第31卷第4期农业工程学报V ol.31 No.4
2015年2月Transactions of the Chinese Society of Agricultural Engineering Feb. 2015 85 基于理想传动比的主动前轮转向控制
王春燕,崔滔文,赵万忠※,陈俊飞
(南京航空航天大学车辆工程系,南京 210016)
摘要:针对目前汽车主动前轮转向系统缺少对理想传动比规律研究的问题,建立线性二自由度车辆模型、主动前轮转向系统模型,以及轮胎模型;设计固定横摆角速度增益下的主动前轮转向系统理想传动比规律,提出基于该规律的主动前轮转向附加转角闭环控制策略,并对提出的控制策略进行仿真分析和试验验证。结果表明:基于理想传动比的前轮主动转向附加转角控制策略可有效保证车辆在低速时横摆角速度响应幅值变大,车辆具有较好的操纵性;高速时横摆角速度和质心侧偏角响应的幅值均变小,车辆具有较好的稳定性,有利于车辆获得较为理想的转向品质。研究结果可为主动前轮转向系统的设计与开发提供理论基础。
关键词:车辆;控制;转向;理想传动比;附加转角
doi:10.3969/j.issn.1002-6819.2015.04.012
中图分类号:U463.4 文献标志码:A 文章编号:1002-6819(2015)-04-0085-06
王春燕,崔滔文,赵万忠,等. 基于理想传动比的主动前轮转向控制[J]. 农业工程学报,2015,31(4):85-90.
Wang chunyan, Cui Taowen, Zhao Wanzhong, et al. Active front wheel steering control based on ideal transmission ratio[J].
Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(4): 85-90. (in Chinese with English abstract)
0 引 言
汽车主动前轮转向系统采用转角电机和双行星齿轮机构控制系统的位移传递特性[1-4],通过变传动比控制和主动转向干预稳定性控制[5-8],较好地解决了汽车低速转向轻便与高速转向稳定的矛盾,使驾驶员路感和汽车的操纵稳定性得到协调统一[9-11]。
目前,对主动前轮转向的研究主要集中在提高车辆稳定性控制方面[12-17]。通过监测车辆行驶状态,根据驾驶员的驾驶意图,及时对车辆进行控制,提高车辆的路径跟踪性能及车辆的行驶稳定性[18-22]。这些研究中通常假定主动前轮转向系统能够理想地产生所需要的前轮附加转角,并用于车辆运动控制,但缺乏对该附加转角应遵循的理想传动比规律,以及基于该规律的附加转角控制策略进行研究[23-25]。然而,基于理想传动比的附加转角控制是主动前轮转向的核心问题,是决定系统转向品质的关键因素[26]。因此,有必要探究主动前轮转向系统的理想传动比规律,探索理想传动比下的附加转角控制策略。
基于此,本文建立二自由度车辆模型,转向盘和转向轴、双排行星齿轮机构、齿轮齿条机构和轮胎模型组成的主动前轮转向系统模型,以及轮胎模型;考虑理想传动比的影响因素,设计固定横摆角速度增益时的理想传动比规律。在此基础上,提出主动前轮转向附加转角
收稿日期:2014-10-26 修订日期:2015-01-19
基金项目:国家自然科学基金(51375007,51205191);南京航空航天大学基本科研业务费专项科研项目(NS2013015)
作者简介:王春燕,女,博士,副教授,研究方向为汽车系统动力学及控制。南京南京航空航天大学车辆工程系,210016。Email:wcy2000@https://www.doczj.com/doc/d610477219.html, ※通信作者:赵万忠,男,博士,副教授,研究方向为汽车系统动力学。南京南京航空航天大学车辆工程系,210016。Email:zhaowanzhong@https://www.doczj.com/doc/d610477219.html, 控制策略,并对理想传动比下的车辆响应与固定传动比的车辆响应进行对比分析。通过对理想传动比规律以及该规律下附加转角控制策略进行研究,为主动前轮转向系统的设计与开发提供理论基础。
1 系统动力学建模
1.1 线性二自由度车辆模型
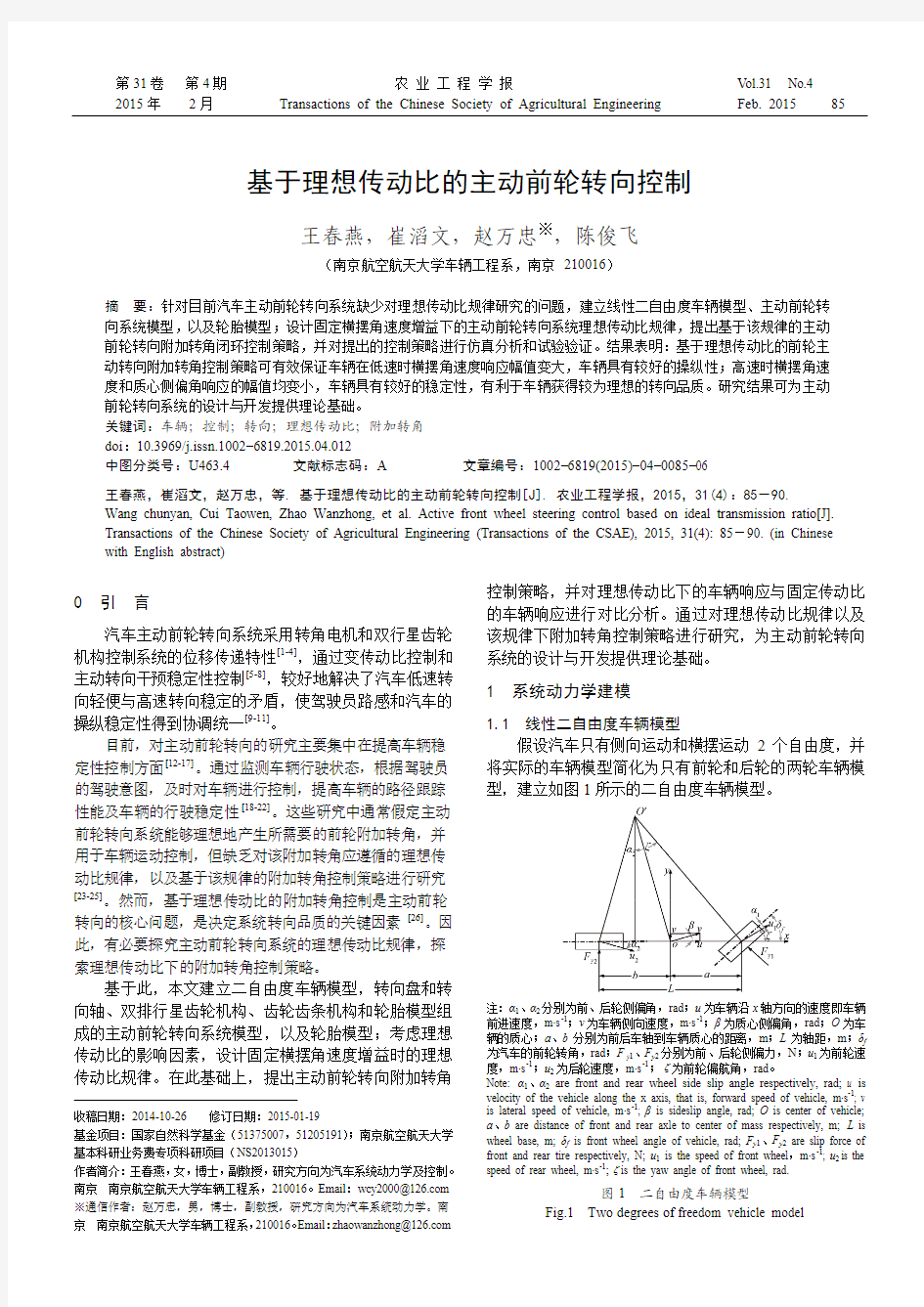
假设汽车只有侧向运动和横摆运动2个自由度,并将实际的车辆模型简化为只有前轮和后轮的两轮车辆模型,建立如图1所示的二自由度车辆模型。
注:α1、α2分别为前、后轮侧偏角,rad;u为车辆沿x轴方向的速度即车辆前进速度,m·s-1;v为车辆侧向速度,m·s-1;β为质心侧偏角,rad;O为车辆的质心;a、b分别为前后车轴到车辆质心的距离,m;L为轴距,m;δf 为汽车的前轮转角,rad;F y1、F y2分别为前、后轮侧偏力,N;u1为前轮速度,m·s-1;u2为后轮速度,m·s-1;ζ为前轮偏航角,rad。
Note: α1、α2 are front and rear wheel side slip angle respectively, rad; u is velocity of the vehicle along the x axis, that is, forward speed of vehicle, m·s-1; v is lateral speed of vehicle, m·s-1; β is sideslip angle, rad; O is center of vehicle;
a、b are distance of front and rear axle to center of mass respectively, m; L is wheel base, m; δf is front wheel angle of vehicle, rad; F y1、F y2 are slip force of front and rear tire respectively, N; u1 is the speed of front wheel,m·s-1; u2is the speed of rear wheel, m·s-1;ζis the yaw angle of front wheel, rad.
图1 二自由度车辆模型
Fig.1 Two degrees of freedom vehicle model
农业工程学报 2015年
86
二自由度车辆运动微分方程可以表述为:
1212122121211()(-)()1()(-)r f r r f z r
k k ak bk k m v u u
ak bk a k b k ak I u βωδωβωδω?
++?=+???
??+?=??
(1) 式中:I z 为汽车绕Z 轴转动的转动惯量,kg/m 2;k 1为前轮侧偏刚度,N/m ;k 2为后轮侧偏刚度,N/m ;ωr 为转向时汽车的横摆角速度,rad/s ;δf 为汽车的前轮转角,rad ;a 、b 分别为前后车轴到车辆质心的距离,m ;u 为车辆沿x 轴方向的速度即车辆前进速度,m/s ;v 为车辆侧向速度,m/s 。
1.2 主动前轮转向系统模型 1.
