? 2003-2009 MVTec Software GmbH
Distance Image Processing
disparity images to 3D coordinates
HALCON can convert
disparity images to 3D coordinates
Outlier Suppression: Median
Suppress areas that
n vary locally very much from the neighborhood and n are small
median_image(DistanceImage, FilteredImage, circle, 7, 'mirrored')
Maximum diameter
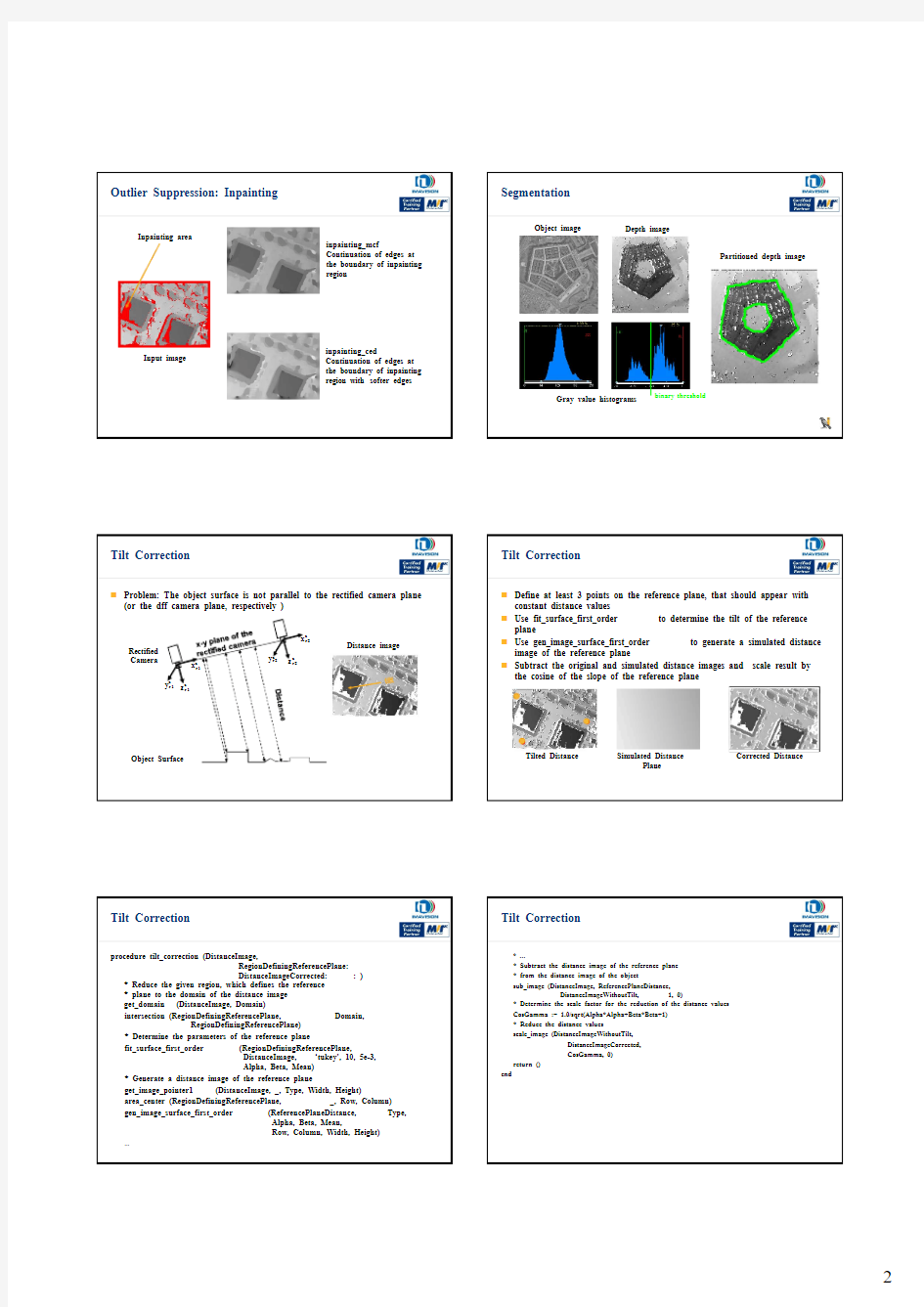
Outlier Suppression: Inpainting
n As an alternative to filtering so called inpainting can be used n The idea of inpainting is the following
n By a suitable segmentation the wrong height pixels are segmented n This can happen based on the
n confidence or
n outlying (extreme valued) regions
n For these regions new distance values are being calculated based on the distance values of the boundary of the regions
n The HALCON operators for inpainting are available with various behaviors
and can be selected depending on the application / object
Input image
Object image Depth image
Input image
Gray value histograms binary threshold
Define at least 3 points on the reference plane, that should appear with Problem: The object surface is not parallel to the rectified camera plane
Distance image
Tilted Distance
Simulated Distance
Corrected Distance
Plane
Original image with reference ROIs
Correction image
Corrected image
Segmented height levels
Height image DFF: Height Measurement
Note: Take care about the order in which the image sequence is taken For height measurement it is intuitive to start with the most distant
For many application not the height information for each single pixel is
Tool cut
Background Relevant (reconstructed)
part of the cut
Fitted plane
机器视觉软件HALCON 实验指导书 目录 实验1 HALCON 概述,应用范例 实验2 HDevelop介绍,操作编程范例 实验3 HALCON编程接口,高级语言编程 实验4 HALCON数据结构,采集硬件接口 实验5 HALCON采集硬件配置,图像采集 实验6 HALCON二维测量,配准测量与识别定位 实验7 HALCON一维测量,尺寸测量 实验8 HALCON三维测量,3D重建测量 实验1 HALCON 概述,应用范例 实验2 HDevelop介绍,操作编程范例 1 邮票分割 文件名: stamps.dev 第一个例子进行文件分析任务。图5.1展示了部分邮票目录页。它描述了两种不同的邮票:以图形描述为主和以文字描述为主。 为了使用这个例子,必须把文字描述转化为计算机所能理解的形式。你可能使用OCR编程方式,你很快发现由于邮票的图形描述会导致大多数的可使用模块产生错误。于是另一项任务必须要进行预处理:对所有的邮票进行转化(例如,把邮票转化为灰色有价值的纸),这样就可以使用OCR处
