全桥驱动器UBA2030T及其应用
1前言
飞利浦公司利用“BCD750功率逻辑工艺方法”制造的UBA2030T,是为驱动全桥拓扑结构中的功率MOSFET而专门设计的高压IC。UBA2030T只需用很少量的外部元件,即可组成高强度放电(HID)灯电子镇流器电路,并且为HID灯驱动电路的设计提供了解决方案。
2封装、内部结构及引脚功能
UBA2030T采用24脚SO封装,顶视图如图1所示。
UBA2030T芯片集成了自举二极管、振荡器、高压和低压电平移相器、高端(左、右)和低端(左、右)驱动器及控制逻辑等电路,其内部结构框图如图2所示。
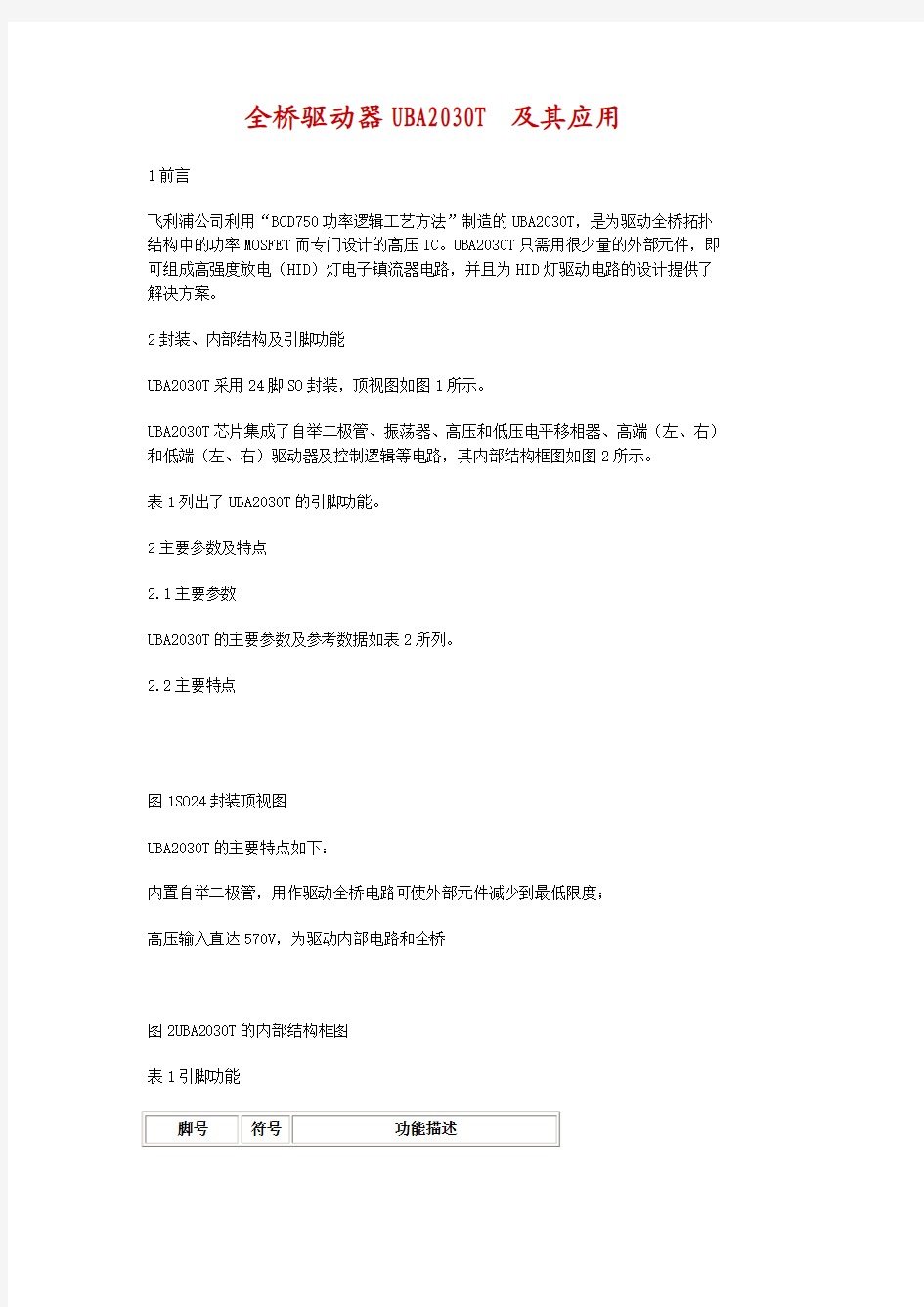
表1列出了UBA2030T的引脚功能。
2主要参数及特点
2.1主要参数
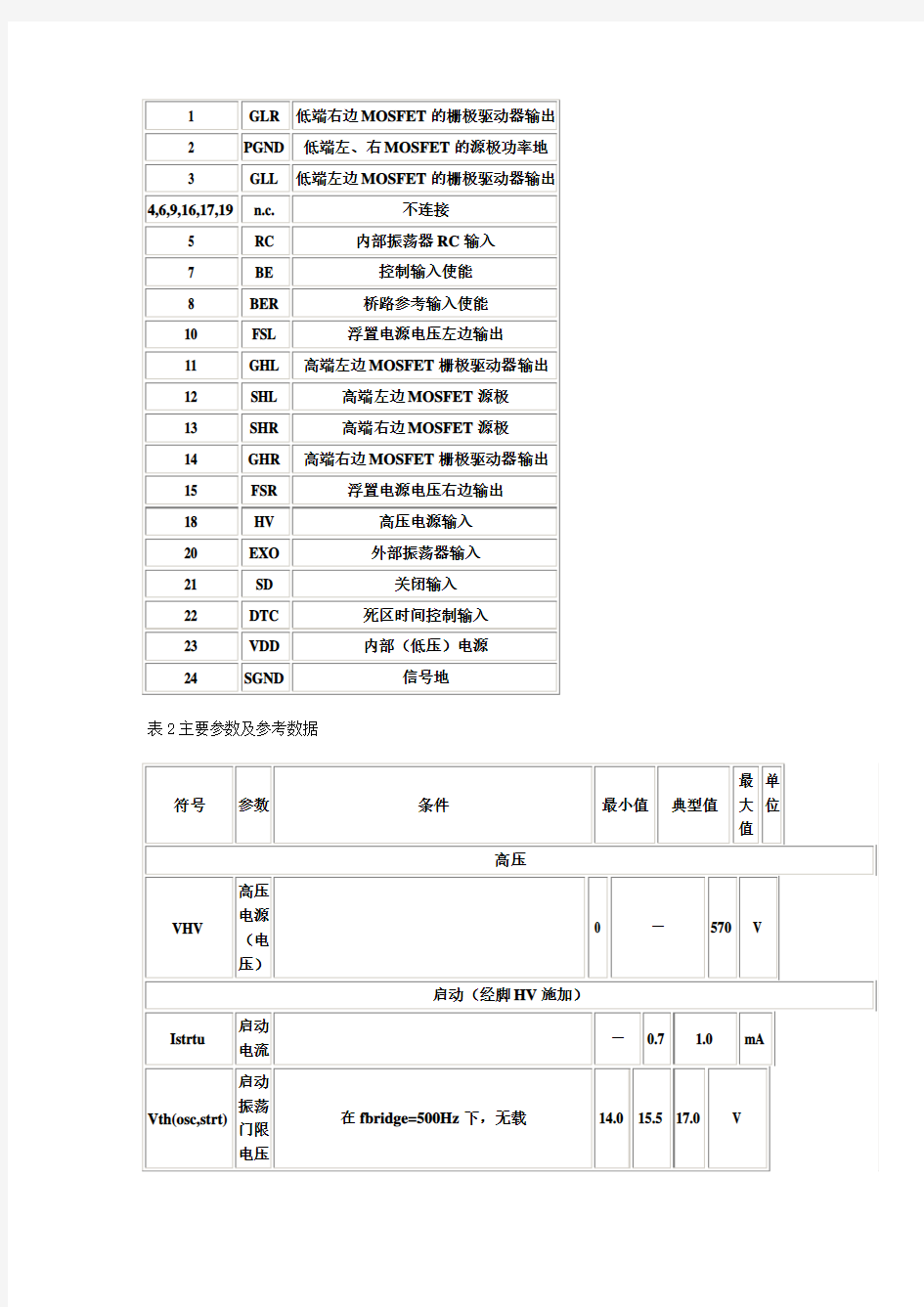
UBA2030T的主要参数及参考数据如表2所列。
2.2主要特点
图1SO24封装顶视图
UBA2030T的主要特点如下:
内置自举二极管,用作驱动全桥电路可使外部元件减少到最低限度;
高压输入直达570V,为驱动内部电路和全桥
图2UBA2030T的内部结构框图
表1引脚功能
表2主要参数及参考数据
VDD范围:0V~18V
中的MOSFET,IC提供自己产生的低电源电压;
利用在DTC脚和SGND脚之间连接的电阻器RDT来设定死区时间tdead,并且
RDT=270tdead-70,RDT(min)=50kΩ,RDT(max)=1MΩ(RDT的单位为kΩ时,tdead的单位为μs);
振荡器频率可调,当使用内部振荡器时,桥路(bridge)频率可利用外部电阻器ROSC 和电容器COSC设定:fbridge=1/(2×8×ROSC×COSC),并要求ROSC=200kΩ~2MΩ;
内置PMOS高压移相器,以控制桥路使能功能;
具有关闭功能,只要在SD脚上的输入达到4.5V,全桥中的4只MOSFET则被关断。
3应用介绍
UBA2030T典型应用主要是在高压的(HPS)灯和金属卤灯这类HID灯电子镇流器电路中作为全桥驱动器。
3.1基本应用电路
用UBA2030T作驱动器和HID灯为负载的全桥基本拓扑结构如图3所示。在这个应用电路中,
图6用低压DC电源为内部电路
提供电流的HID灯全桥驱动器电路
BER脚、BE脚、EXO脚和SD脚都接系统地,没有使用桥路使能和关闭功能。当使用内部振荡器时,桥路换向频率由ROSC和COSC的取值决定。当HV施加电压超过振荡触发门限(典型值是15.5V)时,振荡器开始振荡。如果在HV脚上的电压降至振荡器停止门限(典型值是13V)电压,IC将重新进入启动状态。
一旦IC开始正常工作,在功率开关HL(Q1)和LR(Q4)导通时,HR(Q3)和LL(Q2)则截止;当HR(Q3)和LL(Q2)导通时,HL(Q1)和LR(Q4)则截止。UBA2030T提供的换向逻辑,保证了在HID灯中能产生交变电流。
HID灯的启动需要施加一个3kV~10kV的高压脉冲。由带负阻特性的触发元件、电容器和升压线圈等组成的点火器电路,在通电之后能产生足够使HID灯击穿的高电压,使灯引燃。为防止HID灯出现“声共振”现象,导致电弧不稳,烧坏灯管,对于HID灯驱动电路,往往还要采取“声共振”抑制措施。
3.2带外部振荡器控制的应用电路
图4示出的是带外部振荡器控制电路的HID灯全桥拓扑结构。在该应用电路中,
UBA2030T的RC脚、BER脚和BE脚连接系统地,桥路换向频率由外部振荡器决定,关闭输入脚(SD脚)可以用作关断全桥电路中的全部MOSFET。
3.3控制电路以桥路高端作参考的HID灯全桥驱动器电路
UBA2030T在驱动HID灯全桥系统中作为换向器元件使用。HID灯的使用寿命依赖于通过石英壁的钠迁移量。为使钠迁移比率减至最小,HID灯以系统地为参考时,必须在负压下工作。图5示出的是控制单元以桥路高端作参考的HID灯全桥驱动器电路。在该应用电路中,BER脚和HV脚都连接到系统地。
图6所示的以桥路高端作为参考的又一种HID灯全桥驱动电路。BER脚连接系统地,通过HV脚流入IC内部低压电路的电流可以由低压DC电源(如电池)提供,如图6
中虚线所示。RDT的数值在50kΩ与1000kΩ之间。当RDT=220KΩ时,死区时间tdead 是1μs.
在任何应用中,在IC脚HV上的电压不能低于在VDD脚上的电压。否则,不论是在启动状态还是进入正常工作期间,全桥都不会正确工作。在启动阶段,IC的EXO脚和SD脚都应处于低电平。在EXO脚和SD脚的电压为时间函数时,其变化速率应大于
5V/ms。
