《机械制图》(第六版)
习题集答案
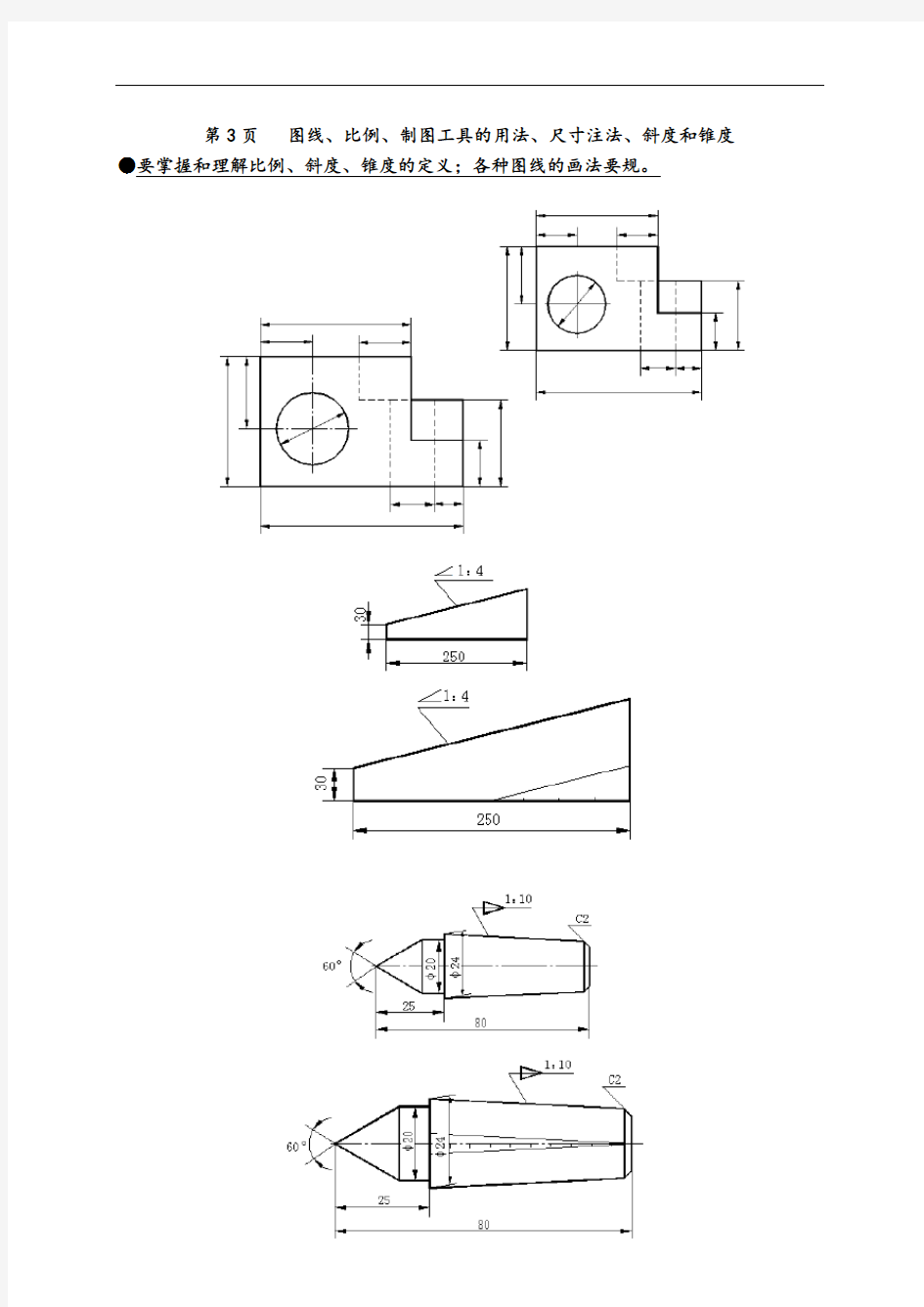
第3页图线、比例、制图工具的用法、尺寸注法、斜度和锥度●要掌握和理解比例、斜度、锥度的定义;各种图线的画法要规。
第4页椭圆画法、曲线板用法、平面图形的尺寸注法、圆弧连接
1、已知正六边形和正五边形的外接圆,试用几何作图方法作出正六边形,用试分法作出正五边形,它们的底边都是水平线。
●注意多边形的底边都是水平线;要规画对称轴线。
●正五边形的画法:
①求作水平半径ON的中点M;
②以M为圆心,MA为半径作弧,交水平中心线于H。
③AH为五边形的边长,等分圆周得顶点B、C、D、E
④连接五个顶点即为所求正五边形。
2、用四心圆法画椭圆(已知椭圆长、短轴分别为70mm、45mm)。
●参教P23四心圆法画椭圆的方法做题。注意椭圆的对称轴线要规画。
3~4、在平面图形上按1:1度量后,标注尺寸(取整数)。
5、参照左下方所示图形的尺寸,按1:1在指定位置处画全图形。
第6页点的投影
1、按立体图作诸点的两面投影。
●根据点的两面投影的投影规律做题。
2、已知点A在V面之前36,点B在H面之上,
点D在H面上,点E在投影轴上,补全诸的两面
投影。
●根据点的两面投影的投影规律、空间点的直角
坐标与其三个投影的关系及两点的相对位置做
题。
3、按立体图作诸点的两面投影。
●根据点的三面投影的投影规律做题。
4、作出诸点的三面投影:点A(25,15,20);点B距离投影面W、V、H分别为20、10、15;点C在A之左,A之前15,A之上12;点D在A之下8,与投影面V、H等距离,与投影面W的距离是与H面距离的3.5倍。
●根据点的投影规律、空间点的直角坐标与其三个投影的关系及两点的相对位置做题。各点坐标为:
A(25,15,20)
B(20,10,15)
C(35,30,32)
D(42,12,12)
5、按照立体图作诸点的三面投影,并表明可见性。
●根据点的三面投影的投影规律做题,利用坐标差进行可见性的判断。(由不为0的坐标差决定,坐标值大者为可见;小者为不可见。)
6、已知点A距离W面20;点B距离点A为25;点C与点A是对正面投影的重影点,y 坐标为30;点D在A的正下方20。补全诸点的三面投影,并表明可见性。
●根据点的三面投影的投影规律、空间点的
直角坐标与其三个投影的关系、两点的相对
位置及重影点判断做题。
各点坐标为:
A(20,15,15)
B(45,15,30)
C(20,30,30)
D(20,15,10)
第7页直线的投影(一)
1、判断下列直线对投影面的相对位置,并填写名称。
●该题主要应用各种位置直线的投影特性进行判断。(具体参见教P73~77)
AB是一般位置直线; EF是侧垂线;
CD是侧平线; KL是铅垂线。
2、作下列直线的三面投影:
机械振动习题集 同济大学机械设计研究所 2004.9 1_简谐运动及其运算
1-1求下列简谐函数的单边复振幅和双边复振幅 (1))3 sin(2π ω+ =t x (2))4 10cos(4π π+ =t x (3))452cos(3?+=t x π 1-2通过简谐函数的复数表示,求下列简谐函数之和。 (1))3 sin(21π ω+ =t x )3 2sin(32πω+ =t x (2)t x π10sin 51= )4 10cos(42π π+ =t x (3))302sin(41?+=t x π )602sin(52?+=t x π )452cos(33?+=t x π )382cos(74?+=t x π )722cos(25?+=t x π 答案: (1))6.6cos(359.412?+=t x ω (2))52.4710cos(566.312?-=t x π (3))22.92cos(776.1412345?+=t x π 1-3试计算题1中)(t x 的一阶对数和二阶导数对应的复振幅,并给出它们的时间历程。 1-4设)(t x 、)(t f 为同频简谐函数,并且满足)(t f cx x b x a =++&&&。试计算下列问题 (1)已知)3712sin(10)(,25,6,5.1ο+====πt x c b a ,求)(t f (2)已知)647sin(25)(,30,7,3ο+====πt f c b a ,求)(t x 1-5简述同向异频简谐振动在不同频率和幅值下合成的不同特点。 1-6利用“振动计算实用工具”,通过变换频率和相位总结垂直方向振动合成的特点。 2_单自由度系统振动 2-1请解释有阻尼衰减振动时的固有圆频率d ω为什么总比自由振动时的固有圆频率n ω小? 答案:因为n d ωξ ω2 1-=,ξ<1 2-2在欠阻尼自由振动中,把ξ改成的时候,有人说曲线不过X 轴了,这种说法正确么,请说明理由? 答案:ξ<1为小阻尼的衰减振动,当然过X 轴 2-3在单自由度自由振动时候,给定自由振动时的固有圆频率n ω,阻尼系数ξ,初始位移0x ,以及初始速度0v ,利用本计算工具,请计算有阻尼衰减振动时的固有圆频率d ω.
