控制点平差报告§1 项目信息
§1.1 项目属性
§1.2 坐标系统
坐标系名称:昆明-87
椭球长半轴 a:6378245.000000 椭球扁率 f:1/298.300000
投影名称:高斯投影
尺度:1.000000 投影高:0.000000
X加常数:0.000000 Y加常数:500000.000000
中央纬度:0 中央子午线:102
§2 WGS-84三维无约束平差
§2.1 平差参数
参考因子:1.00
χ平方检验(α=95%):通过
自由度:15
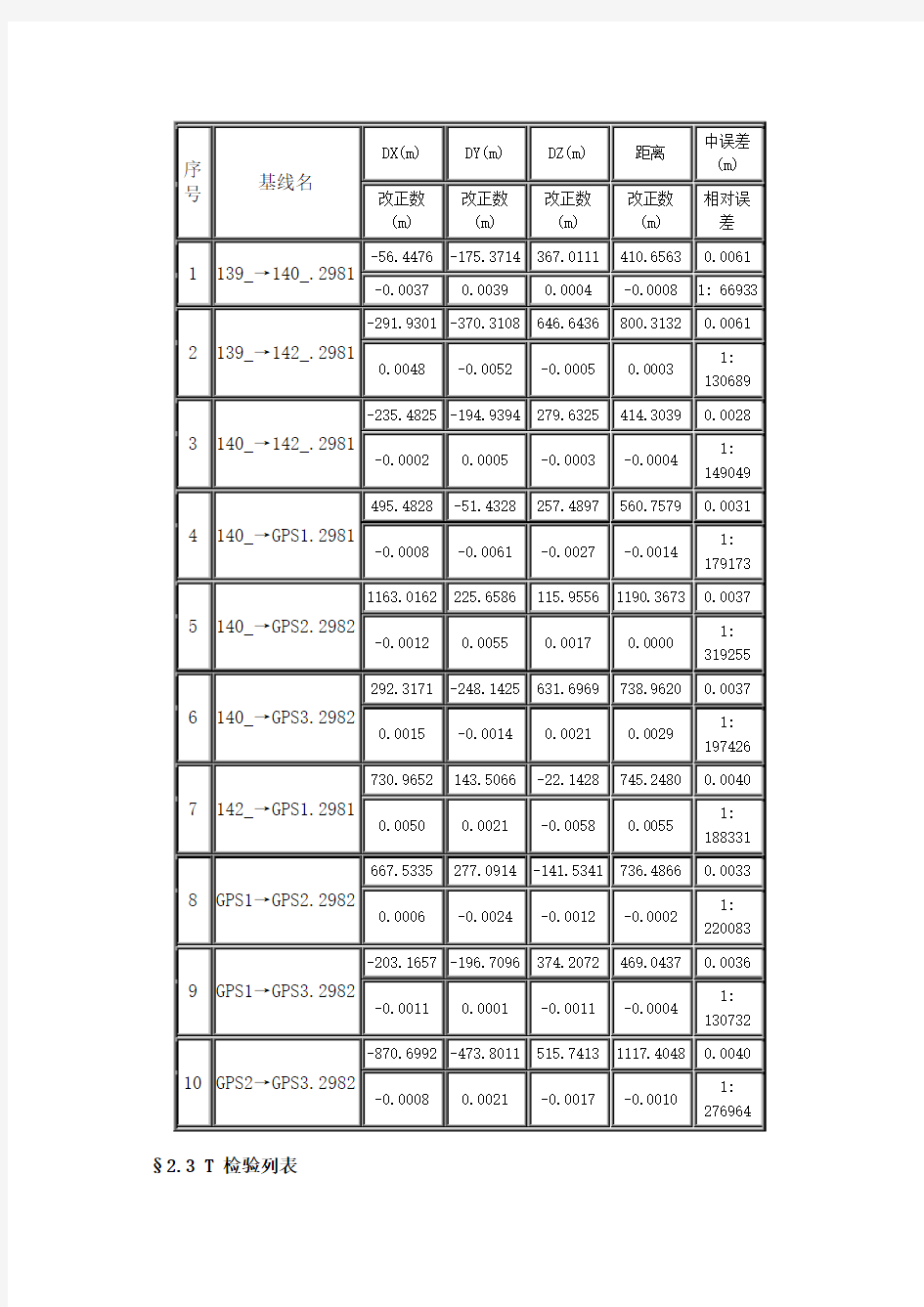
§2.2 平差基线边
§2.3 T 检验列表
§2.4 自由网平差坐标
§3 二维平差
§3.1 平差参数
迭代次数:2
网的参考因子: 0.9993
x向平移: -198939.6390米y向平移: 315101.0813米比例: 147.7487ppm 旋转: 379.1296秒
§3.2 平面距离平差值
基线最弱边相对中误差
§3.3 平面坐标
最弱点平面中误差
§4 高程拟合
§4.1 平差参数
迭代次数:2
网的参考因子: 20.5801 参考点:139_
H = H0 + A
A = 32.8428
§4.2 拟合坐标
§5 平差总结
§5.1 最终平面距离平差值
基线最弱边相对中误差
§5.2 最终坐标平差值
最弱点平面中误差
控制点坐标成果表
控制网平差报告 [控制网概况] 计算软件:南方平差易2005 网名:成都学院1-6教导线网 计算日期:2014-07-02 观测人:赵磊 记录人:薛佳丽 计算者:薛佳丽 检查者: 测量单位:成都学院测绘工程一班 备注:第六小组 平面控制网等级:国家四等,验前单位权中误差:2.50(s) 已知坐标点个数:2 未知坐标点个数:8 未知边数:9 最大点位误差[D] = 0.0118 (m) 最小点位误差[B] = 0.0068 (m) 平均点位误差= 0.0109 (m) 最大点间误差=0.0102(m) 最大边长比例误差= 53 平面网验后单位权中误差=1.88(s) [边长统计]总边长:1211.146(m),平均边长:134.572(m),最小边长:51.705(m),最大边长:262.760(m) [闭合差统计报告]
高程网平差 -------------------------------------------------------------------- APPROXIMATE HEIGHT -------------------------------------------------------------------- No. Name Height(m) -------------------------------------------------------------------- 1 A1 500.0000 2 A2 499.6860 3 A3 499.3690 4 A4 499.2295 5 B1 497.9570 6 B2 497.1505 7 C1 495.7295 8 C2 495.0625 9 D1 495.5515 10 D2 494.9110 11 E1 494.5825
FJ-3 省道S229南坑至源头段 二级公路改建工程 GPS静态控制测量网平差报告 萍乡公路勘察设计院 二○一一年九月 目录 一、GPS控制点成果表 (1) 二、GPS控制点网示意图 (1) 三、GPS控制网平差报告……………………………………1~4
一、G PS控制点成果表 二、GPS控制点网示意图 三、GPS控制网平差报告 1 坐标系统 1.1 坐标系统名称 Beijing54 1.2 基准参数
1.3 投影参数 M0 =1.00000000 投影比率 H = 0.0000 投影高 Bm =0投影面的平均纬度 B0 =0:00:00.00N 原点纬度 L0 =113:50:00.00E 中央子午线 N0 =0.0000 北向加常数 E0 =500000.0000 东向加常数 回到顶部 2 三维无约束平差2.1 平差参数 2.2 基线向量及改正数 2.3 τ(Tau)检验表 2.4 τ(Tau)检验直方图
2.5 自由网平差坐标 回到顶部 3 二维约束平差 3.1 平差参数 3.2 平面距离平差值 3.3 平面坐标 ***** 回到顶部
