
第二部分 古典控制理论基础习题详解
一 概述
2-1-1 试比较开环控制系统和闭环控制系统的优缺点。 【解】:
2-1-2 试列举几个日常生活中的开环和闭环控制系统的例子,并说明其工作原理。 【解】: 开环控制——半自动、全自动洗衣机的洗衣过程。 工作原理:被控制量为衣服的干净度。洗衣人先观察衣服的脏污程度,根据自己的经验,设定洗涤、漂洗时间,洗衣机按照设定程序完成洗涤漂洗任务。系统输出量(即衣服的干净度)的信息没有通过任何装置反馈到输入端,对系统的控制不起作用,因此为开环控制。
闭环控制——卫生间蓄水箱的蓄水量控制系统和空调、冰箱的温度控制系统。 工作原理:以卫生间蓄水箱蓄水量控制为例,系统的被控制量(输出量)为蓄水箱水位(反应蓄水量)。水位由浮子测量,并通过杠杆作用于供水阀门(即反馈至输入端),控制供水量,形成闭环控制。当水位达到蓄水量上限高度时,阀门全关(按要求事先设计好杠杆比例),系统处于平衡状态。一旦用水,水位降低,浮子随之下沉,通过杠杆打开供水阀门,下沉越深,阀门开度越大,供水量越大,直到水位升至蓄水量上限高度,阀门全关,系统再次处于平衡状态。
【解】:
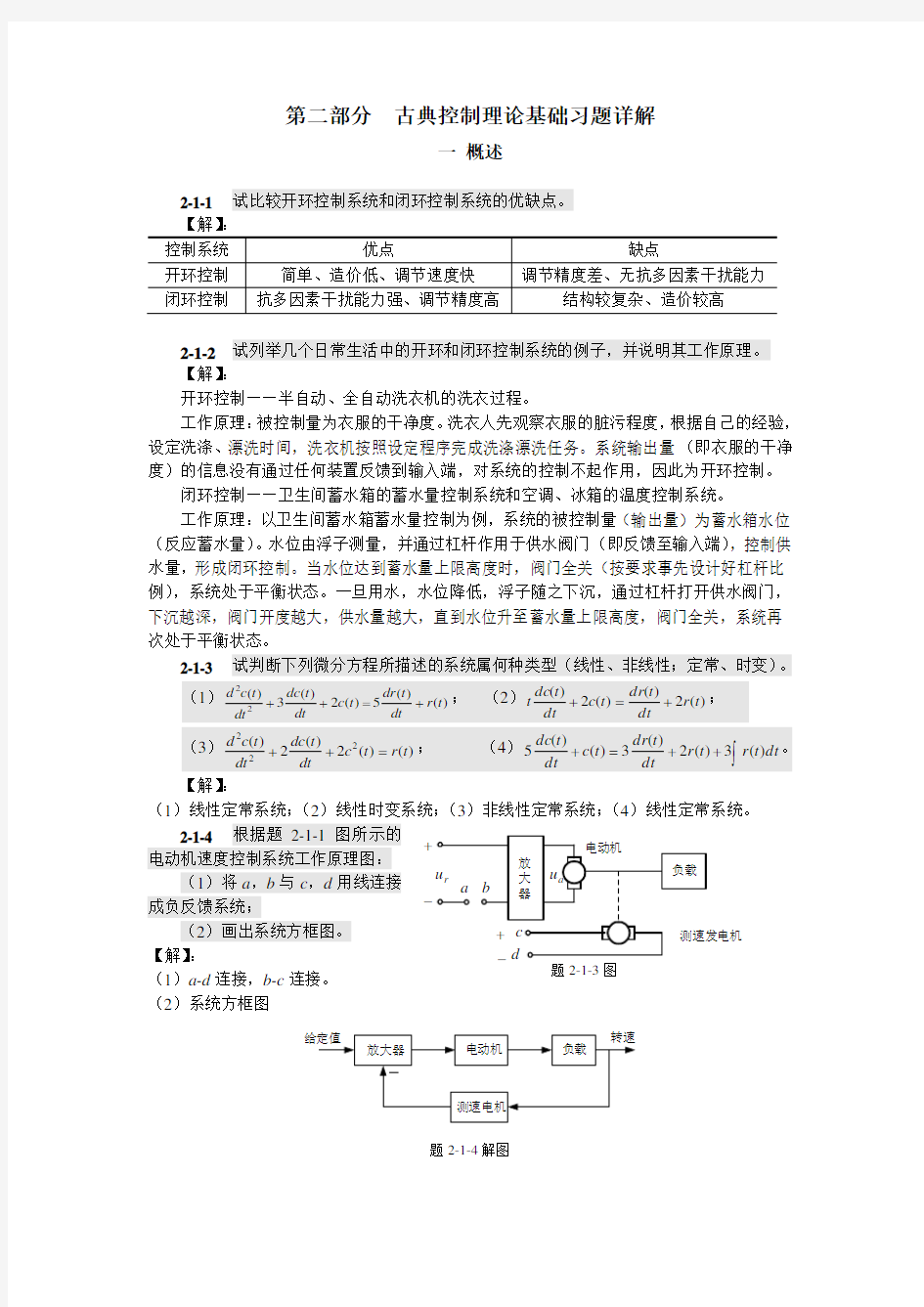
(1)线性定常系统;(2)线性时变系统;(3)非线性定常系统;(4)线性定常系统。 2-1-4 根据题2-1-1图所示的电动机速度控制系统工作原理图: (1)将a ,b 与
c ,
d 用线连接成负反馈系统;
(2)画出系统方框图。 【解】:
(1)a -d 连接,b -c 连接。 (2)系统方框图
给题2-1-4解图
到给定值时,电动机的输入电压又会回到零,系统重新达到平衡状态。反之易然。
水位
题2-1-5解图
2-1-6 仓库大门自动控制系统如图所示,试分析系统的工作原理,绘制系统的方框图,指出各实际元件的功能及输入、输出量。
【解】:
当给定电位器和测量电位器输出相等时,放大器无输出,门的位置不变。假设门的原始平衡位置在关状态,门要打开时,“关门”开关打开,“开门”开关闭合。给定电位器与测量电位器输出不相等,其电信号经放大器比较放大,再经伺服电机和绞盘带动门改变位置,直到门完全打开,其测量电位器输出与给定电位器输出相等,放大器无输出,门的位置停止改变,系统处于新的平衡状态。系统方框图如解图所示。 元件功能
电位器组——将给定“开”、“关”信号和门的位置信号变成电信号。为给定、测量元件。
放大器、伺服电机——将给定信号和测量信号进行比较、放大。为比较、放大元件。 绞盘——改变门的位置。为执行元件。 门——被控对象。 系统的输入量为“开”、“关”信号;输出量为门的位置。
二 控制系统的数学模型
2-2-1 试建立下图所示各系统的微分方程并说明这些微分方程之间有什么特点,其中电压)(t u r 和位移)(t x r 为输入量;电压)(t u c 和位移)(t x c 为输出量;1,k k 和2k 为弹簧弹性系数;f 为阻尼系数。
【解】:)(a
方法一:设回路电流为i ,根据克希霍夫定律,可写出下列方程组:
????
?
=+=?
i R u u dt i C u c
c r 1
削去中间变量,整理得:
dt
du RC
u dt
du RC
r c c =+
方法二:
r c c r c u RC u u
RC RCs RCs Cs
R R s U s U =+?
+=
+
=
1
1)
()(
)(b 由于无质量,各受力点任何时刻均满足∑=0F ,则有:
c c r kx x x f =-)( r c c x
k f x x
k
f =+?
)
(c ()r r c c r c u u C R u u C R R Cs
R R Cs R Cs
R R Cs
R s U s U +=++?
+++=
+
++=
221212212)(1
1
11)
()(
)(d 设阻尼器输入位移为a x ,根据牛顿运动定律,可写出该系统运动方程
r r c c a
a c a r c r x x
k f x x
f k k k k x
f x x k x x k x x k +=++?
??
?=--=- 2
2
121221)()()(
结论:)(a 、)(b 互为相似系统,)(c 、)(d 互为相似系统。四个系统均为一阶系统。
【解】:可利用复阻抗的概念及其分压定理直接求传递函数。
(a) 9
(b)
1
)(1
)(1)1//
(1//
1)
()(2122112
212122112
2121221111+++++++=
+
+-
=s C R C R C R s
C C R R s C R C R s C C R R s
C R s
C R s
C R s U s U r c
(c)
2
1212
12212)()//(1)//(1
)
()(R R s L C R R LCs
R Ls
R Ls R Cs
R Ls R Cs s U s U r c +++++=
++
+=
(d)
s
C R R s
C R s
C R R
s
C R s
C R s
C R s C s U s U r c 121121211//)1(//)1(1//)1(1
)
()(+
?
