坐标转换程序说明
COOD坐标转换4.2版,无需安装,直接运行即可使用,可以实现、空间直角坐标、大地坐标、平面坐标的七参数或四参数转换。
下面以北京1954坐标系(中央子午线经度123°)平面坐标转换为施工工程坐标系(GWS84椭球,中央子午线经度121-44-05,投影大地高40m)坐标为例,说明四参数平面坐标转换的具体步骤。
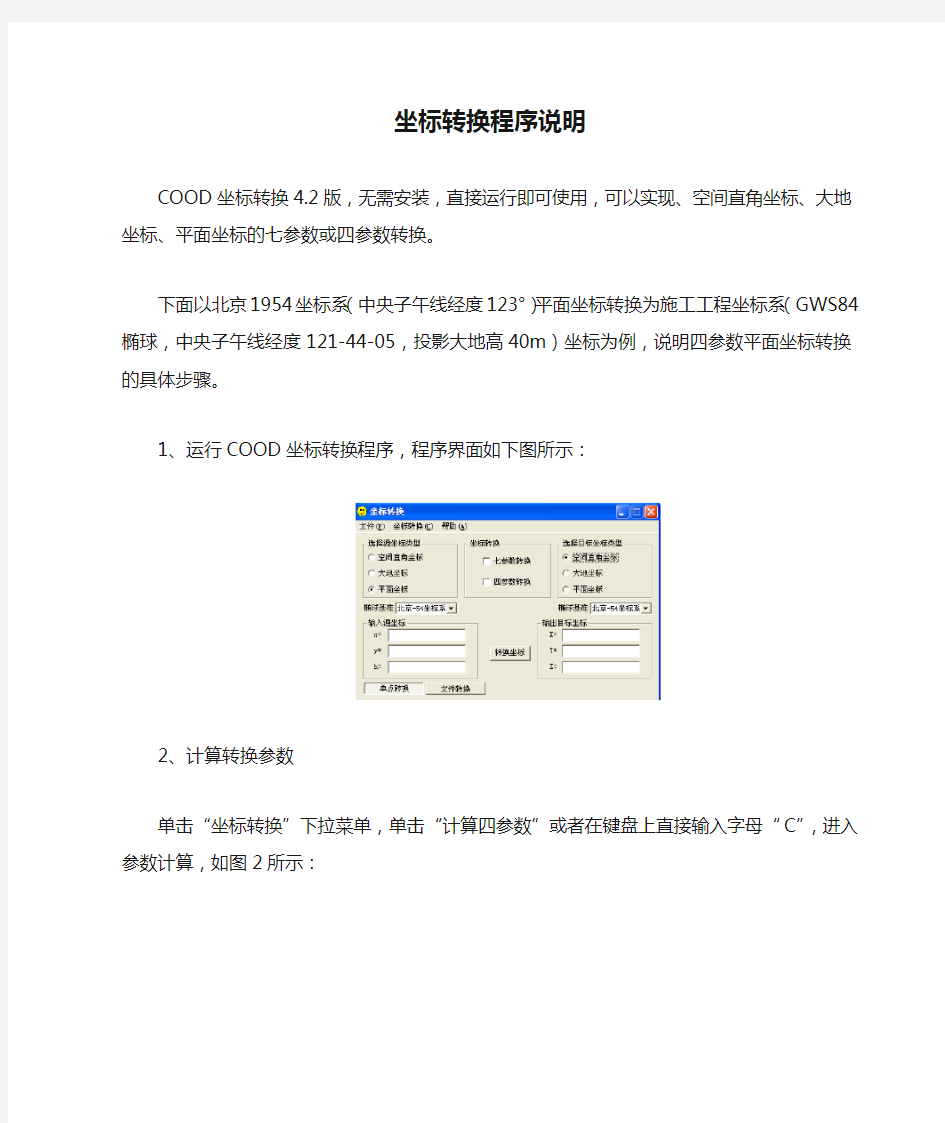
1、运行COOD坐标转换程序,程序界面如下图所示:
2、计算转换参数
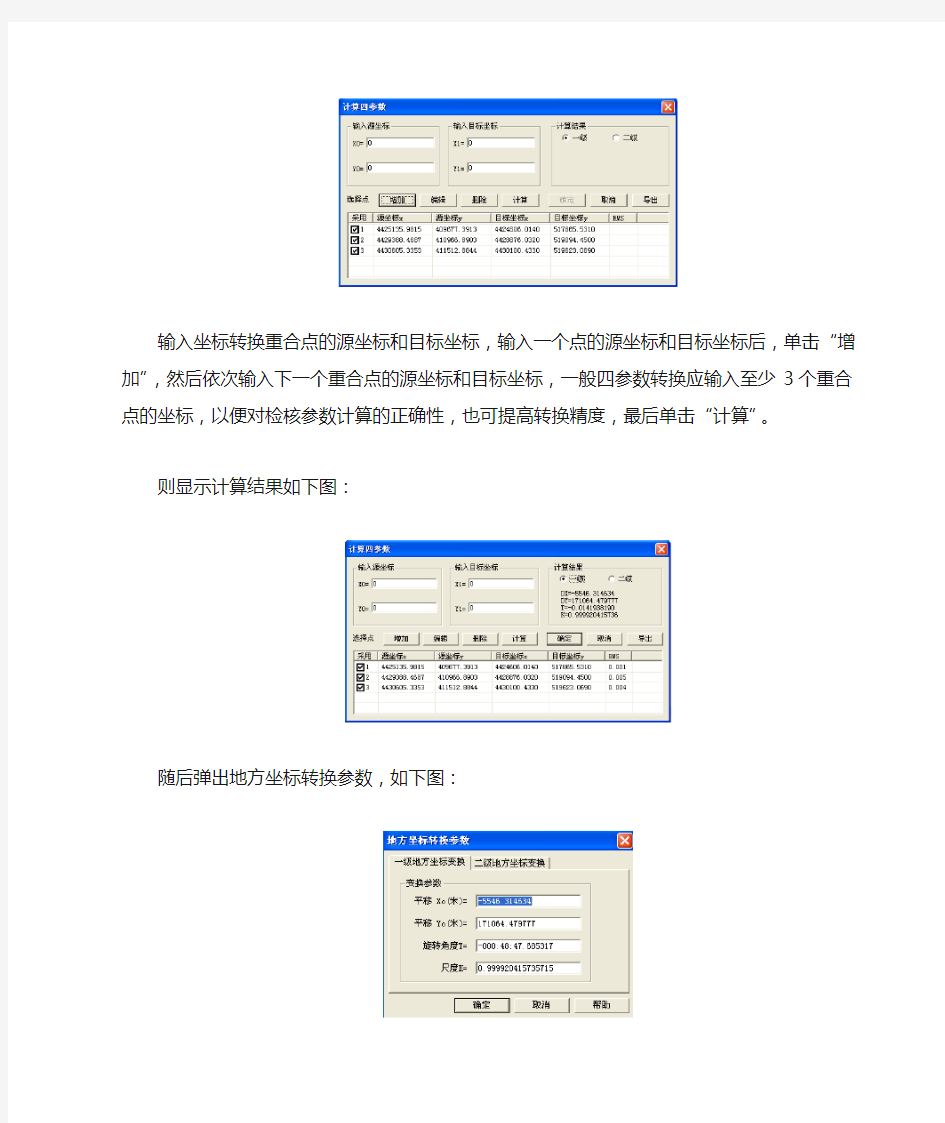
单击“坐标转换”下拉菜单,单击“计算四参数”或者在键盘上直接输入字母“C”,进入参数计算,如图2所示:
输入坐标转换重合点的源坐标和目标坐标,输入一个点的源坐标和目标坐标后,单击“增加”,然后依次输入下一个重合点的源坐标和目
标坐标,一般四参数转换应输入至少3个重合点的坐标,以便对检核参数计算的正确性,也可提高转换精度,最后单击“计算”。
则显示计算结果如下图:
随后弹出地方坐标转换参数,如下图:
单击“确定”,此时四参数计算完成,软件自动将计算的参数作为当前值,并将参数计算结果保存在名为FourResult的文本文件中,查看COOD坐标转换程序的当前目录,找到FourResult文本文件查看转换误差,该例计算结果如下图:
若转换后中误差过大,说明输入的重合点有误,或者重合点误差较大,应重新选择合适的重合点计算转换参数。确认转换参数无误后,然后单击文件菜单,保存转换项目,例如保存为“54北京坐标系与84施工坐标系转换”。
2、坐标转换
首先设置坐标类型和转换参数的类型,源坐标坐标类型为平面坐标,椭球基准为北京-54坐标系,目标坐标类型为平面坐标,椭球基准为WGS-84坐标系,坐标转换参数勾选“四参数转换”如下图所示:
(1)单点坐标转换
设置好坐标类型和转换参数的类型后,直接在对话框中输入一个控制点的源坐标,单击右侧的“转换坐标”按纽,则在右侧“输出目标坐标”框内显示转换后的坐标值,如下图所示:
(2)文件转换
对于少量的坐标可以通过单点转换来实现,但是对于批量坐标的转换就应采用文件转换实现比较方便。
①设置文件格式
单击“文件转换”按纽,弹出如下对话框:
然后单击“自定义格式”,填入格式名称为“54-84”,扩展名可以为txt,以便用文本打开查看,分隔符号选“,”,然后定义数据格式,选中数据列表中的“点号”单击“添加”按纽,依次添加数据列表中的“北方向X”、“东方向Y”后,单击“完成新建”按纽,最后按“确定”,对转换项目进行保存。
②建立转换文件
打开记事本,按照定义的数据格式,将北京1954坐标系123°带坐标按“点名,X,Y”的顺序输入,每个点占一行,所有源坐标输入完后保存为后缀为“.txt”的文本文件,例如文件名保存为“北京1954坐标源数据.txt”。
③文件坐标转换
运行COOD坐标转换程序,单击“文件”菜单,打开保存的“54北京
坐标系与84施工坐标系转换”,单击“文件转换”按纽,弹出如图对话框:
选择数据格式,单击“格式”按纽,弹出如图对话框:
选中新建好的“54-84”文件格式,“转换方式”选“文件名上加1,如File.txt”,确定,如下图:
选择源文件,如下图:
单击“浏览”按纽,找到“北京1954坐标源数据.txt”文件打开,如图:
单击“=>”按纽,弹出下图对话框,双击右侧列表中的文件即可查看转换结果,结果保存在“北京1954坐标源数据1.txt”中。
