
霍尔检测转子位置补偿方案
一、霍尔位置误差测试
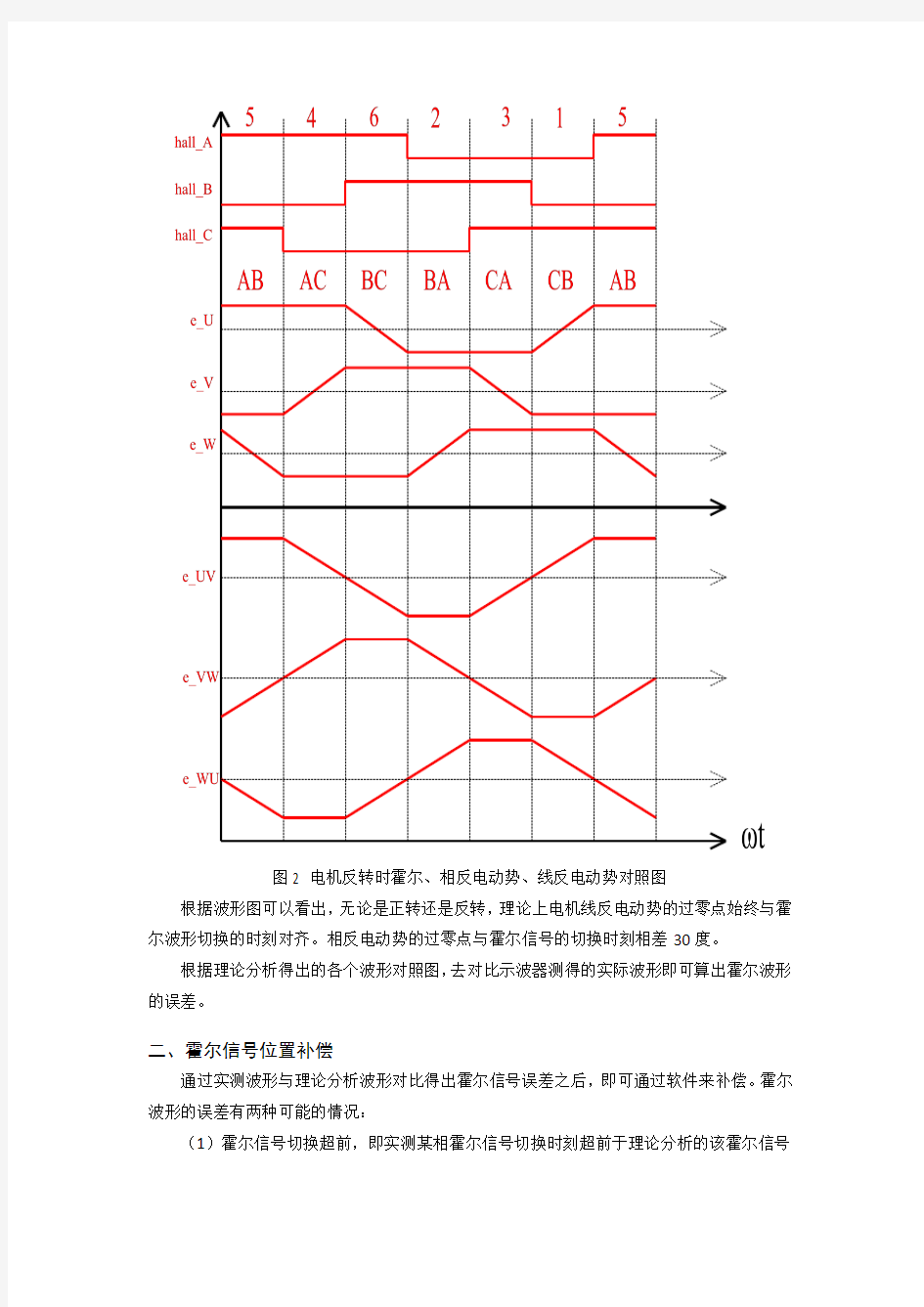
首先通过分析电机反电动势来确定霍尔信号的理论值。如下图所示为电机正转和反转时的霍尔信号、相反电动势、线反电动势波形对照图。线反电动势可由相反电动势相减得出。
图1 电机正转时霍尔、相反电动势、线反电动势对照图
根据波形图可以看出,无论是正转还是反转,理论上电机线反电动势的过零点始终与霍
尔波形切换的时刻对齐。相反电动势的过零点与霍尔信号的切换时刻相差30度。
根据理论分析得出的各个波形对照图,去对比示波器测得的实际波形即可算出霍尔波形
的误差。
二、霍尔信号位置补偿
通过实测波形与理论分析波形对比得出霍尔信号误差之后,即可通过软件来补偿。霍尔
波形的误差有两种可能的情况:
(1)霍尔信号切换超前,即实测某相霍尔信号切换时刻超前于理论分析的该霍尔信号
切换时刻。
(2)霍尔信号切换滞后,即实测某相霍尔信号切换时刻滞后于理论分析的该霍尔信号切换时刻。
对照实测波形发现确实同时存在波形切换时间超前和滞后的情况:
图3 实测霍尔信号超前与滞后的情况
这两种情况对应的软件补偿方式如下:
1. 霍尔信号切换超前补偿
霍尔信号切换超前,即霍尔信号提前切换。此时还未到最佳换向时机。所以需要在单片机检测到该相霍尔信号切换的时刻开始,往后延迟一段时间在进行换向,此时可以近似认为到达最佳换向时刻。那么重点就在于延迟的这一段时间为多久。首先通过实测波形与理论分析波形的对比可以测出霍尔波形的超前角度。然后结合当前换向时刻的转速,即可算出所需延迟时间。计算公式如下:
T表示一个电周期的时间,单位s;
n表示当前转速值,单位rad/min;
P表示电机极对数;t表示延迟时间,单位s;
表示霍尔信号超前角度。
上式中的当前转速实际为上一个电周期的平均转速,这里近似认为上一个电周期与当前电周期转速相同。
2. 霍尔信号切换滞后补偿
霍尔信号切换滞后,即霍尔信号延迟切换,此时最佳换向时机已经过去。所以我们需要在单片机检测到该霍尔信号切换前的就启动换向。这个比霍尔信号提前换向的时间同样可以
通过软件计算得到。计算方法与上文相同。但是这里计算出提前换向的时间还需要有一个开始计时的标志。在前文中霍尔信号超前的情况,是以该超前的霍尔信号来到时作为标志开始计时。现在为霍尔信号滞后的情况,即要在滞后的霍尔信号来之前就换向,所以无法使用该信号来作为计时的启动标志。这里我们可以使用上一个霍尔切换的时刻作为计时启动的标志。这样的话实际我们计时的时间就是T/6,即在上一次换向结束之后延时T/6,然后进行换向操作。这样的话,实际上这个延时的时间就只与当前转速有关,而与霍尔信号滞后的角度无关。所以在霍尔信号切换滞后的情况下,单片机不需要计算补偿时间,只需以上一霍尔信号切换为标志在延迟T/6的时间进行换向即可。
说明书摘要 本发明公开一种永磁同步电机转子初始位置的判断方法,步骤是:首先利用脉振高频电压注入法得到初次估计的转子位置,然后在初次估计的交轴上注入一个正方向扰动信号,再估计转子位置,根据估计得到的转速方向判断磁极极性,得到电机转子初始位置。此种方法可解决脉振高频电压信号注入法检测转子初始位置时磁极极性的收敛问题,无需在直轴上注入正负方向的脉冲电流,可以有效地实现转子初始位置估算。