+
+
+
+++
=
1
)2(1
2212
212
12
212
+++++=
s RC RC s
C C R s RC s C C R
2-2-3 工业上常用孔板和差压变送器测量流体的流量。通过孔板的流量Q 与孔板前后化,试将流量方程线性化。 【解】:取静态工作点),(00Q P ,将函数在静态工作点附近展开成泰勒级数,并近似取前两项
)
(2)
(2
1)(00
000
0000
P P P k Q Q P P P k Q P P Q Q Q P P -=
-?
-+
=-'
+==
设
21P k R
=
(R 为流动阻力),并简化增量方程为
P R
Q 1=
2-2-4 系统的微分方程组为:
【解】:对微分方程组进行零初始条件下的Laplace 变换得:
)
()()()()()()()()()()()(322323211211s X k s C s sC T s C k s X s X s X s X k s sX T s C s R s X =+-=-=-=
绘制方框图
题2-2-4图
传递函数为
)
1()()
()(2321123122
122
1++++++=
k k k k s T k k T T s T T k k s R s C
【解】:利用理想运算放大器及其复阻抗的特性求解。
)
1(
)
()(1//)(1)()
(21122
11
21122s
C R s C R C C R R s U s U s C R s U s
C R s U a r c r c +
++
-=?
-
=+
1
1)
()()(1//
)()
(21
21
2+?
-
=?
-
=Cs R R R s U s U R s U Cs
R s U b r c r c
2-2-6
。
(a) (b)
(c
)
(d)
题2-2-6图
【解】:)
(a
(1)
(2)
(3)
(4)
(b)
(1)
(2)
(3)
(4) (c)
(1)
(2)
(3)
(4)
(d)
(1)
(2)
(3)
(4)
2-2-7 【解】:(a ) (1)该图有一个
回路
)
1(301)
1(301+-
=??
+=
s s s s l
(2)该图有三条前向通路
)
1(301
101)
1(104321+=
+=
=
+=
s s P s P s
P s s P
所有前向通路均与1l 回路相接触,故14321=?=?=?=?。
(3)系统的传递函数为
)
(
b )
(a 题2-2-7图
30
4111)(1)
()()(2
44332211-++=
?+?+?+??
=
=
s s
s P P P P s R s C s G
(b )
(1)为简化计算,先求局部传递函数)
()()(s E s C s G =
'。该局部没有回路,即1=?,
有四条前向通路:43444321332221111G G P G G G G P P G G P =?-=?-=?=?
所以 1)(43214321--+='G G G G G G G G s G
(2)
4
3214321432143211)
(1)()
()()(G G G G G G G G G G G G G G G G s G s G s R s C s G -+--+=
'+'=
=
2-2-8 设线性系统结构图如题2-2-8图
所示,试
(1) 画出系统的信号流图; (2)
【解】:
(1) 系统信号流图如图:
(2) ① 求传递函数)
()(1s R s C 。令0)(2=s R 。
有三个回路:)
1()
2)(1(2
1321
+-=
++=+-
=s s K l s s K l s l
1l 和3l 互不接触:)
2)(1(31++=
s s s K
l l
因此
)
2)(1()
1()2)(1(2
11+++++
++-
++
=?s s s K s s K
s s K s
有三条前向通路:1
)
2)(1()1(11
12211
=?++-
=++=?+=
s s s K P s s K s P
1)
2)(1(33=?++-
=s s K
P
K
s s s K s s
s R s C 334)
1()
()(2
3
2
1+++-+=
② 求传递函数
)
()(2s R s C 。令0)(1=s R 。
1
-
求解过程同①,?不变。11
2
11)
1(2211
=?+=
++
=?+=
s K P s s s K P
K
s s s s s
K s R s C 334)
33()
()(2
3
2
2+++++=
2-2-9 系统的动态结构图如图所示,试求
3
212
3
213213
21)
1(1)1()
()(k k k s Ts
k k k Ts s k k k Ts s k k k s R s C ++=++
+=
3
212
4332132143
321)()
1(11
)
1()()
()(k k k s Ts
s k k s G k k k Ts s k k k Ts k k Ts s k k k s G s N s C c c ++-=
++
+-+=
(2)根据题意2
1443321)(0
)(0)
()(k k s k s G s k k s G k k k s N s C c c =
?
=-?
=
2-2-10
题2-2-10图
【解】:根据梅森增益公式得:
1)1()1(1)
1(1111
1
)
1()
()(2
323
2
3
2
3
=++++++++=
+
+++
+
+++-
++
+=
s
s Ks s K s s Ks s K s
s
K s
s K s s K s s s s s
s K s R s C ττττττ
)
()()()()()(10211s X K t X s N K s sC s R s X =+-=τ
)
(1)()()()()(34523s X Ts
s X s X s N s X s X =
--=
)
(1
1)()()()(545s X s s C s C s X s X +=
-=
(2
题2-2-11解图
(3)求传递函数
)
()(s R s C ,令0)(=s N
1
)12()
1(1
111)1()
()(02
00
++++=++
++
+
+=s K T Ts
K s Ts s K s Ts
s Ts K s R s C ττ
(4)求传递函数
)
()(s N s C ,令0)(=s R
1
)12(1
)
1(1
111)1(1
)1()
()(02
10010++++-=++
++
+
+-=s K T Ts
K K s Ts s K s Ts
s Ts K K s N s C ττ
2-2-12
题2-2-12图
【解】:(1)求
)
()(,
)
()(s R s E s R s C 。令0)(0
)(==s F s N
6
323213
211)()(G G G G G G G G G s R s C ++=
6
323216
3211)
()(G G G G G G G G G s R s E +++=
(2)求
)
()(,
)
()(s N s E s N s C 。令0)(0
)(==s F s R
6
323213
21)()(G G G G G G G G s N s C ++=
6
323213
21)
()(G G G G G G G G s N s E ++-
=
(3)求
)
()(,
)
()(s F s E s F s C 。令0)(0
)(==s N s R
6
323214353211)()(G G G G G G G G G G G G s F s C +++=
6
323214353211)
()(G G G G G G G G G G G G s F s E +++-
=
三 时域分析法
2-3-1 若某系统,当零初始条件下的单位阶跃响应为t t e e t c --+-=21)(试求系统的传递函数和脉冲响应。
【解】 传递函数:
[][])
2)(1(2
4)
()()(1)()(,
)2)(1(2
4)()(22
++++=
==
=++++=
=s s s s
s R s c s G s
t r L s R s s s s s
t c L s c
单位脉冲响应: )
0(2)()]([)(21≥+-==---t e e t s G L t g t
t δ
2-3-2 二阶系统单位阶跃响应曲线如图所示,试确定系统开环传递函数。设系统为单
位负反馈式。
【解】
23
.351
.01456
.02
.0%100%2
12
≈?
=-==?=?=--
n n
p t e
ωωξπ
ξσξ
ξπ
系统的开环传递函数为:
)
2.32(1246)
2()(2
+=
+=
s s s s s G n n
k ξω
ω
2-2-3 已知系统的结构图如图所示
(1)当0=d k 时,求系统的阻尼比ξ,无阻尼振荡频率n ω和单位斜坡输入时的稳态误差;
(2)确定d k 以使707
.0=ξ,并求此时当输入为单位斜坡函数时系统的稳态误差。
【解】(1)0=d k 时
)
2(8)(+=
s s s G K
??
??
?==??????==?42
2
22
28
2ξωξωωn n n )
121(
4)
2(8)(+=+=
s s s s s G K 系统为Ⅰ型
25
.014==
?=V
ss V K e K
(2)0≠d k 时
?????=
==???
?
??=+==?++=
++
+=4183.222707.0)
41(228)]41(2[8)2(81)
2(8
)(2d n d n n d d K k k k s s s k s s s G ωξξωω
,
1)
125.0(2)
4(8)(=?
+=
+=
v s s s s s G K Ⅰ型系统,5
.01,
2==
?
=V
ss V
K e K
3-4 温,发现需30s 时间指出实际水温的95%的数值。试求:
(1)把容器的水温加热到100°C ,温度计的温度指示误差ss e ;
(2)给容器加热,使水温依6°C/min 的速度线性变化时,温度计的稳态指示误差ss e 。 【解】: 根据题意得 10%)5(303=?±=?==T T t s 单位反馈系统的开环传函数为
1.0,11.01)(1
1)(==?
==
?
