图1 经简化的一对空链节模型 二、仿真分析 1.运动状态与干涉校验 首先必须考虑到链条柔度对运动的干涉影响,即考虑到在设计的平面柔度和扭转柔度范围内,长链条和最图2 链式输送机构的仿真模型图3 链式输送机构的运动仿真图4 链节的空间位移曲线 CAD/CAM与制造业信息化?www.icad.com.cn
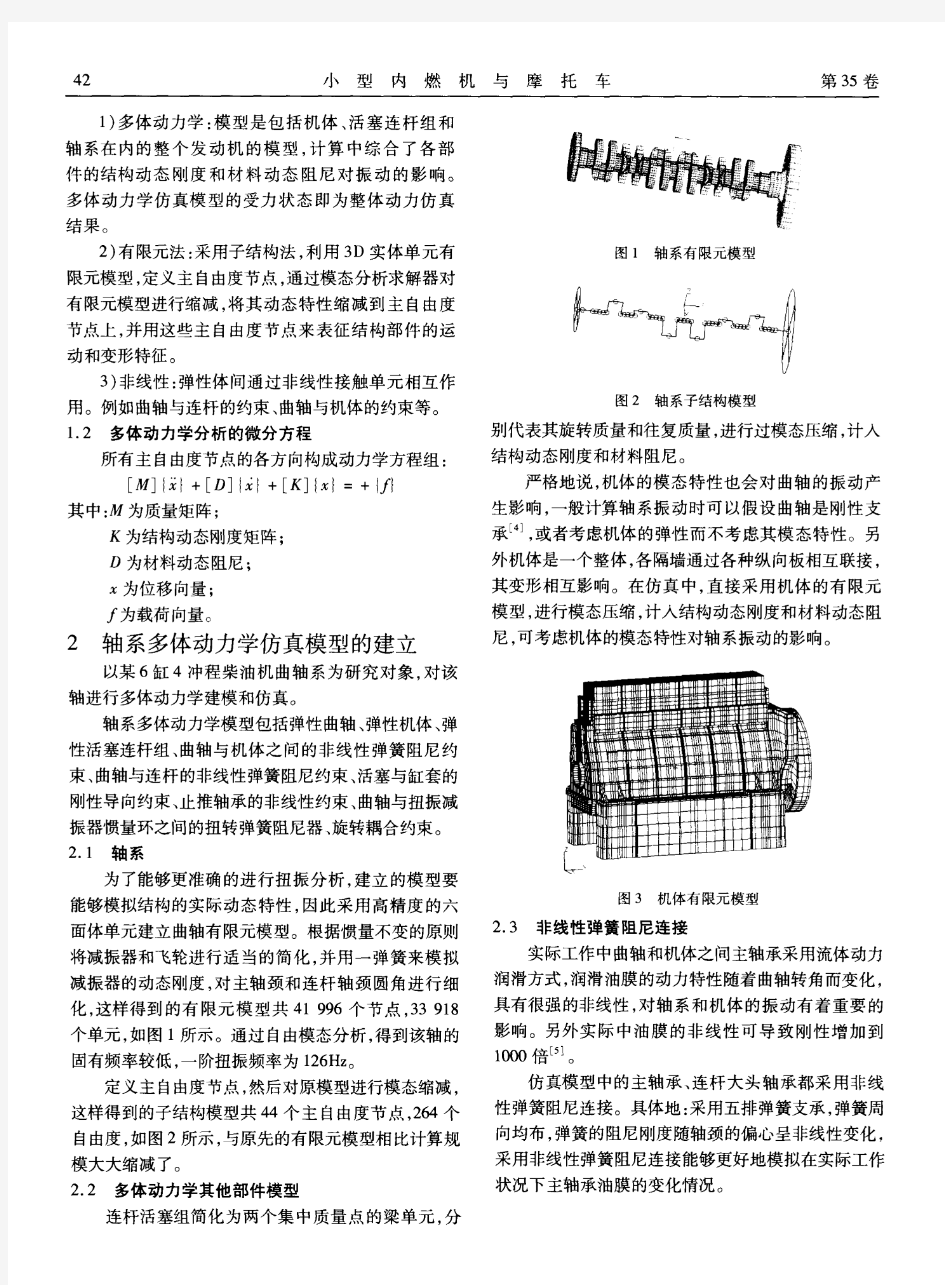
图5 冲击动载荷分析 3.运动平稳性分析 由于链式输送模型中含有多种非线性因素,采用完全递归算法,对各链节的各自由度运动幅值的敛散性进行分析,来判定链式输送系统的运动平 图6 加速度响应 4.抱紧力分析 抱紧臂的抱紧力设计也十分重要, 该值越大,抱紧传输体越可靠,但装卸 传输体就困难了;另一方面,从链节中 脱出传输体将消耗过多的能量,对其 他的相关机构工作不利。若该值较低, 则容易使传输体在输送过程的剧烈抖 动中掉落,产生故障,因此需要进行抱 紧臂的抱紧力动态载荷分析,分析结 果如图7所示。 图7 动态载荷分析 三、结束语 本文应用RecurDyn多体动力学软 件,在导入原有实体模型的基础上,快 速构建仿真模型。根据RecurDyn提供 的多级子系统建模、空间多接触和完 全递归算法等特有功能,对复杂链式 输送机构的分析问题进行了动力学仿 真,得到了做为设计参考的动力学参 数,为链式输送机构的动力学设计提 供了很好的设计校验方法。仿真结果 可以检测输送系统工作的平稳性和可 靠性,并预测链式输送机构故障的发 携手济钢机制公司,WIT-CAPP续写业界辉煌 近日,华特软件与济钢集团机械设备制造公司 公司”)正式签订CAPP合同。 秉承“可遵、可信、共赢”的济钢机制公司是济南钢铁集团直属的子 CAD/CAM与制造业信息化?www.icad.com.cn
| 论坛社区 《机械系统动力学仿真分析软件》(MSC.ADAMS.2005.R2)R2 资源分类: 软件/行业软件 发布者: Coolload 发布时间: 2005-12-18 20:22 最新更新时间: 2005-12-19 07:04 浏览次数: 14548 实用链接: 收藏此页 eMule资源 下面是用户共享的文件列表,安装eMule后,您可以点击这些文件名进行下载 [机械系统动力学仿真分析软件].[$u]MSC.ADAMS.2005.R2.rar201.2MB [机械系统动力学仿真分析软 295.4MB 件].MSC_ADAMS_V2005_ISO-LND-CD1.iso [机械系统动力学仿真分析软185.0MB
件].MSC_ADAMS_V2005_ISO-LND-CD2.bin [机械系统动力学仿真分析软 6.5KB 件].Msc.Adams.v2005.Iso-Lnd-Cd1-Crack.rar 全选480.4MB eMule主页下载eMule使用指南如何发布 中文名称:机械系统动力学仿真分析 软件 英文名称:MSC.ADAMS.2005.R2 版本:R2 发行时间:2005年12月15日 制作发行:美国MSC公司 地区:美国 语言:英语 简介: [通过安全测试] 杀毒软件:Symantec AntiVirus 版本: 9.0.0.338 病毒库:2005-12-16 共享时间:10:00 AM - 24:00 PM(除 非线路故障或者机器故障) 共享服务器:Razorback 2.0 [通过安装测试]Windows2000 SP4 软件版权归原作者及原软件公司所 有,如果你喜欢,请购买正版软件
车辆动力学主要仿真软件 I960年,美国通用汽车公司研制了动力学软件DYNA主要解决多自由度 无约束的机械系统的动力学问题,进行车辆的“质量一弹簧一阻尼”模型分析。作为第一代计算机辅助设计系统的代表,对于解决具有约束的机械系统的动力学问题,工作量依然巨大,而且没有提供求解静力学和运动学问题的简便形式。 随着多体动力学的谨生和发展,机械系统运动学和动力学软件同时得到了迅速的发展。1973年,美国密西根大学的N.Orlandeo和,研制的ADAM 软件,能够简单分析二维和三维、开环或闭环机构的运动学、动力学问题,侧重于解决复杂系统的动力学问题,并应用GEAR刚性积分算法,采用稀疏矩阵技术提高计算效率° 1977年,美国Iowa大学在,研究了广义坐标分类、奇异值分解等算法并编制了DADS软件,能够顺利解决柔性体、反馈元件的空间机构运动学和动力学问题。随后,人们在机械系统动力学、运动学的分析软件中加入了一些功能模块,使其可以包含柔性体、控制器等特殊元件的机械系统。 德国航天局DLF早在20世纪70年代,Willi Kort tm教授领导的团队就开始从事MBS软件的开发,先后使用的MBS软件有Fadyna (1977)、MEDYNA1984),以及最终享誉业界的SIMPAC( 1990).随着计算机硬件和数值积分技术的迅速发展,以及欧洲航空航天事业需求的增长,DLR决定停止开发基于频域求解技术的MED YN软件,并致力于基于时域数值积分技术的发展。1985年由DLR开发的相对坐标系递归算法的SIMPACI软件问世,并很快应用到欧洲航空航天工业,掀起了多体动力学领域的一次算法革命。 同时,DLR首次在SIMPAC嗽件中将多刚体动力学和有限元分析技术结合起来,开创了多体系统动力学由多刚体向刚柔混合系统的发展。另外,由于SIMPACI算法技术的优势,成功地将控制系统和多体计算技术结合起来,发
Assignment Vehicle system dynamics simulation 学院:机电学院 专业:机械工程及自动化 姓名: 指导教师:
The model we are going to analys: The FBD of the suspension system is shown as follow:
According to the New's second Law, we can get the equation: 2 )()(221211mg z z c z z k z m --+-=???? 221212)()(z k mg z z c z z k z m w +-----=? ??? 0)()()()(222111222111=-++--+-++--+? ? ? ? ? ? ? ?w w w w z L z k z L z k z L z c z L z c z m χχχχ 0)()()()(2222111122221111=-++----++---? ? ? ? ? ? ? ?w w w w z L z L k z L z L k z L z L c z L z L c J χχχχχ d w w w w Q z L z k z L z c z m ,111111111)()(-=------? ? ? ? ?χχ d w w w w Q z L z k z L z c z m ,222222222)()(-=-+--+-? ????χχ When there is no excitation we can get the equation: 2)()(221211mg z z c z z k z m --+-=???? 2 21212)()(z k mg z z c z z k z m w +-----=? ??? Then we substitude the data into the equation, we write a procedure to simulate the system: Date: ???? ?? ??? ??==?==?===MN/m 0.10k m 25.1s/m kN 0.20MN/m 0.1m kg 3020kg 2100kg 3250w 2l c k I m m by w b
系统动力学模型介绍 1.系统动力学的思想、方法 系统动力学对实际系统的构模和模拟是从系统的结构和功能两方面同时进行的。系统的结构是指系统所包含的各单元以及各单元之间的相互作用与相互关系。而系统的功能是指系统中各单元本身及各单元之间相互作用的秩序、结构和功能,分别表征了系统的组织和系统的行为,它们是相对独立的,又可以在—定条件下互相转化。所以在系统模拟时既要考虑到系统结构方面的要素又要考虑到系统功能方面的因素,才能比较准确地反映出实际系统的基本规律。系统动力学方法从构造系统最基本的微观结构入手构造系统模型。其中不仅要从功能方面考察模型的行为特性与实际系统中测量到的系统变量的各数据、图表的吻合程度,而且还要从结构方面考察模型中各单元相互联系和相互作用关系与实际系统结构的一致程度。模拟过程中所需的系统功能方面的信息,可以通过收集,分析系统的历史数据资料来获得,是属定量方面的信息,而所需的系统结构方面的信息则依赖于模型构造者对实际系统运动机制的认识和理解程度,其中也包含着大量的实际工作经验,是属定性方面的信息。因此,系统动力学对系统的结构和功能同时模拟的方法,实质上就是充分利用了实际系统定性和定量两方面的信息,并将它们有机地融合在一起,合理有效地构造出能较好地反映实际系统的模型。 2.建模原理与步骤
(1)建模原理 用系统动力学方法进行建模最根本的指导思想就是系统动力学的系统观和方法论。系统动力学认为系统具有整体性、相关性、等级性和相似性。系统内部的反馈结构和机制决定了系统的行为特性,任何复杂的大系统都可以由多个系统最基本的信息反馈回路按某种方式联结而成。系统动力学模型的系统目标就是针对实际应用情况,从变化和发展的角度去解决系统问题。系统动力学构模和模拟的一个最主要的特点,就是实现结构和功能的双模拟,因此系统分解与系统综合原则的正确贯彻必须贯穿于系统构模、模拟与测试的整个过程中。与其它模型一样,系统动力学模型也只是实际系统某些本质特征的简化和代表,而不是原原本本地翻译或复制。因此,在构造系统动力学模型的过程中,必须注意把握大局,抓主要矛盾,合理地定义系统变量和确定系统边界。系统动力学模型的一致性和有效性的检验,有一整套定性、定量的方法,如结构和参数的灵敏度分析,极端条件下的模拟试验和统计方法检验等等,但评价一个模型优劣程度的最终标准是客观实践,而实践的检验是长期的,不是一二次就可以完成的。因此,一个即使是精心构造出来的模型也必须在以后的应用中不断修改、不断完善,以适应实际系统新的变化和新的目标。 (2)建模步骤 系统动力学构模过程是一个认识问题和解决问题的过程,根据人们对客观事物认识的规律,这是一个波浪式前进、螺旋式上升的过程,因此它必须是一个由粗到细,由表及里,多次循环,不断深化的过程。系统动力学将整个构模过程归纳为系统分析、结构分析、模型建立、模型试验和模型使用五大步骤这五大步骤有一定的先后次序,但按照构模过程中的具体情况,它们又都是交叉、反复进行的。 第一步系统分析的主要任务是明确系统问题,广泛收集解决系统问题的有关数据、资料和信息,然后大致划定系统的边界。 第二步结构分析的注意力集中在系统的结构分解、确定系统变量和信息反馈机制。 第三步模型建立是系统结构的量化过程(建立模型方程进行量化)。 第四步模型试验是借助于计算机对模型进行模拟试验和调试,经过对模型各种性能指标的评估不断修改、完善模型。 第五步模型使用是在已经建立起来的模型上对系统问题进行定量的分析研究和做各种政策实验。 3.建模工具 系统动力学软件VENSIM PLE软件 4.建模方法 因果关系图法 在因果关系图中,各变量彼此之间的因果关系是用因果链来连接的。因果链是一个带箭头的实线(直线或弧线),箭头方向表示因果关系的作用方向,箭头旁标有“+”或“-”号,分别表示两种极性的因果链。
1、梯形速度曲线 A=0.5,V=2 if(time-2:0,0,if(time-6:0.5,0.5,if(time-14:0,0,if(time-18:-0.5,-0.5,0)))) A=181.891d,V=2 if(time-2:0,0,if(time-6:-181.891d,-181.891d,if(time-14:0,0,if(time-18:181 .891d,181.891d,0)))) A=181.891d,V=2 if(time-2:0,0,if(time-6:-181.891d,-181.891d,if(time-14:0,0,if(time-18:181 .891d,181.891d,0)))) 2、简化5段S型速度曲线 A=0.5,V=1 if(time-2:0,0,if(time-4:-0.25*time+0.5,0.5,if(time-6:-1.5+0.25*time,0,if(ti me-14:0,0,if(time-16:-3.5+0.25*time,-0.5,if(time-18:-0.25*time+4.5,0,0)) )))) A=0.5=181.891d,V=1 if(time-2:0,0,if(time-4:-181.891d/2*time+181.891d,-181.891d,if(time-6:-3*181.891d+181.891d/2*time,0,if(time-14:0,0,if(time-16:-7*181.891d+1 81.891d/2*time,-181.891d,if(time-18:-181.891d/2*time+9*181.891d,0, 0)))))) A=1,V=2 if(time-2:0,0,if(time-4:-0.5*time+1,1,if(time-6:-3+0.5*time,0,if(time-14:0 ,0,if(time-16:-7+0.5*time,-0.5,if(time-18:-0.5*time+9,0,0))))))
柔性多体动力学建模 、仿真与控制 近二十年来,柔性多体系统多力学(the dynamics of the flexible multibody systems)的研究受到了很大的关注。多体系统正越来越多地用来作为诸如机器人、机构、链系、缆系、空间结构和生物动力学系统等实际系统的模型。huston认为: “多体动力学是目前应用力学方面最活跃的领域之一,如同任何发展中的领域一样,多体动力学正在扩展到许多子领域。最活跃的一些子领域是: 模拟、控制方程的表述法、计算机计算方法、图解表示法以及实际应用。这些领域里的每一个都充满着研究机遇。”多柔体系统动力学近年来快速发展的主要推动力是传统的机械、车辆、军械、机器人、航空以及航天工业现代化和高速化。传统的机械装置通常比较粗重,且*作速度较慢,因此可以视为由刚体组成的系统。而新一代的高速、轻型机械装置,要在负载/自重比很大,*作速度较高的情况下实现准确的定位和运动,这是其部件的变形,特别是变形的动力学效应就不能不加以考虑了。在学术和理论上也很有意义。 关于多柔体动力学方面已有不少优秀的综述性文章。 在多体系统动力学系统中,刚体部分: 无论是建模、数值计算、模拟前人都已做得相当完善,并已形成了相应的软件。但对柔性多体系统的研究才开始不久,并且柔性体完全不同于刚性体,出现了很多多刚体动力学中不呈遇到的问题,如: 复杂多体系统动力学建模方法的研究,复杂多体系统动力学建模程式化与计算效率的研究,大变形及大晃动的复杂多体系统动力学研究,方程求解的stiff数值稳定性的研究,刚柔耦合高度非线性问题的研究,刚-弹-液-控制组合的复杂多体系统的运动稳定性理论研究,变拓扑结构的多体系统动力学与控,复杂多体系统动力学中的离散化与控制中的模态阶段的研究等等。柔性多体动力学而且柔性多体动力学的发展又是与当代计算机和计算技术的蓬勃发展密切相关的,高性能的计算机使复杂多体动力学的仿真成为可能,特别是计算机的功
震源车系统动力学模型分析报告 一、项目要求 1)独立完成1个应用Adams 软件进行机械系统静力、运动、动力学分析问题,并完成一份分析报告。分析报告中要对所计算的问题和建模过程做简要分析,以图表形式分析计算结果。 2)上交分析报告和Adams 的命令文件,命令文件要求清楚、简洁。 1K 1 C 2K 2C 3 C 3 K 3 M 1 M 2M 二、建立模型 1)启动admas ,新建模型,设置工作环境。 对于这个模型,网格间距需要设置成更高的精度以满足要求。在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网格(Working Grid )命令。系统弹出设置工作网格对话框,将网格的尺寸(Size)中的X 和Y 分别设置成750mm 和500mm ,间距(Spacing )中的X 和Y 都设置成50mm 。然后点击“OK ”确定。如图2-1所表示。 图 2-1 设置工作网格对话框
2)在ADAMS/View零件库中选择矩形图标,参数选择为“on Ground”,长度(Length)选择40cm高度Height为1.0cm,宽度Depth为30.0cm,建立系统的平台,如图2-2所示。以同样的方法,选择参数“New Part”建立part-2、part-3、part-4,得到图形如2-3所示, 图 2-2 图 2-3创建模型平台 3)施加弹簧拉力阻尼器,选择图标,根据需要输入弹簧的刚度系数K和粘滞阻尼系数C,选择弹簧作用的两个构件即可,施加后的结果如图2-4 图 2-4 创建弹簧阻尼器 4)添加约束,选择棱柱副图标,根据需要选择要添加约束的构件,添加约束后的模型如2-5所示。
A New Solution For Coupled Simulation Of Multi-Body Systems And Nonlinear Finite Element Models Giancarlo CONTI, Tanguy MERTENS, Tariq SINOKROT (LMS, A Siemens Business) Hiromichi AKAMATSU, Hitoshi KYOGOKU, Koji HATTORI (NISSAN Motor Co., Ltd.) 1 Introduction One of the most common challenges for flexible multi-body systems is the ability to properly take into account the nonlinear effects that are present in many applications. One particular case where these effects play an important role is the dynamic modeling of twist beam axles in car suspensions: these components, connecting left and right trailing arms and designed in a way that allows for large torsional deformations, cannot be modeled as rigid bodies and represent a critical factor for the correct prediction of the full-vehicle dynamic behavior. The most common methods to represent the flexibility of any part in a multi-body mechanism are based on modal reduction techniques, usually referred to as Component Mode Synthesis (CMS) methods, which predict the deformation of a body starting from a preliminary modal analysis of the corresponding FE mesh. Several different methods have been developed and verified, but most of them can be considered as variations of the same approach based on a limited set of modes of the structure, calculated with the correct boundary conditions at each interface node with the rest of the mechanism, allowing to greatly reduce the size of system’s degrees of freedom from a large number of nodes to a small set of modal participation factors. By properly selecting the number and frequency range of the modes, as well as the boundary conditions at each interface node [1], it is possible to accurately predict the static and dynamic deformation of the flexible body with remarkable improvements in terms of CPU time: this makes these methods the standard approach to reproduce the flexibility of components in a multi-body environment. Still, an important limitation inherently lies in their own foundation: since displacements based on modal representation are by definition linear, any nonlinear phenomena cannot be correctly simulated. For example, large deformations like twist beam torsion during high lateral acceleration cornering maneuvers typically lead to geometric nonlinearities, preventing any linear solution from accurately predicting most of the suspension’s elasto-kinematic characteristics like toe angle variation, wheel center position, vertical stiffness. One possible solution to overcome these limitations while still working with linear modal reduction methods is the sub-structuring technique [2]: the whole flexible body is divided into sub-structures, which are connected by compatibility constraints preventing the relative motion of the nodes that lie between two adjacent sub-structures. Standard component mode synthesis methods are used in formulating the equations of motion, which are written in terms of generalized coordinates and modal participation factors of each sub-structure. The idea behind it is that each sub-portion of the whole flexible structure will undergo smaller deformations, hence remaining in the linear flexibility range. By properly selecting the cutting sections it is usually possible to improve the accuracy of results (at least in terms of nodal displacements: less accuracy can be expected for stress and strain distribution). Another limitation of these methods is the preliminary work needed to re-arrange the FE mesh, although some CAE products already offer automatic processes enabling the user to skip most of the re-meshing tasks and hence reducing the modeling efforts. An alternative approach to simulate the behavior of nonlinear flexible bodies is based on a co-simulation technique that uses a Multi-body System (MBS) solver and an external nonlinear Finite Element Analysis (FEA) solver. Using this technique one can model the flexible body in the external nonlinear FEA code and the rest of the car suspension system in the MBS environment. The loads due to the deformation of the body are calculated externally by the FEA solver and communicated to the MBS solver at designated points where the flexible body connects to the rest of the multi-body system. The MBS solver, on the other hand, calculates displacements and velocities of these points and communicates them to the nonlinear FEA solver to advance the simulation. This approach doesn’t suffer from the limitations that arise from the linear modeling of the flexibility of a body. This leads to more accurate results, albeit at the price of much larger CPU time. In fact, simulation results are strongly affected by the size of the communication time step between the two solvers: a better accuracy (and more stable solver convergence) can be generally obtained by using smaller time steps which require larger calculation times, as shown also in [3].
系统动力学模型介绍 1、系统动力学的思想、方法 系统动力学对实际系统的构模与模拟就是从系统的结构与功能两方面同时进行的。系统的结构就是指系统所包含的各单元以及各单元之间的相互作用与相互关系。而系统的功能就是指系统中各单元本身及各单元之间相互作用的秩序、结构与功能,分别表征了系统的组织与系统的行为,它们就是相对独立的,又可以在—定条件下互相转化。所以在系统模拟时既要考虑到系统结构方面的要素又要考虑到系统功能方面的因素,才能比较准确地反映出实际系统的基本规律。系统动力学方法从构造系统最基本的微观结构入手构造系统模型。其中不仅要从功能方面考察模型的行为特性与实际系统中测量到的系统变量的各数据、图表的吻合程度,而且还要从结构方面考察模型中各单元相互联系与相互作用关系与实际系统结构的一致程度。模拟过程中所需的系统功能方面的信息,可以通过收集,分析系统的历史数据资料来获得,就是属定量方面的信息,而所需的系统结构方面的信息则依赖于模型构造者对实际系统运动机制的认识与理解程度,其中也包含着大量的实际工作经验,就是属定性方面的信息。因此,系统动力学对系统的结构与功能同时模拟的方法,实质上就就是充分利用了实际系统定性与定量两方面的信息,并将它们有机地融合在一起,合理有效地构造出能较好地反映实际系统的模型。 2、建模原理与步骤 (1)建模原理
用系统动力学方法进行建模最根本的指导思想就就是系统动力学的系统观与方法论。系统动力学认为系统具有整体性、相关性、等级性与相似性。系统内部的反馈结构与机制决定了系统的行为特性,任何复杂的大系统都可以由多个系统最基本的信息反馈回路按某种方式联结而成。系统动力学模型的系统目标就就是针对实际应用情况,从变化与发展的角度去解决系统问题。系统动力学构模与模拟的一个最主要的特点,就就是实现结构与功能的双模拟,因此系统分解与系统综合原则的正确贯彻必须贯穿于系统构模、模拟与测试的整个过程中。与其它模型一样,系统动力学模型也只就是实际系统某些本质特征的简化与代表,而不就是原原本本地翻译或复制。因此,在构造系统动力学模型的过程中,必须注意把握大局,抓主要矛盾,合理地定义系统变量与确定系统边界。系统动力学模型的一致性与有效性的检验,有一整套定性、定量的方法,如结构与参数的灵敏度分析,极端条件下的模拟试验与统计方法检验等等,但评价一个模型优劣程度的最终标准就是客观实践,而实践的检验就是长期的,不就是一二次就可以完成的。因此,一个即使就是精心构造出来的模型也必须在以后的应用中不断修改、不断完善,以适应实际系统新的变化与新的目标。 (2)建模步骤 系统动力学构模过程就是一个认识问题与解决问题的过程,根据人们对客观事物认识的规律,这就是一个波浪式前进、螺旋式上升的过程,因此它必须就是一个由粗到细,由表及里,多次循环,不断深化的过程。系统动力学将整个构模过程归纳为系统分析、结构分析、模型建立、模型试验与模型使用五大步骤这五大步骤有一定的先后次序,但按照构模过程中的具体情况,它们又都就是交叉、反复进行的。 第一步系统分析的主要任务就是明确系统问题,广泛收集解决系统问题的有关数据、资料与信息,然后大致划定系统的边界。 第二步结构分析的注意力集中在系统的结构分解、确定系统变量与信息反馈机制。 第三步模型建立就是系统结构的量化过程(建立模型方程进行量化)。 第四步模型试验就是借助于计算机对模型进行模拟试验与调试,经过对模型各种性能指标的评估不断修改、完善模型。 第五步模型使用就是在已经建立起来的模型上对系统问题进行定量的分析研究与做各种政策实验。 3、建模工具 系统动力学软件VENSIM PLE软件 4、建模方法 因果关系图法 在因果关系图中,各变量彼此之间的因果关系就是用因果链来连接的。因果链就是一个带箭头的实线(直线或弧线),箭头方向表示因果关系的作用方向,箭头旁标有“+”或“-”号,分别表示两种极性的因果链。 a.正向因果链A→+B:表示原因A的变化(增或减)引起结果B在同一方向上发生变化(增或减)。
柔性多体动力学建模、仿真与控制 近二十年来,柔性多体系统多力学(the dynamics of the flexible multibody systems)的研究受到了很大的关注。多体系统正越来越多地用来作为诸如机器人、机构、链系、缆系、空间结构和生物动力学系统等实际系统的模型。huston认为:“多体动力学是目前应用力学方面最活跃的领域之一,如同任何发展中的领域一样,多体动力学正在扩展到许多子领域。最活跃的一些子领域是:模拟、控制方程的表述法、计算机计算方法、图解表示法以及实际应用。这些领域里的每一个都充满着研究机遇。” 多柔体系统动力学近年来快速发展的主要推动力是传统的机械、车辆、军械、机器人、航空以及航天工业现代化和高速化。传统的机械装置通常比较粗重,且*作速度较慢,因此可以视为由刚体组成的系统。而新一代的高速、轻型机械装置,要在负载/自重比很大,*作速度较高的情况下实现准确的定位和运动,这是其部件的变形,特别是变形的动力学效应就不能不加以考虑了。在学术和理论上也很有意义。关于多柔体动力学方面已有不少优秀的综述性文章。 在多体系统动力学系统中,刚体部分:无论是建模、数值计算、模拟前人都已做得相当完善,并已形成了相应的软件。但对柔性多体系统的研究才开始不久,并且柔性体完全不同于刚性体,出现了很多多刚体动力学中不呈遇到的问题,如:复杂多体系统动力学建模方法的研究,复杂多体系统动力学建模程式化与计算效率的研究,大变形及大晃动的复杂多体系统动力学研究,方程求解的stiff数值稳定性的研究,刚柔耦合高度非线性问题的研究,刚-弹-液-控制组合的复杂多体系统的运动稳定性理论研究,变拓扑结构的多体系统动力学与控,复杂多体系统动力学中的离散化与控制中的模态阶段的研究等等。柔性多体动力学而且柔性多体动力学的发展又是与当代计算机和计算技术的蓬勃发展密切相关的,高性能的计算机使复杂多体动力学的仿真成为可能,特别是计算机的功能今后将有更大的发展,柔性多体必须抓住这个机遇,加强多体动力学的算法研究和软件发展,不然就不是现代力学,就不是现代化。 柔性多体系统动力学时多刚体动力学、连续介质力学、结构动力学、计算力学、现代控制理论等构成的一门交叉性、边缘性学科,这门学科之所以能建立和迅速发展是与当代计算机技术的爆炸式发展分不开的。由于近20年来卫星及航天器飞行稳定性、太阳帆板展开、姿态控制、交会对接的需求和失败的教训以及巨型空间站的构建;高速、轻型地面车辆、机器人、精密机床等复杂机械的高性能、高精度的设计要求等,柔性多体系统动力学引起了广泛的兴趣,已成为理论和应用力学的一个极其活跃的领域。
Ansys 多体动力学仿真软件:RecurDYN 介绍 传统的动力学分析软件对于机构中普遍存在的接触碰撞问题解决的远远不够完善,其中包括过多的简化、求解效率低下、求解稳定性差等问题,难以满足工程应用的需要。基于此,FunctionBay Inc.充分利用最新的多体动力学理论,基于相对坐标系建模和递归求解,开发出RecurDyn 软件,具有令人震撼的求解速度与稳定性,成功地解决机构接触碰撞中的上述问题,极大地拓展了多体动力学软件的应用范围。 RecurDyn 不但可以解决传统的运动学与动力学问题,同时是解决工程中机构接触碰撞问题的专家。 特色功能 ? 强健的隐式积分器和混合积分器 ? 相对坐标和递归算法,求解快速稳定 ? 多种接触方式,柔性体的接触碰撞 ? 柔性体分析,包括大变形、非线性 ? 多级子系统 ? 图层管理 ? 完全windows 风格 客户价值 ? 相对坐标系的运动方程,完全递归算法及强健的求解器,使RecurDYN 具有飞驰般的求解速度 ? 完全的基于WINDOWS 开发的软件,操作界面友好,易学易用 ? 装配自动化,大大减少人工工作量,提高了效率 ? 求解稳定可靠,结果令人信服 ? 可在最短的时间内修正设计方案,极大的缩短产品的设计周期 ? 专用工具包,针对特定应用,为用户量身定制 ? Solid,前后处理模块 广州有道科技培训中心 h t t p ://w w w .020f e a .c o m
