
实验八 状态反馈与状态观测器的工程应用
一、实验目的
1、对一个实际系统,建立该系统的数学模型,了解模型线性化的方法,最终获得 系统的状态空间描述,并对系统进行稳定性,能控性,能观性检查。
2、根据控制要求,采用极点配置方法设计状态反馈控制器,并利用全维状态观测 器来实现状态反馈。
二、实验要求
1、 对实验系统进行稳定性,能控性及能观性检查
2、 用状态反馈方法使起重机系统按期望速度到达B 点
3、 全维状态观测器的设计
4、 观测器的引入对闭环系统的影响
三、实验内容
为研究起重机的防摆控制问题,需对实际问题进行简化、抽象。起重机的“搬运—行走—定位”过程可以抽象为如图2.1所示的情况,即起重机在受到外力F 作用下,能够在较短时间内从A 点运动到B 点,且摆角不超过系统允许的最小摆角。图中m 是重物的质量(kg );
m 0为起重机的质量(kg ),g 为重力加速度(m/s 2
),F 为小车受到水平方向上的拉力(N),l
为绳长,此处假设绳长保持不变。考虑到实际起重机运行过程中摆角较小(不超过10o
),且
平衡位置θ = 0,因此在sin θ ≈θ , cos θ ≈ 1, θ2
sin θ ≈ 0的近似条件下的起重机系统的简化模型如图2.2所示
图2.1 起重机受力分析过程 图2.2 起重机系统的简化模型
选取小车的位移x 及其速度x θ及角速度θ作为状态变量,x 为输出变
量。假设系统参数为m 0=50kg , m=5kg ,l=1m, g=9.8m/s 2,则可以列出起重机系统的状态空间表达形式。
由此模型可知,拉力F 为输入变量,所以对于此系统,G(s)=X(s)F(s) = S^2+9.850S^4+539S^2
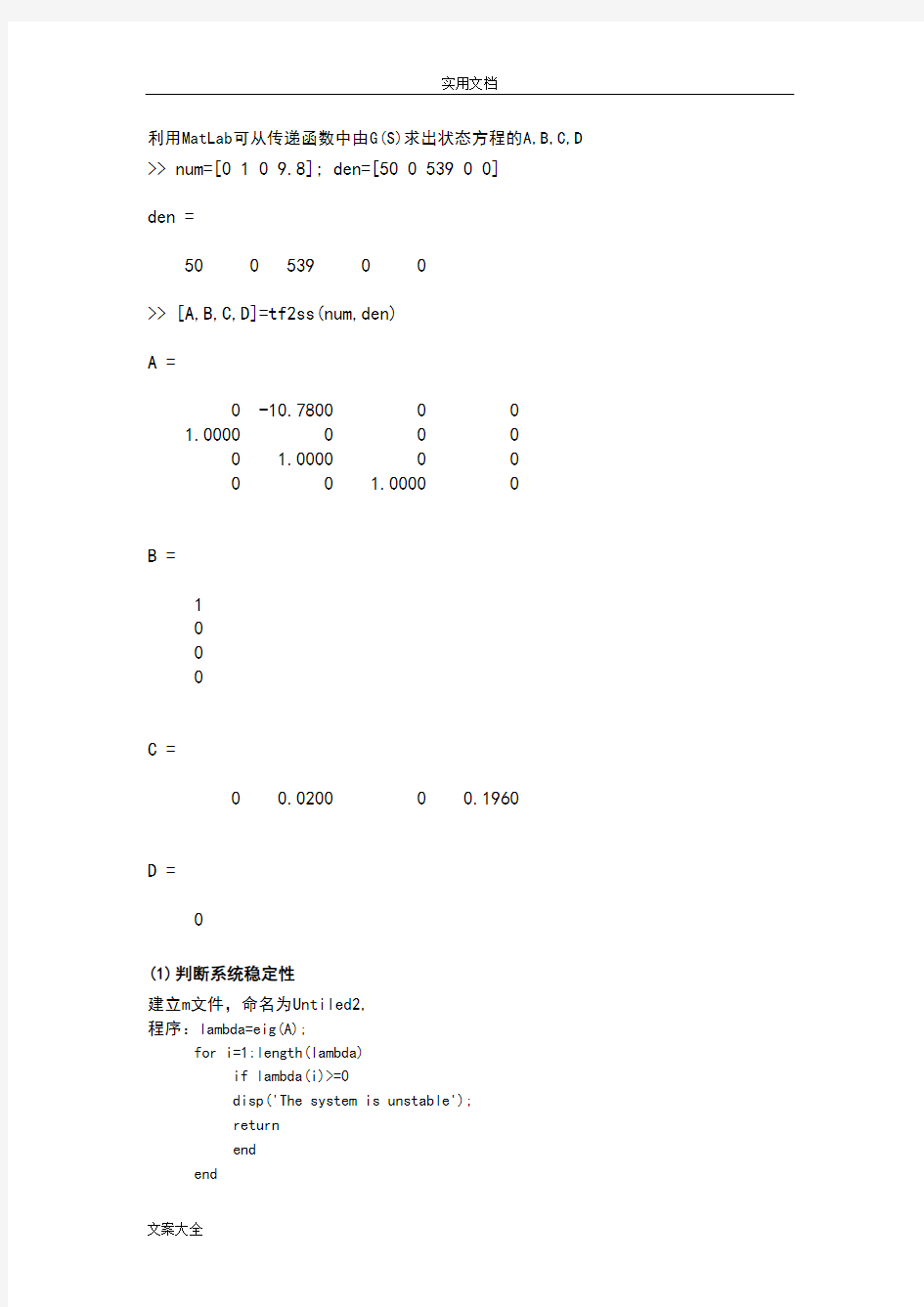
利用MatLab可从传递函数中由G(S)求出状态方程的A,B,C,D >> num=[0 1 0 9.8]; den=[50 0 539 0 0]
den =
50 0 539 0 0
>> [A,B,C,D]=tf2ss(num,den)
A =
0 -10.7800 0 0
1.0000 0 0 0
0 1.0000 0 0
0 0 1.0000 0
B =
1
C =
0 0.0200 0 0.1960
D =
(1)判断系统稳定性
建立m文件,命名为Untiled2,
程序:lambda=eig(A);
for i=1:length(lambda)
if lambda(i)>=0
disp('The system is unstable');
return
end
end
disp('The system is stable');
运行结果为:>> Untitled2
The system is unstable
所以这个系统是不稳定的。
(2)判断系统的能控性或能观性
建立m文件,命名为Untiled3,
n=length(A);
Qc=[B];Qo=[C];
for i=1:n-1
Qc=[Qc A^(i)*B];Qo=[Qo;C*A^(i)];
end
if rank(Qc)==n
disp('the system is conctrollable');
else
disp('the system is unconctrollable');
end
if rank(Qo)==n
disp('the system is observable');
else
disp('the system is disobservable');
end
运行结果为:>> Untitled3
the system is conctrollable
the system is observable
所以起重机系统能控能观。
(3)极点配置
建立m文件,命名为pole_assignment
程序如下:function K=pole_assignment(A,B,lambda)
n=length(A);
JA=poly(A);
JJA=poly(lambda);
Q=[B];
for i=1:n-1
Q=[A^(i)*B Q];
end
T=zeros(n,n);
for i=1:n
T=T+sparse(i:n,1:n-i+1,JA(i)*ones(1,n-i+1),n,n);
end
P=Q*T;
K=(JJA(n+1:-1:2)-JA(n+1:-1:2))*(inv(P));
并根据系统要求,在Command窗口中输入:
>> lambda=[-1+sqrt(3)*j -1-sqrt(3)*j -6 -6];
>> K=pole_assignment(A,B,lambda)
得到结果:
K =
14.0000 53.2200 120.0000 144.0000
构造状态反馈控制律为u v kx ,其中K K1 K2 K3 K4]分别是状态x, x, , 反馈至v的增益,使得系统极点配置到期望位置。
给定起重机初始条件:偏离角度(0)=0.6弧度,(0)=0 ,z(0)=0 ,z(0)=0 ,
时,采用Simulink 对起重机的反馈控制系统进行仿真验证,绘出反馈控制系统的状态响应曲线,观察其能否返回到参考位置((0) 0, z(0) 0)以及响应速度是否
符合设计要求。
搭建Simulink仿真模型
图3.3 Simulink仿真模型
具体模块的参数设置如下:
图3.4 State-Space内部参数设置Gain
图3.5 Gain内部参数设置
Gain1
图3.6 Gain内部参数设置
状态变量图:
图3.7 状态变量示波器显示
输出结果如下:
图3.8 输出示波器结果
说明其返回了最初参考值,符合设计要求。
(5)全维状态观测器
计算观测器的参数阵L,应要求观测器的特征值为[-2+j -2-j -8 -9] Matlab编程如下:
lambda=[-2+j -2-j -8 -9];
>> k=pole_assignment(A,B,lambda);
>> k=acker(A,B,lambda)
k =
21.0000 134.2200 373.0000 360.0000
>> L=k'
L =
21.0000
134.2200
373.0000
360.0000