2.1 转向盘转向轴模型
转向盘与转向轴系统的动力学方程可描述为:
S
SW
S
SW
D
S
J B T T δ
δ+=? (2) 1()S S SW S T K δδ=? (3)
式中:J s 为方向盘和转向轴的等效的转动惯量,
kg·m 2;δsw 为方向盘转角,rad ;B s 转向轴的粘性阻尼系数,N·m/(rad/s);T d 为作用在转向盘上的转向转矩,N·m ;T s 为扭矩传感器输出转矩,N·m ;k s 为转向轴的扭转刚度系数,N·m/ rad ;δs 1为上排行星轮系中太阳轮转角,rad 。 1.2.2 双排行星轮系模型
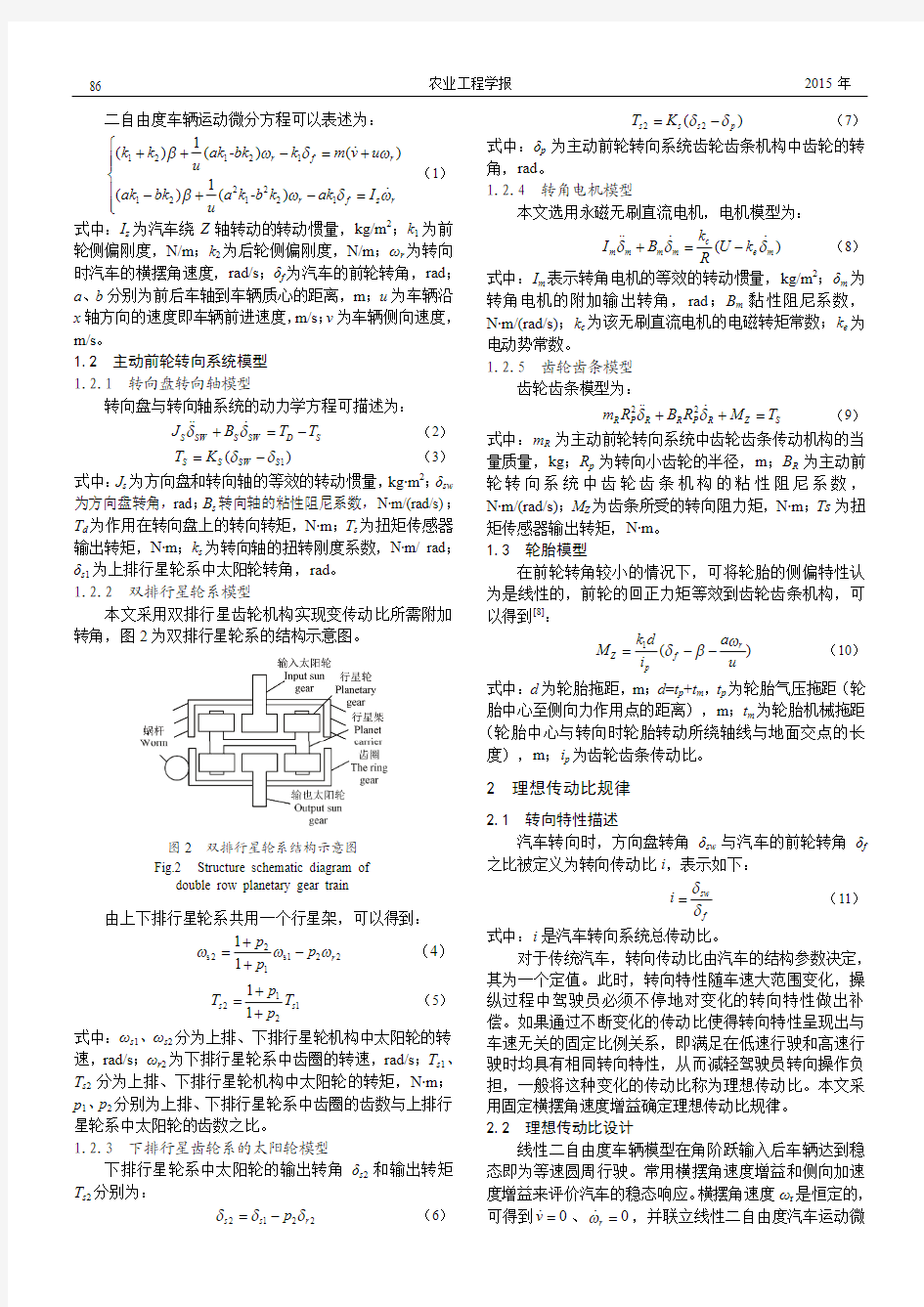
本文采用双排行星齿轮机构实现变传动比所需附加转角,图2为双排行星轮系的结构示意图。
图2 双排行星轮系结构示意图 Fig.2 Structure schematic diagram of
double row planetary gear train
由上下排行星轮系共用一个行星架,可以得到:
2
s 2s1221
11r p p p ωωω+=?+ (4)
1
212
11s s p T T p +=
+ (5) 式中:ωs 1、ωs 2分为上排、下排行星轮机构中太阳轮的转速,rad/s ;ωr 2为下排行星轮系中齿圈的转速,rad/s ;T s 1、T s 2分为上排、下排行星轮机构中太阳轮的转矩,N·m ;p 1、p 2分别为上排、下排行星轮系中齿圈的齿数与上排行星轮系中太阳轮的齿数之比。
1.2.3 下排行星齿轮系的太阳轮模型
下排行星轮系中太阳轮的输出转角δs 2和输出转矩T s 2分别为:
2122s s r p δδδ=? (6)
22()s s s p T K δδ=? (7)
式中:δp 为主动前轮转向系统齿轮齿条机构中齿轮的转
角,rad 。
1.2.4 转角电机模型
本文选用永磁无刷直流电机,电机模型为:
()c
m m m m e m k I B U k R
δδδ+=
? (8) 式中:I m 表示转角电机的等效的转动惯量,kg/m 2;δm 为转角电机的附加输出转角,rad ;B m 黏性阻尼系数,N·m/(rad/s);k c 为该无刷直流电机的电磁转矩常数;k e 为电动势常数。
1.2.5 齿轮齿条模型
齿轮齿条模型为:
22R
P
R
R
P
R
Z
S
m R B R M T δ
δ++= (9) 式中:m R 为主动前轮转向系统中齿轮齿条传动机构的当量质量,kg ;R p 为转向小齿轮的半径,m ;B R 为主动前轮转向系统中齿轮齿条机构的粘性阻尼系数,N·m/(rad/s);M Z 为齿条所受的转向阻力矩,N·m ;Ts 为扭矩传感器输出转矩,N·m 。 1.3 轮胎模型
在前轮转角较小的情况下,可将轮胎的侧偏特性认为是线性的,前轮的回正力矩等效到齿轮齿条机构,可以得到[8]:
1()r Z f p k d a M i u ω
δβ=?? (10)
式中:d 为轮胎拖距,m ;d =t p +t m ,t p 为轮胎气压拖距(轮
胎中心至侧向力作用点的距离),m ;t m 为轮胎机械拖距(轮胎中心与转向时轮胎转动所绕轴线与地面交点的长度),m ;i p 为齿轮齿条传动比。
2 理想传动比规律
2.1 转向特性描述
汽车转向时,方向盘转角δsw 与汽车的前轮转角δf
之比被定义为转向传动比i ,表示如下:
sw
f
i δδ=
(11) 式中:i 是汽车转向系统总传动比。
对于传统汽车,转向传动比由汽车的结构参数决定,其为一个定值。此时,转向特性随车速大范围变化,操纵过程中驾驶员必须不停地对变化的转向特性做出补偿。如果通过不断变化的传动比使得转向特性呈现出与车速无关的固定比例关系,即满足在低速行驶和高速行驶时均具有相同转向特性,从而减轻驾驶员转向操作负担,一般将这种变化的传动比称为理想传动比。本文采用固定横摆角速度增益确定理想传动比规律。 2.2 理想传动比设计
线性二自由度车辆模型在角阶跃输入后车辆达到稳态即为等速圆周行驶。常用横摆角速度增益和侧向加速度增益来评价汽车的稳态响应。横摆角速度ωr 是恒定的,
可得到0v
= 、0r ω= ,并联立线性二自由度汽车运动微
第4期 王春燕等:基于理想传动比的主动前轮转向控制
87
分方程式,可以得到横摆角速度为:
2
2221//11()r f f u L u L
m a b Ku u k k L ωδδ==++? (12) 式中:K 为稳定性因数,K=m /L 2(a /k 2?b /k 1),s 2/m 2;L 为轴距,m 。
因此,期望横摆角速度增益可以表示为:
2/1f
r sw sw sw
u L G Ku δωδδ=
=+ (13) 式中:G sw 为期望横摆角速度增益,s -1。
固定期望横摆角速度增益下的传动比可以表示为:
2/11sw sw f sw u L i G Ku δδ==+ (14)
为了防止低速传动比过小造成的转向轮对转向盘的过大的冲击,影响路感和驾驶员对车辆的操纵,参考文
献[8],
车速小于30 km/h 时,设置理想传动比最小值为9。设计G sw 为定值时的理想传动比规律如下:
29
(30km/h)/1(30km/h)1sw
u i u L u G Ku
=??
+?≥ (15)
式(1)用矩阵形式可以表示为:
当u <30 km/h 时,
121122
22112121()1(/9)1()sw r r z z z k k k ak bk mu mu mu ak ak bk a k b k I I uI ββδωω+????
??????????????=??????????????+?????
?? (16)
当u ≥30 km/h 时,
121222212121211()11()/1/()1r r z z sw sw z k k ak bk mu mu
ak bk a k b k I uI k mu u L ak G Ku I ββωωδ+??
??????????=????????????+????
??????+??????
(17)
3 基于理想传动比规律的主动前轮转向控制策略
3.1 附加转角闭环控制
主动前轮转向通过双行星排机构实现转向系统的可变传动比,要使转向轮按照转向盘和可变传动比决定的期望前轮转角进行准确的转向,需要对附加转角电机进行位置控制。
由齿轮传动的关系,可以得到:
2/r m m i ωω= (18) 式中:ωm 为附加转角电机的转速,rad/s ;i m 表示涡轮蜗杆传动机构的减速比。
对上式积分可得电机附加转角与下排齿圈的转角关系如下:
2/r m m i δδ= (19)
式中:δr 2为双排行星齿轮机构中下排齿圈的转角,即下排齿圈涡轮的转角,rad ;δm 为电机的附加转角,rad 。
进一步可以得到:
22s sw m m p
i δδδ=? (20)
又齿轮齿条的传动比为i p ,总的转向传动比为i ,即有i p =δp /δf ,i=δsw /δf ,代入式(20)可得:
211
()m p m sw p i i p i i δδ=? (21)
因此,控制电机附加转角的大小,使主动前轮转向系统的传动比为设计的理想传动比规律,其控制框图如图3所示。
图3 主动前轮转向系统控制框图
Fig.3 Control diagram of active front steering system
3.2 仿真分析
在Matlab/Simulink 中搭建主动前轮转向系统及二自由度车辆模型,系统主要仿真参数如表1所示。采用PID 控制方法,控制参数为K P =10、K i =0.5、K d =0.01;转向盘的力矩输入的控制参数为K p 1=50、K i 1=6.8、K d 1=0.097。
表1 主要仿真参数
Table 1 Main simulation parameters
名称 Name
数值Value
名称 Name 数值 Value 整车总质量
Vehicle total mass m /kg
1 818.