+=
K v s
Ts
s G Ts s G K B
题2-3-2图
.1
(1) 阶跃输入时系统稳态无差。
(2) 斜坡输入时,输入信号速率为)C/(1.0min)C/(60s r ?=?=
C
11
.01.00?===
K r e ss
(注:也可以用给定输入下输出响应的终值与给定值之间的偏差计算。) 2-3-5
征方程根的区域:
(1)s rad n /2,1707.0≥<≤ωξ
(2)s rad s rad n /4/2,5.00≤≤≤<ωξ (3)s rad n /2,707.05.0≤≤<ωξ
【解】:根据阻尼比和无阻尼自然振荡角频率与特征根在平面上位置的关系可知 (1)2
,
4502,1≥?≤
。满足要求的闭环特征根的区域如解图(1)所示。
(2)4
2,
90602,1≤≤?<≤?s β。满足要求的闭环特征根的区域如解图(2)所示。
(3)2
,
60452,1≤?<≤?s β。满足要求的闭环特征根的区域如解图(3)所示。
(2)峰值时间p t 、调节时间s t 和超调量%σ。
【解】:(1)?
?
?==?
????
?==5.02
2
24
2ξωωξωn n n 典型二阶系统欠阻尼情况,可以利用公式直接计算。 单位阶跃响应为:
)
0()603sin(3321)
5.0cos
5.012sin(5
.011)
1sin(11)(1
22
2
2
≥?+-
=+---
=+---
=----t t e
t e
t e
t h t
t
n t
n βωξξ
ξω
单位斜坡响应为:
)
0()
1203sin(
335.0)
21sin(12)(2
2
≥?++-=+--+
-
=--t t e
t t e
t t c t
n n t
n
n βωξξ
ωωξ
ξω
(2)系统性能指标为:
s
t n
p 81.112
=-=
ωξπ
%)
2(44
%)
5(33
=?=≈
=?=≈
s
t s
t n
s n
s ξω
ξω
%
3.16%100%2
1=?=--
ξ
π
ξσe
2-3-7 系统方框图如题2-3-7图所示,若系统的
%,15%=σs t p 8.0=。试求:
(1)1K 、2K 值;
(2))(1)(t t r =时:调节时间s t 、上升时间r t 。 【解】:(1)利用方框图等效变换化系统为单位反馈的典型结构形式后得开环传递函数为
)]
1([)
1(1)1()(211
211
k k s s k s
k s s k s s k s G k ++=
++
+=
?????+==?
2
11
212k k k n n ξωω
根据题意:
??
?==?
??
?==?
???
????=-==?=--
18
.021588
.4517.08.01%15%100%21212
k k s
t e n n
p ωξωξπσξξπ
(2)
s
t s
t s
t n r n s n s 54.01%)
2(69.14
%)
5(27.13
2
=--=
=?=≈
=?=≈ξ
ωβπξ
ωξω
2-3-8 已知闭环系统特征方程式如下,试用劳斯判据判定系统的稳定性及根的分布情况。
(1)010092023=+++s s s (2)020092023=+++s s s
(3)03482234=++++s s s s (4)0154844122345=+++++s s s s s 【解】:
(1)劳斯表为
100
4100
20910
123s
s s s
劳斯表第一列符号没有改变,且特征方程各项系数均大于0,因此系统稳定,该系统三个特征根均位于s 的左半平面。
(2)劳斯表为
200
1200
20910
123s
s s s -
劳斯表第一列符号改变二次,该系统特征方程二个根位于右半平面,一个根位于左半平面,系统不稳定。
(3) 劳斯表为
3
33
6423
810
1234s
s s s s
劳斯表第一列符号没有改变,且特征方程各项系数均大于0,因此系统稳定,该系统四个特征根均位于s 的左半平面。
(4) 劳斯表为
1
06.41
4018611259401
481254410
123
45s
s s s s s
劳斯表第一列符号没有改变,且特征方程各项系数均大于0,因此系统稳定,该系统五个特征根均位于s 的左半平面。
2-3-9 已知闭环系统特征方程式如下
(1)021520234=++++K s s s s (2)050)1(23=++++Ks s K s 试确定参数K 的取值范围确保闭环系统稳定。 【解】:(1)根据特征方程列写出劳斯表为:
K
s
K s K
s s K
s 0
12349.142029
.14220151-
系统稳定的充分必要条件为
49
.1009.142020<
??
?
?
?>-
>K K K
(2)由三阶系统稳定的充分必要条件得
59
.650
)1(0>?
??
?>?+>K K K K
2-3-10 具有速度反馈的电动控制系统如题2-3-10图所示,试确定系统稳定的i K 的取值范围。
【解】:系统的特征方程为
)
10)(6.5(1000)
10)(6.5(1001=+++
+++
s s s s s s s K i
01000)56100(6.152
3=++++s K s
s i
系统稳定的条件是
081
.01000
)56100(6.150
56100>?
??
?>+>+i
i i K K K 。
【解】:系统的开环传递函数为
1
1005,
1)110012.0(1100512.010011
2.0100
201)(+=
=?
+++=
++
+?
?
=t K t t t k K K K v s K s K K
s K s s
K s G
K
K 为开环增益。在系统稳定的前提条件下有
,
1
1005,
=+=∞=a t v p
k K K k k
(1)0
11)(1)(=+=
?
=p
ss k
e t t r ;
(2)K
K k e t t t r t v
ss 51
1001)
(1)
(+=
=
?
?= ;
(3)
∞
=?
?=
ss e t t t r )
(12
1)(2
2-3-12 已知系统的结构图如图所示。
(1)确定K 和t K 满足闭环系统稳定的条件;
(2)求当)(1)(t t t r =和0)(=t n 时,系统的稳态误差ss e ; (3)求当0)(=t r 和)(1)(t t n =时,系统的稳态误差ss e 。
【
解】:(1)系统的
特征方程为
)02.0(250)
25()102.0()
25(12
3
2
2
=++++?=+++
++
K s K K s
s
s s s K s s s KK t t
系统稳定时
??
?>>?
??
?
??>+>+>02.00
)02.0(250)02.0(0
t
t t K K K
K K K K K (2)方法一
系统开环传递函数为
,t
K
t
t
t t
K K K
v s KK
s
KK
s s K s s KK
s s s K s G 1,
1)
1251(
)102.0(1
)
25(1)25()
102.0()(2
2
=
=?++
+=++
++=
K
K 为开环增益。 Ⅰ型系统,0,
1,
==
=∞=a t
K
v p
k K K
k k ,根据题意,
0)(1)(2
==
s N s
s R ,
t
ssr ss K e e =+=0
方法二
K
s K K s
s KK s s
s s s s K s s s KK s s s KK s R s E t t t t ++++++=
+++
++
++
=)02.0(25)
25()
25()102.0()
25(1)
25(1)
()(2
3
2
2
2
2
t
t t s s ssr ss K s
K s K K s
s KK s s
s s
s sE e e =++++++===→→2
2
3
2
1
)02.0(25)
25(lim )(lim
(3)方法一
)(1)(t t n =。由102.01+=s s G )
(得,1,0='='K ν
11
1lim
)(lim
1
-=?-=?'
-=→+'→s
s s N K s
e s s ssn ν 方法二
K
s K K s
s K
s s s K s s s KK s s K
s N s E t t ++++-
=+++
++
+-
=)02.0(25)
25()102.0()
25(1)25()
()(2
3
2
2
2
11]
)02.0(25[lim )()
()(lim 2
3
-=++++-
=??
==→→s
K
s K K s
s
K
s s N s N s E s e e
s s ssn ss
2
1)()(s
s N s R =
=
)]
()1()1()()1([
)()()()()
())(1()1()()1()(2
2
2
2
s N K
s s T s T s T s K s R k
s s T s K s R s C s R s E s N K s Ts
s T s T s K s R k s Ts
s K s C d d d d +++++
+++-=-=+++++
+++=
ττ
K K K s sE e d
s ss --=
=→τ1)(lim 0
K
K e K K e d
ss d
ss -=
?
=-=
?=10
10
ττ
2-3-14 具有扰动输入的控制系统如图所示,求:当)(1)()()(21t t n t n t r ===时系统的稳态误差。 【解】:系统特征方程为
20
1.11.00
)
1)(11.0(20
12
3
+++?
=+++
s s s s s s
20
1.01.1?<
该系统不稳定,所以稳态误差没有意义。
【解】:系统稳定的充分必要条件是K 1,K 2>0。
(1)s
s N s
s s R 1)(64)(2
-
=+=
题2-3-14图
方法一 开环传递函数为
,
1)
125.0(4
)
4()(2
121=?