摘要附图
1、一种永磁同步电机转子初始位置的判断方法,其特征在于包括如下步骤: (1)在??d q -估计同步旋转坐标系的?d 轴上注入高频电压信号?cos()d mh h u U t ω=,给定?q 轴电压?0q u =; (2)检测电机的两相电流,并经过Clarke 和Park 坐标系变换,得到??d q -估计同步旋转坐标系的?q 轴电流?q i ,并依照以下步骤估计转子的位置和转速:首先,将检测得到的?q 轴电流?q i 乘以调制信号cos()t h u t ω=;然后,对相乘后所得的信号低通滤波,得到?q 轴电流?q i 的幅值信号()f θ?;最后,对该幅值信号()f θ?进行PI 调节,得到估计转速?ω ,对估计转速?ω积分得到估计的转子位置; (3)重复步骤(2),直至估计的转子位置收敛为一恒定值,即为初次估计 的转子位置?first θ; (4)在??d q -估计同步旋转坐标系的?d 轴上注入高频电压信号?cos()d mh h u U t ω=,在?q 轴注入一个正方向扰动信号,重复步骤(2),直至电机转过一定角度γ,0γ>; (5)根据步骤(3)估计得到的转速方向判断磁极极性,当转速为正时,收 敛的磁极极性为N 极,转子初始位置??=initial first θθ;当转速为负时,收敛的磁极极性为S 极,转子初始位置??=initial first θθπ+。 2、如权利要求1所述的一种永磁同步电机转子初始位置的判断方法,其特 征在于:所述步骤(1)中,采用转子的估计位置?θ进行Park 逆变换,获得实际两相静止坐标系下电压的给定值?u α和?u β。
第4章 数控检测装置 4.1数控检测装置的概述 检测元件是闭环、半闭环伺服系统的重要组成部分。在闭环数控系统中,必须利用位置检测装置把机床运动部件的实际位移量随时检测出来,与给定的控制值(指令信号)进行比较,从而控制驱动元件准确运转,使工作台(或刀具)按规定的轨迹和坐标移动。因此,位置检测装置是数控机床的关键部件之一,它的精度直接影响数控机床的定位精度和加工精度。为此,对位置检测装置提出如下要求: (1)高可靠性和高抗干扰性; (2)满足精度和速度要求; (3)使用、维护方便,适合机床的运行环境; (4)成本低,寿命长。 对于不同类型的数控机床,因工作条件和检测要求不同,可以采用不同的检测方式。 ∑==n i i Z Z 1总 4.1.1对位置检测装置的要求 在数控机床中,数控装置是依靠指令值与位置检测装置的反馈值进行比较,以此来控制工作台运动的。位置检测装置是CNC 系统的重要组成部分。在闭环系统中,它的主要作用是检测位移量,并将检测的反馈信号和数控装置发出的指令信号相比较,若有偏差,经放大后控制执行部件,使其向着消除偏差的方向运动,直到偏差为零为止。为了提高数控机床的加工精度,必须提高测量元件和测量系统的精度,不同的数控机床对测量元件和测量系统的精度要求、允许的最高移动速度各不相同。现在检测元件与系统的最高水平是:被检测部件的最高移动速度至240m/min 时,其检测位移的分辨率(能检测的最小位移量)可达1μm ,相当于24m/min 时可达0.1μm 。