2 等效转动惯量
Equivalent moment of inertia
J S /(kg·m 2)
0.04
整车绕Z 轴的转动惯量Vehicle moment of inertia around Z axis I Z /(kg·m 2
) 3 885 转向轴扭转刚度系数
Torsional rigidity coefficient of
steering shaft
K S /(N·m·rad -1)
250
前轴至车辆质心的距离
Distance from front axle to
center of mass a /m
1.463转向轴粘性阻尼系数
Viscous damping coefficient of steering shaft
B S /(N·m·(rad·s -1)-1)
0.225
后轴至车辆质心的距离Distance from rear axle to center of mass b /m 1.585前轮侧偏刚度 Front tire cornering stiffness k 1/(N·rad -1) -62 618后轮侧偏刚度 Rear tire cornering stiffness k 2/(N·rad -1) -110 185 齿轮齿条机构的当量质量Equivalent mass of gear and
rack mechanism m R /kg
32 电动势常数
Electromotance constant k e 0.045
电磁转矩常数
Electromagnetic torque
constant k m
0.65
涡轮蜗杆传动 机构的减速比 Reduction ratio of the turbine worm transmission mechanism i m 30 齿轮齿条机构的 粘性阻尼系数
Viscous damping coefficient of
gear and rack mechanism
B R /(m·(rad·s -1)-1)
653.2
轮胎拖距
Pneumatic trail d /m
0.1 重力加速度
Acceleration of gravity
g /(m·s -2)
9.8 转向小齿轮的半径
Steering pinion radius R p /m
0.0079 齿轮齿条的传动比
Transmission ratio of gear and
rack i p
20
农业工程学报 2015年
88
3.2.1 角阶跃输入仿真分析
选取转向盘的期望转角为30°,车速分别为20和100 km/h 进行角阶跃输入仿真,仿真结果如图4所示。由图4a 可以看出,当车速为20 km/h 时,理想传动比规律下的主动前轮转向车辆横摆角速度相比固定传动比,车辆响应幅值变大,此时车辆具有更好的转向灵敏度,
有利于获得较好的低速转向操纵性能。由图4a 、
4b 可知,当车速为100 km/h 时,理想传动比规律下的主动前轮转向车辆横摆角速度和质心侧偏角响应相比固定传动比,车辆幅值均变小,此时车辆具有更好的转向稳定性,有利于高速汽车稳定行驶。
a. 横摆角速度
a. Yaw rate
b. 质心侧偏角 b. Sideslip angle
图4 车速为20和100 km/h 下车辆阶跃响应 Fig.4 Step response of vehicle at 20 and 100 km/h
3.2.2 正弦输入仿真分析
正弦输入为模拟车辆行驶过程中的变道操作,常用模拟实际试验的蛇形操作,以其结果来评价转向盘的操纵稳定性。选取转向盘转角幅值30°,周期为5 s ,车速分别为20和100 km/h 进行仿真分析,仿真结果如图5所示。
a. 横摆角速度
a. Yaw rate
b. 质心侧偏角 b. Sideslip angle
图5 车速为20和100 km/h 下车辆正弦响应
Fig.5 Sinusoidal response of vehicle at 20 and 100 km/h
由图5可以看出,与固定传动比的车辆相比,当车
速为20 km/h 时,
理想传动比规律下的主动前轮转向车辆横摆角速度响应幅值明显增大,因此,车辆在低速时具有更好的转向灵敏度;当车速为100 km/h 时,理想传动比规律下的车辆横摆角速度和质心侧偏角响应幅值均变小,因此,车辆在高速时具有更好的转向稳定性。
综上所述,与固定传动比的车辆相比,主动前轮转向系统通过变传动比控制可有效保证汽车在低速时获得更好的转向轻便性,在高速时获得更好的转向稳定性,从而不仅使转向轻便性和转向路感协调统一,而且可以实现主动安全性和转向轻便性的完美融合。 3.3 试验验证
为了进一步验证根据控制策略设计的助力控制器对主动前轮转向系统力特性的改善,进行原地转向和转向盘中间位置的实车试验,试验场地为干燥、平坦的水泥路面。
原地及低速转向力特性试验时,驾驶员分别在0和20 km/h 车速下缓慢转动方向盘。图6a 为原地及低速转向试验曲线。从图6a 可以看出,在所设计的助力控制器作用下,实车在原地及低速转向时,转向盘转矩较小,最大转矩仅为4 N·m 左右,转向时驾驶员的操纵力矩较小,实现了低速下的转向轻便性。
a. 原地及低速转向试验
a. Original position and low speed steering test
b. 转向盘中间位置试验
b. Steering wheel in middle position test
图6 实车试验 Fig.6 Vehicle test
转向盘中间位置试验是用来评价汽车在高速行驶时
操纵稳定性的重要方法。试验时汽车以100 km/h 的速度作正弦曲线的蛇形行驶,正弦运动的周期为 5 s 。图6b
第4期王春燕等:基于理想传动比的主动前轮转向控制89
为转向盘中间位置试验曲线。由图6b可知,随着侧向加速度的增大,转向盘转矩逐渐增大,转向系统的操纵稳定性可以较好的满足要求。
4 结 论
1)建立了线性二自由度车辆模型、轮胎模型,以及由转向盘和转向轴、双排行星齿轮机构、下排行星齿轮系的太阳轮机构、转角电机及齿轮齿条机构等组成的前轮主动转向系统模型。
2)考虑理想传动比的影响因素,设计了固定横摆角速度增益下的主动前轮转向系统理想传动比规律,提出了主动前轮转向系统附加转角PID控制策略。
3)仿真和试验结果表明,基于理想传动比规律的主动前轮转向系统附加转角控制,可有效保证车辆在低速时具有较好的灵敏度,高速时具有较好的稳定性,从而使车辆获得较为理想的转向品质。
[参 考 文 献]
[1] 赵万忠,孙培坤,刘顺. 力与位移耦合控制的主动转向系
统协同优化[J]. 机械工程学报,2012,48(18):112-116.
Zhao Wanzhong, Sun Peikun, Liu Shun. Collaborative optimization of active steering system with force and displacement coupled control[J]. Journal of Mechanical Engineering, 2012, 48(18): 112-116. (in Chinese with English abstract)
[2] Wada N, Takahashi A, Saeki M, et al. Vehicle yaw control
using an active front steering system with measurements of
lateral tire forces[J]. Journal of Robotics and Mechatronics,
2011, 23(1): 83-93.
[3] 李刚,宗长富,姜立勇,等. 主动前轮转向与直接横摆力
矩集成控制算法[J]. 吉林大学学报:工学版,2011,41(2):
54-58.
Li Gang, Zong Changfu, Jiang Liyong, et al. Active front
steering and direct yaw moment integrated control algorithm[J]. Journal of Jilin University: Engineering and
Technology Edition, 2011, 41(2): 54-58. (in Chinese with
English abstract)
[4] Zhang J, Kim J, Xuan D, et al. Design of active front steering
(AFS) system with QFT control[J]. International Journal of
Computer Applications in Technology, 2011, 41(3/4): 236-
245.
[5] 季鹏凯,沈斌,陈慧,等. 主动转向系统鲁棒控制的研究[J].
汽车工程,2013,35(12):1092-1098.
Ji Pengkai, Shen Bin, Chen Hui, et al. A study on the robust
control of active steering system[J]. Automotive Engineering,
2013, 35(12): 1092-1098. (in Chinese with English abstract)
[6] Zhao Wanzhong, Sun P, Liu Shun. Multi-objective optimization
of active steering system with force and displacement coupled control[J]. Journal of Central South University, 2012,
19(4): 974-981.
[7] 李一染,陈慧,高博麟. 自抗扰控制在前轮主动转向控制
中的应用[J]. 汽车工程,2011,33(5):388-391.
Li Yiran, Chen Hui, Gao bolin. Application of active disturbance rejection control to active front steering control[J].
Automotive Engineering, 2011, 33(5): 388-391. (in Chinese
with English abstract) [8] 陈德玲. 主动前轮转向系统的控制研究[D]. 上海:上海交
通大学,2008.
Chen Deling. Investigation to Control of an Active Front
Steering System[D]. Shanghai: Shanghai Jiao Tong University, 2008. (in Chinese with English abstract)
[9] Gao Zhenhai, Wang Jun, Wang Deping. Dynamic modeling
and steering performance analysis of active front steering
system[J]. Procedia Engineering, 2011(15): 1030-1035.
[10] Doumiati M, Sename O, Dugard L, et al. Integrated vehicle
dynamics control via coordination of active front steering and
rear braking[J]. European Journal of Control, 2013, 19(2):
121-143.
[11] 丁能根,康乐,王健,等. 侧向风干扰下的汽车主动前轮
转向最优控制[J]. 北京理工大学学报,2013,39(2):161-
165.
Ding Nenggen, Kang Le, Wang Jian, et al. Optimal control of
active front wheel steering for vehicles under perturbation of
crosswind[J]. Journal of Beijing University of Technology,
2013, 39(2): 161-165. (in Chinese with English abstract) [12] 张宗强. 汽车主动前轮转向系统控制策略[D]. 南京:南京
航空航天大学,2014.
Zhang Zongqiang. Research on Control Strategy of Active
Front Steering System for Automotive[D]. Nanjing: Nanjing
University of Aeronautics and Astronautics, 2014. (in Chinese with English abstract)
[13] 杜峰,闫光辉,魏朗,等. 主动四轮转向汽车最优控制及
闭环操纵性仿真[J]. 汽车工程,2014,36(7):848-852.
Du Feng, Yan Guanghui, Wei Lang, et al. Optimal control
and closed-loop controllability simulation for active four-wheel
steering vehicle[J]. Automotive Engineering, 2014, 36(7):
848-852. (in Chinese with English abstract)
[14] 魏建伟. 主动转向控制机理及其干预使EPS系统转向路感
研究[D]. 南京:南京航空航天大学,2011.
Wei Jianwei. Research on Control Mechanism of Active
Steering and Steering Feeling of EPS System with the Interference of Active Steering[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2011. (in Chinese with English abstract)
[15] 李强,施国标,林逸,等. 主动前轮转向控制技术研究现
状与展望[J]. 汽车工程,2009,31(7):629-633.
Li Qiang, Shi Guobiao, Lin Yi, et al. Status and prospect of
the research on active front steering control technology[J].
Automotive Engineering, 2009, 31(7): 629-633. (in Chinese
with English abstract)
[16] 李彬,喻凡. 四轮主动转向的模型跟踪控制[J]. 上海交通
大学学报,2009,43(10):1531-1535.
Li Bin, Yu Fan. Model following control of four-wheel active
steering vehicle[J]. Journal of Shanghai Jiaotong University,
2009, 43(10): 1531-1535. (in Chinese with English abstract)
[17] Wang Jun, Gao Zhenhai, Lou Fangming. Research on
variable steer ratio of active front steering system with fluctuating velocity[C]//Society of Automotive Engineers.
Vehicle Design and Testing-Paper compilation on the 34th
FISITA World Automotive Congress. USA: SAE-China and
FISITA, 2013: 475-485.
[18] You S S, Choi H S, Kim H S, et al. Active steering for
intelligent vehicles using advanced control synthesis[J].