+=
+=
v s s K K s s K K s G K Ⅰ型系统
4
2
1K K K V =
1
1
1
112
11lim
)(lim
,0)()(1)(24K K s
s N K s
e K K v K s G t t n K K e v s v s ssn ssr ='
='
-=='='?=-==
'
→+'→
)
24(122
1K K K e e e ssn ssr ss +=
+=
方法二
)()4()()4()4()(2
12
2
1s N K K s s K s R K K s s s s s E ?++-
?+++=
)24(1
)1()4()64()4()4(lim )(lim 22121222100K K K s K K s s K s s K K s s s s s s E s e s s ss +=??
????-++-+?+++?=?=→→
(2)由1
1K e ssn
=
可知,若要减小ssn e 则应增大K 1。
(3)扰动输入时,系统型别为1,所以阶跃扰动时静态无差。
2
124K K e e ssr ss =
=∴
2-3-16
量%
3.16%
≤σ; 若误差)()()(t c t r t e -=,当输入)(1)10()(t t t r ?+=时其稳态误差1.0≤ss e 。
试求:
(1)K 值;
(2)单位阶跃响应的调节时间s t ;
(3)当)(1)10()(2t t t t r ?++=时的稳态误差ss e 。 【解】:(1)
1)
11.0(1.0)(=?
+=
v s s K s G k
010==∞
=a v p k K k k
100
1
.0101110≥?
≤=++=
K K
k k
e v
p
ssr
又100
5
.010%3.16%102)
10()(2≤???
?≥≤???
?
??≤==?+=
K K
s s K s G n n n ξωσξωω
∴100
=K
时符合题意
高中数学必修1课后习题答案 第一章 集合与函数概念 1.1集合 1.1.1集合的含义与表示 练习(第5页) 1.用符号“∈”或“?”填空: (1)设A 为所有亚洲国家组成的集合,则:中国_______A ,美国_______A , 印度_______A ,英国_______A ; (2)若2 {|}A x x x ==,则1-_______A ; (3)若2{|60}B x x x =+-=,则3_______B ; (4)若{|110}C x N x =∈≤≤,则8_______C ,9.1_______C . 1.(1)中国∈A ,美国?A ,印度∈A ,英国?A ; 中国和印度是属于亚洲的国家,美国在北美洲,英国在欧洲. (2)1-?A 2 {|}{0,1}A x x x ===. (3)3?B 2{|60}{3,2}B x x x =+-==-. (4)8∈C ,9.1?C 9.1N ?. 2.试选择适当的方法表示下列集合: (1)由方程2 90x -=的所有实数根组成的集合; (2)由小于8的所有素数组成的集合; (3)一次函数3y x =+与26y x =-+的图象的交点组成的集合; (4)不等式453x -<的解集. 2.解:(1)因为方程2 90x -=的实数根为123,3x x =-=, 所以由方程2 90x -=的所有实数根组成的集合为{3,3}-; (2)因为小于8的素数为2,3,5,7, 所以由小于8的所有素数组成的集合为{2,3,5,7}; (3)由326y x y x =+??=-+?,得14x y =??=? , 即一次函数3y x =+与26y x =-+的图象的交点为(1,4),
1.2根据题1.2图所示的电动机速度控制系统工作原理 (1)将a,b 与c,d 用线连接成负反馈系统; ( 2)画出系统 框图。 c d + - 发电机 解: (1) a 接d,b 接c. (2) 系 统 框 图 如下 1.3题1.3图所示为液位自动控制系统原理示意图。在任何情况下,希望页面高度c 维持不变,说明系统工作原理并画出系统框图。
解: 工作原理:当打开用水开关时,液面下降,浮子下降,从而通过电位器分压,使得电动机两端出现正向电压,电动机正转带动减速器旋转,开大控制阀,使得进水量增加,液面上升。同理,当液面上升时,浮子上升,通过电位器,使得电动机两端出现负向电压,从而带动减速器反向转动控制阀,减小进水量,从而达到稳定液面的目的。 系统框图如下: 2.1试求下列函数的拉式变换,设t<0时,x(t)=0: (1) x(t)=2+3t+4t 2 解: X(S)= s 2 +23s +38 s
(2) x(t)=5sin2t-2cos2t 解:X(S)=5 422+S -242+S S =4 2102+-S S (3) x(t)=1-e t T 1- 解:X(S)=S 1- T S 11+ = S 1-1 +ST T = ) 1(1 +ST S (4) x(t)=e t 4.0-cos12t 解:X(S)=2 212 )4.0(4 .0+++S S 2.2试求下列象函数X(S)的拉式反变换x(t): (1) X(S)= ) 2)(1(++s s s 解:= )(S X )2)(1(++s s s =1 122+-+S S t t e e t x ---=∴22)( (2) X(S)=) 1(1 522 2++-s s s s 解:=)(S X ) 1(1522 2++-s s s s =15 12+-+S S S
第一章 习题答案 习 题 1-1 根据题1-1图所示的电动机速度控制系统工作原理图 (1) 将a ,b 与c ,d 用线连接成负反馈状态; (2) 画出系统方框图。 1-2 题1-2图是仓库大门自动控制系统原理示意图。试说明系统自动控制大门开闭的工作原理,并画出系统方框图。 题1-2图 仓库大门自动开闭控制系统 1-3 题1-3图为工业炉温自动控制系统的工作原理图。分析系统的工作原理,指出 被控对象、被控量和给定量,画出系统方框图。 题1-3图 炉温自动控制系统原理图 1-4 题1-4图是控制导弹发射架方位的电位器式随动系统原理图。图中电位器1P 、2 P
并联后跨接到同一电源0 E 的两端,其滑臂分别与输入轴和输出轴相联结,组成方位角的给定元件和测量反馈元件。输入轴由手轮操纵;输出轴则由直流电动机经减速后带动,电动机采用电枢控制的方式工作。 试分析系统的工作原理,指出系统的被控对象、被控量和给定量,画出系统的方框图。 题1-4图导弹发射架方位角控制系统原理图 1-5 采用离心调速器的蒸汽 机转速控制系统如题1-5图所示。 其工作原理是:当蒸汽机带动负载 转动的同时,通过圆锥齿轮带动一 对飞锤作水平旋转。飞锤通过铰链 可带动套筒上下滑动,套筒装有平 衡弹簧,套筒上下滑动时可拨动杠 杆,杠杆另一端通过连杆调节供汽 阀门的开度。在蒸汽机正常运行 时,飞锤旋转所产生的离心力与弹簧的反弹力相平衡,套筒保持某个高度,使阀门处于一个平衡位置。如果由于负载增大使蒸汽机转速 ω下降,则飞锤因离心力减小而使套筒向下滑动,并通过杠杆增大供汽阀门的开度,从而使蒸汽机的转速回升。同理,如果由于负载减小使蒸汽机的转速 ω增加,则飞锤因离心力增加而使套筒上滑,并通过杠杆减小供汽阀门的开度,迫使蒸汽机转速回落。这样,离心调速器就能自动地抵制负载变化对转速的影响,使蒸汽机的转速 ω保持在某个期望值附近。 指出系统中的被控对象、被控量和给定量,画出系统的方框图。 1-6 摄像机角位置自动跟踪系统如题1-6图所示。当光点显示器对准某个方向时,摄像机会自动跟踪并对准这个方向。试分析系统的工作原理,指出被控对象、被控量及给定量,画出系统方框图。 题1-5图蒸汽机转速自动控制系统
Unit 1 Part Ⅱ Reading Task Vocabulary Ⅰ1. 1)respectable 2)agony 3)put down 4)sequence 5)hold back 6)distribute 7)off and on 8)vivid 9)associate 10)finally 11)turn in 12)tackle 2. 1)has been assigned to the newspaper’s Paris office. 2)was so extraordinary that I didn’t know whether to believe him or not. 3)a clear image of how she would look in twenty years’time. 4)gave the command the soldiers opened fire. 5)buying bikes we’ll keep turning them out. 3. 