机电学院 工业工程系导师简介 王润孝教授 王润孝,1957年1月生,教授,机械工程和管理科学与 工程学科博士生导师,西北工业大学制造自动化软件与信息 研究所所长。1982年、1998年分获西北工业大学机电控制与 自动化专业工学硕士学位和航空宇航制造工程学科工学博士 学位。1989 年至 1990 年在美国马里兰大学作访问学者。 兼任教育部机械学科教学指导委员会委员,教育部高等 学校文化素质教育指导委员会委员,全国工程教育专业认证 专家委员会委员、全国高等学校教学研究会常务理事、陕西 省机械工程学会副理事长、西安市科协副主席等职务。 任教以来,为博士、硕士、本科生讲授“数控机床”、“制造技术新哲理”、“数字技术”“人力资源开发与研究”等6门课程,累计指导博士和硕士研究生70余名,发表学术论文180余篇,编写专著及教材8项。主持以及参加的国家自然科学基金、航空自然基金、陕西省科学基金、陕西省攻关计划项目以及横向课题二十余项,获省部级以上科技成果奖9项。 孙树栋教授 孙树栋,男,1963年生,中共党员。1989年南京航空航天大学机械工程 专业获博士学位,曾在英国Sheffield(谢菲尔德)、Strathclyde(斯克莱德) 等大学任访问学者。现任西北工业大学教授、博士生导师。 在国家自然科学基金、863计划、国防基础科研、总装预研等项目的持续支持下,提出了遗传模拟退火算法、遗传免疫算法等新算法,有效解决了机器 人控制、车间计划调度等面临的多目标、有约束优化难题;提出了建立企业生 产过程资金流模型、基于组件的可重构信息管理系统等理论与方法;建立了稳 固的科研团队,研制成功具有自主知识产权的可重构制造执行系统、协同服务 系统,在10余家企业得到成功应用,产生了显著的经济效益和社会效益。 撰写专著、主编教材8部,发表学术论文140余篇,其中70余篇被SCI、EI、ISTP收录。研究成果获国家科技进步二等奖1项、省部级科技奖7项。曾荣获教育部优秀青年教师奖、航空青年科技奖。 秦现生教授 秦现生:男,1962年生,博士、教授、博士导师。中英机械电子产品设 计研究所所长。曾在英国strathclyde大学任高级访问学者合作研究一年。主 要从事生物机电、空间机电、远程机电、现代数控、智能机器人、过程测控与 自动化、数字装备、故障诊断、产品开发管理、先进制造模式、质量管理以及 智能制造等方面的研究,发表学术论文140余篇,出版教材、专著8部,获省 部级以上教学科研成果奖4项。先后完成国家自然科学基金、国家863计划、 航空基金、陕西省科学基金及横向课题30多项。目前正在承担欧盟Asia-Link Programme国际合作项目、国防科研项目和各基金项目总经费650余万元。培养博士研究生30余名、硕士研究生近50名,与英、法等国外大学联合培养在读的博士研究生3人。
大作业(二) 凸轮机构设计 (题号:4-A) (一)题目及原始数据···············(二)推杆运动规律及凸轮廓线方程·········(三)程序框图········· (四)计算程序·················
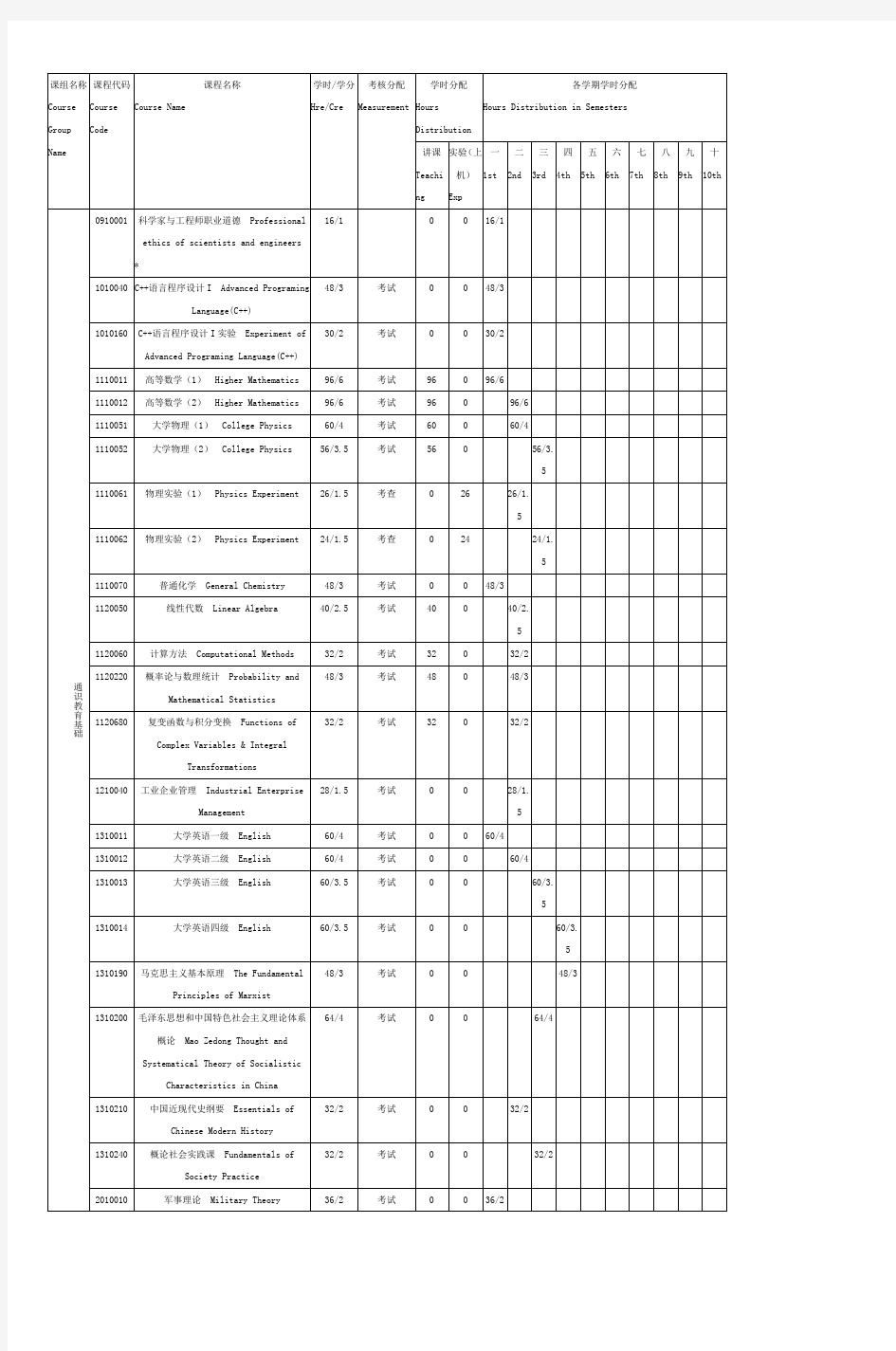
(五)程序计算结果及分析·············(六)凸轮机构图·················(七)心得体会··················(八)参考书··················· 一题目及原始数据 试用计算机辅助设计完成偏置直动滚子推杆盘形凸轮机构的设计 (1)推程运动规律为五次多项式运动规律,回程运动规律为余弦加速度运动规律; (2)打印出原始数据; (3)打印出理论轮廓和实际轮廓的坐标值; (4)打印出推程和回程的最大压力角,以及出现最大压力角时凸轮的相应转角;(5)打印出凸轮实际轮廓曲线的最小曲率半径,以及相应的凸轮转角; (6)打印最后所确定的凸轮的基圆半径。 表一偏置直动滚子推杆盘形凸轮机构的已知参数 题号初选的 基圆半 径 R0/mm 偏距 E/mm 滚子 半径 Rr/m m 推杆行 程 h/mm 许用压力角许用最小曲率半径 [ρamin] [α1] [α2] 4-A 15 5 10 28 30°70?0.3Rr 计算点数:N=90 q1=60; 近休止角δ1 q2=180; 推程运动角δ2 q3=90; 远休止角δ3 q4=90; 回程运动角δ4 二推杆运动规律及凸轮廓线方程推杆运动规律: (1)近休阶段:0o≤δ<60 o s=0;
ds/dδ=0; 2/δd 2 d=0; s (2)推程阶段:60o≤δ<180 o 五次多项式运动规律: Q1=Q-60; s=10*h*Q1*Q1*Q1/(q2*q2*q2)-15*h*Q1*Q1*Q1*Q1/(q2*q2*q2*q2)+6*h*Q1*Q1*Q 1*Q1*Q1/(q2*q2*q2*q2*q2); ds/dδ =30*h*Q1*Q1*QQ/(q2*q2*q2)-60*h*Q1*Q1*Q1*QQ/(q2*q2*q2*q2)+30*h*Q1*Q1*Q 1*Q1*QQ/(q2*q2*q2*q2*q2); 2/δd 2 d=60*h*Q1*QQ*QQ/(q2*q2*q2)-180*h*Q1*Q1*QQ*QQ/((q2*q2*q2*q2))+1 s 20*h*Q1*Q1*Q1*QQ*QQ/((q2*q2*q2*q2*q2)); (3)远休阶段:180o≤δ<270 o s=h=24; ds/dδ=0; 2/δd 2 d=0; s (4)回程阶段:270≤δ<360 Q2=Q-270; s=h*(1+cos(2*Q2/QQ))/2; ds/dδ=-h*sin(2*Q2/QQ); 2/δd 2 d=-2*h*cos(2*Q2/QQ); s 凸轮廓线方程: (1)理论廓线方程: s0=sqrt(r02-e2) x=(s0+s)sinδ+ecosδ y=(s0+s)cosδ-esinδ (2)实际廓线方程 先求x,y的一、二阶导数 dx=(ds/dδ-e)*sin(δ)+(s0+s)*cos(δ);