退出COOD坐标转换程序,保存转换项目。
如果以后还要进行本项目坐标转换,直接在“北京1954坐标源数
据.txt”中按格式要求添加源坐标,然后在COOD转换软件中打开54北京坐标系与84施工坐标系转换”项目即可直接进行文件转换,无需重复设置和计算转换参数。
项目经理部精测队:谯生有编写
2007年10月27日星期六
空间坐标转换说明 集团文件版本号:(M928-T898-M248-WU2669-I2896-DQ586-M1988)
坐标转换说明 GPS 接收机接收到GPS (大地坐标:经度、纬度和高度值)信号后,并不利于显示,需要将大地坐标进行转换,现选用东北天坐标系(也叫站心坐标系)作为显示的依据。 GPS 接收机接收到的第一个信号L (经度)、B (纬度)和H (高度),作为东北天坐标系的原点。当接收到第二个信号时L 1、B 1和H 1,应用坐标转换公式,转换到东北天坐标系下进行显示。依次类推,凡是接收到的GPS 信号都转换到东北天坐标系下进行显示,在东北天坐标系下预测出来的坐标值通过坐标转换公式在显示屏上显示大地坐标(经度、纬度和高度)。 1.大地坐标与直角坐标的相互转化 对空间某一点,大地坐标系(L ,B ,H )到直角坐标系(X ,Y ,Z )的转换关系如下: ?? ? ?? +-=+=+=B H e N Z L B H N Y L B H N X sin ])1([sin cos )(cos cos )(2(1) 由直角坐标系(X ,Y ,Z )转化到大地坐标系(L ,B ,H )的公式如下: ??? ? ??? --=+-++==)1(sin /]})1((/[)(arctan{) /arctan(2222e N B Z H H e N Y X H N Z B X Y L (2) 式中:B e a N 22sin 1/-=,N 为该点的卯酉圈曲率半径;2222/)(a b a e -=,a 、 b 、e 分别为该大地坐标系对应参考椭球的长半轴、短半轴和第一偏心率。长半轴 a =6378137±2m ,短半轴 b =6356.7523142km ,90130066943799.02=e 。 从公式(2)看出,经度比较容易求得,纬度和高度必须通过迭代计算获直接计算得到。迭代计算的次序为:N H B →→,通常迭代四次可以达到H 优于0.001m ,B 优于0.00001''的计算精度;教科书中给出的直接法计算公式比较繁琐,有的计算公式的应用条件受到一定限制,例如要求大地高度小于10000m 时,才能使B 、H 达到上述计算精度,有的直接计算公式精度较低。 根据[张华海]提供的方法,本文建议采用该方法将直角坐标(X ,Y ,Z )转变成大地坐标(L ,B ,H )。该方法的公式形式比较简便,B 、H 的计算精度高;用计算出
§10.2坐标转换工具 HGO 数据处理软件包提供了坐标转换程序,可以进行地方坐标与WGS-84坐标的相互转换,同时具备参数求解功能。 下面对这个工具进行介绍: 10.2.1概述 首先,介绍一下常见的三种坐标表示方法:经纬度和椭球高(BLH),空间直角坐标(XYZ),平面坐标和水准高程(xyh/NEU)。注意:椭球高是一个几何量,而水准高是一个物理量。 我们通常说的WGS-84坐标是经纬度和椭球这一种,北京54坐标是平面坐标和水准高程这一种,实质是有平面基准和高程基准组成的。 此外,再注意一下坐标转换的严密性问题,在同一个椭球里的纯几何转换都是严密的(BLH<->XYZ),而在不同的基准之间的转换是不严密的。