
电机设计步骤
选择电机类型:Adjust-Speed Synchronous Machine
转子采用内置式,控制类型:交流,Stacking Factor :0.95 。
定、转子材质:steel_1008,图2-3 所示的是steel_1008的B-H曲线图。从图2-3 中可以看出,硅钢片的饱和点在B=12T。因此电机的各部分磁密幅值因当小于12T,并且要适当留有一定裕量,以避免电机运行时发生磁饱和。
图2-3 steel_1008的B-H 曲线图
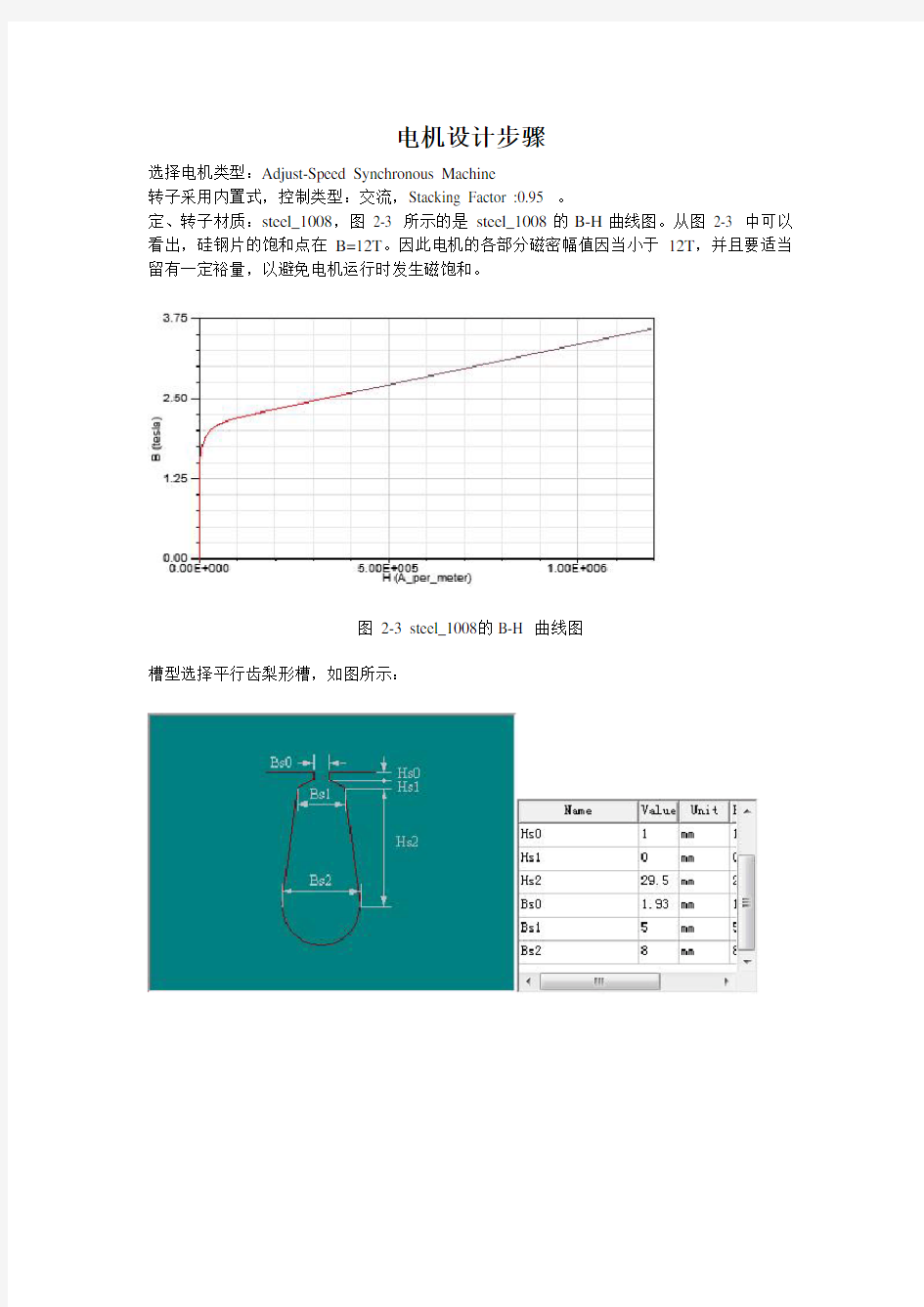
槽型选择平行齿梨形槽,如图所示:
绕组参数:线径:
0.91mm
极类型:
embrace :0.85
磁体类型:NdFe30. 参数 数值 单位
定子外径 270 mm
定子内经 162 mm
轴向长度 84 mm
气隙厚度 mm
转子外径 160.4 mm
转子内经 110 mm
永磁体厚度 7.5 mm
极弧系数
每槽导体数 8
定子槽数
绕组层数 2
槽数 48
极数 8
额定电压 200 V
额定功率 50 kW
额定转数 3600 rpm
线圈节距 5
以上参数设置好后,点击Analysis下的Solution Setup ,进行额定功率,额定电压,额定转速,工作温度等的设置。
然后点击Validate,再点击Analysis All,然后点击Analysis下的Setup1,右击,选择Create Maxwell Design ,点击OK,生成的Maxwell Design 如下图所示:
用Ansoft软件建立此永磁同步发电机二维有限元模型的具体过程如下:
(1)把永磁同步发电机的几何尺寸和基本参数输入RMxprt模块,软件对所输入项进行求解,自动生成二维有限元几何模型,如图1所示。
(2)将求解结果用export 2D project功能生成pjt文件,把该文件导入Maxwell 2D中,采用瞬态模块进行二维有限元分析。
(3)在生成的几何模型里定义电机的材料属性、边界条件和绕组的激励源,其中定义绕组激励源时采用外电路输入的方法。
(4)确定运动界限(band)、转子转速、有限元分析的时间步长以及有限元分析的网格划分情况等。
图永磁同步发电机的几何模型
第2章电磁场有限元分析简介 电磁场的边值问题实际上是求解给定边界条件下的麦克斯韦(Maxwell)方程组及由方程组深化出的其他偏微分方程问题。从求解问题的技术手段上来说,它可以分为解析求解和数值求解两大类。对于简单模型,有时可以得到方程的解析解。若模型复杂度增加,则往往很难获得模型的解析解。随着计算工具,特别是高速大容量电子计算机的发展,电磁场数值分析已深入到工业生产各个领域,解决问题的面越来越广,分析的问题也日趋复杂。电磁场数值分析是一门综合性的学科,涉及电磁场理论、数值分析、计算方法、计算机基础知识及高级语言等多个方面,但在计算上存在着共性。有限元法是一种常用的数值方法,并有相应的电磁软件问世,其中ANSOFT公司的Maxwell 3D/2D就是非常优秀的电磁分析软件。 本章将对电磁场的基本理论、电磁场有限元的求解及ANSOFT公司的Maxwell 3D/2D 作简单的介绍。至于完整的电磁理论描述,读者可以参考许多教科书。如果读者已熟悉电磁理论,完全可以略过本章,直接从第2章开始学习如何使用Maxwell电磁软件。 1.1电磁场基本理论 1.1.1麦克斯韦方程组 在19世纪中叶,麦克斯韦在总结前人工作的基础上,提出了适用于所有宏观电磁现象的数学模型,称之为麦克期韦方程组。它是电磁场理论的基础,也是工程电磁场数值分析的出发点。 麦克斯韦方程组包括微分和积分两种形式,在此仅给出它们的微分形式,通过它们可以导出能用有限元处理电磁问题的微分方程。 麦克斯韦方程组为 法拉第电磁感应定律 麦克斯韦-安培定律 高斯电通定律 高斯磁通定律 电荷守恒定律
式中,E为电场强度,V/m;D为电通量密度,C/m;H为磁场强度,A/m;B为磁通量密度,T;J为电流密度,A/㎡;P为电荷密度C/m3。 上面5个方程中包含两个旋度方程式(1.1)、式(1.2)和3个散度方程式(1.3)、式(1.4)和式(1.5)。
关于电机的毕业设计 【篇一:电机设计毕业论文】 目录 摘 要 ....................................................................................................... .. (1) abstract ............................................................................................. . (1) 第一章中小型电机设计概 述 ....................................................................................................... . (2) 