舶航经大桥、船闸、浅险狭窄航道,主机失灵而有碰撞、触礁、搁浅等危险时,应及时、果断采取有效措施,避免事故的发生。 5.2 轮机部(几种常见主机故障应急措施) 5.2.1 柴油机油压下降后的检查处理 5.2.1.1 机油压力刚降到报警压力就及时发现,应立即启动备用油泵维持正常油压到锚地或港口,检查失压原因,予以排除。 5.2.1.2 机油压力失压或陡降,首先应立即停车、转车,并报告驾驶室,20分钟后用手探摸曲轴箱体和道门温度,温度降到65度以下后方可撤开道门,检查损坏情况。 5.2.1.3 就近选择安全锚地或用无故障主机维持航行到锚泊点或港口,全面检查设备损坏情况,找出事故原因,经修理故障排除后,才能动车。损坏情况不明或原因未查明,严禁盲目航行。 5.2.1.4经修复决定开航后,值班人员应密切注意主机机油压力有无变化,柴油机经低速,低负荷运转一段时间,确定一切正常后,再逐步提高转速,增加柴油机负荷。 5.2.1.5经一段时间运转后,应利用停泊时间,对损坏修复件进行检查。 5.2.2 柴油机拉缸的处理
. . . z 船舶紧急情况应急预案 本预案旨在保证船长和船员在船舶发生事故或紧急情况时做出有效反应,提供应急操作指南,最大限度地减少船舶紧急情况造成人员伤亡、环境污染和财产损失。 一、船上应急领导小组 组长:船长 副组长:轮机长 二、职责 1、船长:在船上事故和紧急情况中任全船总指挥,对处置紧急情况负全责,对船舶有控制权。 并负责应急通信,保证船舶与外界通信畅通(包括了望、联络、发布指令和记录等)。 2、轮机长:在事故和紧急情况过程中任机舱总指挥,负责船舶所有机电设备的控制。 三、报告 1、船长组织船员施救的同时,及时报告公司和所辖区域的海事等管理机构,为了不耽误应急响应时机,最初报告的资料应至少应包括:船名、船位(港口/泊位);事故的性质(碰撞、搁浅、火灾、泄漏等);损害的性质和程序;涉及其他船舶的船名、船型、船籍和状况;要求协助的性质; 已经申请的服务;气候预报;其他有关的说明;报告日期和时间。 2、如果发生液货溢漏事故,应增加报告溢漏液货的种类;事故原因(如泄漏、爆裂、船体损 坏等);估计泄漏流率和泄漏量;是否已由船舶或第三进行了清除工作。 3、船长或船长指定负责通信的人员应始终保持与公司联络畅通,直至船舶紧急情况解除。 四、船舶碰撞事故应急处置 1、立即检查本船有无人员伤亡。 2、检查了解碰撞部位损坏情况,是否处于危险状态,是否需要救助。 3、检查碰撞部位是否进水或溢漏液货,进水或溢漏液货程度。 4、如二船相碰,一船艏已嵌入另一船体,特别是在水线以下时,应了解嵌入面积,损坏情况, 进水或溢漏程度等。 5、如发生人员伤亡应先行组织抢救。 6、如对船被撞后处于危险状态,而本船并无重危险,应使用本船救生设备尽快抢救对船上的 人员。 7、如船艏嵌入另一船体时,是否立即倒车脱离应视情而定,如倒车可能招至另一船沉没,不 倒车对我船无重威胁时,则暂不倒车,应等对做好堵漏准备工作且同意倒车时,可退出。
精心整理 船舶紧急情况应急预案 本预案旨在保证船长和船员在船舶发生事故或紧急情况时做出有效反应,提供应急操作指南,最大限度地减少船舶紧急情况造成人员伤亡、环境污染和财产损失。 一、船上应急领导小组 组长:船长 1 2 1 火灾、 2 3 1 2 3 4、如二船相碰,一船艏已嵌入另一船体内,特别是在水线以下时,应了解嵌入面积,损坏情况,进水或溢漏程度等。 5、如发生人员伤亡应先行组织抢救。 6、如对方船被撞后处于危险状态,而本船并无严重危险,应使用本船救生设备尽快抢救对方船上的人员。 7、如船艏嵌入另一船体时,是否立即倒车脱离应视情而定,如倒车可能招至另一船沉没,不倒车对我船无严重威胁时,则暂不倒车,应等对方做好堵漏准备工作且同意倒车时,方可退出。
8、为减少冲力,不使碰撞部位扩大,可适当使用倒车。当仅有很小冲力时,撞入船应停车改用微速前进,利用船艏塞住破洞,减少进水量,为被撞入船争取时间防水堵漏。为防止船艏滑出,可以系带缆绳。如附近有浅滩,在被撞入船同意下,可将其推向浅滩座浅。如二船决定脱离,条件许可时,还应协助被撞入船将破洞置于下风,减少进水或溢漏液货,以利抢救。 9、如不倒车可能招至二船都要沉没时,则撞入船适时倒出。 10、被撞后,如进水或溢漏液货严重,应立即选择安全合适的沙质浅滩,进行抢滩。如附近无沙滩时,亦可抢座硬质浅滩。 11、当船舶受损严重处于沉没、倾覆、爆炸等严重危险时,经抢救确属无效,为保证人员生命 1 2 3 泊。 4 5 6 7 8 9 设备运转,以利船舶施救。 六、船舶横倾应急处置 1、停止有关作业; 2、发出应急警报,集合全体船员; 3、如船舶在长江、湖泊中航行,应调整航向和航速,使船舶顶风航行,尽量减少横摇角度; 4、如船舶在运河中航行,应根据船舶横倾的危险程度,采取抢滩等有效措施,以利于下一步的应急处置;