惠斯通电桥 在实验中,测量电阻的常见方法有伏安法和电桥法。伏安法测量电阻的公式为R=U/I (测量的电阻两端电压/测量的流经电阻的电流),除了电流表和电压表本身的精度外, 还有电表本身的电阻,不论电表是内接或外接都无法同时测出流经电阻的电流 I 和电阻 两端的电压U ,不可避免存在测量线路缺陷。电桥是用比较法测量电阻的仪器。电桥的 特点是灵敏、准确、使用方便,它被广泛地应用于现代工业自动控制电气技术、非电量 转化为电学量测量中。电桥可分为直流电桥、交流电桥,直流电桥可以用于测电阻,交 流电桥可用于测电容、电感。通过传感器可以将压力、温度等非电学量转化为传感器阻 抗的变化进行测量。 惠斯通电桥属于直流电桥,主要用于测量中等数值的电阻(101 ~106 Q )O 对于太小 的电阻 (10"6 ~101 Q 量级),要考虑接触电阻、导线电阻,可考虑使用双臂电桥;对于大 电阻(107Q 级),要考虑使用冲击检流计等方法。惠斯通电桥使用检流计作为指零仪表, 而实验室用检流计属于 1惠斯通电桥测量原理 图1是惠斯通电桥的原理图。四个电阻 R o 、R i 、R 2、 R x 连成四边形,称为电桥的四个臂。四边形的一个对角线 连有检流计,称为“桥”;四边形的另一对角线接上电源, 称为电桥的“电源对角线” 。E 为线路中供电电源,学生 实验用双路直流稳压电源,电压可在 0-30V 之间调节。R 保护为较大的可变电阻,在电桥不平衡时取最大电阻作限流 作用以保护检流计;当电桥接近平衡时取最小值以提高检 流计的灵敏度。限流电阻用于限制电流的大小,主要目的 在于保护检流计和改变电桥灵敏度。 电源接通时,电桥线路中各支路均有电流通过。当C 、D 两点之间的电位不相等时, 桥路中的电流I g -0,检流计的指针发生偏转;当 C 、D 两点之间的电位相等时,桥路 中的电流I g =0,检流计指针指零(检流计的零点在刻度盘的中间),这时我们称电桥 处于平衡状态。因此电桥处于平衡状态时有: I g =0 U AC =U AD 于是空二邑即R x R 2二R 0R 1 R 0 R 2 此式说明,电桥平衡时,电桥相对臂电阻的乘积相等。这就是电桥的平衡条件。 根据电桥的平衡条件,若已知其中三个臂的电阻,就可以计算出另一个桥臂电阻, 因此,电桥测电阻的计算式为 R x 二邑凤二 KR 。 (1) R 2 电阻R 1、R 2为电桥的比率臂,R x 为待测臂,R 为比较臂,R 。作为比较的标准,实 A 表,电桥的灵敏度要受检流计的限制。 [1 U CB = U DB 1 Rx = 1 R0 I R1 = I R2 1 Rx R x = 1 R1 R 1 1 R0R 0 = 1 R2 R 2
非平衡直流电桥的原理和应用
非平衡直流电桥的原理和应用 直流电桥是一种精密的电阻测量仪器,具有重要的应用价值。按电桥的测量方式可分为平衡电桥和非平衡电桥。平衡电桥是把待测电阻与标 准电阻进行比较,通过调节电桥平衡,从而测得待测电阻值,如单臂直流电桥(惠斯登电桥)、双臂直流电桥(开尔文电桥)。它们只能用于测量具有相对稳定状态的物理量,而在实际工程中和科学实验中,很多物理量是连续变化的,只能采用非平衡电桥才能测量;非平衡电桥的基本原理是通过桥式电路来测量电阻,根据电桥输出的不平衡电压,再进行运算处理,从而得到引起电阻变化的其它物理量,如温度、压力、形变等。【实验目的】 本实验采用FQJ型教学用非平衡直流电桥,该仪器集单臂、非平衡电桥于一体,通过本实验能掌握以下内容: 1.直流单臂电桥(惠斯登电桥)测量电阻的基本原理和操作方法; 2.非平衡直流电桥电压输出方法测量电阻的基本原理和操作方法; 3.根据不同待测电阻选择不同桥式和桥臂电阻的初步方法及非平衡电桥功率输出法测电阻; 4.单臂电桥采用“三端”法测量电阻的意义。 【实验仪器】 1. FQJ型教学用非平衡直流电桥; 2. FQJ非平衡电桥加热实验装置。 【实验原理】
FQJ 型教学用非平衡直流电桥包括单臂直流电桥,非平衡直流电桥,上节我们已经对单臂电 桥有所了解,下面对非平衡电桥的工作原理进行介绍。 图1 非平衡电桥原理图 1.非平衡电桥桥路输出电压 非平衡电桥原理如图1所示,当负载电阻g R →∞ ,即电桥输出处于开路状态时,g 0I = ,仅有电压输出,并用0U 表示,根据分压原理,ABC 半桥的电压降为S U ,通过14, R R 两臂的电流为: S 1414 U I I R R ==+ (1) 则4 R 上之电压降为: 4BC S 14R U U R R =?+ (2) 同理 3R 上的电压降为: 3DC S 23R U U R R =?+ (3) 输出电压0U 为BC U 与DC U 之差