1.1设计技术要 求 ....................................................................................................... .. (2) 1.2电机主要尺 寸 ....................................................................................................... .. (2) 1.3 绕组构及成原 理 ....................................................................................................... (4) 1.4主磁 路 ....................................................................................................... .. (4) 1.5电 抗 ....................................................................................................... (6) 1.6损耗与效 率 ....................................................................................................... (7) 1.7通风散 热 ....................................................................................................... . (7) 第二章三相异步电动机设计(y180l- 6/15kw) (9)
电机设计计算常用公式 1.输出功率2P 2P 2.外施相电压1U 1U 3.功电流KW I 1 13 210U m P I KW ??= 4.效率η' η' 5.功率因数?'cos ?'cos 6.极数p p 7.定子槽数1Q 1Q 转子槽数2Q 2Q 8.定子每极槽数 p Q Q P 1 1= 转子每极槽数 p Q Q P 2 2= 9.定转子冲片尺寸见图 10.极距P τ p D i P 1 ?= πτ 11.定子齿距1t 1 1 1Q D t i ?= π 12.转子齿距2t 2 2 2Q D t ?= π 13.节距y y 14.转子斜槽宽SK B SK B 15.每槽导体数1Z 1Z 16.每相串联导体数1φZ 1 11 11a m Z Q Z ??= φ 式中: 1a =
17.绕组线规(估算) ?η' ?'= ' ' ??'= ' ?'cos 11 11 11KW I I a I S N 式中:导线并绕根数·截面积 '?'11S N 查表 取' ?'11S N 定子电流初步估算值 ?η' ?'= 'cos I I KW 1 定子电流密度' ?1 '?1 18.槽满率 (1)槽面积 2 2221R h h b R S S S S π+ ??? ??-'+= (2)槽绝缘占面积 ?? ? ??+++' =122S S i i b R R h C S π (3)槽有效面积 i S e S S S -= (4)槽满率 e f S d Z N S 2 11??= 绝缘厚度i C i C 导体绝缘后外径d d 槽契厚度h h 19.铁心长l 铁心有效长 无径向通风道 g l l eff 2+= 净铁心长 无径向通风道 l K l Fe Fe ?= 铁心压装系数Fe K Fe K 20.绕组系数 111p d dp K K K ?= (1)分布系数 2sin 2sin 111 αα???? ???= q q K d 式中: p m Q q ?= 11 1
电机现代设计方法与优化作业 电气工程刘亚敏 1520310052 1、所用算法的寻优策略 本篇论文所采用的算法为蚁群算法,又称蚂蚁算法,其定义为:各个蚂蚁在没有事先告诉他们食物在什么地方的前提下开始寻找食物。当一只找到食物以后,它会向环境释放一种挥发性分泌物pheromone (信息素,该物质随着时间的推移会逐渐挥发消失,信息素浓度的大小表征路径的远近)来实现的,吸引其他的蚂蚁过来,这样越来越多的蚂蚁会找到食物。有些蚂蚁并没有像其它蚂蚁一样总重复同样的路,他们会另辟蹊径,如果另开辟的道路比原来的其他道路更短,那么,渐渐地,更多的蚂蚁被吸引到这条较短的路上来。最后,经过一段时间运行,可能会出现一条最短的路径被大多数蚂蚁重复着。 蚁群算法是一种新型的模拟进化算法,该算法通过模拟蚂蚁觅食的方式,使一定数量的蚂蚁在解空间内进行随机搜索,对路径上蚂蚁释放的信息素进行更新,按照转移概率决定前进的方向,最后收敛于全局最优解。蚁群算法具有较强的鲁棒性。相对于其它算法,蚁群算法对初始路线要求不高,即蚁群算法的求解结果不依赖子初始路线的选择,而且在搜索过程中不需要进行人工的调整。其次,蚁群算法的参数数目少,设置简单,易于蚁群算法应用到其它组合优化问题的求解。现在蚁群算法己经在电力网络优化、网络路中分配、函数优化和集成电路布线等领域得到应用。本文将蚁群算法进行了改进,将其用于永磁同步电机的优化设计中。