1 2 3 4 5 6 A B C D 6 54321D C B A Titl e Number Revision Size B Date:28-Jan-2010Sheet of File: D:\STM 32多功能多路舵机控制板\STM 32多功能多路舵机控制板PR OTEL\STM 32舵机控制板.Ddb Drawn B y :BOOT060NR ST 7 OS C_IN/PD0 5 OS C_OUT/PD1 6 PA0-WKUP 14 PA115PA216PA317PA420PA521PA622PA7 23PA841 PA942PA1043PA1144PA12 45 PA13/JTMS/S WDIO 46PA14/JTCK/S WCLK 49PA15/JTDI 50 PB 026PB 1 27 PB 2/BOOT128PB 3/JTDO 55PB 4/JNTRST 56PB 557PB 658PB 7 59PB 861PB 962PB 1029PB 1130PB 1233PB 1334PB 1435PB 1536PC 08PC 19PC 210PC 311PC 424PC 525PC 637PC 7 38PC 839PC 940PC 1051PC 1152PC 12 53PC 13-TAMPER-RTC 2PC 14-OS C32_IN 3PC 15-OS C32_OUT 4PD254VB AT 1VDD_132VDD_248VDD_364VDD_419VDDA 13 VS S_131VS S_247VS S_363VS S_418VS SA 12 U1 STM 32F 103RB T6 CD/DAT3 1CM D 2VS S 3VDD 4CLK 5VS S 6DAT07DAT18DAT2 9 JP7 SD 卡座 A 1 1A 2A 23 B 16B 5B 2 4 JP11KEY C1+ 1 V+2C1-3C2+4 C2-5 V-6 T2out 7 R2i n 8VC C 16 GND 15T1out 14R1i n 13R1out 12T1i n 11T2i n 10R2out 9 JP13MAX232 1 62738495J7 DB 9 Y18M HZ C3 20p C4 20p OS C_IN OS C_OUT US ART1_TX US ART1_RX C9 0.1uf C110.1uf C100.1uf C80.1uf C12 0.1uf 1 234J5CON4 1234J6CON4 1 234J4CON4 1234567 8 JP4HEADER 4X2 1234567 8 JP6HEADER 4X2 1234567 8 JP3HEADER 4X2 1234567 8 JP1 HEADER 4X2 1234567 8 JP2 HEADER 4X2 1234567 8 JP5 HEADER 4X2 1234J1CON4 1234J2CON4 1234J3CON4 vcc VC C VC C VC C VC C VC C 5V VC C02VC C11 GND04NTRST 3GND16TDI 5GND28TM S 7GND310TC K 9GND412RTCK 11GND514TDO 13GND616NR ST 15GND718NC 017GND820 NC 1 19 JP8JTAG 3V3 JTR ST JTDO JTR ST JTDO R1310k C5 100nf 3V3 S1 SW-PB SPI1_NS S SPI1_SC K SPI1_MISO SPI1_MOSI SPI1_NS S R3 100R1100R2 100 SPI1_MOSI SPI1_SC K SPI1_MISO C2100nf 3V3 3V3 C1100nf OS C_IN OS C_OUT US ART1_TX US ART1_RX 12345 6 JP12 HEADER 3X2 3V3R1210K R1110K BOOT1 BOOT0 BOOT0 BOOT11234 8765S2SW DIP-4 3V3 R710K R810K R910K R1010K PA0PA1PA2PA3 PA0PA1PA2PA33V3 C610p C710p US B_DM US B_DP US B_DISCONNEC T PC 0PC 1PC 2PC 3 PC 7PC 6PC 4PC 5 PC 8PC 9PC 10PC 11 PC 12PB 5PB 6PB 7PB 8 PB 11PB 10PB 9PB 12 PB 13PB 14PB 15 PB 5PB 6PB 7PB 8PB 9PB 10PB 11PB 12PB 13PB 14PB 15PC 0PC 1PC 2PC 3PC 4PC 5PC 6PC 7PC 8PC 9PC 10PC 11PC 12 VUSB 1GND 5 ID 4D+3D-2C24 MINI_USB 5V R422 R522R61.5k US B_DM US B_DP US B_DISCONNEC T Y2 32.768KHZ R15 1k 5V 2 3 1 R16 POWER 5V 1 2JP10 HEADER 212JP9 HEADER 2 VC C 3V3 C13100nf C1410uf C15 100nf C1647u f C17 100n f C184.7u f C19100n f C20100n f C21100n f C22100n f C23 100n f R141K +C251000u f Vin 3 G N D 1 Vout 2U2 VOLTREG Vin 3 G N D 1 Vout 2 U3 VOLTREG D2 LED D1LED