机械电子工程.陆敏恂男1949.03 409 080202机械电子工程.严继东男1949.07 410 080202机械电子工程.乌建中男1953.11 411 080202机械电子工程.王安麟男1954.08 412 080202机械电子工程.周奇才男1962.04 413 080202机械电子工程. 炯男1963.10 414 080202机械电子工程.訚耀保男1965.02 415 080202机械电子工程.万莉女1965.06 416 080202机械电子工程.米智楠男1967.03 417 080202机械电子工程.周爱国男1973.01 陆敏恂教授简介 陆敏恂,男,1949年3月4日生,工学博士,教授,博士生导师,毕业于同济大学机械设计及理论专业,曾在德国布伦瑞克技术大学汽车研究所学习和德国大众汽车公司进修,中国工程机械学会液压分会理事、副秘书长,现从教于同济大学机械工程学院机械电子研究所。从事液压传动与控制,研究方向为工程机械液压系统和液压振动技术,为同济大学地下穿孔机研制小组主要成员。曾先后主持和参加科研和技术开发项目30多项,主持八六三课题新型曲线地下穿孔机方向检测、发讯和导向控制机理的研究。获国家教委科技进步一等奖,国家教委科技进步二等奖,市科技进步二等奖,国家教育部科技进步三等奖各一项和其它多项奖项,有国家发明专利和实用新型专利多项,在各种杂志先后发表论文三十余篇。 陆敏恂1949年3月4日生于,汉族,籍贯,中国共产党党员,工学博士,教授,博士生导师。现任同济大学党委副书记,校工会主席。 目录 1简介 2荣誉表彰 1简介 1973年进同济大学机电系工程机械专业学习,1977年毕业。1993年8月至1994年8月在德国布伦瑞克技术大学汽车研究所学习,1994年8月1995年3月在德国狼堡大众汽车公司进修。1997年至2002年在同济大学攻读机械设计及理论专业,获工学博士学位。在同济大学先后任助教、讲师、副教授、教授,从教于同济大学机械工程学院机械电子研究所,从事液压传动与控制,研究方向为工程机械液压系统和液压振动技术,为同济大学地下穿孔机研制小组主要成员。是中国工程机械学会液压分会理事、副秘书长。
第一章检测题) 命题人:张雨萌检测人:刘军录 一、命题意图说明:这套试题本着“重视基础,考查能力,体现导向,注重发展”的命题原则,并结合教学实际和学生实际,立足基础,难易适中,做到思想性、科学性、技术性的统一,体现了先进的教学理念,注重基础知识的巩固,从现有能力水平和学生发展潜力角度,全面关注学生的学习。体现课程标准的理念,检测学科核心知识与能力,对学科教学有较好的引导作用,体现了评价功能,贴近学生的生活,充分考虑学生的认知水平,具有鲜明的时代感。本套试题覆盖选修3-4 第一章的所有内容。 二、试卷结构特点: 1.试卷结构(时间60 分钟,全卷共100 分) 2.试卷的基本技术指标 (1)题型及比例 基础知识性试题在试卷总分值中约占60%,中等难度试题在试卷总分值中约占30%,开放性试题的比例约为试卷总分值的10%。 (2)试题的难度简单题占60%,中等题占30%,难题占10%。 (3)试题的数量 第一卷共10道题,第二卷共7 道题,全卷共三道大题,17道小题。 三、试题简说:在本套试卷中,按照选择题和非选择题分类,由易而难,紧扣教材,灵活多样,充分体现了新课程理念,这种考查方式有利于调动学生的学习兴趣,培养和提高参与物理活动的能力。例如第5 小题,考查简谐运动的特点,就是针对机械振动部分的教学内容,让学生学有所获,注重积累,与课本知识联系紧密。第17 小题,考查简谐运动在力学问题上的应用,与必修一、二所学知识相联系,注重探究过程,体现了新课程的教学理念。第一课件网第一课件网 .选择题(共10个小题,每题4 分,共40分。在下列各题中,有的小题只有一个选项正确,有的小题有多个选项正确。全部选对的得4 分,漏选的得2 分,错选、不选的得0 分) 1.关于简谐振动的加速度,下列说法正确的是( ) A.大小与位移成正比,方向一周期变化一次 B.大小不变,方向始终指向平衡位置 C.大小与位移成正比,方向始终指向平衡位置
第一章函数与极限 教学目的: 1、理解函数的概念,掌握函数的表示方法,并会建立简单应用问题中的函数关系式。 2、了解函数的奇偶性、单调性、周期性和有界性。 3、理解复合函数及分段函数的概念,了解反函数及隐函数的概念。 4、掌握基本初等函数的性质及其图形。 5、理解极限的概念,理解函数左极限与右极限的概念,以及极限存在与左、右极限 之间的关系。 6、掌握极限的性质及四则运算法则。 7、了解极限存在的两个准则,并会利用它们求极限,掌握利用两个重要极限求极限 的方法。 8、理解无穷小、无穷大的概念,掌握无穷小的比较方法,会用等价无穷小求极限。 9、理解函数连续性的概念(含左连续与右连续),会判别函数间断点的类型。 10、了解连续函数的性质和初等函数的连续性,了解闭区间上连续函数的性质(有 界性、最大值和最小值定理、介值定理),并会应用这些性质。 教学重点: 1、复合函数及分段函数的概念; 2、基本初等函数的性质及其图形; 3、极限的概念极限的性质及四则运算法则; 4、两个重要极限; 5、无穷小及无穷小的比较; 6、函数连续性及初等函数的连续性; 7、区间上连续函数的性质。 教学难点: 1、分段函数的建立与性质; 2、左极限与右极限概念及应用; 3、极限存在的两个准则的应用; 4、间断点及其分类; 5、闭区间上连续函数性质的应用。 §1. 1 映射与函数 一、集合 1. 集合概念 集合(简称集): 集合是指具有某种特定性质的事物的总体. 用A, B, C….等表示. 元素: 组成集合的事物称为集合的元素. a是集合M的元素表示为a?M. 集合的表示: 列举法: 把集合的全体元素一一列举出来. 例如A?{a, b, c, d, e, f, g}. 描述法: 若集合M是由元素具有某种性质P的元素x的全体所组成, 则M可表示为
《线性代数》课程教学大纲 英文名称:Linear algebra 课程编码:0 总学时:40 学分:2.5 适用对象:本科各理工科专业 先修课程:高等数学 大纲主撰人:万冰蓉大纲审核人: 一、课程性质、目的和任务 1、本课程是本科各理工科专业的一门学科基础课。线性问题广泛存在于科学技术的各个领域,而某些非线性问题在一定条件下,可转化为线性问题,因此本课程所介绍的方法广泛适用于各个学科。 2、目的是使学生掌握该课程的基本理论与方法,培养逻辑推理能力,抽象思维能力,计算能力和解决实际问题的能力,并为学习相关课程及进一步扩大数学知识面奠定必要的基础。 二、教学内容及要求 本课程内容按教学要求的不同分两个层次;对较高要求的必须使学生深入理解,牢固掌握,熟练应用的概念理论用“理解”一词表述,方法、运算用“掌握”一词表述;对教学中必不可少的,但在要求上低于前者的概念、理论用“了解”一词表述,方法、运算用“会”或“了解”表述。 第1章:行列式 授课学时:6 基本要求: 1-1掌握二阶与三阶行列式的定义。 1-2了解全排列与逆序数。 1-3了解n阶行列式的概念。 1-4掌握行列式的性质,并会应用行列式的性质计算行列式。 1-5会用行列式按行(列)展开定理计算行列式。 1-6会用克莱姆(Cramer)法则。 重点:利用行列式的性质及行列式按行(列)展开定理计算行列式。