4 高程拟合 4.1 平差参数 4.2 高程拟合坐标 240.7246 回到顶部 5 基线闭合差 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G1->G2.242A 99.9 0.0077 -1046.7333 -648.5635 534.7004 1342.4566 G1->G3.242A 99.9 0.0068 -3110.1745 -2426.1123 1829.3052 4348.0529 G2->G3.242A 99.9 0.0062 -2063.4456 -1777.5444 1294.6074 3015.5398 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.76ppm EX = 0.0043 EY = -0.0043 EZ = -0.0026 8706.0493 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G1->G4.242B 65.6 0.0072 -5107.6816 -3742.5441 2584.4937 6839.1999 G1->G2.242A 99.9 0.0077 -1046.7333 -648.5635 534.7004 1342.4566 G2->G4.242B 99.9 0.0072 -4060.9524 -3093.9755 2049.7944 5501.4248 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.48ppm EX = -0.0041 EY = 0.0051 EZ = 0.0010 13683.0814 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G1->GD1.242X 99.9 0.0087 507.9850 -1545.3781 3267.2106 3649.7818 G1->G2.242A 99.9 0.0077 -1046.7333 -648.5635 534.7004 1342.4566 G2->GD1.242X 99.9 0.0065 1554.7134 -896.8104 2732.5118 3269.2543 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.80ppm EX = -0.0048 EY = 0.0042 EZ = 0.0017 8261.4927 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G3->G4.242B 99.9 0.0063 -1997.5067 -1316.4322 755.1870 2508.6519 G1->G3.242A 99.9 0.0068 -3110.1745 -2426.1123 1829.3052 4348.0529 G1->G4.242B 65.6 0.0072 -5107.6816 -3742.5441 2584.4937 6839.1999 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.12ppm EX = -0.0003 EY = 0.0004 EZ = 0.0015 13695.9047 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G3->GD1.242X 99.9 0.0071 3618.1569 880.7382 1437.9069 3991.7835 G1->G3.242A 99.9 0.0068 -3110.1745 -2426.1123 1829.3052 4348.0529 G1->GD1.242X 99.9 0.0087 507.9850 -1545.3781 3267.2106 3649.7818 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.42ppm EX = 0.0026 EY = -0.0040 EZ = -0.0015 11989.6182 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G4->GD1.242X 99.9 0.0073 5615.6650 2197.1667 682.7190 6068.7182 G1->G4.242B 65.6 0.0072 -5107.6816 -3742.5441 2584.4937 6839.1999 G1->GD1.242X 99.9 0.0087 507.9850 -1545.3781 3267.2106 3649.7818 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.16ppm EX = 0.0015 EY = -0.0007 EZ = -0.0022 16557.6999