Simulink模型搭建如下图:
图3.9 无反馈的状态观测器模型各状态观测器的图像如下图:
Scope3:
图3.10 第一个状态变量波形
Scope2:
图3.11 第二个状态变量波形Scope1:
图3.12 第三个状态变量波形
Scope:
图3.13 第四个状态变量波形
(6) 带观测器的反馈控制系统
状态方程和输出方程如下:
[]??????==??
?
???+????????????--=??????x
x C
Cx y v B x x LC A BK BK A x x ~00~0
~
所以??
?
?
?
?--LC A BK BK A 0
= P
??
????0B =
[]0C
=[ 0 0.0200 0 0.1960 0 0 0 0]
求系统矩阵P 的特征根 >> eig(P)
ans =
-6.0000 -6.0000 -1.0000 + 1.7321i -1.0000 - 1.7321i -72.2259 0.0011 + 3.2781i 0.0011 - 3.2781i -1.0207
根据主导极点的定义,其为在系统所有的闭环极点中,距离虚轴最近且周围无闭环零点的极点。因此主导极点: -1.0000 + 1.7321i 和 -1.0000 - 1.7321i
Simulink 仿真图如下:
图3.14 带反馈的状态观测器的模型对于State-Space1参数的设置如下
图3.15 State-Space内部参数设置
其中上图中A=A-L*C,B=[B-L*D L],C=I,D=[D 0] 响应曲线为:
Scope4:
图3.16
Scope3:
图3.17 带反馈的第一个状态变量波形Scope2:
图3.18 带反馈的第二个状态变量波形Scope1:
图3.18 带反馈的第三个状态变量波形
Scope:
图3.19 带反馈的第四个状态变量波形
四、思考题
(1)说明反馈控制闭环期望极点和观测器极点的选取原则。
答:对于反馈控制闭环期望极点:首先闭环极点一定选在左半平面上,由于本系统为高阶系统,在高阶系统中,通常可以根据上升时间,超调量,回复时间等性能指标,按照主导极点的原则来选取。
具体如下:选择一对期望的主导极点,其余极点选在距主导极点左边较远的地方,不过此时系统的零点应该位于左半开平面上距离虚轴较远的地方,使得其余极点及可能出现的零点对系统动态性能的影响较小。
对于观测器极点:需使观测器的期望极点在闭环反馈系统A-BK极点的左边不远处,一般地,期望极点的选择应使状态观测器的响应速度至少比所考虑的闭环系统响应速度快2—5倍
(2)说明增益矩阵对(K,L)的变化对系统性能的影响关系。
反馈系统期望极点在S平面上向左移动,响应速度变快,但控制信号明显加大,超调量增加,反之,则控制信号较小,但响应时间变长。
观测器极点在S平面上向左移动,观测器状态逼近实际状态的速度加快,但增益矩阵L也随之增大,实验起来较为困难,易产生饱和。
(3)说明观测器的引入对系统性能的影响。
答:提高系统的阶次,会使系统响应变慢,计算复杂。
通信工程专业综合实验 实验报告 (移动通信系统和网络协议部分) 姓名: 学号: 班级: 指导教师:
实验一:主被叫实验 一、实验目的 1、掌握移动台主叫正常接续时的信令流程。 2、了解移动台主叫时被叫号码为空号时的信令流程。 3、了解移动台主叫时被叫用户关机或处于忙状态时的信令流程。 4、了解移动台主叫时被叫用户振铃后长时间不接听的信令流程。 5、掌握移动台被叫正常接续时的信令流程。 6、掌握通话结束呼叫释放时的信令流程。 7、了解被叫用户振铃后长时间不接听时移动台被叫的信令流程。 二、实验仪器 1、移动通信实验箱一台; 2、台式计算机一台; 3、小交换机一台: 三、实验原理 处于开机空闲状态的移动台要建立与另一用户的通信,在用户看来只要输入被叫号码,再按发送键,移动台就开始启动程序直到电话拨通。实际上,移动台和网络要经许多步骤才能将呼叫建立起来。以移动台和移动台进行通信为例,就包括主叫移动台和主叫MSC建立信令链接、主叫MSC通过被叫电话号码对被叫用户进行选路,即寻找被叫所处的MSC、被叫MSC寻呼被叫MS并建立信令连接过程等三个过程。本实验主要是让学生掌握移动通信中移动台主叫时MS和MSC之间的信令过程、以及为了完成通话连接,主叫MSC和被叫MSC之间的信令过程(即七号信令中的部分消息)。 四、实验内容 1、记录正常呼叫的过程中,移动台主叫部分和被叫部分的信令流程 2、记录被叫关机时,移动台主叫部分的信令流程 3、记录被叫振铃后无应答时,移动台主叫部分和被叫部分的信令流程 4、记录被叫号码无效时,移动台主叫的信令流程 5、记录通话结束后,呼叫链路释放的信令流程 五、实验步骤 主叫实验: 1、通过串行口将实验箱和电脑连接,给实验箱上电。将与实验箱相连的电脑上的学生平台程序打开。在主界面上双击“主叫实验”图标,进入此实验界面。 2、点击“初始化”键,看到消息框中出现“初始化”完成。再点击“开机”键,从而使移动台处于开机状态。
实验报告 ( 2016-2017年度第二学期) 名称:《现代控制理论基础》 题目:状态空间模型分析 院系:控制科学与工程学院 班级: ___ 学号: __ 学生姓名: ______ 指导教师: _______ 成绩: 日期: 2017年 4月 15日
线控实验报告 一、实验目的: l.加强对现代控制理论相关知识的理解; 2.掌握用 matlab 进行系统李雅普诺夫稳定性分析、能控能观性分析; 二、实验内容 1 第一题:已知某系统的传递函数为G (s) S23S2 求解下列问题: (1)用 matlab 表示系统传递函数 num=[1]; den=[1 3 2]; sys=tf(num,den); sys1=zpk([],[-1 -2],1); 结果: sys = 1 ------------- s^2 + 3 s + 2 sys1 = 1 ----------- (s+1) (s+2) (2)求该系统状态空间表达式: [A1,B1,C1,D1]=tf2ss(num,den); A = -3-2 10 B = 1 C = 0 1
