1:设计概述
1.1:设计背景
数字信号的传输方式分为基带传输和带通传输,在实际应用中,大多数信道具有带通特性而不能直接传输基带信号。为了使数字信号在带通信道中传输,必须使用数字基带信号对载波进行调制,以使信号与信道的特性相匹配。这种用数字基带信号控制载波,把数字基带信号变换为数字带通信号的过程称为数字调制。通常使用键控法来实现数字调制,比如对载波的振幅、频率和相位进行键控。在这三种调制的基础上为了得到更高的效果也出现了很多其他的调制方式,如:DPSK ,MASK ,MFSK ,MPSK ,APK 。它们其中有的一些是将基本的调制方式用在多进制上或者引入了一些新的方式来解决基本调制的一些问题如相位模糊和无法提取位定时信号,另外一些是由多种基本的调制方式组合来达到更好的效果。通过设计这个2PSK 我们可以更好的了解在这一方面相关的知识。
1.2:设计内容以及要求
1. 选择二进制数字调制系统(2PSK )之一进行仿真分析。
2.参考相应课程章节设计所选系统的调制和解调模块,构建系统框图。 3. 熟悉原理并设计仿真模型中各个模块的参数。
1.3设计目的
在已经学习的MA TLAB 的基础之上运用MATLAB 编程实现2PSK 调制解调过程,并
且输出其调制及解调过程中的波形,讨论其调制和解调效果。得到最终的效果。
2、设计原理
2.1 2PSK 数字调制过程分析
数字信号的传输方式分为基带传输和带通传输,在实际应用中,大多数信道具有带通特性而不能直接传输基带信号。为了使数字信号在带通信道中传输,必须使用数字基带信号对载波进行调制,以使信号与信道的特性相匹配。这种用数字基带信号控制载波,把数字基带信号变换为数字带通信号的过程称为数字调制。
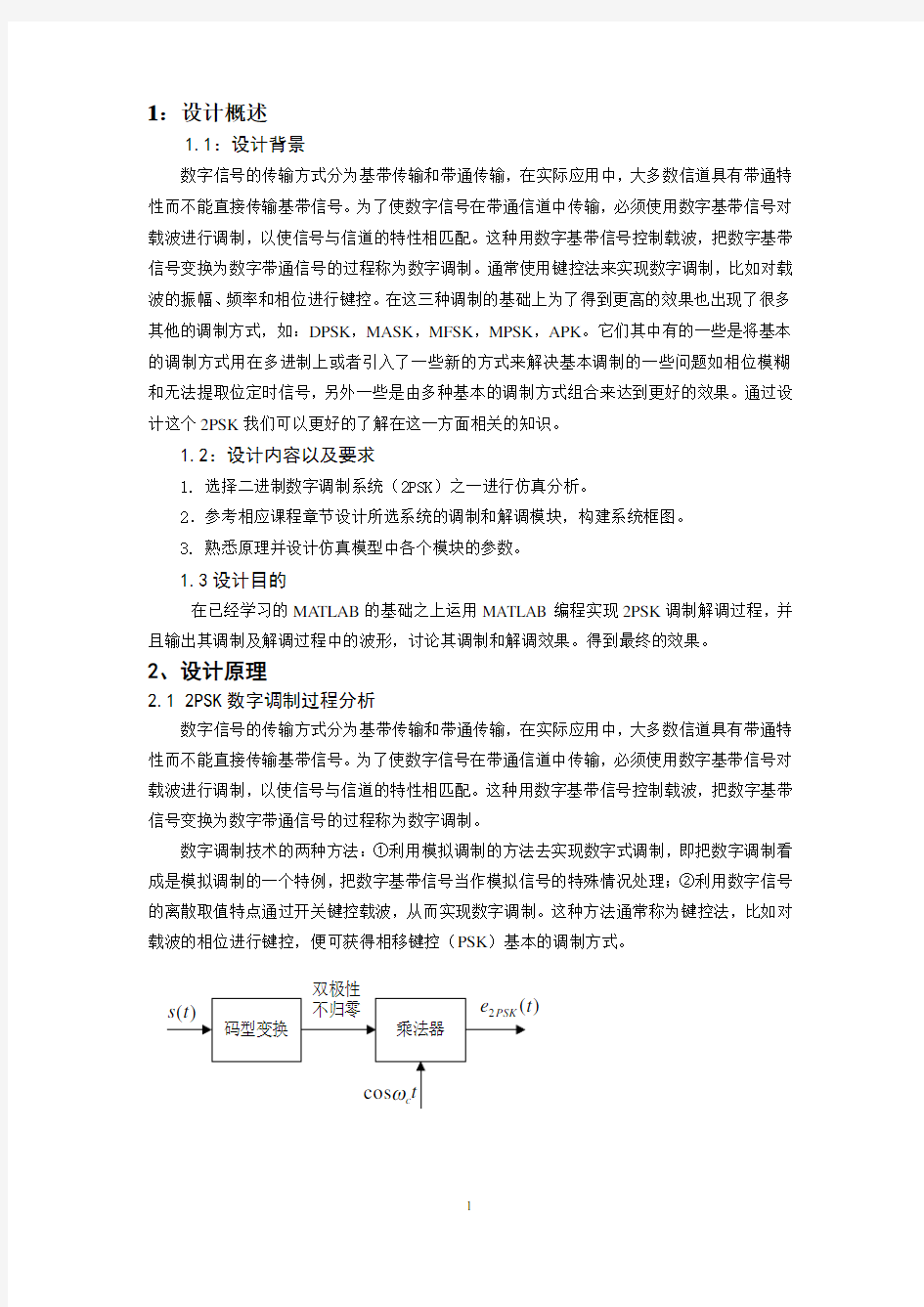
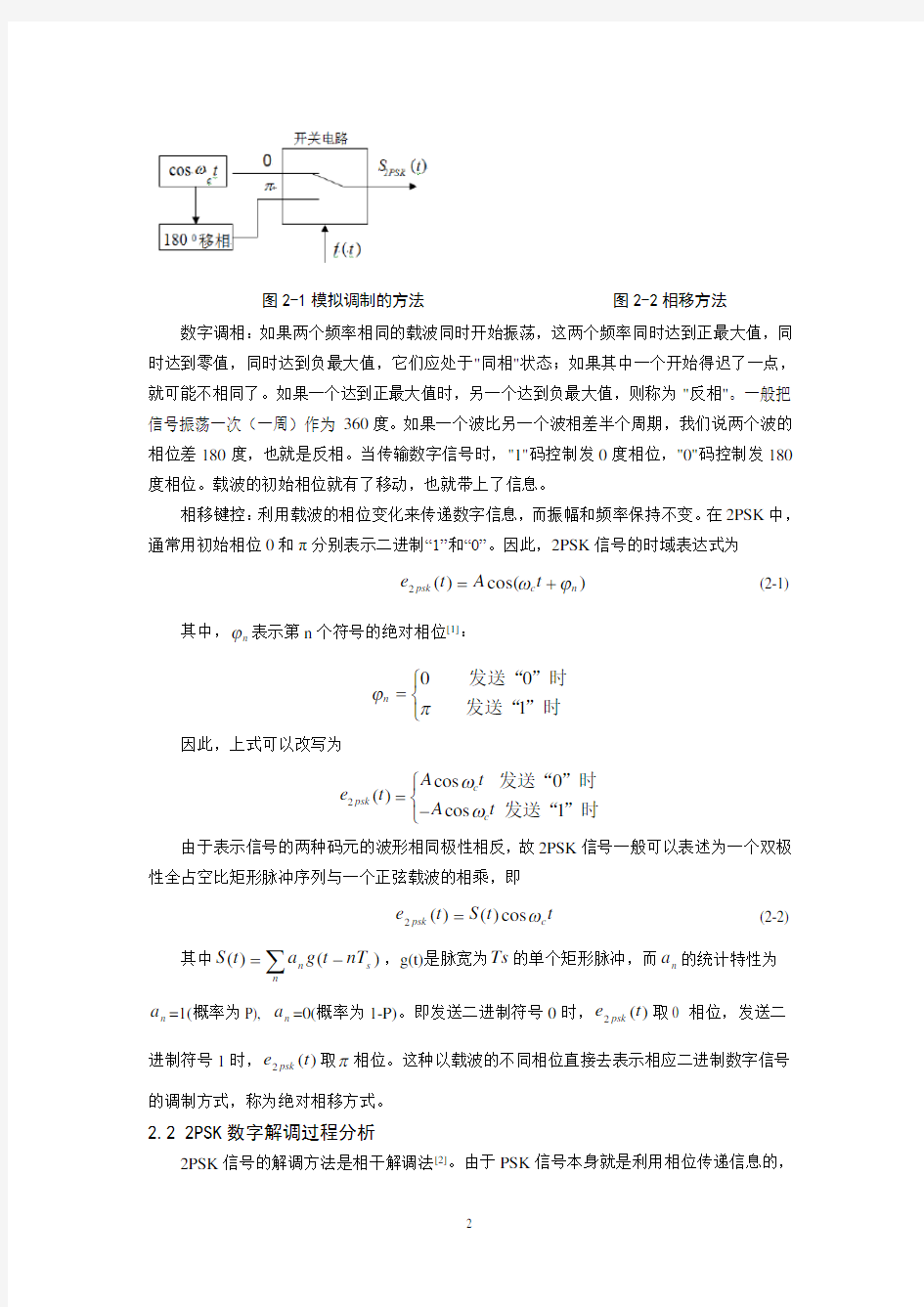
数字调制技术的两种方法:①利用模拟调制的方法去实现数字式调制,即把数字调制看成是模拟调制的一个特例,把数字基带信号当作模拟信号的特殊情况处理;②利用数字信号的离散取值特点通过开关键控载波,从而实现数字调制。这种方法通常称为键控法,比如对载波的相位进行键控,便可获得相移键控(PSK )基本的调制方式。
乘法器
)
(2t e PSK 双极性
不归零
t
c cos )
(t s 码型变换
图2-1模拟调制的方法 图2-2相移方法
数字调相:如果两个频率相同的载波同时开始振荡,这两个频率同时达到正最大值,同时达到零值,同时达到负最大值,它们应处于"同相"状态;如果其中一个开始得迟了一点,就可能不相同了。如果一个达到正最大值时,另一个达到负最大值,则称为"反相"。一般把信号振荡一次(一周)作为360度。如果一个波比另一个波相差半个周期,我们说两个波的相位差180度,也就是反相。当传输数字信号时,"1"码控制发0度相位,"0"码控制发180度相位。载波的初始相位就有了移动,也就带上了信息。
相移键控:利用载波的相位变化来传递数字信息,而振幅和频率保持不变。在2PSK 中,通常用初始相位0和π分别表示二进制“1”和“0”。因此,2PSK 信号的时域表达式为
)cos()(2n c psk t A t e ?ω+= (2-1)
其中,n ?表示第n 个符号的绝对相位[1]:
??
?=”时
发送“”时发送“100π
?n
因此,上式可以改写为
2cos 0()cos 1c psk c A t e t A t ωω?=?-?发送“”时
发送“”
时
由于表示信号的两种码元的波形相同极性相反,故2PSK 信号一般可以表述为一个双极性全占空比矩形脉冲序列与一个正弦载波的相乘,即
t t S t e c psk ωcos )()(2= (2-2)
其中)()(s n
n
nT t g a
t S -=
∑,g(t)是脉宽为Ts 的单个矩形脉冲,而n a 的统计特性为
n a =1(概率为P), n a =0(概率为1-P)。即发送二进制符号0时,)(2t e psk 取0 相位,发送二
进制符号1时,)(2t e psk 取π相位。这种以载波的不同相位直接去表示相应二进制数字信号的调制方式,称为绝对相移方式。
2.2 2PSK 数字解调过程分析
2PSK 信号的解调方法是相干解调法[2]。由于PSK 信号本身就是利用相位传递信息的,
所以在接收端必须利用信号的相位信息来解调信号。图中经过带通滤波(滤除信道噪声)的信号在相乘器中与本地载波相乘,然后用低通滤波器滤除高频分量,再进行抽样判决。判决器是按极性来判决的。即正抽样值判为1,负抽样值判为0。
带通滤波器
相乘器
低通滤波器
抽样
判决器定时脉冲
输出
)
(2t e PSK t
c ωcos a
b
c
d
e
图2-3 2PSK 相干解调系统框图
图2-4 2PSK 信号相干解调各点时间波形
带通滤波器的意义是让有用信号(已调信号)通过,滤除一部分噪声,所以有用信号在a 处得到信号为
()()c o s c a t s t t ω
= (2-3) 假设相干载波的基准相位与2PSK 信号的调制载波的基准相位一致(通常默认为0相位)。所以得到下式
2211
()()cos ()cos ()()cos 222
PKS c c c c t e t t s t t s t s t t ωωω===
+ (2-4) 通过低通滤波器后
2
1()()2
d t s t =
(2-5) 最后通过抽样判决器恢复出数字信号。
可见,2PSK 信号相干解调的过程实际上是输入已调信号与本地载波信号进行极性比较的过程,故常称为极性比较法解调。 由于2PSK 信号实际上是以一个固定初相的末调载波为参考的,因此,解调时必须有与此同频同相的同步载波。如果同步载波的相位发生变化,如0相位变为π相位或π相位变为0相位,则恢复的数字信息就会发生“0”变“1”或“1”变“0”,从而造成错误的恢复。这种因为本地参考载波倒相,而在接收端发生错误恢复的现象称为“倒