1.利用图形用户界面创建,备份,删除和还原数据库和数据表(50分,每小题5分) ●数据库和表的要求(第五版教材第二章习题 6 要求的数据库) 数据库名:SPJ,其中包含四张表:S表, P表, J表, SPJ表 ●完成以下具体操作: (1)创建SPJ数据库,初始大小为 10MB,最大为50MB,数据库自动增长,增长方 式是按5%比例增长;日志文件初始为2MB,最大可增长到5MB,按1MB增长。 数据库的逻辑文件名和物理文件名均采用默认值。 (2)在SPJ数据库中创建如图2.1-图2.4的四张表(只输入一部分数据示意即可)。 S表: P表: J表: SPJ表:
(3)备份数据库SPJ(第一种方法):备份成一个扩展名为bak的文件。(提示: 最好先删除系统默认的备份文件名,然后添加自己指定的备份文件名) (4)备份数据库SPJ(第二种方法):将SPJ数据库定义时使用的文件(扩展名为 mdf,ldf的数据文件、日志文件等)复制到其他文件夹进行备份。 原位置: 新的位置: (5)删除已经创建的工程项目表(J表)。 (6)删除SPJ数据库。(可以在系统默认的数据存储文件夹下查看此时SPJ数据 库对应的mdf,ldf文件是否存在) 删除过后文件不存在 (7)利用备份过的bak备份文件还原刚才删除的SPJ数据库。(还原数据库)
(8)利用备份过的mdf,ldf的备份文件还原刚才删除的SPJ数据库。(附加) (9)将SPJ数据库的文件大小修改为100MB。 (10)修改S表,增加一个联系电话的字段sPhoneNo,数据类型为字符串类 型。 2.利用SQL语言创建和删除数据库和数据表(50分,每小题5分) ●数据库和表的要求 数据库名:Student,其中包含三个表:S:学生基本信息表;C:课程基本信息表;SC:学生选课信息表。 ●完成以下具体操作: (1)用SQL语句创建如图2.5-图2.7要求的数据库Student,初始大小为20MB, 最大为100MB,数据库自动增长,增长方式是按10M兆字节增长;日志文件初
Harbin Institute of Technology 机械原理大作业二 课程名称:机械原理 设计题目:凸轮机构设计 姓名:李清蔚 学号:1140810304 班级:1408103 指导教师:林琳
一.设计题目 设计直动从动件盘形凸轮机构,其原始参数见表 1 表一:凸轮机构原始参数 升程(mm ) 升程 运动 角(o) 升程 运动 规律 升程 许用 压力 角(o) 回程 运动 角(o) 回程 运动 规律 回程 许用 压力 角(o) 远休 止角 (o) 近休 止角 (o) 40 90 等加 等减 速30 50 4-5-6- 7多 项式 60 100 120
二.凸轮推杆运动规律 (1)推程运动规律(等加速等减速运动) 推程F0=90° ①位移方程如下: ②速度方程如下: ③加速度方程如下: (2)回程运动规律(4-5-6-7多项式) 回程,F0=90°,F s=100°,F0’=50°其中回程过程的位移方程,速度方程,加速度方程如下:
三.运动线图及凸轮线图 本题目采用Matlab编程,写出凸轮每一段的运动方程,运用Matlab模拟将凸轮的运动曲线以及凸轮形状表现出来。代码见报告的结尾。 1、程序流程框图 开始 输入凸轮推程回 程的运动方程 输入凸轮基圆偏 距等基本参数 输出ds,dv,da图像 输出压力角、曲率半径图像 输出凸轮的构件形状 结束
2、运动规律ds图像如下: 速度规律dv图像如下: 加速度da规律如下图:
3.凸轮的基圆半径和偏距 以ds/dfψ-s图为基础,可分别作出三条限制线(推程许用压力角的切界限D t d t,回程许用压力角的限制线D t'd t',起始点压力角许用线B0d''),以这三条线可确定最小基圆半径及所对应的偏距e,在其下方选择一合适点,即可满足压力角的限制条件。 得图如下:得最小基圆对应的坐标位置O点坐标大约为(13,-50)经计算取偏距e=13mm,r0=51.67mm.
南昌大学“卓越工程师教育培养计划”进展情况报告 南昌大学是教育部批准的全国首批实施“卓越工程师教育培养计划”(以下简称“卓越计划”)的61所高校之一。为贯彻落实党的十七大关于走中国特色新型工业化道路、建设创新型国家、建设人力资源强国等战略部署和《国家中长期教育改革和发展规划纲要(2010-2020年)》,大力推进我校高等工程教育改革,切实提高人才培养质量,结合当前社会经济发展和我校在工程教育方面取得的经验和优势,我校先后召开了校长办公会、人才培养模式研讨会、相关工科学院“卓越计划”专题研讨会,并邀请行业、企业代表共商大计。目前,我校“卓越计划”的实施正稳步进行,进展顺利。主要做法有: 一、召开各类研讨会 为了实施好“卓越计划”,学校分管教学副校长带领教务处及专家组先后多次到学院调研专业情况和教学情况。9月27日,分管副校长带领教务处有关人员到机电学院调研实践教学情况,明确指示要抓好有利时机,利用专业优势,切实加强与省内知名汽车企业(江玲)友好合作,加快建设实践基地,为学生提供实践的平台和机会,为“卓越计划”打好坚实基础。10月17日,学校邀请了工科学院相关行业企业的专家、代表召开了南昌大学“卓越计划”研讨会,与会人员就如何实施“卓越计划”,实施过程中存在的问题和难点等进行了热烈的讨论,与会者一致认为,校企双方要乘“卓越计划”的东风,进一步加强合作,做到合作双赢。同时,也只有做到合作双赢,“卓越计划”才能顺利实施。11月15日,分管副校长带领专家组和其它申报“卓越计划”的负责人,来到机电学院检查实施“卓越计划”专业的整体建设情况。在听取和研讨了专业建设问题后,要求申报单位抓紧时间,针对各自专业在实施该计划中存在的不足,加快建设,特别是合作企业的选定和培养基地建设要尽快落实。
《数据库原理》实验报告 题目:实验一 数据库和表的创建与管理 学号 班级日期 2014302692 孟玉军10011402 16.10.12 1.利用图形用户界面创建,备份,删除和还原数据库和数据表(50分,每小题5 分) ●数据库和表的要求(第五版教材第二章习题6要求的数据库) 数据库名:SPJ,其中包含四表:S表, P表, J表, SPJ表 ●完成以下具体操作: (1)创建SPJ数据库,初始大小为 10MB,最大为50MB,数据库自动增长,增长方 式是按5%比例增长;日志文件初始为2MB,最大可增长到5MB,按1MB增 长。数据库的逻辑文件名和物理文件名均采用默认值。 (2)在SPJ数据库中创建如图2.1-图2.4的四表(只输入一部分数据示意即可)。 S表: P表: J表:
SPJ表: (3)备份数据库SPJ(第一种方法):备份成一个扩展名为bak的文件。(提示: 最好先删除系统默认的备份文件名,然后添加自己指定的备份文件名) (4)备份数据库SPJ(第二种方法):将SPJ数据库定义时使用的文件(扩展名为 mdf,ldf的数据文件、日志文件等)复制到其他文件夹进行备份。 原位置: 新的位置: (5)删除已经创建的工程项目表(J表)。 (6)删除SPJ数据库。(可以在系统默认的数据存储文件夹下查看此时SPJ数据 库对应的mdf,ldf文件是否存在) 删除过后文件不存在 (7)利用备份过的bak备份文件还原刚才删除的SPJ数据库。(还原数据库)
(8)利用备份过的mdf,ldf的备份文件还原刚才删除的SPJ数据库。(附加) (9)将SPJ数据库的文件大小修改为100MB。 (10)修改S表,增加一个联系的字段sPhoneNo,数据类型为字符串类型。 2.利用SQL语言创建和删除数据库和数据表(50分,每小题5分) ●数据库和表的要求 数据库名:Student,其中包含三个表:S:学生基本信息表;C:课程基本信息表;SC:学生选课信息表。 ●完成以下具体操作: (1)用SQL语句创建如图2.5-图2.7要求的数据库Student,初始大小为20MB, 最大为100MB,数据库自动增长,增长方式是按10M兆字节增长;日志文件初
卓越工程师教育培养计划 工作方案
2011年5月 目录 一、前言 (2) 二、指导思想 (3) 三、培养目标 (3) 四、培养体系 (4) 1、试点范围与规模 (4) 2、选拔方式 (5) 3、培养模式 (5) 4、竞争机制 (6) 5、专业培养 (6) 6、学生管理 (6) 7、学籍管理 (6) 五、培养方案和课程体系设计 (7) 1、培养目标和要求 (7) 2、教学计划 (7) 3、课程体系 (7) 4、教学模式 (8) 5、实践环节 (8) 6、考核方式 (9)
六、校企合作模式 (9) 七、组织管理体系 (10) 1、组织结构 (10) 2、经费保障 (11) 3、资源保障 (11) 4、教学管理 (11) 5、师资队伍建设 (12) 八、区域内的大中型企业 (12) 一、前言 高等教育肩负“科教兴国”的历史使命,必须主动为建设创新型国家、走中国特色新型工业化道路提供有力的人才支撑和技术服务。根据国家发展战略,为更好地发挥我校高等工程教育的优势,着力培养“品德优良、基础扎实、素质高、能力强,具有创新精神”的多种类型高质量工程技术人才,特制订西南科技大学“卓越工程师教育培养计划”(以下简称“卓越计划”)工作方案。 西南科技大学是以工学为主的多科性学校,现有在校研究生和普通本专科学生2.7万余人。在工学、农学、理学、经济学、法学、文学、管理学、教育学等8大学科门类,设有67个本科专业、 34个硕士学位授权点、12个工程硕士授权领域。有1个国家级重点实验室培育基地、1个国防重点学科实验室、2个部省共建教育部重点实验室、7个省级重点实验室、1个国家级实验教学示范中心、6个省级实验教学示范中心、与董事单位共建共享实验室17个。经过长期的探索与实践,学校已经成为“建材、机械制造、电子信息、土建、地质、采矿、农业等行业的工程师摇篮”,培养出一大批杰出人才及业务骨干,具有“基础知识扎实,动手能力强,有吃苦耐劳精神和团结协作的工作作风”。抗震救灾期间,在心理援助,建筑检测、环境监测,重大设备应急处置等方面发挥积极作用。 半个多世纪以来,学校扎根西部,坚持开放办学,不断深化办学体制改革,