第二题:已知某系统的状态空间表达式为: 321 A ,B,C 01:10 求解下列问题: (1)求该系统的传递函数矩阵: (2)该系统的能观性和能空性: (3)求该系统的对角标准型: (4)求该系统能控标准型: (5)求该系统能观标准型: (6)求该系统的单位阶跃状态响应以及零输入响应:解题过程: 程序: A=[-3 -2;1 0];B=[1 0]';C=[0 1];D=0; [num,den]=ss2tf(A,B,C,D); co=ctrb(A,B); t1=rank(co); ob=obsv(A,C); t2=rank(ob); [At,Bt,Ct,Dt,T]=canon(A,B,C,D, 'modal' ); [Ac,Bc,Cc,Dc,Tc]=canon(A,B,C,D, 'companion' ); Ao=Ac'; Bo=Cc'; Co=Bc'; 结果: (1) num = 0 01 den = 1 32 (2)能控判别矩阵为: co = 1-3 0 1 能控判别矩阵的秩为: t1 = 2 故系统能控。 (3)能观判别矩阵为: ob = 0 1
中南大学信息科学与工程学院实验报告 姓名:安磊 班级:计科0901 学号: 0909090310
指导老师:宋虹
目录 课程设计内容 ----------------------------------- 3 uC/OS操作系统简介 ------------------------------------ 3 uC/OS操作系统的组成 ------------------------------ 3 uC/OS操作系统功能作用 ---------------------------- 4 uC/OS文件系统的建立 ---------------------------- 6 文件系统设计的原则 ------------------------------6 文件系统的层次结构和功能模块 ---------------------6 文件系统的详细设计 -------------------------------- 8 文件系统核心代码 --------------------------------- 9 课程设计感想 ------------------------------------- 11 附录-------------------------------------------------- 12
课程设计内容 在uC/OS操作系统中增加一个简单的文件系统。 要求如下: (1)熟悉并分析uc/os操作系统 (2)设计并实现一个简单的文件系统 (3)可以是存放在内存的虚拟文件系统,也可以是存放在磁盘的实际文件系统 (4)编写测试代码,测试对文件的相关操作:建立,读写等 课程设计目的 操作系统课程主要讲述的内容是多道操作系统的原理与技术,与其它计算机原理、编译原理、汇编语言、计算机网络、程序设计等专业课程关系十分密切。 本课程设计的目的综合应用学生所学知识,建立系统和完整的计算机系统概念,理解和巩固操作系统基本理论、原理和方法,掌握操作系统开发的基本技能。 I.uC/OS操作系统简介 μC/OS-II是一种可移植的,可植入ROM的,可裁剪的,抢占式的,实时多任务操作系统内核。它被广泛应用于微处理器、微控制器和数字信号处理器。 μC/OS 和μC/OS-II 是专门为计算机的嵌入式应用设计的,绝大部分代码是用C语言编写的。CPU 硬件相关部分是用汇编语言编写的、总量约200行的汇编语言部分被压缩到最低限度,为的是便于移植到任何一种其它的CPU 上。用户只要有标准的ANSI 的C交叉编译器,有汇编器、连接器等软件工具,就可以将μC/OS-II嵌入到开发的产品中。μC/OS-II 具有执行效率高、占用空间小、实时性能优良和可扩展性强等特点,最小内核可编译至2KB 。μC/OS-II 已经移植到了几乎所有知名的CPU 上。 严格地说uC/OS-II只是一个实时操作系统内核,它仅仅包含了任务调度,任务管理,时间管理,内存管理和任务间的通信和同步等基本功能。没有提供输入输出管理,文件系统,网络等额外的服务。但由于uC/OS-II良好的可扩展性和源码开放,这些非必须的功能完全 可以由用户自己根据需要分别实现。 uC/OS-II目标是实现一个基于优先级调度的抢占式的实时内核,并在这个内核之上提供最基本的系统服务,如信号量,邮箱,消息队列,内存管理,中断管理等。 uC/OS操作系统的组成 μC/OS-II可以大致分成核心、任务处理、时间处理、任务同步与通信,CPU的移植等5个部分。如下图:
北京化工大学 Model of Final Examination of 《Inorganic Chemistry》 (bi-lingual course) C H M 2 1 7 0 T Course code 课程代码 Class No.: Name and ID: Items (题号) 一二三四五六Total score(总分) Score(得分) 一、是非题:(判断下列叙述是否正确,正确的在括号中画√,错误的画×。不必 写在答题纸上。)(本大题共10小题,每题1分,共10分) ( )1.在一定温度条件下,化学反应的恒压反应热只与系统的始态和终态有 关,因此化学反应热是状态函数。 ( )2.按照金属键理论,金属能导电传热是因为存在导带,而金属镁中只有 满带和空带,所以金属镁晶体不能导电。 ( )3.对一个化学反应,其速率常数总是随温度的升高而增大,因此增加反 应温度总有利于反应的正向进行。 ( )4.任何反应都是由元反应或由元反应复合而成的,只要了解了化学反应 的反应机理,由反应机理可得出其总的反应速率方程式。 ( )5.通常情况下,一个过程的自发进行方向在反应机理不发生变化的情况 下,高温时由熵变决定,低温下由焓变决定。 ( )6.当一个原子得到电子时,半径增大,极化力变小,极化率增大。 ( )7.电子亲和能是指一个原子得到电子后放出的能量,由于原子核在外层 有正电场存在,对电子有吸引能力,因此电子亲和能一定小于零。 ( )8.凡中心原子以sp3形式杂化的分子,其空间构型都是正四面体。