- - - n 目录 一、目录----------------------------1 二、序言---------------------------- 2 三、设计思路------------------------ 3 四、程序流程图---------------------- 4 五、程序及说明---------------------- 5 六、计算结果-----------------------12 七、总结--------------------------- 15 第二部分序言 1、课程设计的性质、目的和任务 误差理论与测量平差是一门理论与实践并重的课程,其课程设计是测量数据处理理论学习的一个重要的实践环节,它是在我们学习了专业基础课“误差理论与测量平差基础”课程后进行的一门实践课程。其目的是增强我们对误差理论与测量平差基础理论的理解,牢固掌握测量平差的基本原理和基本公式,熟悉测量数据处理的基本技能和计算方法,灵活准确地应用于解决各类数据处理的实际问题,并能用所学的计算机理论知识,编制简单的计算程序。 2、误差理论与测量平差课程和其它课程的联系和分工 这次课程设计中所用的数学模型和计算方法是我们在误差理论与测量平差课程中所学的内容,所使用的C程序语言使我们在计算机基础课程中所学知识。误差理论与测量平差课程设计是测量平差和计算机程序设计等课程的综合实践与应用,同时也为我们今后步入工作岗位打下了一定基础。 3、课程设计重点及内容 本次课程设计重点是培养我们正确应用公式、综合分析和解决问题的能力,以及计算机编程能力。另外它要求我们完成1-2个综合性的结合生产实践的题目。如目前生产实践中经常用到的水准网严密平差及精度评定,边角网(导线)严密平差及精度评定等。此次我所选的课程设计课题是水准网严密平差及精度评定,其具体内容如下: 根据题目要求,正确应用平差模型列出观测值条件方程、误差方程和法方程;解算法方程,得出平差后的平差值及各待定点的高程平差值;评定各平差值的精度和各高程平差值的精度。 具体算例为: 如图所示水准网,有2个已知点,3个未知点,7个测段。各已知数据及观测值见下表(1)已知点高程H1=5.016m ,H2=6.016m (2)高差观测值(m)
近似坐标计算的函数-calcux0y0函数(126页) function [x0,y0]=calcux0y0(x0,y0,e,d,sid,g,f,dir,s,t,az,pn,xyknow,xyunknow,point,aa,bb,cc) %本函数的作用是计算待定点的近似坐标 format short; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% time=0;prelength=length(xyknow);non_orient=0;point_angle=0; while length(xyunknow)>0 %考虑的计算方法有:1.极坐标;2.前方交会;3.测边交会;4.后方交会; %5.无定向导线的两种情况:(1)已知两个点;(2)分离的已知点与方位角;基本思路:%采用循环的方法逐一对每一个未知点进行以上各种方法条件的搜索,满足后即解算。 aa0=[];bb0=[];cc0=[];%记录搜索到两条观测边但需用户给顺序的点,注意要放在while 里面。 time=time+1; % 用于统计循环次数。 way=0; for i=xyunknow %依次循环向量中的各元素 %============================================================= ===== %方法1.极坐标条件搜索与计算-->way=1,基本思路:找到或求出一个方位角,找出一条边。 temp1=[]; temp2=[]; temp3=[]; temp4=[]; temp5=[]; temp6=[]; temp7=[]; temp8=[]; temp9=[]; temp10=[];A=[];B=[];P=[]; %第一步:寻找观测条件:两种情况:一是有已知方位角;二是由两个已知点及方向观测值推出方位角。 temp7=find(t==i); if length(temp7)>0 temp8=find(xyknow==s(temp7(1))); if length(temp8)>0 temp9=find(e==s(temp7(1))&d==t(temp7(1))|e==t(temp7(1))&d==s(temp7(1))); if length(temp9)>0 %第一种情况:有已知方位角(一般适用于闭合导线) S=mean(sid(temp9)); Alfa0=az(temp7(1)); x0(i)=x0(s(temp7(1)))+S*cos(Alfa0); y0(i)=y0(s(temp7(1)))+S*sin(Alfa0); way=1;method(i)=11;%----->由已知方位角算出 end end else temp1=find(f==i);%第二种情况:由两个已知点及方向观测值推出方位角(适用于附合、支导线) if length(temp1)>0 for j=xyknow
西南林业大学 《全球卫星定位系统原理》GPS控制网平差实习 (2012级) 题目静态GPS控制网平差总结报告 学院土木工程学院 专业测绘工程 学号20120456023 学生姓名施向文 任课教师朱毅 西南林业大学土木工程学院测绘工程系 2015年07月 12 日