International Journal of Vehicle Design, 2006, 42(3/4): 244-
262.
农业工程学报 2015年90
[19] Fukao T, Miyasaka S, Mori K. Active steering systems based
on model reference adaptive nonlinear control[J]. Vehicle System Dynamics, 2004, 42(5): 301-318.
[20] Zheng B, Anwar S. Yaw stability control of a steer-by-wire
equipped vehicle via active front wheel steering[J].
Mechatronics, 2009, 19(6): 799-804.
[21] Xiang Ding, Yuan Jie, Xu Wu. Study on fuzzy PID algorithm
for a new active front steering system[J]. Journal of Control
Engineering and Technology, 2012, 2(1): 24-29.
[22] Li Qiang, Shi Guobiao, Lin Yi, et al. Yaw rate control of
active front steering based on fuzzy-logic controller[C]//Hu
Zhengbin. Education Technology and Computer Science-IEEE
Computer Society CPS(Pending). Wuhan: Wuhan University
Press, 2010: 125-128.
[23] 张红党. 汽车主动前轮转向系统的特性研究[D]. 镇江:江
苏大学,2009.
Zhang Hongdang. Study on Characteristic of Active Front Steering System[D]. Zhenjiang: Jiangsu University, 2009. (in Chinese with English abstract)
[24] 余卓平,赵治国,陈慧. 主动前轮转向对车辆操纵稳定性
能的影响[J]. 中国机械工程,2005,16(7):652-657.
Yu Zhuoping, Zhao Zhiguo, Chen Hui. Influences of active front wheel steering on vehicle maneuver and stability performance[J]. China Mechanical Engineering, 2005, 16(7): 652-657. (in Chinese with English abstract)
[25] Chu Liang, Gao Xinzhao, Guo Jianhua, et al. Coordinated
control of electronic stability program and active front steering[J].
Procedia Environmental Sciences, 2012(12): 1379-1386.
[26] Nam K, Oh S, Fujmoto H, et al. Robust yaw stability control
for electric vehicles based on active front Steering control through a steer-by-wire system[J]. International Journal of Automotive Technology, 2012, 13(7): 1169-1176.
Active front wheel steering control based on ideal transmission ratio
Wang Chunyan, Cui Taowen, Zhao Wanzhong※, Chen Junfei
(Department of Automotive Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China) Abstract:Active front steering system with variable transmission ratio control can solve the contradiction of steering portability at low speed and steering stability at high speed, and coordinate the vehicle handling stability and road feeling of the driver. The study of the active front steering system usually assumes that the steering system is able to generate the needed additional angle of front wheel ideally, and it is used for vehicle motion control. However, this method is lack of the study of the ideal transmission ratio law that the additional angle should follow, and the corresponding control strategy of the additional angle. In order to solve these problems, the linear vehicle model with two degrees of freedom, tire model, and active front steering system model involving steering wheel, steering shaft and double row planetary gear mechanism, the lower planetary gear sun wheel mechanism, rotation angle motor and gear rack mechanism are established. Then, the ideal transmission ratio law with fixed yaw rate gain is designed for active front steering system, based on which the additional angle control strategy of active front wheel steering is studied. According to these, the simulation model with Matlab/Simulink software is established. Selecting the speed at 20 and 100 km/h, simulation analyses of angle step input and sinusoidal input for the proposed control strategy are conducted. The simulation shows that at the speed of 20 km/h, the amplitude of yaw rate with the ideal transmission ratio for active front steering becomes larger, compared with the fixed transmission ratio. At the same time, the vehicle has better steering sensitivity, which is conducive to achieve good steering performance at low speed. At the speed of 100 km/h, the amplitude of yaw rate and sideslip angle becomes smaller with the ideal transmission ratio, in contrast to the fixed transmission ratio. Thus, the vehicle has better steering stability, which is conducive to the stability of vehicle at high speed. In order to verify the force characteristics improvement of the active front steering system based on the designed power assisted controller with the proposed control strategy, the original position and low-speed steering test and the middle position test of steering wheel are carried out. In original position and low-speed steering test, the steering wheel torque of the vehicle is small under the designed assisted controller, whose maximum torque is only 4 N·m. The operating torque of the driver is small, which realizes the steering portability at low speed. The results of simulation analysis and experimental verification show that, the designed control strategy can ensure the vehicle has good sensitivity at low speed and good stability at high speed, which can achieve perfect steering quality. The results of this study can provide the theoretical basis for the design and development of active front steering system.
