零件的设计与选型
1 定平台的设计
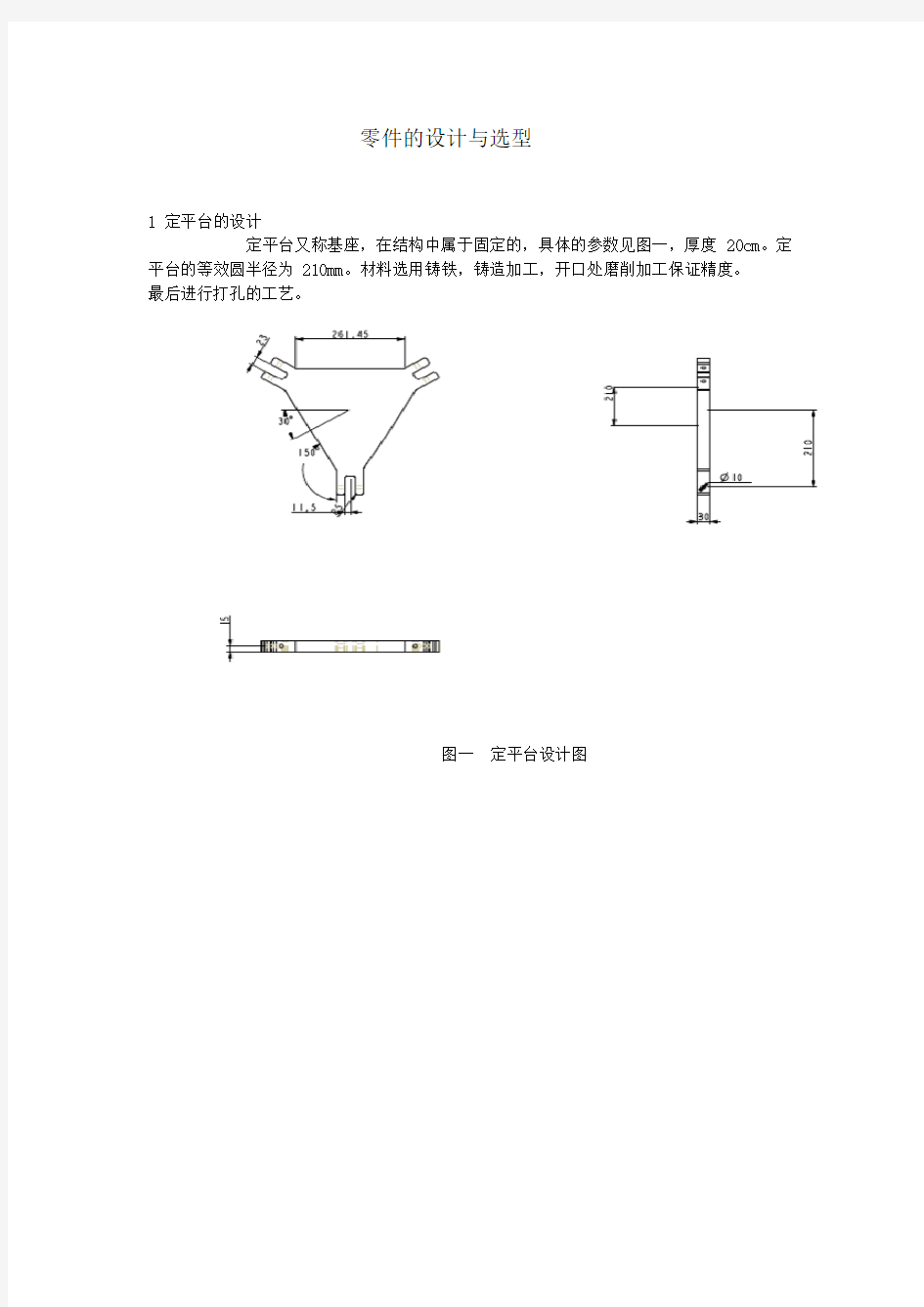
定平台又称基座,在结构中属于固定的,具体的参数见图一,厚度 20cm。定平台的等效圆半径为 210mm。材料选用铸铁,铸造加工,开口处磨削加工保证精度。
最后进行打孔的工艺。
图一定平台设计图
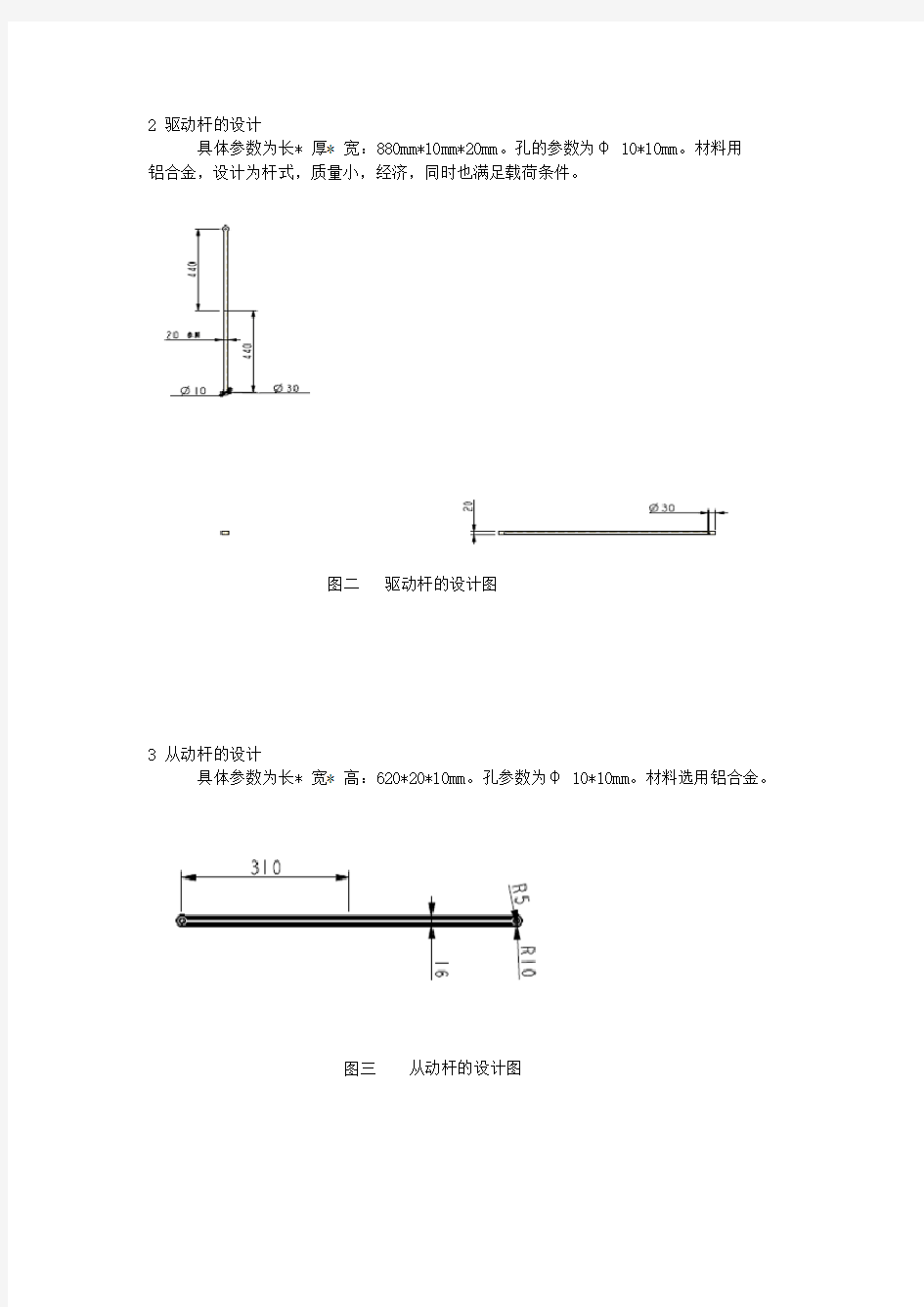
具体参数为长* 厚* 宽:880mm*10mm*20mm。孔的参数为φ 10*10mm。材料用
铝合金,设计为杆式,质量小,经济,同时也满足载荷条件。
图二驱动杆的设计图
3 从动杆的设计
具体参数为长* 宽* 高:620*20*10mm。孔参数为φ 10*10mm。材料选用铝合金。
图三从动杆的设计图
参数如下图,考虑到重量因素,采用铝合金,切削加工。动平台的等效圆半径为 50mm,分布角为21.5°。
图四动平台的设计图
5 链接销的设计
45号钢,为主动杆和定平台的连接销:φ 9*66mm。
6 球铰链的选型
目前,大多数的Delta机构的主动杆与从动杆的链接方式为球铰链的链接。球型连接铰链是用于自动控制中的执行器与调节机构的连接附件。它采用了球型轴承结构具有控制灵活、准确、扭转角度大的优点,由于该铰链安装、调整方便、安全可靠。所以,它广泛地应用在电力、石油化工、冶金、矿山、轻纺等工业的自动控制系统中。球铰链由于选用了球型轴承结构,能灵活的承受来自各异面的压力。本文选用球铰链设计,是主要因为球铰链的可控性,以及结构简单,易于装配。且有很好的可维护性。