伺服驱动器的工作原理 随着全数字式交流伺服系统的出现,交流伺服电机也越来越多地应用于数字控制系统中。为了适应数字控制的发展趋势,运动控制系统中大多采用全数字式交流伺服电机作为执行电动机。在控制方式上用脉冲串和方向信号实现。 一般伺服都有三种控制方式:速度控制方式,转矩控制方式,位置控制方式。 速度控制和转矩控制都是用模拟量来控制的。位置控制是通过发脉冲来控制的。具体采用什么控制方式要根据客户的要求,满足何种运动功能来选择。 如果您对电机的速度、位置都没有要求,只要输出一个恒转矩,当然是用转矩模式。 如果对位置和速度有一定的精度要求,而对实时转矩不是很关心,用转矩模式不太方便,用速度或位置模式比较好。如果上位控制器有比较好的死循环控制功能,用速度控制效果会好一点。如果本身要求不是很高,或者,基本没有实时性的要求,用位置控制方式对上位控制器没有很高的要求。就伺服驱动器的响应速度来看,转矩模式运算量最小,驱动器对控制信号的响应最快;位置模式运算量最大,驱动器对控制信号的响应最慢。 对运动中的动态性能有比较高的要求时,需要实时对电机进行调整。那么如果控制器本身的运算速度很慢(比如PLC,或低端运动控制器),就用位置方式控制。如果控制器运算速度比较快,可以用速度
方式,把位置环从驱动器移到控制器上,减少驱动器的工作量,提高效率(比如大部分中高端运动控制器);如果有更好的上位控制器,还可以用转矩方式控制,把速度环也从驱动器上移开,这一般只是高端专用控制器才能这么干,而且,这时完全不需要使用伺服电机。换一种说法是: 1、转矩控制:转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,具体表现为例如10V 对应5Nm的话,当外部模拟量设定为5V时电机轴输出为2.5Nm:如果电机轴负载低于2.5Nm时电机正转,外部负载等于2.5Nm时电机不转,大于2.5Nm时电机反转(通常在有重力负载情况下产生)。可以通过实时的改变模拟量的设定来改变设定的力矩大小,也可通过通讯方式改变对应的地址的数值来实现。应用主要在对材质的受力有严格要求的缠绕和放卷的装置中,例如饶线装置或拉光纤设备,转矩的设定要根据缠绕的半径的变化随时更改以确保材质的受力不会随着缠绕半径的变化而改变。 2、位置控制:位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置。应用领域如数控机床、印刷机械等等。 3、速度模式:通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环PID控制时速度模式也可以进行
直流单臂电桥的工作原理 直流单臂电桥又称惠斯登电桥,其原理电路如上图所示,图中ac、cb、bd、da四条支路为电桥的四个臂,其中R1(RX)为被测臂,R2、R3构成比列臂,R4称为较臂。在电桥的对角线cd 上连接指零仪表(一般是检流计)另一对角线ab上连接直流电源E。 在电桥投入工作时,先接通电源按钮SB,调节电桥的一个臂或几个臂的标准电阻,使检流计指针指示为零,这时,就表示电桥达到平衡。在电桥平衡时,cd两点的电位相等。 则:Uac=Uad, Ucb=Udb 即:I1R1=I4R4, I2R2=I3R3 将这两式相除,得:I1R1/I2R2=I4R4/I3R3 当电桥平衡时,Ig=0 ∴I1=I2,I3=I4 代入上式得: R1R3=R2R4 上式是电桥的平衡条件。它说明:在电桥平衡时,两相对桥臂上电阻乘积等于另外两相对桥臂上电阻的乘积。根据这个关系,在已知三个臂电阻的情况下,就可确定另外一个臂的被测电阻的电阻值。 设被测电阻RX是位于第一个桥臂中,则RX=R2R4/R3。 图1 单臂电桥原理图R1为被测电阻R2、R3、R4为可调电阻P为检流计E为电池。 单臂电桥的使用方法 1、先将检流计的锁扣打开(内外),调节调零器把指针调到零位。 2、把被测电阻接在?的位置上。 要求用较粗较短的连接导线,并将漆膜刮净。接头拧紧,避免采用线夹。因为接头接触不良将使电桥的平衡不稳定,严重时可能损坏检流计。 3、估计被测电阻的大小,选择适当的桥臂比率,使比较臂的四档都能被充分利用。这样容易把电桥调到平衡,并能保证测量结果的4位有效数字。 4、先按电源按钮B,(锁定)再按下检流计的按钮G(点接)。 5、调整比较臂电阻使检流计指向零位,电桥平衡。若指针指?,则需增加比较臂电阻,针指向?,则需减小比较臂电阻。 6、读取数据:比较臂比率臂=被测电阻 7、测量完毕,先断开检流计按钮,在断开电源按钮,然后拆除被测电阻,再将检流计锁扣锁上,以防搬动过程中损坏检流计。 )从而可以测量R3/R4×(R1=R2数值,当电桥平衡时有:R4、R3、R2通过电桥调节.