Key words:vehicles; control; steering; ideal transmission ratio; additional angle
汽车维修2009.5 低)。对照维修手册可知,供油系统压力完全正常。 4 检查传感器 既然发动机备工况的供油压力均正常,空气供给系统也无漏气点存在,那么MAF 传感器和氧传感器就成为被怀疑的对象。 用V.A.Gl55l 检测仪阅读发动机电脑的数据块,通过数据流检查备元件的性能。进入“08-07”数据块,第2区域显示值为0.l0V 。此值为氧传感器电压,正常情况应在0.3 0.7V 之间跳动显示。因为氧传感器电压是排气系统反馈给电脑的信号,影响喷油量,因此怀疑氧传感器堵塞。更换一只氧传感器,但无效果。 进入“08-02”数据块,第4区域显示值为2.0g/S 。此值为空气流量传感器测量的空气流量值,是控制燃油混合比的重要参数,正常情况应在 2.7g/S 左右。进行加速试验,发现该值随节气门开度的憎大而憎大,但在急加速时出现“口火”的概率较大。 从数据流来看,空气流量传感器的数据流在怠速时为2.0g/S 有些偏低。干是,祈下空气质量流量传感器进行检查,发现传感器中的热线虽未断但严重积垢。用清洗剂清洗热线后装复试车,发动机工作一切正常。 因空气质量流量传感器的热线积垢,使其热传导性变差,导致在大空气流量时输送给ECU 的信号偏低,使喷油量偏少,混合气浓度过稀,从而导致发动机怠速不稳、加速不良,甚至在急加速时出现“口火”等现象。 当空气流量憎大时,由干空气带走的热量憎多,为了保持热线电阻的温度,混合集成电路使通过热线电阻R2的电流憎大,反之则电流减小。即通过热线电阻R2的电流随 空气质量流量的憎大而憎大,随空 气质量流量的减小而减小。通过热线电阻的加热电流在流经精密电阻Rl 时,在Rl 上产生电压降,此电压降经混合集成电路转换成频率信号输出给ECU ,ECU 根据此信号确定空气流量的多少。 需要特别指出的是,热线式空气流量传感器具有自洁功能,当发动机熄火时,电路会把热线电阻自动加热至l000 以上保持lS ,以清洁热线电阻上的污物和尘土。但在部分地区,由干使用的燃油品质过低,进气管产生“口火”,造成过多的杂质和积碳胶结在金属铂丝上,故只靠加温热线的净化装置难以清除,而必须定期祈下空气质量流量传感器直接进行清洗,才能恢复其精确测量的功能。 作者单位 徐帅肛业职业技术学院 ll 故障码 Cl549/49 的诊断 起动发动机,用示波器分别检测VGRS ECU 插接器Vll 的端子8(紫色导线)、端子l8(黄/绿色导线)与端子6(白/黑色导线)之间的波形,如果波形为矩形波,更换VGRS ECU ,否则进行下一步骤。 关闭点火开关,拔下VGRS ECU 插接器Vll 和防滑控制ECU 插接器A42,分别检测VGRS ECU 线束侧插接器Vll 的端子8(紫色导线)、端子l8(黄/绿色导线)与防滑控制ECU 线束侧插接器A42的端子l7(紫色导线)、端子l8 (黄/绿色导线)之间的导通情况。如果导通良好,进行下一步骤,否则修理或更换线束和插接器。 分别检测VGRS ECU 线束侧插接器Vll 的端子8、端子l8与车身搭铁之间的绝缘情况,如果绝缘良好,更换防滑控制ECU ,否则修理或更换相应的线束和插接器。 l2 故障码 Cl55l/5l 的诊断 读取VGRS 系统故障码,然后清除故障码。 起动发动机,测量VGRS ECU 插接器Vll 的端子3(黑/白色导线)与端子6(白/黑色导线)之间的电压。如果电压值高干l6V ,检修充电系统;如果电压值低干9V ,检修线束和ECU-IGl 熔断器;如果电压在9 l6V 之间,进行下一步骤。 读取故障码,如果故障码“Cl55l/5l ”重新出现,更换VGRS ECU ,否则可能为间歇性故障,应检查线束和插接器的连接情况。 l3 故障码 Cl552/52 的诊断 读取VGRS 系统故障码,然后清除故障码。 起动发动机,测量VGRS ECU 插接器Vl0的端子l (白色导线)与端子2(白/黑色导线)之间的电压。如果电压值高干l6V ,检修充电系统;如果电压值低干9V ,检修线束和VGRS 熔断器;如果电压在9 l6V 之间,进行下一步骤。 读取故障码,如果故障码“Cl552/52”重新出现,更换VGRS ECU ,否则可能为间歇性故障,应检查线束和插接器的连接情况。 l4 故障码 Cl554/54 的诊断与故障码“Cl552/52”的诊断步骤相同。 l5 故障码 Cl555/55 的诊断 关闭点火开关,检测VGRS ECU 插接器Vl0的端子2(白/黑色导线)与车身搭铁之间的电阻,如果电阻值小干l ,进行下一步骤,否则修理或更换线束和插接器。 接通点火开关,读取故障码,如果读到故障码“Cl522/22”,按该故障图壳睛颠LX470撞寒回霎懂m匝瞻间秦纽缸陷谨团 山东/于京诺 李刚 万方数据
国家职业技能鉴定 汽车维修技师鉴定 专业技术论文 题目_______________________关键词_______________________工作单位_______________________撰写人_______________________ 教导教师_______________________ 交稿日期_______________________
宝马主动转向系统的结构与维修 姓名:姚树成 (浙江吉利技师学院10秋汽机4年2班浙江台州XXXXXX) 【摘要】本论文讲述的是主动转向系的故障给发动机带来的故障以及宝马5系列车型的故障以及排除。 【关键词】主动转向系故障诊断仪故障诊断故障排除 前言 新款宝马5系车型配备了一种先进的电控转向系统(SFA,Active Front Steering)。该系统不仅能够在转向时为驾驶员提供助力,而且能够以主动方式在转向系统中累加一个附加转向角,从而优先转向性能。 装备了AFS系统的车辆,停车时只需要略微转动方向盘,即可获得较大的车轮转向角。当车辆高速行驶时,实际的转向助力需求变小,主动转向系统能够增大转向转动比,甚至超过常规转向系统的水平,这样就可以提高车辆的转向稳定性,并使驾驶员获得良好的手感。在提高转向力矩的同时,主动转向系统能够消除转向漂移现象,是车辆沿着预定的轨迹行驶,驾驶员不必频繁地修正方向。 一、主动转向的任务 (1)用伺服助力转向辅助转向力
(2)通过伺服单元实现盛加转向 (3)通过主动转向控制系统对驾驶进行动态干预 二、主动转向的优点 由驾驶员规定的转向角被主动转向控制的伺服单元益加此时车轮转向的调节力是由助力转向系统产生的,由伺服转向助力系统《阴动产生助力转向使转向力与驾驶状态有最佳匹配。优点是可以在车辆转向时为驾驶员提供助力,并根据行驶动力学参数主动在转向系统中累加一个附加转向角驻车时只摇要较小的转向盘旋转角度就可以使车轮有较大的转向角度转向盘从一侧极限位置到另一侧极限位,只需要转动两圈,传统的要三圈左右。速度较高时,转向传动比会越来越大直至达到常规转向系统的水平,甚至比其传动比更大,同时提高的转向力矩可防止出现不希望的转向移动《比如侧风、超车等情况,驾驶员感觉车辆比较稳定,当出现转向过度俗称甩尾的时候,为了让车辆沿着所濡要的轨迹行驶驾驶员不必修正转向主动转向系统即可对不希望的车辆移动进行补偿。 三、元件 机械机构组件如图1所示。 散热器装在水箱上,转向机和执行单元在维修过程中只能整体更换,液压泵上的ECU电控节流阀在完全通电时适用于转向、停车或调头状态,断电时适用于高速或低速且无转向器要状态和停车且无转向需求状态,优点是低油耗和低二氧化碳排放。
第1章绪论 主动转向系统保留了传统转向系统中的机械构件,包括转向盘、转向柱、齿轮齿条转向机以及转向横拉杆等。其最大特点就是在转向盘和齿轮齿条转向机之间的转向柱上集成了一套双行星齿轮机构,用于向转向轮提供叠加转向角。主动转向系统通过一组双行星齿轮机构实现了独立于驾驶员的转向叠加功能,完美地解决了低速时转向灵活轻便与高速时保持方向稳定性的矛盾,并在此基础上通过转向干预来防止极限工况下车辆转向过多的趋势,进一步提高了车辆的稳定性。同时,该系统能方便地与其他动力学控制系统进行集成控制,为今后汽车底盘一体化控制奠定了良好的基础。 与常规转向系统的显著差别在于,主动转向系统不仅能够对转向力矩进行调节,而且还可以对转向角度进行调整,使其与当前的车速达到完美匹配。其中的总转角等于驾驶员转向盘转角和伺服电机转角之和。低速时,伺服电机驱动的行星架转动方向与转向盘转动相同,叠加后增加了实际的转向角度,可以减少转向力的需求。高速时,伺服电机驱动的行星架转动方向与转向盘转动相反,叠加后减少了实际的转向角度,转向过程会变得更为间接,提高了汽车的稳定性和安全性。 1.1转向系统综述 1、蜗杆曲柄销式转向器 它是以蜗杆为主动件,曲柄销为从动件的转向器。蜗杆具有梯形螺纹,手指状的锥形指销用轴承支承在曲柄上,曲柄与转向摇臂轴制成一体。转向时,通过转向盘转动蜗杆、嵌于蜗杆螺旋槽中的锥形指销一边自转,一边绕转向摇臂轴做圆弧运动,从而带动曲柄和转向垂臂摆动,再通过转向传动机构使转向轮偏转。这种转向器通常用于转向力较大的载货汽车上。 2、循环球式转向器 循环球式:这种转向装置是由齿轮机构将来自转向盘的旋转力进行减速,使转向盘的旋转运动变为涡轮蜗杆的旋转运动,滚珠螺杆和螺母夹着钢球啮合,因而滚珠螺杆的旋转运动变为直线运动,螺母再与扇形齿轮啮合,直线运动再次变为旋转运动,使连杆臂摇动,连杆臂再使连动拉杆和横拉杆做直线运动,改变车轮的方向。这是一种古典的机构,现代轿车已大多不再使用,但又被最新方式的助力转向装置所应用。它的原理相当于利用了螺母与螺栓在旋转过程中产生的相对移动,而在螺纹与螺纹之间夹入了钢球以减小阻力,所有钢球在一个首尾相连的封闭的螺旋曲线