2D、3D 模型建立;可读取各种CAD 格式的模型文件;可调式的彩色显示功能显示系统/子系统结构,具有子系统模块化功能;提供图层结构管理;模型参数化;灵敏度分析,实验设计分析(DOE);客户化界面;图表;动画;曲线编辑器;数据过滤器;傅立叶变换,多视窗分割显示;可输入外部数据文件。 ? Solver,求解器 完全递归式方程结构;数值运算器DDASSL/IMGALPHA;数值阻尼可适应性自动化,去除数值上的杂讯;可进行批处理运算;可调整CPU 的优先使用权,加速分析执行;内建轮胎/路面力(TIRE)模块;非线性梁、板单元;提供完整的2D/3D(曲面与曲面)接触分析。 ? Belt-Pulley,皮带滑轮系统仿真工具包 子模块 ? 由模块化的皮带和皮带轮构成。拥有皮带滑轮几何形状生成器可生成各种类型的皮带与 滑轮。自动生成系统的装配和皮带与滑轮之间的接触。精确地给出系统在运动过程中的动态特性。 ? Chain,链条系统仿真工具包。可轻松实现链条的装配。装配信息包含了链条系统的全部信息:接触参数、衬套特性、链节数、链节形状及接触力输出信息等。 ? Gear,齿轮系统仿真工具包 多种形式的齿轮库,有正齿轮系、窝型齿轮系、剪型齿轮系等;可任意修改轮廓外型;齿合分析支持2D/3D 接触;以子系统的方式同其它模型进行装配。 ? Flex,柔性系统仿真工具包 读取ANSYS、 I-DEAS、MSC/NASTRAN 等所计算的振动模态,在充分考虑构件的柔性的情况下进行多体系统的仿真,更真实的反映整个系统的动态特性。 ? Control,控制系统仿真工具包 将机械系统模型和控制系统模型有机结合,进行联合设计。利用控制软件如MATLAB/(SIMULINK)书写描述控制系统的控制框图,然后将该控制框图提交给RecurDyn,应用RecurDyn 求解器进行包括控制系统在内的复杂机械系统的同步仿真计算。 ? Linear,模态分析工具包 可将系统的非线性运动和动力学方程线性化,从而快速计算系统的固有频率特征向量和状态空间矩阵,快速了解系统的固有特性。 ? MTT2D/3D,媒体传送仿真工具包 可高效的设计具有复杂组件的媒体传送系统。该工具包使建模过程自动化、部件设计参数化,并自动输出相关设计曲线,提高了仿真效率。对于板形结构,如纸张﹑胶片﹑滚轴和导轨等,提供了轻松的建模方法,并自动定义媒体与滚轴、导轨间的接触。 广州有道科技培训中心 h t t p ://w w w .020f e a .c o m
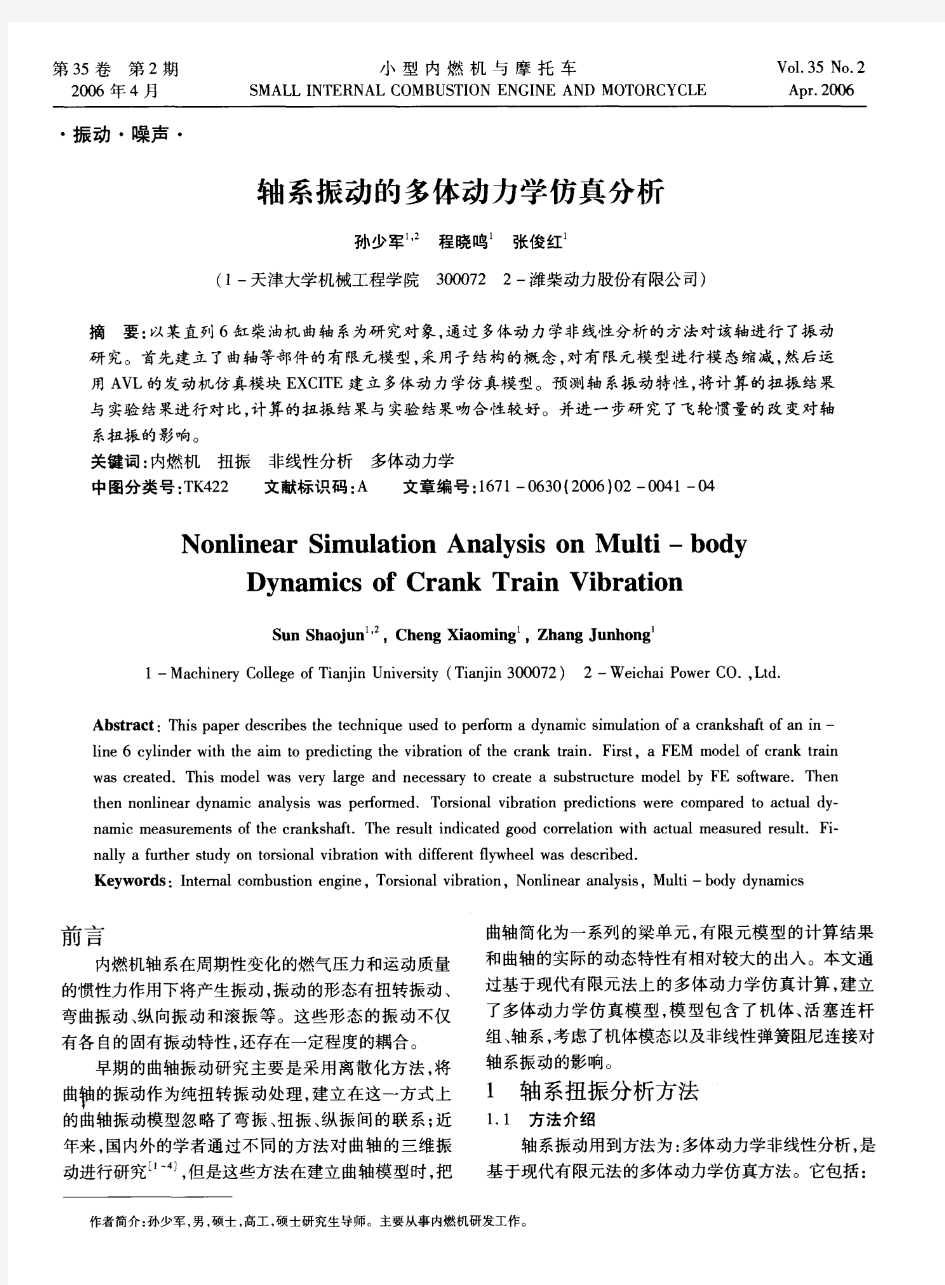
基于RecurDyn的多体动力学仿真 大规模复杂的多体系统动力学问题,尤其是复杂的多接触问题是动力学分析的难点,本文对链式输送机构应用RecurDyn软件,在导入原有实体模型的基础上,快速构建仿真模型,结果另人满意。 产品开发工程师经常会遇到各种运动机构的动力学分析问题,有些情况过于复杂和特殊,特别是一些链式输送机构的动力学仿真问题,整个系统在高速的运动中涉及到的许多接触碰撞等受力情况会给系统的动力学求解带来极大的困难。RecurDyn 是新一代的动力学分析软件,采用全新的运动方程理论和完全递归算法,非常适合于求解大规模复杂的多体系统动力学问题,尤其是复杂的多接触问题。本文对某一形式的链式输送机构借助RecurDyn软件进行了动力学仿真。 一、系统建模 该链式输送机构用于高速间歇状态下传输筒型物体,由于系统的运动主要是在一个平面的运动,因此输送带采用具有旋转约束的链节相互联接而成,链节之间加入扭转弹簧以反映平面内的扭转刚度。每个链节依靠四个抱紧臂弹性固定着传输体,这四个抱紧臂通常可简化成弹性的悬臂曲梁,本例中简化成四个刚性铰接的小爪,并加上涡卷弹簧力,也可以很好地反映出实际情况。机构的运动是通过输链器装置完成的,主要是通过上方拨动齿的往复运动和下方防止链条反向倒退的阻动齿来共同驱动的。由于上方拨动齿的位置尚需精确的定位,故将上方拨动齿的运动简化为水平方向的牵引运动。 仿真模型的建立是在导入原有三维精确实体模型的基础上,用RecurDyn提供的多级子系统建模和空间多接触面定义快速构建出的,如图1、图2所示,并在此基础上添加力、碰撞、运动副等约束条件。由于该机构是高速间歇运动,因此采用一系列分段的时间与运动位移坐标来输入运动参数。
研究生课程论文答题本科目:汽车动力学 授课教师:乔维高 年级专业: 学生姓名: 学生学号: 是否进修生?是□否■