π”现象或“反向工作”现象。绝对移相的主要缺点是容易产生相位模糊,造成反向工作。这也是它实际应用较少的主要原因。
2.3 2PSK 相干解调系统性能分析
带通滤波器
相乘器
低通滤波器
抽样判决器
定时脉冲
输出
t
c ωcos 2发送端
信道
)(t s T )
(t n i )
(t y i )
(t y )
(t x e
P
图2-5 2PSK 相干解调系统性能原理方框图
在实际通信系统中往往存在噪声,噪声会对判决值产生影响,即会产生误码率,一般假设信道的噪声为高斯白噪声,下面讨论2PSK 解调器在高斯白噪声干扰下的误码率[3]:
在AWGN 信道下BPSK 信号相干解调的理论误码率为:
1
()
2e P erfc r =
(2-6) 其中r 为信噪比2
2
2n
a r σ=。 在大信噪比(1)r →条件下,上式可近似为:
12r
e P e r
π-=
(2-7)
3 设计实现
3.1 系统设计框图
图3-1 系统设计框图
3.2 设计思路及过程
本设计主要是通过MATLAB 来实现整个2PSK 系统,在用MATLAB 语言编程的时候主要分为以下几个部分。 3.2.1 2PSK 调制部分
(1)通过码型变换产生双极性数字基带信号。首先调用MA TLAB 的rand 函数产生一组随机序列,然后将离散的随机序列变换成单极性的二进制数字基带信号,将单极性信号乘以2然后减去1即可得到我们所需要的二进制双极性数字基带信号。其中单(双)极性码元宽度为1,每个码元采样250点即采样间隔为1/250。
(2)载波信号的产生。采用载频为c f =1Hz 的余弦载波信号cos(2t)c f π***,初始相位设为0,使得载波周期与码元宽度相同且均为1。
(3)通过随机二进制双极性数字基带信号与载波信号相乘得到2PSK 信号(0变1不变):
psk=Bipolar_NRZ.*carrier_signal;
(4)已调信号通过信道传输时会受到噪声影响,我们通过MA TLAB 的awgn 函数来模拟高斯白噪声与已调信号相加的过程,在这里我们只考虑加性噪声,不考虑乘型噪声。其中添加的高斯白噪声是由y1=awgn(psk,10)实现,其中awgn 为加性高斯白噪声信道模型,信道的信
随机产生20位二进制单极性码
单极性码转换为双极性码
2PSK 调制
信 道
加性AWGN
相 干
解 调
抽 样
判 决
低 通
滤 波 频 谱
分 析
输 出
2PSK 误码率 仿真
噪比为20。
3.2.2 2PSK解调部分
(1)相干解调的实现过程是将接收机收到信号通过乘法器与载波信号相乘即
y2=y1.*carrier_signal
(2)用MA TLAB来设计理想的巴特沃斯模拟低通滤波器,由于载波信号为1HZ,而要滤去的高频信号为2HZ,故设通带截止频率1HZ,阻带截止频率2HZ。(3)进行抽样判决,对每一个码元宽度中间值作判决抽样,增加抽样成功率。若判决值大于0,则输出值置为1,否则置为0。
(3)求解误码率,利用公式(2-6)可以计算误码率的理论值,信噪比snrdB是从-10到10变化,将输入的随机二进制信号与抽样判决值进行比较,误码率即为误码数与码元总数的比值。
4、源程序及相应实验结果
clear all;
close all;
clc;
max=10
g=zeros(1,max);
g=randint(1,max);%长度为max的随机二进制序列
cp=[];mod1=[];f=2*2*pi;t=0:2*pi/199:2*pi;
for n=1:length(g);
if g(n)==0;
A=zeros(1,200);%每个值200个点
else g(n)==1;
A=ones(1,200);
end
cp=[cp A]; %s(t),码元宽度200
c=cos(f*t);%载波信号
mod1=[mod1 c];%与s(t)等长的载波信号,变为矩阵形式
end
figure(1);subplot(4,2,1);plot(cp);grid on;
axis([0 200*length(g) -2 2]);title('二进制信号序列');
cm=[];mod=[];
for n=1:length(g);
if g(n)==0;
B=ones(1,200);%每个值200个点
c=cos(f*t); %载波信号
else g(n)==1;
B=ones(1,200);
c=cos(f*t+pi); %载波信号
end
cm=[cm B]; %s(t),码元宽度200
mod=[mod c]; %与s(t)等长的载波信号
end
tiaoz=cm.*mod;%e(t)调制
figure(1);subplot(4,2,2);plot(tiaoz);grid on;
axis([0 200*length(g) -2 2]);title('2PSK调制信号');
figure(2);subplot(4,2,1);plot(abs(fft(cp)));
axis([0 200*length(g) 0 400]);title('原始信号频谱');
figure(2);subplot(4,2,2);plot(abs(fft(tiaoz)));
axis([0 200*length(g) 0 400]);title('2PSK信号频谱');
%带有高斯白噪声的信道
tz=awgn(tiaoz,10);%信号tiaoz中加入白噪声,信噪比为10
figure(1);subplot(4,2,3);plot(tz);grid on
axis([0 200*length(g) -2 2]);title('通过高斯白噪声信道后的信号'); figure(2);subplot(4,2,3);plot(abs(fft(tz)));
axis([0 200*length(g) 0 400]);title('加入白噪声的2PSK信号频谱'); jiet=2*mod1.*tz;%同步解调
