T1T2T3T4
Co-simulation with Maxwell
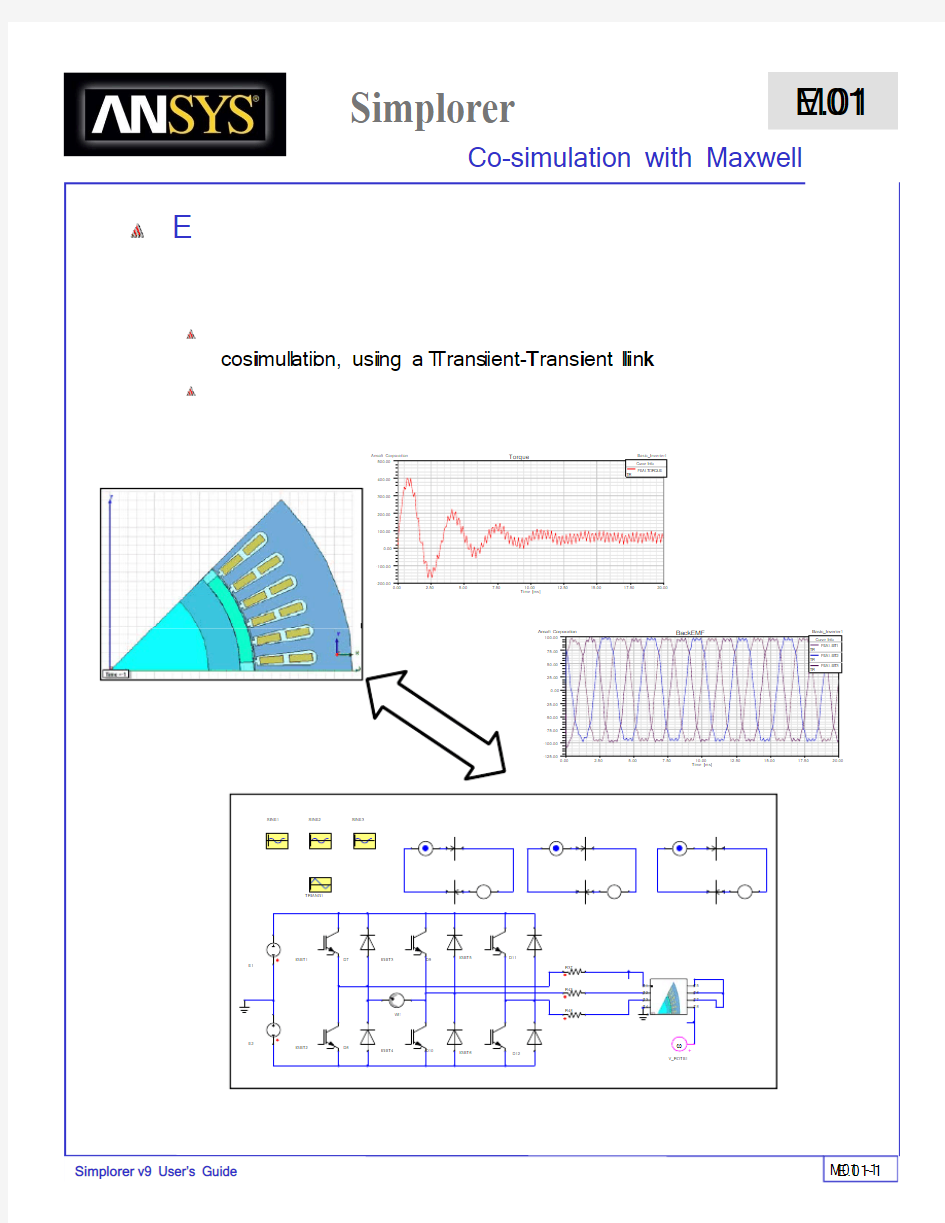
inverter currents as source in Maxwell, and the back-emf of the motor on the inverter currents as source in Maxwell and the back emf of the motor on the inverter side.
Simplorer and Maxwell will run altogether
complexity of the drive system and of the mechanical system is not The complexity of the drive system and of the mechanical system is not
limited
The Simplorer time steps and the Maxwell time steps don’t have to be the
same. Usually, Simplorer requires much more time steps than Maxwell.
ppears on Simplorer side (state graph transition, large change of the
pp p(g p,g g
dynamic of the circuit), Simplorer will roll back to t0and set a new forward meeting time t1’, t1’< t1.
Co-simulation with Maxwell
Co-simulation with Maxwell
The switching of the IGBTs is done through a state graph that will compare the
reference wave forms and the chopper signal
Co-simulation with Maxwell Simplorer Schematic
Co-simulation with Maxwell
Co-simulation with Maxwell
Co-simulation with Maxwell
Make sure that the initial current is 0
Repeat the same operation for PhaseB and PhaseC.
