电动摩托车用小型电机的种类、特性报告
电动机是电动摩托车的一个重要部件,目前在电动摩托车驱动领域,主要有直流电动机驱动系统、交流永磁电动机驱动系统和开关磁阻电动机驱动系统应用范围比交广泛。
1 直流电动机驱动系统 1.1 直流电机的工作原理
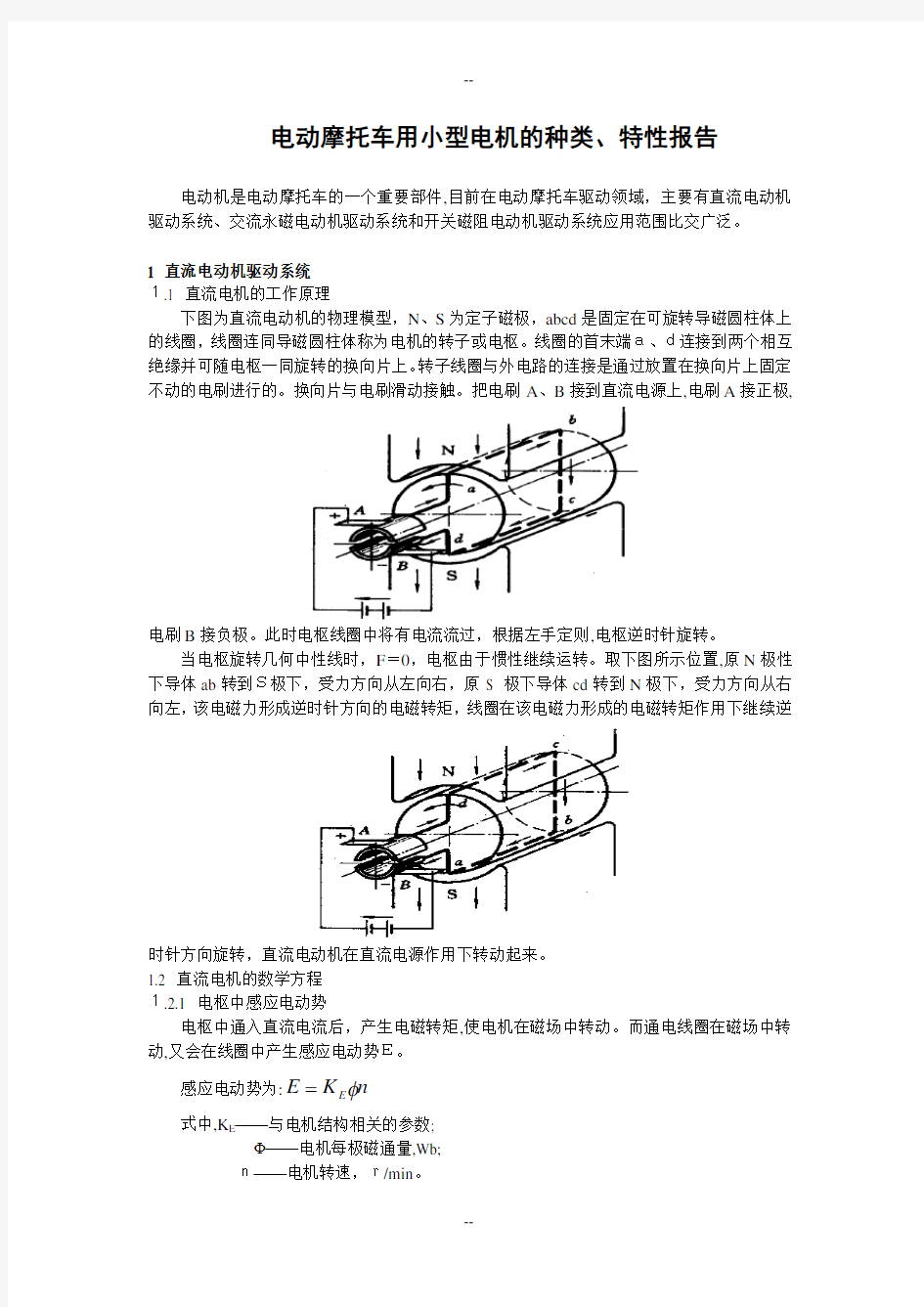
下图为直流电动机的物理模型,N 、S 为定子磁极,abcd 是固定在可旋转导磁圆柱体上的线圈,线圈连同导磁圆柱体称为电机的转子或电枢。线圈的首末端a、d连接到两个相互绝缘并可随电枢一同旋转的换向片上。转子线圈与外电路的连接是通过放置在换向片上固定不动的电刷进行的。换向片与电刷滑动接触。把电刷A 、B 接到直流电源上,电刷A 接正极,
电刷B 接负极。此时电枢线圈中将有电流流过,根据左手定则,电枢逆时针旋转。
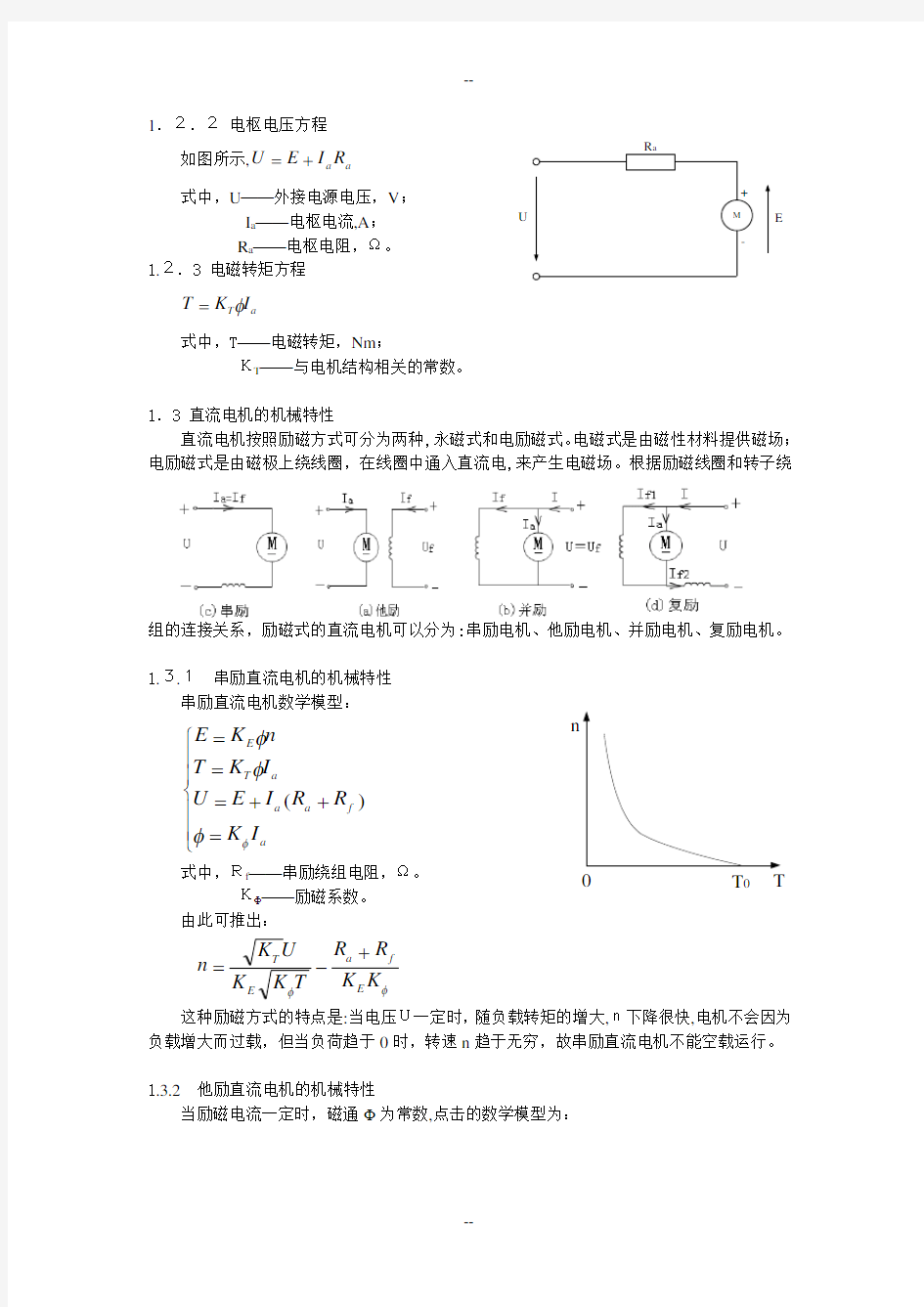
当电枢旋转几何中性线时,F =0,电枢由于惯性继续运转。取下图所示位置,原N 极性下导体ab 转到S极下,受力方向从左向右,原S 极下导体cd 转到N 极下,受力方向从右向左,该电磁力形成逆时针方向的电磁转矩,线圈在该电磁力形成的电磁转矩作用下继续逆
时针方向旋转,直流电动机在直流电源作用下转动起来。 1.2 直流电机的数学方程 1.2.1 电枢中感应电动势
电枢中通入直流电流后,产生电磁转矩,使电机在磁场中转动。而通电线圈在磁场中转动,又会在线圈中产生感应电动势E。
感应电动势为:n K E
E φ=
式中,K E ——与电机结构相关的参数; Φ——电机每极磁通量,Wb; n——电机转速,r/min 。
1.2.2 电枢电压方程
如图所示,a a R I E U += 式中,U ——外接电源电压,V ; I a ——电枢电流,A ; R a ——电枢电阻,Ω。 1.2.3 电磁转矩方程
a T I K T φ=
式中,T ——电磁转矩,Nm ;
KT ——与电机结构相关的常数。
1.3 直流电机的机械特性
直流电机按照励磁方式可分为两种,永磁式和电励磁式。电磁式是由磁性材料提供磁场;电励磁式是由磁极上绕线圈,在线圈中通入直流电,来产生电磁场。根据励磁线圈和转子绕
组的连接关系,励磁式的直流电机可以分为:串励电机、他励电机、并励电机、复励电机。
1.3.1 串励直流电机的机械特性
串励直流电机数学模型:
??
?
?
???=++===a f a a a T E I K R R I E U I
K T n K E φφφφ)(
式中,Rf ——串励绕组电阻,Ω。 KΦ——励磁系数。 由此可推出:
φ
φ
K K
R R
T