8 ( )9.经实验测定,配合物K[Fe(CN)]的磁距为2.41,接近于 36 =2.83。因此此配合物中未成对电子数为2。 ( )10.因CaF的溶度积常数比CaCO的溶度积常数小,因此CaF 232 的溶解度一 定比CaCO的溶解度小。 3 二、选择题:(在下列各题中,选择出符合题意的答案,将其代号填入括号内。)(本大题共20题,每题1.5分,共30分) ( )1.已知 298 K时,Sn(s) + Cl 2(g)→SnCl2(s)的△r H(1) = -349.8 kJ·mol-1,SnCl 2(s) + Cl2(g) →SnCl4 (l) 的 △r H(2) = -195.4 kJ·mol-1, 则1 2Sn(s) + Cl2(g)→1 2 (g) 的△r H SnCl为: 4 A.-545.2 kJ·mol-1;B.-272.6 kJ·mol-1; C.154.4 kJ·mol-1-1 ;D.-154.4 kJ·mol。 ( )2.下列叙述中错误的是。 A.配位平衡是指溶液中配离子解离为中心离子和配体的解离平衡; B.配离子在溶液中的行为像弱电解质; C.对同一配离子而言K·K = 1; D.配位平衡是指配合物在溶液中解离为内界和外界的解离平衡。 ( )3.将10.7g NH Cl溶解于1L 0.1mol·L-1 NH·H 432 O中,该溶液的pH值为多少?K b(NH3·H2O)=1.8×10-5。 A.9.26; B.8.96; C.9.56; D.11.13。 ,最适合溶解CuS的溶液是: ( )4.CuS的K sp(CuS)=4×10-36 A.HNO;B.浓HCl;C.稀HCl;D.HAc。 3 ( )5.在下列过渡元素的氯化物水溶液中,那一种溶液的颜色最浅。 A.CuCl2;B.CoCl; C.MnCl;D.NiCl。 222( )6.在酸性溶液中,下列各组离子能在水溶液中稳定共存的是那一组2+2- A.Ba、Cr2O7;B.Mn2+3+ 、Cr; C.S2-3+2+ 、Fe;D.Sn、Fe3+。
华北电力大学 实验报告| | 实验名称状态空间模型分析 课程名称现代控制理论 | | 专业班级:自动化1201 学生姓名:马铭远 学号:2 成绩: 指导教师:刘鑫屏实验日期:4月25日
状态空间模型分析 一、实验目的 1.加强对现代控制理论相关知识的理解; 2.掌握用 matlab 进行系统李雅普诺夫稳定性分析、能控能观性分析; 二、实验仪器与软件 1. MATLAB7.6 环境 三、实验内容 1 、模型转换 图 1、模型转换示意图及所用命令 传递函数一般形式: MATLAB 表示为: G=tf(num,den),,其中 num,den 分别是上式中分子,分母系数矩阵。 零极点形式: MATLAB 表示为:G=zpk(Z,P,K) ,其中 Z,P ,K 分别表示上式中的零点矩阵,极点矩阵和增益。 传递函数向状态空间转换:[A,B,C,D] = TF2SS(NUM,DEN); 状态空间转换向传递函数:[NUM,DEN] = SS2TF(A,B,C,D,iu)---iu 表示对系统的第 iu 个输入量求传递函数;对单输入 iu 为 1。
例1:已知系统的传递函数为G(S)= 2 2 3 24 11611 s s s s s ++ +++ ,利用matlab将传递函数 和状态空间相互转换。 解:1.传递函数转换为状态空间模型: NUM=[1 2 4];DEN=[1 11 6 11]; [A,B,C,D] = tf2ss(NUM,DEN) 2.状态空间模型转换为传递函数: A=[-11 -6 -11;1 0 0;0 1 0];B=[1;0;0];C=[1 2 4];D=[0];iu=1; [NUM,DEN] = ss2tf(A,B,C,D,iu); G=tf(NUM,DEN) 2 、状态方程状态解和输出解 单位阶跃输入作用下的状态响应: G=ss(A,B,C,D);[y,t,x]=step(G);plot(t,x). 零输入响应 [y,t,x]=initial(G,x0)其中,x0 为状态初值。
中南大学信息科学与工程学院实验报告 :安磊 班级:计科0901 学号: 0909090310 指导老师:宋虹
目录 课程设计容 ----------------------------------- 3 uC/OS操作系统简介 ------------------------------------ 3 uC/OS操作系统的组成 ------------------------------ 3 uC/OS操作系统功能作用 ---------------------------- 4 uC/OS文件系统的建立 ---------------------------- 6 文件系统设计的原则 ------------------------------ 6 文件系统的层次结构和功能模块 --------------------- 6 文件系统的详细设计 -------------------------------- 8 文件系统核心代码 --------------------------------- 9 课程设计感想 ------------------------------------- 11 附录 -------------------------------------------------- 12
课程设计容 在uC/OS操作系统中增加一个简单的文件系统。 要求如下: (1)熟悉并分析uc/os操作系统 (2)设计并实现一个简单的文件系统 (3)可以是存放在存的虚拟文件系统,也可以是存放在磁盘的实际文件系统 (4)编写测试代码,测试对文件的相关操作:建立,读写等 课程设计目的 操作系统课程主要讲述的容是多道操作系统的原理与技术,与其它计算机原理、编译原理、汇编语言、计算机网络、程序设计等专业课程关系十分密切。 本课程设计的目的综合应用学生所学知识,建立系统和完整的计算机系统概念,理解和巩固操作系统基本理论、原理和方法,掌握操作系统开发的基本技能。 I.uC/OS操作系统简介 μC/OS-II是一种可移植的,可植入ROM的,可裁剪的,抢占式的,实时多任务操作系统核。它被广泛应用于微处理器、微控制器和数字信号处理器。 μC/OS 和μC/OS-II 是专门为计算机的嵌入式应用设计的,绝大部分代码是用C语言编写的。