最高分辨率可达0.01μm 。因此,研制和选用性能优越的检测装置是很重要的。 。 ‘ 数控机床对位置检测装置的要求如下: (1)受温度、湿度的影响小,工作可靠,能长期保持精度,抗干扰能力强; (2)在机床执行部件移动范围内,能满足精度和速度的要求; (3)使用维护方便,适应机床工作环境; (4)成本低; (5)易于实现高速的动态测量。 4.1.2检测装置的分类 按工作条件和测量要求的不同,测量方式亦有不同的划分方法,位置检测装置分类如表4—1所示。 表4—l 位置检测装置分类
采用增量式光电编码器作为位置检测元件的PMSM伺服电机,必须要在系统刚上电时就测得电机精确的初始位置。因为在永磁伺服驱动系统中,电机转子的位置检测与初始定位是系统构成与运行的基本条件,也是矢量控制解耦的必要条件。只有永磁同步电机的转子位置能够准确知道,才可以按照矢量控制的一系列方程,将永磁同步电机等效变换成dq坐标系上的等效模型,系统才能按照类似他励直流电机的控制方法对永磁同步电机进行控制,从而可以达到他励直流电机构成的伺服传动系统的性能指标要求。使用增量式光电编码器测量电机位置的伺服系统中, 系统上电后需要先检测出电机的初始位置。电机的初始位置不仅影响伺服系统的定位精度, 而且会对电机的快速启动性能造成一定的影响。 在系统刚刚上电,电机尚未运行时,系统开始测量转子的初始位置,此过程只需要电流环工作,根据伺服系统运行要求,在寻找初始位置的过程中,只允许有很微小的抖动,并且要求很快回归原位。 假设,采用H45-8-2500-WL型光电编码器,电机转动过程中,编码器输出的信号:A(/A)、B(/B)、Z(/Z)、U(/U)、V(/V)和W(/W),如图1(b)所示。其中A(/A)、B(/B)两组信号为相差相位角的同频率信号,分辨率为2500PPR,通过判断两组脉冲的相位可以判断出电机的旋转方向,这两组信号经4倍频之后,电机空间位置的分辨率变为10000PPR。脉冲Z (/Z)是同步信号,电机每旋转一周产生一个信号,其产生的位置固定,即电机转子转到该位置时发出信号(零位信号)。 如图1所示为伺服电机混合式光电编码器的码盘结构及输出信号波形。码盘的中间码道为刻有高密度的增量式透光缝隙(2000,2500,3000PPR等),两边分布两组互成的三个缝隙,受光元件(Photo-Diode Array)接收到发光元件(LED)通过缝隙的光线而产生互差的三相信号,经过放大整形后输出矩形波信号U(/U)、V(/V)和W(/W)。利用这些信号的组合状态来分别代表磁极在空间的不同位置。U(/U)、V(/V)和W(/W)三相脉冲信号每转的脉冲个数与电机的极对数相一致。根据U(/U)、V(/V)和W (/W)三相脉冲的高低电平关系可以判断电机磁极的当前位置。其过程是:电机启动前,通过U(/U)、V(/V)和W(/W)三相脉冲的状态估算出电机磁极位置,即当前的角度,一旦电机旋转起来,光电编码器的增量式部分可以精确地检测出位置值。这里,伺服电机极对数为4对极,则每相输出信号U(/U)、V(/V)和W(/W)的周期为空间,在每个周期中可以组合成6种状态,每种状态代表空间角度范围为。
