基于双闭环PID控制的一阶倒立摆控制系统设计
一、设计目的
倒立摆是一个非线性、不稳定系统,经常作为研究比较不同控制方法的典型例子。设计一个倒立摆的控制系统,使倒立摆这样一个不稳定的被控对象通过引入适当的控制策略使之成为一个能够满足各种性能指标的稳定系统。
二、设计要求
倒立摆的设计要求是使摆杆尽快地达到一个平衡位置,并且使之没有
大的振荡和过大的角度和速度。当摆杆到达期望的位置后,系统能克服随机扰动而保持稳定的位置。实验参数自己选定,但要合理符合实际情况,控制方式为双PID控制,并利用MATLAB进行仿真,并用simulink对相应的模块进行仿真。
三、设计原理
倒立摆控制系统的工作原理是:由轴角编码器测得小车的位置和摆杆相对垂直方向的角度,作为系统的两个输出量被反馈至控制计算机。计算机根据一定的控制算法,计算出空置量,并转化为相应的电压信号提供给驱动电路,以驱动直流力矩电机的运动,从而通过牵引机构带动小车的移动来控制摆杆和保持平衡。
四、设计步骤
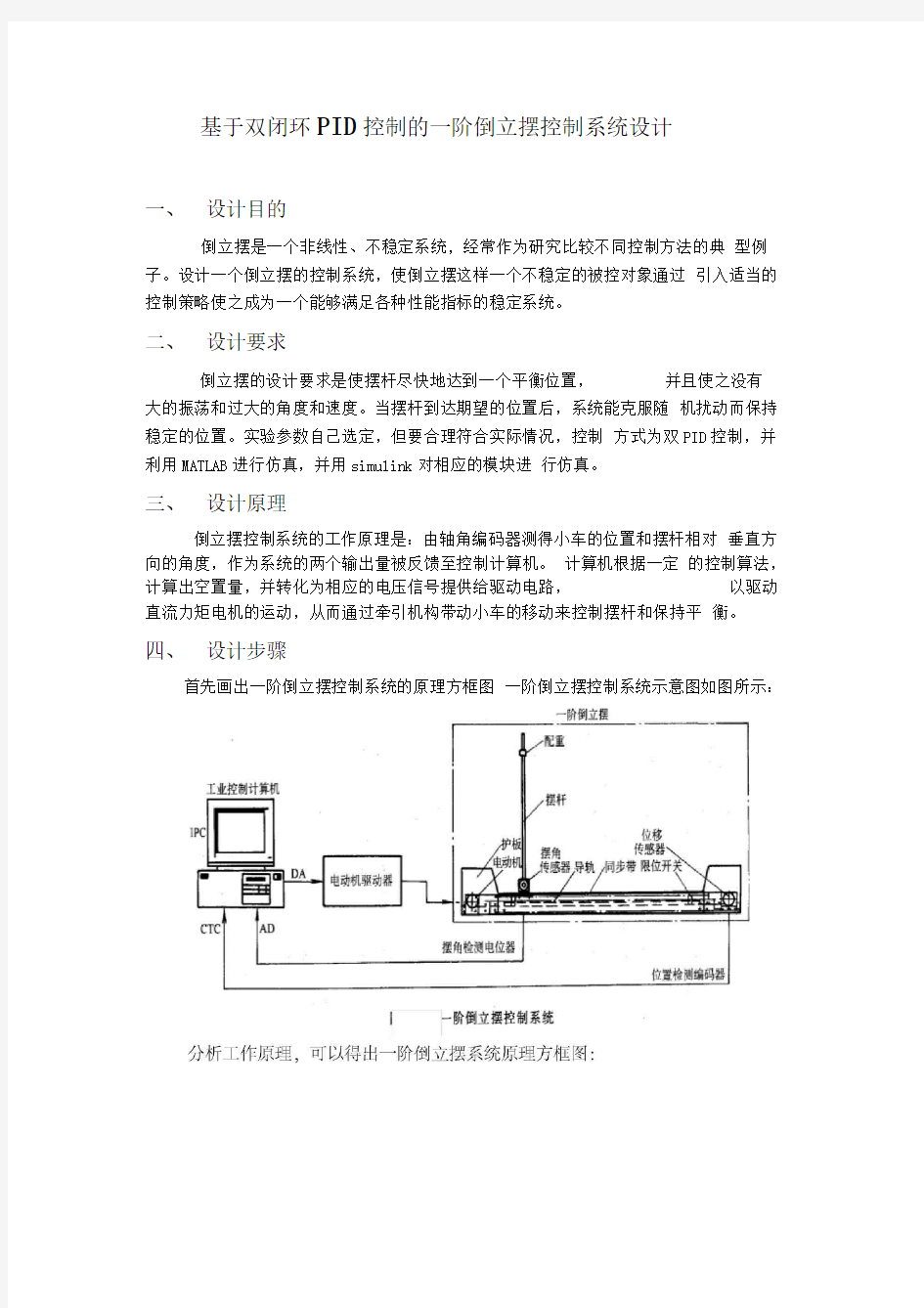
首先画出一阶倒立摆控制系统的原理方框图一阶倒立摆控制系统示意图如图所示:
工业控制计算机电动机驱动器一阶倒立摆
一阶倒立摆控制系统动态结构图
F面的工作是根据结构框图,分析和解决各个环节的传递函数!
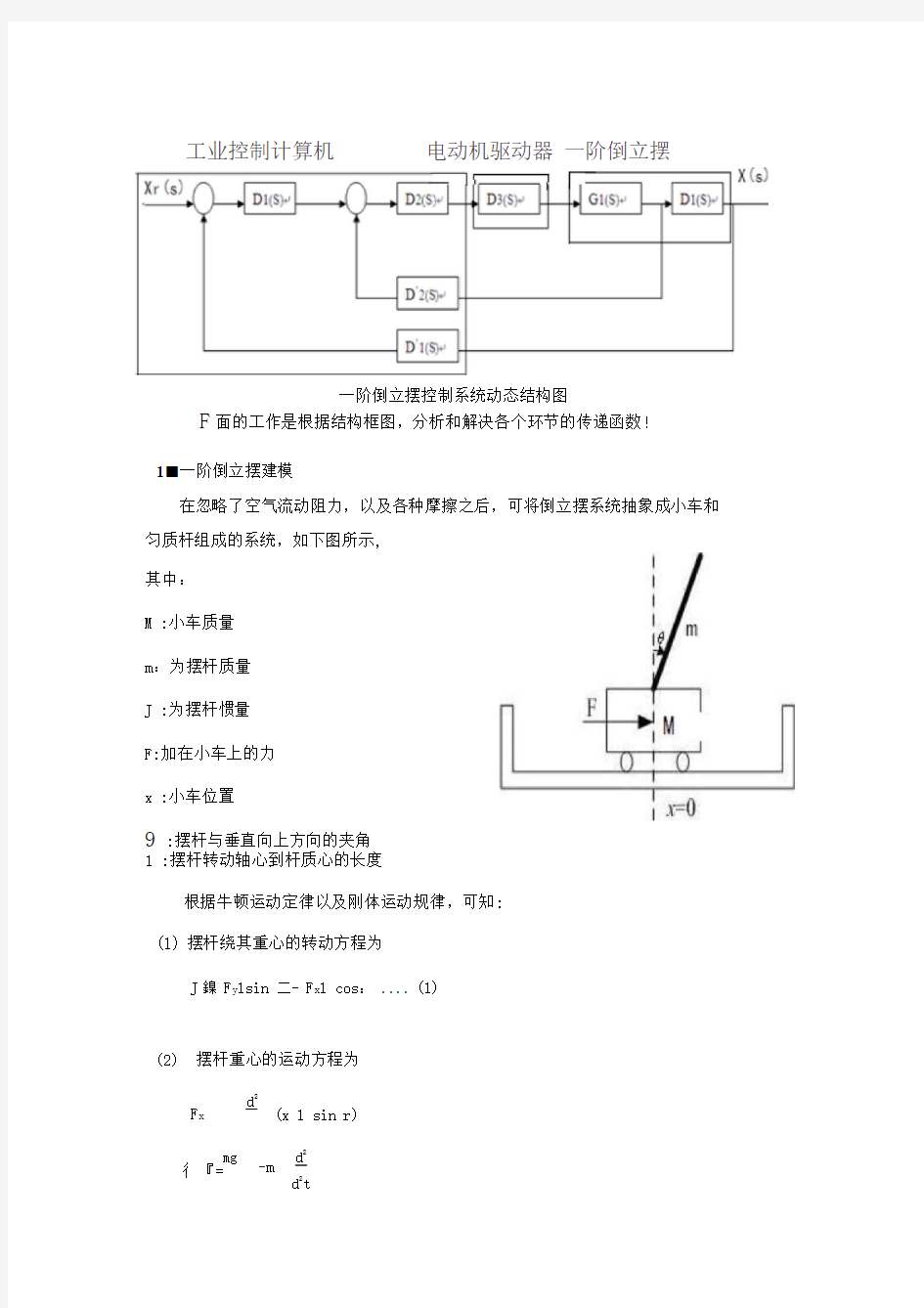
1■一阶倒立摆建模
在忽略了空气流动阻力,以及各种摩擦之后,可将倒立摆系统抽象成小车和匀质杆组成的系统,如下图所示,
其中:
M :小车质量
m:为摆杆质量
J :为摆杆惯量
F:加在小车上的力
x :小车位置
9 :摆杆与垂直向上方向的夹角
l :摆杆转动轴心到杆质心的长度
根据牛顿运动定律以及刚体运动规律,可知:
(1)摆杆绕其重心的转动方程为
J鎳F y lsin 二- F x l cos: (1)
(2)摆杆重心的运动方程为
F x d2
(x l sin r)
彳『=mg
-m
d2
d2t
(3) 小车水平方向上的运动为
阶倒立摆环节问题解决!
2.电动机驱动器
选用日本松下电工MSMA02型小惯量交流伺服电动机,其有关参数如下:
F — F x 二 M
d 2
x
联列上述4个方程,可以得出
一阶倒立精确气模型:
J ml 2
F ml J ml 2
sin u 2
-m 2
l 2
gsin r COST
2 2 2 2
J ml j[ M m :-m l cos)
mlcos v.F m 2
l 2
sin vcos m 2
-<; M m mlg sin v
m 2
l 2
cos 20 -(M + m^J +ml 2
)
式中J 为摆杆的转动惯量:
J 』
3
若只考虑B 在其工作点附近0 0=0附近(-10 —”:10 )的细微变化,则可 以近似认为:
* sin^比日 COS):
1
若取小车质量
M=2kg,摆杆质量 m=1kg,摆杆长度2 l =1m,重力加速度取
g=10m/s 2
,则可以得
一阶倒立摆简化模型:
x =0.44F -3.33^ v - -0.4 F 12^
拉氏变换 =^>
日(s) 』
F(s) x(s) ?(s)
-0.4
2
s-12
2 -1.1s 10
2
一1*+10
即 G 1(s)=
' ; G
2(s)=' -
x
(J ml 2
)F -m 2l 2
g J
J(M m) Mml (M m)mlg mlF J(M m) Mml
MSDA021A1A S 制电压:UDA=0± 10V。
若忽略电动机的空载转矩和系统摩擦,就可以认为驱动器和机械传动装置均为纯比例环节,并假设这两个环节的增益分别为Kd和Km
Kv
T m Ts2 T m s 1
G(s) =K d K v K^K s
―芒粧.6
即D3(s)=1.6
电动机驱动器部分问题解决!
3.双闭环PID控制器设计
U(S) D,和D2 (S) D2‘(S)的结构和参数。
(一)内环控制器的设计
其中,Ks=1.6为伺服电动机与减速机构的等效模型
驱动电压: U=0~100V 额定功率: PN=200W
额定转速: n=3000r/min 转动惯量: J=3X 10-6kg.m2
额定转矩: TN=0.64Nm 最大转矩: TM=1.91Nm
电磁时间常数:Tl=0.001s 电机时间常数:TM=0.003s
经传动机构变速后输出的拖动力为: F=0~16N与其配套的驱动器为: 剩下的问题就是如何确定控制器
反惯校正控制的系统内环框图
(b ) PD
1.控制器的选择
内环系统未校正时的传递函数为出
F(s) s -12
对于内环反馈控制器D2(s)可有PD , PI , PID 三种可能的结构形式,怎么选 取呢?这里,不妨采用绘制各种控制器结构下 “系统根轨迹”的办法加以分析比 较,从之选出一种比较适合的控制器结构。
各种控制器的开环传函的传递函数分别为:
在MATLAB 下输入以下程序用 凑试”的方法画根轨迹图: num=[分子]; den=[分母];
xlabel('Real Axis'); ylabel('lmag Axis'); axis([横、纵坐标范围]);
title('Root Locus'); grid; rlocus( nu m,de n)
下图为各种控制器下的系统根轨迹。
P:
-6-4K p s 2
-12 PD:
-6.4K D s -6.4K p
s 2
-12
PI : -6.4K p s -6.4K | s(s 2
-12)
PID : -6.4K p s 2
-6.4K p S-6.4K |
s(s 2
-12)
(a ) PD ReiJ Aua