举个例子,在WGS-84坐标和北京54坐标之间是不存在一套转换参数可以全国通用的,因为前者是一个地心坐标系,后者是一个参心坐标系。高程转换是由几何高向物理高转换。因此在每个地方必须用椭球进行局部拟合,通常用7参数模型来拟合。 那么,两个椭球间的坐标转换应该是怎样的呢?一般而言比较严密的是用七参数法(或称布尔莎模型),即X平移,Y平移,Z平移,X旋转,Y旋转,Z旋转,尺度变化K。要求得七参数就需要在一个地区需要3个以上的已知点(7个参数至少7个方程可解,所以需要三个点列出9个方程),如果区域范围不大、最远点间的距离不大于30Km(经验值)的情况可以用三参数,即X平移,Y平移,Z平移,而将X旋转,Y旋转,Z旋转,尺度变化K视为0,所以三参数只是七参数的一种特例。 七参数模型的实质是用一个局部椭球去拟合地方坐标系的形态;所以转换后获得的地方椭球高就是水准高。当然我们也可以把平面和高程两个方向分别进行拟合。例如平面用四参数模型拟合,高程方向则用二次曲面等模型来拟合。这样分开处理的模式相对七参数模型自由度更高。但是由于四参数模型参数较少,表达能力较弱,通常只用于小区域坐标转换。 综上所述,从实用的角度出发,坐标转换程序提供了两种转换策略供给客户选择使用: 1.七参数模型,一步得到地方平面和水准数据。 2.四参数加高程拟合模型,分两步得到地方平面和水准数据。 由于各厂家的模型和流程定义可能是不一样的,这里就我们公司的转换流程描述如下:七参数的转换过程是这样的:
空间直角坐标系与大地坐标系转换程序 #include
1.已知a=(2,-1,3),b=(-1,4,-2),c=(7,5,λ),若a、b、c三向量共面,则实数λ等于( ) A.62 7 B.637 C.647 D.657 2.直三棱柱ABC—A1B1C1中,若CA A.a+b-c ?a,CB?b,CC1?c,则A1B? ( ) B.a-b+c C.-a+b+c D.-a+b-c3.已知a+b+c=0,|a|=2,|b|=3,|c|=,则向量a与b之间的夹角?a,b?为 ( ) A.30°B.45°C.60°D.以上都不对 4.已知△ABC的三个顶点为A(3,3,2),B(4,-3,7),C(0,5,1),则BC边上中线长( ) A.2 B.3 C.4 D.5 5.已知a?3i?2j?k,b?i?j?2k,则5a与3b的数量积等于( ) A.-15 B.-5 C.-3 D.-1 6.已知OA?(1,2,3),OB?(2,1,2),OP?(1,1,2),点Q在直线OP上运动,则当QA?QB 取得最小值时,点Q的坐标为( )
131123448A.(,,) B.(,,) C.(,,) 243234333D.(447,,)333二、填空题7.若向量a?(4,2,?4),b?(6,?3,2),则(2a?3b)?(a?2b)?__________________。 8.已知向量a?(2,?1,3),b?(?4,2,x),若a?b,则x?______;若a//b则x? ______。已知向量a?(3,5,1),b?(2,2,3),c?(4,?1,?3),则向量2a?3b?4c的坐标为 .14.如图正方体ABCD-A1B1C1D1中,E、F、G分别是B1B、AB、BC的中点. (1)证明D1F⊥平面AEG; (2)求cos?AE,D1B? 19.(14分)如图所示,直三棱柱ABC—A1B1C1中,CA=CB=1,∠BCA=90°,棱AA1=2,M、N分别是A1B1、A1A的中点. (1)求BN的长; (2)求cos的值; (3)求证A1B⊥C1M.