目录 1 实习目的 0 2 实习任务 0 3 数据处理依据 0 4 精度要求 0 5 已有成果数据 0 6 数据处理过程 (1) 6.1创建作业及数据导入 (1) 6.2基线预处理 (1) 6.2.1静态基线处理设置 (1) 6.2.2处理基线 (2) 6.2.3搜索闭合环 (2) 6.3设置坐标系 (2) 6.4网平差 (2) 6.5高程内外符合精度检验 (3) 6.5.1内符合精度 (3) 6.5.2外符合精度 (3) 7 数据处理成果 (3) 7.1二维平面坐标平差 (3) 7.1.1 平差参数 (3) 7.1.2 平面坐标 (4) 7.2高程拟合 (7) 7.2.1 平差参数 (7) 7.2.2 外符合精度 (7) 7.2.3内符合精度 (9) 8 质量简评 (11) 9 总结 (12)
静态GPS网平差总结报告 1 实习目的 通过对静态GPS控制网的数据处理,从实践中加深对理论知识的理解。通过本次实习还可以熟悉GPS数据处理软件,现在的数据处理基本用软件处理,使用软件也是必备的一个技能。 2 实习任务 本次实习的任务: (1)静态GPS外业数据基线预处理,预处理基线的方差比应尽量调整在99.9,处理后搜索闭合环要基本合格。 (2)选择/建立坐标系,建立昆明87坐标系。 (3)输入已知点并进行网平差,检测内外符合精度。 (4)撰写数据处理总结报告。 3 数据处理依据 依据《卫星定位城市测量技术规范CJJ/T 73—2010》备案号J990—2010 4 精度要求 二维平差中误差1cm 高程拟合中误差2cm 高程内符合中误差3cm 高程外符合中误差5cm 5 已有成果数据 (1)静态GPS外业数据成果(RINEX) (2)已知点的三维坐标,坐标成果见下表
导线测量报告
导线复测报告 (桩号:K0+000—K2+532.854) 计算: 李远进 复核: 韦毅 审核: 庄骏腾 广西建工集团第二建筑工程有限责任公司站前大道扩建及景观带工程 项目经理部 2017-3-15
导线复测报告 本项目复测依据: 《国家三、四等水准测量规范》(GB1 2898-91) 《国家三角测量和精密导线测量规范水》(GB1 2898-91) 《公路测量规范》(JTGC10-2007) 招标文件和设计成果表 注:测量数据以中误差作为衡量精度的标准,在施工中以两倍中误差作为极限误差(允许误差) 一、测量目的 为了满足施工需求,保证工程质量。根据设计院所交导线控制点位置及坐标,进行全线复核及加密测量,对线路平面位置进行精确控制。二、测量仪器 全站仪一台,型号:科力达K93692 编号:KTS-442L 对中杆两把,棱镜两台,对讲机三个。 使用计算工具:9750编程计算器、导线测量平差1.6版软件。 附:按规范要求在控制测量作业前对准备使用的仪器和配套的器具进行检定和校准(后附仪器检验报告复印件)
三、测量精度 测量结果、精度均符合《JTGC10-2007公路测量规范》及设计要求,应满足以下要求:角度闭合差为±10√n,n为测点数;导线全长相对闭合差为±1/17000。 四、坐标及高程系统 1、平面坐标系统采用1954年北京坐标系,中央子午线为111°。高程系统采用1985国家高程基准,坐标投影面700米高程。 五、测量方法 根据城乡建设服务中心所交导线控制点进行附合导线测量,对加密导线控制点坐标值进行了平差计算,采用导线平差1.6版平差软件平差,其精度均满足设计要求。另:对于控制点及水准点桩的埋设,采用地下挖坑浇筑混凝土并埋入铁制标心。由于有先路段狭窄,施工及运输繁忙,或视线差异,控制桩标志露出地面极易破坏;故之,控制桩将挖下10cm~20cm 处,软基将挖到硬基为准。上面并用盖板加以保护,为便于查找,在墙上用红漆注明点号。
测量平差课程设计实习报告 专业班级12测绘工程1班 姓名 学号 指导老师 2015年1月15日
一、课程设计的性质、目的和任务 《测量平差课程设计》是完成测量平差基础课程教学后进行的综合应用该课程基本知识和技能的一个教学环节,通过课程设计培养学生解决生产实际问题的能力和所学基本知识的综合应 用能力。 二、课程设计的主要内容和要求 本课程设计重点检查同学们利用误差理论与测量平差知识,解决测量控制网平差问题的能力。具体课程设计过程中,须手工解算一个平面控制网和一个高程控制网,并用计算机进行检核计算 三、课程设计原始资料 1、水准网严密平差及精度评定示例。 如图所示水准网,有2 个已知点,3 个未知点,7 个测段。已知点高程H1=5.016m,H2=6.016m,各已知数据及观测值见下表。求各待定点的高程;3-4 点的高差中误差,3 号点、4 号点的高程中误差。(提示:本网可采用以测段的高差为平差元素,采用间接平差法计算。)
各观测值如下: (1)手动解算: 该水准网中,总观测值n=7,必要观测t=3,多余观测r=n-t=4,3、4和5点的平差值为参数分别为:X1,X2,X3,相应的近似值取 1.列出误差方程如下: h^1=X^1-H1 h^5=X^2-H1 h^2=X^2-H1 h^6=X^3-H1 h^3=X^1-H2 h^7=X^2-H3 h^4=X^2-H2 由观测数据带入误差方程,得到改正数方程: v1=x^1+0 v5=-x^1-x2-7 v2=x^2+0 v6=-x^1-2 v3=x^1-4 v7=-x^3+0 v4=x^2-3 式中的单位以mm 为单位。 写成矩阵如下: 610 321021101,,h H X h H X h H X +=+=+=
2015年07月 12 日 建议收藏下载本文,以便随时学习!