1)reputation; rigid; to inspire 2)and tedious; What’s more; out of date ideas 3)compose; career; avoid showing; hardly hold back Ⅱviolating Ⅲ;in upon Comprehensive Exercises ⅠCloze back; tedious; scanned; recall; vivid; off and on; turn out/in; career ; surprise; pulled; blowing; dressed; scene; extraordinary; image; turn; excitement ⅡTranslation As it was a formal dinner party, I wore formal dress, as Mother told me to. 2)His girlfriend advised him to get out of /get rid of his bad habits of smoking before it took hold. 3)Anticipating that the demand for electricity will be high during the next few months, they have decided to increase its production. 4)It is said that Bill has been fired for continually violating the company’s safety rules. /Bill is said to have been fired for continually violating the company’s safety rules. 5)It is reported that the government has taken proper measures to avoid the possibility of a severe water shortage. /The local government is reported to have taken proper measures to avoid the possibility of a severe water shortage. 2.Susan lost her legs because of/in a car accident. For a time, she didn’t know how to face up to the fact she would never (be able to) walk again. One day, while scanning (through) some magazines, a true story caught her eye/she was attracted by a true story. It gave a vivid description of how a disabled girl became a writer. Greatly inspired, Susan began to feel that she, too, would finally be able to lead a useful life. Unit 2 Part ⅡReading Task Vocabulary Ⅰ1. 1)absolutely 2)available 3)every now and then 4)are urging/urged 5)destination 6)mostly 7)hangs out 8)right away 9)reunion 10)or something 11)estimate 12)going ahead 2. 1)in the examination was still on his mind. 2)was completely choked up by the sight of his team losing in the final minutes of the game. 3)was so lost in study that she forgot to have dinner. 4)has come up and I am afraid I won’t be able to accomplish the project on time. 5)of equipping the new hospital was estimated at﹩2 million. 3. 1)were postponed; the awful; is estimated 2)reference; not available; am kind of 3)not much of a teacher; skips; go ahead Ⅱ;on Ⅲor less of/sort of 4. kind of/sort of 5. more or less 6. or something Comprehensive Exercises ⅠCloze up; awful; practically; neighborhood; correspondence; available; destination; reunion; Mostly; postponing; absolutely ; savings; embarrassment; phone; interrupted; touch; envelope; signed; message; needed ⅡHalf an hour had gone by, but the last bus hadn’t come yet. We had to walk home. 2)Mary looks as if she is very worried about the Chinese exam because she hasn’t learned the texts by
目录 1自动控制系统的基本概念 1.1内容提要 1.2习题与解答 2自动控制系统的数学模型 2.1内容提要 2.2习题与解答 3自动控制系统的时域分析 3.1内容提要 3.2习颗与他答 4根轨迹法 4.1内容提要 4.2习题与解答 5频率法 5.1内容提要 5.2习题与解答 6控制系统的校正及综合 6.1内容提要 6.2习题与解答 7非线性系统分析 7.1内容提要 7.2习题与解答 8线性离散系统的理论基础 8.1内容提要 8.2习题与解答 9状态空间法 9.1内容提要 9.2习题与解答 附录拉普拉斯变换 参考文献 1自动控制系统的基本概念 1. 1内容提要 基本术语:反馈量,扰动量,输人量,输出量,被控对象; 基本结构:开环,闭环,复合; 基本类型:线性和非线性,连续和离散,程序控制与随动; 基本要求:暂态,稳态,稳定性。 本章要解决的问题,是在自动控制系统的基本概念基础上,能够针对一个实际的控制系统,找出其被控对象、输人量、输出量,并分析其结构、类型和工作原理。
1.2习题与解答 题1-1图P1-1所示,为一直 流发电机电压白动控制系统示 意图。图中,1为发电机;2为减速器; 3为执行电机;4为比例放大器; 5为可调电位器。 (1)该系统有哪些环节组成, 各起什么作用” (2)绘出系统的框图,说明当 负载电流变化时,系统如何保持发 电机的电压恒定 (3)该系统是有差系统还是无 差系统。 (4)系统中有哪些可能的扰动, 答 (1)该系统由给定环节、比较环节、中间环节、执行结构、检测环节、 发电机等环节组成。 给定环节:电压源0U 。用来设定直流发电机电压的给定值。 比较环节:本系统所实现的被控量与给定量进行比较,是通过给定电 压与反馈电压反极性相接加到比例放大器上实现的 中间环节:比例放大器。它的作用是将偏差信号放大,使其足以带动 执行机构工作。该环节又称为放大环节 执行机构:该环节由执行电机、减速器和可调电位器构成。该环节的 作用是通过改变发电机励磁回路的电阻值,改变发电机的磁场,调节发 电机的输出电压 被控对象:发电机。其作用是供给负载恒定不变的电压. 检测环节跨接在发电机电枢两端、且与电压源0U 反极性相接到比 例放大器输人端的导线。它的作用是将系统的输出量直接反馈到系统的 输人端。 (2)系统结构框图如图1-5所示。当负载电流变化如增大时,发电 机电压下降,电压偏差增大,偏差电压经过运算放大器放大后,控制可逆 伺服电动机,带动可调电阻器的滑动端使励磁电流增大,使发电机的电压 增大直至恢复到给定电压的数值上,实现电压的恒定控制。 图P1-7电压自动控制系统示意图
《自动控制原理》习题参考答案 第1章 1.7.2基础部分 1.答:开环控制如:台灯灯光调节系统。 其工作原理为:输入信号为加在台灯灯泡两端的电压,输出信号为灯泡的亮度,被控对象为灯泡。当输入信号增加时,输出信号(灯泡的亮度)增加,反之亦然。 闭环控制如:水塔水位自动控制系统。 其工作原理为:输入信号为电机两端电压,输出信号为水塔水位,被控对象为电机调节装置。当水塔水位下降时,通过检测装置检测到水位下降,将此信号反馈至电机,电机为使水塔水位维持在某一固定位置增大电机两端的电压,通过调节装置调节使水塔水位升高。反之亦然。 2.答:自动控制理论发展大致经历了几个阶段: 第一阶段:本世纪40~60年代,称为“经典控制理论”时期。 第二阶段:本世纪60~70年代,称为“现代控制理论”时期。 第三阶段:本世纪70年代末至今,控制理论向“大系统理论”和“智能控制”方向发展。 3.答:开环控制:控制器与被空对象之间只有正向作用而没有反馈控制作用,即系统的输 出量与对控制量没有影响。 闭环控制:指控制装置与被空对象之间既有正向作用,又有反向联系控制的过程。 开环控制与闭环控制的优缺点比较: 对开环控制系统来说,由于被控制量和控制量之间没有任何联系,所以对干扰造成的误差系统不具备修正的能力。 对闭环控制系统来说,由于采用了负反馈,固而被控制量对于外部和内部的干扰都不甚敏感,因此,有不能采用不太精密和成本低廉的元件构成控制质量较高的系统。 4.答:10 线性定常系统;(2)非线性定常系统; (3)非线性时变系统;(4)非线时变系统; 1.7.3 提高部分 1.答:1)方框图: 2)工作原理:假定水箱在水位为给定值c(该给定值与电位器给定电信ur对应),此时浮子处于平衡位置,电动机无控制作用,水箱处于给定水位高度,水的流入量与流出量保持不变。当c增大时,由于进水量一时没变浮子上升,导致c升高,给电信计作用后,使电信计给电动机两端电压减小,电动机带动减齿轮,使控制阀开度减小,使进水量减小,待浮