CPU 硬件相关部分是用汇编语言编写的、总量约200行的汇编语言部分被压缩到最低限度,为的是便于移植到任何一种其它的CPU 上。用户只要有标准的ANSI 的C交叉编译器,有汇编器、连接器等软件工具,就可以将μC/OS-II嵌入到开发的产品中。μC/OS-II 具有执行效率高、占用空间小、实时性能优良和可扩展性强等特点,最小核可编译至 2KB 。μC/OS-II 已经移植到了几乎所有知名的CPU 上。 严格地说uC/OS-II只是一个实时操作系统核,它仅仅包含了任务调度,任务管理,时间管理,存管理和任务间的通信和同步等基本功能。没有提供输入输出管理,文件系统,网络等额外的服务。但由于uC/OS-II良好的可扩展性和源码开放,这些非必须的功能完全可以由用户自己根据需要分别实现。 uC/OS-II目标是实现一个基于优先级调度的抢占式的实时核,并在这个核之上提供最基本的系统服务,如信号量,,消息队列,存管理,中断管理等。 uC/OS操作系统的组成 μC/OS-II可以大致分成核心、任务处理、时间处理、任务同步与通信,CPU的移植等5个部分。如下图:
湖南科技大学测控技术与仪器专业专业综合实验报告 姓名 学号 成绩 湖南科技大学机电工程学院 二0—三年 ^一月 ^一日目录 一、液压泵站综合控制实验 3 (一)实验目的 3 (二)实验内容 3 二、液压实验台PLC控制实验 4 (一)实验目的 4 (二)实验内容 4 —振动测试与故障诊断综合实验( 一) 一)实验目的 5 二)实验内容 5 四.振动测试与故障诊断综合实验(二)(一)实验目的 6 (二)实验内容 6 五.基于虚拟仪器的自动控制原理综合实验(一)实验目的7 (二)实验内容7 六.基于虚拟仪器的传感器综合实验8 (一)实验目的8 (二)实验内容8 七.地震仪器综合设计9 (一)实验目的9 (二)实验内容9 八.电法仪器综合设计10 (一)实验目的10 (二)实验内容10 九、实验心得11 一、液压泵站综合控制实验 (一)实验目的 了解液压控制的装置,熟悉PLC编程,并且了解 置的原理并且用于实践生活中去。(二)实验内容 此实验是液压的测量实验用PLC处理器控制来实现,液压PLC综合控制实验室是我公 司根据高校机电一体化对气、电、液控制的教学大纲要求,在我公司专利产品YY-18透明 液压传动演示系统的基础上,综合了我公司气动PLC与液压PLC控制实验设备的优点,采 用了开放型综合实验台结构,广泛征求专家教授与老师的意见,经不断创新改进研制而成的。是目前集气动控制技术、液压传动控制技术以及PLC可编程序控制器控制技术于一体 的理想的综合性实验设备。实验时,它们可以相互辅成,交叉控制。可以让学生直观、感性地对比、了解气、电、液各自具有的特点、特色、及优缺点等。 信号采集电路原理设计: (1)前置放大电路要求有阻抗匹配设计(前置放大器采用集成运放OP07、 采用电压负反馈设计、增益为10、50 两档手动设计) (2)主放大器采用级联组合程控放大、增益动态范围为10 至1500 倍之内。 (增益程档位要求有30 至40 梯度之内,具体每档增益值不做具体要求但要求梯度 增益呈线性) (3)主放大器末端输出值(Up-p)设计为5v,如有溢出则在设计说明中明。 PLC控制在工业领域的发展。理解液压装
现代控制理论实验报告
实验一系统能控性与能观性分析 一、实验目的 1.理解系统的能控和可观性。 二、实验设备 1.THBCC-1型信号与系统·控制理论及计算机控制技术实验平台; 三、实验容 二阶系统能控性和能观性的分析 四、实验原理 系统的能控性是指输入信号u对各状态变量x的控制能力,如果对于系统任意的初始状态,可以找到一个容许的输入量,在有限的时间把系统所有的状态引向状态空间的坐标原点,则称系统是能控的。 对于图21-1所示的电路系统,设iL和uc分别为系统的两个状态变量,如果电桥中 则输入电压ur能控制iL和uc状态变量的变化,此时,状态是能控的。反之,当 时,电桥中的A点和B点的电位始终相等,因而uc不受输入ur的控制,ur只能改变iL的大小,故系统不能控。 系统的能观性是指由系统的输出量确定所有初始状态的能力,如果在有限的时间根据系统的输出能唯一地确定系统的初始状态,则称系统能观。为了说明图21-1所示电路的能观性,分别列出电桥不平衡和平衡时的状态空间表达式: 平衡时:
由式(2)可知,状态变量iL和uc没有耦合关系,外施信号u只能控制iL的变化,不会改变uc的大小,所以uc不能控。基于输出是uc,而uc与iL无关连,即输出uc中不含有iL的信息,因此对uc的检测不能确定iL。反之式(1)中iL与uc有耦合关系,即ur的改变将同时控制iL和uc的大小。由于iL与uc的耦合关系,因而输出uc的检测,能得到iL 的信息,即根据uc的观测能确定iL(ω) 五、实验步骤 1.用2号导线将该单元中的一端接到阶跃信号发生器中输出2上,另一端接到地上。将阶跃信号发生器选择负输出。 2.将短路帽接到2K处,调节RP2,将Uab和Ucd的数据填在下面的表格中。然后将阶跃信号发生器选择正输出使调节RP1,记录Uab和Ucd。此时为非能控系统,Uab和Ucd没有关系(Ucd始终为0)。 3.将短路帽分别接到1K、3K处,重复上面的实验。 六、实验结果 表20-1Uab与Ucd的关系 Uab Ucd
实验报告 课程名称:嵌入式系统 学院:信息工程 专业:电子信息工程 班级: 学生姓名: 学号: 指导教师: 开课时间:学年第一学期
实验名称:IO接口(跑马灯) 实验时间:11.16 实验成绩: 一、实验目的 1.掌握 STM32F4 基本IO口的使用。 2.使用STM32F4 IO口的推挽输出功能,利用GPIO_Set函数来设置完成对 IO 口的配置。 3.控制STM32F4的IO口输出,实现控制ALIENTEK 探索者STM32F4开发板上的两个LED实现一个类似跑马灯的效果。 二、实验原理 本次实验的关键在于如何控制STM32F4的IO口输出。IO主要由:MODER、OTYPER、OSPEEDR、PUPDR、ODR、IDR、AFRH和AFRL等8个寄存器的控制,并且本次实验主要用到IO口的推挽输出功能,利用GPIO_Set函数来设置,即可完成对IO口的配置。所以可以通过了开发板上的两个LED灯来实现一个类似跑马灯的效果。 三、实验资源 实验器材: 探索者STM32F4开发板 硬件资源: 1.DS0(连接在PF9) 2.DS1(连接在PF10) 四、实验内容及步骤 1.硬件设计 2.软件设计 (1)新建TEST工程,在该工程文件夹下面新建一个 HARDWARE文件夹,用来存储以后与硬件相关的代码。然后在 HARDWARE 文件夹下新建一个LED文件夹,用来存放与LED相关的代码。 (2)打开USER文件夹下的test.uvproj工程,新建一个文件,然后保存在 LED 文件夹下面,保存为 led.c,在led.c中输入相应的代码。
(3)采用 GPIO_Set 函数实现IO配置。LED_Init 调用 GPIO_Set 函数完成对 PF9 和 PF10 ALIENTEK 探索者 STM32F407 开发板教程 119 STM32F4 开发指南(寄存器版) 的模式配置,控制 LED0 和 LED1 输出 1(LED 灭),使两个 LED 的初始化。 (4)新建一个led.h文件,保存在 LED 文件夹下,在led.h中输入相应的代码。 3.下载验证 使用 flymcu 下载(也可以通过JLINK等仿真器下载),如图 1.2所示: 图1.2 运行结果如图1.3所示:
会计学专业综合实验课实验报告 一、实验目的 会计模拟实验是缩短理论教学与社会实践的距离,培养我们动手能力的一个重要途径。通过实践使我们能比较系统、全面的掌握制造企业会计核算的基本程序和方法,加强对基本理论知识的理解,基本方法的运用和基本技能的训练,为将来会计工作打下坚实的基础。”课程要求我们同学各自独立完成全部会计模拟实验的内容,以便全面系统的掌握各项技能。通过实践将理论与实践结合起来,熟悉并掌握会计流程的各个步骤的具体操作,掌握会计的基本操作技能,加强理论知识的记忆,将书本上的理论知识运用到实践中去,真正的掌握这门知识。 二、实验原理 基于《会计基础工作规范》的要求,进行会计实验操作。 三、实验设备 福思特多媒体会计模拟实验室软件 四、结果预测 熟练掌握填制原始凭证和记账凭证,登记会计账簿,更正错误,财务报表编制。 五、实验步骤 (1)根据经济业务填制原始凭证 (2)根据原始凭证,填记帐凭证 (3)根据记帐凭证填各种明细帐,现金日记帐,银行日记帐(4)根据科目汇总表填总分类帐 (5)更正试例 (6)填写会计报表 六、实验结果 (一)原始凭证共363张 (二)记账凭证共173号213张
(三)科目汇总表共2号2张(四)总账账户共75个 (五)日记账账户共4个 (六)明细账账户共74个,其中 1、三栏式账户54个 2.数量金额式账户4个 3.多栏式账户16个 4.其他: (七)手工编制的报表 1、资产负债表(截图)
2.利润表(截图) 3.现金流量表(截图)
4.所有者权益变动表(截图) 七、实验分析
经过这些天的模拟实验、手工记账,使我的会计知识在实际工作中得到了验证,进一步深刻了我对会计的了解。加强了一定的基本实际操作能力,对会计流程的各个步骤和具体操作有了进一步的了解。同时,在这个过程中我学习到了很多之前没有留意到的会计处理知识和细节 (1)有一部分原始凭证的日期是需要大写的,且大部分的金额填写也是要大写的。而且,为了防止被他人恶意篡改,一些日 期的填写是需要添加“零”或者“壹”的,比如一月,在填 写汇票之类的应该写成“零壹月”;十一月,十二月应该写 成“壹拾壹月“,“壹拾贰月”。 (2)在填写记账凭证时,要填写完分录时应该将下面的空白处划上斜线,并且要注意在金额前面填上“¥”符号。这是我在 填写记账凭证的时候时常会忘记的细节。 (3)现金日记账和银行存款日记账每天都要结出“本日发生额和余额”,这也是经常性忽略的一个细节。 (4)在填写明细账时,分录涉及的每一个科目都要填写,之前一直以为只需要填写一个科目,导致了很多错误。 (5)在填写明细账的时候,很多时候不知道要选择什么样的格式,在三栏式和多栏式找科目找了很久,主要是因为初财的内容 不太扎实,所以导致了这种情况,在回忆了初级财务会计之 后,操作起来熟练了很多。 (6)15日填写科目汇总表的时候,没有理解清楚概念,将科目
_* 南京邮电大学通信学院 实验报告 实验名称:基于ADS开发环境的程序设计 嵌入式Linux交叉开发环境的建立 嵌入式Linux环境下的程序设计 多线程程序设计 课程名称嵌入式系统B 班级学号 姓名 开课学期2016/2017学年第2学期
实验一基于ADS开发环境的程序设计 一、实验目的 1、学习ADS开发环境的使用; 2、学习和掌握ADS环境下的汇编语言及C语言程序设计; 3、学习和掌握汇编语言及C语言的混合编程方法。 二、实验内容 1、编写和调试汇编语言程序; 2、编写和调试C语言程序; 3、编写和调试汇编语言及C语言的混合程序; 三、实验过程与结果 1、寄存器R0和R1中有两个正整数,求这两个数的最大公约数,结果保存在R3中。 代码1:使用C内嵌汇编 #include
printf("gcdnum:%d\n",a); return 0; } 代码2:使用纯汇编语言 AREA example1,CODE,readonly ENTRY MOV r0, #4 MOV r1, #9 start CMP r0, r1 SUBLT r1, r1, r0 SUBGT r0, r0, r1 BNE start MOV r3, r0 stop B stop END 2、寄存器R0 、R1和R2中有三个正整数,求出其中最大的数,并将其保存在R3中。 代码1:使用纯汇编语言 AREA examp,CODE,READONL Y ENTRY MOV R0,#10 MOV R1,#30 MOV R2,#20 Start CMP R0,R1 BLE lbl_a CMP R0,R2 MOVGT R3,R0 MOVLE R3,R2 B lbl_b lbl_a CMP R1,R2 MOVGT R3,R1 MOVLE R3,R2 lbl_b B . END 代码2:使用C内嵌汇编语言 #include
北京化工大学2010-2011《数字信号处理》期末考试
————————————————————————————————作者:————————————————————————————————日期:
北京化工大学2010——2011学年第一学期 《数字信号处理》试卷A 课程代码:EEE33500T 班级: 姓名: 学号: 分数: 题号 一 二 三 四 五 六 七 八 总分 得分 一、 填空:(每小题2分,共40分) (1) 两序列)(n x 和)(n h 的卷积和定义为)(*)()(n h n x n y == 。 (2) 序列)1.09 5 sin(3ππ+n 的周期为___ __。 (3) 分析离散时间系统6)(3)(+=n x n y 的线性特性,它是 性系统。 (4) 将两个单位冲击响应分别为)(1n h 和)(2n h 的离散系统进行级联形成的系统的单 位冲击响应为 。 (5) 线性时不变系统是因果系统的充分必要条件是 。 (6) 已知序列)(n x 的z 变换为1 11 )(--= az z X ,||||a z <,则)(n x = 。 (7) 数字角频率ω是模拟角频率Ω对抽样频率的归一化,其关系是 。 (8) 因果稳定系统的收敛域一定包含 。 (9) 序列)(n x 的傅立叶变换定义为)(ωj e X = 。 (10) 序列)(n x 的实部序列的傅立叶变换为=)]}({Re[n x DTFT 。 (11) 序列)(n x 的前向差分)(n x ?= 。 (12) 当系统输入为正弦序列时,则输出为 频率的正弦序列,其幅度受 ,而输出的相位则为输入相位与系统相位响应之和。
湖南科技大学测控技术和仪器专业 专业综合实验报告 班级 09测控三班 姓名 学号 指导老师付国红王启明 成绩 湖南科技大学机电工程学院 二〇一三年一月五日 目录 一、液压泵站综合控制实验 (3) (一)实验目的 (3) (二)实验内容 (3) 二、液压实验台PLC控制实验 (4) (一)实验目的 (4) (二)实验内容 (4) 三、物探仪器综合设计(①地震超前探测仪)................................. .... . (5) (一)实验目的 (5) (二)实验内容 (5) 四、物探仪器综合设计(②电法勘探仪器)............................ ........... .. (6) (一)实验目的 (6)
(二)实验内容 (6) 五、实验心得................................................................................... ..... .. (7) 一、液压泵站综合控制实验 (一)实验目的 了解液压控制的装置,熟悉PLC编程,并且了解PLC控制在工业领域的发展。理解液压装置的原理并且用于实践生活中去。 (二)实验内容 此实验是液压的测量实验用PLC处理器控制来实现,液压PLC综合控制实验室是我公司根据高校机电一体化对气、电、液控制的教学大纲要求,在我公司专利产品YY-18透明液压传动演示系统的基础上,综合了我公司气动PLC和液压PLC控制实验设备的优点,采用了开放型综合实验台结构,广泛征求专家教授和老师的意见,经不断创新改进研制而成的。是目前集气动控制技术、液压传动控制技术以及PLC可编程序控制器控制技术于一体的理想的综合性实验设备。实验时,它们可以相互辅成,交叉控制。可以让学生直观、感性地对比、了解气、电、液各自具有的特点、特色、及优缺点等。信号采集电路原理设计: (1) 前置放大电路要求有阻抗匹配设计(前置放大器采用集成运放OP07、 采用电压负反馈设计、增益为10、50两档手动设计) (2) 主放大器采用级联组合程控放大、增益动态范围为10至1500倍之内。 (增益程档位要求有30至40梯度之内,具体每档增益值不做具体要求 但要求梯度增益呈线性) (3) 主放大器末端输出值(Up-p)设计为5v,如有溢出则在设计说明中明。 (4) 调理电路中要有工频滤波器设计。 液压实验元件均为透明有机材料制成,透明直观。便于了解掌握几十种常用液压元件的结构、性能及用途。掌握几十种基本实验回路的工作过程及原理。实验时,组装实验回路快捷、方便。同时,配备独立的继电器控制单元进行电气控制,简单实用。通过和PLC比较,,可以加深对PLC可编程序控制器的了解及掌握。 本实验系统采用专用独立液压实验泵站,配直流电机无级调速系统,而且电机速度控制系统内部具有安全限速功能,可以对输出的最高速度进行限制。同时配有数字式高精度转速表,实时测量泵电机组的转速。并且配有油路压力调定功能,可以调定输出压力油的安全工作压力。泵站配有多路压力油输出及回油,可同时对多路液压回路进行供油回油。并采用闭锁式快速接头,以利于快速接通或封闭油路。实现油箱、油泵、直流
河南工业大学 现代控制理论实验报告姓名:朱建勇 班级:自动1306 学号:201323020601
现代控制理论 实验报告 专业: 自动化 班级: 自动1306 姓名: 朱建勇 学号: 201323020601 成绩评定: 一、实验题目: 线性系统状态空间表达式的建立以及线性变换 二、实验目的 1. 掌握线性定常系统的状态空间表达式。学会在MATLAB 中建立状态空间模型的方法。 2. 掌握传递函数与状态空间表达式之间相互转换的方法。学会用MATLAB 实现不同模型之 间的相互转换。 3. 熟悉系统的连接。学会用MATLAB 确定整个系统的状态空间表达式和传递函数。 4. 掌握状态空间表达式的相似变换。掌握将状态空间表达式转换为对角标准型、约当标准 型、能控标准型和能观测标准型的方法。学会用MATLAB 进行线性变换。 三、实验仪器 个人笔记本电脑 Matlab R2014a 软件 四、实验内容 1. 已知系统的传递函数 (a) ) 3()1(4)(2++=s s s s G
(b) 3486)(22++++=s s s s s G
(c) 6 1161)(232+++++=z z z z z z G (1)建立系统的TF 或ZPK 模型。 (2)将给定传递函数用函数ss( )转换为状态空间表达式。再将得到的状态空间表达式用函 数tf( )转换为传递函数,并与原传递函数进行比较。 (3)将给定传递函数用函数jordants( )转换为对角标准型或约当标准型。再将得到的对角 标准型或约当标准型用函数tf( )转换为传递函数,并与原传递函数进行比较。 (4)将给定传递函数用函数ctrlts( )转换为能控标准型和能观测标准型。再将得到的能控标 准型和能观测标准型用函数tf( )转换为传递函数,并与原传递函数进行比较。