清 华 大 学 实 验 报 告 系别:机械工程系 班号:72班 姓名:车德梦 (同组姓名: ) 作实验日期 2008年 11月 5日 教师评定: 实验3.3 直流电桥测电阻 一、实验目的 (1)了解单电桥测电阻的原理,初步掌握直流单电桥的使用方法; (2)单电桥测量铜丝的电阻温度系数,学习用作图法和直线拟合法处理数据; (3)了解双电桥测量低电阻的原理,初步掌握双电桥的使用方法。 (4)数字温度计的组装方法及其原理。 二、实验原理 1. 惠斯通电桥测电阻 惠斯通电桥(单电桥)是最常用的直流电桥,如图是它的电路原理图。 图中1R 、2R 和R 是已知阻值的标准电阻,它们和被测电阻x R 连成一个四边形,每一条边称作电桥的一个臂。对角A 和C 之间接电源E ;对角B 和D 之间接有检流计G ,它像桥一样。若调节R 使检流计中电流为零,桥两端的B 点和D 点点位相等,电桥达到平衡,这时可得 x R I R I 21=, 1122I R I R = 两式相除可得 R R R R x 1 2 = 只要检流计足够灵敏,等式就能相当好地成立,被测电阻值x R 可以仅从三个标准电阻
的值来求得,而与电源电压无关。这一过程相当于把x R 和标准电阻相比较,因而测量的准确度较高。 单电桥的实际线路如图所示: 将2R 和1R 做成比值为C 的比率臂,则被测电阻为 CR R x = 其中12R R C =,共分7个档,0.001~1000,R 为测量臂,由4个十进位的电阻盘组 成。图中电阻单位为Ω。 2. 铜丝电阻温度系数 任何物体的电阻都与温度有关,多数金属的电阻随文的升高而增大,有如下关系式: )1(0t R R R t α+= 式中t R 、0R 分别是t 、0℃时金属丝的电阻值;R α是电阻温度系数,单位是(℃-1 )。严格 地说,R α一般与温度有关,但对本实验所用的纯铜丝材料来说,在-50℃~100℃的范围内R α的变化很小,可当作常数,即t R 与t 呈线性关系。于是 t R R R t R 00 -= α 利用金属电阻随温度变化的性质,可制成电阻温度计来测温。例如铂电阻温度及不仅准确度高、稳定性好,而且从-263℃~1100℃都能使用。铜电阻温度计在-50℃~100℃范围内因其线性好,应用也较广泛。 3. 双电桥测低电阻 用下图所示的单电桥测电阻时,被测臂上引线1l 、2l 和接触点1X 、2X 等处都有一定
伺服驱动器原理应用及选型 伺服驱动器简介伺服驱动器(servo drives)又称为伺服控制器、伺服放大器,是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要应用于高精度的定位系统。一般是通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度的传动系统定位,目前是传动技术的高端产品。 伺服驱动器是现代运动控制的重要组成部分,被广泛应用于工业机器人及数控加工中心等自动化设备中。尤其是应用于控制交流永磁同步电机的伺服驱动器已经成为国内外研究热点。当前交流伺服驱动器设计中普遍采用基于矢量控制的电流、速度、位置3闭环控制算法。该算法中速度闭环设计合理与否,对于整个伺服控制系统,特别是速度控制性能的发挥起到关键作用。 在伺服驱动器速度闭环中,电机转子实时速度测量精度对于改善速度环的转速控制动静态特性至关重要。为寻求测量精度与系统成本的平衡,一般采用增量式光电编码器作为测速传感器,与其对应的常用测速方法为M/T测速法。M/T测速法虽然具有一定的测量精度和较宽的测量范围,但这种方法有其固有的缺陷,主要包括: 1)测速周期内必须检测到至少一个完整的码盘脉冲,限制了最低可测转速; 2)用于测速的2个控制系统定时器开关难以严格保持同步,在速度变化较大的测量场合中无法保证测速精度。因此应用该测速法的传统速度环设计方案难以提高伺服驱动器速度跟随与控制性能。 伺服驱动器原理伺服驱动器均采用数字信号处理器(DSP)作为控制核心,可以实现比较复杂的控制算法,实现数字化、网络化和智能化;功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入了软启动电路,以减小启动过程对驱动器的冲击。
12. 5惠斯通电桥和补偿电路 一、测量电阻的方法: 1、欧姆表直接测量 缺点:精度不高 2、伏安法测出电流电压进而算出电阻 缺点:真实电表的内阻会引起系统误差(内接法、外接法) 二、惠斯通电桥 1、惠斯通电桥电路图: 其中R 1、R 2为定值电阻,R 3为可变电阻,R x 为待测电阻,G 为灵敏电流计。 2、测量方法: (1)调节可变电阻R 3 ,使得电 桥上的灵敏电流计示数为0 (2)由电桥平衡可得: 3、惠斯通电桥测电阻的优点: (1)精度高。精度主要取决于电阻阻值的精度和灵敏电流计的精度。 (2)灵敏电流计所在的电桥上没有电流,因此避免了电表内阻的影响。 (3)电源电动势和内阻对测量也没有影响。 例1、如图所示的电桥电路中,电池组电动势ε1=20V ,R 1=240 Ω,R 2=20Ω,R 4=20Ω,电池ε2=2V ,问可变电阻R 3应调到多 大时电流表中电流为0? 例2、将200个电阻连成如图所示的电路,图中各P 点是各支路中连接两个电阻的导线上的点.所有导线 的电阻都可忽略.现将一个电动势为E 、内阻为r 0的 电源接到任意两个P 点处.然后将一个没接电源的P 点处切断,发现流过电源的电流与没切断前一样,则 这200个电阻R 1、R 2…R 100,r 1、r 2…r 100应有怎样的关 系?此时AB 和CD 导线之间的电压为多少? 231x R R R R
例3、有七个外形完全一样的电阻,已知其中六个的阻值相同,另一个的阻值不同。请按照下面提供的器材和操作限制,将那个阻值不同的电阻找出,并指出它的阻值是偏大还是偏小,同时要求画出所用电路图,并对每步判断的根据予以论证。 提供的器材有:①电池。②一个仅能用来判断电流方向的电流表(量程足够),它的零刻度在刻度盘的中央,而且已知当指针向右偏时电流是由哪个接线柱流入电流表的。③导线若干。 操作限制:全部过程中电流表的使用不得超过三次。