K K U K n E f a E T +-
=
这种励磁方式的特点是:当电压U一定时,随负载转矩的增大,n下降很快,电机不会因为负载增大而过载,但当负荷趋于0时,转速n 趋于无穷,故串励直流电机不能空载运行。
1.3.2 他励直流电机的机械特性
当励磁电流一定时,磁通Φ为常数,点击的数学模型为:
M
U
+
-
E 0
??
?
??+===a a a T E R
I E U I K T n K E φφ
由此可推出:T K K R K U
n T E a E 2
φ
φ-=
这种励磁方式的特点是:在电枢电压一定时,由于他励电机的电枢电阻R a 很小,所以在负载转矩变化时,转速n 的变化不大,电机特性也较硬。永磁直流电机和并励电机也有类似的机械特性。
1.3.3 复励直流电机的机械特性
他励直流电机的机械特性很硬,串励直流电机的机械特性很软,复励直流电机可以结合两者的特性。如果串励绕组的磁势与并励绕组的磁势方向相同,叫积复励直流电机;方向相反,叫差复励直流电机。
积复励直流电机的机械特性可以借鉴他励式的机械特性方程,曲线的形状取决于串励磁势的强弱。
T K K R K U n T E a
E 2
φ
φ-=
则电机的总励磁磁通为:C B φφφ+=,其中并励磁通为B φ,串励磁通为B φ。
直流电机驱动系统具有成本低、易于平滑调速、过载能力强、系统可靠性好,但是由于需要换向器(整流子)和电刷,存在着机械磨损,影响了电机的效率。
2 交流永磁电动机驱动系统
交流永磁电机主要包含两大类:永磁同步电机(Perm anent Magn et Sy nc hr onous Moto
Bru shle ss DC Motor,B DC M)。两者最主要的区别在PMSM 每相感应出的电动势波形为
:
B m
B m
2.1
Magne t S ynchro nou s Motor,PMS M)
,从而省去了励磁线而产生旋转磁场,根据磁极异性相吸、同性相斥的原理,不论定子旋转磁极与永磁转子起始时的相对位置如何,定子的旋转磁极由于磁拉力拖着转子同步旋转,同步电机转速可表示为:
n
n s
p f
n
60
式中,f s为电源频率;pn为电机极对数。
永磁同步电机系统以其高效、高控制精度、高转矩密度等特点在电动车电驱动系统中
具有很高的应用价值。但是由于电动车的复杂运行工况造成的电机参数随温度、转速等因素的变化对系统的控制性能产生很大的影响。
2.2无刷直流电机(Brushless DC Motor,BDCM)
2.2.1 无刷直流电机工作原理
无刷直流电机是用装有永磁体的转子取代有刷直流电机的定子磁极,将原直流电机的电枢变为定子。有刷直流电机是依靠机械转向器将直流通入到转子绕组上,颠倒原直流电机定、转子和采用永磁体的好处是省去了机械换向器和电刷,消除了机械磨损,提高了功率密度。