本文选用了伯纳德的 SD 系列球铰链,相对运动角为60°。
7 垫圈的选型
此处我们选用标准件。GB/T 97.1 10‐140HV ,10.5*1.6mm。
8 电机的选型
本设计的 Delta 机器人,主要面向工业中轻载的场合,比如封装饼干等。因此,以下做电动机的选型处理。
由于需要对角度的精确控制,因此决定选用伺服电机。交流伺服电机有以下特点:启动转矩大,运行范围广,无自转现象,正常运转的伺服电动机,只要失去控制电压,电机立即停止运转,这也是 Delta 机构需要的。交流伺服电动机运行平稳、噪音小。但控制特性是非线性,并且由于转子电阻大,损耗大,效率低,因此与同容量直流伺服电动机相比,体积大、重量重,所以只适用于 0.5-100W 的小功率控制系统。
在本设计中,电动机的功率计算如下:机构的最高速度不超过 2m/s,考虑到运动杆件重量,摩擦力等。综合载重 5kg。则,P=FV=5kg*10m/s2*2m/s=100W。取安全因子为 1.2,则每个电机的功率为 1.2*100W/3=40W。故初步选用下面下表两款:
考虑到经济原因,在其它参数相似的情况下,我们在这里选择三菱的HC-MFS/kfso53k。
9 执行器的设计与选型
考虑选用电控吸盘或机械手。
(注:素材和资料部分来自网络,供参考。请预览后才下载,期待你的好评与关注!)