坐标转换方法 空间直角坐标系如果其原点不动,绕着某一个轴旋转而构成的新的坐标系,这个过程就叫做坐标旋转。在旧坐标系中的坐标与在旋转后新坐标系中的坐标有一定的转换关系,这种转换关系可以用转换矩阵来表示。 如图5.7,直角坐标系XYZ,P点的坐标为(x, y, z),其相应的在XY 平面,XZ平面,YZ平面分别为M(x, y,0),Q(x,0, z)和N(0, y, z)。 图5.7直角坐标系XYZ 设?表示第j 轴的旋转角度,R j (?) 表示绕第j 轴的旋转,其正方向是沿坐标轴向原点看去的逆时针方向。很明显当j 轴为旋转轴时,它对应的坐标中的j 分量是不变的。由于直角坐标系是对称的,下面我们以绕Z轴旋转为例推导其旋转变换矩阵,其它两个轴推导和它是一样的。 设图5.7的坐标绕Z轴逆时针旋转θ角度,新坐标为X 'Y'Z',如图5.8所示: 图5.8 坐标绕Z 轴逆时针旋转θ角度 由于坐标中的z 分量不变,我们可以简化地在XY 平面进行分分析,如图
5.9所示: 图5.9坐标绕Z 轴逆时针旋转θ 角度的XY 平面示意图 点 M X 和点M X ' 分别是M 点在X 轴和X '轴的投影。如图5.9 cos cos() sin sin() X X X X x OM OM MOM OM y MM OM MOM OM ?θ?θ==∠=-??==∠=-? (5-1) cos cos sin sin X X X X x OM OM MOM OM y MM OM MOM OM ? ?'''''==∠=??'==∠=? (5-2) 把(5-1)式按照三角函数展开得: cos cos sin sin sin cos cos sin x OM OM y OM OM ?θ?θ ?θ?θ=+??=+? (5-3) 把(5-2)式代入(5-3)式得: cos sin sin cos x x y y x y θθ θθ''=+??''=-+? (5-4) 坐标中的z 分量不变,即z = z'这样整个三维坐标变换就可以写成(用新坐标表 示旧坐标) cos sin sin cos x x y y x y z z θθ θθ''=+? ?''=-+??' =? (5-5) 把式(5-5)用一个坐标旋转变换矩阵R Z (θ) 表示可以写成:
坐标系转换问题--WGS84坐标 BJ54 BJ80 2012-10-18 14:37 对于坐标系的转换,给很多GPS的使用者造成一些迷惑,尤其是对于刚刚接触的人,搞不明白到底是怎么一回事。我对坐标系的转换问题,也是一知半解,对于没学过测量专业的人来说,各种参数的搞来搞去实在让人迷糊。在我有限的理解范围内,我想在这里简单介绍一下,主要是抛砖引玉,希望能引出更多的高手来指点迷津。 我们常见的坐标转换问题,多数为WGS84转换成北京54或西安80坐标系。其中WGS84坐标系属于大地坐标,就是我们常说的经纬度坐标,而北京54或者西安80属于平面直角坐标。对于什么是大地坐标,什么是平面直角坐标,以及他们如何建立,我们可以另外讨论。这里不多啰嗦。 那么,为什么要做这样的坐标转换呢? 因为GPS卫星星历是以WGS84坐标系为根据而建立的,我国目前应用的地形图却属于1954年北京坐标系或1980年国家大地坐标系;因为不同坐标系之间存在着平移和旋转关系(WGS84坐标系与我国应用的坐标系之间的误差约为80),所以在我国应用GPS进行绝对定位必须进行坐标转换,转换后的绝对定位精度可由80提高到5-10米。简单的来说,就一句话,减小误差,提高精度。 下面要说到的,才是我们要讨论的根本问题:如何在WGS84坐标系和北京54坐标系之间进行转换。 说到坐标系转换,还要罗嗦两句,就是上面提到过的椭球模型。我们都知道,地球是一个近似的椭球体。因此为了研究方便,科学家们根据各自的理论建立了不同的椭球模型来模拟地球的形状。而且我们刚才讨论了半天的各种坐标系也是建立在这些椭球基准之上的。比如北京54坐标系采用的就是克拉索夫斯基椭球模型。而对应于WGS84坐标系有一个WGS84椭球,其常数采用IUGG第17届大会大地测量常数的推荐值。WGS84椭球两个最常用的几何常数:长半轴:6378137±2(m);扁率:1:298.257223563 之所以说到半长轴和扁率倒数是因为要在不同的坐标系之间转换,就需要转换不同的椭球基准。这就需要两个很重要的转换参数dA、dF。 dA的含义是两个椭球基准之间半长轴的差;dF的含义是两个椭球基准之间扁率倒数的差。在进行坐标转换时,这两个转换参数是固定的,这里,我们给出在进行84—〉54,84—〉80坐标转换时候的这两个参数如下: WGS84>北京54:DA:-108;DF:0.0000005 WGS84>西安80:DA: -3 ;DF: 0 椭球的基准转换过来了,那么由于建立椭球的原点还是不一致的,还需要在dXdYdZ这三个空间平移参量,来将两个不同的椭球原点重合,这样一来才能使两个坐标系的椭球完全转换过来。而由于各地的地理位置不同,所以在各个地方的这三个坐标轴平移参量也是不同的,因此需要用当地的已知点来计算这三个参数。具体的计算方法是: 第一步:搜集应用区域内GPS“B”级网三个以上网点WGS84坐标系B、L、H值及我国坐标系(BJ54或西安80)B、L、h、x值。(注:B、L、H分别为大地坐标系中的大地纬度、大地经度及大地高,h、x分别为大地坐标系中的高程及高程异常。各参数可以通过各省级测绘局或测绘院具有“A”级、“B”级网的单位获得。) 第二步:计算不同坐标系三维直角坐标值。计算公式如下: X=(N+H)cosBcosL Y=(N+H)cosBsinL Z=[N(1-e2)+H]sinB
工具坐标系 点数据是由直角坐标系为基准的工具(Tool)坐标系中心位置及姿势所表示的。 位置用位置数据(X、Y、Z),姿势用姿势数据(U、V、W)指定。 除了机器人固有的Tool 0 坐标系外,用户可自定义1~15 共15个Tool坐标系。 机器人默认的Tool 0坐标系根据机器人类型分别如下定义。 水平多关节机器人(4轴机器人)的Tool 0坐标系的定义 第4轴(旋转轴)的中心为原点,把第4轴旋转到0度角度时与机器人直角坐标系平行的坐标轴为坐标轴的坐标系为Tool 0坐标系。(参考下图)。Tool 0坐标系是固定在第四关节(旋转关节)的,所以第四关节时Tool 0坐标系也同时旋转。 垂直多关节机器人(6轴机器人)的Tool 0坐标系的定义 桌上型时,把所有关节移动到0度位置时第6关节的法兰面中心为原点,垂直上方向为X轴,机器人直角坐标的X轴方向为Y轴,对第6关节法兰面垂直的方向为Z轴的坐标系为Tool 0坐标系(请参考下图)。 Tool 0坐标系是固定在第6关节的,所以机器人姿势变化时Tool 0坐标系也相应的移动。 吊顶型和挂壁型时的Tool 0坐标系请参考下图。