R2104 + IRF540 MOS电机驱动全桥学习与实践过程 https://www.doczj.com/doc/bd8664030.html,/bbs/article_1012_130178.html 使用L293或L298等全桥芯片来控制直流电机虽然简便而且成本低廉,但由于它们的内阻较大,在控制大电流的马达时芯片常常过热,导致系统的整体效率较低。在电动车上,马达控制芯片的内阻过大会导致车子的加速度变小。 本人设想在暑假制作一个大的轮式或者履带式机器人,并且希望它能跑到公交车那么快,于是开始研究如何使用MOS管来控制更大电流的电机。 首先,本人参考了《大功率直流马达的驱动——ABU ROBOCON 2005比赛之动力方案》一文中的电路图(原文地址 https://www.doczj.com/doc/bd8664030.html,/article.php?sid=192 ) 按照这个原理图,我热转印制作了单个全桥的实验电路。个别的电阻电容值有所变动。 上电并给予有效的持续高电平信号后发现电路不能驱动马达,而2104开始发烫,540没有任何反应。于是更换2104,但仍出现同样的现象。通过示波器检测发现,高端MOS没有被驱动,而低端MOS的G端信号正常,因而桥没有被导通。更换信号方向,另外半桥仍然出现相同的现象。 本人开始怀疑是BOOTSTRAP电容的问题,于是实验了不同的电容值。但无论怎么变换,问题仍然没有被解决。由于手头没有4148,使用了IN5819作为续流二极管,按道理5819只会比4148更好,不应该成为问题的原因。 由于手头2104只有6片,而所有的都上电并且发热过,于是重新购买了一批2104。在这里感谢周顺同学,那天刚好他毕业考考好,帮我到科技京城买了2104。 更换2104后,电路工作正常。周顺看了看我原来的2104,恍然大悟:原来的芯片是97年前的旧货。 马达欢快地转了起来。由于540的内阻要比298小很多,马达的加速度明显提高,变向时电刷更是发出了闪亮的火星。 回到家后用示波器开始研究高端MOS的G端驱动电压波形。发现在EN端为高的初期,高端MOS的驱动电压突然升至比VCC高10V。此时强推动作用起效。但随着时间的流逝,该电压逐渐衰减为VCC,MOS的导通程度越来越不完全。直到下一个脉冲到来,G端电压又恢复为VCC+10V,但又逐渐衰减。也就是说,用持续的高电平信号来驱动MOS会导致MOS不能被完全导通,致使MOS 发热,马达的实际功率低下。使用PWM信号则可以解决这个问题,它使BOOTSTRAP电容反复充电放电,使高端驱动电压始终维持在一个比较高的水平。倘若想让马达全速前进,不能使用持续的高
非平衡直流电桥的原理和应用 直流电桥是一种精密的电阻测量仪器,具有重要的应用价值。按电桥的测量方式可分为平衡电桥和非平衡电桥。平衡电桥是把待测电阻与标准电阻进行比较,通过调节电桥平衡,从而测得待测电阻值,如单臂直流电桥(惠斯登电桥)、双臂直流电桥(开尔文电桥)。它们只能用于测量具有相对稳定状态的物理量,而在实际工程中和科学实验中,很多物理量是连续变化的,只能采用非平衡电桥才能测量;非平衡电桥的基本原理是通过桥式电路来测量电阻,根据电桥输出的不平衡电压,再进行运算处理,从而得到引起电阻变化的其它物理量,如温度、压力、形变等。 【实验目的】 FQJ型教学用非平衡直流电桥,该仪器集单臂、非平衡电桥于一体,通过本实验能掌握以本实验采用下内容: 1.直流单臂电桥(惠斯登电桥)测量电阻的基本原理和操作方法; 2.非平衡直流电桥电压输出方法测量电阻的基本原理和操作方法; 3.根据不同待测电阻选择不同桥式和桥臂电阻的初步方法及非平衡电桥功率输出法测电阻; 4.单臂电桥采用“三端”法测量电阻的意义。 【实验仪器】 FQJ型教学用非平衡直流电桥;1. FQJ非平衡电桥加热实验装置。2. 【实验原理】 FQJ型教学用非平衡直流电桥包括单臂直流电桥,非平衡直流电桥,上节我们已经对单臂电桥有所了解,下面对非平衡电桥的工作原理进行介绍。 图1 非平衡电桥原理图 1.非平衡电桥桥路输出电压 R??,所示,当负载电阻非平衡电桥原理如图1g 0?I并即电桥输出处于开路状态时,,,仅有电压输出g U ABC为压压,用表示根据分原降半桥的理,电0UR R,电流为:,通过两臂的S41U S?II?41R?R)1(41R则上之电压降为:4. R4??UU(2)SBC R?R41R上的电压降为:同理3R3??UU(3)SDC R?R 32UUU之差为输出电压与DCBC0RR34U?UU?U?U?SS0BCDC R?RR?R3412 ????S RR?R?R3142RR?RRU?0,即电桥处(4))?RR(RR3421U ? 于平衡状态。当满足条件时,电桥输出43210(5)式就称为电桥的平衡条件。为了测量的准确性,在测量的起始点,电桥必须调至平衡,称为预调平R, RRR, RR?。若关电阻变化有臂这样可使输出只固定,与为待测电阻某一,则当衡。1423x4R?R??R时,因电桥不平衡而产生的电压输出为:
伺服电机驱动器的广泛应用 瑞默生智能伺服电机驱动器以其优越的性能可广泛的应用于对位置、速度和力矩的精度要求较高的场合,比如:数控设备、电动门、印刷机械、包装机、贴片机、点胶机、ATM取款机、自动化生产线、医疗设备。一、稳定可靠无 故障应用领域:移动机器人:应用专用驱动器,依照指定路线,自行调整设备运动。不必使用多轴控制模块,驱动器即可调整转向实现自动补偿。可应用在各种需要移动货物的环境,尤其适合于汽车、包装、航空航天和医疗领域。激光雷达、无线电侦测及目标跟踪:微型驱动器系列,可安装于设备中几乎任何位置;结构紧凑,要求布线少;具有支持通讯、精确运动控制回路、输入反馈与可编程性。适用温、湿度差异环境中,因为可广泛应用在对于环境需求较高的领域。机械手:同时使用不同类型驱动器,并与多轴运动控制器结合在一起,组成机械手。根据定义,实现快速、精准、平滑的组合运动;保证低故障率以及连续长时间工作。可广泛应用于高精度机械加工、生产制造的无人生产环境中。二、功能描述:瑞默生智能伺服电机驱动器不但具有伺服电机驱动器的所有功能而且具备完整的PLC运动控制的功能,通过简单的配置即可实现机器上电回原点、梯形(圆弧)曲线运动控制、PVT曲线运动控制、外部中断响应等功能;此外驱动器提供丰富的外部IO接口方便用户实现左右限位开关、伺服 使能、刹车、回零、开关输入输出、模拟量输入等机器功能。和一般的驱动器相比,瑞默生智能伺服电机驱动器具备以下四大突出特点:1、兼容性好:智 能伺服电机驱动器不仅可以实现对高精度的交流伺服电机的控制,同时可以支持:直流伺服、无刷伺服、步进伺服、直线电机、音圈电机、力矩电机等电机。电机的编码器可以选择旋变、增量式编码器、磁编码器、正余弦编码器、线性霍尔、光栅尺等类型,方便用户的伺服电机适应各种强震动、高低温等恶劣环
电机驱动及控制模块