2、论文对算法的改进 算法与其它智能优化算法相比,存在搜索时间长的缺陷,该算法的复杂度可以反映这一点;而且该算法容易出现停滞现象,即搜索到一定程度后,所有个体发现的解完全一致,不能对解空间进行进一步的搜索,不利于发现更好的解。本文借鉴蚁群算法的进化思想,针对以上提及的两个问题,将算法的数学模型做了三方面的改进。 2.1转移规则的改进 对每只蚂蚁i ,定义其函数值为相应的目标函数值Zi ,并记蚂蚁i 与蚂蚁j 的目标函数值的差值为 蚂蚁j 到蚂蚁i 的转移概率为 式中:———蚂蚁j 邻域内的信息素数量; α和β———算法的权重因子,本文取α=β =1。 2.2信息素更新规则的改进 由于信息素强度Q 是表征蚂蚁所经轨迹数量的一个常数,它影响算法的全局收敛速度[ 5]。蚂蚁之间通过信息素进行交流,因此, 本文针对蚁群算法寻优过程易陷入局部最小的弊端,提出根据算法搜索的情况,动态修改需要增加的信息素的方法。即用时变函数Q(t)
1、 Assigned power rating 。标称功率。或额定功率。只该电机系统设计设计 时的理想功率也是在推荐工作情况下的最大功率。 POWER RATING 为功率。 2、Nominal voltage 。额定电压 (或工作电压,推荐电压。由于一般电机可以工作在不同电压下, 但电压直接和转速有关, 其他参数也相应变化, 所以该电压只是一种建议电压。其他参数也是在这种推荐的电压下给出的。 NOMINAL 名义上的。 3、 No load speed。空转速,或空载转速。单位是 RPM 。 revolutions per minute 此处的 R 不是 RATE 速度的意思,是 REVOLUTION 旋转的意思。空载转速由于没有反向力矩,所以输出功率和堵转情况不一样,该参数只是提供一个电机在规定电压下最大转速的作用。一般外面给出的 6000转啊, 12000转啊,多指这个参数。 4、 Stall torque 堵转转矩。这个是很多要带负载的电机的重要参数。即在电机受反向外力使其停止转动时的力矩。如果电机堵转现象经常出现, 则会损坏电机,或烧坏驱动芯片。所以大家选电机时,这是除转速外要考虑的参数。堵转时间一长,电机温度上升的很快,这个值也会下降的很厉害。 5、 Speed / torque gradient 速度 /转矩斜率。这个参数在一般的电机介绍中很 少出现。如果将转速为 Y 轴,力矩为 X 轴,一般,电机先是有一个和 X 轴平行的线,随后有点像 E 的负指数形式那样下降。即转速和力矩的乘积,随力矩的上升而下降。电机制造商都推荐电机在那条和 X 轴平行的线范围内工作。在这个范围内,电机的电流不至于导致电机过热和烧机。 6、 No load current。空载电流 (或空转电流。前面说过,电流和转矩密切相关。空载电流肯定存在, 其和电压的乘积形成的能量, 主要分为势能和热能消耗。热能就是电机线圈的发热,越好的电机,在空载时,该值越小,而势能指克服摩擦力, 和转子自身惯性的能量还有转子自身的转动势能。而一般转速一定时, 转子的惯性能量增加几乎没有, 而这个势能主要还是克服摩擦力的问题, 而最终以热能形式耗散, 所以空载电流越小, 电机的性能越好, 特别是加上减速箱的电机,空载电流越小,说明减速箱做的越好,当然,减速比越大,同样的设计方式下,阻力越大。
电机设计复习版(May you pass!!!) 第一章 2.电机设计的任务 ① 根据用户提出的产品规格(功率、电压、转速)和技术要求(效 率、参数、温升、机械可靠性);② 结合技术经济方面国家的方针政策和生产实际情况;③ 运用有关的理论和计算方法;④ 正确处理设计中遇到的多种矛盾; 设计出性能好,体积小、结构简单、运行可靠。制造和使用、维修方便的先进产品。 3.设计的依据 给定:(1)额定功率(2)额定电压(3)相数及相间连接法(4)额定频率(5)额定转速(6)额定功率因数 感应电机 1-5 同步电机1-6 直流电机1 2 5 4.电机设计过程 :① 准备阶段② 电磁设计③ 结构设计 第二章 5.主要尺寸:靠近气隙的电枢直径(D )与铁心有效长度(L ) 直流电机D 为转子外径.交流电机D 为转子内径 6. 电机的主要参数之间的关系式 计算功率: m ── 电枢绕组相数;E ── 电枢绕组相电势 I ── 电枢绕组相电流 310()P mEI KVA -'=?