无刷直流电机的位置传感器、控制电路以及功率开关器件组成的换向装置,使得无刷直流电机在运行过程中由定子绕组所产生的磁场和转动中的转子所产生的永磁磁场,在空间中始终保持90°的电角度。
下面以三相星形绕组半控桥电路加以说明无刷直流电机工作原理。图中,3个光电位置传感器VP1、VP2、VP3的安装位置各相差120°,V1、V2、V3是三个功率管。当VP1为高电平时,V1导通,电流流入A-A’,在定转子相互磁场的作用下使转子的磁极按照顺时针方向转动,当转子转过120°后,VP2为高电平,VP1为低电平,从而使V1截止,V2导通,电流从绕组A-A’断开而流入B-B’,转子磁场的作用下照顺时针方向继续转动120°后,VP3为高电平,VP2为低电平,从而使V2截止,V3导通,电流从绕组C-C’流入。由此可见,是位置传感器实现了各相绕组电流的换向。
+
2.2.2无刷直流电机数学模型
(1)电压方程
假设磁路不饱和,不计涡流和磁损耗,三相绕组完全对称,则三相绕组的电压平衡方程可表示为:
?????
?????+?????????????????????+????????????????
????=??????????c b a c b a c b a c b a e e e i i i P L M
M M L M M M L i i i r r r u u u 000000
式中:
ua ,u b,uc ——定子相绕组电压(V); i a ,ib ,i c——定子相绕组电流(A); e a,eb ,e c——定子相绕组电动势(V); r——定子三相绕组(Ω); L——每相绕组的自感(H); M ——绕组间的互感(H ); p ——微分算子(d/d t)。
由于转子磁阻不随转子位置变化而变化,因而定子绕组的自感和互感为常数。当三相绕组为Y 连接且没有中线时,则有:
0=++c b a i i i
故而有:
??
???
?????+?????????????????????---+????????????????
????=??????????c b a c b a c b a c b a e e e i i i P M L M L M L i i i r r r u u u 0
0000
0000000
因此可以得到无刷直流电机的等效电路图,如下图:
L-M
(2)转矩方程
永磁无刷直流电动机的电磁转矩是由定子绕组中的电流与转子磁极产生的磁场相互作用而产生的,定子绕组产生的电磁转矩表达式为
电磁转矩为:
ω)(c c b b a a i e i e i e T ++=,ω为电机转子的角速度。
在每相绕组感应电动势和电流同相位的情况下,电磁转矩又可以表示为:
m T I K T φ=
式中,KT 为转矩常数;Ф为电机每极气隙磁通量;I m 为定子绕组各相电流的幅值。
2.2.3 无刷直流电机的运行特性分析
电动机是一种输入电功率、输出机械功率的原动机械,对于无刷直流电机,其电势平衡方程式为:
U R I E U ave ave ?++=
式中:U 为电源电压(V);
E 为电枢绕组反电势(V); I a ve 为平均电枢电流(A);
R ave 为电枢绕组的平均电阻(Ω); △U 为功率器件的饱和管压降(V)。
(1)起动特性:
由于此时反电动势为零,电枢电流为ave R U U )(?-,其值可为正常工作电流的几倍到几十倍,所以起动电磁转矩很大,电动机可以很快起动。随着转子的加速,反电动势增加,电磁转矩减小,最后进入正常工作状态。 (2)电动运行特性:
电磁功率和转矩是正的,为电动性质。对功率管进行脉宽调制,改变占空比,就可以控制电流的平均值,从而控制平均转矩。
无刷直流电机外特性曲线类似于永磁直流电机,特性较硬,由于没有电刷和换向器,所以可以在高速下运行,这样电机的体积可缩小,重量减小,提高了可靠性,而且无刷直流电机的控制相对简单,这对于电动车驱动来讲很有意义。
3 开关磁阻电动机(Switched Reluct ance Mot or)
随着现代大功率半导体开关器件和现代控制技术的发展,才使开关磁阻电机驱动技术以高效率、高可靠性和一种新型机电一体化、具有软启动特性的调速传动技术面貌出现。 3.1开关磁阻电动机工作原理
开关磁阻电动机结构简单,为定、转子均由普通硅钢片叠压而成的双凸极结构,转子中没有绕组,定子中装有集中绕组,一般径向相对的两个绕组串联成一相。
开关磁阻电动机是根据磁场力原理工作的,如图所示,四相(8/6)开关磁阻电动机是由有绕组的8极定子和无绕组的6极转子构成,当沿径向相对的2个定子极通以直流电,形成一个磁场。该磁场使对应的一对转子磁极受力旋转与定子磁极中心线重合,开关磁阻电动机运行原理遵循“磁阻最小原理”——磁通总要沿着磁阻最小的路径闭合,而具有一定形状的铁
芯在移动到最小磁阻位置时,必使自己的主轴线与磁场的轴线重合。当定子D-D ‘
极励磁时,
所产生的磁力是转子旋转到转子轴线1-1’与定子极轴线D-D ‘
重合的位置,并使D 相励磁组的电感最大,若依次给D→A →B →C 相绕组通电,转子会按励磁顺序以逆时针方向连续旋转;反之,若依次给B →A →D →C 相绕组通电,转子会按励磁顺序以顺时针方向连续旋转。因此通过可控制加到开关磁阻电动机绕组中电流脉冲的幅值、宽度及其与转子的相对位置,即可控制开关磁阻电动机转矩的大小和方向。
3.2开关磁阻电机驱动系统构成
开关磁阻电机系统主要由四部分组成:SR电机本体、功率变换器、控制器及位置和电流检测器。它们之间的关系如图1所示:
3.3开关磁阻电机的运行特性
开关磁阻电机运行速度低于ωfc(第一临界速度)的范围内,为了保证Ψmax和i不超过允许值,采用改变电压、导通角和触发角三者中任一个或任两个,或三者同时配合控制。当开关磁阻电机在高于ωfc范围运行时,在外加电压、导通角和触发角都一定的条件下,随着转速的增加,磁链和电流将下降,转矩则随着转速的平方下降(如图中细实线)。为了得到恒功率特性,必须采用可控条件。但是外施电压最大值是由电源功率变换器决定的,而导通角又不能无限增加(一般不能超过半个转子极距)。因此,在电压和导通角都达最大时,能得到的最大功率的最高转速ωsc被称之为“第二临界转速”。当转速再增加时,由于可控条件都已经达到极限,转矩将随转速的二次方下降,如图所示。
开关磁阻电机一般运行在恒转矩区和恒功率区。在这两个区域中,电机的实际运行特性可控。通过控制条件,可以实现在粗实线以下的任意实际运行特性。而在串励特性区,电机的可控条件都已达极限,电机的运行特性不再可控,电机呈现自然串励运行特性,故电机一般不会运行在此区域。
运行时存在着第一、第二两个临界运行点是开关磁阻电机的一个重要特点。采用不同的可控条件匹配可以得到两个临界点的不同配置,从而得到各种各样所需的机械特性,这就是开关磁阻电动机具有优良调速性能的原因之一。从设计的观点看,两个临界点的合理配置是保证SR电动机设计合理,满足给定技术指标要求的关键。
从控制角度看,在上述两个区域采用不同的控制方法,在第一临界转速以下一般采用电流斩波控制方式(CCC方式),在第一、第二临界转速之间采用角度位置控制方式(APC方式)。
3.4 开关磁阻电动机系统的特点
开关磁阻电动机系统具有一些很有特色的优点:
(1)电机结构简单、坚固、制造工艺简单,成本低,可工作于极高转速;定子线圈嵌放容易,端部尺寸短而牢固。工作可靠,能适用于各种恶劣、高温甚至强振动环境;
(2)损耗主要产生在定子,电机易于冷却;转子无永磁体高温退磁现象:可允许有较高的温度;
(3)转矩方向与电流方向无关,因而可简化功率变换器,降低系统成本。同时功率变换器不会出现直通故障,可靠性高;
(4)起动转矩大,低速性能好,无感应电动机在起动时所出现的冲击电流现象;
(5)调速范围宽,控制灵活,易于实现各种特殊要求的转矩-速度特性;
(6)在较广的转速和功率范围内具有较高的效率,能四象限运行,具有较强的再生制动能力;
(7)有很好的容错能力,可以缺相运行。