理邮票的剩余部分了。 当创造一个应用程序来解决这种问题,对要处理的对象进行特征提取是非常有帮助的。这个任务可以为新手提供解决的这类问题一些的经验。 ●一般而言,特征提取有如下步骤:邮票比纸要黑。 ●邮票包含图像的部分不重叠。 ●邮票具有最大最小尺寸。 ●邮票是长方形的。
图 5.1: Mi c he l图表的部分页. 如果直接使用属性清单而非编程,任务会变得很简单。可惜由于语言的含糊,这是不可能的。所以你需要建构具有精确的语法和语义的语言,尽可能接近非正式的描述。使用HDevelop语法,一个通常的程序看起来如下: dev_close_window () read_image (Catalog, ’swiss1.tiff’) get_image_pointer1 (Catalog, Pointer, Type, Width, Height) dev_open_window (0, 0,Width/2, Height/2, ’black’, WindowID) dev_set_part (0, 0,Height-1, Width-1) dev_set_draw (’fill’)
机器视觉算法开发软件----HALCON HALCON是世界范围内广泛使用的机器视觉软件,用户可以利用其开放式结构快速开发图像处理和机器视觉软件。 HALCON提供交互式的编程环境HDevelop。可在Windows,Linux,Unix下使用,使用HDevelop可使用户快速有效的解决图像处理问题。HDevelop含有多个对话框工具,实时交互检查图像的性质,比如灰度直方图,区域特征直方图,放大缩小等,并能用颜色标识动态显示任意特征阈值分割的效果,快速准确的为程序找到合适的参数设置。HDevelop程序提供进程,语法检查,建议参数值设置,可在任意位置开始或结束,动态跟踪所有控制变量和图标变量,以便查看每一步的处理效果。当用户对于机器视觉编程代码完成后,HDevelop可将此部分代码直接转化为C++,C或VB源代码,以方便将其集成到应用系统中。 HALCON提供交互式的模板描述文件生成工具HmatchIt,。可交互式地为一个模型定义一个任意形状的感性趣区域,HmatchIt优化给出此创建模型的合适参数, 自动生成模板描述文件以供程序调用,快速为基于形状匹配和结构匹配的用户找到实现目标识别和匹配应用的合适的参数设置。 HALCON提供支持多CPU处理器的交互式并行编程环境Paralell Develop, 其继承了单处理器板HDevelop的所有特点,在多处理器计算机上会自动将数据比如图像分配给多个线程,每一个线程对应一个处理器,用户无需改动已有的HALCON程序,就立即获得显
著的速度提升。 HALCON中HDevelop Demo中包含680个应用案例,根据不同的工业领域,不同的用法和算法分类列出,用户可以根据自己的需求方便的找到相对应的类似案例,快速掌握其函数用法。 HALCON提供的函数使用说明文档,详细介绍每个函数的功能和参数用法,提供在不用开发语言(VC,VB,.NET等)下的开发手册,而且提供一些算法(例如3D)的原理性介绍,给用户的学习提供帮助。 特点:原型化的开发平台,自动语法检查; 动态察看控制和图标变量; 支持多种操作系统; 支持多CPU; 支持多种文件格式; 自动语言转化功能; 与硬件无关,可支持各种硬件; 应用领域:医学图像分析; 2D/3D测量; 立体视觉; 匹配定位; 光学字符识别; Blob分析;
Halcon机器视觉二维码实例及分步注解 [plain]view plaincopy 1.*2D Code generated by Image Acquisition01 2.*QR Code 3.dev_close_window() 4.dev_open_window(0,0,400,400,'black',WindowHandle) 5.*先关闭活动图形窗口,再打开这个窗口,标识符为WindowHandle; 6.*相对于界面左上角第0行、第0列,大小为400×400像素,颜色为黑色。 7.open_framegrabber('DirectShow',1,1,0,0,0,0,'default',8,'rgb',-1,'false','defa ult','Gsou USB2.0Camera',0,-1,AcqHandle) 8.*打开帧接收器(图像采集设备,如摄像头,工业相机等),参数(Parameter)详见这个算子 9.