3.3电机驱动及控制模块 331 电机特性 —小车前进的动力是通过直流电机来驱动的,直流电机是最早出现的电动机, 也是最早能实现调速的电动机。长期以来,直流电动机一直占据着调速控制的 统治地位。它具有良 图7主、从单片机小系统应用电路 好的线性调速特性,简单的控制性能, 较高的效率,优异的动态特性。系统 选用的大谷基础车的260马达作为驱动电机。其额定电压为 3-12V ,额定功率 0.02KW 额定转速 3000r/min 。 近年来,直流电动机的结构和控制方式都发生了很大变化, 随着计算机进入 控制领域,以及新型的电力电子功率元件的不断出现,使采用全控制型的开关 功率元件进行脉冲调制(Pulse Width Modulation 简称PWM 控制方式已经成 为主流,这种控制方式容易在单片机控制中实现。 BE yr CAPCAP 2+ CAP + CiP I * EP Z CAP b HT-OVTl rr-xrr: T-m TDU rae.-[tfi E-C'UTL 化UT2 H 山习4 F21TF 匸曲 ~IF P22 vcc P22 m 酯T KX1WXI Pi - ? TTCZ'JPJL Pl? YT 11 T m 電 XTALi P14 nffo/pss F13 D1TLJP3J P12 JP34 P1J PLD PA 回■! P 討TCAO PM 时 ow P 禹 PIO Vcc P]1 FOCUADQ P32 POL/ADL E>JJ ! Plfl Pt3(AD3 P]5 P 】6 f :^AD5 P17 P0*'AD6 PB7/AD7 RST Tmjpsi EX LVD^ fiZRST2 AL&FI 5 曲朗 卜⑷PJ 4 wwu TflrP34 ri 郴 PIT PM 廻p 北 F35 FiZiiP]! F24 F33 xrAi.3 P]3 j^TALL P.3L Pin tr 空【 时 LED T 级, 厂:1巧处4打"卜单怜机 VCC 鱼T Z? 1. P ■ ■ ?一 ■■ ■ ■ b w 1 ? 3 *?!>rr ? .1 L I I I I r —PF p p Lp
第一章概述 欧阳歌谷(2021.02.01) 1.1 产品简介: 交流伺服技术自九十年代初发展至今,技术日臻成熟,性能不断提高,现已广泛应用于数控机床、印刷馐机械、纺织机械、自动化生产线等自动化领域。 DDA98交流伺服系统系国产第一代全数字交流伺服系统,采用国际最新数字信号处理DSP)、大规模可编程门阵列(CPLD)和MISUBISHI智能化功率模块(IPM),集成度高、体积小、保护完善、可靠性好、彩最何必PID算法完成PWM控制,性能已达到国外同类产品的水平。 与步进系统相比,DA98交流伺服系统具有以下优点 ●避免失步现象 伺服电机自带编码器,位置信号反馈至伺服 驱动器,与开环位置控制器一起构成半闭环 控制系统。 ●宽速比、恒转矩 调速比为1:5000,从低速到高速都具有稳 定的转矩特性。 ●高速度、高精度
伺服电机最高转速可达3000rpm,回转定位 精度1/10000r。 〖注〗不同型号伺服电机最高转速不同。 ●控制简单、灵活 通过修改参数可对伺服系统的工作方式、运 行特性作出适当的设置,以适应不同的要求。 1.2 到货检查 1)收货后,必须进行以下检查: (1)包装箱是否完好,货物是否因运输受损? (2)核对伺服驱动器和伺服电机铭牌,收到货物是否确系所订货物? (3)核对装箱单,附件是否齐全? 2)型号意义: (1)伺服驱动器型号 DA98-04-110STZ2-1-HM 适配伺服电机型号(示出华中理工大学电机厂STZ系列)※1 输出功率:两位数字(04、06……23)对应0.4~2.3KW ※2
系列代号 ※1:可选配其它国产、进口伺服电机,需订货。驱动器缺 省参数仅适配STZ 系列伺服电机,选配其它伺服电机时,出厂参数已备份在EEPROM 区。恢复出厂参数时应执行恢复备份,不可执行恢复缺省参数操作。 ※2:中小功率(小于等于 1.5KW )为标准配置,中功率 (大于1.5KW 、小于等于2.3KW )采用加厚散热器。 〖注〗产品出厂时,上面填写框已按产品型号填写好,请用户与产品铭牌核对。 (2) 伺服电机型号 DA98交流伺服驱动器可与国内外多款伺服电机配套,由用户订货时选择。本手册按华中电机厂生产的伺服电机进行描述,其它型号伺服电机有关资料随伺服电机提供。 110 STZ 4 —— 1 HM 3)附件 (1) DA98伺服驱动器标准附件 ① 安装使用手册(本书) 1本 ② 安装支架 2个 ③ M4×8沉头螺钉 4个 ④ CN1插头(DB25孔) 1套 ( 注 1) ⑤ CN2插头(DB25针) 1套 (注 光电编码器反馈 电机工作电压H :300V L :200V 额定转速级别 1:低速(1500/2000r p m ) 2:高速(2500/3000rpm ) 零速转矩2、4、5、6、7.5、10…N.m 正弦波驱动伺服电机
步进电机驱动之全桥驱动与斩波恒流 先看两相绕组的全桥驱动电路,四路基本相同的驱动电路,抓取一组电路来分析: 全桥驱动电路,其中Q7和Q8基极和发射极短接,相当于一个反向的二极管。 为了便于分析,将原理图简化后如下所示:
查看IM2000S芯片手册,对全桥驱动芯片输入脚的定义如下: 以上四个输入端:B相高低端全桥控制信号,用来控制离散的PN,NN的全桥或者半桥IC. 从上述可以知道,输出的是一个离散量,那么,是怎样控制电机,使电机获得一个sin和cos 的电流信号而驱动电机的呢? 这里要深入理解一个概念:斩波恒流! 斩波恒流的原理是:当环形分配器导通的时候,IC2使得TL和TH导通,电源通过TH和TL 和电机向下有电流输出,此时R左端的电压上升,当电流上升到给定电平时,比较器反转,输出为低,使得IC1截止,此时电感使电流缓慢下降,此时通过TL采样的电压变低,当电压低于给定电平时候,比较器反转,使得IC1再次导通,这样可以快速的波动,而使电感上的电流保持一个恒定的值。当环形分配器给出低电平时,IC1和IC2截止,电流通过D2流入电源,从而实现节能。 此时,再看上图,会发现: 1、BHO和ALO为一个通路,AHO和BLO为一个通路,实现电流的正向和反向。 2、BHO和AHO的开关频率会比BL0,ALO大很多,BL0和ALO只有在正向和负方向反转的时 候出现跳变,而BHO和AHO的频率会很快以实现恒流。
这里值得注意的一点是,上述过程仅仅是在一个细分时候,一个数模转换量上保持的恒流。如果整步为256细分,则在256细分的每一个细分阶段实际上过程就是上文红色字体运行一遍的一个过程,而要使整个电机转动一圈,则需要完成一个SIN和COS的整个过程,如果上面的过程仍然无法理解,请参看步进电机细分方面的内容。 从整个驱动电路的系统上看, 整个闭环是按照如下进行工作的:
在复杂的机械系统中,研究其功耗和性能,设计它们的结构以及研究各模块组间的润滑状态,测量各器件间的摩擦力等重要参数,多年来,一直被人们所重视。由于机械内部运动复杂,环境恶劣,摩擦力相对很小,给测量带来了很大困难,如何精确地测量出这些数据就显得格外重要。 采用立创无线收发方式,利用传感器信号通过无线收发电路进行信号传输,可以先存储数据再把存储卡里面的数据读入到计算机进行分析,为复杂及数据要求精确的系统的数据采集提供了新的方法。另外,在采集频率较高时,数据量比较大,这对采集系统中处理器处理速度、射频无线传输速度、接口传输速度、A/D 转换速度以及功耗等都有很高的要求,加上机械系统内部尺寸的限制,困难较大。这样一来,数据采集电路板的设计成为该数据采集系统的关键,我们需要设计专门的数据采集和无线收发装置。 测量系统原理 系统由传感器、电源、信号调理电路、信号处理电路和PC 机组成在实际测量时,传感器安装在运动件上,由于采用引线装置传递信号会限制机械部件的运动,因此可采用无线收发电路传输数据,也可采用存储方式进行数据采集,即先把数据保存到存储卡,数据采集完之后再拿出存储卡读入到计算机,测量系统原理如图1 所示。 气压传感器和应变片经过信号调理电路输出0~2.5V 的电压,可通过信号处理电路把模拟信号转化为数字信号再存入存储卡,热电偶经过信号调理电路输出12 位SPI 格式的数字信号,可由单片机直接把信号存入存储卡。存储卡的容量应能保证采集信号的时间要求(在采集频率为3000Hz 时,选择512M以上的存储卡可保证采集时间不少于25 分钟)。而该测量系统中电阻应变片直流电桥测量电路的设计是一个关键,下面我们将对这一部分进行详细的分析和设计。 电阻应变片直流电桥测量电路
智能车竞赛中直流电机调速系统的设计与比较 王名发,江智军,邹会权 时间:2009年12月04日 字 体: 大中小关键词:直流电机调速系统MC33886VNH3SP30BTS7960BDT340IIRF3205 摘 要:针对大学生智能车竞赛中直流电机的驱动设计了6种方案,经过实验比较分析了各种方案的优缺点,最后确立了一套驱动能力强、体积小、性能稳定的驱动方法,可广泛应用于40 V以下的大功率直流电机驱 动的场合。 关键词:直流电机;调速系统; MC33886; VNH3SP30; BTS7960B; DT340I; IRF3205 目前大电流直流电机多采用达林顿管或MOS管搭制H桥PWM脉宽调制,因此体积较大;另一方面,由于分立器件的特性不同,使得驱动器的特性具有一定的离散性;此外,由于功率管的开关电阻比较大,因此功耗也很大,需要功率的散热片,这无疑进一步加大了驱动器的体积。随着技术的迅猛发展,基于大功率MOS管的H桥驱动芯片逐渐显现出其不可替代的优势。但目前能提供较大电流输出的集成芯片不是很多。例如飞思卡尔半导体公司推出的全桥驱动芯片MC33886和33887、意法半导体公司推出的全桥驱动芯片VNH3SP30、英飞凌公司推出的高电流PN半桥驱动芯片BTS7960。ST微电子公司推出的TD340驱动器芯片是一种用于直流电机的控制器件,可用于驱动N沟道MOSFET管。 本文在第三、四届大学生智能车大赛中分别尝试了上面提到的5块电机驱动芯片设计的驱动电路,通过现场调试发现它们的优缺点,确定了驱动能力强、性能稳定的驱动方案,并得到了很好的应用。 1 直流电机驱动原理 目前直流电机的驱动方式主要有2种形式:线性驱动方式和开关驱动方式。其中线性驱动方式可以看成一个数控电压源。该驱动方式的优点是驱动电机的力矩纹波很小,可应用于对电机转速要求非常高的场合;缺点是该方式通常比较复杂,成本较高,尤其是要提高驱动的功率时,相应的电路成本将提升很多[1]。本文针对H桥驱动电路在智能车竞赛中的应用加以分析。 目前的H桥驱动主要有3种方式。图1(a)中H桥的4个桥臂都使用N沟道增强型MOS管;图1(b)中H 桥的4个桥臂都使用P沟道增强型MOS管;图1(c)中上H桥臂分别使用P沟道增强型MOS管和N沟道增强MOS管。由于P沟道MOS管的品种少、价格较高,导通电阻和开关速度等都不如N沟道MOS管,因此最理想的情况应该是在H桥的4个桥臂都使用N沟道MOS管。但是在如图1(a)中可以看到,为了使电机正转,Q1和Q4应该导通,因此S4电压应该高于Q4的源极电压,S1电压应该高于Q1的源极电压,由于此时Q1的源极电压近似等于Vcc,因此就要求S1必须大于(Vcc+Vgs)。在很多电路中除非作一个升压电路否则是比较困难得到的,因此图1(a)这种连接方式比较少见。同理,图1(b)中为了使电机正转,S4电压就必须低于0V- VGS,在使用时也不方便。因此最常用的是图1(c)的电路,该电路结合了上述2种电路各自的优点,使用方便。本文针对3种形式电路进行设计,并进行实验比较分析。
实验四直流电桥的原理和应用 【背景知识】 直流电桥是一种精密的电阻测量仪器,具有重要的应用价值。按电桥的测量方式可分为平衡电桥和非平衡电桥。平衡电桥是把待测电阻与标准电阻进行比较,通过调节电桥平衡,从而测得待测电阻值,如单臂直流电桥(惠斯登电桥)、双臂直流电桥(开尔文电桥);非平衡电桥则是通过测量电桥输出(电压、电流、功率等)并进行运算处理,得到待测电阻值。直流电桥还可用于测量引起电阻变化的其它物理量,如温度、压力、形变等,在检测技术、传感器技术中的应用非常广泛。平衡电桥只能用于测量具有相对稳定状态的物理量,而在实际工程和科学实验中,很多物理量是连续变化的,只能采用非平衡电桥才能测量。 【实验目的】 本实验采用FQJ 型教学用非平衡直流电桥,该仪器集单臂、非平衡电桥于一体,通过本实验能掌握以下内容: (1)直流单臂电桥(惠斯通电桥)测量电阻的基本原理和操作方法; (2)非平衡直流电桥电压输出方法测量电阻的基本原理和操作方法; (3)根据不同待测电阻选择不同桥式和桥臂电阻的初步方法。 【实验原理】 1.平衡电桥 单臂直流电桥是平衡电桥,又称惠斯通电桥,其电路见图4.4.1。其中1R 、2R 、3R 、4R 构成一电桥,A 、 C 两端加一恒定桥压S U ,B 、 D 之间有一检流计PA , 当电桥平衡时,B 、D 两点为等电位,PA 中无电流流 过,此时有AB AD U U ,41I I ,32I I ,于是有3421R R R R (4.4.1) 图4.4.1惠斯通电桥
如果R 4为待测电阻R X ,R 3为标准比较电阻,则有 1332X R R R K R R & &(4.4.2) 其中21/R R K ,称其为比率(一般惠斯登电桥的K 有001.0、01.0、1.0、1、10、100、1000等。本电桥的比率K 可以任选)。根据待测电阻大小,选择K 后,只要调节3R ,使电桥平衡,检流计为0,就可以根据(4.4.2)式得到待测电阻X R 之值。 2.非平衡电桥 非平衡电桥原理如图4.4.2所示:B 、D 之间为一 负载电阻g R ,只要测量电桥输出g U 、g I , 就可得到x R 值。根据电桥各臂电阻关系可将非平衡电桥分为三类: (1)等臂电桥:4321R R R R ; (2)输出对称电桥(卧式电桥):R R R 41, R R R 32,且R R ;(3)电源对称电桥(立式电桥):R R R 21,R R R 43,且R R 。 当负载电阻! g R ,即电桥输出处于开路状态时,0 g I ,仅有电压输出,在此用0U 表示,根据分压原理,ABC 半桥的电压降为S U ,通过1R 、4R 两臂及2R 、3R 两臂的电流为: 14231423,S S U U I I I I R R R R ##,(4.4.3) 则输出电压0U 为 ?%?%324134014231423()BC DC S S S R R R R R R U U U U U U R R R R R R R R &?& ? &?& &###&#(4.4.4) 当满足条件1324R R R R & &(4.4.5) 时,电桥输出00 U ,即电桥处于平衡状态。(4.4.5)式称为电桥的平衡条件。为了测量的准确性,在测量的起始点,电桥必须调至平衡,称为预调平衡。这样可使输出只与某一臂 电阻变化有关。 图4.4.2非平衡电桥