Make sure to know where the project is saved on the disk
sure to know where the project is saved on the disk
Co-simulation with Maxwell
Co-simulation with Maxwell
Co-simulation with Maxwell
Co-simulation with Maxwell
ge, and move the image away in order to have access to g g y
the symbol footprint
Co-simulation with Maxwell
The motor image needs to be resized and re centered
Co-simulation with Maxwell
Co-simulation with Maxwell
Rotational_V folder, choose the V_ROT: Angular Velocity Source Rotational V folder choose the V ROT:Angular Velocity Source
Note: Simplorer allows you to have much more complicated mechanical systems
Co-simulation with Maxwell
Tracepro 入门与进阶
CYQ DESIGN STUDIO
1
Tracepro 入门与进阶
CYQ DESIGN STUDIO
内 容 简 介
本书以美国 Lambda Research Corporation 的最新 3.24 版本为蓝本进行编写, 内容涵盖了 tracepro3.24 光学仿真设计的概念、tracepro 软件的配置和用户定制、光 学元件模型的创建、描光、分析等内容。 本书章节的安排次序采用由浅入深,前后呼应的教学原则,在内容安排上,为方 便读者更快、更深入地理解 tracepro 软件中的一些相关概念、命令和功能,并对运用 该软件进行光学仿真设计的过程有一个全局的了解,本书中介绍了单片 LCD 投影机 的仿真设计全过程,同时在本书的最后一章详细介绍了背光源等光学仿真设计过程, 增强了本书的可读性和实用性,摆脱单个概念、命令、功能的枯燥讲解和介绍。 本书可作为光学专业人员的自学教程和参考书籍, 也可作为大专院校光学、 光电专业 的学生学习 tracepro 的使用教材。
2
Tracepro 入门与进阶
CYQ DESIGN STUDIO
前
言
Tracepro 是一套可以做照明光学系统分析、传统光学分析,辐射度以及光度分析 的软件, 它也是第一套由符合工业标准的 ACIS 立体模型绘图软件发展出来的光机软 件。 功能强大的 Tracepro 减轻了光学设计人员的劳动强度,节约了大量的人力资源, 缩短了设计周期,还可以开发出更多质量更高的光学产品。但目前 Tracepro 学习教 程甚少, 不少初学者苦于无参考学习资料而举步为艰。 本人根据从事光学设计的经验 与运用 Tracepro 的体会,汇集成书,目的是使 Tracepro 的初学人员能快速入门,快 速见效,使已入门者能进一步提高 Tracepro 的应用水平和操作能力,从而在工作中 发挥更大的效益,为中国的光学事业作出贡献! 本书乃仓促而成,虽然几经校对,但错误之处在所难免,恳请广大读者朋友予以 指正,不甚感谢! 电子邮箱: cyqdesign@https://www.doczj.com/doc/e013584812.html,
陈涌泉 2004 年 12 月 4 日
3
人工神经网络原理及实际应用 摘要:本文就主要讲述一下神经网络的基本原理,特别是BP神经网络原理,以及它在实际工程中的应用。 关键词:神经网络、BP算法、鲁棒自适应控制、Smith-PID 本世纪初,科学家们就一直探究大脑构筑函数和思维运行机理。特别是近二十年来。对大脑有关的感觉器官的仿生做了不少工作,人脑含有数亿个神经元,并以特殊的复杂形式组成在一起,它能够在“计算"某些问题(如难以用数学描述或非确定性问题等)时,比目前最快的计算机还要快许多倍。大脑的信号传导速度要比电子元件的信号传导要慢百万倍,然而,大脑的信息处理速度比电子元件的处理速度快许多倍,因此科学家推测大脑的信息处理方式和思维方式是非常复杂的,是一个复杂并行信息处理系统。1943年Macullocu和Pitts融合了生物物理学和数学提出了第一个神经元模型。从这以后,人工神经网络经历了发展,停滞,再发展的过程,时至今日发展正走向成熟,在广泛领域得到了令人鼓舞的应用成果。本文就主要讲述一下神经网络的原理,特别是BP神经网络原理,以及它在实际中的应用。 1.神经网络的基本原理 因为人工神经网络是模拟人和动物的神经网络的某种结构和功能的模拟,所以要了解神经网络的工作原理,所以我们首先要了解生物神经元。其结构如下图所示: 从上图可看出生物神经元它包括,细胞体:由细胞核、细胞质与细胞膜组成;
轴突:是从细胞体向外伸出的细长部分,也就是神经纤维。轴突是神经细胞的输出端,通过它向外传出神经冲动;树突:是细胞体向外伸出的许多较短的树枝状分支。它们是细胞的输入端,接受来自其它神经元的冲动;突触:神经元之间相互连接的地方,既是神经末梢与树突相接触的交界面。 对于从同一树突先后传入的神经冲动,以及同一时间从不同树突输入的神经冲动,神经细胞均可加以综合处理,处理的结果可使细胞膜电位升高;当膜电位升高到一阀值(约40mV),细胞进入兴奋状态,产生神经冲动,并由轴突输出神经冲动;当输入的冲动减小,综合处理的结果使膜电位下降,当下降到阀值时。细胞进入抑制状态,此时无神经冲动输出。“兴奋”和“抑制”,神经细胞必呈其一。 突触界面具有脉冲/电位信号转换功能,即类似于D/A转换功能。沿轴突和树突传递的是等幅、恒宽、编码的离散电脉冲信号。细胞中膜电位是连续的模拟量。 神经冲动信号的传导速度在1~150m/s之间,随纤维的粗细,髓鞘的有无而不同。 神经细胞的重要特点是具有学习功能并有遗忘和疲劳效应。总之,随着对生物神经元的深入研究,揭示出神经元不是简单的双稳逻辑元件而是微型生物信息处理机制和控制机。 而神经网络的基本原理也就是对生物神经元进行尽可能的模拟,当然,以目前的理论水平,制造水平,和应用水平,还与人脑神经网络的有着很大的差别,它只是对人脑神经网络有选择的,单一的,简化的构造和性能模拟,从而形成了不同功能的,多种类型的,不同层次的神经网络模型。 2.BP神经网络 目前,再这一基本原理上已发展了几十种神经网络,例如Hopficld模型,Feldmann等的连接型网络模型,Hinton等的玻尔茨曼机模型,以及Rumelhart 等的多层感知机模型和Kohonen的自组织网络模型等等。在这众多神经网络模型中,应用最广泛的是多层感知机神经网络。 这里我们重点的讲述一下BP神经网络。多层感知机神经网络的研究始于50年代,但一直进展不大。直到1985年,Rumelhart等人提出了误差反向传递学习算法(即BP算),实现了Minsky的多层网络设想,其网络模型如下图所示。它可以分为输入层,影层(也叫中间层),和输出层,其中中间层可以是一层,也可以多层,看实际情况而定。
2排队论与离散事件仿真理论 2. 1排队论概述 排队是生活中经常出现的现象,如学生或老师去图书馆借阅资料、书籍时等待等级 的情况,病人去医院看病在门诊处等待挂号,参加公司招聘在外面等待进入面试的过程,订单请求在配送中心计算机终端内的等待处理过程以及超市中顾客购物完毕之后在收 银台前等待付账的过程等均为排队现象。 研究排队问题即是研究服务机构设置与接受服务者数量之间的关系。若来到系统内 的顾客数目多于服务台的数目,这样就无法在第一时间办理业务,需要进入队列等候, 这便是排队现象,现实生活中不难发现,顾客的到达和服务的时间都是随机的,这就导 致了排队现象是无法完全消除的。2排队论与离散事件仿真理论 2. 1排队论概述 排队是生活中经常出现的现象,如学生或老师去图书馆借阅资料、书籍时等待等级 的情况,病人去医院看病在门诊处等待挂号,参加公司招聘在外面等待进入面试的过程,订单请求在配送中心计算机终端内的等待处理过程以及超市中顾客购物完毕之后在收 银台前等待付账的过程等均为排队现象。 研究排队问题即是研究服务机构设置与接受服务者数量之间的关系。若来到系统内 的顾客数目多于服务台的数目,这样就无法在第一时间办理业务,需要进入队列等候, 这便是排队现象,现实生活中不难发现,顾客的到达和服务的时间都是随机的,这就导 致了排队现象是无法完全消除的。2. 1. 4排队问题的求解 首先需要知道系统中各项因素的数据情况,即研究系统中服务机构的数量、服务效率、规则、顾客到达数量、到达间隔时间、排队规则等,从而分析系统特征,得到系统(1) LS:系统状态平稳时的队长的平均值(包括正在接受服务的顾客),是系统内顾客 数的均值。 (2) Lq:系统的平均等待队长,是系统内排队等候的顾客的均值。 (3) WS:平稳状态下顾客在系统中的平均逗留时间,即顾客在系统内逗留时间的均值。 (4) Wq:平稳状态下顾客在系统中的平均等待时间,它是顾客排队等候服务时间的 均值,如果设顾客接受服务的时间的均值为L}},则有WS一Wq + L}} o (5)绝对通过能力A,它为单位时间内被服务完顾客的均值。 (6)相对通过能力Q,它为单位时间内被服务完顾客数与请求服务顾客数之比值。 (7)服务窗连续繁忙的时间长度,即忙期Tb o 系统的状态是指系统中的顾客数,如果有n个顾客就说系统的状态为n,计算以上 这些指标的基础是表达系统状态的概率。系统的状态可能有以下几种情况: ①不限制队长,n=0,1,2,}}} ②限制队长,最大数位N , n = 0,1,2,}}}, N ③即时制,服务台个数为。时,n = 0,1,2, } } }, c 则Pn (t)表示在时刻t、系统状态为n时概率。
人工神经网络的发展与应用 神经网络发展 启蒙时期 启蒙时期开始于1980年美国著名心理学家W.James关于人脑结构与功能的研究,结束于1969年Minsky和Pape~发表的《感知器》(Perceptron)一书。早在1943年,心理学家McCulloch和数学家Pitts合作提出了形式神经元的数学模型(即M—P模型),该模型把神经细胞的动作描述为:1神经元的活动表现为兴奋或抑制的二值变化;2任何兴奋性突触有输入激励后,使神经元兴奋与神经元先前的动作状态无关;3任何抑制性突触有输入激励后,使神经元抑制;4突触的值不随时间改变;5突触从感知输入到传送出一个输出脉冲的延迟时问是0.5ms。可见,M—P模型是用逻辑的数学工具研究客观世界的事件在形式神经网络中的表述。现在来看M—P 模型尽管过于简单,而且其观点也并非完全正确,但是其理论有一定的贡献。因此,M—P模型被认为开创了神经科学理论研究的新时代。1949年,心理学家D.0.Hebb 提出了神经元之间突触联系强度可变的假设,并据此提出神经元的学习规则——Hebb规则,为神经网络的学习算法奠定了基础。1957年,计算机学家FrankRosenblatt提出了一种具有三层网络特性的神经网络结构,称为“感知器”(Perceptron),它是由阈值性神经元组成,试图模拟动物和人脑的感知学习能力,Rosenblatt认为信息被包含在相互连接或联合之中,而不是反映在拓扑结构的表示法中;另外,对于如何存储影响认知和行为的信息问题,他认为,存储的信息在神经网络系统内开始形成新的连接或传递链路后,新 的刺激将会通过这些新建立的链路自动地激活适当的响应部分,而不是要求任何识别或坚定他们的过程。1962年Widrow提出了自适应线性元件(Ada—line),它是连续取值的线性网络,主要用于自适应信号处理和自适应控制。 低潮期 人工智能的创始人之一Minkey和pape~经过数年研究,对以感知器为代表的网络系统的功能及其局限性从数学上做了深入的研究,于1969年出版了很有影响的《Perceptron)一书,该书提出了感知器不可能实现复杂的逻辑函数,这对当时的人工神经网络研究产生了极大的负面影响,从而使神经网络研究处于低潮时期。引起低潮的更重要的原因是:20世纪7O年代以来集成电路和微电子技术的迅猛发展,使传统的冯·诺伊曼型计算机进入发展的全盛时期,因此暂时掩盖了发展新型计算机和寻求新的神经网络的必要性和迫切性。但是在此时期,波士顿大学的S.Grossberg教授和赫尔辛基大学的Koho—nen教授,仍致力于神经网络的研究,分别提出了自适应共振理论(Adaptive Resonance Theory)和自组织特征映射模型(SOM)。以上开创性的研究成果和工作虽然未能引起当时人们的普遍重视,但其科学价值却不可磨灭,它们为神经网络的进一步发展奠定了基础。 复兴时期 20世纪80年代以来,由于以逻辑推理为基础的人工智能理论和冯·诺伊曼型计算机在处理诸如视觉、听觉、联想记忆等智能信息处理问题上受到挫折,促使人们
COMSOL Multiphysics仿真步骤 1算例介绍 一电磁铁模型截面及几何尺寸如图1所示,铁芯为软铁,磁化曲线(B-H)曲线如图2所示,励磁电流密度J=250 A/cm2。现需分析磁铁内的磁场分布。 图1电磁铁模型截面图(单位cm) 图2铁芯磁化曲线 2 COMSOL Multiphysics仿真步骤 根据磁场计算原理,结合算例特点,在COMSOL Multiphysics中实现仿真。 (1) 设定物理场 COMSOL Multiphysics 4.0以上的版本中,在AC/DC模块下自定义有8种应用模式,分别为:静电场(es)、电流(es)、电流-壳(ecs)、磁场(mf)、磁场和电场(mef)、带电粒子追踪(cpt)、电路(cir)、磁场-无电流(mfnc)。其中,“磁场(mef)”是以磁矢势A作为因变量,可应用于: ①已知电流分布的DC线圈; ②电流趋于表面的高频AC线圈;
③任意时变电流下的电场和磁场分布; 根据所要解决的问题的特点——分析磁铁在线圈通电情况下的电磁场分布,选择2维“磁场(mf)”应用模式,稳态求解类型。 (2) 建立几何模型 根据图1,在COMSOL Multiphysics中建立等比例的几何模型,如图3所示。 图3几何模型 有限元仿真是针对封闭区域,因此在磁铁外添加空气域,包围磁铁。 由于磁铁的磁导率,因此空气域的外轮廓线可以理想地认为与磁场线迹线重合,并设为磁位的参考点,即 (21) 式中,L为空气外边界。 (3) 设置分析条件 ①材料属性 本算例中涉及到的材料有空气和磁铁,在软件自带的材料库中选取Air和Soft Iron。 对于磁铁的B-H曲线,在该节点下将已定义的离散B-H曲线表单导入其中即可。 ②边界条件 由于磁铁的磁导率,因此空气域的外轮廓线可以理想地认为与磁场线迹线重合,并设为磁位的参考点,即 (21) 式中,L为空气外边界。 为引入磁铁的B-H曲线,除在材料属性节点下导入B-H表单之外,还需在“磁场(mef)”节点下选择“安培定律”,域为“2”,即磁铁区域,在“磁场 > 本构关系”处将本构关系选择为“H-B曲线”。此时,即表示将材料性质表达为磁通密度B的函数,也符合以磁矢势A作为因变量时的表达,从而避免在本构关系中定义循环变量。设置窗口如下图所示。
Requirements Models: None Properties: None Editions: TracePro LC, Standard and Expert Introduction In this example you will build a source model for a Siemens LWT676 surface mount LED based on the manufacturer’s data sheet. The dimensions will be used to build a solid model and the source output will be defined to match the LED photometric curve. Copyright ? 2013 Lambda Research Corporation.
Create a Thin Sheet First analyze the package to determine the best method of constructing the geometry in TracePro. The symmetry of the package suggests starting from a Thin Sheet and extruding the top and bottom halves with a small draft angle. Construct Thin Sheet in the XY plane. 1. Start TracePro 2. Select View|Profiles|XY or click the View XY button on the toolbar, and switch to silhouette mode, View|Silhouette. 3. Select Insert|Primitive Solid and select the Thin Sheet tab. 4. Enter the four corners of the Thin Sheet in mm in the dialog box, as shown below, and click Insert. 5. Click the Zoom All button or select View|Zoom|All to see the new object.
人工神经网络 系别:计算机工程系 班级: 1120543 班 学号: 13 号 姓名: 日期:2014年10月23日
人工神经网络 摘要:人工神经网络是一种应用类似于大脑神经突触联接的结构进行信息处理的数学模型。在工程与学术界也常直接简称为神经网络或类神经网络。神经网络是一种运算模型,由大量的节点(或称神经元)之间相互联接构成,由大量处理单元互联组成的非线性、自适应信息处理系统。它是在现代神经科学研究成果的基础上提出的,试图通过模拟大脑神经网络处理、记忆信息的方式进行信息处理。 关键词:神经元;神经网络;人工神经网络;智能; 引言 人工神经网络的构筑理念是受到生物(人或其他动物)神经网络功能的运作启发而产生的。人工神经网络通常是通过一个基于数学统计学类型的学习方法(Learning Method )得以优化,所以人工神经网络也是数学统计学方法的一种实际应用,通过统计学的标准数学方法我们能够得到大量的可以用函数来表达的局部结构空间,另一方面在人工智能学的人工感知领域,我们通过数学统计学的应用可以来做人工感知方面的决定问题(也就是说通过统计学的方法,人工神经网络能够类似人一样具有简单的决定能力和简单的判断能力),这种方法比起正式的逻辑学推理演算更具有优势。 一、人工神经网络的基本原理 1-1神经细胞以及人工神经元的组成 神经系统的基本构造单元是神经细胞,也称神经元。它和人体中其他细胞的关键区别在于具有产生、处理和传递信号的功能。每个神经元都包括三个主要部分:细胞体、树突和轴突。树突的作用是向四方收集由其他神经细胞传来的信息,轴突的功能是传出从细胞体送来的信息。每个神经细胞所产生和传递的基本信息是兴奋或抑制。在两个神经细胞之间的相互接触点称为突触。简单神经元网络及其简化结构如图2-2所示。 从信息的传递过程来看,一个神经细胞的树突,在突触处从其他神经细胞接受信号。 这些信号可能是兴奋性的,也可能是抑制性的。所有树突接受到的信号都传到细胞体进行综合处理,如果在一个时间间隔内,某一细胞接受到的兴奋性信号量足够大,以致于使该细胞被激活,而产生一个脉冲信号。这个信号将沿着该细胞的轴突传送出去,并通过突触传给其他神经细胞.神经细胞通过突触的联接形成神经网络。 图1-1简单神经元网络及其简化结构图 (1)细胞体 (2)树突 (3)轴突 (4)突触
人工神经网络及其应用实例人工神经网络是在现代神经科学研究成果基础上提出的一种抽 象数学模型,它以某种简化、抽象和模拟的方式,反映了大脑功能的 若干基本特征,但并非其逼真的描写。 人工神经网络可概括定义为:由大量简单元件广泛互连而成的复 杂网络系统。所谓简单元件,即人工神经元,是指它可用电子元件、 光学元件等模拟,仅起简单的输入输出变换y = σ (x)的作用。下图是 3 中常用的元件类型: 线性元件:y = 0.3x,可用线性代数法分析,但是功能有限,现在已不太常用。 2 1.5 1 0.5 -0.5 -1 -1.5 -2 -6 -4 -2 0 2 4 6 连续型非线性元件:y = tanh(x),便于解析性计算及器件模拟,是当前研究的主要元件之一。
离散型非线性元件: y = ? 2 1.5 1 0.5 0 -0.5 -1 -1.5 -2 -6 -4 -2 2 4 6 ?1, x ≥ 0 ?-1, x < 0 ,便于理论分析及阈值逻辑器件 实现,也是当前研究的主要元件之一。 2 1.5 1 0.5 0 -0.5 -1 -1.5 -2 -6 -4 -2 2 4 6
每一神经元有许多输入、输出键,各神经元之间以连接键(又称 突触)相连,它决定神经元之间的连接强度(突触强度)和性质(兴 奋或抑制),即决定神经元间相互作用的强弱和正负,共有三种类型: 兴奋型连接、抑制型连接、无连接。这样,N个神经元(一般N很大)构成一个相互影响的复杂网络系统,通过调整网络参数,可使人工神 经网络具有所需要的特定功能,即学习、训练或自组织过程。一个简 单的人工神经网络结构图如下所示: 上图中,左侧为输入层(输入层的神经元个数由输入的维度决定),右侧为输出层(输出层的神经元个数由输出的维度决定),输入层与 输出层之间即为隐层。 输入层节点上的神经元接收外部环境的输入模式,并由它传递给 相连隐层上的各个神经元。隐层是神经元网络的内部处理层,这些神 经元在网络内部构成中间层,不直接与外部输入、输出打交道。人工 神经网络所具有的模式变换能力主要体现在隐层的神经元上。输出层 用于产生神经网络的输出模式。 多层神经网络结构中有代表性的有前向网络(BP网络)模型、
人工神经网络作业M A T L A B 仿真(共3篇) -标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
人工神经网络仿真作业(3篇) 人工神经网络仿真作业1: 三级倒立摆的神经网络控制 人工神经网络仿真作业2: 基于模型整体逼近的机器人RBF网络自适应控制 人工神经网络仿真作业3: 基于RBF的机械手无需模型自适应控制研究
神经网络仿真作业1:三级倒立摆的神经网络控制 摘要:建立了基于人工神经网络改进BP 算法的三级倒立摆的数学模型,并给 出了BP 网络结构,利用Matlab 软件进行训练仿真,结果表明,改进的BP 算法控制倒立摆精度高、收敛快,在非线性控制、鲁棒控制等领域具有良好的应用前景。 1.引言 倒立摆系统的研究开始于19世纪50年代,它是一个典型的非线性、高阶次、多变量、强耦合和绝对不稳定系统.许多抽象的控制概念,如系统的稳定性、可控性、系统的收敛速度和抗干扰能力都可以通过倒立摆直观地表现出来。随着现代控制理论的发展,倒立摆的研究对于火箭飞行控制和机器人控制等现代高科技的研究具有重要的实践意义。目前比较常见的倒立摆稳定控制方法有线性控制,如LQR,LQY 等;智能控制,如变论域自适应模糊控制,遗传算法,预测控制等。 2.系统的数学模型 2.1三级倒立摆的模型及参数 三级倒立摆主要由小车,摆1、摆2、摆3组成,它们之间自由链接。小车可以在水平导轨上左右平移,摆杆可以在铅垂平面内运动,将其置于坐标系后如图1 所示: 规定顺时针方向的转角和力矩均为正。此外,约定以下记号:u 为外界作用力,x 为小车位移,i (i =1,2,3)为摆i 与铅垂线方向的夹角, i O 分别为摆i 的链接点位置。其它的系统参数说明如下:
人工神经网络概述及其在分类中的应用举例 人工神经网络(ARTIFICIAL NEURAL NETWORK,简称ANN)是目前国际上一门发展迅速的前沿交叉学科。为了模拟大脑的基本特性,在现代神经科学研究的基础上,人们提出来人工神经网络的模型。人工神经网络是在对人脑组织结构和运行机智的认识理解基础之上模拟其结构和智能行为的一种工程系统。 神经网络在2个方面与人脑相似: (1) 人工神经网络获取的知识是从外界环境中学习得来的。 (2) 互连神经元的连接强度,即突触权值,用于存储获取的信息。他既是高度非线性动力学系统,又是自适应组织系统,可用来描述认知、决策及控制的智能行为。神经网络理论是巨量信息并行处理和大规模并行计算的基础。 一人工神经网络的基本特征 1、并行分布处理:人工神经网络具有高度的并行结构和并行处理能力。这特别适于实时控制和动态控制。各组成部分同时参与运算,单个神经元的运算速度不高,但总体的处理速度极快。 2、非线性映射:人工神经网络具有固有的非线性特性,这源于其近似任意非线性映射(变换)能力。只有当神经元对所有输入信号的综合处理结果超过某一门限值后才输出一个信号。因此人工神经网络是一
种具有高度非线性的超大规模连续时间动力学系统。 3、信息处理和信息存储合的集成:在神经网络中,知识与信息都等势分布贮存于网络内的各神经元,他分散地表示和存储于整个网络内的各神经元及其连线上,表现为神经元之间分布式的物理联系。作为神经元间连接键的突触,既是信号转换站,又是信息存储器。每个神经元及其连线只表示一部分信息,而不是一个完整具体概念。信息处理的结果反映在突触连接强度的变化上,神经网络只要求部分条件,甚至有节点断裂也不影响信息的完整性,具有鲁棒性和容错性。 4、具有联想存储功能:人的大脑是具有联想功能的。比如有人和你提起内蒙古,你就会联想起蓝天、白云和大草原。用人工神经网络的反馈网络就可以实现这种联想。神经网络能接受和处理模拟的、混沌的、模糊的和随机的信息。在处理自然语言理解、图像模式识别、景物理解、不完整信息的处理、智能机器人控制等方面具有优势。 5、具有自组织自学习能力:人工神经网络可以根据外界环境输入信息,改变突触连接强度,重新安排神经元的相互关系,从而达到自适应于环境变化的目的。 6、软件硬件的实现:人工神经网络不仅能够通过硬件而且可借助软件实现并行处理。近年来,一些超大规模集成电路的硬件实现已经问世,而且可从市场上购到,这使得神经网络具有快速和大规模处理能力的实现网络。许多软件都有提供了人工神经网络的工具箱(或软件包)如Matlab、Scilab、R、SAS等。 二人工神经网络的基本数学模型
人工神经网络在蕨类植物生长中的应用 摘要:人工神经网络(ARTIFICIAL NEURAL NETWORK,简称ANN)是目前国际上一门发展迅速的前沿交叉学科。为了模拟大脑的基本特性,在现代神经科学研究的基础上,人们提出来人工神经网络的模型。根据此特点结合蕨类植物的生长过程进行了蕨类植物生长的模拟。结果表明,人工神经网络的模拟结果是完全符合蕨类植物的生长的,可有效的应用于蕨类植物的生长预测。 关键词:人工神经网络;蕨类植物;MATLAB应用 一人工神经网络的基本特征 1、并行分布处理:人工神经网络具有高度的并行结构和并行处理能力。这特别适于实时控制和动态控制。各组成部分同时参与运算,单个神经元的运算速度不高,但总体的处理速度极快。 2、非线性映射:人工神经网络具有固有的非线性特性,这源于其近似任意非线性映射(变换)能力。只有当神经元对所有输入信号的综合处理结果超过某一门限值后才输出一个信号。因此人工神经网络是一种具有高度非线性的超大规模连续时间动力学系统。 3、信息处理和信息存储合的集成:在神经网络中,知识与信息都等势分布贮存于网络内的各神经元,他分散地表示和存储于整个网络内的各神经元及其连线上,表现为神经元之间分布式的物理联系。作为神经元间连接键的突触,既是信号转换站,又是信息存储器。每个神经元及其连线只表示一部分信息,而不是一个完整具体概念。信息处理的结果反映在突触连接强度的变化上,神经网络只要求部分条件,甚至有节点断裂也不影响信息的完整性,具有鲁棒性和容错性。 4、具有联想存储功能:人的大脑是具有联想功能的。比如有人和你提起内蒙古,你就会联想起蓝天、白云和大草原。用人工神经网络的反馈网络就可以实现这种联想。神经网络能接受和处理模拟的、混沌的、模糊的和随机的信息。在处理自然语言理解、图像模式识别、景物理解、不完整信息的处理、智能机器人控制等方面具有优势。 5、具有自组织自学习能力:人工神经网络可以根据外界环境输入信息,改变突触连接强度,重新安排神经元的相互关系,从而达到自适应于环境变化的目的。 二人工神经网络的基本数学模型 神经元是神经网络操作的基本信息处理单位(图1)。神经元模型的三要素为: (1) 突触或联接,一般用,表尔神经元和神经元之间的联接强度,常称之为权值。 (2) 反映生物神经元时空整合功能的输入信号累加器。 图1 一个人工神经元(感知器)和一个生物神经元示意图 (3) 一个激活函数用于限制神经元输出(图2),可以是阶梯函数、线性或者是指数形式的
Modeling of Pyramidal Absorbers for an Anechoic Chamber Introduction In this example, a microwave absorber is constructed from an infinite 2D array of pyramidal lossy structures. Pyramidal absorbers with radiation-absorbent material (RAM) are commonly used in anechoic chambers for electromagnetic wave measurements. Microwave absorption is modeled using a lossy material to imitate the electromagnetic properties of conductive carbon-loaded foam. Perfectly matched layers Port Conductive pyramidal form Unit cell surrounded by periodic conditions Conductive coating on the bottom Figure 1: An infinite 2D array of pyramidal absorbers is modeled using periodic boundary conditions on the sides of one unit cell. Model Definition The infinite 2D array of pyramidal structures is modeled using one unit cell with Floquet-periodic boundary conditions on four sides, as shown in Figure 1. The geometry of one unit cell consists of one pyramid sitting on a block made of the same
准直TIR透镜的TracePro模拟过程 说明:本例只讲解我用TP的模拟过程,不是TP的使用手册之类,讲解有误或不清楚的地方请见谅。本例不讲解透镜的设计方法,请不要追问如何设计透镜。 最后提一个要求:不喜勿喷。 作者:虫洞里的猫 准直TIR透镜,是指在原点的点光源经过透镜后光线能平行出射的透镜,但由于LED的发光面都是面光源,因此LED经过此透镜后不可能是平行光出射,但其出光角度会是最小值。 本实例以已设计好的准直TIR透镜为例,逐步演示TracePro的模拟过程。 1.插入3D文件 TracePro可以打开多种3D格式的文件,最方便的是直接插入零件,但此过程只能使用.SAT格式的文件,如下图的过程。
如果你的3D文件是其它格式,如STEP等,则可以用TracePro直接打开,具体过程为:文件-打开,在打开的对话框的下拉菜单中选择合适的格式。 2.设置光源 2.1 设置档案光源 2.1.1 方法一 设置光源可以有很多方式,但最直接也最准确的是使用光源文件,在TracePro中也称为档案光源,TracePro可用的档案光源主要有.DAT或.RAY格式的。此文件可以从LED厂家的官网上下载,本实例使用的LED为CREE公司的XLamp XP-E。如下图,XP-E Cool White Optical Source Model - TracePro (zip) (42 MB)是适合TracePro使用的光源文件,其网站地址为:https://www.doczj.com/doc/e013584812.html,/LED-Components-and-Modules/Products/XLamp/Discrete-Directional/XLa mp-XPE。
第7章离散事件系统建模与仿真 离散事件系统指的是一组实体为了达到某些目的,以某些规则相互作用、关联而集合在一起。与连续事件系统不同,离散事件系统所包含的事件在时间上和空间上都是离散的。离散事件系统在生产和生活中是很常见的,例如一个超市就是一个离散事件系统,它由顾客和收银员组成。在离散事件系统中,各事件以某种顺序或在某种条件下发生,并且大都是随机性的,所以,其模型很难用某种规范的形式,一般采用流程图或者网络图的形式来定义实体在系统中的活动。这类系统在建模时,只要考虑系统内部状态发生变化的时间点和发生这些变化的原因,而不用描述系统内部状态发生变化的过程。本章将介绍几种常见的离散事件系统和离散事件系统建模方法。 7.1 离散事件系统模型 离散事件系统是指系统的状态仅在离散的时间点上发生变化的系统,而且这些离散时间点一般是不确定的。这类系统中引起状态变化的原因是事件,通常状态变化与事件发生是一一对应的。事件的发生没有持续性,可以看作在一个时间点上瞬间完成,事件发生的时间点是离散的,因而这类系统称为离散事件系统。首先看一个典型的离散系统的例子。 例7.1 超市服务系统 某理发店只有一名理发师。在正常的工作时间内,如果理发店没有顾客,则理发师空闲;如果有顾客,则为顾客理发。如果顾客到达理发店时,理发师正在为其他顾客服务,则新来的顾客在一旁排队等候。显然,每个顾客到达理发店的时间是随机的,而理发师为每个顾客服务的时间也是随机的,进而队列中每个顾客的等候时间也是随机的。 下面,结合例7.1介绍一下在离散事件系统仿真中所用到的一些基本概念。 (1)实体 实体是指有可区别性且独立存在的某种事物。在系统中,构成系统的各种成分称为实体,用系统论的术语,它是系统边界内的对象。在离散事件系统中,实体可分为两大类:临时实体和永久实体。临时实体指的是只在系统中存在一段时间的实体,这类实体由系统外部到达系统,在系统仿真过程中的某一时刻出现,最终在仿真结束前从系统中消失。例7.1中,顾客是临时实体,他们按一定的规律到达,经过理发师服务(可能要排队等待一段时间),最终离开系统。那些虽然达到,但未进入理发店的顾客则不能称为该系统的临时实体。永久实
2020 tracepro实验报告范文Contract Template
tracepro实验报告范文 前言语料:温馨提醒,报告一般是指适用于下级向上级机关汇报工作,反映情况, 答复上级机关的询问。按性质的不同,报告可划分为:综合报告和专题报告;按行 文的直接目的不同,可将报告划分为:呈报性报告和呈转性报告。体会指的是接触 一件事、一篇文章、或者其他什么东西之后,对你接触的事物产生的一些内心的想 法和自己的理解 本文内容如下:【下载该文档后使用Word打开】 一.实验概况 实验时间: 实验地点:合肥工业大学仪器学院平房实验室 指导老师:郎贤礼 实验要求:1.熟练TracePro软件基本功能及实际操作方法; 2.掌握光学器件设计的原理及一般步骤; 3.会对设计好的光学器件进行数据图像分析; 4.能够自己设计简单的光学器件。 二.实验内容 (一)软件介绍TracePro是一套普遍用于照明系统、光学分析、辐射度分析及光度分析的光线模拟软体。它是第一套以ACISsolidmodelingkernel为基本的光学软体。第一套结合真实固体模型、强大光学分析功能、资料转换能力强及易上手的使用介面的模拟软件。
TracePro可利用在显示器产业上,它能模仿所有类型的显示系统,从背光系统,到前光、光管、光纤、显示面板和LCD投影系统。应用领域包括:照明、导光管、背光模组、薄膜光学、光机设计、投影系统、杂散光、雷射邦浦常建立的模型:照明系统、灯具及固定照明、汽车照明系统(前头灯、尾灯、内部及仪表照明)、望远镜、照相机系统、红外线成像系统、遥感系统、光谱仪、导光管、积光球、投影系统、背光板。TracePro作为下一代偏离光线分析软件,需要对光线进行有效和准确地分析。为了达到这些目标,TracePro具备以下这些功能:处理复杂几何的能力,以定义和跟踪数百万条光线;图形显示、可视化操作以及提供3D实体模型的数据库;导入和导出主流CAD软件和镜头设计软件的数据格式。通过软件设计和仿真功能,可以:得到灯具的出光角度:只需有灯具的3D模块便可通过软件仿真功能预判灯具出光角度,以此判断灯具是否达到设计目标。得到灯具出光光斑图和照度图:可以模拟灯具打在不同距离得到的光斑、照度图分布情况,以此判断灯具出光性能。灯具修改建议功能:如果通过软件判断初步设计灯具性能不符合要求,TracePro光线可视图可以看到形成配光图每段曲线是由罩那段曲线形成,以提供修改建议。准配光图和IES文件:可导出标准配光图和IES文件,用于照明工程设计。实际效益通过软件的仿真功能,可以一次次在软件中完成灯具结构不同状态下时的出光性能,而不需每次灯具修改都需开模或做手板后测试才知道,这就大大缩短了产品开发周期、节省开模成本费用、提高产品设计准确性。
人工神经网络及其应用 摘要:神经网络是新技术领域中的一个时尚词汇。很多人听过这个词,但很少人真正明白它是什么。本文的目的是介绍关于人工神经网络的基本包括它的背景,发展,发展前景。 关键词:神经网络,发展,背景。 1 人工神经网络产生的背景 自古以来,关于人类智能本源的奥秘,一直吸引着无数哲学家和自然科学家的研究热情。生物学家、神经学家经过长期不懈的努力,通过对人脑的观察和认识,认为人脑的智能活动离不开脑的物质基础,包括它的实体结构和其中所发生的各种生物、化学、电学作用,并因此建立了神经元网络理论和神经系统结构理论,而神经元理论又是此后神经传导理论和大脑功能学说的基础。在这些理论基础之上,科学家们认为,可以从仿制人脑神经系统的结构和功能出发,研究人类智能活动和认识现象。另一方面,19世纪之前,无论是以欧氏几何和微积分为代表的经典数学,还是以牛顿力学为代表的经典物理学,从总体上说,这些经典科学都是线性科学。然而,客观世界是如此的纷繁复杂,非线性情况随处可见,人脑神经系统更是如此。复杂性和非线性是连接在一起的,因此,对非线性科学的研究也是我们认识复杂系统的关键。为了更好地认识客观世界,我们必须对非线性科学进行研究。人工神经网络作为一种非线性的、与大脑智能相似的网络模型,就这样应运而生了。所以,人工神经网络的创立不是偶然的,而是20世纪初科学技术充分发展的产物。 2 人工神经网络的发展 人工神经网络的研究始于40年代初。半个世纪以来,经历了兴起、高潮与萧条、高潮及稳步发展的远为曲折的道路。 1943年,心理学家W.S.Mcculloch和数理逻辑学家W.Pitts 提出了M—P模型,这是第一个用数理语言描述脑的信息处理过程的模型,虽然神经元的功能比较弱,但它为以后的研究工作提供了依据。1949年,心理学家D.O.Hebb提出突触联系可变的假设,根据这一假设提出的学习规律为神经网络的学习算法奠定了基础。1957 年,计算机科学家Rosenblatt 提出了著名的感知机模型,它的模型包含了现代计算机的一些原理,是第一个完整的人工神经网络,第一次把神经网络研究付诸工程实现。由于可应用于模式识别,联想记忆等方面,当时有上百家实验室投入此项研究,美国军方甚至认为神经网络工程应当比“原子弹工程”更重要而给予巨额资助,并在声纳信号识别等领域取得一定成绩。1960年,B.Windrow和E.Hoff提出了自适应线性单元,它可用于自适应滤波、预测和模式识别。至此,人工神经网络的研究工作进入了第一个高潮。 1969年,美国著名人工智能学者M.Minsky和S.Papert编写了影响很大的Perceptron一书,从理论上证明单层感知机的能力有限,诸如不能解决异或问题,而且他们推测多层网络的感知机能力也不过如此,他们的分析恰似一瓢冷水,很多学者感到前途渺茫而纷纷改行,原先参与研究的实验室纷纷退出,在这之后近10年,神经网络研究进入了一个缓慢发展的萧条期。这期间,芬兰学者T.Kohonen 提出了自组织映射理论,反映了大脑神经细胞的自组织特性、记忆方式以及神经细胞兴奋刺激的规律;美国学者S.A.Grossberg的自适应共振理论(ART );日本学者K.Fukushima提出了认知机模型;ShunIchimari则致力于神经网络
实验二离散事件系统仿真实验 目录 实验题目 (1) 一、实验目标 (1) 二、实验原理 (1) 1. 排队系统的一般理论 (1) 2. 离散系统常用的仿真策略 (2) 3. 本实验采用单服务台模型 (3) 4. 仿真运行方式 (3) 三、理论分析 (4) 1. 涉及的基本概念 (4) 2. 仿真的总体规划设计 (5) 四、建模过程 (7) 1. 思路分析 (7) 2. 仿真策略 (7) 3. 事件列表 (8) 4. 变量定义 (8) 5. 系统流程框图 (9) 五、仿真源程序(Matlab) (10) 六、结果分析 (12) 七、感受及建议 (15)
实验题目 实体(临时实体)到达模式:实体到达模式是顾客到达模式,设到达时间间隔Ai 服从均值5min A β=的指数分布 /1 ()(0) A A A f A e A ββ?=≥服务模式:设服务员为每个顾客服务的时间为Si .它也服从指数分布,均值为4min S β=/1 ()(0) S S s f S e S ββ?=≥服务规则:由于是单服务台系统,考虑系统顾客按单队排列,并按FIFO 方式服务 一、实验目标 通过单服务台排队系统的方针,理解和掌握对离散事件的仿真建模方法,以便对其他系统进行建模,并对其系统分析,应用到实际系统,对实际系统进行理论指导。 二、实验原理 1. 排队系统的一般理论 一般的排队系统都有三个基本组成部分:
(1)到达模式:指动态实体(顾客)按怎样的规律到达,描写实体到达的统计特性。通常假定顾客总体是无限的。 (2)服务机构:指同一时刻有多少服务设备可以接纳动态实体,它们的服务需要多少时间。它也具有一定的分布特性。通常,假定系统的容量(包括正在服务的人数加上在等待线等待的人数)是无限的。 (3)排队规则:指对下一个实体服务的选择原则。通用的排队规则包括先进先出(FIFO),后进先出(LIFO),随机服务(SIRO)等。 2. 离散系统常用的仿真策略 (1)事件调度法(Event Scheduling): 基本思想:离散事件系统中最基本的概念是事件,事件发生引起系统状态的变化,用事件的观点来分析真实系统。通过定义事件或每个事件发生系统状态的变化,按时间顺序确定并执行每个事件发生时有关逻辑关系。 (2)活动扫描法: 基本思想:系统有成分组成,而成分又包含活动。活动的发生必须满足某些条件,且每一个主动成分均有一个相应的活动例程。仿真过程中,活动的发生时间也作为条件之一,而且较之其他条件具有更高的优先权。 (3)进程交互法: 基本思想:将模型中的主动成分历经系统所发生的事件及活动,按时间发生的顺序进行组合,从而形成进程表。系统仿真钟的推进采