*注意摄像头的名称,可以用工具栏中的“助手”——打开新的Image Acquisition获取摄像头及插入代码 10.grab_image_start(AcqHandle,-1) 11.while(true) 12.grab_image_async(Image,AcqHandle,-1) 13.create_data_code_2d_model('QR Code',[],[],DataCodeHandle) 14.*二维码的创建开头的算子,clear为结束清除的算子,见下。 15.set_display_font(WindowHandle,16,'mono','true','false') 16.dev_set_color('forest green') 17.dev_set_draw('margin') 18.dev_set_line_width(3) 19.set_data_code_2d_param(DataCodeHandle,'default_parameters','enhanced_recognition') 20.*设置选定参数的二维数据模型,参数详见这个算子 21.find_data_code_2d(Image,SymbolXLDs,DataCodeHandle,[],[],ResultHandles,DecodedDa taStrings) 22.*检测和读取二维代码符号,也支持读取二维数据模型的序列,参数详见这个算子 23.for i:=0to|ResultHandles|-1by1 24.select_obj(SymbolXLDs,SymbolXLD,i+1) 25.get_contour_xld(SymbolXLD,Row,Col) 26.get_string_extents(WindowHandle,DecodedDataStrings[i],Ascent,Descent,TxtWidth ,TxtHeight) 27.disp_message(WindowHandle,DecodedDataStrings[i],'image',max(Row-50),max([min( Col+30)-TxtWidth/2,1]),'black','true') 28.endfor 29.*这段for循环语句的目的是让解码到的字符串(二维码的内容)显示到二维码深绿色(forest green上 面定义)的解码区域框的行列位置。 30.*disp_message(WindowHandle,DecodedDataStrings,'window',12,12,'black','true') 31.*如果不需要设置显示到区域框中间的位置,而是显示到窗体的上方或其他位置,那么不需要上面那段for 语句,只需这段信息显示的语句即可显示到窗体相应位置。 32.if(|DecodedDataStrings|>0) 33.disp_continue_message(WindowHandle,'black','true')
跟我学机器视觉-HALCON学习例程中文详解-QQ摄像头读取条码 第一步:插入QQ摄像头,安装好驱动(有的可能免驱动) 第二步:打开HDevelop,点击助手—打开新的Image Acquisition—选中图像获取接口(I),然后点击检测,找到摄像头。如下图: 第三步:点击连接,将颜色空间设置为gray,然后点击实时,此时图像窗口中将显示采集到的图像,将物体放置到摄像头前,位置调至条码清晰。如下图:
集,点击插入代码,此时程序编辑器中将自动生成代码,如下图:
这时单击下运行按钮,将会采集一副图像并显示到图形窗口中。接下来我们将开始条码读取的工作。 第五步:在Do Something后插入如下代码: create_bar_code_model ([ ], [ ], BarCodeHandle) *由于不知道条码是何类型,因此条码类型设置为auto。CodeTypes := ['auto'] find_bar_code (Image, SymbolRegions, BarCodeHandle, CodeTypes, DecodedDataStrings) get_bar_code_result (BarCodeHandle, 'all', 'decoded_types', DecodedDataTypes) 这时再重新运行程序,只要图像清晰,此时就可以读到条码了。条码区域会变成红色,而且在变量窗口中可以查到读取的条码类型和内容。如下图:
第六步:我们再添加代码,将读取结果直接显示在图像窗口中。 disp_message (WindowHandle, DecodedDataTypes[0]+': '+DecodedDataStrings[0], 'image', 100, 160, 'forest green', 'true') 此时会提示错误WindowHandle未被初始化。 *获取更多课程请Q智达工控学院:1613985351 因为图像采集助手会自动打开一个窗口,因此我们先将它关闭,然后自己创建一个窗口。在程序最开始加上这两句代码: dev_close_window () dev_open_window (0, 0, 512, 512, 'black', WindowHandle) 再重新运行程序,此时在读取到的条码在图像中写出来了。如下图:
封面
作者:PanHongliang 仅供个人学习 基于HALCON的机器视觉系统的研究与实现 摘要 近年来,机器视觉系统以其高效率、高可靠、低成本的特点在国外取得了广泛的应用。机器视觉系统适用于众多领域,例如工业自动化、医药业、制造业、农业等,弥补了人类视觉的很多不足。本文采用德国MVTec公司的专业机器视觉软件HALCON来开发机器视觉系统,提出了相关机器视觉实现方法,
并且在机器视觉实验平台上完成了一个弹簧片检测任务。 目前关注较多的是机器视觉系统的硬件部分,而机器视觉软件部分关注较少,一个先进的机器视觉系统除了具有高性能的硬件外,还需要有高性能的软件,虽然说许多常见的开发软件例如Mircosoft的Visual Studio、NI的LabWindows\CVI等等都可以开发机器视觉系统,但是开发周期比较长,针对性较弱,程序的复杂程度较高。而采用HALCON作为机器视觉和图像处理核心软件,不仅大大缩短了开发周期,降低了开发难度,而且可以参考HALCON 提供的众多机器视觉和图像处理例程来针对具体的任务做具体开发。 文章的第一章研究了机器视觉系统的组成、应用现状和发展,并且对机器视觉软件HALCON做了概述。第二章根据相关要求,选择合适的硬件单元,设计和搭建了VS-ZM1200机器视觉实验平台。第三章研究了机器视觉中常用的一些图像处理技术,重点讨论了在弹簧片检测任务中所采用的图像处理技术和算法,如图像的增强,分割,边缘检测等。第四章研究了机器视觉软件,重点研究了HALCON,并且对在Visual C++开发环境下如何使用HALCON编写的程序做了讨论。第五章介绍了在VS-ZM1200机器视觉实验平台上,使用HALCON和Visual C++开发的一套弹簧片检测系统,该系统完成关于弹簧片的尺寸参数测量和外观参数判别的任务。 第一章:绪论 1.1机器视觉概述 人类在征服自然、改造自然和推动社会进步的过程中,为了克服自身能力、能量的局限性,发明和创造了许多机器来辅助或代替人类完成任务。这类机器,我们通常称为智能机器,它能模拟人类的功能,能感知外部世界并有效地解决人所希望解决的问题。人类感知外部世界主要是通过视觉、触觉、听觉和嗅觉等感觉器官,而视觉,是人类最重要的感觉功能。视,就是看。觉,就是感觉、感知。通过看来感知外部世界丰富多采的信息。“百闻不如一见”,这句话生动地说明了视觉对获得客观世界信息的重要性。据统计,人所感知的外界信息有80%以上是由视觉得到的[1],通过视觉,我们可以感受到物体的位置,亮度以及物体之间的相互关系等。因此,对于智能机器来说,赋予机器人类的视觉功能对发展智能机器是极其重要的,由此形成了 一门新的学科———机器视觉。 机器视觉,就是用机器(通常是数字计算机)代替人眼来做测量及判断,对图像进行自动处理并报告“图像中有什么”的过程。美国制造工程师协会(SME Society of Manufacturing Engineers)机器视觉分会和美国机器人工业协会(RIA Robotic Industries Association)的自动化视觉分会对机器视觉下的定义为:“机器视觉是通过光学的装置和非接触的传感器自动地接收和处理一个真实物体的图像,以获得所需信息或用于控制机器人运动的装置”。具体来讲,是指通过镜头将被测目标转化为图像信号,投射至影像接受器件(一般为 CCD 元件)上再通过数字计算机进行分析处理。CCD是英文(Charge Coupling Device)的缩写,其中文含义为电荷耦合组件。当不同强度的光线照射在CCD表面,CCD
? 2003-2009 MVTec Software GmbH Descriptor-based Matching Choose between calibrated and uncalibrated matching uncalibrated returns perspective map calibrated returns pose Descriptor-based matching is done in four steps 1. Train interest points 2. Detect points 3. Match points Offline Online 4. Calculate map offline online First, create a descriptor model Create model Find model Clear model 1. detect points To create a model, choose a point detector and a point descriptor 2. describe points
