三菱工业机器人培训——机器人编程
一、MELFA-BASIC V说明
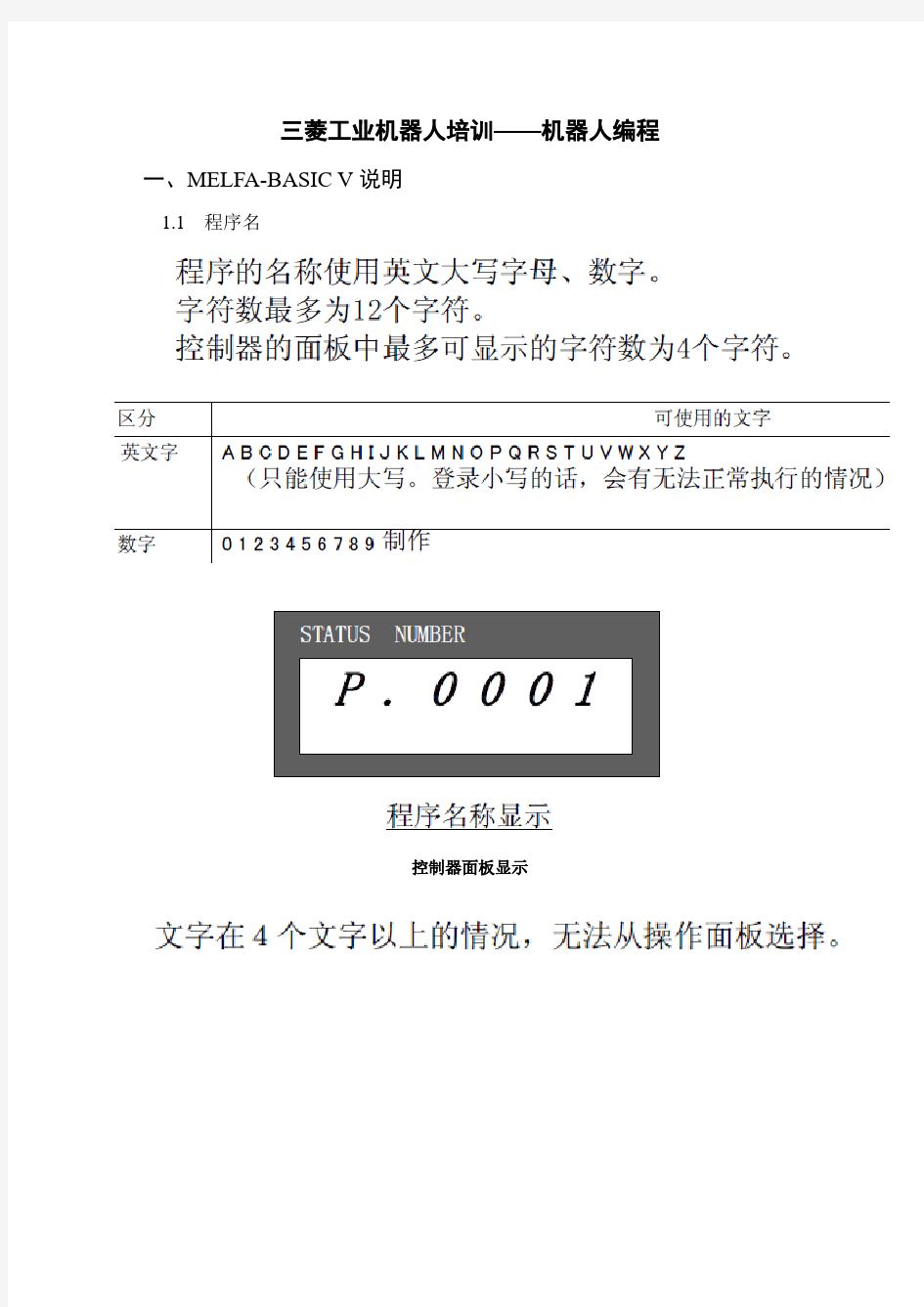
1.1 程序名
控制器面板显示
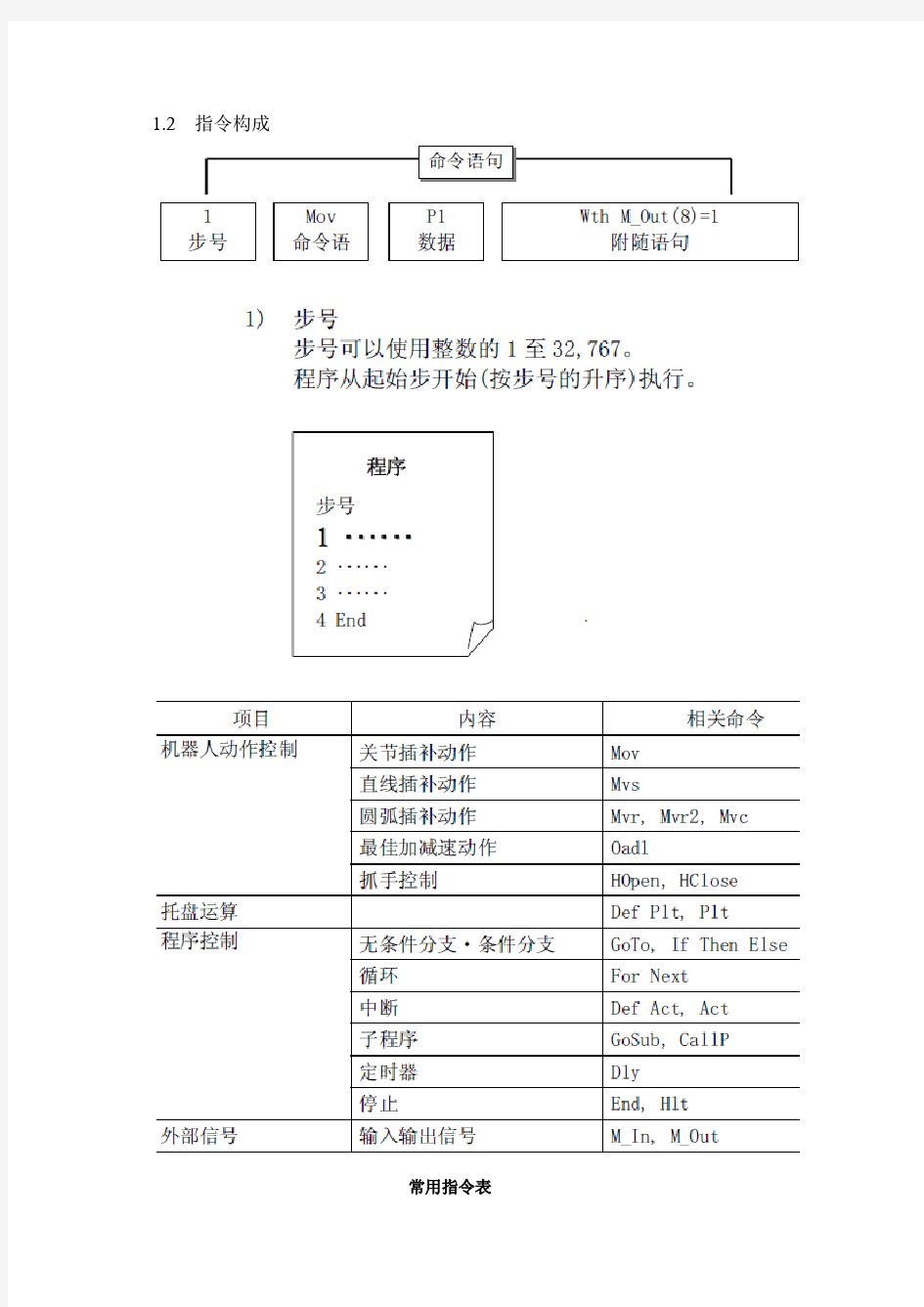
1.2 指令构成
常用指令表
1.3 数据类型
1)常量
数值常量
字符常量
位置常量
角度常量变量
数值变量
数值类型
数值范围
位置变量
关节变量
输入输出变量2.1)外部变量
二、指令说明
2.1 主要指令一览
动作控制指令
程序控制指令
运算指令
外部输出入信号
2.2 常用指令说明
(1)插补命令
MOV 指令(例mov p1)
MVS指令(mov p1)
Mvr 起点,通过点,终点(例:Mvr P1,P2,P3)
接近语法(RV型)
速度命令
OVRD命令
实际速度:系统设置速度×Ovrd命令设置速度
抓手开闭
延时、等待
延时指令说明:抓手1关闭后,延时0.5S,执行下一指令。
等待指令
说明:等待M_In(10)信号为1 ,执行下一语句。子程序
Gosub指令
执行顺序:主程序14步》副程序50步》副程序57步》主程序15步
分支命令
Goto无条件跳转指令
说明:goto 无条件跳转至星号*开头的标签处。如果从if语句跳出,可能会导致无法endif而报错。
If 语句
说明:IF条件成立,执行then部分,不成立,执行else部分。
end命令
End指令
说明:定义主程序,与后面子程序内容界限区分。
三、共享内存(SQ)
3.1 地址分配
说明:注意输出地址U3E0打头;输入地址U3En (n为1、2、3)打头,Plc地址为16位,机器人地址为1位,即机器人输入地址10000对应PLC输出地址为U3E0\G10000.0,机器人输入地址10015对应PLC输出地址为U3E0\G10000.A。
3.2 内存使用
1)机器人中编程
1号机器人与PLC内存作对应分配(随机分配)
共享内存机器人间通讯使用:
2号机器人程序1号机器人程序
通讯变量的初始化
2)PLC中编程
PLC中输出输入赋值通讯
整形变量的赋值通讯