西工大2020年4月《机电一体化基础》作业机考参考答案 试卷总分:100 得分:88 要答案:wangjiaofudao 一、单选题(共50 道试题,共100 分) 1.CIMS即()。 A.柔性制造单元 B.柔性制造系统 C.计算机集成制造系统 D.传动精度系统 正确答案:C 2.光栅传感器的莫尔条纹明暗变化一个周期,说明光栅移动了()。 A.3/4栅距 B.1/2栅距 C.1/4栅距 D.一个栅距 正确答案:D 3.脉冲当量指的是对应于每个脉冲的()。 A.滚珠丝杠转过的角度 B.工作台的位移量 C.电动机转过的角度 D.机床的切削用量 正确答案:B 4.齿差调整法中滚珠丝杠螺母副的齿轮齿数分别为Z1=99,Z2=100,丝杠螺距L=6mm,则当螺母同向转过一个齿时,其相对轴向位移为()。 A.0.001mm B.0.009mm C.0.006mm D.0.005mm 正确答案:C 5.已知双波传动谐波齿轮的柔齿轮数为200,当刚轮固定时欲得到100的减速比,刚轮齿数应为()。 A.2 B.198 C.202 D.0 正确答案:
6.机电一体化的所谓“三A革命”是工厂、()、家庭自动化。 A.办公 B.计算机 C.打印机 D.显示器 正确答案: 7.半闭环控制系统的传感器装在()。 A.电机轴或丝杠轴端 B.机床工作台上 C.刀具主轴上 D.工件主轴上 正确答案: 8.机电一体化机械进给系统采用齿轮传动副时,应该有消隙措施,其消除的是()。 A.齿轮轴向间隙 B.齿顶间隙 C.齿侧间隙 D.齿根间隙 正确答案: 9.细分技术就是在莫尔条纹变化一周期内,不只是输出一个脉冲,而是输出若干个脉冲以提高()。 A.分辨率 B.电流速 C.涡流传感速 D.合格率 正确答案: 10.进给伺服系统对()不产生影响。 A.进给速度 B.运动位置 C.加工精度 D.主轴转速 正确答案: 11.某步进电机三相单三拍运行时步距角为60,三相六拍运行时步距角为()。 A.10 B.20
机械原理大作业(二) 作业名称:机械原理 设计题目:凸轮机构设计 院系:机电工程学院 班级: 设计者: 学号: 指导教师:丁刚陈明 设计时间: 哈尔滨工业大学机械设计
1.设计题目 如图所示直动从动件盘形凸轮机构,根据其原始参数设计该凸轮。 表一:凸轮机构原始参数 序号升程 (mm) 升程运动 角(o) 升程运动 规律 升程许用 压力角 (o) 回程运动 角(o) 回程运动 规律 回程许用 压力角 (o) 远休止角 (o) 近休止角 (o) 12 80 150 正弦加速 度30 100 正弦加速 度 60 60 50 2.凸轮推杆运动规律 (1)推杆升程运动方程 S=h[φ/Φ0-sin(2πφ/Φ0)]
V=hω1/Φ0[1-cos(2πφ/Φ0)] a=2πhω12sin(2πφ/Φ0)/Φ02 式中: h=150,Φ0=5π/6,0<=φ<=Φ0,ω1=1(为方便计算) (2)推杆回程运动方程 S=h[1-T/Φ1+sin(2πT/Φ1)/2π] V= -hω1/Φ1[1-cos(2πT/Φ1)] a= -2πhω12sin(2πT/Φ1)/Φ12 式中: h=150,Φ1=5π/9,7π/6<=φ<=31π/18,T=φ-7π/6 3.运动线图及凸轮线图 运动线图: 用Matlab编程所得源程序如下: t=0:pi/500:2*pi; w1=1;h=150; leng=length(t); for m=1:leng; if t(m)<=5*pi/6 S(m) = h*(t(m)/(5*pi/6)-sin(2*pi*t(m)/(5*pi/6))/(2*pi)); v(m)=h*w1*(1-cos(2*pi*t(m)/(5*pi/6)))/(5*pi/6); a(m)=2*h*w1*w1*sin(2*pi*t(m)/(5*pi/6))/((5*pi/6)*(5*pi/6)); % 求退程位移,速度,加速度 elseif t(m)<=7*pi/6 S(m)=h; v(m)=0; a(m)=0; % 求远休止位移,速度,加速度 elseif t(m)<=31*pi/18 T(m)=t(m)-21*pi/18; S(m)=h*(1-T(m)/(5*pi/9)+sin(2*pi*T(m)/(5*pi/9))/(2*pi)); v(m)=-h/(5*pi/9)*(1-cos(2*pi*T(m)/(5*pi/9))); a(m)=-2*pi*h/(5*pi/9)^2*sin(2*pi*T(m)/(5*pi/9)); % 求回程位移,速度,加速度
第一学期 [1010010]大学计算机基础[1110011]高等数学(1)[1110070]普通化学 [1310011]大学英语一级[2110011]体育 [2010021]形势与政策[1310210]中国近现代史纲要[2010010]军事理论 [2090010]军训 [1010130]大学计算机基础实验[0520030]机械制图 [2010031]思想道德修养与法律基础第二学期 [1010030]C语言程序设计II [1110051]大学物理(1)[1310012]大学英语二级[0120110]航空航天技术概论[2110012]体育 [2390020]金工实习B(非机类)[2010022]形势与政策[2010032]思想道德修养与法律基础