目录 1 实习目的 (1) 2 实习任务 (1) 建议收藏下载本文,以便随时学习! 3 数据处理依据 (1) 4 精度要求 (1) 5 已有成果数据 (1) 6 数据处理过程 (2) 6.1创建作业及数据导入 (2) 6.2基线预处理 (2) 6.2.1静态基线处理设置 (2) 6.2.2处理基线 (3) 6.2.3搜索闭合环 (3) 6.3设置坐标系 (3) 6.4网平差 (3) 6.5高程内外符合精度检验 (4) 6.5.1内符合精度 (4) 6.5.2外符合精度 (4) 7 数据处理成果 (4) 7.1二维平面坐标平差 (4) 7.1.1 平差参数 (4) 7.1.2 平面坐标 (5) 7.2高程拟合 (8) 7.2.1 平差参数 (8) 7.2.2 外符合精度 (8) 7.2.3内符合精度 (9) 8 质量简评 (12) 9 总结 (12)
静态GPS网平差总结报告 1 实习目的 建议收藏下载本文,以便随时学习! 通过对静态GPS控制网的数据处理,从实践中加深对理论知识的理解。通过本次实习还可以熟悉GPS数据处理软件,现在的数据处理基本用软件处理, 使用软件也是必备的一个技能。 2 实习任务 本次实习的任务: (1)静态GPS外业数据基线预处理,预处理基线的方差比应尽量调整在 99.9,处理后搜索闭合环要基本合格。 (2)选择/建立坐标系,建立昆明87坐标系。 (3)输入已知点并进行网平差,检测内外符合精度。 (4)撰写数据处理总结报告。 3 数据处理依据 依据《卫星定位城市测量技术规范CJJ/T 73—2010》备案号J990—2010 4 精度要求 二维平差中误差1cm 高程拟合中误差2cm 高程内符合中误差3cm 高程外符合中误差5cm 5 已有成果数据 (1)静态GPS外业数据成果(RINEX) (2)已知点的三维坐标,坐标成果见下表
设计报告 设计名称:测量平差课程设计学院名称:测绘工程学院 专业班级:测绘11-3班 学生姓名:邹云龙 学号: 20110242 指导教师:周秋生 黑龙江工程学院教务处制 2013年6月
注:1、在此页后附实习报告、总结。其内容应包括:实习目的、实习内容及实习结果等项目。 2、此页为封皮,用A4幅面纸正反面打印。 3、实习总结使用A4幅面纸张书写或打印,并附此页后在左侧一同装订。 4、实习成绩以优(90~100)、良(80~89)、中(70~79)、及格(60~69)、不及格(60以下)五 个等级评定。
目录 一、水准网观测精度设计 (4) 二、水准网、测角网、边角网平差计算 (6) 1、水准网平差计算 (6) 2、测角网平差计算 (8) 3、边角网平差计算 (12)
一、设计目的 在学完误差理论与测量平差基础课程后,在掌握了测量数据处理基本理论、基本知识、基本方法的基础上,根据设计任务,熟悉自动平差软件的应用,通过实例计算,提高用电子计算机进行相关测量数据处理的能力,在此基础上通过测量程序设计提高用高级语言进行简单测量程序设计的能力。 二、设计任务 (1)水准网观测精度设计 根据所给控制网的形状和高程平差值的点位中误差要求,推求水准高差观测的精度要求。 (2)利用已有平差软件完成下述平差计算任务 1)熟悉前方交会与后方交会计算 分别自选1至2个前后方交会计算实例进行平差计算,熟悉程序使用方法。 2)水准网平差计算 3)导线网平差计算 4)测角网平差计算 分别自选1个水准网、测角网和边角网计算实例进行平差计算,要求每个学生的计算题目不能重复。 建议使用的数据处理软件:测量控制网自动平差系统,黑龙江工程学院,2002年版;平差易,南方测绘,2002年或2005年版。使用指导书见相应电子版文件。 (3)编制测量计算程序 仿照已有测量程序的设计界面和程序计算管理功能,在测角(测边)前方交会与后方交会计算程序、单一符合、闭合水准网平差计算程序、单一符合、闭合导线平差计算程序设计选题中选择一至两项内容进行程序设计,设计使用的语言可采用VB、C、C#等。参考书可选测绘出版社出版,葛永会编《测量程序设计》,和黑志坚等编著的《测量平差》教材,以及针对所使用语言的相关程序设计书籍。 三、设计内容 (一)、水准网观测精度设计 4、水准网如下图所示,各观测高差的路线长度相同。
测量平差实习报告 为期两个星期的平差测量实习已经结束,在这天的实习过程中,我们的收获的确不小,熟练的掌握了全站仪和水准仪,经纬仪的使用,但同时实际测量中,我虽然熟练了对仪器的操作,但同时也在暴露出了自己的缺陷和差距,尤其是对经纬仪的对中方面我还有很大的欠缺,在不用铅垂的情况下很难对中,整平。通过实习中的不断练习,大大缩小了这方面的差距。 在老师的耐心指导和鼓励下,在不怕吃苦,不怕炎热的精神下,我们组的成员相 互理解,团结合作,圆满完成了实习任务,从总体上达到了实习预期的目标和要求。这次总实习给了我们一次全面的、系统的实践锻炼的机会,巩固了所学的理论知识,增强了我们的实际操作能力,我们进一步从实践中认识到实习在工程测量这门课程中的重要性。我以后在工作中光有理论知识是不够的,还要能把理论运用到实践中去才行。 通过实习,我从中深深的理解到”实践是检验真理的唯一标准”。 第一天我们开始的是水准测量,最初我们选择在教学楼前方的那条有花坛的路 上测量,依照要求,先在周围选4个测站,4个转点,然后就行动起来,每个人都很积极,分工 合作,傍晚的时候完成了,当时感到很高兴,心想接下来的一定也很简单了。但 是回来后,和同学互相讨论起来,和其他同学所测的差别很大,想想,有的地方还有误差。我们测量的范围太小,完全不符合要求,需要重测。这是我们的失误,原因是根本就没有分析透试验的要求。这是个教训,我们在此之后时刻想着”细心”两个字,在以后的每次读数中都反复读几遍,也就很少出错了。在实习前都要预习下次要做的内容,所以在接下来的测量中差错逐渐减少,当然速度相应也就快了,”细心”是我们提前完成任务的主要条件。