伺服电机和伺服驱动器的使用介绍 一、伺服电机? 伺服驱动器的控制原理 伺服电机和伺服驱动器是一个有机的整体,伺服电动机的运行性能是电动机及其驱动器二者配合所反映的综合效果。 1、永磁式同步伺服电动机的基本结构 图1为一台8极的永磁式同步伺服电动机结构截面图,其定子为硅钢片叠成的铁芯和三相绕组,转子是由高矫顽力稀土磁性材料(例如钕铁錋)制成的磁极。为了检测转子磁极的位置,在电动机非负载端的端盖外面还安装上光电编码器。驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。 图1 永磁式同步伺服电动机的结构 图2 所示为一个两极的永磁式同步电机工作示意图,当定子绕组通上交流电源后,就产生一旋转磁场,在图中以一对旋转磁极N、S表示。当定子磁场以同步速n1逆时针方向旋转时,根据异性相吸的原理,定子旋转磁极就吸引转子磁极,带动转子一起旋转,转子的旋转速度与定子磁场的旋转速度(同步转速n1)相等。当电机转子上的负载转矩增大时,定、转子磁极轴线间的夹角θ就相应增大,导致穿过各定子绕组平面法线方向的磁通量减少,定子绕组感应电动势随之减小,而使定子电流增大,直到恢复电源电压与定子绕组感应电动势的平衡。这时电磁转矩也相应增大,最后达到新的稳定状态,定、转子磁极轴线间的夹角θ称为功率角。虽然夹角θ会随负载的变化而改变,但只要负载不超过某一极限,转子就始终跟着定子旋转磁场以同步转速n1转动,即转子的转速为: (1-1)
图 2 永磁同步电动机的工作原理 电磁转矩与定子电流大小的关系并不是一个线性关系。事实上,只有定子旋转磁极对转子磁极的切向吸力才能产生带动转子旋转的电磁力矩。因此,可把定子电流所产生的磁势分解为两个方向的分量,沿着转子磁极方向的为直轴(或称d轴)分量,与转子磁极方向正交的为交轴(或称q轴)分量。显然,只有q轴分量才能产生电磁转矩。 由此可见,不能简单地通过调节定子电流来控制电磁转矩,而是要根据定、转子磁极轴线间的夹角θ确定定子电流磁势的q轴和d轴分量的方向和幅值,进而分别对q 轴分量和d轴分量加以控制,才能实现电磁转矩的控制。这种按励磁磁场方向对定子电流磁势定向再行控制的方法称为“磁场定向”的矢量控制。 2、位置控制模式下的伺服系统是一个三闭环控制系统,两个内环分别是电流环和速度环。 图 3 ? 稳态误差接近为零; ? 动态:在偏差信号作用下驱动电机加速或减速。
非平衡直流电桥的原理和应用 【背景知识】 直流电桥是一种精密的电阻测量仪器,具有重要的应用价值。按电桥的测量方式可分为平衡电桥和非平衡电桥。平衡电桥是把待测电阻与标准电阻进行比较,通过调节电桥平衡,从而测得待测电阻值,如单臂直流电桥(惠斯登电桥)、双臂直流电桥(开尔文电桥);非平衡电桥则是通过测量电桥输出(电压、电流、功率等)并进行运算处理,得到待测电阻值。 直流电桥还可用于测量引起电阻变化的其它物理量,如温度、压力、形变等,在检测技术、传感器技术中的应用非常广泛。平衡电桥只能用于测量具有相对稳定状态的物理量,而在实际工程中和科学实验中,很多物理量是连续变化的,只能采用非平衡电桥才能测量。 【实验目的】 本实验采用FQJ 型教学用非平衡直流电桥,该仪器集单臂、非平衡电桥于一体,通过本实验能掌握以下内容: (1) 直流单臂电桥(惠斯通电桥)测量电阻的基本原理和操作方法; (2) 非平衡直流电桥电压输出方法测量电阻的基本原理和操作方法; (3) 根据不同待测电阻选择不同桥式和桥臂电阻的初步方法。 【实验原理】 1.平衡电桥 单臂直流电桥是平衡电桥,又称惠斯通电桥,其电路见图4.4.1。其中1R 、2R 、3R 、4R 构成一电桥,A 、 C 两端加一恒定桥压S U ,B 、 D 之间有一检流计PA , 当电桥平衡时,B 、D 两点为等电位,PA 中无电流流过,此时有AB AD U U =,41I I =,32I I =,于是有 3 4 21R R R R = (4.4.1) 图4.4.1 惠斯通电桥
如果R 4为待测电阻R X ,R 3为标准比较电阻,则有 1 332 X R R R K R R = ?=? (4.4.2) 其中21/R R K =,称其为比率(一般惠斯登电桥的K 有001.0、01.0、1.0、1、10、100、 1000等。本电桥的比率K 可以任选)。根据待测电阻大小,选择K 后,只要调节3R ,使电 桥平衡,检流计为0,就可以根据(4.4.2)式得到待测电阻X R 之值。 2.非平衡电桥 非平衡电桥原理如图4.4.2所示:B 、D 之间为一负载电阻g R ,只要测量电桥输出g U 、g I ,就可得到x R 值。根据电桥各臂电阻关系可将非平衡电桥分为三类: (1)等臂电桥:4321R R R R ===; (2)输出对称电桥(卧式电桥):R R R ==41, R R R '==32,且R R '≠; (3)电源对称电桥(立式电桥):R R R '==21,R R R ==43,且R R '≠。 当负载电阻∞→g R ,即电桥输出处于开路状态时,0=g I ,仅有电压输出,在此用 0U 表示,根据分压原理,ABC 半桥的电压降为S U ,通过1R 、4R 两臂及2R 、3R 两臂的 电流为: 14231423,S S U U I I I I R R R R == ==++, (4.4.3) 则输出电压0U 为 ()()324134 014231423()BC DC S S S R R R R R R U U U U U U R R R R R R R R ?-?=-= ?-?=?+++?+ (4.4.4) 当满足条件 1324R R R R ?=? (4.4.5) 时,电桥输出00=U ,即电桥处于平衡状态。(4.4.5)式称为电桥的平衡条件。为了测量的准确性,在测量的起始点,电桥必须调至平衡,称为预调平衡。这样可使输出只与某一臂 电阻变化有关。 图4.4.2 非平衡电桥