空客A320s飞机前轮转弯系统排故分析 发表时间:2019-09-20T10:58:02.443Z 来源:《基层建设》2019年第20期作者:钱振华 [导读] 摘要:随着经济发展的进步,我国在对航空工业也取得了很大的进步,越来越多的人开始关注航空运输的安全性。北京飞机维修工程有限公司杭州分公司浙江杭州 310000 摘要:随着经济发展的进步,我国在对航空工业也取得了很大的进步,越来越多的人开始关注航空运输的安全性。本文针对空客A320s 飞机前轮转弯在直线滑行过程中,出现较大的偏移问题,进行故障分析,提出解决故障的方法,以及防范建议,保障飞机平稳降落。 关键词:空客A320s飞机;转弯系统;排故分析 飞机前轮转弯控制系统使飞机在高速滑行时保持安全平稳,一旦前轮转弯系统出现故障轻则造成延误停场,重则可能导致灾难性事故。需要了解前轮转弯的工作原理,对空客A320s飞机前轮转弯系统进行排故分析寻找造成前轮转弯发生非指令性偏移的原因,采取解决方法维持飞机前轮转弯系统的安全与稳定[1]。 1前轮转弯故障现象 A320S机队在航线运行中多次出现飞机直线滑行时,前轮出现较大的偏移情况,引起前轮偏移的原因也较为复杂。在一次某A320s飞机又在地面滑行时,前轮右偏约3.5个单位,维修人员检查前轮外观,并没有发现轮胎异常磨损的情况,胎压差值也处于正常范围,观察飞机前架构正常。随后对飞机液压系统增压,转弯定中后发现前轮出现一定偏移,基于此项检测,维修人员初步怀疑前轮偏移的原因是前轮转弯的执行部件伺服控制器6GC有内漏,然后更换控制器,前轮偏移由3.5个单位减少到2.5个单位,但是偏移故障仍没彻底解除。经过维修人员的反复检查与分析,最终发现A320s飞机的方向舵左右脚蹬不在同一水平线,按照调节标准将方向舵脚蹬和偏转值都调节在要求范围内,彻底解决前轮偏移的故障。设想如果在排除初期就合理使用刹车与转弯控制组件的排故数据,将会很大程度上提高排故效率。 2前轮转弯工作分析 2.1前轮转弯工作原理 前轮转弯是一个由电控液压作动的闭环系统,转弯手轮带有4个电位计,在前轮转弯工作中,手轮将位置信号输送至刹车与转弯控制组件,脚蹬信号先传送至升降舵副翼控制计算机,再经过处理送至刹车与转弯控制组件,刹车与转弯控制组件将收手轮和脚蹬的转弯信号处理后输送给控制伺服控制器,而后控制器的信号会转换成液压信号,通过电磁阀和伺服活门作动。 控制器6GC与转弯作动筒两端的液压腔体相连接,转弯作动筒内部活塞杆的齿条移动使旋转支柱做周向运动。上下扭力臂组件与前轮轮轴相连接构成旋转支柱,前轮的转弯是由于轮轴出现偏转。在前架上装传3GC感器用于控制前轮转弯角度信号,安装4GC传感器用于监控信号[2]。 2.2转弯的控制方式 (1)转弯手轮控制 飞机以低于80knots的速度在地面滑行,转弯角度控制在正负74°,正副驾驶位手轮的输入信号为代数叠加,手轮最大转弯角度范围在正负75°。方向舵控制飞机在地面滑行时的速度要低于130knots,可控制转弯角度为正负6°,只能小幅度的调整飞机前进方向。(2)前轮定中方式 采用前架定中的方式转弯有两种,一是在前架减震支柱完全伸长时,前起落架内部上端和下端有一对凹凸轮自动咬合,实现前起落架的机械定中;另一种是前架减震支柱压缩时,3GC传感器给前轮转弯液压控制组件6GC提供0度位置,由控制控制器执行定中。 3前轮转弯故障分析 3.1指令机构造成的偏转 前轮转弯指令构建复杂,有刹车与转弯控制组件、升降舵副翼控制计算机,转弯手轮、脚蹬五项部件,在飞机滑行过程中,任何一处部件出现故障或功能下降,都会产生错误的转弯指令信号,导致飞机前轮转弯出现控制范围内的偏移,反馈传感器点解不正确,造成传感器不能正确的反映前轮实际角度,飞机也会出现滑偏现象。 3.2执行机构造成的偏转 飞机的两个前轮胎磨损情况严重,或者是两个前轮胎压压值相差过大,导致飞机滑偏;飞机前起落架与扭力臂之间的空隙过大,使前轮在转弯的时候大幅度摇摆,造成飞机滑行偏移;前起落架转弯作动筒内的活塞杆齿条和与其啮合的旋转支柱上的齿条有损坏,啮合间隙过大,使得转弯角度无法控制在要求内,飞机发生滑偏。6GC控制器内伺服活门出现问题造成内漏,如果没有输入转弯指令,便无法保持活塞两端压力,造成飞机前轮发生偏转[3]。 3.3主轮刹车故障造成的偏转 主起架落在一侧,或者因为系统某部分出现故障,产生非指令性的刹车,引起飞机左右主起落架与地面摩擦力不一致,飞机在侧向力作用下发生偏移。 4故障处理方式 当收到飞机滑行发生非指令性偏移时,首要任务是收集现场信息,事故发生的机场信息,风向风速信息,了解飞机方向舵平角度。然后根据零部件故障概率手册和技术记录本了解该飞机之前是否发生过同样的滑偏问题。检查顺序由简单到复杂,先在MCDU上做系统测试,确认刹车与转弯控制组件工作正常,其次检查飞机两个前轮的磨损情况,胎压差值,前架的结构损伤和主轮的刹车系统是否存在明显故障。检查扭力臂连接螺栓的间隙是否在要求范围之内,通过操作前轮转弯来确信转弯作动筒内的齿轮和活塞齿轮条之间的间隙在合理范围内[4]。 通过零部件故障概手册确定排故方向和侧重点,把前轮转弯手轮和方向舵脚踏设置在中立位,将方向舵归置在0位,增压液压后,对于超出范围的数据按TSM32进行相应的排故工作,调节方向舵脚蹬机构的定中位。造成向舵脚蹬位置不能定中的原因有很多,需要按照手册要求逐步调节,(1)调节飞机操作系统的前部机械控制;(2)调节钢索的长度;(3)调节后补机械控制;(4)调节方向舵角度。 5前轮转弯排故建议 根据飞机前轮转弯工作原理的介绍和相关排故总结,在此面对飞机滑行非指令性便宜故障,可参考以下排故建议:(1)检查飞机前轮磨损程度,两个轮胎之间的胎压差值,前架扭力臂与螺栓的间隙,前架基本结构问题。
MA600前轮转弯系统常见故障分析 飞机在地面运行时,前轮转弯系统对方向的控制发挥着至关重要的作用,一旦出现故障轻则造成延误停场,重则可能导致灾难性事故。所以文章以我院的主力高教机型MA600为研究对象,总结出MA600的常见故障并对故障原因做出简要分析,可大大提高维修人员的排故效率,保证飞行教学工作的顺利进行。 标签:MA600;前轮转弯系统;故障分析 1 MA600前轮转弯系统概述 MA600的前轮转弯系统主要由前轮转弯手轮传动机构、脚蹬操纵转弯机构、前轮转弯电气控制机构、前轮转弯活门、前轮转弯作动筒、电磁开关、节流活门以及安全活门等部件组成。系统由主液压系统提供转弯动力,设有手操纵和脚操纵两种转弯控制方式。 手操纵方式是在飞机滑行时使用,可以使前轮左右偏转45°±2°。手轮传动机构主要由转弯手轮、钢索、滑轮、前轮转弯活门及反馈机构组成,滑行时将中央仪表板上的前轮转弯转换开关扳到“TAXI(滑行)”位置,转动转弯手轮,通过钢索带动滑轮和前轮转弯活门来控制压力油进入转弯作动筒从而驱动前轮左右偏转。 脚操纵方式用于飞机起飞和落地高速滑跑时小角度修正方向,可以使前轮偏转10°±1°。脚操纵转弯机构是硬式传动,由数个摇臂和拉杆组成。使用时将前轮转弯转换开关放置到“TO/LAND(起飞/着陆)”位,蹬踏脚蹬,通过连动的摇臂和拉杆带动转弯活门来控制前轮的偏转。 2 前轮转弯系统故障解析 MA600飞机前轮转弯系统在日常运行中出现的故障主要有三种:转弯操纵无法脱开、转弯操作困难和转弯操作失效。 2.1 转弯操纵无法脱开 MA600飞机在地面拖行和收放起落架时都需要使前轮处于可自由定位的状态,这样一方面是为了在拖行时防止转弯机构受力过大而损坏,另一方面是为了保证收放起落架时前轮可在定中机构的帮助下处于中立位置,避免损坏舱门等部件。如果前轮转弯转换开关置于“OFF”位或者收放起落架时前轮不能实现自由定位,则很可能是出现了转弯操纵无法脱开的故障。 因为MA600前轮的自由定位是通过电磁开关YDF-21B实现的,YDF-21B 是一个常通活门,通电时关闭油路,断电时接通油路。前起落架终点电门、转弯转换开关和YDF-21B组成一个串连控制电路。当转弯转换开关置于“OFF”位或
线控主动转向系统(Direct Adaptive Steering) 出于对运动性能的无限追求,英菲尼迪Q50搭载世界首创的线控主动转向技术,旨在让用户体会到更加淋漓尽致的驾控乐趣。和传统的助力转向相比,该系统的最大特点是就是取消了转向盘和车轮之间的机械连接,车轮转向的速度和角度均由行车电脑根据实际路况和驾驶者的转向力度和速度计算得到。将传统转向系统代之以电信号之后,整个转向系统的反应速度明显提升,此时的英菲尼迪Q50也会表现地更加敏捷而富有活力。同时,因为消除传统系统中使反应速度变慢的机械损耗,英菲尼迪Q50的转向反应更快,并且降低了方向盘的振动。在实现上述功能的同时,线控主动转向系统还带来一定程度的路面反馈,展现了英菲尼迪Q50卓越的运动性能。 这种电控式转向系统的速比几乎可以随意匹配,可以根据车辆的实际行驶工况提供最为合适的转向速比,从而实现了对于车辆的最精准控制,这对于传统机械式转向系统是不可能完成的任务。英菲尼迪的工程为英菲尼迪Q50预设了多种不同的转向模式,可以很舒适也可以很运动,涵盖了大多数驾驶者习惯的驾驶风格。如果感觉还不够过瘾,英菲尼迪Q50的线控主动转向技术系统还为驾驶者准备了一个共有9种选择的个人设定模式,您可以根据个人喜好来获得车辆的驾驶感受。
除此之外,线控主动转向技术由于不采用直接的机械连接,可以帮助阻隔来自路面的复杂反馈传至方向盘,进而减少因路面反馈过于明显造成车辆失控的可能,使全新英菲尼迪Q50得到了最为理想的直线行驶稳定性。为了最大限度地保证线控主动转向技术的可靠性,英菲尼迪为其准备了三个相互监视的ECU控制单元,当其中一个出现问题的时候,其他两个将快速接替其职能,保持车辆操控安全。而若遇到严重故障,致使电控系统无法正常运转的时候,备用的机械助力转向系统将会被激活,确保做到万无一失。 另外,英菲尼迪Q50为驾驶者提供5种驾驶模式,除了常规应用的运动(Sport)、标准(Standard)、经济(Eco),以及个人(Personal)模式外,还增添了雪地(Snow)模式。这一设计,使英菲尼迪Q50可以适应更为复杂的驾驶环境。
空客A320s飞机前轮转弯系统排故经验总结 发表时间:2020-02-03T11:24:43.733Z 来源:《基层建设》2019年第28期作者:龙号洋 [导读] 摘要:经济在快速的发展,社会在不断的进步,我国的科学技术也在不断的发展进步,本文以空客A320s飞机在滑行中发生方向偏移故障为例,通过对前轮转弯系统原理的介绍,结合维护工作中的实际经验,对此类故障进行分析总结并提出排故建议。 北京飞机维修工程有限公司重庆分公司重庆 400000 摘要:经济在快速的发展,社会在不断的进步,我国的科学技术也在不断的发展进步,本文以空客A320s飞机在滑行中发生方向偏移故障为例,通过对前轮转弯系统原理的介绍,结合维护工作中的实际经验,对此类故障进行分析总结并提出排故建议。 关键词:前轮转弯;故障;原理;排故建议 飞机前轮转弯系统是实现飞机地面操纵运动的重要组成部分,其各种性能和指标对飞机整体地面操作的稳定性、地面机动性等都有很重要的影响。因此,针对飞机前轮转弯系统及其控制律的研究尤为关键。国内相关资料对前轮转弯系统有较深入的研究,同时提出了各种控制律来保证系统的各种性能指标,有关资料结合飞机地面运动将前轮转弯角速度最大允许值作为前轮转弯系统指标来保证转弯稳定性。由于传统的执行机构多为线性机构,仅需选取合适额定流量的伺服阀保证流量与转弯角速度匹配,无须对角速度进行闭环控制。而目前应用较普遍的对称液压缸为典型非线性机构,存在转弯临界角,若不采用合适的控制方法,会引起角速度脉冲峰值,恶化系统性能。因此,需引入针对角速度控制的具体方法。传统的PID控制方法在实际的各种系统控制中有着广泛的应用,但由于前轮转弯系统各非线性环节的影响及临界角的存在,传统PID并不能产生较好的效果,且PID参数调节过程繁琐困难。该文给出一种多门限PID控制算法,结果表明,该控制方法即能保证转弯角速度不超过允许值,同时,也未对系统的其他性能指标造成明显影响。 1 前轮转弯基本工作原理 转弯手柄将转弯信号传送给刹车与转弯控制组件(BSCU),脚蹬和方向舵配平控制器的偏转信号通过升降舵副翼计算机(ELAC)传送给BSCU,BSCU通过控制伺服控制器(6GC)内液压油的流向和流速,将从驾驶舱来的转弯指令电信号转换成液压信号,伺服控制器与转弯作动筒的两端液压腔相连,液压油的流向和流速控制着转弯作动筒内活塞移动的方向和速度,活塞杆带有齿轮,与前起落架上旋转柱(rotatingtube)外侧的齿轮相连,可以将转弯作动筒内活塞的直线运动转变成旋转柱的圆周运动,旋转柱通过扭力臂(torquelink)与前轮轴相连,旋转柱的左右转动带动着前轮的左右偏转,实现转弯。