n 目录 一、目录 ----------------------------1 二、序言 ---------------------------- 2 三、设计思路------------------------ 3 四、程序流程图---------------------- 4 五、程序及说明---------------------- 5 六、计算结果-----------------------12 七、总结 --------------------------- 15 第二部分序言 1、课程设计的性质、目的和任务 误差理论与测量平差是一门理论与实践并重的课程,其课程设计是测量数据处理理论学习的一个重 要的实践环节,它是在我们学习了专业基础课“误差理论与测量平差基础”课程后进行的一门实践课程。其 目的是增强我们对误差理论与测量平差基础理论的理解,牢固掌握测量平差的基本原理和基本公式,熟悉测量数据处理的基本技能和计算方法,灵活准确地应用于解决各类数据处理的实际问题,并能用所学的计算机理论知识,编制简单的计算程序。 2、误差理论与测量平差课程和其它课程的联系和分工 这次课程设计中所用的数学模型和计算方法是我们在误差理论与测量平差课程中所学的内容,所使用的 C 程序语言使我们在计算机基础课程中所学知识。误差理论与测量平差课程设计是测量平差和计算机程 序设计等课程的综合实践与应用,同时也为我们今后步入工作岗位打下了一定基础。 3、课程设计重点及内容 本次课程设计重点是培养我们正确应用公式、综合分析和解决问题的能力,以及计算机编程能力。 另外它要求我们完成1-2 个综合性的结合生产实践的题目。如目前生产实践中经常用到的水准网严密平差 及精度评定,边角网(导线)严密平差及精度评定等。此次我所选的课程设计课题是水准网严密平差及精度 评定,其具体内容如下: 根据题目要求,正确应用平差模型列出观测值条件方程、误差方程和法方程;解算法方程,得出平差后 的平差值及各待定点的高程平差值;评定各平差值的精度和各高程平差值的精度。 具体算例为: 如图所示水准网,有 2 个已知点, 3 个未知点,(1)已知点高程H1=5.016m , H2=6.016m 7 个测段。各已知数据及观测值见下表( 2)高差观测值 (m)
在图 表9-1 试求: (1)1P 、2P 及3P 点高程之最或然值; (2)1P 、2P 点间平差后高差的中误差。 解:(1)列条件方程式,不符值以“mm ”为单位。 已知3,7==t n ,故437=-=r ,其条件方程式为 ??? ? ? ?? =--+=-+--=-+--=++-01030707742643765521v v v v v v v v v v v v (2)列函数式: 555v h x F +== 故 15=f 0764321======f f f f f f (3)组成法方程式。 1)令每公里观测高差的权为1,按1/i i s p =,将条件方程系数及其与权倒数之乘积填于表9-2中。 2)由表9-2数字计算法方程系数,并组成法方程式:
????????????----------5221251021411013????????????d c b a k k k k +????? ???????---1377=0 表9-2 条件方程系数表 (4)法方程式的解算。 1)解算法方程式在表9-3中进行。 2)[]pvv 计算之检核。 [][]wk pvv -= []467.35=-wk 由表9-3中解得[]47.35-=pvv ,两者完全一致,证明表中解算无误。 (5)计算观测值改正数及平差值见表9-4。 (6)计算321,,P P P 点高程最或然值。 359.3611=+=x H H A P m 012.3722=+=x H H A P m
表9-4 改正数与平差值计算表 (7)精度评定。 1)单位权(每公里观测高差)中误差 2)21,P P 点间平差后高差中误差 mm 0.34 47 .35±=±=μ
FJ -3 工程测量技术交流群18874248 省道S 229南坑至源头段 二级公路改建工程 GPS 静态控制测量 网平差报告 萍 乡 公 路 勘 察 设 计 院 二○一一年九月 目 录 一、 GPS 控制点成果表…………………………………………1 二、 GPS 控制点网示意图………………………………………1 三、 GPS 控制网平差报告……………………………………1~4
一、G PS控制点成果表 二、GPS控制点网示意图 三、GPS控制网平差报告 1 坐标系统 1.1 坐标系统名称 Beijing54 1.2 基准参数
1.3 投影参数 M0 =1.00000000 投影比率 H = 0.0000 投影高 Bm =0投影面的平均纬度 B0 =0:00:00.00N 原点纬度 L0 =113:50:00.00E 中央子午线 N0 =0.0000 北向加常数 E0 =500000.0000 东向加常数 回到顶部 2 三维无约束平差2.1 平差参数 2.2 基线向量及改正数 2.3 τ(Tau)检验表 2.4 τ(Tau)检验直方图
2.5 自由网平差坐标 回到顶部 3 二维约束平差 3.1 平差参数 3.2 平面距离平差值 3.3 平面坐标 ***** 回到顶部
4 高程拟合 4.1 平差参数 4.2 高程拟合坐标 240.7246 回到顶部 5 基线闭合差 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G1->G2.242A 99.9 0.0077 -1046.7333 -648.5635 534.7004 1342.4566 G1->G3.242A 99.9 0.0068 -3110.1745 -2426.1123 1829.3052 4348.0529 G2->G3.242A 99.9 0.0062 -2063.4456 -1777.5444 1294.6074 3015.5398 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.76ppm EX = 0.0043 EY = -0.0043 EZ = -0.0026 8706.0493 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G1->G4.242B 65.6 0.0072 -5107.6816 -3742.5441 2584.4937 6839.1999 G1->G2.242A 99.9 0.0077 -1046.7333 -648.5635 534.7004 1342.4566 G2->G4.242B 99.9 0.0072 -4060.9524 -3093.9755 2049.7944 5501.4248 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.48ppm EX = -0.0041 EY = 0.0051 EZ = 0.0010 13683.0814 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G1->GD1.242X 99.9 0.0087 507.9850 -1545.3781 3267.2106 3649.7818 G1->G2.242A 99.9 0.0077 -1046.7333 -648.5635 534.7004 1342.4566 G2->GD1.242X 99.9 0.0065 1554.7134 -896.8104 2732.5118 3269.2543 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.80ppm EX = -0.0048 EY = 0.0042 EZ = 0.0017 8261.4927 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G3->G4.242B 99.9 0.0063 -1997.5067 -1316.4322 755.1870 2508.6519 G1->G3.242A 99.9 0.0068 -3110.1745 -2426.1123 1829.3052 4348.0529 G1->G4.242B 65.6 0.0072 -5107.6816 -3742.5441 2584.4937 6839.1999 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.12ppm EX = -0.0003 EY = 0.0004 EZ = 0.0015 13695.9047 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G3->GD1.242X 99.9 0.0071 3618.1569 880.7382 1437.9069 3991.7835 G1->G3.242A 99.9 0.0068 -3110.1745 -2426.1123 1829.3052 4348.0529 G1->GD1.242X 99.9 0.0087 507.9850 -1545.3781 3267.2106 3649.7818 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.42ppm EX = 0.0026 EY = -0.0040 EZ = -0.0015 11989.6182 Baseline Type rms dx dy dz distance ------------------------------------------------------------------------------------------- G4->GD1.242X 99.9 0.0073 5615.6650 2197.1667 682.7190 6068.7182 G1->G4.242B 65.6 0.0072 -5107.6816 -3742.5441 2584.4937 6839.1999 G1->GD1.242X 99.9 0.0087 507.9850 -1545.3781 3267.2106 3649.7818 ------------------------------------------------------------------------------------------- 同步环( 3 baselines) 相对误差= 0.16ppm EX = 0.0015 EY = -0.0007 EZ = -0.0022 16557.6999
华南农业大学11测绘GPS控 制网测量 GPS网平差结果 施工单位:11测绘第二小组 负责人:梁永健 观测时间:2013年06月18日
观测数据: 文件名观测日期开始结束点名天线高天线高机号60181691.STH 2013年06月18日 09时37分 12时13分 6018 1.219 1.143 H1186209758 60181693.STH 2013年06月18日 12时46分 13时38分 6018 1.512 1.501 S5******* 60191691.STH 2013年06月18日 09时42分 10时30分 6019 1.359 1.348 S0******* 60501692.STH 2013年06月18日 11时24分 13时38分 6050 1.472 1.395 H1186208939 CL011691.STH 2013年06月18日 09时37分 10时32分 CL01 1.492 1.415 H1186208939 CL021691.STH 2013年06月18日 09时35分 10时39分 CL02 1.535 1.524 S0******* CL031692.STH 2013年06月18日 11时03分 13时38分 CL03 1.329 1.318 S0******* CL041693.STH 2013年06月18日 12时51分 13时59分 CL04 1.156 1.080 H1186209758 GP041692.STH 2013年06月18日 11时18分 13时40分 GP04 0.236 0.236 S0******* XX021691.STH 2013年06月18日 09时07分 12时12分 XX02 0.106 0.106 S5******* 基线解算: 60181691-60191691 观测量L1 L2 P2同步时长 48分钟历元间隔:30 高度截止角:20.0 三差解 0.000 453.731 87.026 247.558 524.147 1/1 双差浮点解 0.040 453.925 86.229 247.285 524.054 1/13095 双差固定解 28.81 0.027 453.992 86.247 247.310 524.127 1/19328 60181691-60501692 观测量L1 L2 P2同步时长 49分钟历元间隔:30 高度截止角:20.0 三差解 0.009 -355.578 -126.826 -49.205 380.712 1/44764 双差浮点解 0.012 -355.579 -126.900 -49.251 380.743 1/30669 双差固定解 89.39 0.013 -355.650 -126.924 -49.253 380.818 1/29569 60501692-60181693 观测量L1 L2 P2同步时长 52分钟历元间隔:30 高度截止角:20.0 三差解 0.007 355.550 126.914 49.256 380.722 1/58172 双差浮点解 0.010 355.550 126.859 49.249 380.703 1/37173 双差固定解 25.33 0.011 355.669 126.916 49.261 380.834 1/34257 60181691-CL011691 观测量L1 L2 P2同步时长 55分钟历元间隔:30 高度截止角:20.0 三差解 0.006 882.655 235.299 378.540 988.806 1/168531 双差浮点解 0.009 882.616 235.317 378.552 988.780 1/107755 双差固定解 33.68 0.010 882.609 235.365 378.590 988.800 1/96010 CL011691-60191691 观测量L1 L2 P2同步时长 48分钟历元间隔:30 高度截止角:25.0 三差解 0.014 -428.657 -149.084 -131.348 472.467 1/32787 双差浮点解 0.037 -428.725 -149.166 -131.311 472.544 1/12944 双差固定解 26.65 0.024 -428.614 -149.113 -131.277 472.418 1/19988 60181691-CL021691 观测量L1 L2 P2同步时长 61分钟历元间隔:30 高度截止角:20.0 三差解 0.006 930.849 131.704 584.022 1106.755 1/170886 双差浮点解 0.012 930.812 131.713 584.021 1106.725 1/92845 双差固定解 37.77 0.013 930.816 131.747 584.051 1106.748 1/86209 CL021691-60191691 观测量L1 L2 P2同步时长 48分钟历元间隔:30 高度截止角:20.0 三差解 0.016 -476.686 -45.576 -336.630 585.344 1/36483 双差浮点解 0.037 -476.957 -45.540 -336.753 585.632 1/15768 双差固定解 28.96 0.024 -476.822 -45.494 -336.730 585.505 1/23925 CL021691-CL011691 观测量L1 L2 P2同步时长 55分钟历元间隔:30 高度截止角:20.0