二:霍尔传感器 由于霍尔元件产生的电势差很小,故通常将霍尔元件与放大器电路、温度补偿电路及稳压电源电路等集成在一个芯片上,称之为霍尔传感器。 霍尔传感器也称为霍尔集成电路,其外形较小,如下图所示,是其中一种型号的 外形图 三:霍尔传感器的分类 霍尔传感器分为线性型霍尔传感器和开关型霍尔传感器两种: 1.线性型霍尔传感器由霍尔元件、线性放大器和射极跟随器组 成,它输出模拟量。 2.开关型霍尔传感器由稳压器、霍尔元件、差分放大器,斯密特触发器和输出级组成,它输出数字量。
配合差分放大器使用霍尔元件产生的电势差很小,一般在毫伏量级,所以在使用时要进行一定的放大处理(如下图) 配合触发器用在上述电路的基础上,再添加一个施密特触发器用作阈值检测,则可以使霍尔器件输出数字信号,结构图如下: 集成场效应管在上述电路的基础上添加一个场效应管,可以
增强霍尔开关的驱动能力(可以直接驱动LED、继电器等) 四:霍尔传感器的特性 1.线性型霍尔传感器的特性 2.开关型霍尔传感器的特性 如图4所示,其中BOP为工 作点“开”的磁感应强度,BRP 为释放点“关”的磁感应强度当 外加的磁感应强度。超过动作点 Bop时,传感器输出低电平,当磁感应强度降到动作点Bop以下时,传感器输出电平不变,一直要降到释放点BRP时,传感器才由低电平跃变为高电平。Bop 与BRP之间的滞后使开关动作更为可靠。
A3144是开关霍尔传感器 五:开关型霍尔传感器 开关型霍尔传感器主要用于测转数、转速、风速、流速、接近开关、关门告知器、报警器、自动控制电路等。 1.测转速或转数 如图所示,在非磁性材料的圆盘边上粘一块磁钢,霍尔传感器放在靠近圆盘边缘处,圆盘旋转一周,霍尔传感器就输出一个脉冲,从而可测出转数(计数器),若接入频率计,便可测出转速。
成绩评定: 传感器技术 课程设计 题目霍尔传感器小车测速
摘要 对车速测量,利用霍尔传感器工作频带宽、响应速度快、测量精度高的特性结合单片机控制电路,设计出了一种新型的测速系统,实现了对脉冲信号的精确、快速测量,硬件成本低,算法简单,稳定性好。霍尔传感器测量电路设计、显示电路设计。测量速度的霍尔传感器和车轴同轴连接,车轴没转一周,产生一定量的脉冲个数,有霍尔器件电路部分输出幅度为12 V 的脉冲。经光电隔离器后成为输出幅度为5 V 转数计数器的计数脉冲。控制定时器计数时间,即可实现对车速的测量。在显示电路设计中,实现LED上直观地显示车轮的转数值。与软件配合,实现了显示、报警功能 关键词:单片机AT89C51 传感器 LED 仿真
目录 一、设计目的------------------------- 1 二、设计任务与要求--------------------- 1 2.1设计任务------------------------- 1 2.2设计要求------------------------- 1 三、设计步骤及原理分析 ----------------- 1 3.1设计方法------------------------- 1 3.2设计步骤------------------------- 3 3.3设计原理分析--------------------- 10 四、课程设计小结与体会 ---------------- 11 五、参考文献------------------------- 11
一、设计目的 通过《传感器及检测技术》课程设计,使学生掌握传感器及检测系统设计的方法和设计原则及相应的硬件调试的方法。进一步理解传感器及检测系统的设计和应用。 用霍尔元件设计测量车速的电子系统,通过对霍尔元件工作原理的掌握实现对车速测量的应用,设计出具体的电子系统电路,并且能够完成精确的车速测量。 二、设计内容及要求 2.1设计任务 霍尔传感器一般由霍尔元件和磁钢组成,当霍尔元件和磁钢相对运动时,就会产生脉冲信号,根据磁钢和脉冲数量就可以计算转速,进而求出车速。 现要求设计一个测量系统,在小车的适当位置安装霍尔元件及磁钢,使之具有以下功能: 功能:1)LED数码管显示小车的行驶距离(单位:cm)。 2)具有小车前进和后退检测功能,并用指示灯显示。 3)记录小车的行驶时间,并实时计算小车的行驶速度。 4)距离测量误差<2cm。 5)其它。 2.2设计要求 设计要求首先选定传感器,霍尔传感器具有灵敏、可靠、体积小巧、无触点、无磨损、使用寿命长、功耗低等优点,综合了电机转速测量系统的要求。其次设计一个单片机小系统,掌握单片机接口电路的设计技巧,学会利用单片机的定时器和中断系统对脉冲信号进行测量或计数。再次实时测量显示并有报警功能,实时测量根据脉冲计数来实现转速测量的方法。要求霍尔传感器转速为0~5000r/min。 三、设计步骤及原理分析 3.1 设计方法 3.1.1 霍尔效应 所谓霍尔效应,是指磁场作用于载流金属导体、半导体中的载流子时,产生
实验十一 学习使用数字万用表 【思考题参考答案】 1.调节电阻箱的电阻为500Ω和5Ω时,电阻的误差是多大? 答:以0.1级为例,以每个接点的接触电阻按0.002Ω为例。 对于500Ω电阻从0和9999Ω接线柱输出,误差为 Ω=?+?=?512.0002.06%1.0500R 对于5Ω电阻从0和9.9Ω接线柱输出,误差为 Ω=?+?=?009.0002.02%1.05R 2.电源电压为110V 。是否可以只用一个电阻箱控制,得到0.5A 的电流? 答:若只用一个电阻箱控制,所需电阻为Ω2205.0110==R 。这需要电阻箱的100?R 档,此档允许电流为0.05A ,实际电流大于额定电流,不能使用。 3.对于一块四位半的数字万用电表的直流电压200mV 量程,可能出现的最大数字是多少?最小分辨率是多少? 答:最大数字为199.99mV 。最小分辨率为0.01mV 。 4.使用数字万用电表的直流电压2V 量程测量直流电压,测量值为1.5V ,测量误差为多少?如果测量值为0.15V ,测量误差为多少?如果换用200mV 量程测量直流电压0.15V ,误差为多少? 答:我们以0.5级的三位半表为例,()一个字+±=?x U U %5.0。 2V 量程测量直流电压1.5V 时 ()mV mV V U 5.815.1%5.0±=+?±=? 2V 量程测量直流电压0.15V 时()mV mV V U 8.1115.0%5.0±≈+?±=? 200mV 量程测量直流电压0.15V 时()mV mV mV U 9.01.0150%5.0±≈+?±=? 可见,测量小电压尽量选用低量程档。 5.为什么不宜用数字万用电表的电阻档测量表头内阻? 答:数字万用电表电阻档内置9V 电池,而微安表头内阻在2000Ω左右。这样测通过表头的电流估计为mA A 5.40045.020009==,这个电流远大于微安表头的满量程电流。 6.为什么不能用数字万用电表的电阻档测量电源内阻? 答:电阻档的使用条件是被测电阻中无电流通过,或者被测电阻两端无电压。对电源内阻来说,一旦用电阻档测量,电源就为内阻提供了电流,这样容易烧毁电表。 实验十二 制流和分压电路 【思考题参考答案】
CKD 系列电动执行机构系列电动执行机构 产品样本选型资料产品样本选型资料 扬州恒春电子有限公司扬州恒春电子有限公司 20201010年
产品概述 恒春CKD系列智能电动执行机构是引进技术标准型智能一体化的电动执行机构,是对阀门或风门等进行就地和远程电动控制的自动化设备。采用了先进的SOC技术、大屏幕LCD 液晶显示技术、脉冲数字传感技术。这些装置均密封在标准最高为IP68的双密封防水外壳内,可使用手持式红外设定器即可对电动执行机构进行各种参数的设定,各部件均达到防爆等级的要求。电子限位、电子限力矩等技术确保了阀门运行的精确度;磁控开关、红外遥控技术的应用使其不用打开电器箱即可进行操作,确保在高危地区调控时能安全使用;相同步技术使得电动执行机构在安装接线时不用考虑相序,安全方便。 恒春CKD系列智能电动执行机构外观设计美观大方,体积小重量轻、操作简单,且具有高强耐磨、高性能电机、传感器精度高、红外遥控设定操作、换向延时保护、数字限位、智能步进或变速控制、异常保护、开向自由、耐高温、可频繁动作及免浇油免维护等特点。 设计制造技术与结构特点 便利的参数遥控设定功能 1、便利的参数遥控设定功能 投入使用前,只要使用专用红外设定器对执行机构进行参数的遥控设定,现场调试时无需打开电气箱端盖,不仅简化了设定工作程序,还提高了设备安全运行性,特别是那些要求防爆的场所尤为重要; 丰富的在线显示功能 2、丰富的在线显示功能 采用液晶显示技术,利用内置式液晶显示,不仅可准确显示阀门开、关状态和正常阀门开度等,且在参数设定或执行机构有故障时,也能显示出重要信息;同时还提供了三个不同颜色的高亮度发光二极管来指示阀位,使用户即使在夜间也能清晰的了解执行机构的状态;
实验14 直流激励时霍尔传感器位移特性实验 141270046 自动化杨蕾生 一、实验目的: 了解直流激励时霍尔式传感器的特性。 二、基本原理: 根据霍尔效应,霍尔电势U H=K H IB,当霍尔元件处在梯度磁场中运动时,它的电势会发生变化,利用这一性质可以进行位移测量。 三、需用器件与单元: 主机箱、霍尔传感器实验模板、霍尔传感器、测微头、数显单元。 四、实验步骤: 1、霍尔传感器和测微头的安装、使用参阅实验九。按图14示意图接线(实验模板的输出V o1接主机箱电压表Vin),将主机箱上的电压表量程(显示选择)开关打到2V档。 2、检查接线无误后,开启电源,调节测微头使霍尔片大致在磁铁中间位置,再调节Rw1使数显表指示为零。 3、以某个方向调节测微头2mm位移,记录电压表读数作为实验起始点;再反方向调节测微头每增加0.2mm记下一个读数,将读数填入表14。
作出V-X曲线,计算不同线性范围时的灵敏度和非线性误差。 五、实验注意事项: 1、对传感器要轻拿轻放,绝不可掉到地上。 2、不要将霍尔传感器的激励电压错接成±15V,否则将可能烧毁霍尔元件。 六、思考题: 本实验中霍尔元件位移的线性度实际上反映的是什么量的变化? 答:本人认为应该是实际的输入、输出与拟合的理想的直线的偏离程度的变化,当X不同的时候,实际的输出值与根据拟合直线得到的数值的偏离值是不相同的。 七、实验报告要求: 1、整理实验数据,根据所得得实验数据做出传感器的特性曲线。 实验数据如下: 表9-2
(1)由上图可知灵敏度为S=ΔV/ΔX=-0.9354V/mm (2)由上图可得非线性误差: 当x=1mm时, Y=-0.9354×1+1.849=0.9136 Δm =Y-0.89=0.0236V yFS=1.88V δf =Δm /yFS×100%=1.256% 当x=3mm时: Y=-0.9354×3+1.849=-0.9572V Δm =Y-(-0.94)=-0.0172V yFS=1.88V δf =Δm /yFS×100%=0.915% 2、归纳总结霍尔元件的误差主要有哪几种,各自的产生原因是什么,应怎样进 行补偿。 答:(1)零位误差。零位误差由不等位电势所造成,产生不等位电势的主要原因是:两个霍尔电极没有安装在同一等位面上;材料不均匀造成电阻分布不均匀;控制电极接触不良,造成电流分布不均匀。补偿方法是加一不等位电势补偿电路。 (2)温度误差。因为半导体对温度很敏感,因而其霍尔系数、电阻率、霍尔电势的输入、输出电阻等均随温度有明显的变化,导致了霍尔元件产生温度误差。补偿方法是采用恒流源供电和输入回路并联电阻。
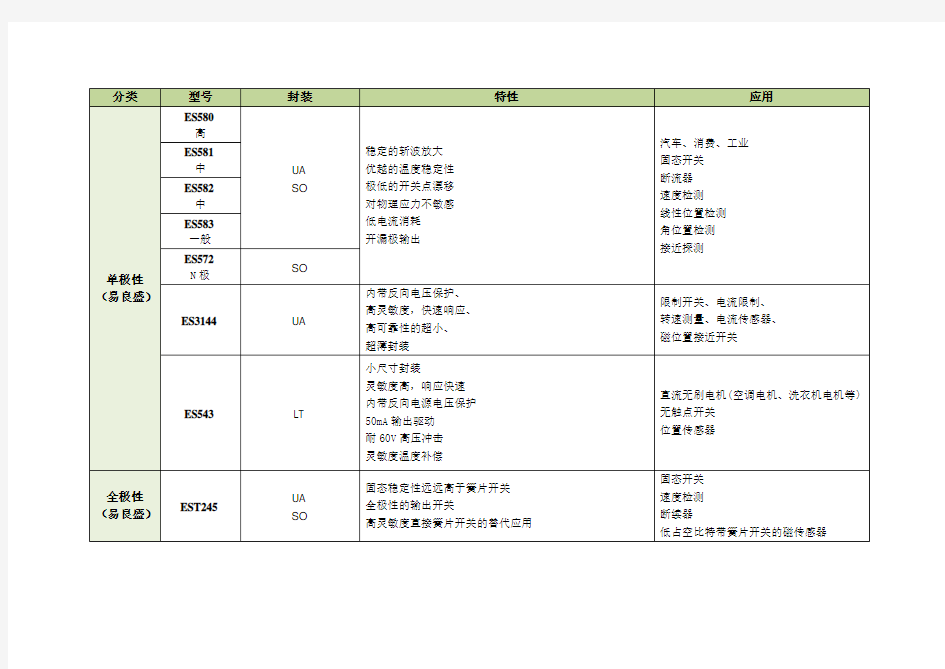
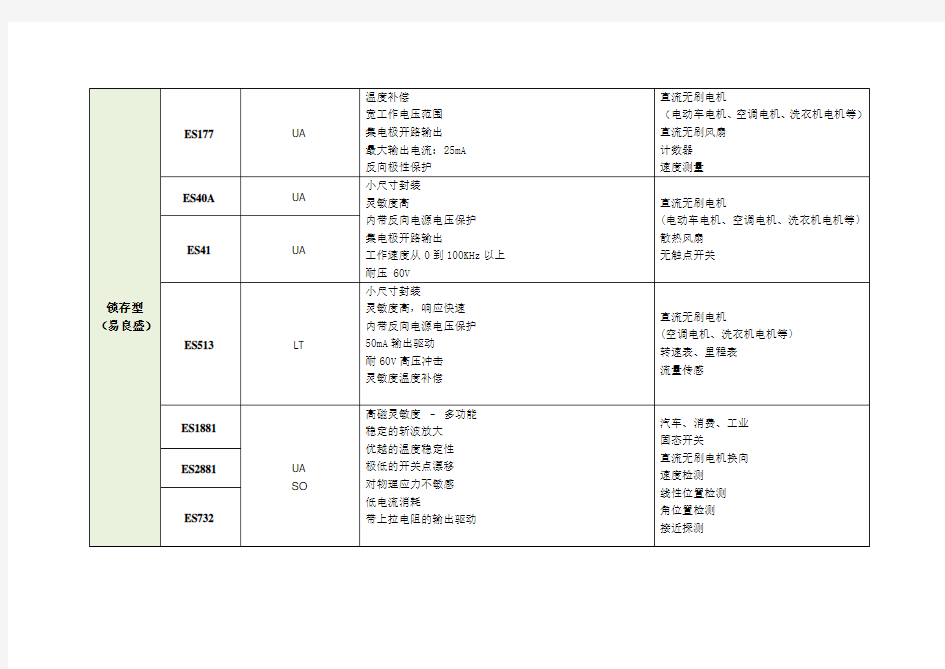
霍尔元件技术指标 1相关参数 1.1封装形式 TO-92(三脚插片),SOT-23(三脚贴片)。还有SIP-4(四脚插片),SOT-143 (四脚贴片)和SOT-89(四脚贴片) 1.2电源 有3.5~24V ,2.5~3.5V ,2.5~5V 1.3灵敏度Kh 数量级在C m /103 3 ,且数值越大灵敏度越高 1.4霍尔电势温度α α越小,设备精确度越大(必要时可以增加温度补偿电路) 1.5额定控制电流 c I 一般在几mA~几十mA ,尺寸越大其值越大(尺寸大的可达几百mA ) 1.6型号 开关型的、线性的、单极性的、双极性的。双极开关霍尔元件:177A 、177B 、 177C 单极霍尔开关元件:AH175、732、1881、S41、SH12AF 、3144、44E 、3021、137、AH137、AH284线性霍尔元件:3503、S496B 、49E 锁定霍尔元件:ATS175、AH173、SS413A 、3172、3075互补双输出开关霍尔元件:276A 、276B 、276C 、277A 、277B 、277C 信号霍尔元件:211A 、211B 、211C 微功耗霍尔元件:TEL4913、TP4913、A3212、A3211。(具体霍尔开关元件见附录) 1.7输入电阻和输出电阻 一般在几Ω到几百Ω,且输入电阻要大于输出电阻 1.8外接上拉电阻 一般大于1K Ω。对一般TTL 电路,由于其高电平电压较低,用于 驱动CMOS 电路时,增加上拉电阻,可以提高其高电平的电压。常用的阻值是4.7k 或10k 。上拉电阻的是接在1脚电源Vcc 和3脚信号输出Vout 之间。 1.9功能分类 按照霍尔器件的功能可将它们分为: 霍尔线性器件 和 霍尔开关器件 。前者 输出模拟量,后者输出数字量。都是输出高电平脉冲信号,不同的是开关型相当于到GS 设定值时电平反转;线性的可能是电压逐渐变化,到一定时使后处理电路输出反电平。一般建议用线性的,开关型常因为温度等原因使得设定值漂移,导致灵敏度下降。 1.10霍尔工作点 霍尔的工作点一般在:单极开关60到200,双极锁定在100内(单位GS )。 1.11霍尔工作频率 一般霍尔的工作频率在100KHZ 以上
基于霍尔式传感器的电子秤-课程设计
————————————————————————————————作者:————————————————————————————————日期:
课程设计报告 设计题目基于霍尔式传感器的电子秤 指导老师 摘要 科学技术的发展对称重技术提出了更高的要求,尤其是微处理技术和传感技术的巨大进步,大大加速了这个进程。目前,电子秤在商业销售中的使用已相当普遍,但在市场上仍广泛使用的电子秤有很大局限性。这些电子秤体积大、成本高,又不便随身携带,而目前市场上流行的便携秤又大都采用杆式秤或以弹簧压缩、拉伸变形来实现计量的弹簧秤等,其计量误差大,又容易损坏。杆式秤和弹簧秤等计量器械将逐渐被淘汰。因此,一种能够在未来更方便、更准确的普及型电子秤的发展受到人们的重视,设计一种重量轻、计量准确、读数直观的民用电子秤迫在眉睫。 本设计过程充分利用传感器的有关知识,利用霍尔传感器设计的简单电子秤很大程度上满足了此应用需求,并从简单电子秤的基本构造进一步了解大型电子秤的构造原理。 关键词:CSY传感器实验仪;电子秤;霍尔式传感器;差动放大器
目录 第一章绪论 (1) 1.1 电子秤概述 (1) 1.1.1 电子秤的发展 (1) 1.2 电子秤的组成 (2) 1.2.1 电子秤的基本结构 (2) 1.2.2 电子秤的基本工作原理 (2) 第二章电子秤设计的目的意义及设计任务与要求 (4) 2.1 电子秤设计目的 (4) 2.2 此课程在教学计划中的地位和作用 (4) 2.3 电子秤设计任务与要求 (4) 2.3.1 设计任务 (4) 2.3.2 设计要求 (4) 第三章电子秤总体设计方案 (5) 3.1 电子秤设计思想 (5) 3.2各电路单元或部件选择 (6) 3.2.1 直流稳压电源的选择 (6) 3.2.2 电桥平衡网络的选择 (6) 3.2.3 称重传感器的选择 (6) 3.2.4 差动放大器的选择 (9) 3.2.5 F/V表的选择 (9) 3.3 最终方案的确定 (10) 第四章硬件设计 (11) 4.1 硬件设计概要 (11) 4.1.1 硬件电路设计原理说明及电路图 (11)
数字霍尔电流表系统设计 摘要:详细介绍新型线性电流传感器ACS712的特点,工作原理,特性曲线及典型应用电路,对ACS712与STC12C2052AD单片机的接口进行了分析和设计。设计了一种基于ACS712的直流检测系统。ACS712使用方便、性价比高、绝缘电压高等特点,主要应用于电动机控制、载荷检测和管理、开关式电源和过电流故障保护等,特别是那些要求电气绝缘却未使用光电绝缘器或其它昂贵绝缘技术的应用中。它能准确,实时地检测电流,使设备隐患得到及时的处理,确保人身安全和设备安全。 关键词:ACS712;特性曲线;STC12C2052AD; 电流检测;RS-232;74HC595
目录 1概述 (3) 2霍尔电流计系统设计方案 (3) 3霍尔电流计系统硬件电路设计 (4) 3.1传感器采集放大电路 (4) 3.1.1ACS712内部结构及工作原理 (4) 3.1.2特性曲线 (5) 3.2 ACS712与AD接口 (6) 3.3 STC12C2052AD单片机AD采集电路 (6) 3.4数码管显示电路 (10) 3.5电源稳压电路 (11) 3.6下载通信电路 (12) 3.7 系统程序 (13) 4总结 (13) 参考文献 (15) 系统总图 (16) 程序 (17)
1概述 在工业、汽车、商业和通信系统中,为了确保设备安全和人身安令,经常需要对设备的某些关键点进行电流检测,传统的检测方法存在测量精度不高,反应时间长 ,对于大电流一般采用电流互感器输出端不能开路 ,突发性绝缘击穿等缺新型线性电流传感器ACS712能有效克服这些缺点,为工业、汽车、商业和通信系统中的交流或直流电流感测提供经实惠的精密解决方案。 2霍尔电流计系统设计方案 本系统采用以STC 系列的STC12C2052AD 单片机系统为核心开发霍尔电流计系统。系统硬件原理框图如图1-1: 图:1-1 系统硬件原理图1-1由ACS712传感器,STC12C2052AD 单片机自带AD 模数转换,74HC595 数码管显示和RS232串口通信等构成。整个系统由微处理器控制,根据霍尔原理设计的。霍尔元件之作用原理也就是霍尔效应,所谓霍耳效应指将电流I 通至一物质,并对与电流成正角之方向施加磁场B 时,在电流与磁场两者之直角方向所产生的电位差V 之现象。ACS712在一定的电流范围内输出电压和电流成线性关系,内部自带放大,滤波电路,通过单片机自带8位AD 采集数据,再由软件滤波补偿,用数码管实时显示当前电流值它的各部分电路的说明如下。 (1) ACS712采集电流,放大输出电压信号,经滤波电路后电流和电压建立线性关系 (2)STC12C2052AD 单片机通过内部8位AD 实时检测电压,通过线性关系和补偿建立电流和电压的关系 (3) 通过显示电路将测距结果实时地显示出来。
霍尔传感器的分类、霍尔效应与霍尔传感器的应用 霍尔传感器是一种磁传感器。用它可以检测磁场及其变化,可在各种与磁场有关的场合中使用。霍尔传感器以霍尔效应为其工作基础,是由霍尔元件和它的附属电路组成的集成传感器。霍尔传感器是根据霍尔效应制作的一种磁场传感器。霍尔效应是磁电效应的一种,这一现象是霍尔(A.H.Hall,18551938)于1879年在研究金属的导电机构时发现的。后来发现半导体、导电流体等也有这种效应,而半导体的霍尔效应比金属强得多,利用这现象制成的各种霍尔元件,广泛地应用于工业自动化技术、检测技术及信息处理等方面。 霍尔效应如图1所示,在半导体薄片两端通以控制电流I,并在薄片的垂直方向施加磁感应强度为B的匀强磁场,则在垂直于电流和磁场的方向上,将产生电势差为UH的霍尔电压, 它们之间的关系为。 式中d 为薄片的厚度,k称为霍尔系数,它的大小与薄片的材料有关。上述效应称为霍尔效应,它是德国物理学家霍尔于1879年研究载流导体在磁场中受力的性质时发现的。 霍尔传感器由于霍尔元件产生的电势差很小,故通常将霍尔元件与放大器电路、温度补偿电路及稳压电源电路等集成在一个芯片上,称之为霍尔传感器。 霍尔传感器也称为霍尔集成电路,其外形较小,如图2所示,是其中一种型号的外形图。霍尔传感器的分类霍尔传感器分为线型霍尔传感器和开关型霍尔传感器两种。 (一)开关型霍尔传感器由稳压器、霍尔元件、差分放大器,斯密特触发器和输出级组成,它输出数字量。开关型霍尔传感器还有一种特殊的形式,称为锁键型霍尔传感器。 (二)线性型霍尔传感器由霍尔元件、线性放大器和射极跟随器组成,它输出模拟量。 线性霍尔传感器又可分为开环式和闭环式。闭环式霍尔传感器又称零磁通霍尔传感器。线
. 传感器原理及应用期末课程设计题目基于霍尔传感器的转速测量电路设计 姓名小波学号8888888888 院(系)电子电气工程学院 班级清华大学——电子信息 指导教师牛人职称博士后 二O一一年七月十二日
摘要:转速是发动机重要的工作参数之一,也是其它参数计算的重要依据。针对工业上常见的发动机设计了以单片机STC89C51为控制核心的转速测量系统。系统利用霍尔传感器作为转速检测元件,并利用设计的调理电路对霍尔转速传感器输出的信号进行滤波和整形,将得到的标准方波信号送给单片机进行处理。实际测试表明,该系统能满足发动机转速测量要求。 关键词:转速测量,霍尔传感器,信号处理,数据处理
Abstract: The rotate speed is one of the important parameters for the engine, and it is also the important factor that calculates other parameters. The rotate speed measurement system for the common engine is designed with the single chip STC89C51. The signal of the rotate speed is sampled by the Hall sensor, and it is transformed into square wave which will be sent to single chip computer. The result of the experiment shows that the measurement system is able to satisfy the requirement of the engine rotate speed measurement. Key words:rotate speed measurement, Hall sensor, signal processing, data processing
《大学物理实验》复习思考题 第一章误差、不确定度和数据处理的基本知识 1、测量不确定度的概念是什么?如何对测量不确定度进行评定?怎样对测量结果进 行报 道? u A (x) = S~ 〃c (x )=』心乃 +/心)令={(S ;)2 + (-^-)2 (p=68.3%) 2、测量结果有效数字位数是如何确定的? (1) 不确定度的位数一般只取一位(而且只入不舍),若首位是1时可取两位。相对不 确定度为百分Z 几,一般也只収一、两位。 (2) 不确定度决定了测量结果有效数字的位数,即测量结果的有效数字最后一位应与 不确定度所在位对齐;若不确定度取两位,则测量结果有效数字的末位和不确定度末位取齐。 (3) 有效数字尾数舍入规则:尾数“小于五则舍,大于五则入,等于五凑偶",这种舍 入法则使尾数舍与入的概率相同。 (4) 同一个测量值,其精度不应随单位变换而改变。 3、作图法是如何处理数据的? (1) 作图规则 ①作图一定要用坐标纸;②価坐标纸大小和确定坐标轴分度;③画出坐标轴; ④数据点:⑤连线;⑥标注图名. (2) 图解法求直线的斜率和截距 求直线斜率和截距的具体做法是,在描出的直线两端各取一坐标点A (X ), Y1)和B (x 2, y 2), 则可从下而的式了求出肓线的斜率a 和截距bo A 、 B 两坐标点相隔要远一些,一般取在直线两端附近(不要取原來的测量数据点),且 自变量最好取为整数。 4、逐差法是如何处理数据的?夕2 一夕1 x 2 _ X 1 b = x 2y { ~x {y 2 x 2 — X1
实验1基本测量 1.掌握游标卡尺、螺旋测微计、读数显微镜的测量原理及测量长度的方法,能正确读数。 2.50分游标卡尺的分度值是多少?如何从游标卡尺上读出被测的毫米整数和小数?如何记录游标卡尺的零点读数?如何修正测量值? 3.螺旋测微计的分度值是多少?如何记录螺旋测微计的零点读数?如何对测虽读数进行修正? 4.使川螺旋测微计时,当螺杆接近物体时,为什么不能直接转动套筒?应正确转动什么部件?其作用是什么? 5.使用读数显微镜为什么要避免冋程误差?利用读数显微镜测量细金属丝的直径时,如何防止回程误差? 6.有两种游标卡尺,其主尺上单位分度的长度副尺的分格数n =20,其中一种副尺上单位分度的长度“=0.95inin,另一种为x2=1.95mm,这两种游标的分度值是否相同?问这两种游标有什么差别? 7.如图1所示的游标卡尺,其副尺的零线在主尺零线的左边,副尺上第6条刻度和主尺上的某刻度对齐,问零点读数是多少? 8.如图所示的螺旋测微计的螺杆和砧台的端血刚好接触时,活动套筒左边的刻度相対 1 1 1 1 1 lcm 十 2 L LILI J 1 1111"'Io涮尺 图1游标卡尺读数示意图 于微测基准线的位置如图2(a)、(b),问零点读数各是多少? 图2螺旋测微讣读数示意图 实验2示波器的原理与应用 1.从CH1通道输入IV、lKHz正弦波,如何操作显示该信号波形? 2.当波形水平游动吋,如何调节使波形稳定? 3.如何测量波形的幅度与周期? 4.调节什么旋纽使李萨如图稳定? 5.当示波器出现下面不良波形时,请选择合适的操作方法,使波形正常。(1)波形超 出屏幕:______ ;(2)波形太小: ________ ; (3)波形太密:________ : (4)亮点,不显示波形:_______ 3 可选答案:①调大“偏转因数(V0LTS/DIV)”;②调小“偏转因数”;③调大“扫描速率(TTME/DTV)";④调小“扫描速率”;⑤水平显示置“A”(常规)方式;⑥水平显示置“X-Y” (a) (b)
霍尔传感器的直流激励特性实验 一、实验目的:了解霍尔传感器的直流激励特性。 二、实验内容: 给霍尔传感器通以直流电源,经差动放大器放大,当测微头随振动台上、下移动时,就有霍尔电势输出,从而可以测出霍尔传感器在直流激励下的输出特性。 三、实验原理: 由两个半圆形永久磁钢组成梯度磁场,位于梯度磁场中的霍尔元件(霍尔片)通过底座连接在振动台上。当霍尔片通以恒定电流时,将输出霍尔电势。改变振动台的位置,霍尔片就在梯度磁场中上下移动,霍尔电势V值大小与其在磁场中的位移量X有关。 四、实验要求 1、按图1接线,插接线插接要牢靠。 2、直流激励电压为±2V,不能任意加大,否则将损坏霍尔片。 五、实验装置: 1.传感器系统实验仪CSY型1台 2.通用示波器COS5020B 1台 3.系统微机1台 4.消耗材料: 霍尔片(专用) 1个 插接线(专用) 10根 图1 霍尔传感器实验接线图 六、实验步骤: 1.按图1接线,使霍尔片位于梯度磁场中间位置,差放调零。 2.上、下移动振动台并调节差放增益与电桥WD电位器,使得电压表双向指示基本对称且趋近最大。 3.将测微头与振动台吸合,并调节霍尔片使之处于梯度磁场的中间位置。 4.用测微头驱动霍尔片输入位移量X, 每次变化0.5mm,量程为:-3mm +3mm,读取相应的输出电压值,填入表中。 七、实验数据及处理: 1.整理实验数据,作出V-X曲线,求出灵敏度及线性区 2.给出位移测量系统的适宜量程
1.计算灵敏度:S=0.587V/mm 则拟合直线方程为:V=0.857X+0.334 由图像得,当X在(-1.00,3.00)之间时,图像具有线性。当X〉3.00时,图像失去线性。 其线性区间为(-1.00,3.00)单位:mm 2.系统的适宜量程: 霍尔传感器在线性区内测量有效,适宜量成为:(-1.00,3.00)单位:mm
参考文献 方佩敏新编传感器原理,〔M].北京:电子工业出版社,1992;8~82. 顾仁明实用电工及电气设备[M].济南:山东科学技术出版社,1985:7~60. 吴道悌非电量电测技术[M].西安:西安交通大学出版社,2000:96~105. 殷勤业自动检测和仪表中的共性技术[M].北京:清华大学出版社,2000:166~185. 张毅自动检测技术及仪表[M]化学工业出版社,2004: 8~36. 孙育才 MCS一51系列单片微型计算机及其应用〔M〕.南京:东南大学出版社,2000. 单永祥传感器的原理与设计基础及其应用[M]北京:国防业出版社,赵负国现代传感器集成电路[M]北京:人民邮电出版社 赵继文传感器与应用电路设计[M ]北京:科学出版社, 强锡富《传感器》普通高等教育机电类规划教材[M ]北京械工业出版社 一设计目的 通过课程设计,使我们在实践环节中进一步理解和熟悉自动检测仪表的原理、组成和调试。熟悉霍尔传感器的原理,掌握常用的霍尔传感器的使用方法。掌握常用芯片的使用方法,熟悉A/D转换与单片机的
接口方法。并培养动手能力,学会检索相关科技文献的方法,查找器件手册与相关参数,整理总结设计报告。 二设计要求 1)采用霍尔传感器; 2)测量范围为0~50A; 3) 电路由霍尔传感器转换、A/D显示电路组成; 4)要求说明工作原理,附系统图一张。 三控制系统设计框图 由UGN-3501M、A/D转换器单片机及液晶显示器组成的数显霍尔电流表的控制框图如图1所示 四系统硬件设计 1 霍尔传感器 1.1 检测原理 N 霍尔传感器广泛用于测量电流,从而可以制成电流过载检测器或过载保护装置;在电机控制驱动中,作为电流反馈元件构成电流反馈回路,构成电流表。 本设计用UGN-3501M霍尔传感器测量电流。UGN-3501 M是集成的线性型霍尔 1 传感器,为8引脚PID封装的集成电路,采用差动霍尔电压输出,其输出极性与磁场方向有关,检测灵敏度为1. 4V/0. 1T应用时在其5,6,7引脚连接调整电位器,可补偿不等位电势,同时可改善线性。
霍尔效应和霍尔元件特性测定数据处理范例 1.霍尔元件的不等位电势差测定 0M I =(2)在坐标纸上作出不等位电势差与工作电流的关系曲线。 V /m V I s /mA 图1:不等位电势差与工作电流的关系曲线 2.励磁电流一定,霍尔元件灵敏度测定(仪器公差取数字仪表显示数据末位的5倍,如霍尔工作电流示值误差: 0.05S I m mA ?=;霍尔电压示值误差: 0.05H V m mV ?=; 励磁电流示值误差:0.005M I m A ?=) ⑴ 霍尔电压与霍尔电流关系测试数据表: H S V I -500M I mA =0.25 0.28 -0.23 0.22 -0.29 0.26 0.50 0.56 -0.44 0.44 -0.56 0.50 0.75 0.85 -0.67 0.67 -0.85 0.76 1.00 1.12 -0.88 0.88 -1.12 1.00 1.25 1.41 -1.10 1.11 -1.41 1.26 1.50 1.69 -1.32 1.32 -1.68 1.50 1.75 1.97 -1.54 1.54 -1.96 1.75
2.00 2.25 -1.76 1.77 -2.24 2.01 2.25 2.54 -1.97 1.99 -2.52 2.26 2.50 2.82 -2.19 2.21 -2.80 2.51 2.75 3.10 -2.41 2.44 -3.08 2.76 3.00 3.39 -2.63 2.66 -3.36 3.01 ⑵ 利用逐差法计算霍尔元件灵敏度及其不确定度(0.683p =)。 H H H S S V V K I B I B ?= = ?? a )利用逐差法计算H V ?的平均值及不确定度估算(该部分逐差法计算可用数据处理软 件的逐差法进行计算) 7182931041151261.750.26 1.49, 2.010.50 1.51,2.260.76 1.50, 2.51 1.00 1.51, 2.76 1.26 1.50, 3.01 1.50 1.51H H H H H H H H H H H H V V mV V V mV V V mV V V mV V V mV V V mV -=-=-=-=-=-=-=-=-=-=-=-= 1.50H V mV ?= 某次测量的标准偏差:0.0082H V S mV ?=,平均值的标准偏差: 0.0033H V S mV ?= 肖维涅系数 6 1.73n c c ==, 1.730.00820.014186H n V c S mV ?*=*= 根据肖维涅准则(坏值条件: *i H H H n V V c S ?-?>)检验无坏值出现。(注:如坏值 超过两个, 请说明后用作图法处理) H V ?不确定度估算: 1.110.00330.0037H A vp V u t S mV ?==?=, (0.683p =) 0.041B p u mV ==== (0.683p =) 0.041H V u mV ?=== 0.041 0.0271.50 H H V V H u E V ??= = =? b )S I ?的不确定度估算(该部分计算也可用数据处理软件的逐差法进行计算) 1.50S I mA ?= 0.029S p u k mA I ?=== (0.683p =) 0.0290.0191.50 S S I I S u E I ===? (0.683p =) c )磁感应强度B 及其不确定度的计算 螺线管参数:线圈匝数N=1800匝,有效长度2L =181mm ,等效半径R =21mm 1800 2181 N n L = = 匝/mm
吉林建筑工程学院 电气与电子信息工程学院 传感器及检测技术课程设计报告 设计题目: 霍尔元件小车测速系统设计 专业班级: 电子信息科学与技术081班 学生姓名: 赵越 学 号: 10308105 指导教师: 王 超 吴鹤君 设计时间: 2011.12.12-2011.12.23 目 录 教师评语: 成绩 评阅教师 日期
1 绪论 (1) 1.1设计任务 (1) 1.2方案分析论证 (1) 2 基于霍尔传感器的电机转速测量系统硬件设计 (2) 2.1电机转速测量系统的硬件电路设计 (2) 2.2霍尔传感器测量电路设计 (4) 2.3单片机AT89C51 (8) 2.4显示电路设计 (11) 2.5系统软件设计 (14) 3 系统仿真和调试 (16) 3.1Proteus软件 (16) 3.2硬件调试 (17) 3.3软件调试 (19) 3.4软硬件联调 (19) 4 结论 (21) 参考文献 (22) 附录硬件实物图 (23)
1 绪论 1.1 设计任务 1.1.1课程设计目的: 通过《传感器及检测技术》课程设计,掌握传感器及检测系统设计的方法和设计原则及相应的硬件调试的方法。进一步理解传感器及检测系统的设计和应用。 1.1.2课程设计题目: 霍尔元件小车测速系统设计 1.1.3 课程设计内容: 1、霍尔元件测速系统设计 霍尔传感器一般由霍尔元件和磁钢组成,当霍尔元件和磁钢相对运动时,就会产生脉冲信号,根据磁钢和脉冲数量就可以计算转速,进而求出车速。 现要求设计一个测量系统,在小车的适当位置安装霍尔元件及磁钢,使之具有以下功能: 1)LED数码管显示小车的行驶距离(单位:cm)。 2)具有小车前进和后退检测功能,并用指示灯显示。 3)记录小车的行驶时间,并实时计算小车的行驶速度。 4)距离测量误差<2cm。 5)其它。 1.2 方案分析论证 1.2.1 霍尔测速模块论证与选择 方案一:采用型号为A3144的霍尔片作为霍尔测速模块的核心,该霍尔片体积小,安装灵活,价格合理,可用于测速,可与普通的磁钢片配合工作。 方案二:采用型号为CHV-20L的霍尔元器件作为霍尔测速模块的核心,该霍尔器件额定电流为100mA,输出电压为5V,电源为12~15V。体积较大,价格昂贵。 因此选择方案一。 1.2.2 单片机模块论证与选择 方案一:采用型号为AT89C51的单片机作为主控制器,使用霍尔传感器进行测量的直流电机转速测量系统。AT89C51是带4K字节闪烁可编程擦除只读存储器的低电压、高性能CMOS8位微处理器。它将多功能8位CPU和闪烁存储器组合在单个芯片中,为许多控制提供了灵活性高且价格低廉的方案[3]。
电子测量原理课程设计报告 题目名称:通过霍尔效应测量磁场姓名:陈屹 班级:电信051 学号: 200532285126 指导老师:刘向东 完成日期: 2008-7-16
设计题目:通过霍尔效应测量磁场 设计目的:通过用霍尔元件测量磁场,判断霍尔元件载流子类型,计算载流子的浓度和迁移速度,以及了解霍尔效应测试中的各种副效应及消除方法。 设计仪器:QS-H霍尔效应组合仪,小磁针,测试仪。 设计原理: 一、通过霍尔效应测量磁场 霍尔效应装置如图2.3.1-1和图2.3.1-2所示。将一个半导体薄片放在垂直于它的磁场中(B的方向沿z轴方向),当沿y方向的电极A、A’上施加电流I 时,薄片内定向移动的载流子(设平均速率为u)受到洛伦兹力FB的作用, F B = q u B (1) 无论载流子是负电荷还是正电荷,FB的方向均沿着x方向,在磁力的作用下,载流子发生偏移,产生电荷积累,从而在薄片B、B’两侧产生一个电位差VBB’,形成一个电场E。电场使载流子又受到一个与FB方向相反的电场力FE, F E =q E = q V BB’ / b (2) 其中b为薄片宽度,FE随着电荷累积而增大,当达到稳定状态时FE=FB,即 q uB = q V BB’ / b (3) 这时在B、B’两侧建立的电场称为霍尔电场,相应的电压称为霍尔电压,电极B、B’称为霍尔电极。 另一方面,射载流子浓度为n,薄片厚度为d,则电流强度I与u的关系为: bdnqu I (4) 由(3)和(4)可得到
d IB nq V B B 1= ' (5) 令nq R 1 = ,则 d IB R V B B =' (6) R 称为霍尔系数,它体现了材料的霍尔效应大小。根据霍尔效应制作的元件称为霍尔元件。 在应用中,(6)常以如下形式出现: IB K V H B B =' (7) 式中nqd d R K H 1== 称为霍尔元件灵敏度,I 称为控制电流。 由式(7)可见,若I 、K H 已知,只要测出霍尔电压V BB’,即可算出磁场B 的大小;并且若知载流子类型(n 型半导体多数载流子为电子,P 型半导体多数载流子为空穴),则由V BB’的正负可测出磁场方向,反之,若已知磁场方向,则可判断载流子类型。 由于霍尔效应建立所需时间很短(10-12~10-14s),因此霍尔元件使用交流电或者直流电都可。指示交流电时,得到的霍尔电压也是交变的,(7)中的I 和V BB’应理解为有效值。 二、 霍尔效应设计中的副效应 在实际应用中,伴随霍尔效应经常存在其他效应。例如实际中载流子迁移速率u 服从统计分布规律,速度小的载流子受到的洛伦兹力小于霍尔电场作用力,向霍尔电场作用力方向偏转,速度大的载流子受到磁场作用力大于霍尔电场作用力,向洛伦兹力方向偏转。这样使得一侧告诉载流子较多,相当于温度较高,而另一侧低速载流子较多,相当于温度较低。这种横向温差就是温差电动势V E ,这种现象称为爱延豪森效应。这种效应建立需要一定时间,如果采用直流电测量时会因此而给霍尔电压测量带来误差,如果采用交流电,则由于交流变化快使得爱延豪森效应来不及建立,可以减小测量误差。 此外,在使用霍尔元件时还存在不等位电动势引起的误差,这是因为霍尔电极B 、B’不可能绝对对称焊在霍尔片两侧产生的。由于目前生产工艺水平较高,不等位电动势很小,故一般可以忽略,也可以用一个电位器加以平衡(图2.3.1-1中电位器R 1)。 我们可以通过改变I S 和磁场B 的方向消除大多数付效应。具体说在规定电流和磁场正反方向后,分别测量下列四组不同方向的I S 和B 组合的V BB’,即
霍尔电流传感器在蓄电池在线监测中的应用 王长幸 (江苏安科瑞电器制造有限公司,江苏江阴214405) 摘要:本文分析了霍尔电流传感器的工作原理以及行业内的产品特点及选型,浅谈其在蓄电池在线监测系统中的应用 关键词:霍尔电流传感器工作原理充放电电流蓄电池 1引言 蓄电池作为直流系统的电源是系统中十分关键的设备,必须对其进行规范合理、真实有效的日常维护。蓄电池在线监测装置主要应用于发电厂、供电局等电力直流系统通信机房和基站、铁路供电变电站金融、化工、企事业单位的UPS机房等后备电源使用场合。用于监测大容量蓄电池组的剩余电量、基本参数等,为蓄电池组的日常维护提供重要的依据、保证蓄电池组的可靠运行。 蓄电池在充放电时,对充放电电流大小有严格要求,本文详细介绍了霍尔电流传感器对蓄电池充放电电流监测的实现。 2工作原理 霍尔电流传感器是根据霍尔效应制作的一种磁场传感器,具有对磁场敏感、结构简单、体积小、响应速度快能特点,按原理可分为开环(直放式)和闭环(磁平衡式),基于实际应用中开环(直放式)原理传感器结构相对紧凑、功耗小且成本较低,普遍采用开环(直放式)原理霍尔电流传感器应用于蓄电池在线监测系统。 霍尔电流传感器开环(直放式)原理:当原边电流IP流过一根长导线时,在导线周围将产生磁场,磁场的大小与流过导线的电流成正比,产生的磁场聚集在磁环内,通过磁环气隙中霍尔元件进行测量并放大输出,其输出电压Vs精确的反映原边电流IP。一般的额定输出标定为5V。
3选型 3.1产品介绍 霍尔电流传感器结合了电流互感器和分流器的所有优点,克服了互感器和分流器的不足(如:互感器只适用于50Hz工频测量;分流器无法进行隔离检测),同时还具有响应时间快(≤10us)、绝缘性强(耐压3.5kV)、频带宽(≤20kHz)、体积小易于安装等特点。 在传感器行业内,江苏安科瑞严格按照JB/T7490-2007《霍尔电流传感器》规定的各项要求,相对于同行采用插针式接线不同,一律采用绿色可插拔端子现场接线方便、可靠。同时针对不同现场应用设计出闭口式外形霍尔、开口式外形霍尔。一般情况下,可以根据输入信号、外形、内控尺寸来选择霍尔电流传感器。 闭口式外形 输入信号输出信号内孔(mm)精度辅助电源霍尔电流传感器 AHKC-E50~500A5V圆孔闭口φ211级±15V AHKC-LT200~2000A5V圆孔闭口φ321级±15V AHKC-BS50~500A5V方孔闭口20.5*10.51级±15V AHKC-F200~1500A5V方孔闭口41*121级±15V 开口式外形 输入信号输出信号内孔(mm)精度辅助电源霍尔电流传感器 AHKC-EKA50~500A5V圆孔开口φ211级±15V AHKC-EKB200~2000A5V圆孔开口φ401级±15V AHKC-K400~2000A5V方孔开口64*161级±15V AHKC-KA600~5000A5V方孔开口104*361级±15V