系统安装有两个传感器,反馈控制传感器(3GC)和监控传感器 (4GC),它们将前轮转弯的角度反馈给BSCU,前者用于转弯控制,后者用于显示转弯角度。飞机在低速滑行时,使飞机滑行方向发生改变的方式有4种:1)通过驾驶舱内的转弯手柄进行控制(低速时左右74°),这是最常用的方式。2)通过蹬踏脚蹬微调滑行方向,使其左右偏转以实现(低速时左右6°偏转)。3)方向舵配平控制器可以实现滑行方向的微调。4)使用一侧主轮的刹车,让飞机产生偏转力也能使飞机转弯,在前轮转弯系统失效时,机组可以使用这种方法控制飞机转弯。 2 空客A320s飞机前轮转弯系统排故经验总结 2.1 转弯作动模型 转弯作动系统主要包括转弯作动筒和转弯控制阀两部分。转弯作动筒为双出杆对称液压缸。其各组成部分功能如下:(1)伺服阀用于控制压力油的流向和流量,转弯控制阀使用旋转式直接驱动流量伺服阀(RDDV),伺服阀的阀芯位置由转弯控制器根据转弯输入指令和前轮位置反馈传感器指令进行控制,伺服阀阀芯处于不同位置时,压力油进入作动筒的不同腔,推动前机轮向相应方向偏转。(2)电磁阀由电磁铁和阀体两部分组成。电磁阀是两位三通阀,当电磁铁通电时,电磁铁内铁芯在电磁力作用下推动阀芯运动,钢球将上口封闭,下口打开,高压油通过下口进入转换阀,并且另一路高压油进入伺服阀;当电磁铁断电时,高压油顶住钢球封住下口,上口打开通回油。(3)单向阀安装在产品的减摆回路与补偿阀之间,只允许补偿阀内的油液进入减摆回路,而防止减摆回路的油进入补偿阀内。(4)转换阀用于产品在转弯状态和减摆状态之间的转换,当电磁阀不通电时,转换阀的起始位置为减摆工位,沟通作动筒的两腔;当电磁阀通电时,转换阀阀芯被推动后,处于转弯工位,阻断作动筒两腔,并将压力油与RDDV进油口沟通。阀芯是带有许多油路槽的心轴,在凸肩上面加工了许多均压槽;衬套上有许多的通油孔,分别对应不同的油路,在衬套上装有密封圈与氟塑料保护圈,用于分隔高压腔与低压腔. 2.2 故障的一般处理方式 一般情况下当收到飞机滑行发生非指令性偏转时,首先应该收集现场信息,包括故障发生地的机场信息,风向风速信息,并了解机组为了保证飞机不滑偏所调节的方向舵配平角度。再通过阅读PFR和技术记录本,了解飞机之前有无涉及到飞机滑偏的问题。按由简至繁的顺序,先应该在MCDU上做系统测试,确认BSCU工作正常,其次,检查前轮的磨损,胎压,前架的明显结构损伤和主轮的刹车系统的相关故障。然后检查扭力臂连接螺栓的间隙是否在允许的范围内,在通过操作前轮转弯来确信转弯作动筒内的齿轮和活塞齿轮条之间的间隙在合理范围内。如果这些检查都没有发现出问题,就要通过MCDU读取BSCU内的TROUBLESHOOTINGDATA,根据故障代码,再继续明确排故方向和重点,可以设置前轮转弯手轮和方向舵脚蹬在中立位,方向舵配平在0位,增压液压后,通过MCDU上读取BSCU1/2的specificdata-steeringdata。可以读取到SPOTCAP,SPOTFO,ANGCSG和RVDTCOM等数据数据。如果有超出范围的可以按找TSM32-51-00-810-823进行相应的排故工作。脚蹬角度的正常范围是正负0.1度,隔离ELAC1和ELAC2故障后,如果两个BSCU通道都显示脚蹬不在中立位时,可以按照AMM27-21-00-820-003AdjustmentoftheRudderMechanicalControl来进行调节方向舵脚蹬控制机构的定中位。可能导致方向舵脚蹬位置不能定中的原因很多:脚蹬内部的连杆位置不正确,脚蹬钢索不在中立位等等,我们须按照手册要求逐步:(1)调节前部机械控制;(2)调节钢索;(3)调节后部机械控制;(4)调节方向舵定中来隔离,直到手册要求的所有校装销都可以在定位孔中轻松插拔。如果MCDU提供的数据都是正常的,那么需要在前轮下放两层钢板,钢板之间抹上油脂或者顶起前架来确保前轮定中后,读取ISTRSV数据再按手册排故,判断是否需要更换前轮转弯伺服活门(steeringservovalve)。以上都正常的情况下,需要调节位置传感器的电0度位置。这里需要注意的是采用未顶前起落架的方式调节3GC/4GC零位受到前轮与钢板摩擦力等外界因素的影响,可能导致不能真正液压定中。所以建议在处理类似故障时,需严格按照手册要求顶起前起落架机械定中机构定中后再调节3GC/4GC零位。 3 结语 飞机滑行中非指令性的偏转故障是较为常见的机械故障之一,但是前轮转弯系统的很多参数都可以通过MCDU上的BSCU数据读出以方便判读,所以在熟悉系统原理和善于总结故障的基础上,能迅速准确地读取MCDU数据可以事半功倍地完成滑行偏转故障的排除工作。
2009年8月广汽本田全新奥德赛[综述图片论坛]正式在国内发表,在众多先进的设计中,有一项是同类车型中没有的,就是本田精心研发的VGR可变转向比例系统。这一系统使全新奥德赛(报价参数)具有相当敏捷的操控特性,除了本田汽车以外,其实还有宝马、三菱汽车拥有同类技术,目的只有一个,就是提供超乎寻常的驾驶乐趣和操控安全性。 广汽本田全新奥德赛配备了VGR可变转向比例系统 早期汽车的转向机构和卡丁车区别并不大,保持正常直行都很困难。为了能使方向盘可以稳定的控制行驶方向,发明了初级的转向机,使转向柱转动角度与转向角度成一定比例。为了适应各种速度下的合理转向角度,大部分转向柱的转动角度在1080-1440圈,也就是转向轮从极左到极右,方向盘需要转动3-4圈。 转向机按结构分为循环球式和齿轮齿条式,前者比较耐用,但转向反应慢、不直接;后者虽然会在使用时间较长后产生一定噪音,但转向反应很快且直接。后来为了减少驾驶者的操作量,又加入了转向助力系统;为了使转向能适应不同车速的要求,又出现了随速助力转向系统。这些先进技术的加入确实大大降低了驾驶者的负担,但对操控性没有本质的提高,这也是一些注重车辆操控性能的汽车厂家研发新型转向系统的主要原因。
最早致力于主动改善转向特性的当属三菱汽车,三菱Lancer Evolution车系早期车型虽然加速性能超强,但恒时四驱系统加上强大的动力,结果就是严重的转向不足。直到1994
年第四代车型的推出,除了使用重新设计的4G6[综述图片论坛]3涡轮增压发动机以外,最重要的革新就是加入了AYC主动偏航控制系统和ACD主动控制差速器。
AYC的主要原理是通过单独改变后轮两侧的驱动力来抵消转向不足,从而使车辆保持正确的过弯路线,即便方向盘转动角度过大,也不会陷入转向不足,大大提高了超高速过弯的安全性。ACD主要是通过实时改变前、中、后差速器的传动比,起到半自主转向的作用,所以即便是量产的Lancer Evolution也可以做出类似于WRC赛车的夸张动态。全新Evolution X更采用Super AYC与主动转向系统、主动刹车系统和ACD系统相互配合,最终组成S-AWC 超级全轮控制系统,使驾驶变得更得心应手。
科学技术创新2019.19 空客A320s 飞机前轮转弯系统排故经验总结 罗刚 (北京飞机维修工程有限公司成都分公司,四川成都610200) 1前轮转弯故障现象 A320S 机队在运行中多次出现飞机直线滑行时前轮偏移的情况,而引发故障的原因也较为复杂。 如某A320s 飞机在航线运行中机组报告故障:“地面滑行时前轮转弯右偏较大,约3.5个单位”。排故经过:维护人员通过外观检查,确信前轮没有异常磨损和过大的胎压差值,目视检查前架结构正常。随后再通过对液压系统增压,转弯定中后发现前轮有偏转,维修人员初步怀疑为前轮转弯的执行部件伺服控制器6GC 有内漏。更换6GC 后故障现象有所改善(偏转量减少到了2.5个方向舵配平单位),由于故障并没有彻底排除。随后维护人员又反复分析原因,最后发现方向舵左右脚蹬不在同一水平线。于是按照AM M 手册调节方向舵脚蹬前部机械控制和调节钢索,将方向舵脚蹬和偏转值都调节在手册要求范围内,故障最终彻底排除。虽然故障排除了,但如果在初期就合理使用BSCU 的排故数据,将会提高排故的准确性,减少排故时间。 2工作原理分析2.1前轮转弯如图1所示,前轮转弯系统主要部件包括:转弯手轮传输组件、方向舵脚蹬、BSCU 、伺服控制器、位置反馈传感器等。 前轮转弯工作原理:前轮转弯是一个电控液压作动的闭环式控制系统。转弯手轮是一个带4个电位计的传感器,飞机在转弯时,手轮将转弯的位置信号转换成电压信号直接输送至BSCU ,而脚蹬信号则先输送给ELAC ,ELAC 再将信号处理后输送至BSCU ,BSCU 将手轮和脚蹬的转弯信号处理后输送给控制伺服控制器(6GC ),6GC 将转弯的电信号转换成液压信号,通过电磁阀(SOLENOID VALVE )和伺服活门(SERVO-VALVE )作动。6GC 与转弯作动筒两端的液压腔体相连接,液压油的供压和回油方向及流速控制着转弯作动筒内活塞移动方向和速度。转弯作动筒内部活塞杆的齿条(RACK )与旋转支柱(ROTATING TUBE )上的齿条相啮合,齿条的移动使旋转支柱做周向运动。由于旋转支柱通过上下扭力臂组件与前轮轮轴相连接,前轮随着轮轴左右偏转,从而实现飞机的转弯。 在前架上装有两个位置传感器(3GC 、4GC )。3GC 用于前轮转弯角度信号的控制,4GC 用于信号的监控。3GC 直接与转弯作动筒内齿轮盒相连接,将实际位置信号转换成电压值反馈给BSCU 。传感器内由减速齿轮组件和RVDT 构成,并带有微调蜗杆螺钉:用于在位调节传感器的“电0度位置”。所以,我们可以通过对3GC 压差的调节,来实现对前起落架“零”位定中的调 节; 4GC 的构造与3GC 相同,其信号只提供给BSCU 作为监控,以及前轮转弯伺服活门的控制。 2.2转弯的控制方式2.2.1转弯手轮控制飞机在地面滑行时(速度≤80knots ),可控制转弯角度为±74°。正副驾驶位手轮的输入信号为代数叠加,且手轮最大转弯角度为±75°。 2.2.2方向舵(脚蹬)控制飞机在地面滑行时(速度≤130knots ),可控制转弯角度为±6°,只能对飞机前进方向的微调。 2.3前轮定中方式 前架定中的方式有以下两种: 第一种是前起落架内部上端和下端有一对凹凸轮,在前架减震支柱完全伸长时这一对凹凸轮自动咬合实现前起落架的机械定中定中。 第二种是前架减震支柱压缩时,转弯角度传感器(3GC )提供电“0度位置”信号给前轮转弯液压控制组件6GC 来执行定中。 3故障分析 引起A320s 滑行中非指令性方向偏转的的因素有多方面。 摘要:本文以空客A320s 飞机在滑行中发生方向偏移故障为例,通过对前轮转弯系统原理的介绍,结合维护工作中的实际 经验,对此类故障进行分析总结并提出排故建议。 关键词:前轮转弯;故障;原理;排故建议中图分类号:V22文献标识码:A 文章编号:2096-4390(2019) 19-0022-02图1前轮转弯的工作原理图 22--