7从确定主要尺寸关系式所得的结论 1、电机的主要尺寸决定于:计算功率P’与转速n之比或计算转矩T’决定 2.、A 、Bδ不变时,相同功率的电机,n↑,尺寸较小; 尺寸相同的电机,n↑,功率较大 3、转速一定,若直径不变而采用不同长度可得不同的功率的电机 4、α?p KNm、Kdp一般变化不大电机的主要尺寸在很大程度上和选择的A 、Bδ有关, A 、Bδ↑,电机的尺寸就愈小。 8.几何相似定律 在电流密度、磁感应强度、转速、频率保持不变时,对一系列功率递增,几何相似的电机,每单位功
序号 名称 公式/代号 单 位 备 注 1 负载电流 H H H H U P I ?ηcos ??= A 2 转子绕组线规 2 `2 d d mm ` 2 d 绝缘导线外径,2d 铜线直径 3 转子绕组截面 S 2= 2m m 4 转子绕组电密 2 22S I = ? 2mm A 2?间歇工作取10~14 5 转子线负荷 A= A/cm A=100~160(P88) 6 转子总导线数 I A D N 22π= 7 转子每槽线数 z N N S = 8 转子槽满率 ()()()2 12 2 `257.12222110?-+?--?? ?????-+?= -R h h R b d N f i S s Δ=槽绝缘厚度+间隙(cm) 一层槽绝缘的间隙为0.005cm s f 不大于0.76,自动绕线机不 大于0.65 9 转子绕组平均 22D K L l e += cm e K =0.95 当2D 小于4cm 时;e K =1当2D 小于4cm 时 10 转子绕组电阻 52 2 21035.5-?= S Nl r Ω 11 损耗比例系数 H H H P I r I a ηη-???? ? ?++=1034.04.23.222 仅用于初算内功率 12 内功率 ()[]H H H i a P P ηη--= 11 W 13 旋转电势 I P E i = V 14 电机常数 i H P Ln D C 22= 15 极距 2 2 D πτ= cm 16 极弧系数 a=极弧长度/极距 a=0.6~0.7 17 计算极距 ττa =0 cm 18 实槽节距 ε-=2Z y s Z 为单数时ε=0.5 Z 为偶数时ε=1 19 短矩系数 ?? ? ???=?180sin z y K s P 20 磁通 N n K E H p d 260= φ Wb 21 虚槽节距 ε?-= z K K y 21 Z 为单数时ε=0.5 Z 为偶数时ε=1 22 前节距 112-=y y
电机型号参数大全,再也不怕看不懂型号了电动机型号是便于使用、设计、制造等部门进行业务联系和简化技术文件中产品名称、规格、型式等叙述而引用的一种代号。下面为大家介绍电动机型号含义等信息。 一、电动机型号组成及含义? 由电机类型代号、电机特点代号、设计序号和励磁方式代号等四个小节顺序组成。 1、类型代号是表征电机的各种类型而采用的汉语拼音字母。 比如:异步电动机?Y?同步电动机?T 同步发电机?TF?直流电动机?Z 直流发电机?ZF 2、特点代号是表征电机的性能、结构或用途,也采用汉语拼音字母表示。 比如:隔爆型用B表示?YB轴流通风机上用?YT 电磁制动式?YEJ ?变频调速式?YVP 变极多速式?YD?起重机用?YZD等。 3、设计序号是指电机产品设计的顺序,用阿拉伯数字表示。对于第一次设计的产品不标注设计序号,对系列产品所派生的产品按设计的顺序标注。 比如:Y2?YB2 4、励磁方式代号分别用字母表示,S表示三次谐波,J表示晶闸管,X表示相复励磁。 如:Y2--?160?M1?–?8 Y:机型,表示异步电动机; 2:设计序号,“2”表示第一次基础上改进设计的产品; 160:中心高,是轴中心到机座平面高度; M1:机座长度规格,M是中型,其中脚注“2”是M型铁心的第二种规格,而“2”型比“1”型铁心长。 8:极数,“8”是指8极电动机。 如:Y?630—10?/1180 Y表示异步电动机; 630表示功率630KW;
10极、定子铁心外径1180MM。 二、规格代号主要用中心高、机座长度、铁心长度、极数来表示? ? 1、中心高指由电机轴心到机座底角面的高度;根据中心高的不同可以将电机分为大型、中型、小型和微型四种,其中中心高 H在45mm~71mm的属于微型电动机; H在80mm~315mm的属于小型电动机; H在355mm~630mm的属于中型电动机; H在630mm以上属于大型电动机。 2、机座长度用国际通用字母表示:S——短机座 M——中机座 L——长机座 3、铁心长度用阿拉伯数字1、2、3、 4、、、由长至短分别表示。 4、极数分2极、4极、6极、8极等。 三、特殊环境代号有如下规定: 特殊环境代号 “高”原用G 船(“海”)用H 户“外”用W 化工防“腐”用F 热带用T 湿热带用TH 干热带用TA 四、补充代号仅适用于有补充要求的电机? 举例说明:产品型号为YB2-132S-4?H的电动机各代号的含义为: Y:?产品类型代号,表示异步电动机; B:?产品特点代号,表示隔爆型; 2:?产品设计序号,表示第二次设计; 132:电机中心高,表示轴心到地面的距离为132毫米; S:?电机机座长度,表示为短机座;
一、电动机的选择 1、空气压缩机电动机的选择 1.1电动机的选择 (1)空压机选配电动机的容量可按下式计算 P=Q(Wi+Wa) ÷1000ηηi2 (kw) 式中P——空气压缩机电动机的轴功率,kw Q——空气压缩机排气量,m3/s η——空气压缩机效率,活塞式空压机一般取0.7~0.8(大型空压机取大值,小型空压机取小值),螺杆式空压机一般取0.5~0.6 ηi——传动效率,直接连接取ηi=1;三角带连接取ηi=0.92 Wi——等温压缩1m3空气所做的功,N·m/m3 Wa——等热压缩1m3空气所做的功,N·m/m3 Wi及Wa的数值见表 Wi及Wa的数值表(N·m/m3) 1.2空气压缩机年耗电量W可由下式计算 W= Q(Wi+Wa)T ÷1000ηηiηmηs2 (kw·h) 式中ηm——电动机效率,一般取0.9~0.92 ηs ——电网效率,一般取0.95 T ——空压机有效负荷年工作小时
2、通风设备电动机的选择 (1)通风设备拖动电动机的功率可按下式计算 P=KQH/1000ηηi (kw) 式中K——电动机功率备用系数,一般取1.1~1.2 Q——通风机工况点风量,m3/s H——通风机工况点风压轴流式通风机用静压,离心式通风机用全压,Pa η——通风机工况点效率,可由通风机性能曲线查得 ηi——传动效率,联轴器传动取0.98,三角带传动取0.92 (2)通风机年耗电量W可用下式计算 W=QHT/1000ηηiηmηs 式中ηm——电动机效率, ηs ——电网效率,一般取0.95 T ——通风机全年工作小时数 3、矿井主排水泵电动机的选择 (1)电动机的选择 排水设备拖动电动机的功率可按下式计算 P=KγQH/1000η (kw) 式中K——电动机功率备用系数,一般取1.1~1.5 γ——矿水相对密度,N/m3 Q ——水泵在工况点的流量,m3/s H ——水泵在工况点的扬程,m
玩具设计中马达的选用技巧和方法(总2页) -CAL-FENGHAI.-(YICAI)-Company One1 -CAL-本页仅作为文档封面,使用请直接删除
玩具设计中马达的选用技巧和方法 马达是玩具能够保持持续动力的主要动力源。设计人员在玩具生产中很少有机会设计一个马达,主要是选用。玩具马达的选用也有很多技巧和方法。 在玩具制造中常用的马达(电机),有万宝制(Mabuchi)、标准(Standard)等,这些马达生产厂家的产品都有马达性能的参照表,设计人员很少有机会设计一个马达,主要是选用,当然也可能因为某种原因而专门设计一个马达(很多马达厂的工程师都是从Mabuchi出来的,所以Mabuchi的标准基本可以用作玩具业的马达标准)。 用试验找出合适的转速比和扭矩 马达厂的标准是空载的转速,而转速比计算时,一般就是用空载转速的计算。行走类玩具的转速比在80~150之间,因玩具产品并非是一种精密的机械,所以可以通过调节齿轮的传动来得出实际需要的传动比。比如:齿轮传动中某一节的齿数比为20:8,实验发现转速太慢则可以试一下22:6,如果转速太快,又可以换18:10,这种办法非常方便。 马达产品都有一个最大载荷的数据,还有一个载荷与转速的关系。因为玩具产品一般不会很大而且是用电池驱动的较多,所以马达的载荷也不会很大。一般来说,载荷与扭矩越大,马达的体积也越大,所要的电池也越多,而且玩具的重量也越重,所以尽量选用合适的马达。一般保险起见,载荷与转速在曲线上升区的马达就管用。如果要节约成本,在找到一个大功率马达就可以起作用的情况下,换一个小功率的试一下。通过反复试验,找到一个功率较小又能满足要求的马达。 用收音机做干扰测试 马达的工作原理是不断地通过电刷来改变线圈中的电流,从而保证连续的转动。可以想像,马达里的磁铁越大,线圈越长,则扭矩会越大,而这种电流的改变会形成一个电磁波。电磁波的存在会对很多种家用电器造成干扰。如果一个小孩在等飞机的时候玩带有这种马达的玩具,还有可能影响飞机的起降。所以在实际工作中会增加一个抗干扰的垫圈(如DV WASHER , 0.5港币左右),但一般设计时都会在马达的两个电极上并联上一个陶瓷片电容或一个电阻(稳定电路的作用),一方面减少电刷与线圈转换时产生的电流影响,另一方面起稳定作用。实际工作中,用一个小收音机来做干扰测试器材,如不影响所有波段的电台就基本可以了。 马达转动轴一般是铁轴,而铁轴一般直接紧配一个6齿或8齿的0.5模数的齿轮(或一个小带轮或锅杆),当是齿轮或锅杆时,特别是锅杆时,会因为刚起动的瞬间,齿与齿之间会卡位,这时线圈中的电流会加大,而导致铁轴串动,串动就会解卡,所以在固定马达时千万不要把轴在轴的方向上固定死(致少要有0.5mm的余量)。
电机设计课后答案陈世坤第二版电机的主要尺寸是指什么它们由什么决定答 电机的主要尺寸是指电枢铁心的直径和长度。对于直流电机电枢直径是指转子外径对于一般结构的感应电机和同步电机则是指定子内径。它们由计算功率P’决定。2电机的主要尺寸间的关系是什么根据这个关系式能得出哪些重要结论答电机的主要尺寸间的关系是D2lefn/P’=6.1/(αp’KNmKdpABδ).根据这个关系式得到的重要结论有:①电机的主要尺寸由其计算功率P’和转速n之比P’/n或计算转矩T所决定;②电磁负荷A和Bδ不变时相同功率的电机转速较高的尺寸较小尺寸相同的电机转速较高的则功率较大。这表明提高转速可减小电机的体积和重量。③转速一定时若直径不变而采取不同长度则可得到不同功率的电机。④由于极弧系数αp’、KNm与Kd的数值一般变化不大因此电机的主要尺寸在很大程度上和选用的电磁负荷A和Bδ有关。电磁负荷选得越高电机的尺寸就越小。3磁路计算的目的? 答磁路计算的目的在于确定产生主磁场所必需的磁化力或励磁磁动势并进而计算励磁电流以及电机的空载特性。通过磁路计算还可以校核电机各部分磁通密度选择是否合适。4磁路计算所依据的基本原理答磁路计算所依据的基本原理是安培环路定理。积分路径沿着磁场强度矢量取向磁力线则。等式左边为磁场H在dl方向上的线积分所选择的闭合回路一般通过磁极的中心线等式右边为回路包围的全电流即等于每对极的励磁磁势。5电机的磁路可分为几段进行为什么气隙磁压降占整个回路磁压降很大的比例答电机的磁路可分为如下各段空气隙定子齿或磁极转子齿或磁极定子轭转子轭。因为空气隙的磁导率比铁的磁导率小得多所以气隙磁阻比铁心磁阻大得多,又因为Um=ΦmRm.所以气隙磁压降比铁心磁压降大得多,故气隙磁压降占整个回路磁压降很大的比例. 6在电机设计时通常对铁心磁密BFe取硅钢片磁化曲线的饱和点,为什么? 答:铁心磁密的饱和点为BFe=1.5T.当BFe小于1.5T时,材料利用不够.当BFe 大于1.5T时,过饱和点,上升幅度不大.而且又需要更大的励磁电流、损耗和成本都会增加.所以应取BFe=1.5T. 7计算交流电机齿联轭的轭部磁压降时一般取什么磁密为计算磁密?为什么引入轭部磁压降校正系数Cj这一概念? 答:计算交流电机齿联轭的轭部磁压降时,一般取轭部切向最大磁密Bj作为计算磁密.因为齿联轭磁密分布不均匀,齿联轭磁路全长上的磁压降为了简化计算,引用一个等效的均匀磁场代替不均匀磁场 和Hj存在值不同,引入磁压降校正系数Cj=HjjavH来修正. 8在磁路计算中,当齿部磁密超过1.8T时,为什么要进行修正? 答:齿部磁密超过1.8T,此时齿部磁密比较饱和,铁的磁导率μ.比较低,使齿部的磁阻和槽部相比差别不是很大.这样,一个齿距内的磁通大部分将由齿部进入轭部,部分磁通通过槽部进入轭部.因而齿部中的实际磁通密度B 比通过公式Bδleft/(KeFbltt')小些.即实际的磁场强度及磁压降也会小一些,所以要进行修正. 9异步电机与同步电机绕组漏抗分别由哪几部分组成? 答:异步电机:槽漏抗,谐波漏抗,端部漏抗,斜槽漏抗. 