figure(1);subplot(4,2,4);plot(jiet);grid on
axis([0 200*length(g) -2 2]);title('相乘后信号波形')
figure(2);subplot(4,2,4);plot(abs(fft(jiet)));
axis([0 200*length(g) 0 400]);title('相乘后信号频谱');
%低通滤波器
fp=500;fs=700;rp=3;rs=20;fn=11025;
ws=fs/(fn/2); wp=fp/(fn/2);%计算归一化角频率
[n,wn]=buttord(wp,ws,rp,rs);%计算阶数和截止频率
[b,a]=butter(n,wn);%计算H(z)
figure(4);freqz(b,a,1000,11025);subplot(2,1,1);
axis([0 4000 -100 3 ])
title('LPF幅频相频图');
jt=filter(b,a,jiet);
figure(1);subplot(4,2,5);plot(jt);grid on
axis([0 200*length(g) -2 2]);title('经低通滤波器后信号波形') figure(2);subplot(4,2,5);plot(abs(fft(jt)));
axis([0 200*length(g) 0 400]);title('经低通滤波器后信号频谱'); %抽样判决
for m=1:200*length(g);
if jt(m)<0;
jt(m)=1;
else jt(m)>=0;
jt(m)=0;
end
end
figure(1);subplot(4,2,6);plot(jt);grid on
axis([0 200*length(g) -2 2]);title('经抽样判决后信号s^(t)波形') figure(2);subplot(4,2,6);plot(abs(fft(jt)));
axis([0 200*length(g) 0 400]);title('经抽样判决后信号频谱'); 5:实验结果:
0500100015002000-2
2二进制信号序列0
500100015002000-20
22PSK 调制信号
0500100015002000-20
2通过高斯白噪声信道后的信号0500100015002000-20
2相乘后信号波形
500
100015002000
-20
2经低通滤波器后信号波形
0500100015002000
-20
2经抽样判决后信号s (t)波形
05001000150020000
200
400原始信号频谱05001000150020000
200
4002PSK 信号频谱
05001000150020000200
400加入白噪声的2PSK 信号频谱0
5001000150020000200
400相乘后信号频谱
5001000150020000200
400经低通滤波器后信号频谱
0500100015002000
0200
400经抽样判决后信号频谱
01000
20003000
40005000
-800
-600-400-200
Frequency (Hz)
P h a s e (d e g r e e s )
5001000
150020002500
300035004000
-100
-50
Frequency (Hz)
M a g n i t u d e (d B )
LPF 幅频相频图
500100015002000
-202二进制信号序列
050010001500
2000-2022PSK 调制信号
0500100015002000-202通过高斯白噪声信道后的信号
500100015002000
-202相乘后信号波形0500100015002000-202经低通滤波器后信号波形
0500100015002000-202经抽样判决后信号s (t)波形
500100015002000-202二进制信号序列
0500100015002000
-2022PSK 调制信号
500100015002000-202通过高斯白噪声信道后的信号
500100015002000-202相乘后信号波形0
500
1000
1500
2000
-202
经低通滤波器后信号波形
500
1000
1500
2000
-202
经抽样判决后信号s (t)波形
500100015002000-202二进制信号序列0
500100015002000
-20
22PSK 调制信号0500100015002000-202通过高斯白噪声信道后的信号0500100015002000-202相乘后信号波形
0500100015002000
-2
02经低通滤波器后信号波形0500100015002000
-2
02经抽样判决后信号s (t)波形
总结
在这次的课程设计过程当中,物品清楚的认识到了自己在专业基础知识方面的不足,过程当中遇到了太多的困难,但是都通过老师与同学的热心帮助不断的改进,最终还是度过一个又一个困难,完成可课程设计的任务。,例如,在低通滤波的过程中,主要目的是滤去高频分量,滤去载波成分,所以对于低通滤波器的截止频率的设置较为关键。而在2PSK的调制与解调中所用信号为双极性的信号,因此要将在本次设计中产生的单极性信号经过码的变化形成双极性码来传输。本次设计只是按理论上的知识结构进行简单地系统构建,目的是明确数字基带传输的原理及过程,而对于具体问题,例如,实际中信道噪声一般为高斯白噪声,本次设计为简便并未采用而是用rand函数产生了随机噪声信号。
总之,通过本次的课程设计我掌握了相关的知识,这为我以后的工作学习奠定了良好的基础。感谢我的老师以及同学,谢谢一路有你们相伴。你们辛苦了。
参考文献
[1] 郝建军,桑林.数字通信[M].北京:人民邮电出版社,2002(2):206~207. [1] 樊昌信,曹丽娜.通信原理[M].北京:国防工业出版社,2013(6):188~190.
目录
1:设计概述 (1)
1.1:设计背景 (1)
1.2:设计内容以及要求 (1)
1.3设计目的 (1)
2、设计原理 (1)
2.1 2PSK数字调制过程分析 (1)
2.2 2PSK数字解调过程分析 (2)
2.3 2PSK相干解调系统性能分析 (4)
3 设计实现 (5)
3.1 系统设计框图 (5)
3.2 设计思路及过程 (5)
3.2.1 2PSK调制部分 (5)
3.2.2 2PSK解调部分 (6)
4、源程序及相应实验结果 (6)
5:实验结果: (8)
总结 (11)
参考文献 (13)
通信原理课程设计说明书
题目:2PSK设计与仿真
学生姓名:杨朋飞
学号: 201206020231
院(系):电气与信息工程学院
专业:电子信息科学与技术
指导教师:王明伟
2015 年 7月 3日
陕西科技大学课程设计成绩考核表
课程设计名称: 2PSK设计与仿真
专业:电子信息科学与技术班级:电信122班学号:201206020231姓名杨
朋飞
下表由指导教师按实际情况进行填写:
考核内容所占比例得分
设计方案15%
说明书15%
图纸、程序、计算、作品等的完成质量30%
创新与发挥情况10%
答辩(口试)情况20%
出勤率10%
指导教师
评语
总评成绩评定等级
成绩与等级对应表
优
90-100
良
80-89
中等
70-79
及格
60-69
不及格
59分以下
指导教师签字:教研室主任签字:200 年月
摘要
数字传输系统中,数字信号对高频载波进行调制,变为频带信号,通过信道传输,在接收端解调后恢复成数字信号,由于大多数实际信号都是带通型的,所以必须先用数字频带信号对载波进行调制,形成数字调制信号再进行传输,因此,调制解调技术是实现现代通信的重要手段。数字调制地实现,促进了通信的飞速发展。研究数字通信调制理论,提供有效调制方法有着重要意义。实现调试解调的方法有很多种,本文应用了键控法产生调制与解调信号。数字相位调制又称相移键控记作PSK(Phase Shift Keying),二进制相移键控记作2PSK,它们是利用载波振荡相位的变化来传送数字信号的,在二进制数字解调中,当正弦载波的相位随二进制数字基带信号离散变化,则就产生二进制移相键控2PSK信号。重点介绍了2PSK 的调制与解调的工作原理,以及通过MATLAB进行设计和仿真,并且分析了各阶段信号的频谱及误码率。
关键词数字调制与解调;2PSK;MATLAB仿真
课程设计报告 2015~2016学年第一学期 操作系统综合实践课程设计 实习类别课程设计 学生姓名李旋 专业软件工程 学号130521105 指导教师崔广才、祝勇 学院计算机科学技术学院 二〇一六年一月
- 1 -
- 2 -
一、概述 一个目录文件是由目录项组成的。每个目录项包含16B,一个辅存磁盘块(512B)包含32个目录项。在目录项中,第1、2字节为相应文件的外存i节点号,是该文件的内部标识;后14B为文件名,是该文件的外部标识。所以,文件目录项记录了文件内、外部标识的对照关系。根据文件名可以找到辅存i节点号,由此便得到该文件的所有者、存取权、文件数据的地址健在等信息。UNIX 的存储介质以512B为单位划分为块,从0开始直到最大容量并顺序加以编号就成了一个文件卷,也叫文件系统。UNIX中的文件系统磁盘存储区分配图如下: 本次课程设计是要实现一个简单的模拟Linux文件系统。我们在内存中开辟一个虚拟磁盘空间(20MB)作为文件存储器,并将该虚拟文件系统保存到磁盘上(以一个文件的形式),以便下次可以再将它恢复到内存的虚拟磁盘空间中。文件存储空间的管理可采用位示图方法。 二、设计的基本概念和原理 2.1 设计任务 多用户、多级目录结构文件系统的设计与实现。可以实现下列几条命令login 用户登录 logout 退出当前用户 dir 列文件目录 creat 创建文件 delete 删除文件 open 打开文件 close 关闭文件 - 3 -
read 读文件 write 写文件 mkdir 创建目录 ch 改变文件目录 rd 删除目录树 format 格式化文件系统 Exit 退出文件系统 2.2设计要求 1) 多用户:usr1,usr2,usr3,……,usr8 (1-8个用户) 2) 多级目录:可有多级子目录; 3) 具有login (用户登录)4) 系统初始化(建文件卷、提供登录模块) 5) 文件的创建:create (用命令行来实现)6) 文件的打开:open 7) 文件的读:read8) 文件的写:write 9) 文件关闭:close10) 删除文件:delete 11) 创建目录(建立子目录):mkdir12) 改变当前目录:cd 13) 列出文件目录:dir14) 退出:logout 新增加的功能: 15) 删除目录树:rd 16) 格式化文件系统:format 2.3算法的总体思想 - 4 -
华东交通大学MATLAB程序设计报告书 课题名称:基于MATLAB的粒子群优化算法的实现 姓名: 学号:20160280800014 专业:控制科学与工程 2016年 11月 20日
基于MATLAB的粒子群优化算法的实现 一、课程选题目的 本次课程设计的课题为《基于MATLAB的粒子群优化算法的实现》,主要为学会运用MATLAB对实际算法编程,加深对粒子群优化算法的理解,并为今后熟练使用MA TLAB进行系统的分析仿真和设计奠定基础。数值计算分析可以帮助更深入地理解理论知识,并为将来使用MA TLAB进行各领域数值分析分析和实际应用打下基础。 此次课程主要是为了进一步熟悉对MATLAB软件的使用,以及学会利用MA TLAB对数值运算这种实际问题进行处理,将理论应用于实际,加深对它的理解。 二、粒子群优化算法原理 优化是科学研究、工程技术和经济管理等领域的重要研究工具。它所研究的问题是讨论在众多的方案中寻找最优方案。例如,工程设计中怎样选择设计参数,使设计方案既满足设计要求又能降低成本;资源分配中,怎样分配有限资源,使分配方案既能满足各方面的基本要求,又能获得好的经济效益。在人类活动的各个领域中,诸如此类,不胜枚举。优化这一技术,正是为这些问题的解决,提供理论基础和求解方法,它是一门应用广泛、实用性很强的科学。近十余年来,粒子群优化算法作为群体智能算法的一个重要分支得到了广泛深入的研究,在路径规划等许多领域都有应用。 2.1 粒子群优化算法的起源 粒子群优化(PSO)算法是由Kennedy和Eberhart于1995年用计算机模拟鸟群觅食这一简单的社会行为时,受到启发,简化之后而提出的。 设想这样一个场景:一群鸟随机的分布在一个区域中,在这个区域里只有一块食物。所有的鸟都不知道食物在哪里。但是他们知道当前的位置离食物还有多远。那么找到食物的最优策略是什么呢。最简单有效的方法就是追寻自己视野中目前离食物最近的鸟。如果把食物当作最优点,而把鸟离食物的距离当作函数的适应度,那么鸟寻觅食物的过程就可以当作一个函数寻优的过程。鱼群和鸟群的社会行为一直引起科学家的兴趣。他们以特殊的方式移动、同步,不会相互碰撞,整体行为看上去非常优美。生物学家CargiReynolds提出了一个非常有影响的鸟群聚集模型。在他的模拟模型boids中,每一个个体遵循:避免与邻域个体相冲撞、匹配邻域个体的速度、试图飞向感知到的鸟群中心这三条规则形成简单的非集中控制算法驱动鸟群的聚集,在一系列模拟实验中突现出了非常接近现实鸟群聚集行为的现象。该结果显示了在空中回旋的鸟组成轮廓清晰的群体,以及遇到障碍物时鸟群的分裂和再度汇合过程。由此受到启发,经过简化提出了粒子群优化算法。 2.2粒子群优化算法的原理 在粒子群优化算法中,每个优化问题的潜在解都是搜索空间中的一只鸟,称之为“粒子”。所有的粒子都有一个由被优化的函数决定的适应值,每个粒子还有一个速度决定他们飞翔的方向和距离。然后粒子们就追随当前的最优粒子在解空间中搜索。优化开始时先初始化为一群随机粒子(随机解)。然后通过迭代找到最优解。在每一次迭代中,粒子通过跟踪两个极值来更新自己。第一个极值就是整个种群目前找到的最优解。这个极值是全局极值。另外也可以不用整个种群而只是用其中一部分作为粒子的邻居,那么在所有邻居中的极值就是局部极值。第二个极值是粒子本身所找到的最优解,称为个体极值。这是因为粒子仅仅通过跟踪全局极值或者局部极值来更新位置,不可能总是获得较好的解。这样在优化过程中,粒子在追随全局极值或局部极值的同时追随个体极值则圆满的解决了这个问题。这就是粒子群优化
控制系统仿真课程设计 (2011级) 题目控制系统仿真课程设计学院自动化 专业自动化 班级 学号 学生姓名 指导教师王永忠/刘伟峰 完成日期2014年6月