create_[un]calib_descriptor_model create_calib_descriptor_model(?Image::?CamParam, ?ReferencePose, ?DetectorType, ?DetectorParamName,?DetectorParamValue,?DescriptorParamName,?DescriptorParamValue,?Seed, ?DescriptorHandle) 1. detector parameters 2. descriptor parameters 1. detect points for descriptor-based matching points_harris points_harris_binomial points_lepetit fast robust Points are described by randomized ferns 2. describe points Ferns compare random pixels to learn interest point descriptions After the training, every fern contains probability distributions at every leaf 1
基于HALCON的机器视觉系统的研究与实现 近年来,机器视觉系统以其高效率、高可靠、低成本的特点在国外取得了广泛的应用。机器视觉系统适用于众多领域,例如工业自动化、医药业、制造业、农业等,弥补了人类视觉的很多不足。本文采用德国MVTec公司的专业机器视觉软件HALCON来开发机器视觉系统,提出了相关机器视觉实现方法,并且在机器视觉实验平台上完成了一个弹簧片检测任务。 目前关注较多的是机器视觉系统的硬件部分,而机器视觉软件部分关注较少,一个先进的机器视觉系统除了具有高性能的硬件外,还需要有高性能的软件,虽然说许多常见的开发软件例如Mircosoft的Visual Studio、NI的LabWindows\CVI等等都可以开发机器视觉系统,但是开发周期比较长,针对性较弱,程序的复杂程度较高。而采用HALCON作为机器视觉和图像处理核心软件,不仅大大缩短了开发周期,降低了开发难度,而且可以参考HALCON提供的众多机器视觉和图像处理例程来针对具体的任务做具体开发。 文章的第一章研究了机器视觉系统的组成、应用现状和发展,并且对机器视觉软件HALCON做了概述。第二章根据相关要求,选择合适的硬件单元,设计和搭建了VS-ZM1200机器视觉实验平台。第三章研究了机器视觉中常用的一些图像处理技术,重点讨论了在弹簧片检测任务中所采用的图像处理技术和算法,如图像的增强,分割,边缘检测等。第四章研究了机器视觉软件,重点研究了HALCON,并且对在Visual C++开发环境下如何使用HALCON编写的程序做了讨论。第五章介绍了在VS-ZM1200机器视觉实验平台上,使用HALCON和Visual C++开发的一套弹簧片检测系统,该系统完成关于弹簧片的尺寸参数测量和外观参数判别的任务。
2019.01科技论坛 HALCON 图像处理在机器视觉中的应用 耿立明,杨威,王迪 (沈阳城市建设学院信息与控制工程系,辽宁沈阳,110167 ) 摘要:本文针对柔性智能制造生产线为控制对象进行研究,分析柔性智造生产线的组成,搭配思科工业交换机和发那科 LR Mate200I d 型六自由度工业机器人,完成复杂的产品智能制造和组装加工过程,采用康耐视工业相机C C D 图像传感 器构成机器视觉系统,基于HALCON基类H X L D 算法进行图像处理、特征提取,应用在机器视觉中进行产品的在线检测,发现产品的缺陷,并及时加以处理,防止不必要的损失。 