同步电机:槽漏抗,谐波漏抗,齿顶漏抗,端部漏抗. 10交流电机定子单层整距绕组每槽漏感Ls'如何计算? 答:高度h.范围内全部槽中电流产生的漏磁链Ψs1=Ns(Bs1S)=Ns*S*μ.2INs/bs=N2s2Iμ.h.lef/bs.高度h1范围内距槽底X处高dx的范围内产生的漏磁链dΨs2=(Ns*x/h1)dΦx=(Ns*x/h1)22Iμ.lefdx/bs.高度h1范围内由槽中电流产生的漏磁链为槽漏磁链总和Ψs=Ψs1+Ψs2=N2s2μ。Lef(h./bs+h1/(3bs)).即每槽漏感为 为槽宽电机的损耗分别为哪几种?哪些损 耗是不变损耗?哪些损耗是可变损耗哪些损耗是主要损耗哪些损耗是次要损耗答 电机的损耗分别为①定子转子铁心中的基本铁耗②空载时铁心中的附加杂散损耗③电气损耗④负载时的附加杂散损耗⑤机械损耗。其中①②⑤为不变损耗③④为可变损耗。①③⑤为主要损耗②④为次要损耗。12为什么所有电机的机械损耗都为
DESIGN AND TEST OF VERY LARGE DIAMETER, BRUSHLESS PERMANENT MAGNET TORQUE MOTORS FOR THE VERY LARGE TELESCOPE M.Venturini, A.Vismara PHASE MOTION CONTROL via Lungobisagno Istria 27 a,b/R 16141 - Genova - ITALY e-mail: andrea.vismara@phase.it Paper presented at POWERSYSTEMS WORLD ‘96, 1996, Las Vegas, USA ABSTRACT This paper describes the design and test of the drive systems for the four Very Large Telescopes (VLT) of the European Southern Observatory (ESO), currently under construction on Cherro Paranal, Chile. These huge and complex machines have exceptional requirements on movement smoothness and controllability. Direct drive was deemed necessary to get the best dynamic performance; an ad-hoc design was developed. In this design, the Azimuth axis is powered by a 10 m diameter dual axial gap, brushless permanent magnet motor, with the design target of 250000 Nm peak torque and 210 Nm (less than 0.1% to peak) cogging torque. With the same architecture, the Altitude (elevation) axis is powered by two coupled 2.5 m diameter motors, with the design target of 72000 Nm peak torque and 60 Nm cogging torque. The first fully operational telescope is nearing completion in Milan, Italy, where operational tests are being performed. The motor tests fully confirmed the expected performances, within 1% from specifications. A new version of the motor was also mounted on a large milling head for machine tool, now completing the first year of continuous operation. Direct drive proved to be applicable to any motor size, guaranteeing high performance and elegant machine architecture, while also reducing overall system cost. A full line of large diameter torque motor was developed and full production is starting. 1. I NTRODUCTION The Very Large Telescope (VLT) project, operated by the European Southern Observatory, will consist of four of the largest optical telescopes ever built, each with a monolithic 8 m diameter primary mirror, which will also be able to combine their light output in a coherent optical path, to operate in interpherometric mode with the resolution of a telescope as large as the distance between the farthest units. This extremely ambitious project, whose ultimate goal is to increase of an order of magnitude the size of the known universe, represents the utmost technical challenge in the motion control field as well. Traditionally, large optical telescopes could never attain a very high angular resolution (at best in the 0.1 arcsec range), mostly due to optical aberration of the large primary mirrors and to atmospheric turbulence. In general, an increase in size would only worsen those plagues, so that the largest telescopes were often disparagingly referred to as “light buckets”. The advent of novel techniques, such as active optics and adaptive control of the light path, with the promise to nullify atmospheric turbulence, put the possibility of a stunning 0.01 arcsec in imaging and an order of magnitude less in interpherometry resolution within reach. The impact of this potential on telescope attitude control can be appreciated considering that one of the VLT telescopes, with 20 m diameter and 400 metric tons mass, must be controlled within less than 0.4 m m increments on the 10 m diameter tracks just to achieve a 0.01 arcsec resolution. For an observatory on a mountain top, wind gusts could be a cause of major concern, producing variable frequency disturbances on the telescope structure. As the maximum availability of this very expensive machines is of utmost importance, the observation performances must be maintained even while sustaining rapidly varying winds. Furthermore, the controllability at extremely low speeds is particularly important while performing long exposure observation.
3 无刷直流电动机的电磁设计 3.1 基本要求和主要指标 3.1.1基本要求 (1) 运行方式 直流无刷电动机的运行方式有连续、短时和断续三种 (2) 防护形式 一般直流电动机的防护型式主要有防护式和封闭式两种。 (3) 温升 一般交流电机包括同步电机和感应电机,转子不计算铁耗,然而该类电机正常稳态运行时,定子绕组产生的2个旋转磁场转速与转子本体转速存在较大的转差,转子铁芯损耗不容忽视。不仅电磁设计时,其电磁负荷的选择应与常规电机有所区别,而且对通风冷却结构设计应予足够的重视。 (4) 效率 (5) 电动机的转速变化率 明确电机转速运行的最大区间,并应指明电机的常用转速区间,以便选择合适的电机数据,获得良好的力能指标。 3.1.2主要指标 ①额定功率P N = 100W ②额定电压U N = 270V ③额定转速n N = 1000 r/min ④定子相数m = 3 ⑤极对数p = 4 ⑥定子槽数Z = 18 3.2 主要尺寸的确定 3.2.1 定子铁心内径D a的选择
我国目前制造的直流电机,其D a 与输出功率P N 的关系曲线如下,它可以作为选定D a 的初步依据。 由于P N /n N =0.0001,从张琛的《直流无刷电动机原理及应用》中图3.1定子内径D a 与单位转速输出功率P N /n N 的关系曲线查得: cm D a 5.5~0.4=,则取cm D a 5= 3.2.2 电磁负荷的选择 电负荷A 与磁负荷B 的选择与电动机的主要尺寸直接相关。同时,A ,B 的选择与电动机的运行性能和使用寿命也密切相关,因此必须全面考虑各种因素,才正确选择A,B 的值。 (1) 线负荷A 高,磁负荷B 不变 ① 电机体积减小,节约材料 ② B 一定时,由于铁心重量减小,铁耗减小 ③ 绕组用铜量增加 ④ 增大电枢单位表面上铜耗,绕组温升增高 ⑤ 影响电机参数和电机特性: q a =ρAJ (2) 磁负荷B 高,线负荷A 不变 ① 电机体积减小,节约材料 ② 基本铁耗增大 ③ 磁路饱和程度增大 ④ 影响电机参数和电机特性 电负荷A 与磁负荷B 与定子的内径D a 有关,根据已生产的电动机的经验数据绘制成曲线。 由于D a =5cm ,由张琛的《直流无刷电动机原理及应用》中图3.2电负荷A 与定子内径D 的关系得电负荷A=75~150A/cm ,取A =90。 由于D a =5cm ,由张琛的《直流无刷电动机原理及应用》中图3.3磁负荷B 与定子内径D 的关系得磁负荷B=0.50~0.65T ,取B=0.55T 3.2.3 转子磁钢计算长度L a 的确定 先确定极弧系数δα,由经验数据得确定9.0=δα。 转子磁钢计算长度: n p k AD B L D a a ???=ηαδδ27 101.6 ,则cm L a 0.7=
电机设计陈世坤版知识点、公式总结整理
目录 第一章感应电动机设计 (1) 第二章 Y132m2-6型三相感应电动机电磁计算 (4) 附录参考文献 (27)
第一章感应电动机设计 一、电机设计的任务 电机设计的任务是根据用户提出的产品规格(如功率、电压、转速等)、技术要求(如效率、参数、温升限度、机械可靠性要求等),结合技术经济方面国家的方针政策和生产实际情况,运用有关的理论和计算方法,正确处理设计是遇到的各种矛盾,从而设计出性能良好、体积小、结构简单、运行可靠、制造和使用维修方便的先进产品。 二、感应电机设计时给定的数据 (1)额定功率 (2)额定电压 (3)相数及相间连接方式 (4)额定频率 (5)额定转速或同步转速 (6)额定功率因数 三、电机设计的过程和内容
1、准备阶段 通常包括两个方面的内容:首先是熟悉相关打国家标准,手机相近电机的产品样本和技术资料,并听取生产和使用单位的意见和要求;其次是在国家标准及分析有过资料的基础上编制技术任务书或技术建议书。 2、电磁设计 本阶段的任务是根据技术任务书的规定,参照生产实践经验,通过计算和方案比较来确定与所设计电机电磁性能有关的的尺寸和数据,选定有关材料,并和算其电磁性能。 3、结构设计 结构设计的任务是确定电机的机械结构、零部件尺寸、加工要求与材料的规格及性能要求,包括必要的机械计算及通风和温升计算。 结构设计通常在电磁设计之后进行,但有时也和电磁设计平行交叉的进行,以便相互调整。
第二章 Y132m2-6型三相感应电动机电磁计算 一、额定数据及主要尺寸 1、输出功率 N P =5.5kW 2、外施相电压 N U φ=N U =380V (?接) 3、功电流 KW I =1N N P mU φ =35.5103380??=4.82A 4、效率 N η=85.3% 5、功率因数 cos N ?=0.78 6、极对数 p=3 7、定转子槽数1Z =36。2Z =33 8、定转子每极槽数 1p Z = 12Z p =366=6。 2p Z =22Z p =336=51 2 9、定转子冲片尺寸 1D =210mm 。1i D =148mm 。 2i D =48mm 。 2D = 1i D -2δ=148-2?0.35=147.3mm 定子采用梨型槽,尺寸如下:11b =6.8mm 、21r =4.4mm 、01h =0.8mm 、 11h +21h =11.5mm 、 01b =3.5mm 定子齿宽计算如下:
目录 摘要 (1) ABSTRACT (1) 第一章中小型电机设计概述 (2) 1.1设计技术要求 (2) 1.2电机主要尺寸 (2) 1.3绕组构及成原理 (4) 1.4主磁路 (4) 1.5电抗 (6) 1.6损耗与效率 (7) 1.7通风散热 (7) 第二章三相异步电动机设计(Y180L-6/15KW) (9) 2.1电机主要尺寸及绕组设计 (9) 2.2电磁计算步骤与程序 (9) 第三章电机优化设计方案 (28) 3.1相关理论分析 (28) 3.2电磁调整方案 (28) 第四章 AUTOCAD简介及其绘图 (30) 4.1A UTO CAD简介 (30) 4.2A UTO CAD的基本功能 (30) 4.3A UTO CAD绘图 (31) 总结 (32) 参考文献: (32) 附录(Ⅰ)外文资料原文及译文 (34) 附录(Ⅱ)三设计方案结果 (39)
三相鼠笼式异步电动机设计(Y180L-6 /15kW)专业:电气工程极其自动化学号:02131107 学生姓名:刘常洲指导老师:肖倩华 摘要 异步电机是工农业生产中应用最广泛的电机。其性能的提高具有重要意义。在文章中简要介绍了异步电机设计的基础知识,阐述了中小型电机的设计方法与步骤,介绍了电磁设计的步骤与计算程序,也述及电机的优化设计。 电磁设计是根据设计技术要求确定电机的电磁负荷,计算转子、定子冲片和铁心各部分尺寸及绕组数据,进而核算电机各项参数及性能,并对设计数据做必要的调整,直到达到设计要求。本文也简单介绍了AutoCAD 绘图的基础知识。 关键词:异步电机电磁计算 The design of the Three-phase squirrel cage induction motor (Y180L-6 /15kW) Abstract The induction motor is the most widespread electrical machinery in the industry and agriculture production . Its performance enhancement has the vital significance. In this article , the elementary knowledge of the induction motor designs is Briefly introduced, the method and the step of the middle and small scale electrical machinery design is also elaborated, the electromagnetism design step and the design computational procedure is introduced, the optimized design of the electrical machinery is also mentioned. The electromagnetism design is according to the specification of designs to determine the electromagnetism load, calculates each part of sizes of the rotor、 the stator piece and iron core and the winding data, then calculates each parameter and the performance of the electrical machinery, and to make the essential adjustment to the designs data, until meets the design requirements. AutoCAD cartography elementary knowledge is also simply introduced in this article. Keywords:induction motor electromagnetism computation