用户自定义工具(Tool)坐标系的应用 1)视觉定位中的Tool应用。 用视觉定位来补正工件的角度时如果安装在旋转轴(第4轴)上的吸嘴或夹具的中心(Tool中心)与Tool 0坐标系不一致,通常需要根据角度偏移值和Tool中心的偏移值经过复杂的三角函数计算才能准确的抓取工件。 这时事先把吸嘴中心或夹具中心校准为自定义Tool坐标系,就无需任何计算可准确抓取工件。 2)快速搬运工件时多Tool坐标系的应用 用一个吸嘴或夹具搬运工件时有时因机器人速度限制无法达到短循环时间的要求,这时增加几个吸嘴或夹具同时抓取多个工件搬运可减短10%-20%的循环时间,根据情况有时甚至减短30%-40%的循环时间。 每个吸嘴或夹具校准为独立的Tool坐标系,可简单实现。 3)点胶等经常更换Tool时的应用。 在点胶项目中因胶针容易堵塞经常要更换,一般情况下每次更换胶头或胶桶后需要重新校准点胶的位置,如果使用了自定义Tool的功能,每当更换胶头或胶桶时只需重新校准胶头的Tool即可继续准确的点胶。 Tool的定义方法 准确定义机器人夹爪或吸嘴的Tool是非常重要的。 根据Tool的定义机器人通过夹爪或吸嘴取得位置数据,位置数据的全部都与Tool0不相关,只跟夹爪或吸嘴有关。使用SPEL+语言定义Tool时请使用TLSET指令。 Tool的定义方法有以下几种。 使用机器人管理器的工具向导定义Tool 可以使用机器人管理器的工具向导定义Tool。 使用工具向导按照以下步骤操作。 (1) 打开机器人管理器 (2) 点击左边列表中的工具 (3) 点击工具向导按钮 (4) 按照工具向导的提示定义Tool。 Tool的手动计算方法 NOTE 使用以下计算Tool的方法时,不能在释放轴的状态下(SFREE状态下)计算,换句话说不能用手推动机器人。使用步进示教窗口步进移动机器人。 Tool 的计算请按照以下步骤进行。 (1) 请把U轴转动到0o。 (2) 步进示教窗口中的Tool设置为0(TOOL0)。 (3) 步进机器人,请把夹爪或吸嘴对准基准点(对的越准越好,对准的准确度直接影响Tool 的校准精度),此时U轴的角度要保持0o。
坐标转换源代码--GPS定位程序(C++) GPS数据处理中为了满足不同的需要,处理的数据要进行坐标转换,得到在不同坐标系统下的结果,下面是笛卡尔坐标系,大地坐标系,站心地平坐标系(线型和极坐标形式)之间的转换源代码: 头文件: #ifndef _COORDCOVERT_H #define _COORDCOVERT_H #include "stdlib.h" //WGS-84椭球体参数 const double a=6378137.0;//长半轴 const double flattening=1/298.257223563;//扁率 const double delta=0.0000001; typedef struct tagCRDCARTESIAN{ double x; double y; double z; }CRDCARTESIAN; typedef CRDCARTESIAN *PCRDCARTESIAN;
//笛卡尔坐标系 typedef struct tagCRDGEODETIC{ double longitude; double latitude; double height; }CRDGEODETIC; typedef CRDGEODETIC *PCRDGEODETIC; //大地坐标系 typedef struct tagCRDTOPOCENTRIC{ double northing; double easting; double upping; }CRDTOPOCENTRIC; typedef CRDTOPOCENTRIC *PCRDTOPOCENTRIC; //站心地平坐标系(线坐标形式) typedef struct tagCRDTOPOCENTRICPOLAR{ double range;
坐标与直角空间坐标转换计算公式 一、参心坐标与参心空间直角坐标转换 1名词解释: A :参心空间直角坐标系: a) 以参心0为坐标原点; b) Z 轴与参考椭球的短轴(旋转轴)相重合; c) X 轴与起始子午面和赤道的交线重合; d) Y 轴在赤道面上与X 轴垂直,构成右手直角坐标系0-XYZ ; e) 地面点P 的点位用(X ,Y ,Z )表示; B :参心坐标系: a) 以参考椭球的中心为坐标原点,椭球的短轴与参考椭球旋转轴重合; b) 纬度B :以过地面点的椭球法线与椭球赤道面的夹角为纬度B ; c) 经度L :以过地面点的椭球子午面与起始子午面之间的夹角为经度L ; d) 高H :地面点沿椭球法线至椭球面的距离为高H ; e) 地面点的点位用(B ,L ,H )表示。 2 参心坐标转换为参心空间直角坐标: ?? ? ?? +-=+=+=B H e N Z L B H N Y L B H N X sin *])1(*[sin *cos *)(cos *cos *)(2 公式中,N 为椭球面卯酉圈的曲率半径,e 为椭球的第一偏心率,a 、b 椭球的长短半径,f 椭球扁率,W 为第一辅助系数 a b a e 2 2-= 或 f f e 1*2-= W a N B W e = -=22 sin *1( 80椭球参数: 长半轴a=6378140±5(m )
短半轴b=6356755.2882m 扁 率α=1/298.257 3 参心空间直角坐标转换参心坐标 [ ] N B Y X H H e N Y X H N Z B X Y L -+= +-++==cos ))1(**)() (*arctan() arctan(2 22 2 2 二 高斯投影及高斯直角坐标系 1、高斯投影概述 高斯-克吕格投影的条件:1. 是正形投影;2. 中央子午线不变形 高斯投影的性质:1. 投影后角度不变;2. 长度比与点位有关,与方向无关; 3. 离中央子午线越远变形越大 为控制投影后的长度变形,采用分带投影的方法。常用3度带或6度带分带,城市或工程控制网坐标可采用不按3度带中央子午线的任意带。 2、高斯投影正算公式: 52224253 2236 425442232)5814185(cos 120 )1(cos 6 cos )5861(cos sin 720 495(cos sin 24cos sin 2l t t t B N l t B N Bl N y l t t B B N l t B B N Bl B N X x ηηηηη-++-++-+=+-+++-++ =) 3、高斯投影反算公式:
大地坐标(BLH) 平面直角坐标(XYZ) 四参数:X 平移、Y 平移、旋转角和比例 七参数:X平移,Y平移,Z 平移,X 轴旋转,Y 轴旋转,Z 轴旋转,缩放比例(尺度比) GPS控制网是由相对定位所求的的基线向量而构成的空间基线基线向量网,在GPS控制网的平差中,是以基线向量及协方差为基本观测量。 图3-1表示为HDS2003数据处理软件进行网平差的基本步骤,从图中可以看到,网平差实际上可以分为三个过程: l、前期的准备工作,这部分是用户进行的。即在网平差之前,需要进行坐标系的设置、并输入已知点的经纬度、平面坐标、高程等。 2、网平差的实际进行,这部分是软件自动完成的; 3、对处理结果的质量分析与控制,这部分也是需要用户分析处理的过程。 图3-1 平差过程 坐标系选择 针对不同的平差,要相应选择不同的坐标系,是否输入相应信息。在笔者接触过的项目中,平差时先通过三维无约束平差后,再进行二维约束平差。由于先进行的时三维无约束平差,是在WGS84坐标系统下进行的。 首先更改项目的坐标系统。在菜单“项目”->“坐标系统”或在工具栏“坐标系统”,则弹出“坐标
系统”对话框,选择WGS-84坐标。 图3-2 坐标系统 这里注意的是,在“投影”下见图,中央子午线是114°。很多情况下这里需要进行修改。 图3-3 WGS84投影 软件中自带的“中国-WGS 84”是允许修改的,我们换种方法:就是新建一个坐标文件,其他参数都和“中国-WGS84”一致,仅仅将中央子午线修改下。 在上图中,点击“新建”,得到“COORD GM”对话框,在“文件”->“新建”,如图
图3-4 新建坐标系统 然后在“设置”->“地图投影”,直接修改中央子午线,这里以81°为例,点击确定后,返回“COORD GM”对话框。 图3-5 投影设置 将输入源坐标和输入目标坐标的椭球,均改为WGS84。在“文件”->“保存”,输入名称和国家(中国),退出操作。
工程施工过程中,常常会遇到不同坐标系统间,坐标转换的问题。目前国内常见的转换有以下几种:1,大地坐标(BLH)对平面直角坐标(XYZ);2,北京54全国80及WGS84坐标系的相互转换;3,任意两空间坐标系的转换。其中第2类可归入第三类中。所谓坐标转换的过程就是转换参数的求解过程。常用的方法有三参数法、四参数法和七参数法。以下对上述三种情况作详细描述如下: 1,大地坐标(BLH)对平面直角坐标(XYZ) 常规的转换应先确定转换参数,即椭球参数、分带标准(3度,6度)和中央子午线的经度。椭球参数就是指平面直角坐标系采用什么样的椭球基准,对应有不同的长短轴及扁率。一般的工程中3度带应用较为广泛。对于中央子午线的确定有两种方法,一是取平面直角坐标系中Y坐标的前两位*3,即可得到对应的中央子午线的经度。如x=3250212m,y=395121123m,则中央子午线的经度=39*3=117度。另一种方法是根据大地坐标经度,如果经度是在155.5~185.5度之间,那么对应的中央子午线的经度=(155.5+185.5)/2=117度,其他情况可以据此3度类推。 另外一些工程采用自身特殊的分带标准,则对应的参数确定不在上述之列。 确定参数之后,可以用软件进行转换,以下提供坐标转换的程序下载。 2,北京54全国80及WGS84坐标系的相互转换 这三个坐标系统是当前国内较为常用的,它们均采用不同的椭球基准。 其中北京54坐标系,属三心坐标系,大地原点在苏联的普而科沃,长轴6378245m,短轴6356863,扁率1/298.3;西安80坐标系,属三心坐标系,大地原点在陕西省径阳县永乐镇,长轴6378140m,短轴6356755,扁率1/298.25722101;WGS84坐标系,长轴6378137.000m,短轴6356752.314,扁率1/298.257223563。由于采用的椭球基准不一样,并且由于投影的局限性,使的全国各地并不存在一至的转换参数。对于这种转换由于量较大,有条件的话,一般都采用GPS联测已知点,应用GPS软件自动完成坐标的转换。当然若条件不许可,且有足够的重合点,也可以进行人工解算。详细方法见第三类。 3,任意两空间坐标系的转换 由于测量坐标系和施工坐标系采用不同的标准,要进行精确转换,必须知道至少3个重合点(即为在两坐标系中坐标均为已知的点。采用布尔莎模型进行求解。布尔莎公式: 对该公式进行变换等价得到: 解算这七个参数,至少要用到三个已知点(2个坐标系统的坐标都知道),采用间接平差模型进行解算: 其中:V 为残差矩阵; X 为未知七参数; A 为系数矩阵; 解之:L 为闭合差 解得七参数后,利用布尔莎公式就可以进行未知点的坐标转换了,每输入一组坐标值,就能求出它在新坐标系中的坐标。但是要想GPS观测成果用于工程或者测绘,还需要将地方直
大地坐标与直角空间坐标转换计算公式 一、参心大地坐标与参心空间直角坐标转换 1名词解释: A :参心空间直角坐标系: a) 以参心0为坐标原点; b) Z 轴与参考椭球的短轴(旋转轴)相重合; c) X 轴与起始子午面和赤道的交线重合; d) Y 轴在赤道面上与X 轴垂直,构成右手直角坐标系0-XYZ ; e) 地面点P 的点位用(X ,Y ,Z )表示; B :参心大地坐标系: a) 以参考椭球的中心为坐标原点,椭球的短轴与参考椭球旋转轴重合; b) 大地纬度B :以过地面点的椭球法线与椭球赤道面的夹角为大地纬度B ; c) 大地经度L :以过地面点的椭球子午面与起始子午面之间的夹角为大地经度L ; d) 大地高H :地面点沿椭球法线至椭球面的距离为大地高H ; e) 地面点的点位用(B ,L ,H )表示。 2 参心大地坐标转换为参心空间直角坐标: ?? ? ?? +-=+=+=B H e N Z L B H N Y L B H N X sin *])1(*[sin *cos *)(cos *cos *)(2 公式中,N 为椭球面卯酉圈的曲率半径,e 为椭球的第一偏心率,a 、b 椭球的长短半径,f 椭球扁率,W 为第一辅助系数 a b a e 2 2-= 或 f f e 1 *2-= W a N B W e = -=22 sin *1( 西安80椭球参数: 长半轴a=6378140±5(m )
短半轴b=6356755.2882m 扁 率α=1/298.257 3 参心空间直角坐标转换参心大地坐标 [ ] N B Y X H H e N Y X H N Z B X Y L -+= +-++==cos ))1(**)() (*arctan() arctan(2 22 2 2 二 高斯投影及高斯直角坐标系 1、高斯投影概述 高斯-克吕格投影的条件:1. 是正形投影;2. 中央子午线不变形 高斯投影的性质:1. 投影后角度不变;2. 长度比与点位有关,与方向无关; 3. 离中央子午线越远变形越大 为控制投影后的长度变形,采用分带投影的方法。常用3度带或6度带分带,城市或工程控制网坐标可采用不按3度带中央子午线的任意带。 2、高斯投影正算公式: 52224253 2236 425442232)5814185(cos 120 )1(cos 6 cos )5861(cos sin 720 495(cos sin 24cos sin 2l t t t B N l t B N Bl N y l t t B B N l t B B N Bl B N X x ηηηηη-++-++-+=+-+++-++ =) 3、高斯投影反算公式:
坐标转换软件使用说明 1、功能介绍 在南京进行测量的同行一直受到坐标系统和已知控制点的困扰, 所以往往许多测量成果因坐标系统问题得不到承认,浪费了大量的人 力物力。基于此:本公司集全部精干技术力量,研发本款坐标转换软 件,可以说:它是全体测量工作者的福音。 南京CORS因为其免费,应用十分广泛,但是使用南京CORS在 很多情况下,因为已知控制点原因无法实地取得平面坐标而限制了 CORS优势的发挥。本软件可以实现基于南京CORS测量的WGS84 坐标与92南京地方坐标双向自由转换,转换精度与权威部门转换成 果比较(在南京市6800平方公里范围内,包括高淳、溧水、六合、 浦口):平面残差中误差优于±5mm、高程残差中误差均优于±1cm。精度完全具有保障,免去到处寻找控制点带来的人力、财力和时间浪费。按照最新城市规范规定,这种模式可以实现城市E级GPS控制 点的平面测量。 本软件是一款后处理软件,即:内业处理软件,它不能在实地计 算坐标,通过事后(采集)或事前(放样)数据处理,同样可以让你 在野外无忧无障碍开展工作。 适用平台:Windows 32位所有系统平台。 2、外业采集数据转换操作介绍 外业测量数据从RTK手簿中以WGS84坐标格式导出,导出以后 将文件复制到计算机,假设文件名为0513.dat。在电脑中启动软件,
界面如下: 图一:程序启动界面 首先选择转换方向下拉列表框,此时选择“WGS84—>NJ92”,表示将WGS84坐标转向92南京地方坐标,此时软件会出现一个按钮 键读入数据并转换,点击该按钮,在弹出的文件对话框中选择从手簿 导出的外业坐标文件。如:0513.dat,点击打开按钮即可完成转换。如图二: 图二:选择原始数据文件 记得一定要选择你的原始数据文件格式在点击打开按钮。转换完 成以后又会在对话框中再出现一个按钮导出转换成果,点击它即可将
同步视频教程:投影转换(转CGCS2000) 视频教程:如何选择中央子午线或者分度带 注意:投影转换成cgcs2000坐标系需要下载无偏移卫星图像进行转换,有偏移的转换将导致转换后的卫星图像扭曲,坐标错误,无法配准。 第一步:选择无偏移地图源,下载你所需要的卫星图像。 第二步:选择BIGEMAP软件右边工具栏,选择【投影转换】,如下图所示: 2.1 选择说明: 1. 源文件:选择下载好的卫星图像文件(下载目录中后缀为tiff的文件) 2. 源坐标系:打开的源文件的投影坐标系(自动读取,不需要手动填写) 3. 输出文件:选择转换后你要保持文件的文件路径和文件名 4. 目标坐标系:选择你要转换成的目标坐标系,如下图: 选择上图的更多,如下图所示:
1:选择 -CGCS2000 2:选择地区3:选择分度带对应的带号(一般默认,也可以手动修改)选择对应的分度带或者中央子午线(请参看:如何选择分度带?),点击【确定】 5. 重采样算法:投影转换需要将影像的像素重新排列,一次每种算法的效率不一样,一般选择【立方卷积采样】,以达到最好的效果。如下图:
6. 指定变换参数:在不知道的情况下,可以不用填此处信息,如果√上,则如下图: 此参数为【三参数】或者【七参数】,均为国家保密参数,需要到当地的测绘部门或者国土部门,以单位名义签保密协议进行购买,此参数各地都不一样,是严格保密的,请不要随便流通。 第三步:点击【确定】,开始转换,如下图:
第四步:完成后,打开你刚才选择的输出文件夹,里面就是转换后的卫星图像。 第五步:如果你需要套合你手里已经有的矢量文件,请参看:【BIGEMAP无偏移影像叠加配准】
大地坐标向空间坐标转换和空间坐标向大地坐标转换的c程 序 #include
#include "stdio.h" #include "math.h" #include "stdlib.h" #include "iostream" #define PI 3.1415926535897323 double a,b,c,e2,ep2; int main() { int m,n,t; double RAD(double d,double f,double m); void RBD(double hd); void BLH_XYZ(); void XYZ_BLH(); void B_ZS(); void B_FS(); void GUS_ZS(); void GUS_FS(); printf(" 大地测量学\n"); sp1:printf("请选择功能:\n"); printf("1.大地坐标系到大地空间直角坐标的转换\n"); printf("2.大地空间直角坐标到大地坐标系的转换\n"); printf("3.贝塞尔大地问题正算\n"); printf("4.贝塞尔大地问题反算\n"); printf("5.高斯投影正算\n"); printf("6.高斯投影反算\n"); printf("0.退出程序\n"); scanf("%d",&m); if(m==0)exit(0); sp2:printf("请选择椭球参数(输入椭球序号):\n"); printf("1.克拉索夫斯基椭球参数\n"); printf("2.IUGG_1975椭球参数\n"); printf("3.CGCS_2000椭球参数\n"); printf("0.其他椭球参数(自行输入)\n"); scanf("%d",&n); switch(n) { case 1:a=6378245.0;b=6356863.0188;c=6399698.9018;e2=0.00669342162297;ep2=0.0067385254146 8;break;