第 一 章 1-1 图1-2是液位自动控制系统原理示意图。在任意情况下,希望液面高度c 维持不变,试说明系统工作原理并画出系统方块图。 图1-2 液位自动控制系统 解:被控对象:水箱;被控量:水箱的实际水位;给定量电位器设定水位r u (表征液 位的希望值r c );比较元件:电位器;执行元件:电动机;控制任务:保持水箱液位高度 不变。 工作原理:当电位电刷位于中点(对应 r u )时,电动机静止不动,控制阀门有一定的 开度,流入水量与流出水量相等,从而使液面保持给定高度r c ,一旦流入水量或流出水量 发生变化时,液面高度就会偏离给定高度 r c 。 当液面升高时,浮子也相应升高,通过杠杆作用,使电位器电刷由中点位置下移,从而给电动机提供一定的控制电压,驱动电动机,通过减速器带动进水阀门向减小开度的方向转动,从而减少流入的水量,使液面逐渐降低,浮子位置也相应下降,直到电位器电刷回到中点位置,电动机的控制电压为零,系统重新处于平衡状态,液面恢复给定高度 r c 。 反之,若液面降低,则通过自动控制作用,增大进水阀门开度,加大流入水量,使液面升高到给定高度 r c 。 系统方块图如图所示:
1-10 下列各式是描述系统的微分方程,其中c(t)为输出量,r (t)为输入量,试判断哪些是线性定常或时变系统,哪些是非线性系统 (1) 222 )()(5)(dt t r d t t r t c ++=; (2))()(8) (6)(3)(2 233t r t c dt t dc dt t c d dt t c d =+++; (3) dt t dr t r t c dt t dc t ) (3)()()(+=+; (4)5cos )()(+=t t r t c ω; (5)?∞-++=t d r dt t dr t r t c τ τ)(5)(6)(3)(; (6))()(2 t r t c =; (7)???? ?≥<=.6),(6,0)(t t r t t c 解:(1)因为c(t)的表达式中包含变量的二次项2 ()r t ,所以该系统为非线性系统。 (2)因为该微分方程不含变量及其导数的高次幂或乘积项,且各项系数均为常数,所以该系统为线性定常系统。 (3)该微分方程不含变量及其导数的高次幂或乘积项,所以该系统为线性系统,但第一项 () dc t t dt 的系数为t ,是随时间变化的变量,因此该系统为线性时变系统。 (4)因为c(t)的表达式中r(t)的系数为非线性函数cos t ω,所以该系统为非线性系统。 (5)因为该微分方程不含变量及其导数的高次幂或乘积项,且各项系数均为常数,所以该系统为线性定常系统。 (6)因为c(t)的表达式中包含变量的二次项2()r t ,表示二次曲线关系,所以该系统为非
一、填空题 1 闭环控制系统又称为反馈控制系统。 2 一线性系统,当输入就是单位脉冲函数时,其输出象函数与 传递函数 相同。 3一阶系统当输入为单位斜坡函数时,其响应的稳态误差恒为 时间常数T 。 4 控制系统线性化过程中,线性化的精度与系统变量的 偏移程度 有关。 5 对于最小相位系统一般只要知道系统的 开环幅频特性 就可以判断其稳定性。 6 一般讲系统的位置误差指输入就是 阶跃信号 所引起的输出位置上的误差。 7 超前校正就是由于正相移的作用,使截止频率附近的 相位 明显上升,从而具有较大的 稳定裕度。 8 二阶系统当共轭复数极点位于 +-45度 线上时,对应的阻尼比为0、707。 9 PID 调节中的“P ”指的就是 比例 控制器。 10 若要求系统的快速性好,则闭环极点应距虚轴越_ 远 越好。 11 在水箱水温控制系统中,受控对象为_水箱 ,被控量为_水温 。 12 自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为_ 开环控制方式 ;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为_ 闭环控制方式 ;含有测速发电机的电动机速度控制系统,属于_ 开环控制方式 。 13 稳定就是对控制系统最基本的要求,若一个控制系统的响应曲线为衰减振荡,则该系统_ 稳定 _。判断一个闭环线性控制系统就是否稳定,在时域分析中采用_ 劳斯判据 _;在频域分析中采用_ 奈氏判据 _。 14、传递函数就是指在_ 零 _初始条件下、线性定常控制系统的_ 输入拉式变换 _与_ 输出拉式变换 _之比。 15 设系统的开环传递函数为2(1)(1) K s s Ts τ++,则其开环幅频特性为_ _,相频特性为 _-180-arctan(tw-Tw)/1+tTw _。 16 频域性能指标与时域性能指标有着对应关系,开环频域性能指标中的幅值穿越频率c ω对 应时域性能指标_ 调整时间t _,它们反映了系统动态过程的_快速性 _。 17 复合控制有两种基本形式:即按 输入 的前馈复合控制与按 扰动 的前馈复合控制。 18 信号流图由节点___与___支路_组成。 19 二阶衰减振荡系统的阻尼比ξ的范围为_(0,1)___。 20 两个传递函数分别为G 1(s)与G 2(s)的环节,以并联方式连接,其等效传递函数为()G s ,则G(s)为 G 1(s)+ G 2(s)(用G 1(s)与G 2(s) 表示)。 21 PI 控制器就是一种相位_比例积分___的校正装置。 22 最小相位系统就是指 S 右半平面不存在系统的开环零点与开环极点 。 23对于一个自动控制系统的性能要求可以概括为三个方面:快速性____、_稳定性___与准确性。 24如果根轨迹位于实轴上两个相邻的开环极点之间,则在这两个极点间必定存在_一个分离点 _。
综合教程1课后习题答案 -------第六、七、八单元Unit 6 Vocabulary Ⅰ 1. 1) Fertile 2) Reflected 3) Overseas 4) Slim 5) Split 6) Sustained 7) Glow 8) Thrust 9) Keen 10) Bud 11) Previous 12) Whichever 2. 1) The sickly smell of carpets and furniture in the bedroom disgusts me.
2) Mary stopped corresponding with Henry after the death of her mother. 3) A radio transmitter is best located at an isolated place far from cities. 4) I was so absorbed in the game on TV that I didn’t hear Martin come in. 5) The rough surface of the basketball helps players grip the ball. 3. 1) to broaden; make their way 2) disgusts; take a chance on 3) the grand; and overseas; reflected Ⅱ 1. 1) frightened 2) afraid/ frightened 2. 1) alike/similar 2) similar 3. 1) alive 2) living 4. 1) sleeping 2) asleep Ⅲ 1. 1) disappointed 2) disappointment 3) disappointing 4) disappoint 5) disappointingly 6) disappointing 2. 1) attractive 2) attract 3) attraction 4) attractively 5)
一、 习 题 及 解 答 第1章习题及解答 1-1 根据图1-15所示的电动机速度控制系统工作原理图,完成: (1) 将a ,b 与c ,d 用线连接成负反馈状态; (2) 画出系统方框图。 解 (1)负反馈连接方式为:,d a ?c b ?; (2)系统方框图如图解1-1 所示。 1-2 图1-16是仓库大门自动控制系统原理示意图。试说明系统自动控制大门开、闭的工作原理,并画出系统方框图。 图1-16 仓库大门自动开闭控制系统 解 当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,
偏差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起。与此同时,和大门连在一起的电刷也向上移动,直到桥式测量电路达到平衡,电动机停止转动,大门达到开启位置。反之,当合上关门开关时,电动机带动绞盘使大门关闭,从而可以实现大门远距离开闭自动控制。系统方框图如图解1-2所示。 1-3 图1-17为工业炉温自动控制系统的工作原理图。分析系统的工作原理,指出被控对象、被控量和给定量,画出系统方框图。 图1-17 炉温自动控制系统原理图 解 加热炉采用电加热方式运行,加热器所产生的热量与调压器电压c u 的平方成正比,c u 增高,炉温就上升,c u 的高低由调压器滑动触点的位置,该触点由可逆转的直流电动机驱动。炉子的实际温度用热电偶测量,输出电压f u 。f u 作为系统的反馈电压与给定电压r u 进行比较,得出所控制偏差电压,经电压放大器、功率放大器放大成后,作为 况下,炉温等于某个期望值e u a u 控制电动机的电枢电压。 在正常情T °C ,热电偶的输出电压f u 正好等于给定电压r u 。此时,0=?=f r e u u u 故01,==a u u ,可逆电动机不转动,调压器的滑动触点停留在某个合适的位置上,使c u 保持一定的数值。这时,炉子散失量正好等于从加热器吸的热取的热量,形成稳定的热平衡状态,温度保持恒定。 当炉膛温度T °C 由于某种原因突然下降(例如炉门打开造成的热量流失),则出现以
第一章绪论 1-1试比较开环控制系统和闭环控制系统的优缺点. 解答:1开环系统 (1)优点:结构简单,成本低,工作稳定。用于系统输入信号及扰动作 用能预先知道时,可得到满意的效果。 (2)缺点:不能自动调节被控量的偏差。因此系统元器件参数变化, 外来未知扰动存在时,控制精度差。 2 闭环系统 ⑴优点:不管由于干扰或由于系统本身结构参数变化所引起的被控量 偏离给定值,都会产生控制作用去清除此偏差,所以控制精度较高。 它是一种按偏差调节的控制系统。在实际中应用广泛。 ⑵缺点:主要缺点是被控量可能出现波动,严重时系统无法工作。 1-2 什么叫反馈?为什么闭环控制系统常采用负反馈?试举例说明之。 解答:将系统输出信号引回输入端并对系统产生控制作用的控制方式叫反馈。 闭环控制系统常采用负反馈。由1-1中的描述的闭环系统的优点所证 明。例如,一个温度控制系统通过热电阻(或热电偶)检测出当前炉 子的温度,再与温度值相比较,去控制加热系统,以达到设定值。 1-3 试判断下列微分方程所描述的系统属于何种类型(线性,非线性,定常,时变)? (1) (2) (3) (4) (5)
(6) (7) 解答:(1)线性定常(2)非线性定常(3)线性时变 (4)线性时变(5)非线性定常(6)非线性定常 (7)线性定常 1-4如图1-4是水位自动控制系统的示意图,图中Q1,Q2分别为进水流量和出水流量。控制的目的是保持水位为一定的高度。 试说明该系统的工作原理并画出其方框图。 题1-4图水位自动控制系统 解答: (1) 方框图如下: ⑵工作原理:系统的控制是保持水箱水位高度不变。水箱是被控对象,水箱的水位是被控量,出水流量Q2的大小对应的水位高度是给定量。当水箱水位高于给定水位,通过浮子连杆机构使阀门关小,进入流量减小,水位降低,当水箱水位低于给定水位时,通过浮子连杆机构使流入管道中的阀门开大,进入流量增加,水位升高到给定水位。 1-5图1-5是液位系统的控制任务是保持液位高度不变。水箱是被控对象,水箱液位是被控量,电位器设定电压时(表征液位的希望值Cr)是给定量。
. 第一章引论 1-1 试描述自动控制系统基本组成,并比较开环控制系统和闭环控制系统的特点。答: 自动控制系统一般都是反馈控制系统,主要由控制装置、被控部分、测量元件组成。控制装置是由具有一定职能的各种基本元件组成的,按其职能分,主要有给定元件、比较元件、校正元件和放大元件。如下图所示为自动控制系统的基本组成。 开环控制系统是指控制器与被控对象之间只有顺向作用,而没有反向联系的控制过程。此时,系统构成没有传感器对输出信号的检测部分。开环控制的特点是:输出不影响输入,结构简单,通常容易实现;系统的精度与组成的元器件精度密切相关;系统的稳定性不是主要问题;系统的控制精度取决于系统事先的调整精度,对于工作过程中受到的扰动或特性参数的变化无法自动补偿。 闭环控制的特点是:输出影响输入,即通过传感器检测输出信号,然后将此信号与输入信号比较,再将其偏差送入控制器,所以能削弱或抑制干扰;可由低精度元件组成高精度系统。 闭环系统与开环系统比较的关键,是在于其结构有无反馈环节。 < 1-2 请说明自动控制系统的基本性能要求。 答: 自动控制系统的基本要求概括来讲,就是要求系统具有稳定性、快速性和准确性。 稳定性是对系统的基本要求,不稳定的系统不能实现预定任务。稳定性通常由系统的结构决定与外界因素无关。对恒值系统,要求当系统受到扰动后,经过一定时间的调整能够回到原来的期望值(例如恒温控制系统)。对随动系统,被控制量始终跟踪参量的变化(例如炮轰飞机装置)。 快速性是对过渡过程的形式和快慢提出要求,因此快速性一般也称为动态特性。在系统稳定的前提下,希望过渡过程进行得越快越好,但如果要求过渡过程时间很短,可能使动态误差过大,合理的设计应该兼顾这两方面的要求。 准确性用稳态误差来衡量。在给定输入信号作用下,当系统达到稳态后,其实际输出与所期望的输出之差叫做给定稳态误差。显然,这种误差越小,表示系统的精度
《自动控制原理》习题解答西安建筑科技大学自动化教研室
第一章习题及答案 1-3图1-3 (a),(b)所示均为调速系统。 (1) 分别画出图1-24(a)、图(b)所示系统的方框图。给出图1-24(a) 所示系统正确的反馈连线方式。 (2) 指出在恒值输入条件下,图1-24(a),(b) 所示系统中哪个是有差系统,哪个是无差系统,说明其道理。 图1-3 调速系统工作原理图 解图1-3 (a)正确的反馈连接方式如图1-3 (a)中虚线所示。 (1) 系统方框图如图解1-10所示。 (2) 图1-3 (a) 所示的系统是有差系统,图1-3 (b) 所示的系统是无差系统。 图1-3 (a)中,当给定恒值电压信号,系统运行达到稳态时,电动机转速的恒定是以发电机提供恒定电压为条件,对应发电机激磁绕组中电流一定是恒定值。这意味着放大器前端电压是非零的常值。因此,常值偏差电压存在是系统稳定工作的前提,故系统有差。 图1-3 (b)中,给定恒定电压,电动机达到稳定转速时,对应发电机激磁绕组中的励磁电流恒定,这意味着执行电动机处于停转状态,放大器前端电压必然为0,故系统无差。 1-4图1-4 (a),(b)所示的系统均为电压调节系统。假设空载时两系统发电机端电压均为
110V,试问带上负载后,图1-4(a),(b)中哪个能保持110V不变,哪个电压会低于110V?为什么? 图1-4 电压调节系统工作原理图 解带上负载后,开始由于负载的影响,图1-4(a)与(b)系统的端电压都要下降,但图(a)中所示系统能恢复到110V,而图(b) 所示系统却不能。理由如下: 图(a)系统,当u低于给定电压时,其偏差电压经放大器K放大后,驱动电机D转动,经 I增大,发电机的输出电压会升高,从而使偏差电减速器带动电刷,使发电机F的激磁电流 j 压减小,直至偏差电压为零时,电机才停止转动。因此,图(a)系统能保持110V不变。 图(b)系统,当u低于给定电压时,其偏差电压经放大器K后,直接使发电机激磁电流增大,提高发电机的端电压,使发电机G 的端电压回升,偏差电压减小,但不可能等于零,因 i=0,发电机就不能工作。即图(b)所示系统的稳态电压会低于110V。为当偏差电压为0时, f 1-5图1-5是仓库大门自动控制系统原理示意图。试说明系统自动控制大门开、闭的工作原理,并画出系统方框图。 图1-5 仓库大门自动开闭控制系统
第2课《学会查“无字字典”》4、读课文,说说爸爸是怎样解释“骄阳似火”、“惊涛拍岸”的,并把有关的句子画下来。 爸爸在解释这两个词语时,采取的方法不是灌输,而是通过提问,以及在由此产生的对话中聪聪进行启发。解释“骄阳似火”,爸爸联系被烈日“晒蔫”的树叶引导聪聪获得真实的感受;解释“惊涛拍岸”,爸爸是在聪聪观察大海波涛的基础上,引导聪聪由眼前的情景去体会“惊涛拍岸”的意境。具体句子见文中。 第4课《做一片美的叶子》4、假如你就是大树上那片美丽的叶子,你会想些什么?你会对大树、对人们说些什么? 答:如果我是大树上那片美丽的叶子,我是大树的一部分,我要为大树而生,把阳光变成生命的乳汁奉献给大树。我会对大树说:“大树妈妈,没有您,我是无法生存的,我一定尽自己的力量,为您输送营养,让您变得更加茁壮、青翠。”我还要对人们说:“社会如同一棵大树,你们就是树上那一片平凡的叶子,你们也要为社会作贡献,让社会变得更加美丽。”练习一口语交际《小小读书交流会》 交流时请有条理地说说自己最近读过的书的书名、作者以及书的内容。 范例:我的读书交流会 我最近读了中国古典文学名著《三国演义》,作者是罗贯中,主要讲了汉朝末年,魏、蜀、吴三国争霸天下的故事,这本书可精彩啦!有过五关斩六将的关羽,有神机妙算的诸葛亮,有能在万军之中取敌人首级的赵云。。。。。。。一个个生动的故事,一个个鲜明的人物,读来令人爱不释手。 相信今天我的讲述,一定会引起你阅读《三国演义》的兴趣,那就拿起书来读一读,到时候,我们也可以来一个“品茶论英雄”嘛! 第5课《北大荒的秋天》4、说说下面的词各表示什么颜色。每读一个你联想到什么?你能再找几个这种类型的词吗? (1)银灰:像白银那样的灰色;血红:像鲜血那样的红色;橘黄:像橘子那样的黄色:金黄:像金子那样的黄色。(2)读后会依次联想到白银、血、橘子、黄金。(3)类似的词语还有:枣红、草绿、雪白、墨黑、杏黄、天蓝、苹果绿、鸡冠红等。 第6课《西湖》读句子,任选两个带点的词语说话。 1、平静的湖面,犹如一面硕大的银镜。 2、孤山东边的白堤和西南的苏堤,就像两条绿色的绸带,轻柔地漂浮在碧水之上。 3、明净的湖水晃动着绿岛和白云的倒影,仿佛仙境一般。 4、岸边的华灯倒映在湖中,宛如无数的银蛇在游动。 例子:犹如:南湖公园,犹如一颗明珠镶嵌在美丽的南端。 像:圆圆的月亮像硕大的银盘挂在空中。 仿佛:母亲河南北贯穿,蜿蜒曲折,仿佛一串银链。 宛如:万里长城宛如一条巨龙卧在山峦之间。 练习二口语交际当有人敲门的时候 当一个人在家时,必须通过门镜(猫眼)或询问,弄清敲门人身份,才决定是否开门。如果是亲朋好友,或非常熟悉的人,就要开门纳客,充满热情,礼貌待客。如果是陌生人,不要开门,但说话要得体:“对不起,我不认识你,你要找的人不再家,如果有急事,是否让我用电话联系你要找的人。”“请问,您找谁?您是哪一位?您与要找的人是什么关系?对不起,您要找的人不在家。” 第8课《蒲公英》4、假如你是太阳公公,会怎样劝告那两颗想落到沙漠里湖泊里的小种子? 答:我会劝告它们,做事不要被表面现象所迷惑,要实事求是,不要有不切实际的幻想。第9课《三袋麦子》4、小猪、小牛、小猴的做法你最赞成谁的?为什么?如果是你,会怎
第一章 1-1 图1-2是液位自动控制系统原理示意图。在任意情况下,希望液面高度c维持不变,试说明系统工作原理并画出系统方块图。 图1-2 液位自动控制系统 解:被控对象:水箱;被控量:水箱的实际水位;给定量电位器设定水位(表征液位的希望值);比较元件:电位器;执行元件:电动机;控制任务:保持水箱液位高度不变。 工作原理:当电位电刷位于中点(对应)时,电动机静止不动,控制阀门有一定的开度,流入水量与流出水量相等,从而使液面保持给定高度,一旦流入水量或流出水量发生变化时,液面高度就会偏离给定高度。 当液面升高时,浮子也相应升高,通过杠杆作用,使电位器电刷由中点位置下移,从而给电动机提供一定的控制电压,驱动电动机,通过减速器带动进水阀门向减小开度的方向转动,从而减少流入的水量,使液面逐渐降低,浮子位置也相应下降,直到电位器电刷回到中点位置,电动机的控制电压为零,系统重新处于平衡状态,液面恢复给定高度。 反之,若液面降低,则通过自动控制作用,增大进水阀门开度,加大流入水量,使液面升高到给定高度。 系统方块图如图所示: 1-10 下列各式是描述系统的微分方程,其中c(t)为输出量,r (t)为输入量,试判断哪些是线性定常或时变系统,哪些是非线性系统 (1); (2); (3); (4); (5); (6); (7) 解:(1)因为c(t)的表达式中包含变量的二次项,所以该系统为非线性系统。 (2)因为该微分方程不含变量及其导数的高次幂或乘积项,且各项系数均为常数,所以该系统为线性定常系统。 (3)该微分方程不含变量及其导数的高次幂或乘积项,所以该系统为线性系统,但第一项的系数为t,是随时间变化的变量,因此该系统为线性时变系统。 (4)因为c(t)的表达式中r(t)的系数为非线性函数,所以该系统为非线性系统。 (5)因为该微分方程不含变量及其导数的高次幂或乘积项,且各项系数均为常数,所以该系统为线性定常系统。 (6)因为c(t)的表达式中包含变量的二次项,表示二次曲线关系,所以该系统为非线性系统。 (7)因为c(t)的表达式可写为,其中,所以该系统可看作是线性时变系统。
第1章控制系统概述 【课后自测】 1-1 试列举几个日常生活中的开环控制与闭环控制系统,说明它们的工作原理并比较开环控制与闭环控制的优缺点。 解:开环控制——半自动、全自动洗衣机的洗衣过程。 工作原理:被控制量为衣服的干净度。洗衣人先观察衣服的脏污程度,根据自己的经验,设定洗涤、漂洗时间,洗衣机按照设定程序完成洗涤漂洗任务。系统输出量(即衣服的干净度)的信息没有通过任何装置反馈到输入端,对系统的控制不起作用,因此为开环控制。 闭环控制——卫生间蓄水箱的蓄水量控制系统与空调、冰箱的温度控制系统。 工作原理:以卫生间蓄水箱蓄水量控制为例,系统的被控制量(输出量)为蓄水箱水位(反应蓄水量)。水位由浮子测量,并通过杠杆作用于供水阀门(即反馈至输入端),控制供水量,形成闭环控制。当水位达到蓄水量上限高度时,阀门全关(按要求事先设计好杠杆比例),系统处于平衡状态。一旦用水,水位降低,浮子随之下沉,通过杠杆打开供水阀门,下沉越深,阀门开度越大,供水量越大,直到水位升至蓄水量上限高度,阀门全关,系统再次处于平衡状态。 1-2 自动控制系统通常有哪些环节组成?各个环节分别的作用就是什么? 解:自动控制系统包括被控对象、给定元件、检测反馈元件、比较元件、放大元件与执行元件。各个基本单元的功能如下: (1)被控对象—又称受控对象或对象,指在控制过程中受到操纵控制的机器设备或过程。 (2)给定元件—可以设置系统控制指令的装置,可用于给出与期望输出量相对应的系统输入量。 (3)检测反馈元件—测量被控量的实际值并将其转换为与输入信号同类的物理量,再反馈到系统输入端作比较,一般为各类传感器。 (4)比较元件—把测量元件检测的被控量实际值与给定元件给出的给定值进行比较,分析计算并产生反应两者差值的偏差信号。常用的比较元件有差动放大器、机械差动装置与电桥等。 (5)放大元件—当比较元件产生的偏差信号比较微弱不足以驱动执行元件动作时,可通过放大元件将微弱信号作线性放大。如电压偏差信号,可用电子管、晶体管、集成电路、晶闸管等组成的电压放大器与功率放大级加以放大。 (6)执行元件—用于驱动被控对象,达到改变被控量的目的。用来作为执行元件的有阀、电动机、液压马达等。 (7)校正元件:又称补偿元件,它就是结构或参数便于调整的元件,用串联或反馈的方式连接在系统中,以改善控制系统的动态性能与稳态性能。 1-3 试阐述对自动控制系统的基本要求。 解:自动控制系统的基本要求概括来讲,就就是要求系统具有稳定性、准确性与快
1.1解: (1)机器人踢足球:开环系统输入量:足球位置输出量:机器人的位置 (2)人的体温控制系统:闭环系统输入量:正常的体温输出量:经调节后的体温 (3)微波炉做饭:开环系统:输入量:设定的加热时间输出量:实际加热的时间 (4)空调制冷:闭环系统输入量:设定的温度输出量:实际的温度 1.2解: 开环系统: 优点:结构简单,成本低廉;增益较大;对输入信号的变化响应灵敏;只要被控对象稳定,系统就能稳定工作。 缺点:控制精度低,抗扰动能力弱 闭环控制优点:控制精度高,有效抑制了被反馈包围的前向通道的扰动对系统输出量的影响;利用负反馈减小系统误差,减小被控对象参数对输出量的影响。 缺点:结构复杂,降低了开环系统的增益,且需考虑稳定性问题。 1、3 解:自动控制系统分两种类型:开环控制系统与闭环控制系统。 开环控制系统的特点就是:控制器与被控对象之间只有顺向作用而无反向联系,系统的被控变量对控制作用没有任何影响。系统的控制精度完全取决于所用元器件的精度与特性调整的准确度。只要被控对象稳定,系统就能稳定地工作。 闭环控制系统的特点: (1)闭环控制系统就是利用负反馈的作用来减小系统误差的 (2)闭环控制系统能够有效地抑制被反馈通道保卫的前向通道中各种扰动对系统输出量的影响。 (3)闭环控制系统可以减小被控对象的参数变化对输出量的影响。 1.4解 输入量:给定毫伏信号 被控量:炉温 被控对象:加热器(电炉) 控制器:电压放大器与功率放大器 系统原理方块图如下所示: 工作原理:在正常情况下,炉温等于期望值时,热电偶的输出电压等于给定电压,此时偏差信
号为零,电动机不动,调压器的滑动触点停留在某个合适的位置上。此时,炉子散失的热量正好等于从加热器获取的热量,形成稳定的热平衡状态,温度保持恒定。 当炉温由于某种原因突然下降时,热电偶的输出电压下降,与给定电压比较后形成正偏差信号,该偏差信号经过电压放大器、功率放大器放大后,作为电动机的控制电压加到电动机上,电动机带动滑线变阻器的触头使输出电压升高,则炉温回升,直至达到期望值。当炉温高于期望值时,调节过程相反。 1.5 解 不正确。引入反馈后,形成闭环控制系统,输出信号被反馈到系统输入端,与参考输入比较后形成偏差信号,控制器再按照偏差信号的大小对被控对象进行控制。在这个过程中,由于控制系统的惯性,可能引起超调,造成系统的等幅振荡或增幅振荡,使系统变得不稳定。所以引入反馈之后回带来系统稳定性的问题。 1、6 解: 对自动控制系统的基本要求就是:稳定性、快速性与准确性。 增大系统增益使得闭环控制系统的调整时间减小,提高系统的快速性。 2、1 解 对质量m 的受力分析如下图所示: 由牛顿第二定律得: ()22 ()() dz t d y t kz t f m dt dt --= 同时()()()z t y t x t =- 综合上述两式得其微分方程为 2222 ()()() ()d z t dz t d x t m f kz t m dt dt dt ++=- 设输入量输出量及其各阶导数的初始值均为零,对上式进行拉氏变换得式 2 2 ()()()()ms Z s fsZ s kZ s ms X s ++=- 故其传递函数为2 2()()()Z s ms G s X s ms fs k ==-++ 2、2解 受力分析得: 对于M 有: Mgsin θ=ML 22dt d θ F=Mgcos θ 对于m 有: