智能循迹/避障小车研究
工作报告
一、智能循迹小车程序结构框图
二、Proteus仿真图
三、软件程序设计
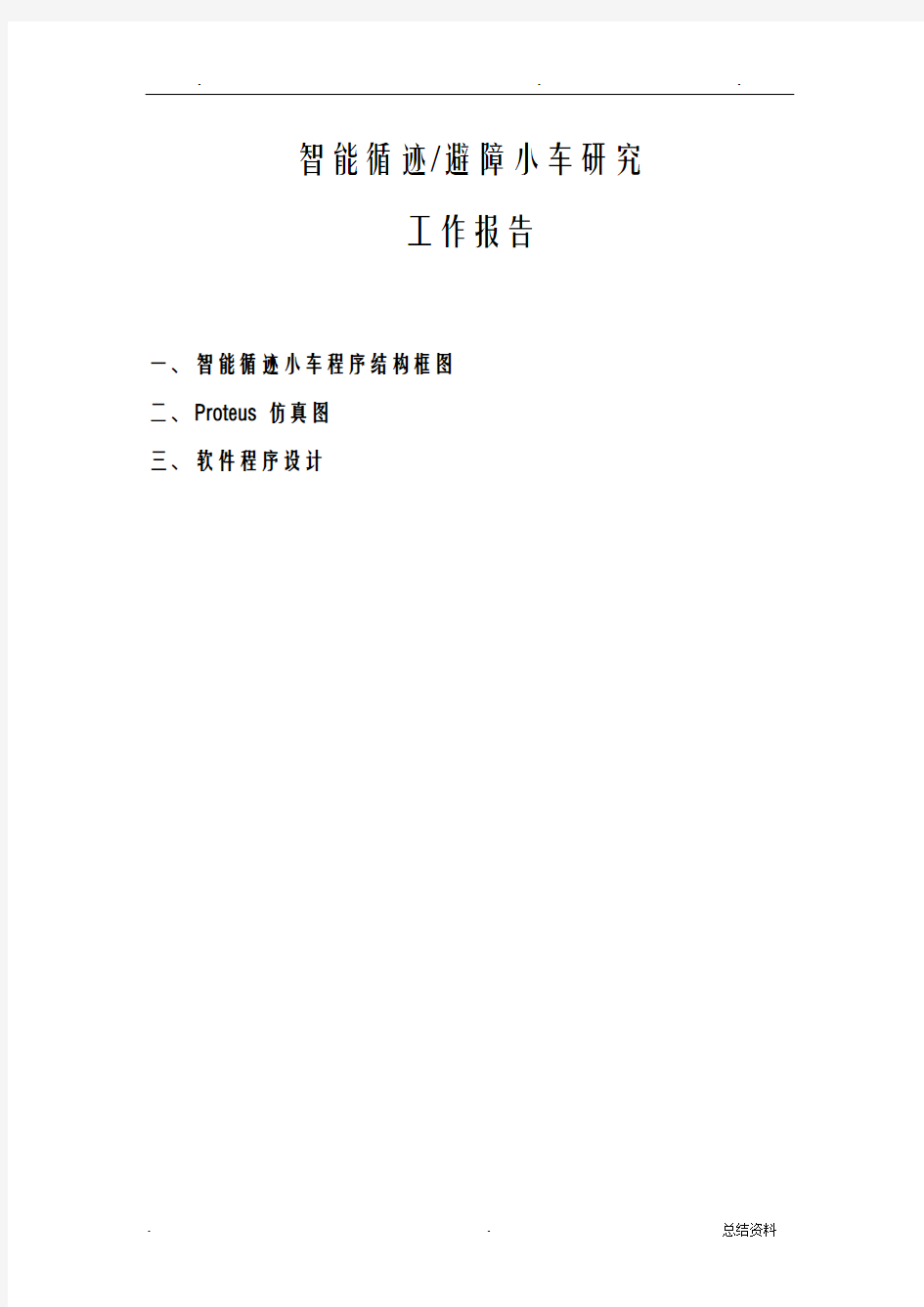
一、智能循迹小车程序结构框图
经过几天在网上的查找,对智能循迹/避障小车有了大致的了
解,
一般有三个模块:
1、最基本的小车驱动模块,使用两个二相四线步进电机对小车的两个后轮分别进行驱动,前轮最好用万向轮,能使小车更好地转弯;
2、小车循迹模块,在小车底部有三个并排安装的红外对管,对黑色与白色的反射信号不同,经单片机处理后对小车进行相应处理;
3、避障模块,我写的程序中对于避障模块是用中断来处理的(即安装在小车车头的红外对管检测到有障碍物后,就会向单片机的P3_2口输出一个高电平或是低电平,这时中断程序将对小车进行预先设定好的避障处理),但是在程序结构框图中,我不太会表示中断处理方式,所以就用查询的方式画了。
Y
停止
二、Proteus仿真图
我用Proteus大概地仿真了小车的运行状态。图中的两个二相四线步进电机就代表小车的左右轮(假定步进电机顺时针转动方向为小车前进方向),网上有很多种驱动芯片,在仿真时我只使用L298N芯片来驱动步进电机。用三个单刀双制开关模拟用于小车循迹的三个红外对管的输出信号,经一个与门与三极管开关连接到P3_3口,中断程序对P1_0, P1_1, P1_2三个口进行检测,并做出相应处理。同时因为避障模块的优先级高于循迹模块,所以将外部中断0用于避障,外部中断1用于循迹。P1_3口则用于检测小车是否到达终点。
1、小车驱动模块:
使用一片298芯片驱动一个二相四线步进电机,电机的电压为12V。
2、小车循迹模块:
左边为三个单刀双制开关模拟小车循迹使用的红外对管的输出信号,经一个与门和三极管开关送至P3_3口,有P1_4口定时响应中断程序。又经或门送至P1_3口(图因找不到或门,所以用7411和7404代替),检测小车是否到达终点.