2019年第3 期 作者简介:黄明鑫,男,1990年出生,江苏盐城人,硕士研究生,助教,研究方向:机电一体化。 基于新时达SD500机器人工具坐标系 标定方法研究 盐城工业职业技术学院机电工程学院 黄明鑫 1引言 工业机器人的坐标系可分为基坐标系、法兰坐标系、工具坐标系以及工件坐标系[1]。机器人坐标系的标定结果对机器人工作的稳定性和精确性有着很大的影响。机器人坐标系的标定可分为工具标定和工件标定两种,工具标定实际上是求得工具坐标系的位姿矩阵[2]。本文以新时达SD500机器人为研究对象,在机器人示教器中对机器人工具标定的方法进行了研究。 2机器人工具标定 工业机器人完成某项作业时,都需要在机器人的末端安装相应的工具,为了使机器人能够更加精确地定位,需要对机器人的工具进行标定操作。工业机器人工具标定包括TCP 位置的标定(XYZ )和工具坐标系姿态的标定(ABC )。新时达工业机器人工具标定的过程如图1所示。在示教器新建tool 变量来记录工具坐标系的位置信息,tool 变量的X 、Y 、Z 、A 、B 、C 初始值为0。 图1机器人工具标定的过程 2.1TCP 位置标定 新时达SD500机器人工具位置的标定有一点法和四点法两种。一点法标定是根据已校准的工具和未校准工具示教同一个参考目标点,记录相应的位置信息,通过坐标系的变换,计算出未校准工具对法兰的相对位置。四点法标定是指将未校准工具以四种不相同的姿态移动到同一个参考目标点进行示教,然后通过坐标系的变换,获得未校准工具对法兰的相对位置。一般机器人工具位置的示教都是采用四点法标定的方法,这样得到的工具位置标定信息更加精确。工具TCP 位置四点法标定过程的部分截图如图2所示,按照示教器中标定的文字提示可以完成机器人工具位置的标定。 (a )四点法示教XYZ (b )四点法示教XYZ 的结果 图2工具位置四点法示教XYZ 2.2工具坐标系姿态标定 新时达SD500机器人工具坐标系姿态的标定有一点法和三点法两种。 一点法标定是改变工业机器人的姿态,使工具的X 轴和基坐标系的Z 轴对齐,同时工具的YZ 两轴和基坐标系的YX 也相应对齐,这样就可以获得机器人工具的姿态信息。三点法标定需要利用已经标定的工具位置信息完成姿态的标定,它需要三个点的位置信息,首先示教Z 轴上两个点,然后示教ZX 平面上一点,即选择Z 轴、ZX 平面方向,示教Z 轴上第一个点,接着示教Z 轴上第二个点,最后示教ZX 平面上的点,这样就得到了工具姿态ABC 的值。工具姿态三点法标定过程的部分截图如图3所示,按照示教器中标定的文字提示可以完成工具姿态的标定。 (a )三点法示教ABC (b )三点法示教ABC 的结果 图3工具姿态三点法示教ABC 2.3标定检验 机器人工具的位置和姿态标定好后需要检验标定是否合格。一般机器人工具位置标定的误差在2mm 以内算合格,而姿态标定的检验是在机器人示教器中改变标定的ABC 的数值,若机器人的末端没有较大的位置改变,即为合格[3]。机器人工具位置和姿态检验合格后,新建的工具变量就可以在程序中使用了 。 机电·教育·推广 HEBEINONGJI 河北 农机34
《程序设计语言(C)》大作业报告 题目:坐标系的转换 完成人: 小组构成及分工: *******独自完成程序的书写及调试. 问题定义: 大地坐标和空间直角坐标系以及其他坐标系之间转换在卫星大地测量中经常用到的坐标系有,空间直角坐标系和大地直角坐标。为了实现测量数据的快速高效的在不同的坐标系的转换,方便在学习及应用的中。需要编写一程序实现数据的转换,实现空间直角坐标系与大地直角坐标之间在同一个系统中转换。 开发工具:Visual C++ 6.0 数据结构描述: 用不同的变量表示不同的坐标,变量选择时根据使用的习惯方便使用者的识别。 X:表示大地直角坐标的纵坐标; Y:表示大地直角坐标的横坐标; Z表示大地直角坐标的竖坐标 L:表示空间直角坐标的经度; B:表示空间直角坐标的纬度; H:表示空间直角坐标的高度; 算法描述: 通过编写一个主函数描述出整个程序的主体不分,然后通过调用函数实现坐标的转换。 程序调试情况: 坐标由大地直角坐标系中的转换为空间直角坐标系的坐标: 大地直角坐标转换后空间直角坐标: B=60; X=2055059.130122; L=50; Y=2449123.986892; H=100; Z=5500477.615329;
坐标由空间直角坐标系中的坐标转换为大地直角坐标系中的坐标; 空间直角坐标转换后大地直角坐标; X=100; B=-127.103127844; Y=100; L=45.000000000; Z=10000; H=-6391994.685276; 参考文献或网站: 1.《控制测量学》(下册)第三版孔祥元郭际明主编武汉大学出版社; 2. 《数字测图原理与方法》第二版潘正风程效军成枢王腾军宋伟东 邹进贵编著武汉大学出版社; 3.《C 程序设计语言》魏东平朱连章于广斌编著;电子工业出版社 心得体会: 写这个大作业确实让我收获了许多! 1.写这次计算机大作业,让我经历了一个难忘的过程。自己的是必须得自己独立自主的想办法去解决,没人会为与自己没多大关系的事分很多神的! 2.经历了过程,让我学到了些东西也在解决困难的过程中认识了些学长,他们也教会了我许多学习经验。 3.在自己调试程序的过程中也知道了点以前写程序时不知道的细节问题,如:数据的类型在计算时会起到一定的限制,计算三角函数时数值向角度的转换.....;这就是知识! 4.这次写的作业题目是出自本专业的题,这次写计算机作业的所有收获都是以后学习的经验、财富.....! 5.在本次作业的调试中真的是考验了我的耐性。因为一个函数中的数据类型的错误,导致调了近两天。 6.知识水平的有限,所以让我学会了怎样以更好的方式去向别人请教学问!