上海交大《自动控制理论》(含现代控制理论)考研大纲
《自动控制理论》
参考书目:
《自动控制理论与设计》(新世纪版) 徐薇莉、曹柱中、田作华编上海交通大学出版社2005.2 ;
《现代控制理论基础》施松椒、陈学中、杜秀华编著高等教育出版社2005.11
《自动控制原理》胡寿松编著国防工业出版社第四版
复习大纲:
经典控制部分:
第一章自动控制系统的基本概念;
自动控制系统的组成;
控制系统常用的典型测试信号;
对反馈控制系统的基本要求。
第二章系统微分方程式的建立;
传递函数的定义及求取方法
方块图变换的基本法则,转换为信号流图的方法;
用梅逊公式求取系统变量间的传递函数。
第三章实际物理系统数学模型建立;
机电控制系统数学模型建立;
第四章反馈控制系统稳定的基本概念;
劳斯判据的应用;
反馈控制系统稳态误差的概念及求取;
控制系统动态性能指标的定义;
一阶、二阶系统动态性能指标的求取;
掌握主导极点、附加零极点和偶极子的概念;
掌握高阶系统简化为二阶系统的条件;
掌握速度反馈控制、比例微分、比例积分控制的组成及作用。
第五章根轨迹的概念;
控制系统根轨迹的绘制;
利用根轨迹进行系统分析及计算系统性能指标。
第六章频率特性的定义,求法;
极坐标图及伯德图的绘制;
利用奈氏判据判别系统稳定性;
频域性能指标的定义及求取;
由实验曲线求取系统传递函数。
第七章系统校正的一般方法和基本概念;
常用校正网络特性;
据原系统特性和期望性能指标正确选择校正网络形式,熟练掌握根轨迹图和频率特性方法,设计超前网络、滞后网络和超前——滞后网络。
第八章非线性系统描述函数的定义,求取;
应用描述函数在极坐标图上判断系统稳定性,是否存在极限环,求取稳定极限环的振幅、频率;
相平面图的绘制,利用相平面图对典型非线性系统进行分析;
现代控制部分:
1.线性定常系统的状态空间描述、坐标变换(线性变换)及状态方程求解。2.线性定常系统的能控性与能观性,标准型以及能控性与能观性分解。3.状态空间描述与传递函数的关系,单变量系统的状态空间实现。
4.单变量系统的极点配置及观测器设计。
现代控制理论试题 Company number:【WTUT-WT88Y-W8BBGB-BWYTT-19998】
现代控制理论试题 一、名词解释(15分) 1、能控性 2、能观性 3、系统的最小实现 4、渐近稳定性 二、简答题(15分) 1、连续时间线性时不变系统(线性定常连续系统)做线性变换时不改变系 统的那些性质 2、如何判断线性定常系统的能控性如何判断线性定常系统的能观性 3、传递函数矩阵的最小实现A、B、C和D的充要条件是什么 4、对于线性定常系统能够任意配置极点的充要条件是什么 5、线性定常连续系统状态观测器的存在条件是什么 三、计算题(70分) 1、RC 无源网络如图1所示,试列写出其状态方程和输出方程。其中,为系统的输入,选两端的电压为状态变量,两端的电压为状态变量,电压为为系统的输出y。 2、计算下列状态空间描述的传递函数g(s) 图1:RC无源网络 3、求出下列连续时间线性是不变系统的时间离散化状态方程: 其中,采样周期为T=2. 4、求取下列各连续时间线性时不变系统的状态变量解和 5、确定是下列连续时间线性时不变系统联合完全能控和完全能观测得待定参数a的 取值范围: 6、对下列连续时间非线性时不变系统,判断原点平衡状态即是否为大范围渐 近稳定: 7、给定一个单输入单输出连续时间线性时不变系统的传递函数为 试确定一个状态反馈矩阵K,使闭环极点配置为,和。 现代控制理论试题答案 一、概念题 1、何为系统的能控性和能观性 答:(1)对于线性定常连续系统,若存在一分段连续控制向量u(t),能在有限时间区间[t0,t1]内将系统从初始状态x(t0)转移到任意终端状态x(t1),那么就称此状态是能控的。 (2)对于线性定常系统,在任意给定的输入u(t)下,能够根据输出量y(t)在有限时间区间[t0,t1]内的测量值,唯一地确定系统在t0时刻的初始状态x(t0 ),就称系统在t0时刻是能观测的。若在任意初始时刻系统都能观测,则称系统是状态完全能观测的,简称能观测的。
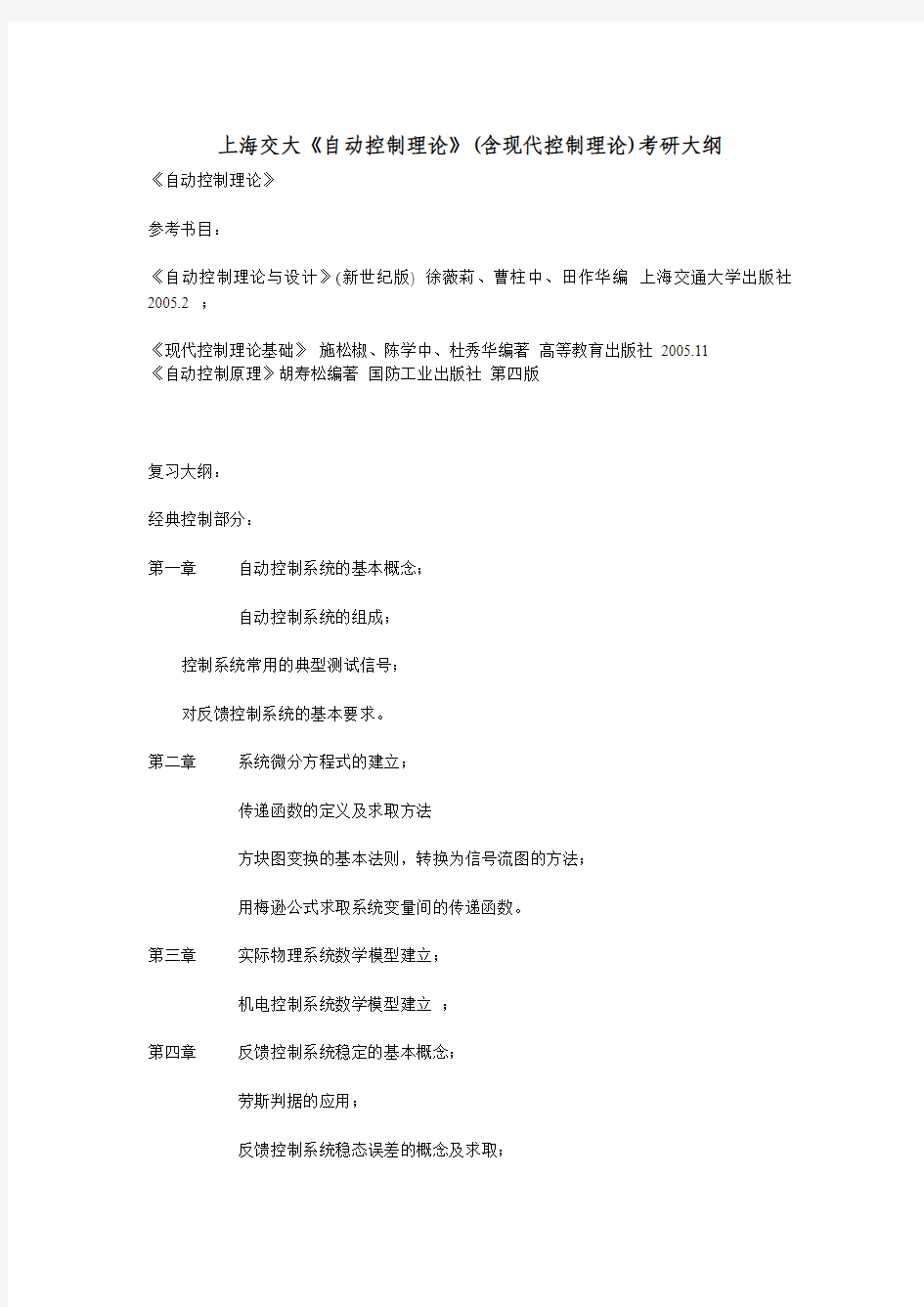
即 112442k g k f M L M ML θθθ??=-+++ ??? && 212 44k k g M M L θθθ??=-+ ??? && (2)定义状态变量 11x θ=,21x θ=&,32 x θ=,42x θ=& 则 一.(本题满分10分) 如图所示为一个摆杆系统,两摆杆长度均为L ,摆杆的质量忽略不计,摆杆末端两个质量块(质量均为M )视为质点,两摆杆中点处连接一条弹簧,1θ与2θ分别为两摆杆与竖直方向的夹角。当12θθ=时,弹簧没有伸长和压缩。水平向右的外力()f t 作用在左杆中点处,假设摆杆与支点之间没有摩擦与阻尼,而且位移足够小,满足近似式sin θθ=,cos 1θ=。 (1)写出系统的运动微分方程; (2)写出系统的状态方程。 【解】 (1)对左边的质量块,有 ()2111211 cos sin sin cos sin 222 L L L ML f k MgL θθθθθθ=?-?-?-&& 对右边的质量块,有 ()221222 sin sin cos sin 22 L L ML k MgL θθθθθ=?-?-&& 在位移足够小的条件下,近似写成: ()1121 24f kL ML Mg θθθθ=---&& ()2122 4kL ML Mg θθθθ=--&&
2 / 7 1221 334413 44244x x k g k f x x x M L M ML x x k k g x x x M M L =?? ???=-+++ ???? ? =????=-+? ????? &&&& 或写成 11 223 34401 000014420001000044x x k g k x x M L M f ML x x x x k k g M M L ? ? ?? ?????????? ??-+???? ???????????=+???? ????? ??????????????????? ????-+?? ? ? ?????? ? &&&& 二.(本题满分10分) 设一个线性定常系统的状态方程为=x Ax &,其中22R ?∈A 。 若1(0)1?? =??-??x 时,状态响应为22()t t e t e --??=??-?? x ;2(0)1??=??-??x 时,状态响应为 2()t t e t e --?? =??-?? x 。试求当1(0)3??=????x 时的状态响应()t x 。 【解答】系统的状态转移矩阵为()t t e =A Φ,根据题意有 221()1t t t e t e e --????==????--???? A x 22()1t t t e t e e --????==????--???? A x 合并得 2212211t t t t t e e e e e ----????=????----?? ??A 求得状态转移矩阵为 1 22221212221111t t t t t t t t t e e e e e e e e e -----------?????? ?? ==????????------???? ????A 22222222t t t t t t t t e e e e e e e e --------?? -+-+=??--??
西安交通大学2017年硕士研究生经金学院录取名单 1729019经金学院白岩松 1730019经金学院曾孝武 1731019经金学院柴富天 1732019经金学院陈思梦 1733019经金学院陈思妤 1734019经金学院陈玥欣 1735019经金学院程沛然 1736019经金学院丁桂坪 1737019经金学院董剑秋 1738019经金学院范灵瑜 1739019经金学院范鑫 1740019经金学院范炎芝 1741019经金学院付欢 1742019经金学院高峰 1743019经金学院高梦 1744019经金学院郭涵洋 1745019经金学院郭彦博 1746019经金学院韩瑾 1747019经金学院郝家馨 1748019经金学院洪江峰 1749019经金学院侯炳彰 1750019经金学院侯慧丽 1751019经金学院胡荣鑫 1752019经金学院黄娟丽 1753019经金学院黄梓衍 1754019经金学院冀佳瑞 1755019经金学院姜新 1756019经金学院荆壮壮 1757019经金学院孔威 1758019经金学院李冬 1759019经金学院李鹤书 1760019经金学院李令东 1761019经金学院李松芮 1762019经金学院李昱奇 1763019经金学院李忠雨
1764019经金学院梁珊珊1765019经金学院梁艺蓝1766019经金学院刘晨1767019经金学院刘静丹1768019经金学院刘佩1769019经金学院刘若鸿1770019经金学院刘雨生1771019经金学院刘禹恒1772019经金学院芦启明1773019经金学院路其远1774019经金学院罗丹玎1775019经金学院罗诗雪1776019经金学院吕薪宇1777019经金学院马俊洁1778019经金学院马瑞光1779019经金学院马文杰1780019经金学院孟瑜1781019经金学院南雪1782019经金学院牛天彤1783019经金学院尚天娇1784019经金学院石璞1785019经金学院史一雯1786019经金学院宋文豪1787019经金学院粟冬梅1788019经金学院孙小巧1789019经金学院谭娇1790019经金学院童星1791019经金学院汪伦1792019经金学院汪艺1793019经金学院王博援1794019经金学院王策1795019经金学院王力琛1796019经金学院王露宇1797019经金学院王琪雯1798019经金学院王小月1799019经金学院王艺桦1800019经金学院王云1801019经金学院韦同轲
《现代控制理论》实验课程教学大纲 1.实验课名称:现代控制理论 2.实验课程名称(英文):Modern Control Theory 3.课程代码:X040206 4.实验课程性质:非独立设课 5.学时:10 6.学分: 7.适用专业:自动化、电气工程及其自动化 8.先修或同修课程:高等数学、线性代数、电路学、自动控制原理 9.开课单位:机电工程学院电气工程及自动化实验室 10.制定实验教学大纲的依据: 根据教学大纲的要求、设定实验内容 11.本实验课在培养实验能力的地位及作用: 《现代控制理论》课程是自动化、电气工程及其自动化专业一门理论性和实践性很强的专业课。通过本实验课的学习,使学生进一步理解与掌握系统建模的状态空间表达的基本思想方法,闭环控制系统分析与综合的基本原理;培养学生工程实践动手能力、分析问题及解决问题的能力,掌握现代控制理论的计算机模拟及稳定性能测试方法,使理论教学得到有效的巩固与提高。 12.应达到的实验能力标准:简单控制系统的分析和综合应用等。 13.实验内容 (1)系统的传递函数阵和状态空间表达式的转换 学习多变量系统状态空间表达式的建立方法、了解统状态空间表达式与传递函数相互转换的方法,通过编程、上机调试,掌握多变量系统状态空间表达式与传递函数相互转换方法。 (2)多变量系统的能控性判别与稳定性分析 学习多变量系统状态能控性及稳定性分析的定义及判别方法,通过用MATLAB编程、
上机调试,掌握多变量系统能控性及稳定性判别方法。 (3)多变量系统的能观性判别与稳定性分析 学习多变量系统状态能观性及稳定性分析的定义及判别方法,通过用MATLAB编程、上机调试,掌握多变量系统能观性及稳定性判别方法。 (4)通过状态反馈实现控制系统的极点配置 了解和掌握闭环控制系统极点配置的设计步骤,对工程中常见的控制系统进行极点配置设计。 (5)状态观测器的设计 了解和掌握状态观测器的基本特点,设计控制系统的全状态观测器。 14.实验成绩考核办法 每次实验结束后,学生必须提交实验报告。根据学生实验操作、实验内容、完成的情况,实验报告完成的质量,评定实验成绩。实验成绩五级制,分为优秀、良好、中等、及格、不及格。 实验报告必须使用专用实验报告纸内容书写,学生应独立完成实验报告的书写,严禁抄袭、复印,否则实验成绩为不及格。 15.实验教材、参考资料: 现代控制理论实验教材
第二章 控制系统的状态空间描述 小结 一、建模:状态空间描述(现代控制:内部描述) 1、对象:① 线性时不变系统;② 离散时间系统;③ 时变系统;④ 非线性系统。 2、模型形式(状态空间表达式): ① 一阶微分方程组(一阶差分方程组);② 向量-矩阵形式; ③ 系统方框图;④ 状态变量图。 3.方法(途径): ①(已知)系统机理→(求)状态空间表达式; ②(已知)输入输出描述(经典控制:外部描述)?????→实现问题(求)状态空间表达 式(现代控制:内部描述) a 、(已知)方块图→(求)状态空间表达式; 方块图?????→无零点惯性环节有零点惯性环节二阶振荡环节 状态变量图?????????→将积分器的输出作为状态变量状态空间描述 b 、(已知)传递函数阵/高阶微分方程(脉冲传递函数阵/高阶差分方程)→(求)状态空间表达式 ))a b ????????????无零点实现:能控标准型、能观标准型 直接分解法:能控标准型、能观标准型最小实现有零点实现串联分解法(串联实现)并联分解法(并联实现或约旦标准型实现):无重极点;有重极点 二、状态变量的线性变换 1、系统状态空间表达式的非唯一性 2、系统的不变性 ① 特征值不变性/特征多项式系数(特征方程)不变性; ② 传递函数矩阵不变性; ③ 系统的能控性与能观性不变性。 3、状态空间表达式→约旦标准型 三、状态空间表达式(现代控制:内部描述)→传递函数阵(经典控制:外部描述) 1. 已知()()()()()()()()()()x t A t x t B t u t y t C t x t D t u t ???=+= +,求传递函数1()()()adj s s G s s s --+-=-+=-C I A B D I A C I A B D I A 四、组合系统 1.(已知)若干子系统的并联、串联、输出反馈联结→(求)状态空间描述或传递函数阵
西安交通大学建筑学考研经验分享 我15级建筑学,今年2020考西安交通大学,总分300。政67英52专一105专二76今天是3月18号,现在在准备调剂,但是这个总分比较低,不好调。专业课二不是快题,是公共建筑设计原理,其我之前已经看过往年的真题,也做过相关的题,今年的题感觉也挺简单,没有难度。,结果分数这么低。,之前看到另一个也是80多,所以感觉有压分,希望大家慎重报考。而且往年录取中一般都是学硕调专硕来的。学硕保送多,感觉可能就是看你本科好不好了。所以再次提醒报考要慎重。有很多学校建筑学没过评估,但是也招建筑方向,这些学校会简单很多。可以看看这些学校,比如广东工业的土木水利,贵州大学土木水利,之类的。 虽然大家都想考名校,但是还是有风险的。,,,, 我的贴子就当作反面吧,成绩太水,但希望可以帮助今年考研的学弟学妹少走些弯路。(文章比较啰嗦。)考研算是我刚上大学就有的念头,原因是对高考成绩的不满意,又不想再读一年。但老实说,大学几年,不管是完成专业作业,还是其他,都抱着过了就好的心态,虽能理解自己,但着实可惜,但考研的念头却未曾熄灭。既然要考,就要做一定的心理准备,因为真的会遇到很多事。首先是学校的选择,考研首先是一场信息战,前期一定要找好资料,大家都是奔着专业名校去的,以我们建筑学为例,老八校,新四校,过了专业评估的,或者沿海发达城市都是首选,比如深圳大学,每年算上保送的(我们学校没资格),每年录取100多个,但考试的就有4,5百个(具体忘了,
官网有数据可查),竞争激烈,而且由于生源好,深大评卷是压分的,及所谓的水区,旱区,同样的分数,不同学校,成绩相同,含金量不同。 我们前期首先要去研招网上查 1.想报考专业的开设学校,不管是专硕还是学硕(你调剂时不会介意是什么学校,想的都是有学上就好),然后去开办这些学校的官网,查往年录取名单,这个都会有,(若没有,可以去考研帮等网站,app查),根据考生考试编号前5位,(即报考学校)和招生院校代码(网上有excel表格汇总,查起来还好,不麻烦)看出一志愿和调剂的学生分别有多少,看看调剂的学生一志愿是哪里,但注意,这只是他报考的学校,不是他本科的学校,本科说不定很差,,, 2.查往年招生简章和招生目录,看看具体考什么,参考书有什么(有的直接给出复试科目了),因为专业课除统考外,都是自己命题的,也就是说,不同学校考的题是不一样的,难度也不同,比如我们建筑学,一般初试考建筑史和快题,但有的学校初试不考快题,有的建筑史是综合了建筑物理,建筑构造等,因此,一定弄清考什么。 3.我现在在准备调剂,最大的感受是,难,因为除了34所自主划线学校外,你一志愿过国家线的话,有很大机会可以参加复试(这要看招生计划,和计划录取人数,很多学校出成绩是会给个成绩排名,你结合下你的排名,招生人数,往年数据等,就可以估计出能不能进复试)(步骤是这样的:1.先出初试成绩-2.一个月左右34所出复试线3.国家线公布 4.34所复试 5.预调剂系统开启, 6.调剂系统开启 7.普通
《现代控制理论A》课程教学大纲 大纲执笔人:李益华大纲审核人: 课程编号:0811000374 英文名称:Modern Control Theory 学分:2.5 总学时:40 。其中,讲授40学时,实验0学时,上机0 学时,实训0 学时。适用专业: 自动化专业的本科生 先修课程:高等数学、线性代数、积分变换、电路、电子技术、微机原理与应用、 自动控制原理等 一、课程性质与教学目的 本课程是自动化专业的技术基础课。现代控制理论是经典控制理论的发展理论,从时间划分,现代控制理论处在智能控制理论之前。学生在学习了经典控制理论单输入单输出(SISO)系统的分析设计方法之后,进一步学习现代控制理论,通过学习掌握状态空间分析控制系统动态特性的方法,能够利用极点配置与状态观测理论,初步掌握对控制系统进行分析与综合,对于实现复杂系统的控制奠定理论基础。 二、基本要求 1、明确现代控制理论的任务,掌握控制系统状态空间表达式的建立,熟练状态空间表达式的几种转换关系。 2、掌握状态转移函数及其状态空间表达式的求解; 3、掌握线性控制系统的能控性和能观性的判别方法,理解状态空间表达式的能控标准型和能观标准型,掌握线性系统的结构分解,了解传递函数的实现等。 4、掌握李雅普诺夫稳定判据第一方法与第二方法,熟悉李雅普诺夫方法在线性系统与非线性系统中的应用。 5、掌握线性定常系统的极点配置、系统镇定、了解系统解耦、状态观测器,利用状态观测器实现状态反馈。 三、重点与难点 重点:求线性时不变连续系统矩阵指数函数;线性时不变连续系统的解;线性时不变连续系
统的离散化;线性时不变连续系统能控、能观、约当标准型以及线性变换成标准型;由状态空间表达式求传递函数矩阵;线性时不变连续系统能控、能观、约当标准型以及线性变换成标准型;由状态空间表达式求传递函数矩阵;通过状态反馈任意配置极点的充要条件及设计方法;系统能镇定的充分充要条件;状态观测器存在的条件及设计方法. 难点:特征向量的求法、线性变换成各种标准型特征向量的求法、线性变换成各种标准型求各种系统的状态转移矩阵、系统状态按能控性、能观性分解的方法、非线性系统李雅普诺夫函数的求法、降维观测器的设计。 四、教学方法 采用理论教学与Matlab仿真相结合的原则,同时采用课堂教学、案例教学相结合。 五、课程知识单元、知识点及学时分配
现代控制理论基础考试题 西北工业大学考试题(A卷) (考试时间120分钟) 学院:专业:姓名:学号: ) 一.填空题(共27分,每空分) 1.现代控制理论基础的系统分析包括___________和___________。 2._______是系统松弛时,输出量、输入量的拉普拉斯变换之比。 3.线性定常系统齐次状态方程是指系统___________时的状态方程。 4.推导离散化系统方程时在被控对象上串接一个开关,该开关以T为周期进 行开和关。这个开关称为_______。 5.离散系统的能______和能______是有条件的等价。 6.在所有可能的实现中,维数最小的实现称为最小实现,也称为__________。 7.构造一个与系统状态x有关的标量函数V(x, t)来表征系统的广义能量, V(x, t)称为___________。8." 9.单输入-单输出线性定常系统,其BIBO稳定的充要条件是传递函数的所有 极点具有______。 10.控制系统的综合目的在于通过系统的综合保证系统稳定,有满意的 _________、_________和较强的_________。 11.所谓系统镇定问题就是一个李亚普诺夫意义下非渐近稳定的系统通过引入_______,以实现系统在李亚普诺夫意义下渐近稳定的问题。 12.实际的物理系统中,控制向量总是受到限制的,只能在r维控制空间中某一个控制域内取值,这个控制域称为_______。 13._________和_________是两个相并行的求解最优控制问题的重要方法。二.判断题(共20分,每空2分) 1.一个系统,状态变量的数目和选取都是惟一的。(×) 2.传递函数矩阵的描述与状态变量选择无关。(√) 3.状态方程是矩阵代数方程,输出方程是矩阵微分方程。(×) 4.对于任意的初始状态) ( t x和输入向量)(t u,系统状态方程的解存在并且惟一。(√) 5.( 6.传递函数矩阵也能描述系统方程中能控不能观测部分的特性。(×) 7.BIBO 稳定的系统是平衡状态渐近稳定。(×)
【考研经验】2015年西安交通大学社会学考研经验分享西安交通大学社会学的研究生考试我参加了两次,所以有很切身的体会,也稍微总结了一些经验。尤其是在第一次失败之后,痛定思痛,报了一个新祥旭的专业课,在专业课的老师带领下,及时纠正自己在复习方面的很多错误理解以及很多不切实际的方法。尽管每个人都有自己的学习方法,也没有可以统一的学习捷径,但是我希望自己的一点微薄之谈和结合新祥旭老师的方法能对在考验路上奔波的你有一点点的帮助,所以在此我把自己的学习教训和如何及时修正自己当作一点经验告诉大家,当然这只是我个人的方法,各位还是应该结合自己的实际情况,从自己从发指定切实可行的计划。 如果说是经验的话,我觉得考研最重要的是两个方面,一个是心理,另外一个具体方法。心理是最重要的,一旦你的精神强大,就可以支撑你做所有的事,哪怕这件事你从未涉足,但抱着愚公移山的精神终能克服,考研是一个长期的过程,一个非常寂寞的过程,在这条路上,也许你要牺牲掉很多你自认为美好的时间和东西,而且没有人能够帮到你,完完全全是一个人的战争,这场战争中内心强大的人会笑到最后,内心懦弱的人往往会在最后一刻倒下,熬不到曙光的来临。 大学本科期间,由于我对社会学专业并没有太大兴趣,所以一直没找到学习本专业的兴奋点,因此对于专业课的学习很懈怠,几乎可以说四年基本没学到任何的知识,考研对于我来说完全是一个重新出发的过程。当自己决定要读研的时候,仍然毫不犹豫的决定考西交大,对,就是西交大,西交大一直是我小时候的
梦想。是梦想就该去实现,给人生才不至于留遗憾,人生中有很多次挑战,也有很多次的机遇,每个人所能达到的高度,所能完成的梦想完全在于他对自己对世界的理解,在于一瞬间的抉择。所以尽管那时候我几乎连什么是社会学都不清楚,很多西方社会学家我也基本不认识,可是我完全相信自己可以达到梦想,这就是一个人的信仰,我信仰自己的理想终可以达成,只要确定好梦想,即使再累再苦也可以坚持,因为西交大是我梦寐以求的地方。现在也许有一个学习不太好的人有一天告诉你,我要考西交大,不要去嘲笑别人,要为别人的这份勇气点赞,你永远不能估量一个人的潜力到底有多大。我觉得只要我想,我一定可以实现,一年实现不了,我会耐心更有韧劲的两年去实现,所以我没有天赋,也没有更良好的基础,通过努力还能实现自己的人生目标,而你们都有很好的基础了或者过人的天赋,西交大社会学就更不是鲤鱼翻不过的龙门。所以考研的第一步也是最重要的一步,是要对自己有超强的信心,也不要过高估计西交大的难度,在战略上藐视它,进而才能战胜它。否则在漫长而压力大的复习历程中,会有很多想放弃的时候,有信心才会有坚持的韧劲和源泉。 如我来说,我向来都是一个内心很自信的人,我认为别人能办到的我照样能办到,所以我从来不羡慕任何人,即使有很多传授经验的人,我也觉得自己的东西才最好,因为这件事你做到了,那么很好,大家都会觉得你很了不起,无论你是通过什么手段达到,或者你是不是因为努力,而一旦你失败了,即使你曾经非常的努力,那对不起,没人愿意再听你的倾述。所以即使是很小的因素都可能导致你的失败让你功亏一篑,那么我们就要在努力的过程中付出比别人多出十倍的努力,每一处细节都尽量做到最好。在一年多的复习过程中,我知道自己资质平
《自动控制理论II》课程教学大纲 【课程代码】:22315168 【英文译名】:Automatic Control Theory II 【适用专业】:自动化 【学分数】:2.5 【总学时数】:40 【实践学时】:0 一、本课程教学目的和课程性质 《自动控制理论II》是自动控制理论I的后续课程,是自动化专业的专业基础课。学生通过本门课程学习,在离散系统分析、单输入单输出线性定常系统的状态空间模型的建立、线性变换及规范化、状态方程的求解、系统可控性与可观测性的研究以及状态反馈与状态观测器的设计等方面具备必要的知识,为学生深入研究线性系统及其他有关现代控制理论的后续课程和从事工业控制系统的设计与改造打好基础。 二、本课程的基本要求 (一) 基本原理 1.熟悉离散系统的基本概念;掌握离散控制系统的理论和分析方法; 2.熟悉状态空间的基本概念及相关术语; 3.会建立系统的状态空间表达式,了解通过线性变换变成标准型法; 4.掌握状态转移矩阵法,会求解线性系统状态方程的解; 5.掌握系统能控性和能观性的概念及判据; 6.掌握状态反馈方法,了解状态观测器; 7.理解控制系统的李雅普诺夫稳定性概念。 (二) 获得以下基本技能 1.初步掌握计算机控制系统设计的理论方法; 2.掌握线性控制系统的状态空间分析法; 3.能用状态空间法进行控制系统的综合设计; 4.基本学会用MATLAB对控制系统进行典型分析。 三、本课程与其他课程的关系(前修课程要求,后继课程等) 前修课程:自动控制理论I,微分方程,线性代数,复变函数
后继课程:运动控制,过程控制,计算机控制系统等 四、课程内容 1.离散控制系统 知识点:计算机控制系统组成;采样过程;采样定理;零阶保持器;Z变换定义及计算方法;Z变换基本定理;Z反变换及计算方法;线性差分方程及求解;环节的脉冲传递函数;闭环脉冲传递函数;(纯)离散系统方框图及其简化;Z平面的稳定性分析;朱利稳定判据;数字控制系统的暂态、稳态、误差分析。 重点:采样定理、零阶保持器;带有零阶保持器环节的脉冲传递函数计算;闭环脉冲传递函数计算;系统性能分析。 难点:绘制(纯)离散系统方框图;典型计算机控制系统设计方法。 2.线性系统的状态空间模型 知识点:状态空间描述的基本概念;线性时不变系统状态空间模型;输入输出描述转换为状态空间模型;状态方程的标准形。 重点:系统状态空间描述;状态空间的标准形。 难点:状态空间的概念及状态方程的建立;状态转移阵和系统性能的关系。 3.线性系统的运动分析 知识点:状态空间描述的传递函数矩阵计算;特征多项式和特征值;线性定常系统的运动分析、状态转移阵、脉冲响应阵;线性连续系统的离散化;离散状态空间分析。 重点:状态转移矩阵及其计算。 难点:状态转移矩阵和系统性能的关系。 4.线性系统的能控性和能观测性 知识点:能控性和能观性的定义;能控标准形和能观标准形;能控性和能观性的判据。 重点:能控性和能观性标准形,能控和能观判据。 难点:能控性和能观性与系统性能之间的关系。 5.线性系统的状态空间综合 知识点:状态反馈和输出反馈;极点配置;状态观测器;引入状态观测器的状态反馈系统特性。 重点:状态反馈、极点配置法设计线性控制系统。 难点:极点配置与系统性能的关系。 6.李雅普诺夫稳定性分析 知识点:李亚普诺夫意义下运动稳定性的基本概念;李亚普诺夫第二法主要定理;系统运动稳定性判据。
西北工业大学考试试题(卷)2008 -2009 学年第2 学期
2009年《现代控制理论》试卷A 评分标准及答案 第一题(10分,每个小题答对1分,答错0分) (1)对 (2)错 (3)对 (4)错 (5)对 (6)对 (7)对 (8)对 (9)对 (10)错 第二题(15分) (1))(t Φ(7分):公式正确3分,计算过程及结果正确4分 ? ? ? ???+-+---=-=Φ?? ?? ??????+- +-+- +-+- ++-+=??????-+++=-??? ???+-=------------t t t t t t t t e e e e e e e e A sI L t s s s s s s s s s s s s A sI s s A sI 22221 11 2222}){()(22112 21221112112 213)2)(1(1 )(321 (2) 状态方程有两种解法(8分):公式正确4分,计算过程及结果正确4分 ??????-+-+-=????? ???????+-+++-+++-++??????+--=??????????? ???????++-++++-=-+-=??????---+-=????? ?+--+??? ???+--=??????-Φ+Φ=------------------------------??t t t t t t t t t t t t t t t t t t t t t e e te e e te s s s s s s L e e e e t x t x s s s s s L x A sI L t x s BU A sI x A sI s X e e t e e t d e e e e e e e e e t x t x d t Bu x t t x 222 21 22212 21111122)(02222210 2344}2414)1(42212)1(4 {2)()(} )2()1(4) 2()1()3(2{)}0(){()() ()()0()()(2)34()14(22222)()()()()0()()(或者 ττ τττττττ 第三题(15分,答案不唯一,这里仅给出可控标准型的结果) (1) 系统动态方程(3分) []x y u x x 0010 1003201 00010=???? ??????+??????????--=&
现代控制理论试题及答案 一、(10分)考虑如图的质量弹簧系统。其中,m 为运动物体的质量,k 为弹簧的弹性系数,h 为阻尼器的阻尼系数,f 为系统所受外力。取物体位移为状态变量x 1,速度为状态变量x 2,并取位移为系统输出y ,外力为系统输入u ,试建立系统的状态空间表达式。 解 f ma =……………………………….……1分 令位移变量为x 1,速度变量为x 2,外力为输入u ,有 122u kx kx mx --=&………………………………2分 于是有 12x x =&………………………………..……………1分 2121 k h x x x u m m m =- -+&……….….……………….2分 再令位移为系统的输出y ,有 1y x =…………………………….……….1分 写成状态空间表达式,即矩阵形式,有 11 220101x x u k h x x m m m ???? ????????=+???? ????--?? ?????? &&………..……………..2分 []1210x y x ?? =???? ……………………..……….……….2分 二、(8分)矩阵A 是22?的常数矩阵,关于系统的状态方程式=&x Ax ,有 1(0)1??=??-??x 时,22t t e e --??=??-??x ;2(0)1?? =??-??x 时,2t t e e --??=??-?? x 。 试确定状态转移矩阵(,0)t Φ和矩阵A 。 解 因为系统的零输入响应是 ()(,0)(0)t t =x x Φ……………..……….……….2分 所以
221(,0)1t t e t e --????=????--???? Φ,22(,0)1t t e t e --???? =????--????Φ 将它们综合起来,得 22122(,0)11t t t t e e t e e ----???? =????---?? ??Φ……………….……….2分 1 22222222122(,0)11122112222t t t t t t t t t t t t t t t t e e t e e e e e e e e e e e e e e -----------------???? =????----?? ??--????=????--??????--=??--?? Φ …………….……….2分 而状态转移矩阵的性质可知,状态转移矩阵0(,)t t Φ满足微分方程 ()()00,,d t t t t dt =A ΦΦ 和初始条件 ()00,t t =I Φ 因此代入初始时间00t =可得矩阵A 为: 01000 22220 (,)(,) 222424t t t t t t t t t t t d t t t t dt e e e e e e e e -==--------=?? =??????-+-+=??-+-+??A ΦΦ…………….……….1分 0213?? =?? --?? …………………………………….……….1分 三、(10分)(1)设系统为 ()()()011, (0)011a t t u t x b -?????? =+=?????? -?????? &x x 试求出在输入为(0)u t t =≥时系统的状态响应(7分)。 (2)已知系统[]011, 11341u y ???? =+=-?? ??-???? &x x x ,写出其对偶系统(3分)。 解 (1)
现代控制理论试题 一、名词解释(15分) 1、能控性 2、能观性 3、系统的最小实现 4、渐近稳定性 二、简答题(15分) 1、连续时间线性时不变系统(线性定常连续系统)做线性变换时不改变系统的那些性 质? 2、如何判断线性定常系统的能控性?如何判断线性定常系统的能观性? 3、传递函数矩阵错误!未找到引用源。的最小实现A、B、C和D的充要条件是什么? 4、对于线性定常系统能够任意配置极点的充要条件是什么? 5、线性定常连续系统状态观测器的存在条件是什么? 三、计算题(70分) 1、RC无源网络如图1所示,试列写出其状态方程和输出方程。其中,错误!未找到引用源。为系统的输入,选错误!未找到引用源。两端的电压为状态变量错误!未找到引用源。,错误!未找到引用源。两端的电压为状态变量错误!未找到引用源。,电压错误!未找到引用源。为为系统的输出y。 图1:RC无源网络 2、计算下列状态空间描述的传递函数g(s) 3、求出下列连续时间线性是不变系统的时间离散化状态方程: 其中,采样周期为T=2. 4、求取下列各连续时间线性时不变系统的状态变量解错误!未找到引用源。和错误! 未找到引用源。
5、确定是下列连续时间线性时不变系统联合完全能控和完全能观测得待定参数a的 取值范围: 6、对下列连续时间非线性时不变系统,判断原点平衡状态即错误!未找到引用源。是 否为大范围渐近稳定: 7、给定一个单输入单输出连续时间线性时不变系统的传递函数为 试确定一个状态反馈矩阵K,使闭环极点配置为错误!未找到引用源。,错误!未找到引用源。和错误!未找到引用源。。
现代控制理论试题答案 一、概念题 1、何为系统的能控性和能观性? 答:(1)对于线性定常连续系统,若存在一分段连续控制向量u(t),能在有限时间区间[t0,t1]内将系统从初始状态x(t0)转移到任意终端状态x(t1),那么就称此状态是能控的。 (2)对于线性定常系统,在任意给定的输入u(t)下,能够根据输出量y(t)在有限时间区间[t0,t1]内的测量值,唯一地确定系统在t0时刻的初始状态x(t0 ),就称系统在t0时刻是能观测的。若在任意初始时刻系统都能观测,则称系统是状态完全能观测的,简称能观测的。 2、何为系统的最小实现? 答:由传递函数矩阵或相应的脉冲响应来建立系统的状态空间表达式的工作,称为实现问题。在所有可能的实现中,维数最小的实现称为最小实现。 3、何为系统的渐近稳定性? 答:若错误!未找到引用源。在时刻错误!未找到引用源。为李雅普若夫意义下的稳定,且存在不依赖于错误!未找到引用源。的实数错误!未找到引用源。和任意给定的初始状态错误!未找到引用源。,使得错误!未找到引用源。时,有错误!未找到引用源。,则称错误!未找到引用源。为李雅普若夫意义下的渐近稳定 二、简答题 1、连续时间线性时不变系统(线性定常连续系统)做线性变换时不改变系统的那些性 质? 答:系统做线性变换后,不改变系统的能控性、能观性,系统特征值不变、传递函数不变 2、如何判断线性定常系统的能控性?如何判断线性定常系统的能观性? 答:方法1:对n维线性定常连续系统,则系统的状态完全能控性的充分必要条件为:错误!未找到引用源。。 方法2:如果线性定常系统的系统矩阵A具有互不相同的特征值,则系统能控的充要条件是,系统经线性非奇异变换后A阵变换成对角标准形,且错误!未找到引用源。不包含元素全为0的行 线性定常连续系统状态完全能观测的充分必要条件是能观性矩阵错误!未找到引用源。满秩。即:错误!未找到引用源。 3、传递函数矩阵错误!未找到引用源。的最小实现A、B、C和D的充要条件是什么?
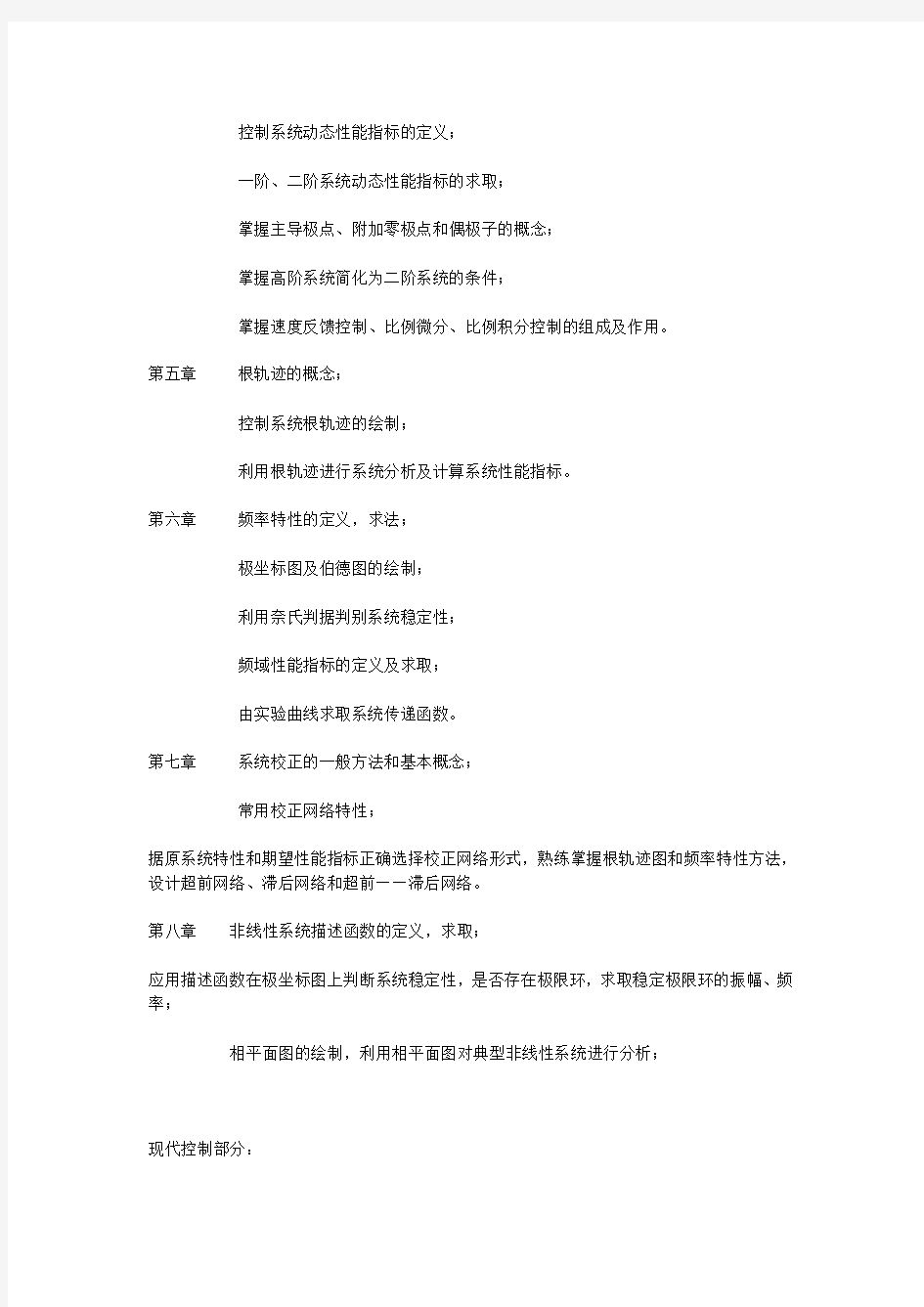
一.(本题满分10分) 请写出如图所示电路当开关闭合后系统的状态方程和输出方程。其中状态变量的设置如图所示,系统的输出变量为流经电感2L 的电流强度。 【解答】根据基尔霍夫定律得: 1113222332 1L x Rx x u L x Rx x Cx x x ++=?? +=??+=? 改写为1 13111 22 322 312 11111R x x x u L L L R x x x L L x x x C C ? =--+?? ?=-+???=-?? ,输出方程为2y x = 写成矩阵形式为
[]11 111222 2 331231011000110010R L L x x L R x x u L L x x C C x y x x ??? --???????????????? ???????=-+???? ??????? ??????????????? ? ???-?????? ? ? ??? ?? ?=??? ?????? 二.(本题满分10分) 单输入单输出离散时间系统的差分方程为 (2)5(1)3()(1)2()y k y k y k r k r k ++++=++ 回答下列问题: (1)求系统的脉冲传递函数; (2)分析系统的稳定性; (3)取状态变量为1()()x k y k =,21()(1)()x k x k r k =+-,求系统的状态空间表达式; (4)分析系统的状态能观性。 【解答】 (1)在零初始条件下进行z 变换有: ()()253()2()z z Y z z R z ++=+ 系统的脉冲传递函数: 2()2 ()53 Y z z R z z z +=++ (2)系统的特征方程为 2()530D z z z =++= 特征根为1 4.3z =-,20.7z =-,11z >,所以离散系统不稳定。 (3)由1()()x k y k =,21()(1)()x k x k r k =+-,可以得到 21(1)(2)(1)(2)(1)x k x k r k y k r k +=+-+=+-+ 由已知得 (2)(1)2()5(1)3()y k r k r k y k y k +-+=-+-112()5(1)3()r k x k x k =-+- []212()5()()3()r k x k r k x k =-+-123()5()3()x k x k r k =--- 于是有: 212(1)3()5()3()x k x k x k r k +=--- 又因为 12(1)()()x k x k r k +=+ 所以状态空间表达式为
西北工业大学考试试题(卷) 2008 -2009 学年第2 学期 ? 2? 设系统的传递函数为
[y b =21x x kx =-- · @
} 2009年《现代控制理论》试卷A 评分标准及答案 第一题(10分,每个小题答对1分,答错0分) (1)对 (2)错 (3)对 (4)错 (5)对 (6)对 (7)对 (8)对 (9)对 (10)错 第二题(15分) (1))(t Φ(7分):公式正确3分,计算过程及结果正确4分 ? ? ? ???+-+---=-=Φ?? ?? ??????+- +-+-+-+- ++-+=??????-+++=-? ?? ???+-=------------t t t t t t t t e e e e e e e e A sI L t s s s s s s s s s s s s A sI s s A sI 22221 11 2222}){()(22112 2 1221112112213)2)(1(1 )(321 (2) 状态方程有两种解法(8分):公式正确4分,计算过程及结果正确4分 ??????-+-+-=????? ???????+-+++-+++-++??????+--=??????????? ???????++-++++-=-+-=??????---+-=????? ?+--+??? ???+--=??????-Φ+Φ=------------------------------??t t t t t t t t t t t t t t t t t t t t t e e te e e te s s s s s s L e e e e t x t x s s s s s L x A sI L t x s BU A sI x A sI s X e e t e e t d e e e e e e e e e t x t x d t Bu x t t x 222 21 22212 21111122)(02222210 2344}2414)1(42212)1(4 {2)()(} )2()1(4) 2()1()3(2{)}0(){()() ()()0()()(2)34()14(22222)()()()()0()()(或者 ττ τττττττ *
西安交通大学2017年硕士研究生材料学院录取名单 235002材料学院安怡 236002材料学院蔡亚辉 237002材料学院曹慧颖 238002材料学院陈冰 239002材料学院陈金梅 240002材料学院陈睿 241002材料学院陈彤 242002材料学院陈逸飞 243002材料学院陈雨晗 244002材料学院程露 245002材料学院丁梦杨 246002材料学院郭志雄 247002材料学院韩嘉琪 248002材料学院郝润姿 249002材料学院何利强 250002材料学院何玉婷 251002材料学院洪政凯 252002材料学院侯岳显 253002材料学院黄润秋 254002材料学院纪利杰 255002材料学院井伟涛 256002材料学院寇聪聪 257002材料学院雷文雅 258002材料学院李佳佳 259002材料学院李晶 260002材料学院李培 261002材料学院李天宇 262002材料学院李响 263002材料学院李艳杰 264002材料学院李颖 265002材料学院李育仁 266002材料学院李紫璇 267002材料学院林保均 268002材料学院林昊文 269002材料学院刘南君
270002材料学院刘桥271002材料学院刘清272002材料学院刘睿璇273002材料学院刘思雨274002材料学院刘伊275002材料学院罗俊强276002材料学院骆宇飞277002材料学院马帅278002材料学院戚俊甫279002材料学院史坤坤280002材料学院孙银秋281002材料学院谭陵282002材料学院唐春华283002材料学院万明佳284002材料学院王俊伟285002材料学院王佩286002材料学院王鑫垚287002材料学院王裕华288002材料学院王远航289002材料学院王芝萍290002材料学院王子圳291002材料学院谢文琦292002材料学院徐亮293002材料学院许雅文294002材料学院杨博295002材料学院杨浩296002材料学院杨媛超297002材料学院于志明298002材料学院张伯岩299002材料学院张佳慧300002材料学院张建飞301002材料学院张健302002材料学院张莉303002材料学院赵小龙304002材料学院赵艺薇305002材料学院赵樱306002材料学院郑若瑶307002材料学院周鼎