控制系统仿真课程设计一 ———交流异步电机动态仿真 一 设计目的 1.了解交流异步电机的原理,组成及各主要单元部件的原理。 2. 设计交流异步电机动态结构系统; 3.掌握交流异步电机调速系统的调试步骤,方法及参数的整定。 二 设计及Matlab 仿真过程 异步电机工作在额定电压和额定频率下,仿真异步电机在空载启动和加载过程中的转速和电流变化过程。仿真电动机参数如下: 1.85, 2.658,0.2941,0.2898,0.2838s r s r m R R L H L H L H =Ω=Ω===, 20.1284Nm s ,2,380,50Hz p N N J n U V f =?===,此外,中间需要计算的参数如下: 21m s r L L L σ=-,r r r L T R =,22 2 s r r m t r R L R L R L +=,10N m TL =?。αβ坐标系状态方程: 其中,状态变量: 输入变量: 电磁转矩: 2p m p s r s L r d ()d n L n i i T t JL J βααωψψβ=--r m r r s r r d 1d L i t T T ααβαψψωψ=--+r m r r s r r d 1d L i t T T ββαβψψωψ=-++22s s r r m m m s r r s s 2r r r r d d i R L R L L L L i u t L T L L ααβαα σψωψ+=+-+22 s s r r m m m s r r s s 2 r r r r d d i R L R L L L L i u t L T L L ββαββ σψωψ+=--+[ ] T r r s s X i i αβαβωψψ=[ ] T s s L U u u T αβ=()p m e s s s s r n L T i i L βααβ ψψ=-
2DPSK调制与解调系统的仿真 设计原理 (1) 2DPSK信号原理 1.1 2DPSK信号原理 2DPSK方式即是利用前后相邻码元的相对相位值去表示数字信息的一种方式。现假设用Φ表示本码元初相与前一码元初相之差,并规定:Φ=0表示0码,Φ=π表示1码。则数字信息序列与2DPSK信号的码元相位关系可举例表示如2PSK信号是用载波的不同相位直接去表示相应的数字信号而得出的,在接收端只能采用相干解调,它的时域波形图如图2.1所示。 图1.1 2DPSK信号 在这种绝对移相方式中,发送端是采用某一个相位作为基准,所以在系统接收端也必须采用相同的基准相位。如果基准相位发生变化,则在接收端回复的信号将与发送的数字信息完全相反。所以在实际过程中一般不采用绝对移相方式,而采用相对移相方式。定义为本码元初相与前一码元初相之差,假设: →数字信息“0”; →数字信息“1”。 则数字信息序列与2DPSK信号的码元相位关系可举例表示如下: 数字信息: 1 0 1 1 0 1 1 1 0 1 DPSK信号相位:0
或 : 1.2 2DPSK 信号的调制原理 一般来说,2DPSK 信号有两种调试方法,即模拟调制法和键控法。2DPSK 信号的的模拟调制法框图如图1.2.1所示,其中码变换的过程为将输入的单极性不归零码转换为双极性不归零码。 图1.2.1 模拟调制法 2DPSK 信号的的键控调制法框图如图1.2.2所示,其中码变换的过程为将输入的基带信号差分,即变为它的相对码。选相开关作用为当输入为数字信息“0” 时接相位0,当输入数字信息为“1”时接pi 。 图1.2.2 键控法调制原理图 1.3 2DPSK 信号的解调原理 2DPSK 信号最常用的解调方法有两种,一种是极性比较和码变换法,另一种是差分相干解调法。 码变换 相乘 载波 s(t) e o (t)
、 北京理工大学珠海学院 课程设计任务书 2010 ~2011 学年第 2学期 学生姓名:林泽佳专业班级:08自动化1班指导教师:钟秋海工作部门:信息学院一、课程设计题目 : 《控制系统建模、分析、设计和仿真》 本课程设计共列出10个同等难度的设计题目,编号为:[0号题]、[1号题]、[2号题]、[3号题]、[4号题]、[5号题]、[6号题]、[7号题]、[8号题]、[9号题]。 学生必须选择与学号尾数相同的题目完成课程设计。例如,学号为8xxxxxxxxx2的学生必须选做[2号题]。 二、课程设计内容 (一)《控制系统建模、分析、设计和仿真》课题设计内容|
! " [2 有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。具体要求见(二)。 (二)《控制系统建模、分析、设计和仿真》课题设计要求及评分标准【共100分】 , 1、求被控对象传递函数G(s)的MATLAB描述。(2分) 2、求被控对象脉冲传递函数G(z)。(4分) 3、转换G(z)为零极点增益模型并按z-1形式排列。(2分) 4、确定误差脉冲传递函数Ge(z)形式,满足单位加速度信号输入时闭环稳态误差为零和实际 闭环系统稳定的要求。(6分) 5、确定闭环脉冲传递函数Gc(z)形式,满足控制器Dy(z)可实现、最少拍和实际闭环系统稳 定的要求。(8分)
6、根据4、5、列写方程组,求解Gc(z)和Ge(z)中的待定系数并最终求解Gc(z)和Ge(z) 。 (12分) 7、求针对单位加速度信号输入的最少拍有波纹控制器Dy(z)并说明Dy(z)的可实现性。 (3分) ! 8、用程序仿真方法分析加速度信号输入时闭环系统动态性能和稳态性能。(7分) 9、用图形仿真方法(Simulink)分析单位加速度信号输入时闭环系统动态性能和稳态性能。 (8分) 10、确定误差脉冲传递函数Ge(z)形式,满足单位速度信号输入时闭环稳态误差为零和实际 闭环系统稳定的要求。(6分) 11、确定闭环脉冲传递函数Gc(z)形式,满足控制器Dw(z)可实现、无波纹、最少拍和实际 闭环系统稳定的要求。(8分) 12、根据10、11、列写方程组,求解Gc(z)和Ge(z)中的待定系数并最终求解Gc(z)和Ge(z) 。 (12分) 13、求针对单位速度信号输入的最少拍无波纹控制器Dw(z)并说明Dw(z)的可实现性。(3分) 14、用程序仿真方法分析单位速度信号输入时闭环系统动态性能和稳态性能。(7分) 15、用图形仿真方法(Simulink)分析单位速度信号输入时闭环系统动态性能和稳态性能。 & (8分) 16、根据8、9、14、15、的分析,说明有波纹和无波纹的差别和物理意义。(4分) 三、进度安排 6月13至6月14:下达课程设计任务书;复习控制理论和计算机仿真知识,收集资料、熟悉仿真工具;确定设计方案和步骤。 6月14至6月16:编程练习,程序设计;仿真调试,图形仿真参数整定;总结整理设计、 仿真结果,撰写课程设计说明书。 6月16至6月17:完成程序仿真调试和图形仿真调试;完成课程设计说明书;课程设计答 辩总结。 [ 四、基本要求
湖南科技大学计算机科学与工程学院 操作系统课程设计报告 ******** *** 目录 实验一 Windows 进程管理 实验二 Linux 进程管理 实验三 互斥与同步 实验四 银行家算法的模拟与实现 实验五 内存管理 指导老师: *** 完成时间: **** ** **
实验六磁盘调度 实验七进程间通信 实验一 Windows进程管理 一、实验目的 1 )学会使用VC编写基本的Win3 2 Consol Application (控制台应用程序)。 2)2)通过创建进程、观察正在运行的进程和终止进程的程序设计和调试操作,进一步熟 悉操作系统的进程概念,理解Windows进程的"一生”。 3)3)通过阅读和分析实验程序,学习创建进程、观察进程、终止进程以及父子进程同步 的基本程序设计方法。 二、实验内容和步骤 (1)编写基本的 Win32 Consol Application 步骤1:登录进入 Windows系统,启动VC++ 6.0。 步骤2:在“ FILE”菜单中单击“ NEW”子菜单,在“ projects ”选项卡中选择 “Win32 ConsolApplication ”,然后在“ Project name 处输入工程名,在“Location ”处输入工程目录。创建一个新的控制台应用程序工程。 步骤3:在“ FILE”菜单中单击“ NEW”子菜单,在“ Files ”选项卡中选择“ C++ Source File ” ,然后在“ File ”处输入C/C++源程序的文件名。 步骤4:将清单1-1所示的程序清单复制到新创建的C/C++源程序中。编译成可执行文件。 步骤5 :在“开始”菜单中单击“程序” -“附件”-“命令提示符”命令,进入Windows“命令提示符”窗口,然后进入工程目录中的 debug子目录,执行编译好的可执行程序,列出运行结果(如果运行不成功,则可能的原因是什么?) 如果运行不成功可能是路径有问题或者没有通过编译。
上海电力学院 计算机操作系统原理 课程设计报告 题目名称:编写程序模拟虚拟存储器管理 姓名:杜志豪.学号: 班级: 2012053班 . 同组姓名:孙嘉轶 课程设计时间:—— 评语: 成绩: 目录 一、设计内容及要求 (4) 1. 1 设计题目 (4) 1.2 使用算法分析: (4)
1. FIFO算法(先进先出淘汰算法) (4) 1. LRU算法(最久未使用淘汰算法) (5) 1. OPT算法(最佳淘汰算法) (5) 分工情况 (5) 二、详细设计 (6) 原理概述 (6) 主要数据结构(主要代码) (6) 算法流程图 (9) 主流程图 (9) Optimal算法流程图 (10) FIFO算法流程图 (10) LRU算法流程图 (11) .1源程序文件名 (11) . 2执行文件名 (11) 三、实验结果与分析 (11) Optimal页面置换算法结果与分析 (11) FIFO页面置换算法结果与分析 (16) LRU页面置换算法结果与分析 (20) 四、设计创新点 (24) 五、设计与总结 (27)
六、代码附录 (27) 课程设计题目 一、设计内容及要求 编写程序模拟虚拟存储器管理。假设以M页的进程分配了N
块内存(N 课程设计任务书 学生姓名:董航专业班级:电信1006班 指导教师:阙大顺,李景松工作单位:信息工程学院 课程设计名称:Matlab应用课程设计 课程设计题目:Matlab运算与应用设计5 初始条件: 1.Matlab6.5以上版本软件; 2.课程设计辅导资料:“Matlab语言基础及使用入门”、“Matlab及在电子信息课程中的应 用”、线性代数及相关书籍等; 3.先修课程:高等数学、线性代数、电路、Matlab应用实践及信号处理类相关课程等。 要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写等具体要求) 1.课程设计内容:根据指导老师给定的7套题目,按规定选择其中1套完成; 2.本课程设计统一技术要求:研读辅导资料对应章节,对选定的设计题目进行理论分析, 针对具体设计部分的原理分析、建模、必要的推导和可行性分析,画出程序设计框图,编写程序代码(含注释),上机调试运行程序,记录实验结果(含计算结果和图表),并对实验结果进行分析和总结。具体设计要求包括: ①初步了解Matlab、熟悉Matlab界面、进行简单操作; ②MATLAB的数值计算:创建矩阵矩阵运算、多项式运算、线性方程组、数值统计; ③基本绘图函数:plot, plot3, mesh, surf等,要求掌握以上绘图函数的用法、简单图形 标注、简单颜色设定等; ④使用文本编辑器编辑m文件,函数调用; ⑤能进行简单的信号处理Matlab编程; ⑥按要求参加课程设计实验演示和答辩等。 3.课程设计说明书按学校“课程设计工作规范”中的“统一书写格式”撰写,具体包括: ①目录; ②与设计题目相关的理论分析、归纳和总结; ③与设计内容相关的原理分析、建模、推导、可行性分析; ④程序设计框图、程序代码(含注释)、程序运行结果和图表、实验结果分析和总结; ⑤课程设计的心得体会(至少500字); ⑥参考文献(不少于5篇); ⑦其它必要内容等。 时间安排:1.5周(分散进行) 参考文献: [1](美)穆尔,高会生,刘童娜,李聪聪.MA TLAB实用教程(第二版) . 电子工业出版社,2010. [2]王正林,刘明.精通MATLAB(升级版) .电子工业出版社,2011. [3]陈杰. MA TLAB宝典(第3版) . 电子工业出版社,2011. [4]刘保柱,苏彦华,张宏林. MATLAB 7.0从入门到精通(修订版) . 人民邮电出版社,2010. 指导教师签名:年月日 系主任(或责任教师)签名:年月日 西安邮电大学 专业课程设计报告书 院系名称:电子工程学院学生姓名:李群学号05113096 专业名称:光信息科学与技术班级:光信1103 实习时间:2014年4月8日至2014年4月 18日 一、课程设计题目: 用matlab 仿真光束的传输特性。 二、任务和要求 1、用matlab 仿真光束通过光学元件的变换。 ① 设透镜材料为k9玻璃,对1064nm 波长的折射率为1.5062,镜片中心厚度为3mm ,凸面曲 率半径,设为100mm ,初始光线距离透镜平面20mm 。用matlab 仿真近轴光线(至少10条)经过平凸透镜的焦距,与理论焦距值进行对比,得出误差大小。 ② 已知透镜的结构参数为101=r ,0.11=n ,51=d ,5163.121==' n n (K9玻璃), 502-=r ,0.12=' n ,物点A 距第一面顶点的距离为100,由A 点计算三条沿光轴夹角分别为10、20、 30的光线的成像。试用Matlab 对以上三条光线光路和近轴光线光路进行仿真,并得出实际光线的球差大小。 ③ 设半径为1mm 的平面波经凸面曲率半径为25mm ,中心厚度3mm 的平凸透镜。用matlab 仿 真平面波在透镜几何焦平面上的聚焦光斑强度分布,计算光斑半径。并与理论光斑半径值进行对比,得出误差大小。(方法:采用波动理论,利用基尔霍夫—菲涅尔衍射积分公式。) 2、用MATLAB 仿真平行光束的衍射强度分布图样。(夫朗和费矩形孔衍射、夫朗和费圆孔衍射、夫朗和费单缝和多缝衍射。) 3、用MATLAB 仿真厄米—高斯光束在真空中的传输过程。(包括三维强度分布和平面的灰度图。) 4、(补充题)查找文献,掌握各类空心光束的表达式,采用费更斯-菲涅尔原理推导各类空心光束在真空中传输的光强表达式。用matlab 对不同传输距离处的光强进行仿真。 三、理论推导部分 第一大题 (1)十条近轴光线透过透镜时,理想情况下光线汇聚透镜的焦点上,焦点到像方主平面的距离为途径的焦距F ,但由于透镜的折射率和厚度会影响光在传输过程中所走的路径(即光程差Δ)。在用MATLAB 仿真以前先计算平行光线的传输路径。,R 为透镜凸面的曲率半径,h 为入射光线的高度,θ1为入射光线与出射面法线的夹角,θ2为出射光线与法线的夹角,n 为透镜材料的折射率。设透镜的中心厚度为d ,则入射光线经过透镜的实际厚度为:L=(R-d) 光线的入射角为:sinq1=h/R 折射角度满足:sinq2=nsinq1 而实际的光束偏折角度为:θ2-θ1。 由此可以看出,当平行光线照射透镜时,在凸面之前光线平行于光轴,在凸面之后发生了偏折,于光轴交汇一点,这一点成为焦点f ,折线的斜率为(-tan(θ2-θ1))。 (2)根据题意可得,本题所讨论的是与光轴夹角不同的三条光线,经过透镜的两次反射后的成像问题。利用转面公式计算。 《产品系统设计课程设计》教学大纲 课程名称:产品系统设计 课程代码: 适用专业:工业设计 修读方式:必修 课程类别:实践性教学环节 学时:2周 学分:1 先修或同修课程:产品设计程序与方法、图形创意、人机工程学、透视学等 后续课程:产品概念设计、产品创新设计等 执笔人:郭淑颖 一、制定课程设计大纲的依据 根据吉林工程技术师范学院《产品系统设计》课程教学大纲制定。 二、课程设计在专业人才能力培养中的作用及教学目的 本课程设计是工业设计专业学生必修的课程,是实践性教学环节,对培养学生的综合设计能力起到很大的作用。本实践环节强调学生综合运用工业设计专业已经学习过的专业知识,进行新产品的系统化设计。 本课程设计的教学目的: 1. 能熟练运用计算机辅助设计课程及其他相关课程中的中的基本理论以及专业课知识,实践一个产品从市场调研、确定设计方案到设计展开的设计过程,能够对产品的各大设计要素进行展开设计。。 2. 能根据被表达的产品的形态、功能、结构等要求,运用软件的基本原理和方法,完成设计,完成产品系统设计。 3. 培养学生熟悉并运用有关资料、教程、网络等技术资料的能力。 4. 进一步培养学生通过市场调研,挖掘市场需求,确定设计方向和概念,并独立成该概念的系统设计。 三、教学基本要求 1. 课程设计的选题 选择难度一般的设计题目,建议给定5个或者以上设计题目,学生自选并组成设计小组,一个小组一起完成市场调研及分析,每个人根据自己的设计概念进行设计展开。 2. 指导教师 由担任本课程的教师(中级职称以上)担任指导教师,每个指导教师指导的学生人数原则上不超过一个班。指导教师负责课程设计的任务布置、指导及成绩评定等工作。 3. 学生 课程设计是在教师指导下由学生独立完成。每个学生都应该明确设计任务和要求,掌握设计进度。设计分阶段进行,每一阶段的设计都要认真检查,没有原则错误时才能继续进行下一段设计,以保证设计质量,循序完成设计任务。设计过程中要独立思考、深入钻研,主动地、创造性地进行设计,反对照抄照搬、敷衍塞责,容忍错误存在或依赖教师。要求设计态度严肃认真,有错必改。在设计思想、设计方法和设计技能等方面得到良好的训练。 四、课程设计内容、设计工作量及相关要求 1. 课程设计内容 设计题目参考:家具设计、家电设计、玩具设计、交通工具设计、办公用品设计等。具体设计内容包括: 1) 市场调研及调研分析,确定设计方向; 2) 方案设计,设计草图; 3) 设计展开,按设计要素进行展开设计; 4) 设计展示-草图、三视图、效果图; 5) 编写设计制作说明报告并进行设计答辩。 2. 课程设计的工作量 1) 最终设计效果图3张(A3图幅,产品效果图、产品场景图、展示效果图) 2) 设计报告说明书1份 说明书内容应包括:市场调研及分析;方案设计;设计展开;设计展示;整理造型表现完成的说明报告书。 3. 课程设计说明书 课程设计说明书是学生证明自己设计正确合理并供有关人员参考的文件,它是课程设计的重要组成部分。编写说明书也是科技工作者必须掌握的基本技能之一。因此,学生在校期间就应加强这方面的训练。课程设计说明书应在课程设计过程中逐步形成,课程设计结束时, 《计算机仿真及应用》课程设计报告书 学号:08057102,08057127 班级:自动化081 姓名陈婷,万嘉 目录 一、设计思想 二、设计步骤 三、调试过程 四、结果分析 五、心得体会 六、参考文献 选题一、 考虑如下图所示的电机拖动控制系统模型,该系统有双输入,给定输入)(t R 和负载输入)(t M 。 1、 编制MATLAB 程序推导出该系统的传递函数矩阵。 2、 若常系数增益为:C 1=Ka =Km =1,Kr =3,C2=0.8,Kb =1.5,时间常数T 1=5, T 2=0.5,绘制该系统的根轨迹、求出闭环零极点,分析系统的稳定性。若)(t R 和)(t M 分别为单位阶跃输入,绘制出该系统的阶跃响应图。(要求C 1,Ka ,Km ,Kr ,C2,Kb , T 1,T 2所有参数都是可调的) 一.设计思想 题目分析: 系统为双输入单输出系统,采用分开计算,再叠加。 要求参数均为可调,而matlb 中不能计算未赋值的函数,那么我们可以把参数设置为可输入变量,运行期间根据要求赋值。 设计思路: 使用append 命令连接系统框图。 选择‘参数=input('inputanumber:')’实现参数可调。 采用的方案: 将结构框图每条支路稍作简化,建立各条支路连接关系构造函数,运行得出相应的传递函数。 在得出传递函数的基础上,使用相应的指令求出系统闭环零极点、画出其根轨迹。 通过判断极点是否在左半平面来编程判断其系统是否稳定。 二.设计步骤 (1)将各模块的通路排序编号 (2)使用append命令实现各模块未连接的系统矩阵 (3)指定连接关系 (4)使用connect命令构造整个系统的模型 三.调试过程 出现问题分析及解决办法: 在调试过程出现很多平时不注意且不易寻找的问题,例如输入的逗号和分号在系统运行时不支持中文格式,这时需要将其全部换成英文格式,此类的程序错误需要细心。 在实现参数可调时初始是将其设为常量,再将其赋值进行系统运行,这样参数可调性差,后用‘参数=input('inputanumber:')’实现。 最后是在建立通路连接关系时需要细心。 四.结果分析 源代码: Syms C1 C2 Ka Kr Km Kb T1 T2 C1=input('inputanumber:') C2=input('inputanumber:') Ka=input('inputanumber:') Kr=input('inputanumber:') Km=input('inputanumber:') Kb=input('inputanumber:') T1=input('inputanumber:') T2=input('inputanumber:') G1=tf(C1,[0 1]); G2=tf(Ka*Kr,[0 1]); G3=tf(Km,[T1 1]); G4=tf(1,[T2 1]); G5=tf(1,[1 0]); G6=tf(-C2,1); G7=tf(-Kb,1); G8=tf(-1,1); Sys=append(G1,G2,G3,G4,G5,G6,G7,G8) Q=[1 0 0;2 1 6;3 2 7;4 3 8;5 4 0;6 5 0;7 4 0;8 0 0;]; INPUTS1=1; OUTPUTS=5; Ga=connect(Sys,Q,INPUTS1,OUTPUTS) INPUTS2=8; OUTPUTS=5; Gb=connect(Sys,Q,INPUTS2,OUTPUTS) rlocus(Ga) 课程设计 双闭环直流调速系统设计及仿真验证 学院年级:工程学院08级 组长:陈春明学号200830460102 08自动化1班成员一:陈木生学号 200830460103 08自动化1班 指导老师: 日期: 2012-2-28 华南农业大学工程学院 摘要 转速、电流双闭环调速系统是应用最广的直流调速系统,由于其静态性能良好,动态响应快,抗干扰能力强,因而在工程设计中被广泛地采用。现在直流调速理论发展得比较成熟,但要真正设计好一个双闭环调速系统并应用于工程设计却有一定的难度。 Matlab是一高性能的技术计算语言,具有强大的科学数据可视化能力,其中Simulink具有模块组态简单、性能分析直观的优点,方便了系统的动态模型分析。应用Simulink来研究双闭环调速系统,可以清楚地观察每个时刻的响应曲线,所以可以通过调整系统的参数来得出较为满意的波形,即良好的性能指标,这给分析双闭环调速系统的动态模型带来很大的方便。 本研究采用工程设计方法,并利用Matlab协助分析双闭环调速系统,依据自动控制系统快、准、稳的设计要求,重点分析系统的起动过程。 关键词:双闭环直流调速 Simulink 自动控制 目录 1、直流电机双闭环调速系统的结构分析....................... 1.1 双闭环调速系统的组成............................... 1.2 双闭环调速系统的结构.................................... 2 、建立直流电机双闭环调速系统的模型............................ 2.1 小型直流调速系统的指标及参数......................... 2.2 电流环设计............................................... 2.3 转速环设计................................................ 3、直流电动机双闭环调速系统的MATLAB仿真.................... 3.1 系统框图的搭建............................................. 3.2 PI控制器参数的设置...................................... 3.3 仿真结果.................................................... 4、结论与总结....................................................... 5、参考资料....................................................... 操作系统课程设计 (操作系统课程设计) 连续动态分区内存 管理模拟实现 学生姓名:韩慧 学生学号: 031140312 班级: 031140--3 0311401、02、03、04班制 二〇一三年十二月 目录 《操作系统》课程设计 (1) 引言 (3) 课程设计目的和内容 (3) 需求分析 (3) 概要设计 (3) 开发环境 (4) 系统分析设计..................................................................... 4 有关了解内存管理的相关理论 (4) 内存管理概念 (4) 内存管理的必要性 (4) 内存的物理组织 (4) 什么是虚拟内存 (5) 连续动态分区内存管理方式 (5) 单一连续分配(单个分区) (5) 固定分区存储管理 (5) 可变分区存储管理(动态分区) (5) 可重定位分区存储管理 (5) 问题描述和分析 (6) 程序流程图 (6) 数据结构体分析 (8) 主要程序代码分析 (9) 分析并实现四种内存分配算法 (11) 最先适应 算 (11) 下次适应分配算法 (13) 最优适应算法 (16) 最坏适应算法......................................................... (18) 回收内存算法 (20) 调试与操作说明 (22) 初始界 面 (22) 模拟内存分配 (23) 已分配分区说明表面 (24) 空闲区说明表界 面 (24) 回收内存界 面 (25) 重新申请内存界面..........................................................26.总结与体会. (28) 参考文献 (28) 引言 操作系统是最重要的系统软件,同时也是最活跃的学科之一。我们通过操作系统可以理解计算机系统的资源如何组织,操作系统如何有效地管理这些系统资源,用户如何通过操作系统与计算机系统打交道。 存储器是计算机系统的重要组成部分,近年来,存储器容量虽然一直在不断扩大,但仍不能满足现代软件发展的需要,因此,存储器仍然是一种宝贵而又紧俏的资源。如何对它加以有效的管理,不仅直接影响到存储器的利用率,而且还对系统性能有重大影响。而动态分区分配属于连续分配的一种方式,它至今仍在内存分配方式中占有一席之地。 课程设计目的和内容: 理解内存管理的相关理论,掌握连续动态分区内存管理的理论;通过对实际问题的编程实现,获得实际应用和编程能力。 编写程序实现连续动态分区内存管理方式,该程序管理一块虚拟内存,实现内存分配和回收功能。分析并实现四种内存分配算法,即最先适应算法,下次最先适应算法,最优适应算法,最坏适应算法。内存分配算法和回收算法的实现。 需求分析 动态分区分配是根据进程的实际需要,动态地为之分配内存空间。在实现动态分区分配时,将涉及到分区分配中所用的数据结构、分区分配算法和分区的分配和回收操作这样三个问题。常用的数据结构有动态分区表和动态分区链。在对数据结构有一定掌握程度的情况下设计合理的数据结构来描述存储空间,实现分区存储管理的内存分配功能,应该选择最合适的适应算法(首次适应算法,最佳适应算法,最后适应算法,最坏适应算法),在动态分区存储管理方式 matlab音频降噪课程设计报告 燕山大学 医学软件课程设计说明书 题目:基于MATLAB巴特沃斯滤波器的音频去噪的GUI设计 学院(系):电气工程学院 年级专业: 13级生物医学工程 2 班 学号: 130103040041 学生姓名:魏鑫 指导教师:许全盛 1 院(系):电气工程学院基层教学单位:生物医学工程系 学号130103040041 学生 姓名 魏鑫 专业(班 级) 13级生 物医学 工程2 班 设计 题目 基于MATLAB音频去噪的GUI设计设 计 技术参数通带截止频率fp=2700;阻带截止频率fs=3000;采样频率FS=48000; 通带衰减不大于1dB;阻带衰减不小于10dB; 设计要求1.实现用MATLAB导入音频; 2.对音频进行频谱分析; 3.设计滤波器去噪并对含噪信号进行滤 2 波并进行功率谱分析; 4.设计能实现上述功能的GUI; 工作量1.完成音频录入及频谱分析相关程序的编写与调试; 2.设计滤波器去噪; 3.用MATLAB软件做GUI界面的设计; 工作计划11.21-11.24 MATLAB软件中GUIDE 工具箱的使用 11.25-11.29 各处理算法模块的编程实现 11.30-12.1 整体程序联调 12.2 撰写课程设计说明书,答辩 参考资料 1. 陈怀琛吴大正 MATLAB及在电子信息课程中的应用[M] 北京电子工业出版社 2006. 章节2.4; 2. 陈亚勇 MATLAB信号处理详解[M] 北京:人民邮电出版社 2000. 第十 3 章; 3.张康刘雅基于Matlab的巴特沃斯 数字低通滤波器的设计[J] 计算机与现代化 2007年 12期 98-100页 指导 教师签字许全盛 基层教学单 位主任签字 彭勇 目录 一、设计目的意义 (1) 1.1绪论 (1) 1.2设计目的 (1) 1.3意义 (1) 二、设计内容 (2) 2.1 设计原理 (2) 2.2 设计内容 (2) 三、设计过程及结果分析 (3) 3.1 设计步骤 (3) 4 北华大学 《MATLAB仿真》课程设计 姓名: 班级学号: 实习日期: 辅导教师: 前言 科学技术的发展使的各种系统的建模与仿真变得日益复杂起来。如何快速有效的构建系统并进行系统仿真,已经成为各领域学者急需解决的核心问题。特别是近几十年来随着计算机技术的迅猛发展,数字仿真技术在各个领域都得到了广泛的应用与发展。而MATLAB作为当前国际控制界最流行的面向工程和科学计算的高级语言,能够设计出功能强大、界面优美、稳定可靠的高质量程序,而且编程效率和计算效率极高。MATLAB环境下的Simulink是当前众多仿真软件中功能最强大、最优秀、最容易使用的一个系统建模、仿真和分析的动态仿真环境集成工具箱,并且在各个领域都得到了广泛的应用。 本次课程设计主要是对磁盘驱动读取系统校正部分的设计,运用自动控制理论中的分析方法,利用MATLAB对未校正的系统进行时域和频域的分析,分析各项指标是否符合设计目标,若有不符合的,根据自动控制理论中的校正方法,对系统进行校正,直到校正后系统满足设计目标为止。我组课程设计题目磁盘驱动读取系统的开环传递函数为是设计一个校正装置,使校正后系统的动态过程超调量δ%≤7%,调节时间ts≤1s。 电锅炉的温度控制系统由于存在非线性、滞后性以及时变性等特点,常规的PID控制器很难达到较好的控制效果。考虑到模糊控制能对复杂的非线性、时变系统进行很好的控制, 但无法消除静态误差的特点, 本设计将模糊控制和常规的PI D控制相结合, 提出一种模糊自适应PID控制器的新方法。并对电锅炉温度控制系统进行了抗扰动的仿真试验, 结果表明, 和常规的PI D控制器及模糊PI D复合控制器相比,模糊自适应PI D控制改善了系统的动态性能和鲁棒性, 达到了较好的控制效果。 信息系统分析与设计课程设计报告 题目:人事管理系统 专业:信息管理与信息系统 班级:093221 学号:09322129 姓名:张楚玉 指导老师:黄国辉 2011年11月24日 摘要 随着信息技术的发展与提高,在社会中的各个领域中信息技术起了很大的作用。人们越来越离不开信息技术。人事管理系统能够通过利用信息技术方便各个企业或者机构管理人员的调动、人员档案的管理以及人员工薪的管理等,可以使企业或者机构更好的利用人力资源达成目标,为企业的决策提供帮助。 关键字:信息技术、数据、企业、人员 Abstract With the development of information technology and the improvement of society, in all fields of information technology plays a very important role. People more and more depend on the information technology. Personnel management system through the use of information technology to facilitate the enterprises or institutions management staff mobility, personnel file management and personnel salary management, can make the enterprise or institution to better use of human resources to achieve the goal, for the enterprise decision-making provide help. Keywords: information technology, data, business, personnel 南通大学计算机科学与技术学院操作系统课程设计报告 专业: 学生姓名: 学号: 时间: 操作系统模拟算法课程设计报告 设计要求 将本学期三次的实验集成实现: A.处理机管理; B.存储器管理; C.虚拟存储器的缺页调度。 设计流程图 主流程图 开始的图形界面 处理机管理存储器管理缺页调度 先来先服务时 间 片 轮 转 首 次 适 应 法 最 佳 适 应 法 先 进 先 出 L R U 算 法 A.处理机调度 1)先来先服务FCFS N Y 先来先服务算法流程 开始 初始化进程控制块,让进程控制块按进程到达先后顺序让进程排队 调度数组中首个进程,并让数组中的下一位移到首位 计算并打印进程的完成时刻、周转时间、带权周转时间 其中:周转时间 = 完成时间 - 到达时间 带权周转时间=周转时间/服务时间 更改计时器的当前时间,即下一刻进程的开始时间 当前时间=前一进程的完成时间+其服务时间 数组为空 结束 2)时间片轮转法 开始 输入进程总数 指针所指的进程是 否结束 输入各进程信息 输出为就绪状态的进程的信息 更改正在运行的进程的已运行时间 跳过已结束的程序 结束 N 指向下一个进程 Y 如果存在下一个进程的话 Y N 输出此时为就绪状态的进程的信息 时间片轮转算法流程图 B.存储器管理(可变式分区管理) 1)首次适应法 分配流程图 申请xkb内存 由链头找到第一个空闲区 分区大小≥xkb? 大于 分区大小=分区大小-xkb,修改下一个空闲区的后向指针内容为(后向指针)+xkb;修改上一个空闲区的前向指针为(前向指针)+xkb 将该空闲区从链中摘除:修改下一个空闲区的后向地址=该空闲区后向地址,修改上一个空闲区的前向指针为该空闲区的前向指针 等于 小于延链查找下 一个空闲区 到链尾 了? 作业等待 返回是 否 登记已分配表 返回分配给进程的内存首地址 开始MATLAB课设报告
课程设计之matlab仿真报告
产品系统设计课程设计大纲(完稿)
matlab课程设计报告书
基于Simulink仿真双闭环系统综合课程设计报告书
操作系统课程设计
matlab音频降噪课程设计报告
MATLAB仿真课程设计报告
信息系统与设计课程设计报告
操作系统(一个小型操作系统的设计与实现)课程设计
相关主题
文本预览