3、避障模块:(用一个开关代替车头红外对管的输出信号)
4、仿真结果:
根据两个步进电机的转动情况,小车可以按照预先设计好的程序进行循迹(转弯,直走),避障处理,最后停止前进。
三、软件程序设计
#include
#define uchar unsigned char
sbit P1_2=P1^2; //P1口的低三位作为小车循迹的三个红外对管与单片机的信号接口
sbit P1_0=P1^0;
sbit P1_1=P1^1;
sbit P1_3=P1^3; //三个循迹的红外对管输出口经或门后的结果与P1_3接,用于实时检测sbit P1_7=P1^7; //控制两个二相四线步进电机的启动与停止
sbit P1_6=P1^6;
sbit P1_4=P1^4; //为循迹中断所用的定时/计数器0输出口
uchar i,j,ms;
uchar dianji[]={0x11,0x22,0x44,0x88}; //电机的转动使小车前进
uchar back[]={0x88,0x44,0x22,0x11}; //电机的转动使小车后退
void delay(int z) //延时程序
{
int x,y;
for(x=0;x for(y=0;y<500;y++); } void goahead() //小车前进程序,一个循环使小车的车轮转动一周 { P1_6=1; P1_7=1; for(i=0;i<4;i++) { P2=dianji[i]; delay(50); } } void turnleft() //小车左转程序,小车采用两个步进电机驱动,分别控制小车左右{ 两个车轮的转动。小车左转时,左边的电机停止转动,右边的电机P1_6=0; 仍然转动,即实现小车的左转动作;反之则是小车的右转动作 P1_7=1; for(i=0;i<4;i++) P2=dianji[i]; delay(50); } } void turnright() //小车右转程序 { P1_6=1; P1_7=0; for(i=0;i<4;i++) { P2=dianji[i]; delay(50); } } void qianjin() //小车前进程序,此程序是为小车遇到障碍时进行躲避处理时小车前{ 进程序,一个循环小车的车轮转动三周 P1_6=1; P1_7=1; for(j=0;j<3;j++) { for(i=0;i<4;i++) { P2=dianji[i]; delay(50); } } } void goback() //小车后退程序,此程序也是小车避障环节中的为小车后退的程序,{ 一个循环,小车的车轮向后转动三周 P1_6=1; P1_7=1; for(j=0;j<3;j++) { for(i=0;i<4;i++) { P2=back[i]; delay(50); } } } void main(void) //主程序 { TMOD=0x01; //为循迹中断时,设置了一个定时/计数器0,使得循迹中断会定时被响应TH0=(65536-50000)/256; //设置定时/计数器的初值 TL0=(65536-50000)%256; TR0=1; //开启定时/计数器0 IE=0x87; //打开T0,INT0,INT1的中断 IT0=1; //两个外部中断的中断触发方式 IT1=1; P1_4=0; //设定初值 ms=0; while(P1_3) //场地为白纸黑线,红外对管发射接收后,若为黑色则向单片机输出低电{ 平,若为白色则输出高电平。三个红外对管接一个或门后到P1_3口,只goahead(); 要有一个对管检测到白线,小车就一直向前走。场地的终点为一条与循} 迹线路相垂直的黑线,若三个对管都检测到黑线,即输出都为低电平,P1_6=0; 此时跳出循环,关闭两个步进电机,小车停止运行。 P1_7=0; } void time0() interrupt 0 //避障中断处理程序。在小车车头安装一个或是两个红外对 { 管,用于检测循迹轨道上的障碍物。若有障碍物出现则红外P1_6=0; 对管向单片机的P3_2口输出低电平,做出相应处理。 P1_7=0; //先关闭两个步进电机,使其正转与反转之间有一个缓冲时间goback(); //后退,左转,前进,右转,前进,右转,直走 turnleft(); qianjin(); turnright(); qianjin(); turnright(); goahead(); } void tt_0() interrupt 2 //循迹中断程序。由于安装在小车下面的三个红外对管会长时间地保 持一个电平不变,若直接将此信号经与门连接到P3_3口时,中 断程序只执行一次便不再继续响应,所以我加了一个三极管开 关。这样隔一段时间三极管导通,将信号传送到P3_3口。由定 时器设定每100ms导通三极管一次,将三个用于循迹的对管的 输出经或门后送到P3_3口。 { if(P1_0==0&&P1_2==1) //若左边红外管输出为低电平,右边的为高电平,则左转turnleft(); if(P1_0==1&&P1_2==0) //若左边红外管输出为高电平,右边的为低电平,则右转turnright(); if(P1_0==0&&P1_1==0&&P1_2==0) //若三个都为低电平,则关闭步进电机,小车停止{ P1_6=0; P1_7=0; } } void time_0() interrupt 1 //定时100ms,P1_4口反相 { TH0=(65536-50000)/256; TL0=(65536-50000)%256; ms++; if(ms>=2) { P1_4=!P1_4; ms=0; } }
相关主题
文本预览