嵌入式系统实验实验报告 一、实验目的 1.基本实验
. Word 资料搭建PXA270嵌入式LINUX开发软硬件环境;安装LINUX操 作系统;安装与配置建立宿主机端交叉编译调试开发环境;配置宿主机 PC 机端的minicom(或超级终端)、TFTP服务、NFS服务,使宿主PC机与PXA270开发板可以通过串口通讯,并开通TFTP 和NFS服务。 2.人机接口 键盘驱动;LCD控制;触摸屏数据采集与控制实验; 3.应用实验 完成VGA显示;Web服务器实验;网络文件传输实验;多线程应用实验。 4.扩展应用实验 完成USB摄像头驱动与视频采集;GPS实验;GSM/GPRS通讯;视频播放移植;USB蓝牙设备无线通讯;NFS文件服务器;蓝牙视频文件服务器。 5.QT实验 完成基本嵌入式图形开发环境搭建;“Hello world!”QT初探;创建一个窗口并添加按钮;对象通信:Signal和Slot;菜单和快捷键;工具条和状态栏;鼠标和键盘事件;对话框;QT的绘图;俄罗斯方块;基于QT的GSM手机在嵌入式LINUX下的设计与实现。 二、实验内容 1.人机接口实验 实验十九键盘驱动实验 ?实验目的:矩阵键盘驱动的编写
?实验内容:矩阵键盘驱动的编写 ?作业要求:完成键盘加减乘除运算 ?实验作业源码及注释: #INCLUDE
2011级专业综合实验报告 姓名: 班级: 学号: 专业: 指导老师: 时间: 组员:
目录 实验一日用化学品复配实验——洗衣用洗涤剂 (1) 实验二日用化学品复配实验——VE高级营养霜 (8) 实验三日用化学品复配实验——香波 (10) 实验四日用化学品复配实验——香水花露水 (12) 实验五果胶的提取与分析 (16) 实验六一种含N-P-Al阴离子配合物的制备及其对棉布的阻燃性 .. 20 实验七阿司匹林的合成 (23)
实验一日用化学品复配实验——洗衣用洗涤剂 一、实验目的 1、掌握洗涤剂的配方设计及检验方法。 2、掌握泡沫测定法。 二、实验概要 洗涤剂洗衣服一般最常用的是洗衣粉。洗衣粉的生产,一是要将液体原料(烷基苯磺酸钠、硅酸钠等)喷雾干燥成粉;二是固体原料(三聚磷酸钠、NaCO 3 )溶解成浆状再喷雾干燥成粉。而人们在使用时,洗衣粉又要溶解成水溶液才能进行洗涤。这样生产时耗用大量热能与工时,使用亦有不便。而液体洗涤剂制法简单,节能,使用方便,尤其在洗衣机中使用,更受重视。 洗衣用洗涤既要有较好的去污能力,又要在寒冷冬季和酷热的夏季都能保证透明,不分层、不混浊、不沉淀,并具有一定的粘度。因此虽然生产设备简单,但配方设计却不那么容易。配方中一般包含去污作用的表面活性剂,增加溶解度的增溶剂,适用硬水洗涤的螯合剂,同时还有缓冲剂,增粘剂、增泡剂等。 本实验就是洗涤剂配方设计选择并对其质量进行检测。 三、实验仪器和药品 吸滤瓶500ml 酚酞指示剂 古氏坩埚25—30ml 硝酸 乙醇95% 铬酸钾5% 无水乙醇AgNO 3 标准液0.1N PH试纸罗氏泡沫测定仪 量筒1000ml分液漏斗 无水CaCl 2 1000ml容量瓶 MgSO 4·7H 2 O NaOH 漂白布1张炭黑布4张 电动搅拌白度计QBDJ–1型电炉(500W)搪瓷盘
现代控制理论课程总结 学习心得 从经典控制论发展到现代控制论,是人类对控制技术认识上的一次飞跃。现代控制论是用状态空间方法表示,概念抽象,不易掌握。对于《现代控制理论》这门课程,在刚拿到课本的时候,没上张老师的课之前,咋一看,会认为开课的内容会是上学期学的控制理论基础的累赘或者简单的重复,更甚至我还以为是线性代数的复现呢!根本没有和现代控制论联系到一起。但后面随着老师讲课的风格的深入浅出,循循善诱,发现和自己想象的恰恰相反,张老师以她特有的讲课风格,精心准备的ppt 课件,向我们展示了现代控制理论发展过程,以及该掌握内容的方方面面,个人觉得,我们不仅掌握了现代控制理论的理论知识,更重要的是学会了掌握这门知识的严谨的逻辑思维和科学的学习方法,对以后学习其他知识及在工作上的需要大有裨益,总之学习了这门课让我受益匪浅。 由于我们学习这门课的课时不是很多,并结合我们学生学习的需求及所要掌握的课程深入程度,张老师根据我们教学安排需要,我们这学期学习的内容主要有:1.绪论;2.控制系统的状态表达式;3.控制系统状态表达式的解;4.线性系统的能空性和能观性;5.线性定常系统的综合。而状态变量和状态空间表达式、状态转移矩阵、系统的能控性与能观性以及线性定常系统的综合是本门课程的主要学习内容。当然学习的内容还包括老师根据多年教学经验及对该学科的研究的一些深入见解。 在现代科学技术飞速发展中,伴随着学科的高度分化和高度综合,各学科之间相互交叉、相互渗透,出现了横向科学。作为跨接于自然科学和社会科学的具有横向科学特点的现代控制理论已成为我国理工科大学高年级的必修课。 经典控制理论的特点 经典控制理论以拉氏变换为数学工具,以单输入-单输出的线性定常系统为主要的研究对象。将描述系统的微分方程或差分方程变换到复数域中,得到系统的传递函数,并以此作为基础在频率域中对系统进行分析和设计,确定控制器的结构和参数。通常是采用反馈控制,构成所谓闭环控制系统。经典控制理论具有明显的局限性,突出的是难以有效地应用于时变系统、多变量系统,也难以揭示系统更为深刻的特性。当把这种理论推广到更为复杂的系统时,经典控制理论就显得无能为力了,这是因为它的以下几个特点所决定。 1.经典控制理论只限于研究线性定常系统,即使对最简单的非线性系统也是无法处理的;这就从本质上忽略了系统结构的内在特性,也不能处理输入和输出皆大于1的系统。实际上,大多数工程对象都是多输入-多输出系统,尽管人们做了很多尝试,但是,用经典控制理论设计这类系统都没有得到满意的结果;2.经典控制理论采用试探法设计系统。即根据经验选用合适的、简单的、工程上易于实现的控制器,然后对系统进行分析,直至找到满意的结果为止。虽然这种设计方法具有实用等很多完整,从而促使现代控制理论的发展:对经典理论的精确化、数学化及理论化。优点,但是,在推理上却是不能令人满意的,效果也