基于高频电压注入法的永磁同步电机转子初始位置检测 Initial Rotor Position Inspection of PMSM Based on Rotating High Frequency Voltage Signal Injection 北京航空航天大学自动化科学与电气工程学院蔡名飞周元钧 摘要:为了解决新型无位置传感器永磁同步电机的起动问题,提出了一种在电机静止状态下检测转子位置的新方法。 该方法在算法上改进了传统的旋转高频电压注入法,使得可以更为快速、准确的检测出转子初始(均扫位置。并且针对传统旋转高频电压注人法无法检测出转子永磁体极性问题,在dq旋转坐标系下,通过分析永磁同步卜匕机d轴磁链和定子电流之间的关系,利用d轴电流的泰勒级数展开,提出J’根据定子铁芯非线性磁化特性获得判另}J N/S极极性信息的新方一案。最后,建立了系统仿真模型。仿真结果验证了这种方法的有效性和可行性。此方法同样适用于永磁同步电机在中、低速时的转子位置检测。 关键词:永磁同步电机转子初始位置旋转高频注人非线性磁化特性N/S极极性 1引言 永磁同步电机高精态、高动态性能的速度、位置控制,都需要准确的转子位置信息。如果位置检测误差较大,会导致电机不能正常起动、运行。传统方法是通过机械式传感器来测量转子的速度和位置。但机械式传感器减低了系统的可靠性,增加了系统的成本;同时传感器对环境有着严格的要求,电磁干扰、温度、湿度、振动对它的测量精度都有影响。特别针对某些航空伺服电机,长期工作在恶劣、复杂的环境中,所以研究无位置传感器不仅可 以减少航空电机成本,而且可以减少不必要的引线,将大大提高整个系统的可靠性〔‘]。 最简单的无位置传感器控制方法是文献「2]提出的基于对检测到的电机反电动势进行积分,这种方法虽然简单,但是在零速或低速阶段因为反电动太小,难以检测而失败。后来人们又提出了高频注人法,其主要思想是用电机固有的空间凸极或凸极效应可以实现对转子位置的检测,这种方法与转速没有直接关系,有效克服了反电动势法的 缺陷。文献〔3]提出通过处理电流高频响应,采取求导取极值计算电机的初始位置,但这种方法存在震荡现象,高频电流也会因滤波器移相导致检测误差,并且也没有给出电 机N/S极极性检测方法。文献【4]提出在电机中注人幅值相同、方向不同的系列脉冲,检测并比较相应电流的大小来估计转子的位置。这种方法可行但是对注入脉冲的电压幅 值和时间控制要求比较高,操作复杂,检测时间过长。文献[[5][6]通过注人高频信号引起PMSM的d,q轴磁链饱和程度差异实现初始位置检测,这种方法高频电流信号提取复 杂,容易带来计算误差,难以做到转子位置的实时检测跟踪。文献〔7l所使用的电机经过特殊设计,不具普遍性,仅适用于理论研究。 为了解决以上方法的存在的问题,本文提出了一种基于旋转高频电压注人法的永磁同步电机转子初始位置检测的新方法。在电机静止状态下,通过向电机定子三相绕组中注入高频电压信号,利用电机凸极效应,通过处理高频电流响应,得出转子的位置信号。为此,本文进行了仿真研究,实现了转子d轴位置和N/S极极性的快速、准确检测。 2高频激励下的永磁同步电机的数学模型