
模拟题一
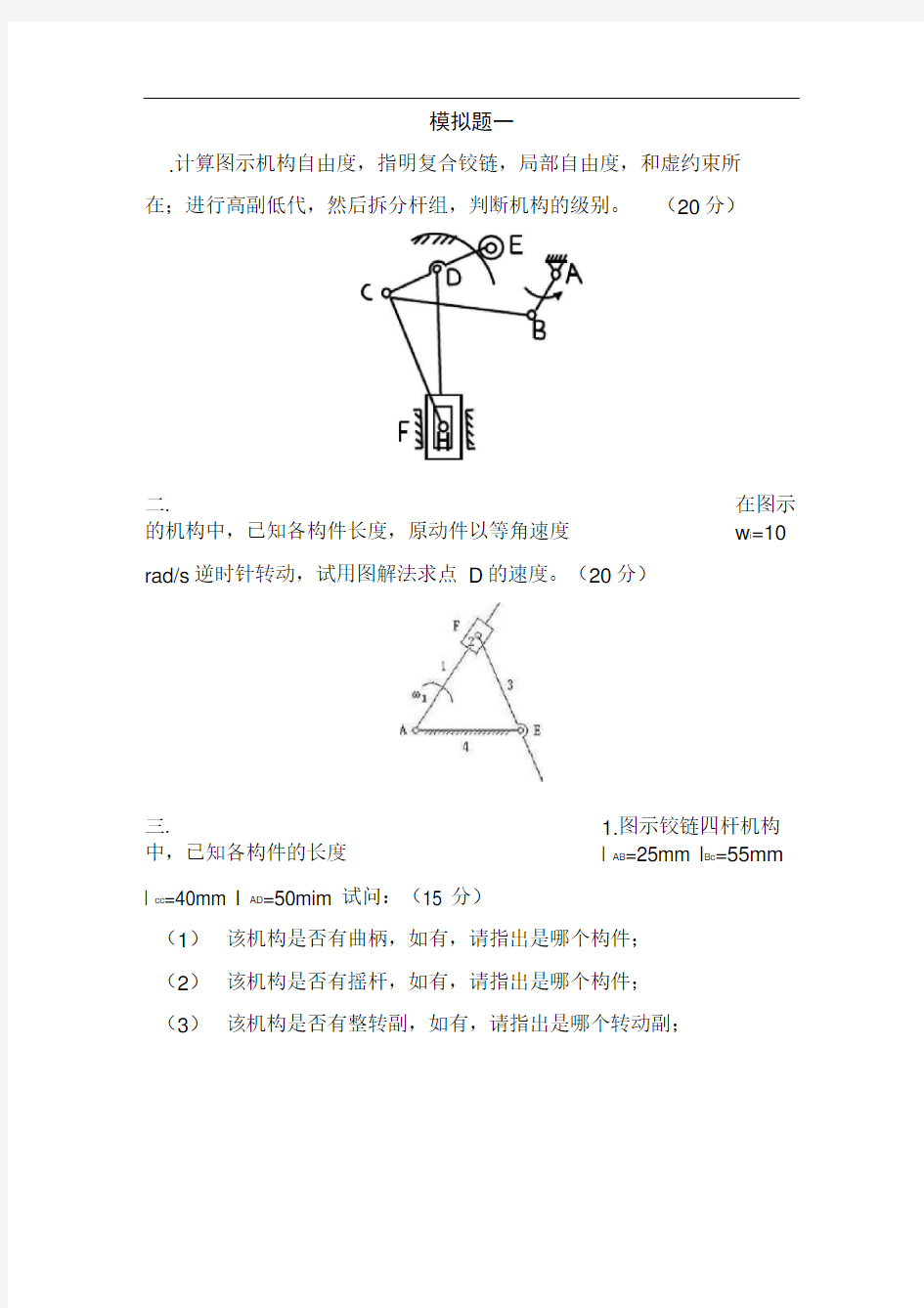
.计算图示机构自由度,指明复合铰链,局部自由度,和虚约束所
在;进行高副低代,然后拆分杆组,判断机构的级别。(20分)
二. 在图示的机构中,已知各构件长度,原动件以等角速度w i=10
rad/s逆时针转动,试用图解法求点D的速度。(20分)
三. 1.图示铰链四杆机构中,已知各构件的长度I AB=25mm l Bc=55mm
l cc=40mm I AD=50mim 试问:(15 分)
(1)该机构是否有曲柄,如有,请指出是哪个构件;
(2)该机构是否有摇杆,如有,请指出是哪个构件;
(3)该机构是否有整转副,如有,请指出是哪个转动副;
2.设计一铰链四杆机构,如图所示,已知行程速比系数K=1,机架长
L AD=100mm曲柄长L AB=20mm当曲柄与连杆共线,摇杆处于最远的极限位置时,曲柄与机架的夹角为30° ,确定摇杆及连杆的长度。(20分)
四. 图示机构的凸轮轮廓线由两段直线和两段圆弧组成。(1)画出偏距圆;(2)画出理论廓线;(3)画出基圆;(4)画出当前位置的从动件位移s;(5)画出当前位置的凸轮机构压力角;(6)画出从动件升程h。(7)凸轮的推程角?,近休止角? s',回程角? ' (20分)
五. 一对正常齿制标准安装的外啮合标准直齿圆柱齿轮传动,已知传
动比i=2.5,中心距a=175mm小齿轮齿数z仁20,压力角a =20°
试计算模数m大齿轮的几何尺寸基圆直径,齿顶圆直径和齿根圆直径。(20分)
六
. 图示轮系各轮的齿数已在括号中标注,已知主动轮1的转速为每
分钟1转、主动轮4的转速为每分钟2转,转向如图所示。试求输出构件H的转速和转向。(20分)
七. 图示减速器,已知传动比i=Z2/z i=3,作用在大齿轮上的阻力矩随大齿轮的转角? 2变化,其变化规律为:当0<=? 2<=120°时,阻力矩为
M=300N? m 当120° <=? 2<=360°时,阻力矩为M=0,又已知小齿轮的转动惯量为J i,大齿轮的转动惯量为J2。假设作用在小齿轮上的驱动力矩M为常数,小齿轮为等效构件。试求等效转动惯量J
等效驱动力矩M,等效阻力矩M。(15分)
W2 —f
模拟题二
一. 平面机构的机构分析(20分)
1. 计算图示系统自由度,并指明虚约束、复合铰链、局部自由度
(8 分)
R IWI
2. 以AB为原动件对图示机构进行结构分析,要求画出原动件、基本组,并指出机构的级别。(8 分)
3.试对图示机构进行高副低代,要求画出替代机构。(4分)
.平面机构的运动分析
图所示连杆机构中给定各构件长度和w =常数,试用相对运动图解法
求杆5的角速度W5,写出求解的速度矢量方程,作出速度多边形(20
分)
三. 平面连杆机构及其设计(35 分)
1. 如图所示,设已知四杆机构各构件的长度a =240 mm;b =600 mm;
c =400 mm; d=500mm试回答下列问题:(15分)
⑴当取杆 4 为机架时,是否有曲柄存在?
⑵若各杆长度不变,能否以选不同杆为机架的办法获得双曲柄机构和双摇杆机构?如何获得?
2.已知曲柄摇杆机构的行程速比系数K=1.4、摇杆长度c=600mm摇杆最大输出摆角? =30°,机架长度d=300mm试用图解法设计该机构。要求自选比例尺画出设计图(不得书写作图过程),写出极位夹角,曲柄长度 a 和连杆长度 b 的计算式和计算结果。(20 分)
四. 凸轮机构及其设计(20分)
图示凸轮机构的凸轮为圆盘。试画出理论廓线、基圆、偏距圆、
件升程h、凸轮从当前位置逆时针转过120°时的机构压力角动件位移s
五. 齿轮机构(20分)
一对渐开线外啮合正常齿标准直齿圆柱齿轮传动,已知模数压力角a =20°,齿数Z i=20, Z2=60,试求:
(1) 两个齿轮的分度圆直径d i, d2和齿顶圆直径d al, d a2
(2) 标准中心距a;
(3) 齿轮的基圆齿距p b;
(4) 重合度为多少;
(订=二[巧(也7-亡翊口 ) + z2^ana a2_ tana )])
(5) 实际中心距a =163mn时的啮合角a 从动
a和从m=4mm
六. 轮系(20分)
图示轮系,已知:z i=20, Z3=80, Z4=Z5=30, Z6=90。求Z2和i 花。
七. 机械动力学(15分)
如图所示,小带轮1通过皮带2驱动大带轮3,与大带轮3固联的小齿轮3’驱动大齿轮4。已知小带轮直径d i、大带轮直径d3、各齿轮的齿数
为Z3’、Z4、各构件绕其转动轴的转动惯量为J i、J3、J4 (忽略皮带的质量)、作用在构件4的生产阻力矩为M。试求以构件1为等效构件的等效转动惯量和等效阻力矩。