基于SIMULINK 悬架系统动力学仿真分析 (武汉理工大学汽车工程学院) 摘 要:汽车行驶平顺性的优劣直接影响到乘员的乘坐舒适性,并影响车辆动力性和经济性的发挥,是车辆在市场竞争中争夺优势的一项重要性能指标。因而如何最大限度地降低汽车在行驶过程中所产生的振动,成为汽车行业的研究重点。本文以某轿车为例,对其进行力学分析,建立四自由度半振动微分方程,以不同等级路面和不同车速下的随机路面激励谱作为输入,利用Matlab/Simulink 仿真软件建立了动态模型,进行计算机仿真,并分析了动力学参数的改变对汽车行驶平顺性影响。 关键词:悬架系统;平顺性;仿真 Suspension System dynamic simulation analysis Based on SIMULINK Abstract: Car Ride will directly affect occupant comfort and affect vehicle dynamics and economy of the play, is a vehicle to compete for advantage in the market competition is an important performance indicators. So how to minimize vibration during driving cars produced, became the focus of the automotive industry research. Taking a car, for example, its mechanics analysis, four and a half degrees of freedom vibration differential equations, random road pavement and different levels of excitation spectra under different speed as the input, using Matlab/Simulink simulation software to establish a dynamic model for computer simulation and analysis of the changing dynamics of the parameters affecting the car ride comfort. Key words: Suspension System ;riding comfort; dynamic simulation 1 汽车动力学振动模型的建立 四自由度半车模型既能表征车身的质心加速度和速度的变化,又能表征车身绕其质心轴的俯仰角加速度和角速度的变化,结构也不太复杂,因此其仿真结果具有一定的代表性。四自由度半车模型的建立,必须作如下假设:整个系统为线性系统;前轴与前轮质量之和为前簧下质量;后轴与后轮质量之和为后簧下质量;非悬挂分布质量由集中质量块m 1 f 、m 1r 代替,车轮的力学特性简化为一个无质量的弹簧,不计阻尼;汽车对称于其纵轴线,且左、右车辙的不平度函数相等。车身振动的四自由度模型如图1所示。车身质量根据动力学等效的原则分为前轴上后轴上及质心上的三个集中质量m 2 f 、 m 2r 、m 2c ,三个质量由无质量的刚性杆连接。 图1 四自由度汽车模型 1.1 四自由度半车模型自由振动方程 (1)采用 z 2 f 、z 2r 坐标系的自由振动方程 以车身为研究对象,对前、后端取力矩平衡,得: 222221221/L (z z )(z )0f f c c f f f f f f m z m z b K C z ++-+-= (1) 222221221/L (z z )(z z )0r r c c r r r r r r m z m z a K C ++-+-= (2) 式中:z 2f 、z 2r 、z c 、z 1 f 、z 1r 分别表示前、后轴上集中质量、车身质心、前、后轴非悬挂分布质量的垂直振动位移;K 2 f 、 K 2r 分别为前、后轴悬架刚度;C 2 f 、C 2r 是前、后悬架减振器阻尼系数;L 、a 、b 为轴距及质心至前、后轴的距离。 以前、后非悬挂质量为研究对象得: