
汪旭鸿 电子信息 2013141452116 周一下午 宁芊老师
1.1
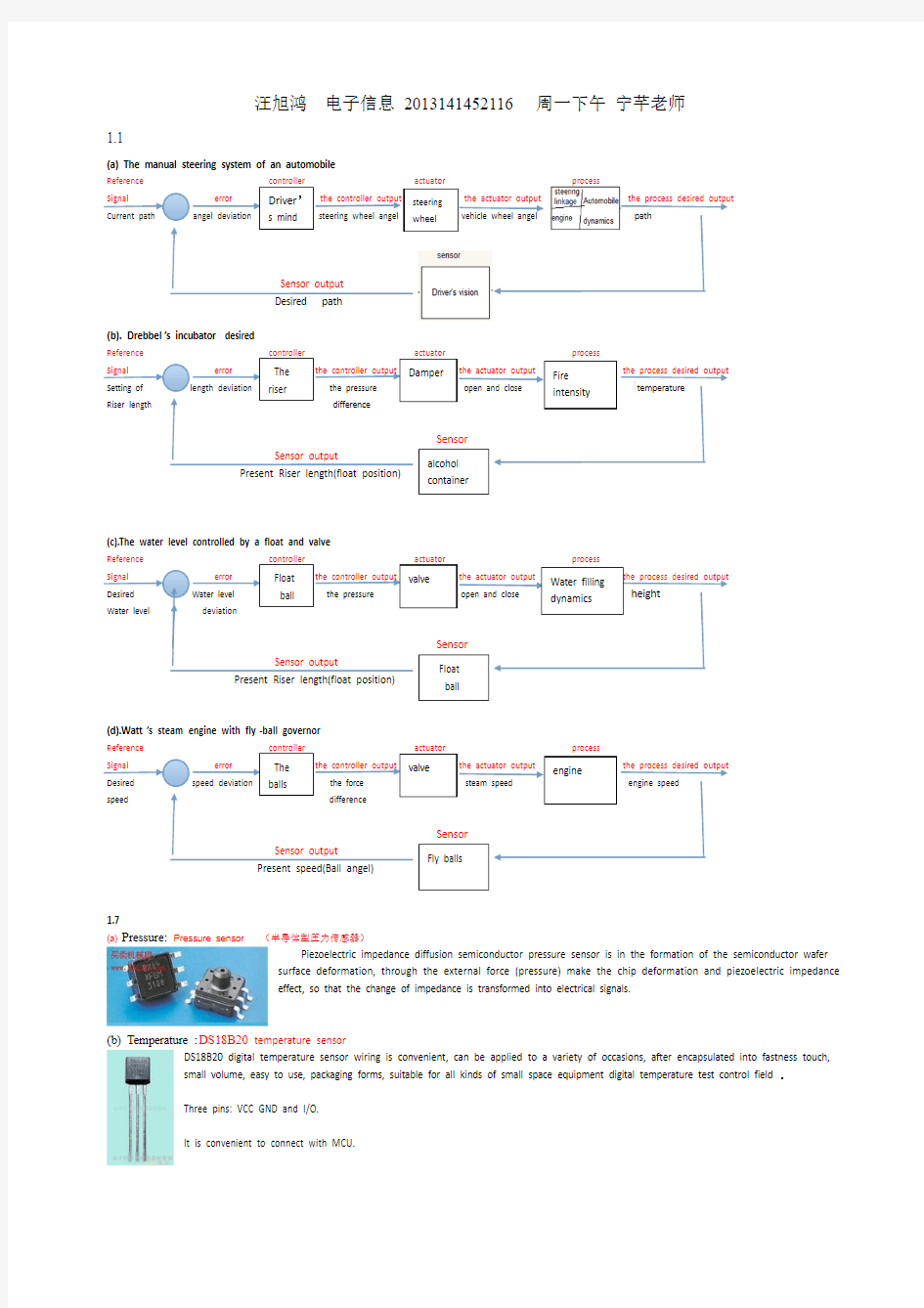
(a) The manual steering system of an automobile
Reference
controller actuator process Signal
error
the controller output the actuator output the process desired output Current path angel deviation steering wheel angel vehicle wheel angel path
Sensor output
Desired path
(b). Drebbel ’s incubator desired
Reference
controller actuator process Signal error the controller output the actuator output the process desired output Setting of length deviation the pressure open and close temperature Riser length difference
Sensor
Sensor output Present Riser length(float position)
(c).The water level controlled by a float and valve
Reference
controller actuator process Signal error the controller output the actuator output the process desired output Desired Water level the pressure open and close height Water level deviation
Sensor
Sensor output Present Riser length(float position)
(d).Watt ’s steam engine with fly -ball governor
Reference
controller actuator process Signal error the controller output the actuator output the process desired output Desired speed deviation the force steam speed engine speed speed difference
Sensor
Sensor output Present speed(Ball angel)
1.7
(a) Pressure: Pressure sensor (半导体型压力传感器)
Piezoelectric impedance diffusion semiconductor pressure sensor is in the formation of the semiconductor wafer
surface deformation, through the external force (pressure) make the chip deformation and piezoelectric impedance
effect, so that the change of impedance is transformed into electrical signals.
(b) Temperature :DS18B20 temperature sensor
DS18B20 digital temperature sensor wiring is convenient, can be applied to a variety of occasions, after encapsulated into fastness touch, small volume, easy to use, packaging forms, suitable for all kinds of small space equipment digital temperature test control field .
Three pins: VCC GND and I/O.
It is convenient to connect with MCU.
Driver ’s mind steering wheel The riser Damper Fire intensity alcohol container Float ball valve Water filling
dynamics Float ball The balls valve engine
Fly balls
(c) Liquid level: photoelectric liquid level transducer (光电水位传感器)
Photoelectric liquid level sensor is by using the reflection of light on the surface of two different medium refraction principle and development of new type of point contact type liquid level measurement and control device. It has simple structure, high positioning
accuracy; There is no mechanical parts, do not need to debug; High sensitivity and corrosion resistance; Less consumption. Small volume,
and many other advantages and gradually recognized by the market.
(d) Flow of liquid along a pipe: Capacitive Drop Sensor (电容液滴传感器)
The Water Sensor module is part of the Grove system. It indicates whether the sensor is dry, damp or completely immersed in water by measuring conductivity. The sensor traces have a weak pull-up resistor of 1 M惟.
The resistor will pull the sensor trace value high until a drop of water shorts the sensor trace to the grounded trace.
Believe it or not this circuit will work with the digital I/O pins of your Arduino or you can use it with the analog pins
to detect the amount of water induced contact between the grounded and sensor traces.
(e) Rotational Position:gravity sensor(Triaxial Accelerometer)
Gravity sensor is working according to the principle of piezoelectric effect. Piezoelectric effect is the so-called "for there is no center of symmetry ionic crystals in crystal on the external force except in the crystal deformation will also
change the crystal polarization state of the electric field are established within the crystals, this happened due to
mechanical force make the medium polarization phenomenon called positive piezoelectric effect". Gravity sensor is to
use the internal crystal deformation due to the acceleration of this feature. As a result of this deformation can
produce voltage, as long as the applied voltage and calculated the relationship between the acceleration and
acceleration can be converted into voltage output.
(f) Linear Position Ultrasonic distance measuring module
The ultrasonic ranging module can process 16 input signals simultaneously.The module has four
interfaces, respectively VCC,Trig,Echo and GND.Trig pin is equivalent to the switch of the module, give a Trig
pin for at least 10 us high level pulse signal, the module can begin to work.At this moment, the module will
automatically from the two "big trumpet" sent eight 40 KHZ square wave, and then automatically detect
whether there is a signal to return.If there is one signal returns, then the module of the Echo port will
output a high level, the duration of the high level, is the time of ultrasonic wave from sent to receive!Do we
need to do is to open the ultrasonic module, which is then sent via ultrasonic Echo know from to time can
receive.
(g) Linear velocity: pulse coder
Encoder (encoder) is converting signals or data preparation, available in the form of communication, signal
transmission and storage of equipment.The encoder angular displacement or linear displacement is converted into
electrical signals, also known as the encoder.We are the most commonly used incremental encoder is converting
displacement into periodic signal, then convert the electrical signals into count pulse, with the size of the
displacement of the number of pulse said.
(h) rotational Speed: MPU6050 gyroscope
Any toothed wheel or gear on a rotating part may be used to trigger a magnetic field
change which can be used to trigger an electrical counting circuit by use of a Hall effect
sensor. The pulses can then be counted over a set time interval to produce angular
velocity(角速度): Tachometer(测速计).
(i).translational Acceleration:
A mass movement restrained by a spring measured by a potentiometer(电压计). A piezoelectric material may be
used instead (通过压电效应来测量加速度). In modern airbags, an integrated circuit chip contains a tiny lever
and .proof mass,whose motion is measured generating a voltage proportional to acceleration.
(j) torque(扭矩):Torque sensor
Torque sensor, divided into two categories: dynamic and static, dynamic torque sensor and speed can be called a
torque sensor, torque sensor, a non-contact torque sensor, rotary torque sensor, etc.Torque sensor is for all kinds
of rotating parts or rotating machinery for torque test of perception.Torque sensor converts a physical change in
the torque signals accurately.Torque sensor can be used in manufacturing viscometer, electric, pneumatic,
hydraulic torque wrench, it has high precision, fast frequency response, good reliability, long service life.
1.8
(a) a torque motor produces force.. N(牛顿)
(b) temperature controlling stove.J(焦耳)
(c) Valve and pump: forcing liquid in or out of the container. N(牛顿)
(d) A valve is normally used to control flow. N(牛顿)
(e) steering engine N*M(牛顿*米)
(f) Electric motor N(牛顿)
(g) Electric motor N(牛顿)
(h) steering engine N*M(牛顿*米)
(i) Translational acceleration is usually controlled by a motor or engine to provide force on the vehicle or other object. N(牛顿)(j) Torque motor. In this motor the torque is directly proportional to the input (current). N*M(牛顿*米)
2010上半年大学英语(3)第2次作业大学英语(三) 第一部分:交际英语(每题3分,共15分) 1. — _____A_______________ — Well, they got there last Wednesday. So about a week. A. How long have your parents been in Paris? B. When did your parents arrive at Paris? C. Did your parents arrive at Paris last Wednesday? D. When will your parents go to Paris? 2. —My mother is pretty sick. —____C______________. A. Good for her. B. Oh, it’s not true. C. That’s too bad. D. Why s 3. — I'd like to say goodbye to everyone. My plane leaves at 7:25. — Well, ______C________________. A. sounds great B. good for you C. goodbye and have a good trip D. it’s emergent 4. — Good morning, sir. Can I help you? — _______B__________. A. Yes, why not? B. Yes, is there a bank near here? C. Are you kidding? D. You are welcome! 5. — Please help yourself to some seafood. — ______D_________. A. No, I can’t. B. Sorry, I can’t help. C. Well, seafood don’t suit. D. Thanks, but I don’t like seafood. 第二部分:阅读理解(每题3分,共30分) Passage 1 A new study suggests that the more teenagers watch television, the more likely they are to develop depression as young adults. But the extent to which TV may or may not be to blame is a question that the study leaves unanswered. The researchers used a national long-term survey of adolescent health to investigate the relationship between media use and depression. They based
一、 设计任务书 设计任务是考虑到飞机的姿态控制问题,姿态控制转换简化模型如图所示,当飞机以4倍音速在100000英尺高空飞行,姿态控制系统的参数分别为: 4,0.1,0.1,0.11 1====a a a K ωεωτ 设计一个校正网络(),s G c 使系统的阶跃响应超调量小于5%,调节时间小于5s (按2%准则)
2、计算机辅助设计 (1)simulink仿真框图 Simulink仿真框图 双击scope显示图像,观察阶跃相应是否达到指标
放大图像观察超调量为s t s p 7.4%,3==σ满足要求 (2)绘制bode 图
校正前的bode图 校正后的bode图
(3)绘制阶跃相应曲线 校正前的阶跃相应曲线 校正后的阶跃相应曲线
三、校正装置电路图 前面为放大装置放大25倍,后面为超前补偿电路,它自身的K 为0.1,相乘之 后为指标中的2.5,校正装置电路完成1 60 ) 16( 5.2++= s s G c 。 四、设计结论 设计的补偿网络为1 60 ) 16( 5.2++=s s G c 。经过仿真得出超调量为s t s p 7.4%,3==σ满足 要求。 五、设计后的心得体会 实际的控制系统和我们在书中看到的标准系统差别很大,参数的要求比书 中要求相对要苛刻,在设计校正网络的过程中,遇到很多困难超前滞后用根轨迹法无法求出,只能用simulink 画出仿真框图,通过经过一定的计算大概确定某些参数,通过不断地尝试修改,才能最终得到满足指标要求的阶跃相应曲线,很多时候现实中的参数没有书中的参数给的那么简单,会遇到很多难以想象的复杂状况,所以我们学习控制原理关键是学习怎么处理,如何应用好软件来配合完成系统的设计,现代控制理论不能单纯的通过简单的计算得出结论的,需要我们熟练运用软件来辅助设计,这样我们才能设计好一个校正网络。
大学物理上作业2 单项选择题 第1题保守力作功与过程无关,与参考系的选取无关,以上说法: A、正确 B、错误 C、不确定 D、无意义 答案:A 第2题若质点所受的合力矩为零,则质点的角动量不随时间改变。是___ A、质点的角动量守恒定律 B、动量守恒定律 C、质点系的动量定理 D、质点的机械能守恒定律 答案:A 第3题有关质点系的规律都可用于刚体,以上说法: A、正确 B、错误 C、不确定 D、无意义 答案:A 第4题任何时刻绕定轴转动的刚体不只有一个角速度,以上说法: A、正确 B、错误 C、不确定 D、无意义 答案:B 第5题在下列四个实例中,你认为哪一个实例中物体和地球构成的系统的机械能不守恒
A、物体作圆锥摆运动 B、抛出的铁饼作斜抛运动(不计空气阻力) C、物体在拉力作用下沿光滑斜面匀速上升 D、物体在光滑斜面上自由滑下 答案:C 判断题 第6题功是力作用对空间的积累,不受空间性质的影响 答案:错误 第7题摩擦力作功与路径有关 答案:正确 第8题动量与参考系选择无关, 但冲量、动量的增量与惯性系的选取有关。 答案:错误 第9题在任意时刻,平动刚体上各点的速度、加速度都相同。 答案:正确 第10题力矩的功就是力所作的功的一部分。 答案:错误
填空题 第11题若质点在某空间内任一位置都受到保守力作用,该空间存在___。 答案:保守力场 第12题冲量的定义是___。 答案:力与力作用时间的乘积 第13题刚体内各点都绕同一直线作圆周运动。则这种运动叫___。 答案:定轴转动 第14题决定转动惯量J大小的三个因素___,___,___。 答案:转轴位置、刚体质量、质量对轴的分布 第15题绕定轴转动刚体的动能定理是___。 答案:绕定轴转动刚体动能的微分,等于作用在刚体上所有外力之功的代数和 问答题 第16题平行轴定理。 答案:刚体对任意已知轴的转动惯量,等于刚体对通过质心并与该已知轴平行的轴的转动惯量加上刚体的质量与两轴间垂直距离d平方的乘积。 第17题保守力的特点? 答案:(1)保守力沿闭合路径一周所做的功为零,(2)保守力作功与过程无关,与参考系的选取无关。第18题质点系机械能守恒定律。 答案:若运动过程中,作用于质点系的所有外力和非保守内力都不作功,或其元功之和恒为零时, 质点系内各质点间动能和势能可以互换,但它们的总和(即机械能)保持不变。 第19题质点系动量沿坐标轴投影的守恒定律。 答案:系统在某个方向上所受的合外力为零,则总动量沿此方向的分量守恒。
题号:1 题型:单选题(请在以下几个选项中选择唯一正确答案)本题分数:2 Not until the 1980's, when the company was taken over by Eisner, ________ an advantage in the hot competition. A、had it gained B、did it gain C、it gained D、gained it 学员答案:a 说明: 本题得分:2 题号:2 题型:单选题(请在以下几个选项中选择唯一正确答案)本题分数:2 ________extremely fashionable clothes and ________ by reporters, the famous actress picked up the microphone. A、Wear,surrounded B、Wearing,surrounded C、Wearing, surrounding D、Wear, surrounding 学员答案:b 说明: 本题得分:2 题号:3 题型:单选题(请在以下几个选项中选择唯一正确答案)本题分数:2 The bank manager asked his assistant if it was possible for him to _______ the investment plan in a week. A、work out B、put out C、point out D、set out 学员答案:a 说明: 本题得分:2 题号:4 题型:单选题(请在以下几个选项中选择唯一正确答案)本题分数:2 The sale usually takes place outside the house, with the audience ________ on benches, chairs or boxes. A、having seated B、seating
大学物理学(第三版)第二章课后答案
————————————————————————————————作者:————————————————————————————————日期:
习题2 2.1 选择题 (1) 一质点作匀速率圆周运动时, (A)它的动量不变,对圆心的角动量也不变。 (B)它的动量不变,对圆心的角动量不断改变。 (C)它的动量不断改变,对圆心的角动量不变。 (D)它的动量不断改变,对圆心的角动量也不断改变。 [答案:C] (2) 质点系的内力可以改变 (A)系统的总质量。 (B)系统的总动量。 (C)系统的总动能。 (D)系统的总角动量。 [答案:C] (3) 对功的概念有以下几种说法: ①保守力作正功时,系统内相应的势能增加。 ②质点运动经一闭合路径,保守力对质点作的功为零。 ③作用力与反作用力大小相等、方向相反,所以两者所作功的代数和必为零。 在上述说法中: (A)①、②是正确的。 (B)②、③是正确的。 (C)只有②是正确的。 (D)只有③是正确的。 [答案:C] 2.2填空题 (1) 某质点在力i x F )54( (SI )的作用下沿x 轴作直线运动。在从x=0移动到x=10m 的过程中,力F 所做功为 。 [答案:290J ] (2) 质量为m 的物体在水平面上作直线运动,当速度为v 时仅在摩擦力作用下开始作匀减速运动,经过距离s 后速度减为零。则物体加速度的大小为 ,物体与水平面间的摩擦系数为 。 [答案:2 2 ;22v v s gs ] (3) 在光滑的水平面内有两个物体A 和B ,已知m A =2m B 。(a )物体A 以一定的动能E k 与静止的物体B 发生完全弹性碰撞,则碰撞后两物体的总动能为 ;(b )物体A 以一定的动能E k 与静止的物体B 发生完全非弹性碰撞,则碰撞后两物体的总动能为 。
班级___ ___学号____ ____姓名____ _____成绩______________ 一、选择题 1. m 与M 水平桌面间都是光滑接触,为维持m 与M 相对静止,则推动M 的水平力F 为:( B ) (A)(m +M )g ctg θ (B)(m +M )g tg θ (C)mg tg θ (D)Mg tg θ 2. 一质量为m 的质点,自半径为R 的光滑半球形碗口由静止下滑,质点在碗内某处的速率为v ,则质点对该处的压力数值为:( B ) (A)R mv 2 (B)R mv 232 (C)R mv 22 (D)R mv 252 3. 如图,作匀速圆周运动的物体,从A 运动到B 的过程中,物体所受合外力的冲量:( C ) (A) 大小为零 (B ) 大小不等于零,方向与v A 相同 (C) 大小不等于零,方向与v B 相同 (D) 大小不等于零,方向与物体在B 点所受合力相同 二、填空题 1. 已知m A =2kg ,m B =1kg ,m A 、m B 与桌面间的摩擦系数μ=0.5,(1)今用水平力F =10N 推m B ,则m A 与m B 的摩擦力f =_______0______,m A 的加速度a A =_____0_______. (2)今用水平力F =20N 推m B ,则m A 与m B 的摩擦力f =____5N____,m A 的加速度a A =_____1.7____. (g =10m/s 2) 2. 设有三个质量完全相同的物体,在某时刻t 它们的速度分别为v 1、v 2、v 3,并且v 1=v 2=v 3 ,v 1与v 2方向相反,v 3与v 1相垂直,设它们的质量全为m ,试问该时刻三物体组成的系统的总动量为_______m v 3________. 3.两质量分别为m 1、m 2的物体用一倔强系数为K 的轻弹簧相连放在光滑水平桌面上(如图),当两物体相距为x 时,系统由静止释放,已知弹簧的自然长度为x 0,当两物体相距为x 0时,m 1的速度大小为 2 2 121 Km x m m m + . 4. 一弹簧变形量为x 时,其恢复力为F =2ax -3bx 2,现让该弹簧由x =0变形到x =L ,其弹力的功为: 2 3 aL bL - . 5. 如图,质量为m 的小球,拴于不可伸长的轻绳上,在光滑水平桌面上作匀速圆周运动,其半径为R ,角速度为ω,绳的另一端通过光 滑的竖直管用手拉住,如把绳向下拉R /2时角速度ω’为 F m A m B m M F θ A O B R v A v B x m 1 m 2 F m R
新大学英语(2)第三次网络作业 (三次网络作业的平均成绩占期末考试总评成绩30%,作业一经批改评分,将不能修改;此次作业完成后应交到“在线作业”一栏本次作业界面中;作业必须按最后一页答卷表格格式作答,并且不要以附件形式缴交) 一.阅读: I arrived in the United States on February 6,1966, but I remember my first day here very clearly. My friend was waiting for me when my plane landed at Kennedy Airport at three o’clock in the afternoon. The weather was very cold and it was snowing, but I was too excited to mind. From the airport, my friend and I took a taxi to my hotel. On the way, I saw the skyline(轮廓)of Manhattan (曼哈顿)for the first time and I stared in astonishment at the famous skyscrapers and their man-made beauty. My friend helped me unpack at the hotel and then left me because he had to go back to work. He promised to return the next day. Shortly after my friend had left, I went to a restaurant near the hotel to get something to eat. Because I couldn’t speak a word of English, I couldn’t tell the waiter what I wanted. I was very upset and started to make some gestures(手势), but the waiter didn’t understand me. Finally, I ordered the same thing the man at the next table was eating. After dinner, I started to walk along Broadway until I came to Times Square with its movie theatres, neon lights(霓虹灯), and huge crowds of people. I did not feel tired, so I continued to talk around the city. I wanted to see everything on my first day. I knew it was impossible, but I wanted to try. When I returned to the hotel, I was exhausted(筋疲力尽), but I couldn’t sleep because I kept hearing the fire and police sirens(警笛声)during the night. I lay awake and thought about New York. It was a very big and interesting city with many tall buildings and big cars, and full of noise and busy people. I also decided right then that I had to learn to speak English. 1. On the way to his hotel, the writer______. a. was silent all the time
自动控制原理大作业 1.题目 在通常情况下,自动导航小车(AGV )是一种用来搬运物品的自动化设备。大多数AGV 都需要有某种形式的导轨,但迄今为止,还没有完全解决导航系统的驾驶稳定性问题。因此,自动导航小车在行驶过程中有时会出现轻微的“蛇行”现象,这表明导航系统还不稳定。 大多数的AGV 在说明书中都声明其最大行驶速度可以达到1m/s ,但实际速度通常只有0.5m/s ,只有在干扰较小的实验室中,才能达到最高速度。随着速度的增加,要保证小车得稳定和平稳运行将变得越来越困难。 AGV 的导航系统框图如图9所示,其中12=40ms =21ms ττ, 。为使系统响应斜坡输入的稳态误差仅为1%,要求系统的稳态速度误差系数为100。试设计合适的滞后校正网络,试系统的相位裕度达到50o ,并估计校正后系统的超调量及峰值时间。 ()R s () Y s 2.分析与校正主要过程
2.1确定开环放大倍数K 100) 1021.0)(104.0(lim )(lim =++==s s s sK s sG K v (s →0) 解得K=100 ) 1021.0)(104.0(100++=s s s G s 2.2分析未校正系统的频域特性 根据Bode 图: 穿越频率s rad c /2.49=ω 相位裕度?---=?-?--=99.18)2.49021.0(arctan )2.4904.0(arctan 9018011γ 未校正系统频率特性曲线
由图可知实际穿越频率为s rad c /5.34=ω 2.3根据相角裕度的要求选择校正后的穿越频率1c ω 现在进行计算: ???--=+=---55550)021.0(arctan )04.0(arctan 901801111c c ωω 则取s rad c /101=ω可满足要求 2.4确定滞后校正网络的校正函数 由于1120 1~101c ωω)(= 因此取s rad c /1101 11== ωω)(,则由Bode 图可以列出
习 题 七 7-1 如图所示,O S O S 21=。若在O S 1中放入一折射率为n ,厚度为e 的透明介质片,求O S 1与O S 2之间的光程差。如果1S 和2S 是两个波长为λ的同相位的相干光源,求两光在 O 点的相位差。 [解] O S 1与O S 2的几何路程相等 光程差为()e n 1-=δ 位相差为()e n 122-= =?λ π δλ π ? 7-2 一束绿光照射到两相距 的双缝上,在距双缝处的屏上出现干涉条纹。测得两相邻明条纹中心间的距离为,试求入射光的波长。 [解] 由杨氏双缝干涉知,d D x λ = ? 所以5448m 10448.55 .21060.01027.273 3=?=???=?=---D xd λ? 7-3 如图所示,在双缝干涉实验中,21SS SS =,用波长为λ的单色光照S ,通过空气后在屏幕E 上形成干涉条纹。已知点P 处为第3级干涉明条纹,求1S 和2S 到点P 的光程差。若整个装置放于某种透明液体中,点P 为第4级干涉明条纹,求该液体的折射率。 [解] 1S 和2S 到P 点的光程差满足λλδ312==-=k r r
整个装置放置于液体中,1S 和2S 到P 点的光程差满足 ()λδ412=-=r r n λλ43=n 所以得到 33.13 4 ==n 7-4 如习题7-1图所示,1S 和2S 是两个同相位的相干光源,它们发出波长λ=5000?的光波,设O 是它们中垂线上的一点,在点1S 与点O 之间的插入一折射率n =的薄玻璃,点 O 恰为第4级明条纹的中心,求它的厚度e 。 [解] 在O 点是第4级明条纹的中心 光程差 λδ4=-=e ne 所以 41041 4?=-=n e λ ? 7-5 初位相相同的两相干光源产生的波长为6000?的光波在空间某点P 相遇产生干涉,其几何路径之差为6102.1-?m 。如果光线通过的介质分别为空气(11=n )、水=2n 或松节油=3n 时,点P 的干涉是加强还是减弱。 [解] 折射率为n 的介质在P 点处光程差为 ()12r r n -=δ 介质为空气时,11=n ,则 ()λδ2m 102.16121211=?=-=-=-r r r r n 所以P 点处干涉加强。 介质为水时,=2n ,则 ()m 106.1102.133.1661222--?=??=-=r r n δ 介于两种情况之间,所以P 点光强介于最强与最弱之间。 介质为松节油时,=3n ,则 ()λδ3m 108.1102.15.1661233=?=??=-=--r r n
大学英语一第二次作业答案 题号:1 题型:单选题(请在以下几个选项中选择唯一正确答案)本题分数:5 内容: Putting in a new window will ___ cutting away part of the roof. A、include B、involve C、contain D、comprise 标准答案:B 题号:2 题型:单选题(请在以下几个选项中选择唯一正确答案)本题分数:5 内容: Before you leave, please ___ all the windows are closed. A、sure B、make sure C、certain D、assure 标准答案:B 题号:3 题型:单选题(请在以下几个选项中选择唯一正确答案)本题分数:5 内容: Young people are not to ___ to stand and look at works of art; they want art they can participate in. A、glad B、content C、confident D、generous 标准答案:B 题号:4 题型:单选题(请在以下几个选项中选择唯一正确答案)本题分数:5 内容: The textbook was compiled ten years ago. It needs ___. A、revised B、being revised C、revising D、revise 标准答案:C 题号:5 题型:单选题(请在以下几个选项中选择唯一正确答案)本题分数:5 内容: The football game comes to you ___ from New York. A、lively B、alive C、live D、living 标准答案:C 题号:6 题型:单选题(请在以下几个选项中选择唯一正确答案)本题分数:5 内容: I ___ the book I wanted to find before I left the bookstore. A、caught sight of B、caughgt C、got hold D、lost sight of 标准答案:A 题号:7 题型:单选题(请在以下几个选项中选择唯一正确答案)本题分数:5 内容: He perfers to live with his mother than ___ her alone. A、to leave B、leaving C、leave D、leaves
自动控制原理第六章课后习题答案(免费) 线性定常系统的综合 6-1 已知系统状态方程为: ()100102301010100x x u y x ? -???? ? ?=--+ ? ? ? ?????= 试设计一状态反馈阵使闭环系统极点配置为-1,-2,-3. 解: 由()100102301010100x x u y x ? -???? ? ?=--+ ? ? ? ?????=可得: (1) 加入状态反馈阵()0 12K k k k =,闭环系统特征多项式为: 32002012()det[()](2)(1)(2322)f I A bK k k k k k k λλλλλ=--=++++-+--+- (2) 根据给定的极点值,得期望特征多项式: *32()(1)(2)(3)6116f λλλλλλλ=+++=+++ (3) 比较()f λ与*()f λ各对应项系数,可得:0124,0,8;k k k === 即:()408K =
6-2 有系统: ()2100111,0x x u y x ? -????=+ ? ?-????= (1) 画出模拟结构图。 (2) 若动态性能不能满足要求,可否任意配置极点? (3) 若指定极点为-3,-3,求状态反馈阵。 解(1) 模拟结构图如下: (2) 判断系统的能控性; 0111c U ?? =?? -?? 满秩,系统完全能控,可以任意配置极点。 (3)加入状态反馈阵01(,)K k k =,闭环系统特征多项式为: ()2101()det[()](3)22f I A bK k k k λλλλ=--=+++++ 根据给定的极点值,得期望特征多项式: *2()(3)(3)69f λλλλλ=++=++ 比较()f λ与*()f λ各对应项系数,可解得:011,3k k == 即:[1,3]K =
第二章 质点动力学 四、习题选解 2-1 光滑的水平桌面上放有三个相互接触的物体,它们的质量分别为 .4,2,1321kg m kg m kg m === (1)如图a 所示,如果用一个大小等于N 98的水平力作用于1m 的左方,求此时 2m 和3m 的左边所受的力各等于多少 (2)如图b 所示,如果用同样大小的力作用于3m 的右方。求此时2m 和3m 的左边所受的力各等于多少 (3)如图c 所示,施力情况如(1), 但3m 的右方紧靠墙壁(不能动)。 求此时2m 和3m 左边所受的力各等 于多少 解:(1)三个物体受到一个水平力的作用,产生的加速度为a ρ ()a m m m F ρ ρ321++= 23 2114-?=++= s m m m m F a ρ 用隔离法分别画出32,m m 在水平方向的受力图(a ), 题2-1(a )图 由a m F ρρ=
a m f f ρ 23212=- a m f ρ 323= 2332f f = N f 5623= N f 8412= (2)由()a m m m F ρ ρ321++= 23 2114-?=++= s m m m m F a 用隔离法画出321m m m 、、在水平方向的受力图(b ) 由a m F ρρ= 得 ?????????====-=-32 23122112121232323f f f f a m f a m f f a m f F 解得: N f 1412= N f 4223= 题2-1(b )图 (3)由于321m m m 、、都不运动,加速度0=a ,三个物体彼此的作用力都相等,都等于F N f f 982312== 2-2 如图所示,一轻质弹簧连接着1m 和2m 两个物体,1m 由细线拉着在外力作用下以加速a 竖直上升。问作用在细线上的张力是多大在加速上升的过程中,若将线剪断,该瞬时1m 、2m 的加速度各是多大 解:(1)分别画出1m 、2m 受力的隔离体如图(a ),
大学物理作业(二)答 案 -CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN
2 班级___ ___学号____ ____姓名____ _____成绩______________ 一、选择题 1. m 与M 水平桌面间都是光滑接触,为维持m 与M 相对静止,则推动M 的水平力F 为:( B ) (A)(m +M )g ctg (B)(m +M )g tg (C)mg tg θ (D)Mg tg θ 2. 一质量为m 的质点,自半径为R 的光滑半球形碗口由静止下滑,质点在碗内某处的速率为v ,则质点对该处的压力数值为:( B ) (A)R mv 2 (B)R mv 232 (C)R mv 22 (D)R mv 252 3. 如图,作匀速圆周运动的物体,从A 运动到B 的过程中,物体所受合外力的冲量:( C ) (A) 大小为零 (B ) 大小不等于零,方向与v A 相同 (C) 大小不等于零,方向与v B 相同 (D) 大小不等于零,方向与物体在B 点所受合力相同 二、填空题 1. 已知m A =2kg ,m B =1kg ,m A 、m B 与桌面间的摩擦系数μ=0.5,(1)今用水平力F =10N 推m B ,则m A 与m B 的摩擦力f =_______0______,m A 的加速度a A =_____0_______. (2)今用水平力F =20N 推m B ,则m A 与m B 的摩擦力f =____5N____,m A 的加速度a A =_____1.7____. (g =10m/s 2) 2. 设有三个质量完全相同的物体,在某时刻t 它们的速度分别为v 1、v 2、v 3,并且 v 1=v 2=v 3 ,v 1与v 2方向相反,v 3与v 1相垂直,设它们的质量全为m ,试问该时刻三物体组成的系统的总动量为_______m v 3________. 3.两质量分别为m 1、m 2的物体用一倔强系数为K 的轻弹簧相连放在光滑水平桌面上(如图),当两物体相距为x 时,系统由静止释放,已知弹簧的自然长度为x 0,当两物体相距为x 0时,m 1的速度大小为 2 2 121 Km x m m m + . 4. 一弹簧变形量为x 时,其恢复力为F =2ax -3bx 2,现让该弹簧由x =0变形到x =L ,其弹力的功为: 2 3 aL bL - . 5. 如图,质量为m 的小球,拴于不可伸长的轻绳上,在光滑水平桌面上作匀速圆周运动,其半径为R ,角速度为ω,绳的另一端通过 F m A m B m M F θ A O B R v A v B x m 1 m 2 m R
记分作业 2 一、交际用语 1--- I won the first prize in todays speech contest. ---_______ A) Congratulations! B) Great! C) Thanks! 参考答案: A 2---Would you like to have dinner with my family this Saturday ---_______ A) Thank you. I’d love to come. B) I would. C)
参考答案: A 3--- Hello, can I speak to Liu Hui, please ---_______ A) Yes, I am. B) Yes, speaking. C) Yes, you can. 参考答案: B 4--- Hello, I’m Susan. Nice to meet you. ---_______ A) Are you B) Nice to meet you,too. C) Very nice. 参考答案: B
A) Much better. B) It ’s OK. C) Thank you. 参考答案: A 二、词汇与结构 you are driving. 6 Don’t forget to_______your seat belt when A) put up B) put off C) put on 参考答案: C 7 The couple was _______that they couldn ’t drive home. A)
自动控制原理大作业 已知单位反馈控制系统如图所示,其中0()(1) K G s s s = +。
1、试用频率法设计串联超前校正网络()c G s ,满足:单位斜坡输入时,位置输出稳态误差1 9 ss e = ,开环截止频率 4.5/c rad s ω''=,相角裕度50γ''≥,请写出校正具体步骤: 解: 1.求开环增益K 传递函数为:0()(1) K G s s s = + 此系统为为Ⅰ型系统,且系统稳定,故由稳态误差91 1e ss == K 知:K=9 校正前系统传递函数为)() (1s s 9 s o +=G (1)根据校正前系统Bode 图,确定校正前系统相角裕度和开环截止频率: 0w c =)(L 0w 9 lg 202c = s /rad 3w c = 43.18arctanw -90-180)w (180r c c o ==+=? (2)计算校正网络的参数a 和τ: 已知开环截止频率 4.5/c rad s ω''= 取s /rad 5.4w w c m =" =
c o lg 20lga 10-5 .4==)(L 06.5 0988 .006 .5*5.41 a *w 1m === τ 10988.01 s 5.01s 1s a s c ++= ++=s G ττ) ( (3)验算校正后的性能指标是否满足设计要求: ) 1s 0988.0)(1s (s ) 1s 5.0(9)s ()s ()s (c o +++= =G G G 6.549 7.23-47.77-04.6690)w *098 8.0(arctan -arctanw -90-)w *5.0(arctan 180)w (180r c c c c =+=" " "+="+=''? 满足设计要求。 2、用MATLAB 画出校正前系统、校正装置和校正后系统的Bode 图: -100 100 M a g n i t u d e (d B )10 10 10 10 10 10 -180 -135-90-45045P h a s e (d e g ) Bode Diagram Frequency (rad/sec) MATLAB 程序: G1=tf(9,[1,1,0]); G2=tf(9*[0.5,1],conv([1,1,0],[0.0988,1])); G3=tf([0.5 1],[0.0988 1]) bode(G1) hold bode(G2,'--')
第 1 页 共 3 页 大学英语(二)作业答案 一、交际对话 1-5 ACBDB 5-10 ADBAC 11-15 A B DCA 16-20 CBCDA 二、阅读理解 Passage 1 : B A D C B Passage 2 : C B A B D Passage 3 : C B C D A Passage 4 : C A D C A Passage 5 : A B B C D Passage 6 : D B C A C Passage 7 : B C A D C Passage 8 : A C D B D Passage 9 : D A C A B Passage 10 : D B C D A Passage 11 : B C B A C Passage 12 : C D A B C 三、词汇和结构 1-10. D A C B A A B C D C 10-20. C D A C B C D B B A
第 2 页 共 3 页 21-30. A D C B B A B C C D 31-40. B D C B A A B D A C 四、完型填空 Passage 1 : 1-5 A B B D A 6-10. C A D C D Passage 2 :11-15. C A B A C 16-20. D B D A B Passage 3:21-25. B D C B A 26-30. A B C D C Passage 4: 31-35. C D B B B 36-40. D A C D B 五、英汉互译 1. 这本书将为我们提供所需要的全部信息。 2. 尽管总是被打扰,他还是按时完成了工作。 3. 他最好的乐曲创作灵感来自怀念他的母亲。 4. We should keep on recycling paper. 5. She jogs every morning for thirty minutes to get rid of her excessive weight. 6. 直到他生了重病,他才知道健康的重要。 7. 他唯一的希望是今年暑假去长途旅行。 8. 政府已答应采取措施帮助失业人员。 9. You should look up the usage of this word in the dictionary. 10. Taking effective notes in class is a vital skill for college students.
哈工大自动控制原理大 作业 HUA system office room 【HUA16H-TTMS2A-HUAS8Q8-HUAH1688】
Harbin Institute of Technology 课程设计说明书(论文) 课程名称:自控控制原理大作业 设计题目:控制系统的矫正 院系:自动化测试与控制系 班级: 设计者: 学号: 指导教师:强盛 设计时间: 2016.12.21 哈尔滨工业大学 题目8 8. 在德国柏林,磁悬浮列车已经开始试验运行,长度为 1600m的M-Bahn号实验线路系统代表了目前磁悬浮列车的发展水平。自动化的磁悬浮列车可以在较短的时间内正常运行,而且具有较高的能量利用率。车体悬浮控制系统的框图模型如图 8 所示,试设计一
个合适的校正网络,使系统的相位裕度满足45°≤ γ ≤55°,并估算校正后系统的阶跃响应。 图 8 题 8 中磁悬浮列车悬浮控制系统 一、人工设计 利用半对数坐标纸手工绘制系统校正前后及校正装置的Bode图,并确定出 校正装置的传递函数。验算校正后系统是否满足性能指标要求。 1)未校正系统的开环频率特性函数应为: γ0(γγ)= 1 γ2(γ+10) 2)未校正系统的幅频特性曲线图如下: 由图中可以得出: γγ=√γ=0.316 rad/s 对应的相位裕度为: γ(γγ)=180°?180°?arctan( γγ 10 )=?1.81° G c(s) 1
3)超前校正提供(m)=50° 4)γ?1 γ+1 =γγγ50°解得 a=7.5 5)?10γγγ=?8.75γγ,得到γγ=0.523 rad/s 6)1 γ=√γγγ=1.43 rad/s 1 γγ =0.19 rad/s 7)γγ(γ)=1+5.3γ 1+0.7γ 二、计算机辅助设计 利用MATLAB语言对系统进行辅助设计、仿真和调试 g = tf(1,[1 10 0 0]); gc = tf([5.3 1],[0.7 1]); ge = tf([5.3 1],conv([0.7 1],[1 10 0 0])); bode(g,gc,ge); grid legend('uncompensated','compensator','compensated') [kg,r,wg,wc]=margin(ge)
大学物理学习题答案 习题一答案 习题一 1.1 简要回答下列问题: (1) 位移和路程有何区别?在什么情况下二者的量值相等?在什么情况下二者的量值不相 等? (2) 平均速度和平均速率有何区别?在什么情况下二者的量值相等? (3) 瞬时速度和平均速度的关系和区别是什么?瞬时速率和平均速率的关系和区别又是什 么? (4) 质点的位矢方向不变,它是否一定做直线运动?质点做直线运动,其位矢的方向是否一 定保持不变? (5) r ?和r ?有区别吗?v ?和v ?有区别吗? 0dv dt =和0d v dt =各代表什么运动? (6) 设质点的运动方程为:()x x t =,()y y t =,在计算质点的速度和加速度时,有人先求 出22r x y = + dr v dt = 及 22d r a dt = 而求得结果;又有人先计算速度和加速度的分量,再合成求得结果,即 v = 及 a =你认为两种方法哪一种正确?两者区别何在? (7) 如果一质点的加速度与时间的关系是线性的,那么,该质点的速度和位矢与时间的关系是否也是线性的? (8) “物体做曲线运动时,速度方向一定在运动轨道的切线方向,法向分速度恒为零,因此 其法向加速度也一定为零.”这种说法正确吗? (9) 任意平面曲线运动的加速度的方向总指向曲线凹进那一侧,为什么? (10) 质点沿圆周运动,且速率随时间均匀增大,n a 、t a 、a 三者的大小是否随时间改变? (11) 一个人在以恒定速度运动的火车上竖直向上抛出一石子,此石子能否落回他的手中?如果石子抛出后,火车以恒定加速度前进,结果又如何? 1.2 一质点沿x 轴运动,坐标与时间的变化关系为224t t x -=,式中t x ,分别以m 、s 为单位,试计算:(1)在最初s 2内的位移、平均速度和s 2末的瞬时速度;(2)s 1末到s 3末的平均