关键词:生产线;机器视觉;HALCON ; HXLD ;检测;智能制造 Application of machine vision based on HALCON image processing Geng Liming, Yang W e i , Wang Di (Shenyang Urban Construction University Department of information and control engineering, Shenyang Liaoning, 110167) Abstract: This paper studies the flexible intelligent manufacturing production line for the control object, analyzes the composition of the flexible intelligent production line, and cooperates with Cisco Industrial Switch and FANUC LR Mate200Id six-degree-of-freedom industrial robot to complete the complex product intelligent manufacturing and assembly process. CCD image sensor of Vision Industrial Camera constitutes machine vision system. Based on HALCON based HXLD algorithm for image processing and feature extraction, it is applied in machine vision for on-line detection of products, and discovers defects of products and processes them in time to prevent unnecessary loss. Key words : Production line; machine vision; HALCON; HXLD; inspection; intelligent manufacturing 0引言 如图1所示。柔性智能制造生产线由自动供料单元、物 料转运机构、模拟加工单元、工件组装单元、产品分拣单元、 产品搬运机构及立体仓库单元组成。设备整体为桌面台式模 块化设计,可形成各单元独立控制和整体流程控制。本设计 研宄对象以智能制造生产线作为技术根本,搭配思科工业交 换机和发那科LR Mate200I d 型六自由度工业机器人,完成复 杂的产品智能制造和组装加工过程。图1柔性智能制造生产线鉴于在生产线上人眼无法连续、稳定地完成完成这些 带有高度重复性和智能性的工作。由此考虑机器视觉判别方 法:利用光电成像系统采集被控目标的图像,然后经图像处 理模块进行数字化处理,根据图像的像素分布、亮度和颜色 等信息,来进行尺寸、形状、颜色等的判别。1机器视觉判别1.1机器视觉系统的构成 机器视觉系统可以实现非接触测量,从而提高了系统的 可靠性。 机器视觉技术用计算机来分析一个图像,并根据分析 得出结论。机器视觉系统可以探测部件,也可以用来创造一 个部件,即运用复杂光学器件和软件相结合直接指导制造过 程。典型的视觉系统一般包括:光源、光学系统,相机、图像处 理单元、图像分析处理软件、通讯/输入输出单元等。尽管机 器视觉应用各异,但都包括以下几个过程。 (1)图像采集 光学系统采集图像,图像转换成模拟格式并传入计算机 存储器。一般利用光源、光学系统,相机、图像处理单元获取 被测物体的图像。本设计相机选择康耐视工业相机C C D 图像 传感器300万像素。 基金项目:校科学研宄发展基金项目“机器视觉在工业机器人智能分拣识别中的应用研宄” (XKJ2018003)。
通过这几天在网上查找资料,了解了一些机器视觉的软件。主要有以下几个: 1.Vision Pro VisionPro提供多种开发工具——拖放式界面、简单指令码和编程方式等,全面支持所有模式的开发。用户利用VisionPro QuickBuild?可以配置读取、选择并优化视觉工具,决定产品是否合格……所有这些都无需编程即可实现。用户也可以利用C++、C#、VB及.NET 开发管理应用程序。Vision Pro提供的.NET程序接口允许用户采用面向对象的高级语言编程访问所有工具,以高效开发客户的专用视觉方案。QuickBuild可以轻松实现任务的加载和执行,也可以选择手动配置代码工具。 但是这个康耐视软件更偏向于实际工业生产中的应用。取用其中的函数代码可能不太方便。 2 . LabVIEW LabVIEW是一种程序开发环境,类似于C和BASIC开发环境,但是LabVIEW与其他计算机语言的显著区别是:其他计算机语言都是采用基于文本的语言产生代码,而LabVIEW 使用的是图形化编辑语言G编写程序,产生的程序是框图的形式。LabVIEW软件是NI设计平台的核心,也是开发测量或控制系统的理想选择。LabVIEW开发环境集成了工程师和科学家快速构建各种应用所需的所有工具,旨在帮助工程师和科学家解决问题、提高生产力和不断创新。LabVIEW机器视觉基础参考链接: https://www.doczj.com/doc/da1812719.html,/link?url=ycqKQ3WmwpDChuli1iZoroVKooAOnJidf5aFFehiajoqXLQ61 j4zFNRPhizef1UPbL7DDcrDR9TwEc4vzB8WtHVXr7yx6ygOMGuUPbkcway 这个软件需要重新学习用法,是一种编写程序的方法,图形编程可能不能直接应用在我们的试验中,但是有一定的参考价值。 3.HALCON HALCON是一套完善的标准的机器视觉算法包,拥有应用广泛的机器视觉集成开发环境。它节约了产品成本,缩短了软件开发周期——HALCON灵活的架构便于机器视觉和图像分析应用的快速开发。HALCON源自学术界,它有别于市面一般的商用软件包。事实上,这是一套image processing library,由一千多个各自独立的函数,以及底层的数据管理核心构成。其中包含了各类滤波,色彩以及几何,数学转换,型态学计算分析,校正,分类辨识,形状搜寻等等基本的几何以及影像计算功能,由于这些功能大多并非针对特定工作设计的,因此只要用得到图像处理的地方,就可以用HALCON强大的计算,,分析能力来完成工作。HALCON支持Windows,Linux和Mac OS X操作环境,它保证了投资的有效性。整个函数库可以用C,C++,C#,Visual basic和Delphi等多种普通编程语言访问。HALCON为大量的图像获取设备提供接口,保证了硬件的独立性。 HALCON在试验中有自己的优点:1.为了让使用者能在最短的时间里开发出视觉系统,HALCON包含了一套交互式的程序设计界面HDevelop,可在其中以HALCON程序代码直接撰写,修改,执行程序,并且可以查看计算过程中的所有变量,设计完成后,可以直接输出C、C++、VB、C#、vb等程序代码,套入程序中。HDevelop同时和数百个范例程序链接,除了个别计算功能的说明,还可以随时依据不同的类别找到应用的范例,方便参考。 2.使用HALOCN,在设计人机接口时没有特别的限制,也不必特别的可视化组件,可以完全使用开发环境下的程序语言,例如visual studio、.NET、Mono等等,架构自己的接口,end user看不到开发工具,而且在执行作业的机器上,只需要很小的资源套件。 4.OPENCV OpenCV是一个基于(开源)发行的跨平台计算机视觉库,可以运行在Linux、Windows
halcon学习笔记——机器视觉工程应用的开发思路 机器视觉工程应用主要可划分为硬件和软件两大部分。 硬件:工程应用的第一步就是硬件选型。硬件选型很关键,因为它是你后面工作的基础。主要是光源、工业相机和镜头选择。 软件:目前业内商业库主要有Halcon,康耐视,DALSA,evision,NI等,开源库有Ope nCV.其中NI的labview+vision模块。 机器视觉工程应用的基本开发思路是: 一、图像采集,二、图像分割,三、形态学处理,四、特征提取,五、输出结果。 下面在Halcon下对这四个步骤进行讲解。 一、图像采集: Halcon通过imageacquisition interfaces对各种图像采集卡及各种工业相机进行支持。其中包括:模拟视频信号,数字视频信号Camera Link,数字视频信号IEEE 1394,数字视频信号USB2.0,数字视频信号Gigabit Ethernet等。 Halcon通过统一的接口封装上述不同相机的image acquisition interfaces,从而达到算子统一化。不同的相机只需更改几个参数就可变更使用。 Halcon图像获取的思路:1、打开设备,获得该设备的句柄。2、调用采集算子,获取图像。
1、打开设备,获得该设备的句柄。
2、调用采集算子,获取图像。 图像采集其他相关算子: grab_image_start,该算子开始命令相机进行异步采集。只能与grab_image_async (异步采集)一起使用。
例子: 3、相机参数读写 读取相机参数: info_framegrabber( : : Name, Query : Information, ValueList) 写相机参数: set_framegrabber_param( : : AcqHandle, Param, Value : ) 二、图像分割: 图像分割的定义: 所谓图像分割是指将图像中具有特殊含义的不同区域分割开来,这些区域是互相不交叉的,每个区域都满足特定区域的一致性。 1、基于阈值的图像分割 threshold —采用全局阈值分割图像。 格式:threshold(Image : Region : MinGray, MaxGray : )