汽车主动转向系统设计及控制特性研究 发表时间:2020-01-13T16:59:54.047Z 来源:《基层建设》2019年第28期作者:鲍培兴 [导读] 摘要:随着汽车性能的逐渐提升,人们对汽车驾驶过程中的稳定性、安全性和操作灵活性提出了更高的要求,因此,在汽车研究的过程中,必须要保证汽车的相关性能满足人们对汽车越来越高的要求,而汽车主动转向系统的应用不仅能够保证汽车具备一定的操作灵活性,还能够保证汽车在驾驶的过程中具备良好的稳定性和安全性,所以探究汽车主动转向系统的设计流程,如何能够更好的对汽车主动转向系统进行控制,是当前汽车转向系统设计相关负 长城汽车股份有限公司河北省汽车工程技术研究中心河北保定 071000 摘要:随着汽车性能的逐渐提升,人们对汽车驾驶过程中的稳定性、安全性和操作灵活性提出了更高的要求,因此,在汽车研究的过程中,必须要保证汽车的相关性能满足人们对汽车越来越高的要求,而汽车主动转向系统的应用不仅能够保证汽车具备一定的操作灵活性,还能够保证汽车在驾驶的过程中具备良好的稳定性和安全性,所以探究汽车主动转向系统的设计流程,如何能够更好的对汽车主动转向系统进行控制,是当前汽车转向系统设计相关负责人员的主要责任和义务。基于此,本文通过分析汽车主动转向系统的相关概念,探究如何进行更好的设计和控制,从而提高人们驾车过程中的安全性和稳定性。 关键词:汽车;主动;转向系统;设计;控制特性 引言:汽车主动转向系统的设计是基于智能化技术和机械技术应用下发展出来的汽车智能化系统,通过这一系统的设置,可以保证驾车的舒适性,在一定程度上提升了车辆的整体实用性能。由于传统的转向系统不具备主动性,汽车在速度较低进行转向的过程中,需要驾驶人员转向的幅度相对较大,而在高速进行转向的过程中,由于转向的灵敏度增加,所以导致驾驶员给予很小的转动动作,就可以保证转动的角度相对较大,从而使整个汽车的安全性得不到良好的保障,因此传统的汽车转向系统使汽车的使用性能大大降低,并且也不能够保证驾驶人员和车内其他乘客的安全,所以,在汽车中设置主动转向系统是当前改善汽车性能的重要措施。 一、主动转向系统与传统转向系统相比具备的优点 与传统的转向系统相比,智能主动转向系统具备的优点主要体现在以下几个方面,第1个方面是由于传统的转向系统必须驾驶人员实施一定的操作,但是可能会由于驾驶人员出现疲劳驾驶或者分神的现象,在应该转向时没有进行转向操作,从而引起交通事故以及危害人身安全。而主动转向系统可以根据驾驶的实际情况保证转向系统在应该转向时进行转向操作,从而在一定程度上增加了驾车的安全性。同时两种转向系统在转动角度方面的对比也体现出了主动转向系统的优势,例如在低速行驶的过程中,传统转向系统的转动方向与方向盘的转动方向不一致会增大转动的角度,而主动传动系统中方向盘的转动方向和转动电机的转动方向基本一致,所以,可以在一定程度上减小转动的角度。在高速行驶时,由于传统转动电机的方向和方向盘的方向一致,所以方向盘转动的幅度较小时,汽车转动的角度也相对较大,因此增加了危险性,而主动转动系统中,转动电机的方向在高速行驶时会和方向盘的转动方向不一致,从而在一定程度上增加了操作人员,转动方向盘的转动角度,因此也间接的提升了汽车的行驶安全性。第2个方面是主动式转向系统和传统的转向系统相比在纠正转动方向时也有一定的优势,例如主动式转向系统,能够保证汽车在直线行驶的过程中可以更加稳定,并且通过计算的方式计算出相应的车速,以及通过车轮上的传感器可以监测到车辆上的转向轮是否具备一定的稳定性,而传统的转向系统必须人为设置相应的传动方向,并且还需要根据行车经验判断车辆的转动角度,从而在一定程度上降低了车辆行驶的安全性。总而言之,主动转向系统与传统转向系统相比,不仅能够保证汽车具备一定的安全性和稳定性,还能够帮助驾驶人员进行危险的判定,从而保证驾驶人员的安全。 二、汽车主动转向系统的设计 要想明确汽车主动转向系统的实际设计方案,必须要了解汽车主动转向系统所包含的结构以及实际的工作原理,当前汽车主动转向系统所包含的关键组成结构有转向盘,转距传感器,转向输入轴以及配备涡轮蜗杆的双行星齿轮系和助转角电机,及转向拉杆等。同时在转向的过程中,为了保证能够实现智能化,还配备了车身动态测试信号,车身中的运动状态不在正常范围以内,将通过测试信号传输到转距传感器和转向盘上。在汽车主动转向系统的设计过程中,除了要明确转向系统中所需要的所有零部件的型号和类型以外,还需要明确这些零部件在主动转向系统中具备的功能,例如转向盘是让驾驶员可以通过转向盘的操作,实现汽车车身的转动以及车轮的转动,而ECU电控单元可以实现汽车车速的收集以及转动角度的收集,然后将这些信号传输给转向控制系统中,从而保证转向盘能够实现自动转动,并且提示驾驶人员进行转动操作。在转动系统中还添加了助转角电机,转角电机的作用是一旦转向传输系统出现问题,助转角电机可以帮助转向盘能够提供更好的转向性能,从而使操作的灵敏度提高,可以在一定程度上保护驾驶员的安全。在汽车主动转向系统设计的过程中,主要分为两部分,首先是主设计部分,主设计部分包括方向盘操纵的机构,主动转向的电机机构以及双行星齿轮机构和齿条机构减速机机构等,还有一些配合主动转向系统的零部件,例如车速传感器,ECU等。 三、汽车主动转向系统控制特性分析 汽车主动转向系统控制特性分析的过程中首先要明确,汽车主动转向系统的控制性能需要达到什么要求。当前我国汽车主动转向系统应该达到的要求首先是需要在转向时具有可靠的操作性能。例如在汽车进行高速行驶的过程中,如果会出现急转弯现象,需要保证驾驶员在操作转向系统时,能够通过主动转向系统及时的将车辆进行急转弯操作,并且还要保证汽车在直线行驶的过程中,即使遇到了大风等恶劣天气,也可以通过主动转向系统控制车辆的直线行驶。其次是要保证主动转向系统,可以比传统转向系统有更快的反应能力,例如驾驶员在驾驶汽车的过程中,如果前方发生了紧急情况需要进行急转弯操作时,必须要保证主动转向系统能够控制整个汽车进行急转弯操作,并且还要保证其能够快速的操控汽车进行急转弯。然后是要保证主动转向系统中的转向助力系统,可以根据车速的变化及时的进行转变,从而保证主动转向系统具备一定的灵活性,同时转向助力系统是保证能够帮助驾驶人员操控汽车转弯的系统,因此转向助力系统也需要具备一定的灵敏性和轻便性。最重要的是要保证主动转向系统具备良好的稳定性,一旦主动转向系统在控制汽车转弯的过程中不具备稳定性,可能造成汽车事故频发,从而严重的影响人们的身心健康。因此保障主动转向系统可以在提高控制特性的前提下,具备一定的稳定性,是当前主动转向系统发展的主要方向。在控制特性分析时,首先要确保主动转向系统中的电机能够有良好的运行状态,电机是为主动转向系统提供操作和控制的器件,所以,在探究控制特性时,要研究电机是否具备良好的运转性能。当前,在提升电机控制特性时,采用的主要方式是使用PID控制系统,利用这种系统可以提高电机的抗干扰能力和提升相应的反应灵敏度。 结束语 随着社会的不断发展,人们对汽车性能的要求越来越高,但是由于现阶段汽车在驾驶的过程中可能会有危险事故的发生,因此不断提
汽车转向系统工作原理 我们知道,当转动汽车方向盘时,车轮就会转向。为了使车轮转向,方向盘和轮胎之间发生了许多复杂的运动。最常见的汽车转向系统的工作原理包括:齿条齿轮式转向系统和循环球式转向系统。 当汽车转向时,两个前轮并不指向同一个方向。 要让汽车顺利转向,每个车轮都必须按不同的圆圈运动。由于内车轮所经过的圆圈半径较小,因此它的转向角度比外车轮要大。如果对每个车轮都画一条垂直于它们的直线,那么线的交点便是转向的中心点。转向拉杆具有独特的几何结构,可使内车轮的转向角度大于外车轮。转向器分为几种类型。今天讲述的的是齿条齿轮式转向。
齿条齿轮式转向系统已迅速成为汽车、小型货车及SUV上普遍使用的转向系统类型。其工作机制非常简单。齿条齿轮式齿轮组被包在一个金属管中,齿条的各个齿端都突出在金属管外,并用横拉杆连在一起。 小齿轮连在转向轴上。转动方向盘时,齿轮就会旋转,从而带动齿条运动。齿条各齿端的横拉杆连接在转向轴的转向臂上(参见上图)。 齿条齿轮式齿轮组有两个作用: ?将方向盘的旋转运动转换成车轮转动所需的线性运动。 ?提供齿轮减速功能,从而使车轮转向更加方便。 在大多数汽车中,一般要将方向盘旋转三到四周,才能让车轮从一个锁止位转到另一个锁止位(从最左侧转到最右侧)。 转向传动比是指方向盘转向程度与车轮转向程度之比。 20度,则转向传动比就等于360除以20,即18:1。比率 越高,就意味着要使车轮转向达到指定距离,方向盘所需 要的旋转幅度就越大。但是,由于传动比较高,旋转方 向盘所需要的力便会降低。 一般而言,轻便车和运动型汽车的转向传动比要小于大型 车和货车。比率越低,转向反应就越快,您只需小幅度 旋转方向盘即可使车轮转向达到指定距离。这正是运动型 汽车梦寐以求的特性。由于这些小型汽车很轻,因此比 率较低,转动方向盘也不会太费力。 有些汽车使用可变传动比转向系统,在此系统中,齿条齿轮式齿轮组的中心与外侧具有不同的齿距(每厘米的齿数)。这不仅能提高汽车转向时的响应速度(齿条靠近中心位置), 还能减少车轮在接近转向极限时的作用力。
主动前轮转向控制技术的现状与发展趋势来源:中国汽车工业信息网发布时间:2009年7月2日 0 引言 在车辆的操纵稳定性控制中,比较常见的是利用纵向控制产生横摆力矩来提高车辆的稳定性,称为直接横摆力矩控制。直接横摆力矩控制常常是以牺牲车辆的部分制动性能为代价,而采用主动转向控制来实现车辆稳定性控制却可以在不影响制动的情况下达到同样的效果,并且其所需要的轮胎力只有制动时的约1/4。在诸如对开路面制动等工况下,主动转向还可以有效地抵消由于不平衡制动力所产生的扰动力矩,保证车辆的稳定行驶。由于具有上述优势,主动转向技术成为当前底盘动力学控制发展的热点之一。 常见主动转向系统有主动前轮转向系统AFS和四轮转向系统(也称为主动后轮转向)。 主动前轮转向是随着线控转向技术的发展而发展起来的一项技术,并且随着宝马的主动转向系统装配实车而进入实用阶段。由于主动前轮转向与传统车辆的结构能够很好兼容,同时对车辆操纵稳定性的提高效果明显,显示出了良好的发展前景,成为转向系统未来发展的主要方向之一。 1 主动前轮转向系统的工作原理 目前可用于乘用车的主动转向系统主要有两种形式:一种是以宝马和ZF公司联合开发的AFS系统为代表的机械式主动转向系统,通过行星齿轮机械结构增加一个输入自由度从而实现附加转向,目前已装配于宝马5系的轿车上,以及韩国的MANDO、美国的TRW、日本的JTEKT公司也有类似产品;另一种是线控转向系统(SWB),利用控制器综合驾驶员转向角输入和当时的车辆状态来决定转向电机的输出电流,最终驱动前轮转动。该系统在许多概念车和实验室研究中已广泛采用,如通用公司的Sequel燃料电池概念车就采用了线控转向技术。 线控转向和机械式主动转向系统最大的区别体现在当系统发生故障时,机械式主动转向系统仍能通过转向盘与车轮间的机械连接确保其转向性能,而线控转向必须通过系统主要零件的冗余设计来保证车辆的安全性。由于上述安全性和可靠性的原因,目前法律上还不允许将线控转向系统直接装备车辆。 1.1 机械式主动转向系统 下面以宝马的AFS系统为例,介绍机械式主动转向系统的结构和工作原理。该系统主要由三大子系统组成:液压助力齿轮齿条动力转向系统、变传动比执行系统和电控系统。系统原理图如图1所示。