难点:n阶行列式的概念,利用行列式的性质及行列式按行(列)展开定理计算行列式。 作业:课本32页,3,4(4),5(2)、(4)、(5),6,7(3)、(4)、(6),8(1),9 第2章:矩阵及其运算 授课学时:6 基本要求: 2-1理解矩阵概念,了解单位矩阵,对角矩阵,对称矩阵及其性质; 2-2掌握矩阵的线性运算、乘法、转置、方阵的行列式及其运算规律。 2-3理解逆矩阵的概念、逆矩阵存在的条件,会用伴随矩阵求矩阵的逆。 2-4了解分块矩阵及其运算。 重点:矩阵的乘法、逆矩阵的定义及伴随矩阵算法。 难点:矩阵的乘法,分块矩阵的乘法。 作业:课本66页,2,3,5,6,8,9,10,11(4)、(6),12(3),13(2),16,18,19,20 第3章:矩阵的初等变换与线性方程组 授课学时:6 基本要求: 3-1掌握矩阵的初等变换,会用矩阵的初等行变换解线性方程组,了解初等矩阵的性质,掌握用初等变换求逆矩阵的方法。 3-2理解矩阵的秩的概念,掌握用初等变换求矩阵的秩的方法,了解矩阵的秩的性质。 3-3理解齐次线性方程有非零解的充分必要条件及非齐次线性方程有解的充分必分条件。 重点:求线性方程组通解的方法,矩阵的秩的概念和求逆矩阵的初等变换方法,线性方程组的相容性定理。 难点:矩阵的秩的概念,初等矩阵与矩阵的初等变换的关系,线性方程组的相容性定理。作业:课本92页,2,3,4,5(1),6(1),7(1)、(3),8,10,11(1),12(2) 第4章:向量的线性相关性 授课学时:8 基本要求: 4-1理解n维向量的概念,向量的线性组合与线性表示,会用矩阵的秩判断向量的线性表示关系。 4-2理解向量组线性相关、线性无关的定义,会用矩阵的秩判别向量组的线性相关性,了解
同济大学线性代数第六版答案(全) 1 利用对角线法则计算下列三阶行列式201 (1)1 4 ***** 解1 4 183 2 ( 4) 3 0 ( 1) ( 1) 1 1 8 0 1 3 2 ( 1) 8 1 ( 4) ( 1) 2 4 8 16 4 4 abc (2)bca cababc 解bca cab acb bac cba bbb aaa ccc 3abc a3 b3 c3 111 (3)abc a2b2c2111 解abc a2b2c2 bc2 ca2 ab2 ac2 ba2 cb2 (a b)(b c)(c a) xyx y (4)yx yx x yxyxyx y 解yx yx x yxy x(x y)y yx(x y) (x y)yx y3 (x y)3 x3 3xy(x y) y3 3x2 y x3 y3 x3 2(x3 y3) 2 按自然数从小到大为标准次序求下列各排列的逆序数 (1)1 2 3 4 解逆序数为0 (2)4 1 3 2
解逆序数为4 41 43 42 32 (3)3 4 2 1 解逆序数为5 3 2 3 1 4 2 4 1, 2 1 (4)2 4 1 3 解逆序数为3 2 1 4 1 4 3 (5)1 3 (2n 1) 2 4 (2n) n(n 1) 解逆序数为 2 3 2 (1个) 5 2 5 4(2个) 7 2 7 4 7 6(3个) (2n 1)2 (2n 1)4 (2n 1)6 (2n 1)(2n 2) (n 1个) (6)1 3 (2n 1) (2n) (2n 2) 2 解逆序数为n(n 1) 3 2(1个) 5 2 5 4 (2个) (2n 1)2 (2n 1)4 (2n 1)6 (2n 1)(2n 2) (n 1个) 4 2(1个) 6 2 6 4(2个) (2n)2 (2n)4 (2n)6 (2n)(2n 2) (n 1个) 3 写出四阶行列式中含有因子a11a23的项解含因子a11a23的项的一般形式为 ( 1)ta11a23a3ra4s 其中rs是2和4构成的排列这种排列共有两个即24和42 所以含因子a11a23的项分别是 ( 1)ta11a23a32a44 ( 1)1a11a23a32a44 a11a23a32a44 ( 1)ta11a23a34a42 ( 1)2a11a23a34a42 a11a23a34a42 4 计算下列各行列式 41 (1)***-*****14 2 07 41 解***-*****c2 c***** 1 ***** 104 1 10 2 122 ( 1)4 3 *****c 4 7c***** 3 1 4 4 110c2 c***** 123 142c00 2 0 1 2c***** 2 (2)31 1***** 22 4 解31 ***** c 4 c3 223 1202r 4 r ***-*****06 ***-*****
实验三:简谐振动幅值测量 一、 实验目的 1、了解振动位移、速度、加速度之间的关系。 2、学会用压电传感器测量简谐振动位移、速度、加速度幅值 二、实验仪器安装示意图 三、 实验原理 由简谐振动方程:)sin()(?ω-=t A t f 简谐振动信号基本参数包括:频率、幅值、和初始相位,幅值的测试主要有三个物理量,位移、速度和加速度,可采取相应的传感器来测量,也可通过积分和微分来测量,它们之间的关系如下: 根据简谐振动方程,设振动位移、速度、加速度分别为x 、v 、a ,其幅值分别为X 、V 、A : )sin(?ω-=t X x )cos()cos(?ω?ωω-=-==t V t X x v )sin()sin(2?ω?ωω-=--==t A t X x a 式中:ω——振动角频率 ?——初相位 所以可以看出位移、速度和加速度幅值大小的关系是:X V A X V 2ωωω===,。 振动信号的幅值可根据位移、速度、加速度的关系,用位移传感器或速度传感器、加速度传感器进行测量,还可采用具有微积分功能的放大器进行测量。 在进行振动测量时,传感器通过换能器把加速度、速度、位移信号转换成电信号,经过放大器放大,然后通过AD 卡进行模数转换成数字信号,采集到的数字信号为电压变化量,通过软件在计算机上显示出来,这时读取的数值为电压值,通过标定值进行换算,就可计算出振动量的大
小。 DASP 通过示波调整好仪器的状态(如传感器档位、放大器增益、是否积分以及程控放大倍数等)后,要在DASP 参数设置表中输入各通道的工程单位和标定值。工程单位随传感器类型而定,或加速度单位,或速度单位,或位移单位等等。 传感器灵敏度为K CH (PC/U )(PC/U 表示每个工程单位输出多少PC 的电荷,如是力,而且参数表中工程单位设为牛顿N ,则此处为PC/N ;如是加速度,而且参数表中工程单位设为m/s 2 ,则此处为PC/m/s 2 ); INV1601B 型振动教学试验仪输出增益为K E ;积分增益为K J (INV1601 型振动教学试验仪的一次积分和二次积分K J =1); INV1601B 型振动教学试验仪的输出增益: 加速度:K E = 10(mV/PC) 速度:K E = 1 位移:K E = 0.5 则DASP 参数设置表中的标定值K 为: )/(U mV K K K K J E CH ??= 四、 实验步骤 1、安装仪器 把激振器安装在支架上,将激振器和支架固定在实验台基座上,并保证激振器顶杆对简支梁有一定的预压力(不要露出激振杆上的红线标识),用专用连接线连接激振器和INV1601B 型振动教学试验放大仪的功放输出接口。把带磁座的加速度传感器放在简支梁的中部,输出信号接到 INV1601B a 加速度。 2、打开INV1601B 型振动教学试验仪的电源开关,开机进入DASP2006 标准版软件的主界面,选择单通道按钮。进入单通道示波状态进行波形示波。 3、在采样参数设置菜单下输入标定值K 和工程单位m/s 2 ,设置采样频率为4000Hz ,程控倍数1倍。 4、调节INV1601B 型振动教学试验仪频率旋钮到40Hz 左右,使梁产生共振。 5、在示波窗口中按数据列表进入数值统计和峰值列表窗口,读取当前振动的最大值。 6、改变档位v (mm /s )、d (mm )进行测试记录。 7、更换速度和电涡流传感器分别测量a (m /s 2 )、v (mm /s )、d (mm )。
2018年湖南省怀化市中考物理试卷 一、选择区 1. 下图中符合安全用电原则的是() A. 雷雨时在大树下躲雨 B. 在高压线下钓鱼 C. 在同一插座上同时使用多个大功率用电器 D. 发现有人触电时立即切断电源 【答案】D 【解析】A、雷雨时,不可以在大树下避雨,要注意防雷电,故A错误; B、高压线下钓鱼,鱼线很容易接触到高压线,容易发生触电事故,故B错误; C、在同一个插座上同时使用了多个大功率的用电器,由可得,会使干路中的电流过大,容易发生电路火灾,故C错误; D、当发现有人触电时,应该立即采取的措施是:迅速切断电源或用绝缘体挑开电线,因为人体是导体,不能用手拉开电线和触电的人,故D正确。 故选:D。 点睛:本题考查日常安全用电常识,关键是了解安全用电的基本原则“不接触低压带电体,不靠近高压带电体。” 2. 在北京8分钟的节目中,憨态可掬的大熊猫令人忍俊不禁。这只大熊猫是用一种特制的铝合金材料制成的,它的高度为2.35m,质量却只有10kg,它利用了铝合金的哪一种性质() A. 质量小 B. 密度小 C. 比热容小 D. 导热性能好 【答案】B 【解析】解:由题知,大熊猫是用一种特殊的铝合金材料制成的,它的高为2.35m,质量却只有10kg,也就是说它的体积很大,质量很小,根据ρ=可知,材料的体积相同时,质量越小,密度越小。所以它利用
了铝合金密度小的性质。故ACD错误,B正确。 故选:B。 点睛:密度是物质的一种特性,不同物质密度一般不同,常用密度来鉴别物质。解答本题时,要紧扣大熊猫高度大,质量小的特点进行分析。 3. 下列事例中不是利用大气压工作的是() A. 用塑料吸管吸饮料 B. 用抽水机抽水 C. 用注射器将药液注入病人体内 D. 钢笔吸墨水 【答案】C 【解析】解:A、用吸管吸饮料时,吸管内的气压小于外界大气压,饮料在外界大气压的作用下,被压入口腔内。利用了大气压。故A不合题意; B、抽水机抽水,通过活塞上移或叶轮转动使抽水机内水面上方的气压减小,水在外界大气压的作用下,被压上来,利用了大气压,故B不合题意。 C、用注射器将药液注入病人体内是利用人的压力将药液注入人体肌肉的,不是利用大气压来工作的,故C 符合题意。 D、用力一按橡皮囊,排出了里面的空气,当其恢复原状时,橡皮囊内部气压小于外界大气压,在外界大气压的作用下,墨水被压入钢笔内,利用了大气压。故D不合题意。 故选:C。 点睛:本题考查了大气压的应用,此类问题有一个共性:通过某种方法,使设备内部的气压小于外界大气压,在外界大气压的作用下出现了这种现象。 4. 自然界中有些能源一旦消耗就很难再生,因此我们要节约能源。在下列能源中,属于不可再生的能源的是 A. 水能 B. 风能 C. 太阳能 D. 煤炭 【答案】D D、煤炭属于化石燃料,不能短时期内从自然界得到补充,属于不可再生能源,故D符合题意。
机械振动测试 一、单选题(共 10 小题) 1、做简谐运动的物体,振动周期为2s,运动经过平衡位置时开始计时,那么当t=1.2s时,物体: () A.正在做加速运动,加速度的值正在增大 B.正在做减速运动,加速度的值正在减小 C.正在做减速运动,加速度的值正在增大 D.正在做加速运动,加速度的值正在减小 2、使物体产生振动的必要条件: () A.物体所受到的各个力的合力必须指向平衡位置; B.物体受到的阻力等于零; C.物体离开平衡位置后受到回复力的作用,物体所受的阻力足够小; D.物体离开平衡位置后受到回复力f的作用,且f=-kx(x为对平衡位置的位移). 3、如图是演示简谐运动图像的装置,当沙漏斗下面的薄木板N被匀速地拉出时,振动着的漏斗中漏出的沙在板上形成的曲线显示出摆的位移随时间变化的关系.板上的直线OO1代表时间轴,右图中是两个摆中的沙在各自板上形成的曲线,若板N1和板N2拉动的速度v1和v2的关系为v2=2v1,则板N1、N2上曲线所代表的周期T1和T2的关系为: A.T2=T1. B.T2=2T1. C.T2=4T1.() 4、两个弹簧振子,甲的固有频率为2f,乙的固有频率为3f,当它们均在频率为4f的策动力作用下做受迫振动,则: () A.甲的振幅较大,振动频率为2f B.乙的振幅较大,振动频率为3f C.甲的振幅较大,振动频率为4f D.乙的振幅较大,振动频率为4f 5、做简谐运动的物体每次通过同一位置时,可能不相同的物理量有 : ()
A.速度 B.加速度 C.回复力 D.动能. 6、把调准的摆钟由北京移到赤道,这钟: () A.变慢了,要使它变准应该增加摆长 B.变慢了,要使它变准应该减短摆长 C.变快了,要使它变准应该增加摆长 D.变快了,要使它变准应该减短摆长 7、作受迫振动的物体到达稳定状态时: () A.一定作简谐运动 B.一定做阻尼振动C.一定按驱动力的频率振动 D.一定发生共振 8、用长为l的细线把一个小球悬挂在倾角为θ的光滑斜面上,然后将小球偏离自然悬挂的位置拉到A点,偏角α≤5°,如图所示.当小球从A点无初速释放后,小球在斜面上往返振动的周期为: () 9、一个单摆做简谐运动,周期为T,在下列情况中,会使振动周期增大的是: ()A.重力加速度减小 B.摆长减小 C.摆球的质量增大 D.振幅减小 10、关于简谐运动,下列说法中错误的是: ()A.回复力的方向总是与位移方向相反 B.加速度的方向总是与位移方向相反 C.速度方向有时与位移方向相同,有时与位移方向相反 D.简谐运动属于匀变速直线运动 二、多选题(共 6 小题) 11、弹簧振子做简谐运动时,各次经过同 一位置,一定相等的物理量是 : () A.速度 B.加速度 C.动能 D.弹性势能 12、(如图),则下列说法中正确的是: () A.t1和t2时刻质点速度相同; B.从t1到t2的这段时间内质点速度方向和加速度方向相同; C.从t2到t3的这段时间内速度变大,而加速度变小; D.t1和t3时刻质点的加速度相同. 13、作简谐振动的物体向平衡位置运动时,速度越来越大的原因是: () A.回复力对物体做正功,使其动能增加; B.物体惯性的作用; C.物体的加速度在增加; D.物体的势能在转化为动能. 14、图所示为质点的振动图像,下列判断中正确的是: A.质点振动周期是8s;
机械振动习题集
同济大学机械设计研究所 2004.9 1_简谐运动及其运算 1-1求下列简谐函数的单边复振幅和双边复振幅 (1))3sin(2π ω+ =t x (2))4 10cos(4π π+ =t x (3))452cos(3?+=t x π 1-2通过简谐函数的复数表示,求下列简谐函数之和。 (1))3 sin(21π ω+ =t x )3 2sin(32πω+ =t x (2)t x π10sin 51= )4 10cos(42π π+ =t x (3))302sin(41?+=t x π )602sin(52?+=t x π )452cos(33?+=t x π )382cos(74?+=t x π )722cos(25?+=t x π 答案: (1))6.6cos(359.412?+=t x ω (2))52.4710cos(566.312?-=t x π (3))22.92cos(776.1412345?+=t x π 1-3试计算题1中)(t x 的一阶对数和二阶导数对应的复振幅,并给出它们的时间历程。 1-4设)(t x 、)(t f 为同频简谐函数,并且满足)(t f cx x b x a =++&&&。试计算下列问题 (1)已知)3712sin(10)(,25,6,5.1ο+====πt x c b a ,求)(t f (2)已知)647sin(25)(,30,7,3ο+====πt f c b a ,求)(t x 1-5简述同向异频简谐振动在不同频率和幅值下合成的不同特点。 1-6利用“振动计算实用工具”,通过变换频率和相位总结垂直方向振动合成的特点。
第一章机械加工方法 第二节机械加工方法 一、车削IT8-IT7,Ra6.3-1.6 二、铣削IT8-IT7, Ra6.3-0.8 顺铣和逆铣(按照主运动速度方向与工件进给方向相同或相反) 顺铣: 1、铣削力的水平分力与进给方向相同,切削力容易引起工件和工作台一起向前窜动, 使进给量突然增大,引起打刀; 2、铣刀齿首先接触工件硬皮,加剧铣刀磨损。 逆铣: 1、切削厚度从零开始逐渐增大,切削刃开始经历了一段在切削硬化表面上挤压滑行的 阶段,加速刀具磨损; 2、铣削力有将工件上抬的趋势,引起振动。 三、刨削IT8-IT7, Ra3.2-0.8 四、钻削与镗削 钻削:IT13-IT11 铰削:IT9-IT8 镗孔:IT10-IT8 钻孔与镗孔区别: 1、钻孔:原本无孔;镗孔:原本有孔; 2、钻孔:得到的孔的直径不大;镗孔:可以得到很大的直径。 铰孔无法提高孔轴线的位置精度及直线度;而镗孔的轴线是由镗杆的回转轴线决定的,可以矫正原底孔轴线的位置精度。 五、齿面加工 1、成型法 2、展成法:速度传动链、展成传动链、轴向进给传动链、差动传动链(直齿没有) 六、磨削IT7-IT5 七、特种加工 1、电火花加工 利用工件电极和工具电极间瞬时火花放电产生的高温,溶蚀工件材料来获得零件成 型。 2、电解加工 利用金属在电解液中阳极溶解的电化学原理对工件成型加工。 生产率高、无切削力和切削热,适于易变形和薄壁零件加工。 3、激光加工 能量密度高、方向性好、单色性好、相干性好。 与电火花加工区别: 产生高温的额原理不同。 4、超声波加工
利用超声频振动的工具端面冲击工作液中的悬浮磨粒,由磨粒对工件表面撞击抛磨来实现对工件加工。 第二章金属切削原理与刀具 刀具的结构 一、切削运动:主运动和进给运动 切削要素包括切削用量和切削层的几何参数: 切削用量: 1、切削速度v 2、进给量f 3、背吃刀量ap 切削层几何参数: 1、切削宽度:aw 2、切削厚度:ac 3、切削面积:A 二、刀具角度: 1.切削部分:前面、主后面、副后面、主切削刃、副切削刃、刀尖 2.刀具角度参考平面:切削平面Ps、正交平面Po、基面Pr 3.刀具的标注角度:(正交平面)前角、后角、(基面)主偏角、副偏角、(切削 平面)刃倾角 三、刀具种类 车刀:加工外圆、内孔、端面、螺纹、切槽和切断。 在结构上分:(高速钢)整体式、(硬质合金钢)焊接式和机械夹固刀片式(机夹车刀和可转位车刀) 选用齿轮滚刀和插齿刀时,应注意: 1 刀具基本参数应与被加工齿轮相同; 2 刀具精度等级应与被加工齿轮要求的精度等级相当; 3 刀具旋向应尽可能与被加工齿轮的旋向相同。滚切直齿轮时,一般用左旋滚刀。 第一节刀具材料 一、刀具材料应具备的性能: 高硬度、高耐磨性、高耐热性、高强度和韧性、良好的工艺性、良好的热物理性能和耐冲击性 二、常用的刀具材料 碳素工具钢和合金工具钢、高速钢、硬质合金钢、陶瓷、人造金刚石、立方氮化硼硬质合金钢:YG/YT YG类韧性好,耐磨性差,适用于加工铸铁、青铜等脆性材料
高等数学(同济第六版)上册期末复习重点 第一章:1、极限(夹逼准则) 2、连续(学会用定义证明一个函数连续,判断间断点类型) 第二章:1、导数(学会用定义证明一个函数是否可导)注:连续不一定可导,可导一定连续 2、求导法则(背) 3、求导公式也可以是微分公式 第三章:1、微分中值定理(一定要熟悉并灵活运用--第一节) 2、洛必达法则 3、泰勒公式拉格朗日中值定理 4、曲线凹凸性、极值(高中学过,不需要过多复习) 5、曲率公式曲率半径 第四章、第五章:积分 不定积分:1、两类换元法 2、分部积分法(注意加C ) 定积分: 1、定义 2、反常积分 第六章:定积分的应用 主要有几类:极坐标、求做功、求面积、求体积、求弧长 第七章:向量问题不会有很难 1、方向余弦 2、向量积 3、空间直线(两直线的夹角、线面夹角、求直线方程) 4、空间平面 5、空间旋转面(柱面)
第一章函数与极限 1、函数的有界性在定义域内有f(x)≥K1则函数f(x)在定义域上有下界,K1 为下界;如果有f(x)≤K2,则有上界,K2称为上界。函数f(x)在定义域内有界的充分必要条件是在定义域内既有上界又有下界。 2、数列的极限定理(极限的唯一性)数列{xn}不能同时收敛于两个不同的极限。 定理(收敛数列的有界性)如果数列{xn}收敛,那么数列{xn}一定有界。 如果数列{xn}无界,那么数列{xn}一定发散;但如果数列{xn}有界,却不能断定数列{xn}一定收敛,例如数列1,-1,1,-1,(-1)n+1…该数列有界但是发散,所以数列有界是数列收敛的必要条件而不是充分条件。 定理(收敛数列与其子数列的关系)如果数列{xn}收敛于a,那么它的任一子数列也收敛于a.如果数列{xn}有两个子数列收敛于不同的极限,那么数列{xn}是发散的,如数列1,-1,1,-1,(-1)n+1…中子数列{x2k-1}收敛于1,{xnk}收敛于-1,{xn}却是发散的;同时一个发散的数列的子数列也有可能是收敛的。 3、函数的极限函数极限的定义中0<|x-x0|表示x≠x0,所以x→x0时f(x)有没有极限与f(x)在点x0有没有定义无关。 定理(极限的局部保号性)如果lim(x→x0)时f(x)=A,而且A>0(或A<0),就存在着点那么x0的某一去心邻域,当x在该邻域内时就有f(x)>0(或f(x)>0),反之也成立。 函数f(x)当x→x0时极限存在的充分必要条件是左极限右极限各自存在并且相等,即f(x0-0)=f(x0+0),若不相等则limf(x)不存在。 一般的说,如果lim(x→∞)f(x)=c,则直线y=c是函数y=f(x)的图形水平渐近线。如果lim(x→x0)f(x)=∞,则直线x=x0是函数y=f(x)图形的铅直渐近线。 4、极限运算法则定理有限个无穷小之和也是无穷小;有界函数与无穷小的乘积是无穷小;常数与无穷小的乘积是无穷小;有限个无穷小的乘积也是无穷小;定理如果F1(x)≥F2(x),而limF1(x)=a,limF2(x)=b,那么a≥b. 5、极限存在准则两个重要极限lim(x→0)(sinx/x)=1;lim(x→∞)(1+1/x)x=1.夹逼准则如果数列{xn}、{yn}、{zn}满足下列条件:yn≤xn≤zn且limyn=a,limzn=a,那么limxn=a,对于函数该准则也成立。 单调有界数列必有极限。 6、函数的连续性设函数y=f(x)在点x0的某一邻域内有定义,如果函数f(x)当x→x0时的极限存在,且等于它在点x0处的函数值f(x0),即lim(x→x0)f(x)=f(x0),那么就称函数f(x)在点x0处连续。 不连续情形:1、在点x=x0没有定义;2、虽在x=x0有定义但lim(x→x0)f(x)不存在;3、虽在x=x0有定义且lim(x→x0)f(x)存在,但lim(x→x0)f(x)≠f(x0)时则称函数在x0处不连续或间断。 如果x0是函数f(x)的间断点,但左极限及右极限都存在,则称x0为函数f(x)的第一类间断点(左右极限相等者称可去间断点,不相等者称为跳跃间断点)。非第一类间断点的任何间断点都称为第二类间断点(无穷间断点和震荡间断点)。 定理有限个在某点连续的函数的和、积、商(分母不为0)是个在该点连续的函数。 定理如果函数f(x)在区间Ix上单调增加或减少且连续,那么它的反函数x=f(y)在对应的区间
第八章 多元函数微分法及其应用 第一节 多元函数的基本概念 本节主要概念,定理,公式和重要结论 理解多元函数的概念,会表达函数,会求定义域; 理解二重极限概念,注意A y x f y x y x =→),(lim ) ,(),(00是点),(y x 以任何方式趋于),(00y x ; 注意理解本节中相关概念与一元函数中相应内容的区分与联系。 习题 8-1 1.求下列函数表达式: (1)x y y x y x f +=),(,求),(y x xy f + 解:(,)()x y xy f xy x y xy x y ++=++ (2)2 2 ),(y x y x y x f -=-+,求),(y x f 解:(,)()()(,)f x y x y x y x y f x y xy +-=-+?= 2.求下列函数的定义域,并绘出定义域的图形: (1)2 2 1)1ln(y x x y x z --+ -+= 解:22 22 10 11010 x y x y x y x y x +->?+>??-->???+ (3) |)|||1ln(),(y x y x f --= 解:1||||0||||1x y x y -->?+< 3.求下列极限: (1) 2 2)1,0(),(1lim y x xy x y x ++-→ 解:22 (,)(0,1)1lim 1x y x xy x y →-+=+ (2) xy xy y x 4 2lim )0,0(),(+-→ 解一:(,)(0,0)(,)(0,0)(,)(0,0)18lim 2lim 2lim 4 x y x y x y xy xy →→→=-=-=- 解二: (,)(0,0)(,)(,)1 lim lim lim 4x y x y x y →→→===-
《机械原理》,孙桓主编,第八版,高等教育出版社,2013 考试大纲 一、考试内容及范围 1. 绪论 了解本课程的研究对象、内容、地位、作用和任务。 2. 平面机构的结构分析8~12% 能够正确绘制简单机构的运动简图;掌握平面机构自由度的计算及其注意事项(局部自由度、复合铰链、虚约束);理解运动副、约束、运动副元素的概念和机构具有确定运动的条件;掌握平面机构的组成原理、结构分类、结构分析和高副低代。 3. 平面机构运动分析 12~18% 掌握瞬心的概念,瞬心的求法,能够用瞬心法对平面机构进行速度分析;掌握矢量方程图解法(即相对运动图解法)对平面II级机构的(角)速度、(角)加速度的分析;能够综合运用瞬心法和矢量方程图解法对III级机构进行速度分析。 4. 平面连杆机构 8~15% 了解常用四杆机构的类型和特点;理解四杆机构传动角、死点位置、极位夹角、行程速比系数等概念;掌握铰链四杆机构、曲柄滑块机构有曲柄存在的条件;能够用图解法按给定的连杆三个位置(或连杆上标线位置)、连架杆三组对应位置、行程速比系数设计四杆机构。 4. 平面连杆机构 8~15% 了解常用四杆机构的类型和特点;理解四杆机构传动角、死点位置、极位夹角、行程速比系数等概念;掌握铰链四杆机构、曲柄滑块机构有曲柄存在的条件;能够用图解法按给定的连杆三个位置(或连杆上标线位置)、连架杆三组对应位置、行程速比系数设计四杆机构。 5. 凸轮机构 8~12% 了解凸轮机构的类型和特点;掌握从动件的常用运动规律(等速运动、等加速等减速运动、简谐运动(余弦运动)、摆线运动(正弦运动))的特点;理解凸轮压力角概念;掌握盘形凸轮机构的基圆半径与压力角、滚子半径与凸轮理论廓线曲率半径的定性关系;掌握反转法的原理,能够用图解法设计盘形凸轮轮廓曲线。 6. 齿轮机构 15~20% 了解齿轮机构的类型和特点;理解平面齿轮机构的齿廓啮合基本定律;掌握渐开线直齿圆柱齿轮的啮合特性(定传动比、可分性、正确啮合条件、重合度、连续传动条件)、渐开线标准直齿圆柱齿轮基本参数、几何尺寸的计算:了解渐开线齿轮切齿的基本原理、根切现象及产生根切原因、变位齿轮的概念,掌握切制标准渐开线直齿圆柱齿轮不发生根切的最少齿数。了解斜齿圆柱齿轮齿廓曲面的形成、传动特点;理解平行轴斜齿轮机构的正确啮合条件、斜齿轮的当量齿数概念并能计算当量齿数、斜齿轮的基本参数所在位置。了解蜗杆传动的特点;理解蜗杆蜗轮的正确啮 合条件、阿基米德蜗杆蜗轮的主要参数所在位置;能够计算标准蜗杆蜗轮传动的中心距、传动比。了解直齿圆锥齿轮齿廓曲面的形成;理解圆锥齿轮当量齿数的概念并能计算当量齿数、基本参数所在位置、正确啮合条件。 7. 轮系 10~14% 了解轮系的分类和应用。掌握定轴轮系、周转轮系和混合轮系的传动比计算。 8. 机械运转的速度波动及其调节10~14% 掌握机械系统等效力(力矩)、等效质量(转动惯量)的计算以及系统运动方程的建立;了解机械运转产生速度周期性、非周期性波动的原因及其调节方法;掌握飞轮转动惯量的计算 方法。
第一章:1、极限(夹逼准则) 2、连续(学会用定义证明一个函数连续,判断间断点类型) 第二章:1、导数(学会用定义证明一个函数是否可导)注:连续不一定可导,可导一定连续 2、求导法则(背) 3、求导公式也可以是微分公式 第三章:1、微分中值定理(一定要熟悉并灵活运用--第一节) 2、洛必达法则 3、泰勒公式拉格朗日中值定理 4、曲线凹凸性、极值(高中学过,不需要过多复习) 5、曲率公式曲率半径 第四章、第五章:积分 不定积分:1、两类换元法 2、分部积分法(注意加C ) 定积分: 1、定义 2、反常积分 第六章:定积分的应用 主要有几类:极坐标、求做功、求面积、求体积、求弧长
第七章:向量问题不会有很难 1、方向余弦 2、向量积 3、空间直线(两直线的夹角、线面夹角、求直线方程) 3、空间平面 4、空间旋转面(柱面) 第一章函数与极限 1、函数的有界性在定义域内有f(x)≥K1则函数f(x)在定义域上有下界,K1 为下界;如果有f(x)≤K2,则有上界,K2称为上界。函数f(x)在定义域内有界的充分必要条件是在定义域内既有上界又有下界。 2、数列的极限定理(极限的唯一性)数列{xn}不能同时收敛于两个不同的极限。 定理(收敛数列的有界性)如果数列{xn}收敛,那么数列{xn}一定有界。 如果数列{xn}无界,那么数列{xn}一定发散;但如果数列{xn}有界,却不能断定数列{xn}一定收敛,例如数列1,-1,1,-1,(-1)n+1…该数列有界但是发散,所以数列有界是数列收敛的必要条件而不是充分条件。 定理(收敛数列与其子数列的关系)如果数列{xn}收敛于a,那么它的任一子数列也收敛于a.如果数列{xn}有两个子数列收敛于不同的极限,那么数列{xn}是发散的,如数列1,-1,1,-1,(-1)n+1…中子数列{x2k-1}收敛于1,{xnk}收敛于-1,{xn}却是发散的;同时一个发散的数列的子数列也有可能是收敛的。 3、函数的极限函数极限的定义中0<|x-x0|表示x≠x0,所以x→x0时f(x)有没有极限与f(x)在点x0有没有定义无关。 定理(极限的局部保号性)如果lim(x→x0)时f(x)=A,而且A>0(或A<0),就存在着点那么x0的某一去心邻域,当x在该邻域内时就有f(x)>0(或f(x)>0),反之也成立。 函数f(x)当x→x0时极限存在的充分必要条件是左极限右极限各自存在并且相等,即f(x0-0)=f(x0+0),若不相等则limf(x)不存在。 一般的说,如果lim(x→∞)f(x)=c,则直线y=c是函数y=f(x)的图形水平渐近线。如果lim(x→x0)f(x)=∞,则直线x=x0是函数y=f(x)图形的铅直渐近线。 4、极限运算法则定理有限个无穷小之和也是无穷小;有界函数与无穷小的乘积是无穷小;常数与无穷小的乘积是无穷小;有限个无穷小的乘积也是无穷小;定理如果F1(x)≥F2(x),而limF1(x)=a,limF2(x)=b,那么a≥b. 5、极限存在准则两个重要极限lim(x→0)(sinx/x)=1;lim(x→∞)(1+1/x)x=1.夹逼准则如果数列{xn}、{yn}、{zn}满足下列条件:yn≤xn≤zn且limyn=a,limzn=a,那么limxn=a,对于函数该准则也成立。 单调有界数列必有极限。 6、函数的连续性设函数y=f(x)在点x0的某一邻域内有定义,如果函数f(x)当x→x0时的极限存在,且等于它在点x0处的函数值f(x0),即lim(x→x0)f(x)=f(x0),那么就称函数f(x)在点x0处连续。 不连续情形:1、在点x=x0没有定义;2、虽在x=x0有定义但lim(x→x0)f(x)不存在;3、虽在x=x0有定义且lim(x→x0)f(x)存在,但lim(x→x0)f(x)≠f(x0)时则称函数在x0处不连续或间断。 如果x0是函数f(x)的间断点,但左极限及右极限都存在,则称x0为函数f(x)的第一类间断点(左右极限相等者称可去间断点,不相等者称为跳跃间断点)。非第一类间断点的任何间断点都称为第二类间断点(无穷间断点和震荡间断点)。 定理有限个在某点连续的函数的和、积、商(分母不为0)是个在该点连续的函数。
机械振动测试题及解析 1.[多选](2019·江苏高考)一单摆做简谐运动,在偏角增大的过程中,摆球的() A.位移增大B.速度增大 C.回复力增大D.机械能增大 解析:选AC在单摆的偏角增大的过程中,摆球远离平衡位置,故位移变大,速度变小,回复力变大,机械能保持不变,选项A、C正确。 2.[多选]关于简谐运动,以下说法正确的是() A.间隔一个周期的整数倍的两个时刻,物体的振动情况相同 B.间隔半个周期的奇数倍的两个时刻,物体的速度和加速度可能同时相同 C.半个周期内物体的动能变化一定为零 D.一个周期内物体的势能变化一定为零 E.经过一个周期质点通过的路程变为零 解析:选ACD根据周期的定义可知,物体完成一次全振动,所有的物理量都恢复到初始状态,故选项A、D正确。当间隔半个周期的奇数倍时,所有的矢量都变得大小相等、方向相反,且物体的速度和加速度不同时为零,故选项B错误,C正确。经过一个周期,质点通过的路程为4A,选项E错误。3.[多选]用弹簧将一物块悬挂于天花板上,使物块在竖直方向做简谐振动, 其振动图像如图所示,则() A.该简谐振动的周期为2.0 s B.t=1.0 s时刻系统能量达到最小值 C.t=1.0 s和t=2.0 s两个时刻物块动能相等 D.t=0.5 s和t=1.5 s两个时刻弹簧的弹性势能相等 E.t=0.5 s和t=1.5 s两个时刻物块的加速度均为最大值但不相同 解析:选ACE由题图读出周期为T=2.0 s,故A正确。物块做简谐运动的过程中系统的机械能守恒,各时刻的机械能都是相等的,故B错误。由题图可知t=1.0 s和t=2.0 s两个时刻物块都在平衡位置,则两个时刻的动能相等且为最大值,故C正确。由题图看出,t=0.5 s物块位于正的最大位移处,t= 1.5 s时物块位于负的最大位移处,两时刻物块的位移大小相等、方向相反;由于物块在平衡位置时, 弹簧处于拉长状态,所以t=0.5 s和t=1.5 s两个时刻弹簧的弹性势能不相等,故D错误。t=0.5 s物块位于正的最大位移处,t=1.5 s时物块位于负的最大位移处,两时刻物块的位移大小相等、方向相反,所以两个时刻物块的回复力以及加速度都是大小相等,为最大值,但方向相反,故E正确。 4.[多选](2020·昆明模拟)下列说法正确的是() A.在同一地点,单摆做简谐振动的周期与其摆长成正比 B.弹簧振子做简谐振动时,振动系统的势能与动能之和保持不变 C.单摆做简谐振动时,摆长越长,单摆做简谐振动的周期越小 D.系统做稳定的受迫振动时,系统振动的频率等于周期性驱动力的频率