[1010150]C语言程序设计II实验 [0190110]公益劳动 [1110012]高等数学(2) [1110061]物理实验(1) 2009-2010学年 第一学期 [1110052]大学物理(2) [1110062]物理实验(2) [1310013]大学英语三级 [0120290]矢量分析与场论 [2110013]体育 [0610050]理论力学 [2010023]形势与政策 [0120740]线性代数 [0120750]概率论与数理统计 第二学期 [1310014]大学英语四级 [0120130]流体力学基础 [2110014]体育 [2010024]形势与政策 [1310200]毛泽东思想、邓小平理论和“三个代表”重要思想
[1310240]概论社会实践课 [0520450]电工电子技术 [0590030]制图测绘 [0520500]电工电子技术实验课[0120770]结构强度基础 2010-2011学年 第一学期 [1010080]软件技术I [0120090]空气动力学 [0120190]飞行器性能计算 [0130370]结构强度基础试验 [0120500]复变函数 [0120510]计算方法 [1010200]软件技术I实验 [1310190]马克思主义基本原理[0120640]工程材料 [0190020]认识实习 [0190030]计算机实习 [0520120]机械设计基础 [0130360]流体力学试验 [0120170]弹性力学 [0120760]飞行器结构力学基础
西工大19春《数据库语言》在线作业 试卷总分:100 得分:0 一、单选题(共40 道试题,共100 分) 1.关系数据库系统中所使用的数据结构是()。 A.树 B.图 C.二维表 D.表格 正确答案:C 2.在表单运行中,如复选框变为不可用,其Value属性值为()。 A.1 B.0 C.2或NULL D.不确定 正确答案:B 3.在表单控件中,即可作为接收输入数据用,又能作为编辑现有数据用的控件是()。 A.标签 B.复选框 C.列表框 D.文本框 正确答案:D 4.表单文件的扩展名是()。 A.MNX B.IDX C.SCX D.FXP 正确答案:C 5.关于过程调用的叙述,正确的是()。 A.实参与形参的数量必须相等 B.当实参的数量多于形参的数量时,多余的实参被忽略 C.当形参的数量多于实参的数量时,多余的形参被忽略 D.上面B和C都对 正确答案:A 6.下面是关于表单数据环境的叙述,其中错误的是()。
A.可以在数据环境中加入与表单操作有关的表 B.数据环境是表单的容器 C.可以在数据环境中建立表之间的联系 D.表单自动打开其数据环境中的表 正确答案:B 7.若要确定指定对象内部的背景色,可通过设置()属性来实现。 A.ForeColor B.FillColor C.BackColor D.Color 正确答案:B 8.用DEFINE CLASS 命令定义了一个名为“my_c”的FORM类时,若要为该类添加一个label1标签对象,应当使用的基本代码是()。 A.AddObject(“label1”,””label”) B.MyForm.AddObject(“label1”,””label”) C.Add Object label1 AS label D.Add Object my_https://www.doczj.com/doc/c216701550.html,bel1 AS label 正确答案:C 9.在非嵌套程序结构中,可以使用LOOP和EXIT语句的基本程序结构是()。 A.TEXT-END TEXT B.DO WHILE-ENDDO C.IF-ENDIF D.DO CASE-ENDCASE 正确答案:B 10.打开菜单设计器后,系统菜单将自动增加一个()菜单。 A.常规 B.运行 C.设计 D.菜单 正确答案:D 11.ABC.DBF是一个具有两个备注型字段的数据表文件,使用COPY TO PSQ命令进行复制操作,其结果将()。 A.得到一个新的数据表文件 B.得到一个新的数据表文件和一个新备注文件
主要研究方向 本硕士点下设四个研究方向,均属仪器仪表学科中的重 要研究领域。 1.电磁测量技术与仪器 本方向特色是立足轨道交通领域的安全监测技术、大型 试验台研制与试验研究技术,主要从事测控技术、故障诊断、 信号分析与处理和虚拟仪器领域的应用研究。 2.精密测试与质量工程 本方向主要从事精密检测技术与仪器,智能化机械加工过程 状态监测及故障诊断方面的研究。 3.测试计量理论及其应用 本方向主要从事神经网络测控技术的基本理论与神经网络 智能测试方面研究。结合工程实际,围绕神经网络测试仪器 的设计与开发,及其在智能交通、智能控制、信号与信息处 理的应用等方面展开。 4.现代传感器技术及系统 本方向主要从事现代传感器技术的研究,传感器技术是 本学科的一个重要组成部分。本研究方向紧密围绕轨道交通 安全检测技术,尤其是传感器技术方面展开。 精密仪器及机械 排学校名称等排学校名称等排学校名称等级
名级名级名 1 北京航空航天 大学 A + 4 重庆大学 A 7 天津大学 A 2 哈尔滨工业大 学 A + 5 大连理工大 学 A 8 中国科学 技术大学 A 3 清华大学 A 6 上海交通大 学 A 9 西安交通 大学 A B+等(15个):武汉大学、华中科技大学、浙江大学、东南大学、西北工业大学、厦门大学、北京理工大学、合肥工业大学、中北大学、哈尔滨工程大学、长春理工大学、南京航空航天大学、南京理工大学、哈尔滨理工大学、上海理工大学 B等(15个):电子科技大学、西安电子科技大学、广东工业大学、四川大学、西安理工大学、吉林大学、上海大学、西南交通大学、燕山大学、西安工业大学、河北工业大学、山东科技大学、南昌大学、华东交通大学、青岛科技大学
软件工程:是应用计算机科学、数学及管理科学等科学知识和技术原理,借鉴传统工程的原则、方法来创建软件,从而达到提高质量,降低成本的目的。 7 数据库应用程序 生存期阶段 收集的数据生成的文档 数据库规划数据库项目的目标和任务数据库应用程序的任务陈述和任务目标 系统定义描述主要用户视图定义数据库应用程序的分为和边界;定义 要支持的用户视图 需求收集和分析用户视图和系统需求用户和系统需求说明书 数据库设计验证逻辑数据库设计的用户反 映;目标DBMS提供的功能; 概念/逻辑数据库设计;物理数据库设计 应用程序设计用户对界面设计的反映应用程序设计 DBMS选择目标DBMS提供的功能DBMS的评估和推荐 建立原型用户对系统原型的反响改进的用户需求和系统需求说明书 实现目标系统提供的功能 数据转换和加载当前数据的格式;目标DBMS 的数据导入性能 测试测试结果采用的测试策略;测试结果分析 运行维护性能测试结果;用户和系统需求 的增加和变化用户手册;性能分析;改变的用户需求和系统说明书 10 实体/联系映射 强实体创建包含所有简单属性的的关系 弱实体创建包含所有简单属性的关系(主关键字等到每个 主实体的联系映射后再确定) 1∶*二元联系将一方实体的主关键字处理为表示多方实体关系的 外部关键字 1∶1二元联系 (a)双方强制参与组合为一个实体 (b)一方强制参与将“可选”方实体的主关键字处理为表示“强制” 方实体关系的外部关键字 (c)双方可选参与无进一步消息任选 超类/子类联系参照超类/子类映射表 *∶*二元联系、复杂联系创建一个关系表示该联系,该关系包含该联系的所 有属性。参与联系的所有实体的主关键字作为该关 系的外部关键字 多值属性创建一个新关系表示多值属性,并将主实体的主关 键字作为该关系的外部关键字 8
化学工程与工艺(卓越工程师) 2010级培养方案 一、培养目标 本专业培养适应经济全球化和我国社会主义现代化建设需要、德智体全面发展,具有良好的 基础理论、实验技能、外语和计算机应用能力,掌握化学工程与化学工艺方面的系统知识,获得 化工工程师基本训练,具有开拓创新意识和进行产品开发和设计的能力,以石油和天然气加工为 特色,能在炼油、化工、能源、环保和军工等部门从事工程设计、技术开发、生产过程的控制、 化工过程软件开发、生产技术管理和科学研究等方面工作的国际化工程技术人才。 二、业务要求 化学工程与工艺专业学生在学习数学、物理、化学、外语、计算机等课程的基础上,主要学习 物理化学、单元操作、化学反应工程及化工热力学等基础理论知识。受到化学与化工实验技能、工 程实践、计算机应用、科学研究与工程设计方法的基本训练。本专业不仅是通用的过程工程学科, 而且是高新科技和新兴工业的重要支撑学科。实验班学生培养注重过程工程和产品工程,特别是石 油和天然气加工过程中的过程工程和产品工程两个方面的均衡发展,并以通用过程工程为主线培养,营造应用型工程师培养的良好基础。毕业生应获得以下几方面的知识和能力: (1)具有良好的文化素质、道德修养和高度的社会责任感, (2)掌握化学工程、化学工艺、应用化学等学科的基本理论和基本知识; (3)掌握化工装置工艺与设备设计方法,掌握化工过程模拟优化方法; (4)具有对新产品、新工艺、新技术和新设备进行研究、开发和设计的初步能力; (5)熟悉国家对化工生产、设计、研究与开发、环境保护等方面的方针、政策和法规; (6)了解化学工程学的理论前沿,了解新工艺、新技术与新设备的发展动态; (7)掌握文献检索、资料查询的基本方法,具有一定的科学研究和实际工作能力; (8)具有创新意识和独立获取新知识的能力。 三、主干学科和学位课程 主干学科:化学工程与技术 学位课程:高等数学、基础外语、大学物理、中国化马克思主义、无机及分析化学、有机化 学、程序设计语言(C)、物理化学、化工原理、化工热力学、化学反应工程、石油炼制工程。
(单选题)1: 自功率谱密度函数为( )函数。 A: 实奇 B: 实偶 C: 虚奇 D: 虚偶 满分: (单选题)2: 输出信号与输入信号的相位差随频率变化的关系称()。 A: 幅频特征 B: 幅频特征 C: 传递函数 D: 频响函数 满分: (单选题)3: 电阻应变式传感器是利用金属的()将被测机械量转换成()。 A: 电阻应变效应电阻变化 B: 压电效应电压变化 C: 热电效应电流变化 D: 热阻效应电阻变化 满分: (单选题)4: 通常用于制作霍尔元件的材料是()。 A: 绝缘体 B: 半导体 C: 导体 D: 塑料片 满分: (单选题)5: 光敏电阻由于吸收了光量子能量,使得()增加,导致电导率增加。 A: 载流子温度 B: 载流子浓度 C: 载流子寿命 D: 载流子迁移率 满分: (单选题)6: 压电式传感器是利用某些物质的()而工作的。 A: 压阻效应 B: 压电效应 C: 热电效应 D: 磁电效应 满分: (单选题)7: 压电材料按一定方向放置在交变电场中,其几何尺寸将随之发生变化,这称之为()。
A: 压电效应 B: 压阻效应 C: 压磁效应 D: 逆压电效应 满分: (单选题)8: 热电偶产生的热电势中的接触电势和温差电势由()产生。 A: 温度不同、自由电子的密度不同 B: 自由电子速度不同、温度不同 C: 自由电子的密度不同、温度不同 D: 温度不同、自由电子速度不同 满分: (单选题)9: 用二阶系统作测量装置时,影响幅值测量误差大小的参数有()。A: 时间常数 B: 灵敏度 C: 固有频率和阻尼度 D: 回程误差 满分: (单选题)10: 测试装置的响应与脉冲响应函数和输入之间的关系为()。 A: 卷积 B: 傅氏变换对 C: 乘积 D: 不确定 满分: (单选题)11: 压电式传感器属于()型传感器。 A: 参量型 B: 发电型 C: 电感型 D: 电容型 满分: (单选题)12: 变间距式电容传感器适用于测量微小位移是因为()。 A: 电容量微弱,灵敏度太低 B: 传感器灵敏度与间距平方成反比,间距变化大则非线性误差大 C: 需要做非接触测量 满分: (单选题)13: 同频、同相位的正弦信号与方波信号作互相关其结果为()信号。A: 正弦 B: 同频正弦 C: 方波
机械原理大作业二 课程名称: _______ 设计题目: 凸轮机构设计 院 系: ------------------------- 班 级: _________________________ 设计者: ________________________ 学 号: _________________________ 指导教师: ______________________ 哈尔滨工业大学 Harbin I nstituteof Techndogy
设计题目 如右图所示直动从动件盘形凸轮机构,选择一组凸轮机构的原始参数, 据此设计该凸轮机构。 凸轮机构原始参数 二.凸轮推杆升程、回程运动方程及推杆位移、速度、加速度线图 凸轮推杆升程运动方程:冷3唱—亦(中] 156 12 .. v 」1 - cos()] 兀1 5 374.4 2 12 ? a 1si n( ) 兀 1 5 % t 表示转角, s 表示位移 t=0:0.01:5*pi/6; %升程阶段 s= [(6*t)/(5*pi)- 1/(2*pi)*si n(12*t/5)]*130; hold on plot(t,s);
t= 5*pi/6:0.01:pi; %远休止阶段 s=130; hold on plot(t,s); t=pi:0.01:14*pi/9; %回程阶段 s=65*[1+cos(9*(t-pi)/5)]; hold on plot(t,s); t=14*pi/9:0.01:2*pi; %近休止阶段 s=0; hold on plot(t,s); grid on % t表示转角,令3 1=1 t=0:0.01:5*pi/6; %升程阶段v=156*1*[1-cos(12*t/5)]/pi hold on plot(t,v); t= 5*pi/6:0.01:pi; %远休止阶段
序号考生编号姓名拟录取专业1106999611212268吴迎超航空器结构与适航技术2106999321115218安昊固体力学3106999611212246杜鹏固体力学4106999611212238邓智伦固体力学5106999611212265杨亚辉固体力学6106999514517189王宝生固体力学7106999611212234李锦涛固体力学8106999611212245高李潇远固体力学9106999611212247彭畅固体力学10106999611212243王永帅固体力学11106999611212262文漪婷固体力学12106999611212264杨建固体力学13106999106996001曹俊超固体力学14106999106996002吴倩固体力学15106999106996003王昭惠固体力学16106999106996004张一帆固体力学17106999106996005郭怡东固体力学18106999103596006申思雨固体力学19106999102476007鲁义凡固体力学20106999106996008关天豪固体力学21106999106996009李易航固体力学22106999106996010周晓宸固体力学23106999106996011杨磊峰固体力学24106999106996012李建固体力学25106999106996013苏鑫固体力学26106999104596014黄文淇固体力学27106999106996015顾佳辉固体力学
序号考生编号姓名拟录取专业28106999104596016冯俊颖固体力学29106999106996017向华波固体力学30106999106996018陈小鹏固体力学31106999106996019江斌固体力学32106999106996020宋若云固体力学33106999106996022周典固体力学34106999106996023何志恒固体力学35106999106996024谢富佩固体力学36106999107306025汪庆渝固体力学37106999106996026胡慕秋固体力学38106999106996027彭艺琳固体力学39106999611212142张宇哲流体力学40106999611212143徐梓铭流体力学41106999611212138丁钰良流体力学42106999611212153耿晓强空气动力学43106999611212135查章铭流体力学44106999214514884李全铮流体力学45106999611212139王雪鹤流体力学46106999611212141柴乐毅流体力学47106999611212145厉国安流体力学48106999611212148惠伟伟流体力学49106999231715047高奕博流体力学50106999611212136李海洋流体力学51106999611212146孙博流体力学52106999611212137李响流体力学53106999611212140杨思睿流体力学54106999611212158谢睿轩空气动力学
复习题 1.对于带宽为8kHz的信道,若有8种不同的物理状态来表示数据,信噪比为 30db,按奈氏定理,最大限制的数据速率是多少?按香农定理,最大限制的数据速率是多少? ①C=2 F log2N=2*8K*log28=48Kbps ②分贝(dB)的计算是:10lgS/N 即 本题为:10lgS/N=30 则:S/N=103 C=F log2(1+S/N)=8K*log21001=80Kbps 2.在数据链路层实现帧同步的方法中有“使用比特填充的首尾标志方法”,比 如用01111110来标志帧的开始和结束,但帧数据段中也会有01111110这样的数据,请给出发送方和接收方各自的处理方法? 可以采用“0比特插入法”来解决。该法在发送端监视除标志码以外的所有字段,当发现有连续5个“1”出现时,便在其后添插一个“0”,然后继续发后继的比特流。在接收端,同样监除起始标志码以外的所有字段。当连续发现5个“1”出现后,若其后一个比特“0”则自动删除它,以恢复原来的比特流;若发现连续6个“1”,则可能是插入的“0”发生差错变成的“1”,也可能是收到了帧的终止标志码。后两种情况,可以进一步通过帧中的帧检验序列来加以区分。这种方法也称作"比特填充的首尾标志法"。 3.简述载体侦听多路访问/冲突检测(CSMA/CD)技术的工作原理? CSMA/CD载波监听/冲突检测,属于计算机网络以太网的工作类型,即在总线上不段的发出信号去探测线路是否空闲,如果不空闲则随机等待一定时间,在继续探测。直到发出型号为止 CSMA/CD的工作原理 由IEEE 802.3标准确定的CSMA/CD检测冲突的方法如下: (1)当一个站点想要发送数据的时候,它检测网络查看是否有其他站点正在传输,即监听信道是否空闲。 (2)如果信道忙,则等待,直到信道空闲;如果信道闲,站点就传输数据。 (3)在发送数据的同时,站点继续监听网络确信没有其他站点在同时传输数据。因为有可能两个或多个站点都同时检测到网络空闲然后几乎在同一时刻开始传输数据。如果两个或多个站点同时发送数据,就会产生冲突。 (4)当一个传输节点识别出一个冲突,它就发送一个拥塞信号,这个信号使得冲突的时间足够长,让其他的节点都能发现。 (5)其他节点收到拥塞信号后,都停止传输,等待一个随机产生的时间间隙(回退时间,Backoff Time)后重发。 从以上叙述可以看出,CSMA/CD的工作原理可用四个字来表示:“边听边说”,即一边发送数据,一边检测是否产生冲突。 4.香农(Shannon)定理指出,有噪声信道的最大数据速率可由下面的公式计 算:C=Wlog2(1+S/N)其中,W为信道带宽,S为信号的平均功率,N为噪声平均功率,S/N叫做信噪比(单位为分贝dB)。对于带宽为4000Hz的信
H a r b i n I n s t i t u t e o f T e c h n o l o g y 大作业设计说明书 课程名称:机械原理 设计题目:凸轮机构 院系:机电学院 班级: 姓名: 学号: 指导教师:丁刚 设计时间: 哈尔滨工业大学 1.设计题目 2.运动方程式及运动线图 由题目要求凸轮逆时针旋转 (1)确定凸轮机构推杆升程、回程运动方程,并绘制推杆位移、速度、加速度线图。升程第一段:(0 <φ< pi /4)φ0=pi/2; s1 = 73*φ^2; v1=146*w*φ; a1 = 146*w^2;
升程第二段:(pi/4 <φ< pi /2) s2 =90-73*(pi/2-φ)^2; v2=146*w*( pi/2-φ); a2 =-146*w.^2; 远休止程:(pi/2 <φ< 10*pi/9) s3 = 90; v3 = 0; a3 = 0; 回程:(10*pi/9)< φ< ( 14*pi/9) s4 =45*(1+cos(9/4*(φ-10*pi/9))); v4 =*w*sin(9/4*(φ-10*pi/9)) ; a4 =*w^2* cos(9/4*(φ-10*pi/9)); 近休止程:(14*pi/9)< φ < ( 2*pi); s5 =0; v5 =0; a5 =0; 1.由上述公式通过编程得到位移、速度、加速度曲线如下:(编程见附录). 2. 凸轮机构的线图及基圆半径和偏距的确定 凸轮机构的线图如下图所示(代码详见附录): 因为凸轮逆时针旋转,,所以滚子从动件右偏,但由于绘图原因,采用向左为正方向,由此 确定凸轮基圆半径与偏距: 基圆半径为r0 = (50^2+100^2)=112mm,偏距e = 50mm。 3.凸轮实际轮廓,理论轮廓,基圆,偏距圆绘制